SMC气动基础基本回路
合集下载
(完整版)SMC气动基础--基本回路

路 中位排气式
中位时两个出气口 与排气口相通
气缸活塞杆可以任意推动
14
换向回路练习题
15
压力(力)控制回路
16
压力(力)控制回路 ——气源压力控制回路
• 气源压力控制主要是指使空压
机的输出压力保持在储气罐所允
P≤Ps
许的额定压力以下
Ps
溢流阀控制气罐
的最大允许压力
17
压力(力)控制回路 ——工作压力控制回路
• 图中节流阀S1调节为高速,节流阀S2调节 为低速
SD1 SD2 气缸速度
--
0
+-
低速
SD1
++
高速
SD2
S1
S2
低速
高速
37
速度控制回路 ——双速驱动回路
• 利用高低速两个节流阀实现 高低速切换
• 图中节流阀S1调节为高速,节流阀S2调节 为低速
SD1 SD2 --
+++
气缸速度 0
低速 高速
--
0
+-
A
SD1
++
B
SD2
27
位置控制回路 ——带锁气缸
•利用带锁气缸,可以实现中间 定位控制
• 二位三通电磁阀SD3失电,带 锁气缸锁紧制动;得电,制动 解除
SD1
SD2
SD3
28
產品&环境
焊接生产线上使用的夹紧气缸
问题
由于设计的要求,采用中央封闭3/5通阀,实现夹紧气缸中央停留位置,以等 待下一工件的到位. 如果等待的时间略长,气缸会在夹紧臂自重的影响下,自动伸出,影响生产.
Z
2
中位时两个出气口 与排气口相通
气缸活塞杆可以任意推动
14
换向回路练习题
15
压力(力)控制回路
16
压力(力)控制回路 ——气源压力控制回路
• 气源压力控制主要是指使空压
机的输出压力保持在储气罐所允
P≤Ps
许的额定压力以下
Ps
溢流阀控制气罐
的最大允许压力
17
压力(力)控制回路 ——工作压力控制回路
• 图中节流阀S1调节为高速,节流阀S2调节 为低速
SD1 SD2 气缸速度
--
0
+-
低速
SD1
++
高速
SD2
S1
S2
低速
高速
37
速度控制回路 ——双速驱动回路
• 利用高低速两个节流阀实现 高低速切换
• 图中节流阀S1调节为高速,节流阀S2调节 为低速
SD1 SD2 --
+++
气缸速度 0
低速 高速
--
0
+-
A
SD1
++
B
SD2
27
位置控制回路 ——带锁气缸
•利用带锁气缸,可以实现中间 定位控制
• 二位三通电磁阀SD3失电,带 锁气缸锁紧制动;得电,制动 解除
SD1
SD2
SD3
28
產品&环境
焊接生产线上使用的夹紧气缸
问题
由于设计的要求,采用中央封闭3/5通阀,实现夹紧气缸中央停留位置,以等 待下一工件的到位. 如果等待的时间略长,气缸会在夹紧臂自重的影响下,自动伸出,影响生产.
