斜线 PWM 及其派生电流跟踪方法
第6章+PWM控制技术
第6章 PWM控制技术6. l.试说明PWM控制的基本原理。
答:PWM控制就是对脉冲的宽度进行调制的技术。
即通过对一系列脉冲的宽度进行调制来等效地获得所需要波形(含形状和幅值)。
在采样控制理论中有一条重要的结论:冲量相等而形状不同的窄脉冲加在具有惯性环节上时,其效果基本相同,冲量即窄脉冲的面积。
效果基本相同是指环节的输出响应波形基本相同。
上述原理称为面积等效原理。
以正弦PWM控制为例。
把正弦半波分成N等分,就可把其看成是N个彼此相连的脉冲列所组成的波形。
这些脉冲宽度相等,都等于π/N,但幅值不等且脉冲顶部不是水平直线而是曲线,各脉冲幅值按正弦规律变化。
如果把上述脉冲列利用相同数量的等幅而不等宽的矩形脉冲代替,使矩形脉冲的中点和相应正弦波部分的中点重合,且使矩形脉冲和相应的正弦波部分面积(冲量)相等,就得到PWM波形。
各PWM脉冲的幅值相等而宽度是按正弦规律变化的。
根据面积等效原理,PWM波形和正弦半波是等效的。
对于正弦波的负半周,也可以用同样的方法得到PWM波形。
可见,所得到的PWM波形和期望得到的正弦波等效。
6.4特定谐波消去法的基本原理是什么?设半个信号波周期内有10个开关时刻(不含0和π时刻)可以控制,可以消去的谐波有几种?答:首先尽量使波形具有对称性,为消去偶次谐波,应使波形正负两个半周期对称,为消去谐波中的余弦项,使波形在正半周期前后1/4周期以π/2为轴线对称。
考虑到上述对称性,半周期内有5个开关时刻可以控制。
利用其中的l个自由度控制基波的大小,剩余的4个自由度可用于消除4种频率的谐波。
6.5.什么是异步调制?什么是同步调制?两者各有何特点?分段同步调制有什么优点?答:载波信号和调制信号不保持同步的调制方式称为异步调制。
在异步调制方式中,通常保持载波频率f c固定不变,因而当信号波频率f r变化时,载波比N是变化的。
异步调制的主要特点是:在信号波的半个周期内,PWM波的脉冲个数不固定,相位也不固定,正负半周期的脉冲不对称,半周期内前后1/4周期的脉冲也不对称。
PWM基本原理及其实现方法

ICR1=0x00FF;
11
PWM实现程序
直流电机控制函数 void dc_moto_control(uint8 *point)
包含:
if(0x80 == *point)
M1_T; //MOTO1停止
else if(*point < 0x80)
{
OCR0 = 70 + (uint8)(((uint16)(0x7f - *point) * 145)/100);
2
电枢电压“占空比”与平均电 压关系图
3
电枢电压“占空比”与平均电 压关系
Vd = Vmax*D 式中,Vd——电机的平均速度; Vmax——电机全通电时的速度(最大); D = t1/T 当我们改变占空比 D = t1/T 时,就可以得到
不同的电机平均速度,从而达到调速的目的。 严格地讲,平均速度 n 与占空比 D 并不是严 格的线性关系,在一般的应用中,可以将其近 似地看成线性关系。
OCR2 = 70 + (uint8)(((uint16)(0x7f - *(point+1)) * 145)/100);
M2_L;
}
else
{
OCR2 = 70 + (uint8)(((uint16)(*(point+1) - 0x80) * 145)/100);
M2_R;
}
13
PWM实现程序
if(0x80 == *(point+2)) M3_T; //MOTO3停止
else if(*(point+2) < 0x80)
{
OCR1A = 70 + (((uint16)(0x7f - *(point+2)) * 145)/100);
几种PWM控制方法

几种PWM控制方法PWM(脉宽调制)是一种广泛应用于电子设备中的控制方法,通过控制信号的脉冲宽度来改变电路或设备的输出功率。
以下是几种常见的PWM 控制方法:1.定频PWM控制定频PWM控制是一种简单而常见的PWM控制方法,通过将固定频率的脉冲信号与一个可变的占空比相乘来实现控制。
脉冲的高电平时间代表设备处于工作状态的时间比例,而低电平时间代表设备处于停止状态的时间比例。
定频PWM控制可通过调整脉冲的占空比来改变输出功率,但频率固定不变。
2.双边PWM控制双边PWM控制是一种可调节频率和占空比的PWM控制方法。
与定频PWM不同的是,双边PWM控制可以根据需求调整脉冲的频率和占空比。
通过改变脉冲的频率和占空比,可以获得较高的精度和更灵活的控制效果。
3.单脉冲宽度调制(SPWM)单脉冲宽度调制是一种通过调整脉冲宽度的PWM控制方法。
与常规PWM不同的是,SPWM控制中只有一个脉冲被发送,其宽度和位置可以根据需求进行调整。
SPWM控制常用于逆变器和交流驱动器等高精度要求的应用,可以实现比其他PWM控制方法更精确的波形控制。