Z
2
气动基本回路
2、气动常用回路
15、从两个不同地点控制双作用气缸的单往复运动
如图12-24所示回路,无论用手或用脚发出信号,操纵阀1S1、1S2, 均能使主阀1V1切换,活塞前进,活塞杆伸出碰到行程阀1S2后立即后退。
2、气动常用回路
16、慢速前进、快速后退回路
如图12-25所示回路,按下按钮阀1S1后,主控阀1V1换向,活塞前进,速度 由阀1V2控制,当活塞杆碰到行程阀1S2时,活塞后退,快速排气阀1V3可增加 其后退速度。
1、单作用气缸的控制 控制单作用气缸的前进、后退必须采用二位三通阀。如图12-8所 示单作用气缸控制回路,按下按钮,压缩空气从1口流向2口,活塞伸 出,3口遮断,单作用气缸活塞杆伸出。放开按钮,阀内弹簧复位, 缸内压缩空气由2口流向3口排放,1口被遮断,气缸活塞杆在复位弹 簧作用下立即缩回。
2、气动常用回路
1、气动基本回路
3、各种元件的表示方法 在回路图中,阀和气缸尽可能水平放置。回路中的所有元件均以起始位置 表示,否则另加注释。阀的位置定义如下: 1. 正常位置:阀芯未操纵时阀的位置。 2. 起始位置:阀已安装在系统中并已通气供压后,阀芯所处的位置应标明。如图 12-5所示的滚轮杠杆阀(信号元件),正常位置为关闭阀位,当在系统中被活 塞杆的凸轮板压下时,其起始位置变成通路,应表示成图12-5(b)所示。 对于单向滚轮杠杆阀,因其只能在单方向发出控制信号,因此在回路图中 必须以箭头表示出对元件发生作用的方向,逆向箭头表示无作用,如图12-6所 示。
气动程序控制回路
时间程序控制是指各执行元件的动作顺序按时间顺序 进行的一种自动控制方式。时间信号通过控制线路,按一 定的时间间隔分配给相应的执行元件,令其产生有顺序的 动作,它是一种开环的控制系统。图12-26(a)所示为时 间程序控制方框图。
气动基本回路最全的
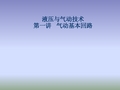
过载保护回路
过载保护回路 正常工作时,阀1 得电, 使阀2 换向,气缸活塞 杆外伸。如果活塞杆受 压的方向发生过载,则 顺序阀动作,阀3 切换, 阀2 的控制气体排出, 在弹簧力作用下换至图 示位置,使活塞杆缩回。
力控制回路
气动系统一般压力较低,所以往往是通过改变执 行元件的受力面积来增加输出力。
▪ 单作用气缸快速返回回路活塞返回时,气缸下腔▪ 串联调速回路 通过两个单向节流阀, 利用液压油不可压缩 的特点,实现两个方 向的无级调速,油杯 为补充漏油而设。
▪ 气液缸串联变速回路 当活塞杆右行到撞块A 碰到机动换向阀后开始 作慢速运动。改变撞块 的安装位置,即可改变 开始变速的位置。
换向回路
▪ 单作用气缸换向回路 用三位五通换向阀可控制单 作用气缸伸、缩、任意位置停止。
换向回路
▪ 双作用气缸换向回路 用三位五通换向阀除控制 双作用缸伸、缩换向外,还可实现任意位置停止。
速度控制回路
▪ 气阀调速回路 ▪ 单作用气缸调速回路 用两个单向节流阀分别控制活塞杆的
升降速度。
速度控制回路
气液联动速度控制回路
▪ 气液缸并联且有中间位 置停止的变速回路 气 缸活塞杆端滑块空套在 液压阻尼缸活塞杆上, 当气缸运动到调节螺母 6 处时,气缸由快进转 为慢进。液压阻尼缸流 量由单向节流阀2 控制, 蓄能器能调节阻尼缸中 油量的变化。
位置控制回路
▪ 串联气缸定位
气缸由多个不 同行程的气缸串 联而成。换向阀 1、2、3依次得 电和同时失电, 可得到四个定位 位置。
位置控制回路
▪ 任意位置停止 回路 当气缸负载较 小时,可选择 图a 所示回路, 当气缸负载较 大时,应选择 图b 所示回路。
常用基本回路
过载保护回路 正常工作时,阀1 得电, 使阀2 换向,气缸活塞 杆外伸。如果活塞杆受 压的方向发生过载,则 顺序阀动作,阀3 切换, 阀2 的控制气体排出, 在弹簧力作用下换至图 示位置,使活塞杆缩回。
力控制回路
气动系统一般压力较低,所以往往是通过改变执 行元件的受力面积来增加输出力。
▪ 单作用气缸快速返回回路活塞返回时,气缸下腔▪ 串联调速回路 通过两个单向节流阀, 利用液压油不可压缩 的特点,实现两个方 向的无级调速,油杯 为补充漏油而设。
▪ 气液缸串联变速回路 当活塞杆右行到撞块A 碰到机动换向阀后开始 作慢速运动。改变撞块 的安装位置,即可改变 开始变速的位置。
换向回路
▪ 单作用气缸换向回路 用三位五通换向阀可控制单 作用气缸伸、缩、任意位置停止。
换向回路
▪ 双作用气缸换向回路 用三位五通换向阀除控制 双作用缸伸、缩换向外,还可实现任意位置停止。
速度控制回路
▪ 气阀调速回路 ▪ 单作用气缸调速回路 用两个单向节流阀分别控制活塞杆的
升降速度。
速度控制回路
气液联动速度控制回路
▪ 气液缸并联且有中间位 置停止的变速回路 气 缸活塞杆端滑块空套在 液压阻尼缸活塞杆上, 当气缸运动到调节螺母 6 处时,气缸由快进转 为慢进。液压阻尼缸流 量由单向节流阀2 控制, 蓄能器能调节阻尼缸中 油量的变化。
位置控制回路
▪ 串联气缸定位
气缸由多个不 同行程的气缸串 联而成。换向阀 1、2、3依次得 电和同时失电, 可得到四个定位 位置。
位置控制回路
▪ 任意位置停止 回路 当气缸负载较 小时,可选择 图a 所示回路, 当气缸负载较 大时,应选择 图b 所示回路。
常用基本回路
第十四章-气动基本回路
第六节 延时回路
右图为延时输出回路。
左图为气缸延时返回 回路。
第七节 安全保护和操作回路
由于气动机构负荷的过载、气压的突然降低 以及气动执行机构的快速动作等原因,都可 能危及操作人员或设备的安全,因此在气动 回路中,常常需要设计安全保护回路。
一、过载保护回路
活塞杆在伸 出过程中, 系统过载时, 活塞杆立即 缩回。
用行程阀控制的单缸单往复动作回路。
下图为用阻容控制的单缸 单往复延时返回回路。
上图为用压力阀控制的 单缸单往复动作回路。
2、单缸多往复动作回路
按下带定位装置的手动 阀1:连续往复运动; 松开带定位装置的手动 阀1:下位工作,气缸停 止运动。
二、互锁回路
只有三个机动换向阀同时 动作,主控阀才能换向, 气缸才能伸出。
三、双手操作安全回路
锻压、冲压设备中必须设置 安全保护回路,以保证操作 者双手的安全。
左图为“与”回路的双 手操作安全回路。 注意: 两个手动阀的安装距离必 须保证单手不能同时操作。
1、阀2与阀3同时按 下:主控阀上位工 作,气缸伸出;
✓为获得稳定的运动速 度,气动系统多采用出 口节流调速。
2、双向调速回路
✓排气节流阀
调速回路 : 通过两个单向 节流阀或两个 排气节流阀控 制气缸伸缩的 速度。
三、快速往返运动回路
用两个快排阀实现双 作用气缸的快速往返, 可达到节省时间的要 求。
四、速度换接回路
采用二位二通 阀与节流阀并联, 由行程开关发出电 信号,控制二位二 通阀换向,改变排 气通路,从而控制 气缸速度改变。行 程开关的位置,可 根据需要选定。
五、缓冲回路
活塞快速向右运 动接近末端,压下机 动换向阀,气体经节 流阀排气,活塞低速 运动到终点。
气动基本回路与常用回路

15
增加单作用气缸及双作用气缸的速度
图12-15为增加单作用缸活塞后退的速度回路,当活塞后退时,气 缸中的压缩空气经快速排气阀1V1的3口直接排放,不需经换向阀,减 少排气阻力,故活塞可快速后退。
图12-16为增加双作用气缸活塞前进的速度回路,双作用气缸前进 时在气缸排气口加一个快速排气阀1V1减小排气阻力。
气动基本回路与常用回路
❖ 气动基本回路 ❖ 气动常用回路
2020年8月4日5时48分
1
十一章、气动基本回路
❖ 气动基本回路 压力和力控制回路 换向回路 速度控制回路 位置控制回路 基本逻辑回路
2020年8月4日5时48分
2
11.1压力控制回路
▪ 1.一次压力控制回路
电接触式压力表根据 贮气罐压力控制空压机 的起、停,一旦贮气罐 压力超过一定值时,溢 流阀起安全保护作用。
控制只能用出口节流方式,如图12-13(b)。如果单作 用气缸前进及后退速度都需要控制,则可以同时
采用两个节流阀控制, 回路如图12-13(c) 所示。
活塞前进时由节流阀 1V1控制速度,活塞 后退时由节流阀1V2 控制速度。
2020年8月4日5时48分
14
双作用气缸的速度控制
2020年8月4日5时48分
❖ 简单压力控制回路 采用溢流式减压阀对气 源实行定压控制。
2020年8月4日5时48分
3
2.二次压力控制回路
❖ 作用:对气动系统气源压力的控制
❖ 图a是由气动三联件组成的主要由 溢流减压阀来实现压力控制;图b 是由减压阀和换向阀构成的,对同 一系统实现输出高、低压力p1、p2 的控制;图c是由减压阀来实现对 不同系统输出不同压力P1、P2的 控制。
气动基本回路-减速控制

回路No.