4.多级PWM控制多级PWM控制是一种在多个层次上进行PWM调制的控制方法。
通过将一系列的PWM信号级联起来,每个PWM信号的频率和占空比不同,可以实现更高精度和更复杂的波形控制。
多级PWM控制常用于高性能电机驱动器、中央处理器(CPU)和功率放大器等需要高精度信号处理的应用。
5.空间矢量调制(SVPWM)空间矢量调制是一种通过调整电压矢量的方向和大小来实现PWM控制的方法。
SVPWM通过控制电压矢量之间的切换来生成输出波形,可以实现较高的电压和电流控制精度。
空间矢量调制常用于三相逆变器、电子制动器和无刷直流电机等高功率应用中,可以实现高质量的输出波形。
6.滑模PWM控制滑模PWM控制是一种通过添加滑模调节器来实现PWM控制的方法。
滑模调节器可以通过反馈控制来实现系统的快速响应和鲁棒性,从而实现更好的控制效果。
电流控制技术和斜坡补偿
电流控制技术和斜坡补偿叶泽刚时间:2010-11-29 594次阅读【网友评论0条我要评论】收藏电源网讯一、电流型控制原理及特点原理:电流型脉宽调制(PWM)控制器是在普通电压反馈PWM 控制环内部增加了电流反馈的控制环节,因而除了包含电压型PWM 控制器的功能外,还能检测开关电流或电感电流,实现电压电流的双环控制。
控制原理框图如下图(图1)所示。
图 1 双环电流型控制器原理图从图 1 可以看出,电流型控制器有两个控制闭合环路:一个是输出电压反馈误差放大器A,用于与基准电压比较后产生误差电压;另一个是变压器初级(电感)中电流在Rs 上产生的电压与误差电压进行比较,产生调制脉冲的脉宽,使得误差信号对峰值电感电流起着实际控制作用。
系统工作过程如下:假定输入电压下降,整流后的直流电压下降,经电感延迟使输出电压下降,经误差放大器延迟Vca 上升,占空比变化,从而维持输出电压不变,在电流环中电感的峰值电流也随输入电压下降,电感电流的斜率di/dt 下降,导致斜坡电压推迟到达Vca,使PWM 占空比加大,起到调整输出电压的作用。
由于既对电压又对电流起控制作用,所以控制效果较好在实际中得到广泛应用。
特点:a)由于输入电压Vi 的变化立即反映为电感电流的变化,不经过误差放大器就能在比较器中改变输出脉冲宽度(电流控制环),因而使得系统的电压调整率非常好,可达到0.01%V, 能够与线性移压器相比。
b)由于双环控制系统内在的快速响应和高稳定性,反馈回路的增益较高,不会造成稳定性与增益的矛盾,使输出电压有很高的精度。
c)由于Rs 上感应出峰值电感电流,只要Rs 上电平达到1V,PWM 控制器就立即关闭,形成逐个脉冲限流电路,使得在任何输入电压和负载瞬态变化时,功率开关管的峰值电流被控制在一定范围内,在过载和短路时对主开关管起到有效保护。
d)误差放大器用于控制,由于负载变化造成的输出电压变化,使得当负载减小时电压升高的幅度大大减小,明显改善了负载调整率。
几种PWM调制方法
引言采样控制理论中有一个重要结论:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。
PWM控制技术就是以该结论为理论基础,对半导体开关器件的导通和关断进行控制,使输出端得到一系列幅值相等而宽度不相等的脉冲,用这些脉冲来代替正弦波或其他所需要的波形。
按一定的规则对各脉冲的宽度进行调制,既可改变逆变电路输出电压的大小,也可改变输出频率。
PWM控制的基本原理很早就已经提出,但是受电力电子器件发展水平的制约,在上世纪80年代以前一直未能实现。
直到进入上世纪80年代,随着全控型电力电子器件的出现和迅速发展,PWM控制技术才真正得到应用。
随着电力电子技术、微电子技术和自动控制技术的发展以及各种新的理论方法,如现代控制理论、非线性系统控制思想的应用,PWM控制技术获得了空前的发展。
到目前为止,已出现了多种PWM控制技术,根据PWM控制技术的特点,到目前为止主要有以下8类方法。
1 相电压控制P WM1.1 等脉宽PWM法[1]VVVF(Variab le Voltag e Variab le Freque ncy)装置在早期是采用PAM(PulseAmplit ude Modula tion)控制技术来实现的,其逆变器部分只能输出频率可调的方波电压而不能调压。
等脉宽PWM法正是为了克服PAM法的这个缺点发展而来的,是PWM法中最为简单的一种。
它是把每一脉冲的宽度均相等的脉冲列作为PW M波,通过改变脉冲列的周期可以调频,改变脉冲的宽度或占空比可以调压,采用适当控制方法即可使电压与频率协调变化。
相对于PAM法,该方法的优点是简化了电路结构,提高了输入端的功率因数,但同时也存在输出电压中除基波外,还包含较大的谐波分量。
什么是电流跟踪型PWM变流电路?采用滞环比较方式的电流跟踪型变流器有何特点?

什么是电流跟踪型PWM变流电路?采用滞环比较方式的电流跟踪型变流器有何特点?
电流跟踪型PWM变流电路是一种通过跟踪负载电流来控制输出电流的电路。
它通常用于要求精确控制和调节负载电流的应用,如电动机驱动、电源适配器等。
采用滞环比较方式的电流跟踪型变流器具有以下特点:
1.滞环比较方式:滞环比较方式是一种在电流跟踪型PWM
变流器中常用的控制方法。
该方式通过将参考电流与实际
负载电流进行比较,并应用滞回控制算法,调整PWM信
号的占空比,使输出电流跟踪参考电流。
2.高精度电流控制:滞环比较方式的电流跟踪型变流器具有
高精度的电流控制能力。
通过将滞环比较器设置为合适的
阈值,可以实现对输出电流的精确控制和调节。
该方式适
用于对负载电流要求较高的应用,能够实现精确的负载电
流跟踪和控制。
3.快速响应性能:采用滞环比较方式的电流跟踪型变流器具
有快速的响应速度。
由于滞环比较器能够快速调整PWM
信号的占空比,以响应负载电流的变化,因此可以实时动
态调整输出电流,并具有较好的过载能力和动态响应性能。
4.抗负载波动能力强:滞环比较方式的电流跟踪型变流器通
过及时调整PWM信号的占空比来跟踪负载电流,具有较
强的抗负载波动能力。
即使在负载电流发生变化的情况下,
也能够迅速调整输出电流,使其保持稳定。
需要注意的是,滞环比较方式的电流跟踪型变流器可能存在一些不足之处,如可能引入更多谐波成分和较高的开关频率。
因此,在应用中需要综合考虑设计需求和性能要求,选择合适的控制策略和优化方法,以实现最佳的电流跟踪和控制效果。
电流滞环跟踪PWM控制技术

电流滞环跟踪PWM控制技术摘要:电流滞环跟踪PWM(CHBPWM)控制技术的仿真所采用的器件简单,利用simulink工具分析了在电流跟踪控制中采用滞环宽度并讨论了滞环宽度与开关频率和控制精度之间的关系,给出了各波形。
关键词:电流滞环控制脉宽控制滞环宽度控制法一、前言应用PWM控制技术的变压变频器一般都是电压源型的,它可以按需要方便地控制其输出电压,为此前面两小节所述的PWM控制技术都是以输出电压近似正弦波为目标的。
但是,在电流电机中,实际需要保证的应该是正弦波电流,因为在交流电机绕组中只有通入三相平衡的正弦电流才能使合成的电磁转矩为恒定值,不含脉动分量。
因此,若能对电流实行闭环控制,以保证其正弦波形,显然将比电压开环控制能够获得更好的性能。
二、电流滞环跟踪控制原理常用的一种电流闭环控制方法是电流滞环跟踪 PWM(Current Hysteresis Band PWM ——CHBPWM)控制,具有电流滞环跟踪 PWM 控制的 PWM 变压变频器的A相控制原理如1图所示。
图1 电流滞环跟踪控制的A相原理图图中,电流控制器是带滞环的比较器,环宽为2h。
将给定电流i*a 与输出电流i a进行比较,电流偏差∆i a超过时±h,经滞环控制器HBC控制逆变器A相上(或下)桥臂的功率器件动作。
B、C二相的原理图均与此相同。
采用电流滞环跟踪控制时,变压变频器的电流波形与PWM电压波形示于图6-23。
如果,i a < i*a ,且i*a - i a ≥h,滞环控制器 HBC输出正电平,驱动上桥臂功率开关器件V1导通,变压变频器输出正电压,使增大。
当增长到与相等时,虽然,但HBC仍保持正电平输出,保持导通,使继续增大直到达到i a= i*a+ h, i a = –h,使滞环翻转,HBC输出负电平,关断V1 ,并经延时后驱动V4但此时未必能够导通,由於电机绕组的电感作用,电流不会反向,而是通过二极管续流,使受到反向钳位而不能导通。
单相逆变电路的PWM控制设计与研究
单相逆变电路的PWM控制设计与研究
一、什么是PWM控制
PWM(Pulse Width Modulation,即脉宽调制)控制是一种电路控制
方式,它可以通过改变脉冲宽度来调节电压或电流,从而控制电动机的转速、输出功率、驱动器输出功率等等。
二、PWM控制原理
基于PWM控制的单相逆变电路,经过变换后,将电压转换为交流电压
输出,由于它只需要一个单相输入电压,所以它称为单相逆变电路。
PWM
控制的单相逆变电路,由母线电压,振荡电路,反相电路和控制电路四部
分组成。
其中母线电压负责驱动整个逆变电路,振荡电路用于生成PWM信号,而反相电路则可以调整PWM信号的频率,从而影响输出电压的大小;
而控制电路则是控制整个电路的核心,它负责处理PWM信号,控制单相逆
变电路的输出功率。
三、PWM控制的设计
(1)PWM控制电路的设计
PWM控制电路的设计包括三大步骤:
(1)设计PWM信号的编码和产生部分,编码器可以通过改变脉宽来
改变输出电压,从而实现电压的控制;
(2)设计控制电路,控制电路的作用是将控制信号转换为PWM信号,从而控制电路的输出;
(3)设计反馈电路,反馈电路的目的是检测电路的输出,以便根据
实际需要调整PWM的频率,从而实现电机的控制。
脉冲宽度调制(PWM)调光法的工作原理

·常用调光方法与特 ·常见电光源的工作 ·采用IR21593的可调 ·采用UBA2021的电
原理与应用
电容以达到ZCS工作条件,这样即可进入ZVS工作方式,这是它的优点,同时EMI和功率开关管的电
应力可以明显降低,然而,如果脉冲占空比太小,以致电感电流不连续,将会失去ZVS工作特性,