回路名称
目的
基本回路
①减速器(N.O.)
②5通电磁阀(中压型)
③3通电磁阀(N.C.)
④带单向阀的减压阀
⑤双向带锁气缸(弹簧锁定)
说明
注意点
(1)(2)为使锁定的应答快速,请尽量将锁定用3通电磁阀③靠近气缸安装。
通过带单项阀的减压阀④,实现同负载间的压力平衡。
通常使用双向带锁气缸⑤时,必须考虑锁定时的许容运动能。
气缸运动速度过高的话,超过许容运
动能,可能导致锁定部位的破损及使用寿命的急剧缩短。
因此,在加载锁定时,使用减速器①减速
后,再使锁定机构动作。
利用减速器,实现减速控制与中间停止。
3-2-4
减速控制
SMC(中国)有限公司
技术中心
①
②
③
④
⑤
W。
气动基本回路与常用回路

12.1 方向控制回路
▪ 单作用气缸换向回路 用三位五通换向阀可控制单作用 气缸伸、缩、任意位置停止。
12.1 方向控制回路
▪ 双作用气缸换向回路
用三位五通换向阀除控制双作用
缸伸、缩换向外,还可实现任意位置停止。
12.2 压力控制回路
▪ 压力控制回路
电接触式压力表根据贮气 罐压力控制空压机的起、 停,一旦贮气罐压力超过 一定值时,溢流阀起安全 保护作用。 简单压力控制回路 采用溢流式减压阀对气源 实行定压控制。
当今,落地式铣镗床发展的最大特点是 向高速 铣削发 展,均 为滑枕 式(无 镗轴)结 构,并 配备各 种不同 工艺性 能的铣 头附件 。该结 构的优 点是滑 枕的截 面大, 刚性好 ,行程 长,移 动速度 快,便 于安装 各种功 能附件 ,主工艺 性能及 加工范 围达到 极致, 大大提 高了加 工速度 与效率 。
三、往复动作回路 ▪ 连续往复动作回
路 手动阀1 换向,高 压气体经阀3 使阀 2换向,气缸活塞 杆外伸,阀3 复位, 活塞杆挡块压下行 程阀4 时,阀2 换 至左位,活塞杆缩 回,阀4 复位,当 活塞杆缩回压下行 程阀3 时,阀2 再 次换向,如此循环 往复。
精品课件文档,欢迎下载,下 载后可以复制编辑。
工艺特点
更多精品文档,欢迎浏览。
高速电主轴在卧式镗铣床上的应用 越来越 多,除 了主轴 速度和 精度大 幅提高 外,还 简化了 主轴箱 内部结 构,缩 短了制 造周期 ,尤其 是能进 行高速 切削, 电主轴 转速最 高可大10000r/min以 上。不 足之处 在于功 率受到 限制, 其制造 成本较 高,尤 其是不 能进行 深孔加 工。而 镗杆伸 缩式结 构其速 度有限 ,精度 虽不如 电主轴 结构, 但可进 行深孔 加工, 且功率 大,可 进行满 负荷加 工,效 率高, 是电主 轴无法 比拟的 。因此 ,两种 结构并 存,工 艺性能 各异, 却给用 户提供 了更多 的选择 。
气动基本回路与常用回路

单作用气缸调速回路 度。 用两个单向节流阀分别控制活塞杆的升降速
12.3 速度控制回路
单作用气缸快速返回回路活塞返回时,气缸下腔通过快速排 气阀排气。
气液联动速度控制回路
串联调速回路 通 过两个单向节流阀,利 用液压油不可压缩的特 点,实现两个方向的无 级调速,油杯为补充漏 油而设。 信号输出。
第十二章 气动基本回路与常用回路
气动基本回路 气动常用回路
气动基本回路
气动基本回路