并且由于供电直流电压较高,而使功率开关管上的电应力加大,这种不连续电流导通状态将导致电
2010-2-22
常用调光方法的工作原理
页码,3/6
脉冲调频调光法的局限性。
① 调光范围由调频范围决定,如果调频范围不大,则荧光灯功率调节范围也不大。
② 为了实现在低荧光灯灯功率工作条件下实现调光,则调频范围应很宽(即从25~50kHz)。由于 磁芯的工作频率范围、驱动电路、控制电路等原因都可能很限制荧光灯的调节范围。
/k-470.htm
2010-2-22
常用调光方法的工作原理
页码,5/6
应用可控硅相控工作原理,通过控制可控硅的导通角,将电网输入的正弦波电压斩掉一部分, 以降低输出电压的平均值,达到控制灯电路供电电压,从页实现调光。
可控硅相控调光对照明系统的电压调节速度快,调光精度高,调光参数可以分时段实光方法的工作原理
页码,6/6
0~wt1范围内可控硅不导通,这一范围叫做可控硅的控制角,可控硅控制角常用α表示;而在 wt1~π的相位区间可控硅导通,这一范围(见图4中的斜线部分)称为可控硅的导通角,常用φ表 示。同样在正弦交流电的负半周,对处于反向联接的另一只可控硅(相对于两个单向可控硅的反向 并联而言),在t2时刻(即相位角wt2)施加触发脉冲,使其导通。如此周而复始,对正弦波的每一 半周期控制其导通,获得相同的导通角。如果改变触发脉冲的触发时间(或相位),即改变可控硅 导通角φ(或控制角α)的大小。导通角越大电路的输出电压越高,相应灯负载的发光越亮。可 见,在可控硅调光电路中,电路输出的电压波形已经不再是正弦波了,除非调光电路工作在全导通 状态,即导通角为180°(或导通相位为π)。正是由于正弦波波形被破坏了,调光电路输出电压的 有效值发生了变化,实现了照明调光,但是由于正弦波波形被破坏,在电路中产生了许多高次谐 波,而其中只有基波电压、电流成分才做功,而高次谐波电压、电流不做功,产生了大量的无功功 率,使电源的利用率、功率因数下降,并且会由于高次谐波的引入,又会产生大量的高频谐波干 扰。所以可控硅调光法是一种较老,但又较为成熟的调光控制方法,在大功率照明调光控制应用场 合中有它的优势。
电力电子技术知识点讲义——PWM控制技术

电力电子技术知识点讲义——PWM控制技术
PWM控制定义:即脉冲宽度控制技术,它是对脉冲的宽度进行调制的技术,即通过对一系列脉冲的宽度进行调制,来等效的获得所需要的波形,其中包含波形的形状和幅值。
PWM控制的基本原理
面积等效原理
(1)冲量的定义:指窄脉冲的面积。
(2)脉冲面积等效原理:当冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同,即惯性环节的输出响应波形基本相同。
PWM脉冲等效为正弦半波
(1)正弦半波分成N等份,得到N个彼此相连的脉冲序列,该
序列脉冲为等宽度而不等幅值,即脉冲宽度均为
π/N,但脉冲幅值不等,按正弦规律变化。
(2)将上述脉冲序列采用脉冲面积等效原理进行等效:采用N个等幅值而不等宽度的矩形脉冲代替,保证矩形脉冲的中点与相应正弦半波脉冲的中点重合,且使矩形脉冲和相应正弦半波脉冲的面积(冲量)相等,这样能够保证矩形脉冲与正弦半波脉冲的作用相同。
(3)PWM波形:上述一系列等幅值而不等宽度的矩形脉冲就是PWM波形。
(4)SPWM波形:当PWM波形的脉冲宽度按正弦规律变化,与正弦波等效时,称为SPWM波形。
PWM逆变电路及其控制方法
PWM调制法
针对逆变电路:
调制信号:希望逆变电路输出的波形
载波:接受调制信号调制的信号,常见载波为等腰三角波或锯齿波
PWM波形:载波通过上述调制信号波调制后所得到的波形。
单相桥式逆变电路与PWM控制技术
异步调制和同步调制。
几种PWM调制方法
引言采样控制理论中有一个重要结论:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。
PWM控制技术就是以该结论为理论基础,对半导体开关器件的导通和关断进行控制,使输出端得到一系列幅值相等而宽度不相等的脉冲,用这些脉冲来代替正弦波或其他所需要的波形。
按一定的规则对各脉冲的宽度进行调制,既可改变逆变电路输出电压的大小,也可改变输出频率。
PWM控制的基本原理很早就已经提出,但是受电力电子器件发展水平的制约,在上世纪80 年代以前一直未能实现。
直到进入上世纪80年代,随着全控型电力电子器件的出现和迅速发展,PWM控制技术才真正得到应用。
随着电力电子技术、微电子技术和自动控制技术的发展以及各种新的理论方法,如现代控制理论、非线性系统控制思想的应用,PWM控制技术获得了空前的发展。
到目前为止,已出现了多种PWM控制技术,根据PWM控制技术的特点,到目前为止主要有以下8类方法。
1相电压控制PWM1.1等脉宽PWM法[1]VVVF(Variable Voltage Variable Frequency)装置在早期是采用PAM ( Pulse Amplitude Modulation)控制技术来实现的,其逆变器部分只能输出频率可调的方波电压而不能调压。
等脉宽PWM 法正是为了克服PAM法的这个缺点发展而来的,是PWM法中最为简单的一种。
它是把每一脉冲的宽度均相等的脉冲列作为PWM波,通过改变脉冲列的周期可以调频,改变脉冲的宽度或占空比可以调压,采用适当控制方法即可使电压与频率协调变化。
相对于PAM法,该方法的优点是简化了电路结构,提高了输入端的功率因数,但同时也存在输出电压中除基波外,还包含较大的谐波分量。
1.2随机PWM在上世纪70年代开始至上世纪80年代初,由于当时大功率晶体管主要为双极性达林顿三极管,载波频率一般不超过5kHz,电机绕组的电磁噪音及谐波造成的振动引起了人们的关注。
为求得改善,随机PWM方法应运而生。
PWM方式
PWM调制方式的谐波含量评价指标:
a)总谐波畸变系数(THD):THD表征了实际波形与其基波分量差异的
9对锯齿波、对称规则采样而
言,调制过程造成的相位滞后为
1/2个载波周期;
9对不对称规则采样而言,调制
t
过程造成的相位滞后为1/4个载
波周期;
9这种固定的相位滞后可以通过 ΔT
将参考指令波形提前相应的相位
来进行补偿;
规则采样PWM则比较容易
t
数字控制实现;
ΔT
锯齿波调制的规则采样PWM
比较锯齿波调制的规则采样和自然采样PWM方式,可以发现,二者 之间差异比较大。锯齿波调制的规则采样PWM方式一方面存在基波边带 谐波,另一方面载波边带也有些偏移。
∑ DF 2
=
1 V1
⎜⎛ ⎜⎝
∞ n=2,3
⎜⎛ ⎝
Vn n2
⎟⎞ 2 ⎠
⎟⎞1/ 2 ⎟⎠
2.单相逆变器的PWM方式
2.1自然采样PWM
自然采样PWM:是在参考信号与载波信号的交点处进行开关切 换的PWM方式。
载波有锯齿波和三角波,
1.0
t
−1.0
自然采样PWM难以用数字控制实现,因为调制波与载波交 点的求解通常需要解超越方程。
( ) vbc∗ = vbz∗ − vcz∗ = m 3Vdc cos ωot − π / 2
( ) vca∗ = vcz∗ − vaz∗ = m 3Vdc cos ωot + 5π / 6
第三课--第1章--PWM系统
(2)带制动的不可逆PWM变换器电路 带制动的不可逆PWM变换器电路 的不可逆PWM
在简单的不可逆电路中电流不能反向, 在简单的不可逆电路中电流不能反向, 因而没有制动能力。需要制动时, 因而没有制动能力。需要制动时,必须 反向电流提供通路 提供通路。 为反向电流提供通路。
13/34
二.PWM系统 .PWM系统
•工作状态与波形 工作状态与波形
在一个开关周期内: 在一个开关周期内: • 当0 ≤ t < ton时,
U, i Us Ud id 0 O ton T
电压和电流波形
Ug为正,VT导通, 为正,VT导通 导通,
Ud=Us ----回路1; ----回路 回路1 • 当ton ≤ t < T 时,
Ug为负,VT关断, 为负,VT关断 关断,
21/34
二.PWM系统 .PWM系统
轻载电动状态,一个周期分成四个阶段: 轻载电动状态,一个周期分成四个阶段:
–第1阶段,VD1续流,电流 第 阶段, 续流, –第2阶段,VT1导通,电流 第 阶段, 导通, –第3阶段,VD2续流,电流 第 阶段, 续流, –第4阶段,VT2导通,电流 第 阶段, 导通, – id 沿回路4流通; 回路4流通; id 沿回路1流通; 回路1流通; id 沿回路2流通; 回路2流通; – id 沿回路3流通。 回路3流通。
19/34
二.PWM系统 .PWM系统
输出波形
Ug VD1
VT2 VD1 VT2 VD1 VT2 VD1
t
Us
U, i
E Ud 0 O
ton T
4 3 4 3 4 3 4 c)制动状态的电压﹑电流波形
t
id
20/34
PWMN
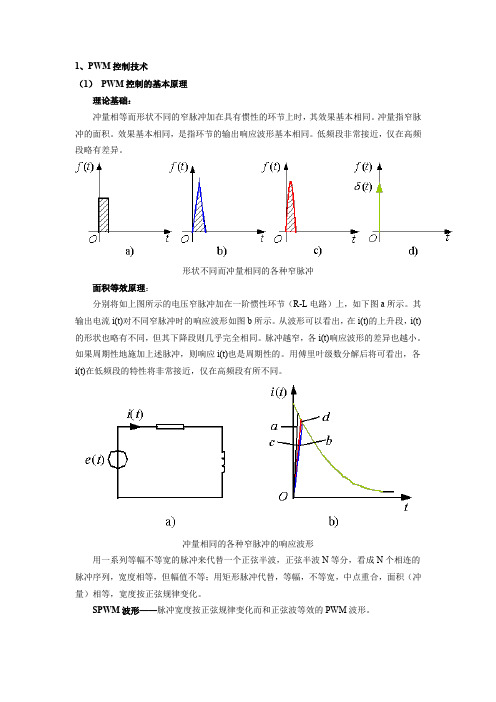
1、PWM控制技术(1)PWM控制的基本原理理论基础:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。
冲量指窄脉冲的面积。
效果基本相同,是指环节的输出响应波形基本相同。
低频段非常接近,仅在高频段略有差异。
形状不同而冲量相同的各种窄脉冲面积等效原理:分别将如上图所示的电压窄脉冲加在一阶惯性环节(R-L电路)上,如下图a所示。
其输出电流i(t)对不同窄脉冲时的响应波形如图b所示。
从波形可以看出,在i(t)的上升段,i(t)的形状也略有不同,但其下降段则几乎完全相同。
脉冲越窄,各i(t)响应波形的差异也越小。
如果周期性地施加上述脉冲,则响应i(t)也是周期性的。
用傅里叶级数分解后将可看出,各i(t)在低频段的特性将非常接近,仅在高频段有所不同。
冲量相同的各种窄脉冲的响应波形用一系列等幅不等宽的脉冲来代替一个正弦半波,正弦半波N等分,看成N个相连的脉冲序列,宽度相等,但幅值不等;用矩形脉冲代替,等幅,不等宽,中点重合,面积(冲量)相等,宽度按正弦规律变化。
SPWM波形——脉冲宽度按正弦规律变化而和正弦波等效的PWM波形。
用PWM波代替正弦半波要改变等效输出正弦波幅值,按同一比例改变各脉冲宽度即可。
等幅PWM波和不等幅PWM波:由直流电源产生的PWM波通常是等幅PWM波,如直流斩波电路及PWM逆变电路,PWM整流电路。