方向控制回路 压力控制回路 速度控制回路 其它控制回路
12.1 方向控制回路
单作用气缸换向回路 用三位五通换向阀可控制单作用 气缸伸、缩、任意位置停止。
12.1 方向控制回路
双作用气缸换向回路
逻辑表达式 S =
a+b
逻辑符号
气液联动速度控制回路
气液缸串联变
速回路 当活塞 杆右行到撞块A 碰到机动换向阀 后开始作慢速运 动。改变撞块的 安装位置,即可 改变开始变速的 位置。
气液联动速度控制回路
气液缸并联且有中间位置 停止的变速回路 气缸活 塞杆端滑块空套在液压阻 尼缸活塞杆上,当气缸运 动到调节螺母 6 处时,气 缸由快进转为慢进。液压 阻尼缸流量由单向节流阀 2 控制,蓄能器能调节阻 尼缸中油量的变化。
三、往复动作回路
单往复动作回路
按下手动阀,二位 五通换向阀处于左 位,气缸外伸;当 活塞杆挡块压下机 动阀后,二位五通 换至右位,气缸缩 回,完成一次往复 运动。
三、往复动作回路
路 手动阀1 换向,高 压气体经阀3 使阀 2换向,气缸活塞 杆外伸,阀3 复位, 活塞杆挡块压下行 程阀4 时,阀2 换 至左位,活塞杆缩 回,阀4 复位,当 活塞杆缩回压下行 程阀3 时,阀2 再 次换向,如此循环 往复。
12.3 速度控制回路
单作用气缸快速返回回路活塞返回时,气缸下腔通过快速排 气阀排气。
气液联动速度控制回路
串联调速回路 通 过两个单向节流阀,利 用液压油不可压缩的特 点,实现两个方向的无 级调速,油杯为补充漏 油而设。 信号输出。
第十二章 气动基本回路与常用回路
气动基本回路 气动常用回路
气动基本回路
气动基本回路
方向控制回路 压力控制回路 速度控制回路 其它控制回路
12.1 方向控制回路
单作用气缸换向回路 用三位五通换向阀可控制单作用 气缸伸、缩、任意位置停止。
12.1 方向控制回路
双作用气缸换向回路
逻辑表达式 S =
a+b
逻辑符号
气液联动速度控制回路
气液缸串联变
速回路 当活塞 杆右行到撞块A 碰到机动换向阀 后开始作慢速运 动。改变撞块的 安装位置,即可 改变开始变速的 位置。
气液联动速度控制回路
气液缸并联且有中间位置 停止的变速回路 气缸活 塞杆端滑块空套在液压阻 尼缸活塞杆上,当气缸运 动到调节螺母 6 处时,气 缸由快进转为慢进。液压 阻尼缸流量由单向节流阀 2 控制,蓄能器能调节阻 尼缸中油量的变化。
三、往复动作回路
单往复动作回路
按下手动阀,二位 五通换向阀处于左 位,气缸外伸;当 活塞杆挡块压下机 动阀后,二位五通 换至右位,气缸缩 回,完成一次往复 运动。
三、往复动作回路
路 手动阀1 换向,高 压气体经阀3 使阀 2换向,气缸活塞 杆外伸,阀3 复位, 活塞杆挡块压下行 程阀4 时,阀2 换 至左位,活塞杆缩 回,阀4 复位,当 活塞杆缩回压下行 程阀3 时,阀2 再 次换向,如此循环 往复。
气动基本回路的原理和应用
速度控制回路
气动系统功率不大,主要用节流调速的调速方法
气阀调速回路
单作用气缸调速回路 用两个单向节流阀分别控 制活塞杆的升降速度。
Hale Waihona Puke 单作用气缸快速返回回路 活塞返回时,气缸下腔 通过快速排气阀排气。
速度控制回路
气阀调速回路
排气节流阀调速回路 通过两个排气节流 阀控制气缸伸缩的 速度。
缓冲回路 活塞快速向右运动接近末端,压 下机动换向阀,气体经节流阀排 气,活塞低速运动到终点。
液压传动与气动技术
气动基本回路的原理和应用
知识点 ➢ 气动基本回路的原理与应用
技能点 ➢ 能够绘制基本的气动回路
工作任务 ➢ 搭建基本气动回路 ➢ 阅读较简单的气动系统图
气动基本回路
换向回路
单作用气缸换向回路 用三位五通换向阀可 控制单作用气缸伸、 缩、任意位置停止。
双作用气缸换向回路
用三位五通换向阀除控 制双作用缸伸、缩换向 外,还可实现任意位置 停止。
任意位置停止回路
气缸由多个不同行程的气缸 串联而成。换向阀1、2、3 依次得电和同时失电,可得 到四个定位位置。
当气缸负载较小时,可选择图a 所 示回路,当气缸负载较大时,应选 择图b 所示回路。当停止位置要求 精确时,可选择前面所讲的气液阻 尼缸任意位置停止回路。
基本逻辑回路
气动常用回路
安全保护回路
速度控制回路
气液联动速度控制回路 气液缸串联调速回路 通过两个单向节流阀,利用液压油不 可压缩的特点,实现两个方向的无级 调速,油杯为补充漏油而设。
气液缸串联变速回路 当活塞杆右行到撞块A 碰到机动换向 阀后开始作慢速运动。改变撞块的安 装位置,即可改变开始变速的位置。
气动基本回路与常用回路课件

气动三位置控制回路
总结词
通过使用单作用气缸和三位四通阀,实现对执行机构三 个位置的控制。
详细描述
三位置控制回路通常用于对执行机构进行精确的位置控 制。通过使用单作用气缸和三位四通阀,可以实现对执 行机构的三个位置的控制。其中,单作用气缸只有一个 工作腔,通过充气和排气来驱动执行机构进行运动。三 位四通阀具有三个工作位置,通过切换工作位置来实现 执行机构的三个不同位置的控制。
04
气动回路设计方法与技巧
明确设计要求与参数
了解客户需求
在开始设计之前,要与客户进行充分沟通, 明确了解设计要求和参数,包括工作压力、 工作流量、工作速度、负载类型等。
制定设计方案
根据客户需求,制定详细的设计方案,包括 气动系统的组成、元件的选择、回路的设计 等。
选择合适的元件与组合方式
选择合适的元件
压力控制阀的种类包括减压阀、安全 阀、顺序阀等,其工作原理是根据系 统压力的变化自动调节阀门开口大小 ,以保持系统压力稳定。
速度控制回路
速度控制回路是指利用流量控制阀对压缩空气的流量进行 控制的回路,常用于控制气缸的运动速度。
流量控制阀的种类包括节流阀、调速阀等,其工作原理是 通过改变阀门开口大小来控制压缩空气的流量,以实现气 缸运动速度的控制。
换向阀的种类包括手动换向阀、电磁换向阀、液动换向阀等,其工作原理是当压 缩空气从进气口进入时,推动阀芯移动,使气流从进气口通过阀芯上的通道流向 排气口,同时关闭原排气口,使原进气口成为排气口,从而实现气缸的往复运动 。
压力控制回路
压力控制回路是指利用压力控制阀对 压缩空气的压力进行控制的回路,常 用于保证气动执行机构在规定压力下 正常工作。
详细描述
顺序动作回路可以实现自动化控制, 例如在机械手或自动化生产线中,根 据预设的程序,使多个气动元件协同 工作,实现复杂的机械运动。
相关主题