输入电源是交流,得到不等幅PWM波,如斩控式交流调压电路,矩阵式变频电路。
基于面积等效原理,本质是相同的。
PWM电流波:电流型逆变电路进行PWM控制,得到的就是PWM电流波。
PWM波形可等效的各种波形:直流斩波电路:等效直流波形,SPWM波:等效正弦波形还可以等效成其他所需波形,如等效所需非正弦交流波形等,其基本原理和SPWM控制相同,也基于等效面积原理。
(2)PWM逆变电路及其控制方法目前中小功率的逆变电路几乎都采用PWM技术。
逆变电路是PWM控制技术最为重要的应用场合。
峰值电流模控制中的斜坡补偿技术
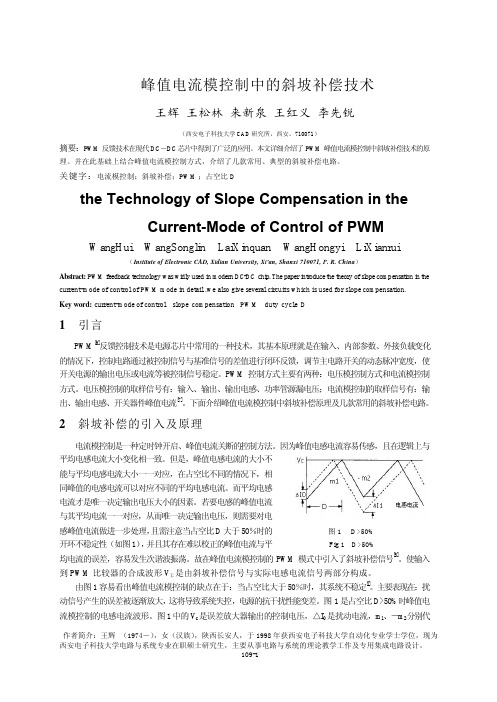
图 4 n 阶线性斜坡产生原理图 Fig 4 Functional Diagram for N Rank Linear Slope Generator
空比的增大, 斜率补偿信号的幅度也会增大, 图 5 三阶线性斜坡
Fig 5 3 Rank Linear Slope
109-3
时序图可以看到,斜坡的产生与外部时钟 同步,并随其改变[3] [4]。 3. 5 非线性斜坡产生电路 以上的几种斜坡均是由振荡器先产生 一个三角锯齿波,然后再经过电路处理而 得出补偿信号。这样所波由功率管的控制信号产生,并且其 与经过电路网络处理后的电感电流做比较
图3 线性斜坡产生电路 Fig 3 the Linear Slope Generator Circuit
109-2
坡信号加在三个晶体管的基极,随着斜坡幅 值的增加,Q1、Q2、Q3、依次导通,从而形 成三阶线性斜波(如图 5 所示)islope [3]。 3.3 带箝位的斜坡补偿电路 加斜率补偿后随着占空比的增大,实际 的电感电流峰值被降低了。这是因为随着占 从而导致峰值电流门限在主开关导通的后期 显著下降。当占空比达到 90%时,补偿信号 将电感峰值电流减小了 30%。解决途径之一 便是当发生斜坡补偿时提高控制门限电平。 但是仅仅提高门限并不是个可靠的办法,一 是误差放大器输出的控制信号会经过一个 RC 滤波网络再反馈到 PWM 比较器中,该 滤波网络的时常数一般都很大,那么门限控 制电平将无法跟上补偿斜坡的快速变化。二 是单纯的提高门限则会将斜坡补偿化为乌 有。但是,若在斜坡部分加一个箝位电路, 该箝位电路的箝位电压可以根据斜坡信号的幅度加以调 节, 进而保证在大占空比下电感峰值电流实质上不变 (如 图 6 示) 。 并且斜坡补偿信号的引入使得箝位电路的箝位 阈值随着斜坡补偿信号幅度的增减而增减,最后将其经 过处理的斜坡补偿信号箝位在 V1 和 V2 上经 ERR4 输出。 3. 4 可外同步的斜坡补偿电路 以上的斜坡产生电路均是内同步的,但在有些通信 系统应用中,系统同步是很重要的,整个系统需要在统 一的时钟下同步运行,因此需要斜坡补偿部分随外部电 路时钟进行变化。如图 7 所示可外同步的斜坡补偿电路 框图。下面介绍一下该电路中的各模块功能: 时钟检测及脉冲触发电路:检测到有时钟输入时, 将计数器预置一个数,并在每个周期内产生一个脉冲。 窗口比较器: 限定三角波的峰值在 Vref1<V<Vref2 之间。 电容 C1 :在 φ A 控制下充放电产生三角波。 计数器:外部时钟变化或三角波峰值电压 V 不在 Vref1 和 Vref2 时,触发其进行计数。当 V 低于 Vref1 时上计数,每 计一个数则打开一个电流源, 加大对 C1 的充电电流以提高 斜坡峰值; 当 V 高于 Vref2 时, 在外时钟同步下进行下计数, 每减一个数则关闭一个电流源,降低下一个时钟周期的三角波峰值;当 Vref1<V<Vref2 时,逻辑控制模块将计 数时钟屏蔽,则打开固定的电流源,此时斜坡峰值将不再变化。其整个工作过程的大概波形如图 8 所示。由
三相电压型PWM整流器PI调节器参数整定的原理和方法

三相电压源型PWM整流器PI调节器参数整定的原理和方法1引言1.1 PID调节器简介在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
目前,在工业过程控制中,95%以上的控制回路具有PID结构。
当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。
PID控制,实际中也有PI和PD控制。
PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的,其原理图如图1-1所示。
图1-1 PID控制系统原理图PID控制器传递函数常见的表达式有以下两种:(1)()ip dKG s K K ss=++,Kp代表比例增益,Ki代表积分增益,Kd代表微分增益;(2)1()p diG s K T sT s=++(也有表示成1()(1)p diG s K T sT s=++),Kp代表比例增益,Ti代表积分时间常数,Td代表微分时间常数。
这两种表达式并无本质区别,在不同的仿真软件和硬件电路中也都被广泛采用。
⏹比例(P,Proportion)控制比例控制是一种最简单的控制方式,其控制器的输出与输入误差信号成比例关系,能及时成比例地反映控制系统的偏差信号,偏差一旦产生,调节器立即产生控制作用,以减少偏差。
当仅有比例控制时系统输出存在稳态误差(Steady-state error)。
⏹积分(I,Integral)控制在积分控制中,控制器的输出与输入误差信号的积分成正比关系。
对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(System with Steady-state Error)。
为了消除稳态误差,在控制中必须引入“积分项”。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
tp (d) r 曲线
− tan b2 , K = tan a (由式(2)定义),开关周期为 T,
D 为占空比,DT 时刻上桥臂开关导通,下桥臂开
关截止,(1−D)T 时刻下桥臂开关导通,上桥臂开关 截止。
图1 Fig. 1
抛物线法原理图
Introduction of the parabola PWM control
(School of Electrical and Electronic Engineering, North China Electric Power University, Changping District, Beijing 102206, China) ABSTRACT: Firstly a parabolic pulse width modulation (PWM) current control technique was proposed, in which the current ripple was compared with a parabola to make the actual current track the reference current continually each cycle, and maintained the switching frequency to be nearly constant for a voltage-fed PWM converter in one switch period. Secondly an advanced parabolic PWM current control was proposed,whose switch period was more stable. Finally slope PWM current control was proposed and its scheme was presented, in which the current ripple slope was compared with a slope wave to make the actual current track the reference current continually each cycle, and maintained the switching frequency to be nearly constant for a voltage-fed PWM converter in one switch period. Half-bridge voltage-fed PWM converter as an example, the simulation shows the effectiveness of these methods. KEY WORDS: voltage-fed PWM converter; current control; switching frequency; quasi-constant hysteretic; slope PWM 摘要: 对用于电压型脉宽调制(pulse width modulation, PWM) 变换器的滞环法进行分析。首先提出抛物线 PWM 电流跟踪 方法,该方法将抛物线状的电流环与纹波电流(误差电流)比 较产生开关频率基本恒定的 PWM 信号,并进而提出开关频 率更稳定的改进抛物线法,最后提出斜线法,该方法将纹波 电流斜率与斜线状的电流环比较,产生开关频率基本恒定的 PWM 信号,且能在一个开关周期内使变换器电流精确跟踪 电流指令值。以半桥电压型 PWM 变换器为例,仿真验证了 上述方法的有效性。 关键词:电压型 PWM 变换器;电流控制;开关频率;恒频 滞环;斜线 PWM
文ห้องสมุดไป่ตู้标志码:A
斜线 PWM 及其派生电流跟踪方法
刘晓博,徐永海,蒋大鹏,郁祎 琳
(华北电力大学电气与电子工程学院,北京市 昌平区 102206)
Slop PWM Current Control and Corresponding Current Tracking Methods
LIU Xiaobo, XU Yonghai, JIANG Dapeng, YU Yilin
r Ia Iref a b1 p (a) 单周期桥臂电流 r r r y q p (c) 指令电流和交流电 压引起的纹波电流变化 o i r 轨迹 (b) 单周期纹波电流 Iw b2 b1−a b2+a q
Waveforms of the current ripple and
由上文分析可知,无论何种指令电流,对于纹 波,从 p 点出发,开关转换发生在 r 点处,必然经 过 q 点,则抛物线法开关周期固定如图 3 所示。
78
i Uup
S
中
国
电
机
工
程
学
报
第 31 卷
(5)中的 A 相对应。由式(5)可得
Iref Ia
L
r
Ia
a
b2 b1
tp = 0或tp = 0.5Tpab , hpab = 0
过零点为抛物线与横轴的交点。
(6)
Udown
电源或 负载
式(6)表示出了半个开关周期环宽的位置, 电流纹波
t
ua o
T
综上所述,以纹波过零点为起点作抛物线,将 该抛物线作为环宽与纹波电流比较,产生 PWM 波 形。 用上述方法求得第 n 个周期的前半周期 tp 为 tpn, 后半周期 tp 为 t pn ,如图 2 所示。该方法称为抛物 PWM 电流跟踪方法。 抛物线法具有滞环控制的优点,简单、易于实 现、 响应速度快、 稳定性好、 不需要系统参数信息, 同时具有开关频率基本恒定的特点。但由于桥臂内 阻 r、电感 L 的变化、开关死区以及过零点检测不 够准确等,使得抛物线法存在时间滞后和超前误差 问题。下面讨论改进的抛物线法。
i o Iw tp Tpab hpah tp t
图2 Fig. 2
抛物线电流控制方法 parabolic function
1 抛物线电流跟踪方法
1.1 原理解释 滞环电流跟踪法一个开关周期电流波形如 图 1(a)、(b)所示,图 1(a)中,假设参考电流为 I ref , 实际电流为 I a ,电流上升时与水平线夹角为 b1 ,下 降时与水平线夹角为 b2 , I ref 与水平线夹角为 a , 则得到纹波电流 I w = I a − I ref ,如图 1(b)所示。
(a) 半桥变换器拓扑
(b) 变换器桥臂电流波形
图4 Fig. 4
电压型 PWM 变换器及其输出电流波形
Simplified diagram of a voltage source converter and the waveform of its current output
i r 轨迹
Iw o t p T q
图3 Fig. 3
抛物线法收敛性波形分析
Convergence of the parabola PWM control
1.2
理论推导
半桥电压型 PWM 变换器如图 4(a)所示,其输 出电流波形如图 4(b)所示。假设 U up 、U down 和 ua 时 变, 但在开关周期 T 内, 电压 ua 、U up 、U down 和 U dc 不 变 , U dc =U up +U down 、 K up = tan b1 、 K down =
式(1)的确定与式(1)中 A 的确定见 2.1 节式(2) —(5)。由式(1)可得到一种新的滞环电流跟踪方法, 即抛物线法:以过零点为起始做抛物线,纹波电流 与抛物线相交则反弹(PWM 改变), 如此循环, 将纹 波电流限制在一簇抛物线内,设 hpab 为环宽,Iw 为 纹波,hpab= y 满足式(1),如图 2 所示。
0 引言
目前, 电压型脉宽调制(pulse width modulation,
基金项目: “十一” 国家科技支撑计划重大项目(2007BAA12B03)。 Key Project of the National Eleventh Five Year Research Program of China(2007BAA12B03).
76
第 31 卷 第 21 期 2011 年 7 月 25 日
中
国 电 机 工 程 学 Proceedings of the CSEE 中图分类号:TM 85
报
Vol.31 No.21 Jul.25, 2011 ©2011 Chin.Soc.for Elec.Eng. 学科分类号:470⋅40
文章编号:0258-8013 (2011) 21-0076-09
第 21 期
刘晓博等:斜线 PWM 及其派生电流跟踪方法
77
较快时,跟踪指令电流精度下降;同时文献[6]指出 由于控制时延,精度也会下降。文献[7]提出双滞环 控制,需同时计算上下两个环宽,由于上下环宽不 一致,精度下降。文献[8]所提变环法只适用于三相 三线。文献[9]提出的恒频变环法,当指令电流变化 时无效,只能用于直流输入或输出的变换器。文 献[10]提出针对三相三线的平面抛物线环法,纹波 电流限制在多个抛物线组成的平面环内,由于抛物 线环的特点,能保持开关频率基本恒定,但不同频 率的指令电流对应不同的抛物线环,该方法不适用 于包含多种频率的指令电流,且其控制方法过于复 杂,会产生较大时延。 本文在详细分析滞环法原理的基础上,提出基 于抛物线原理的抛物线法,在此基础上又提出误差 收敛的电流跟踪方法、改进抛物线法和斜线法。其 中斜线法原理为:电流纹波信号的斜率与该斜线信 号比较,产生 PWM 控制信号。其它方法与斜线法 原理类 似。 这些方 法都 能在一 个开 关周期 内使 PWM 变换器输出电流精确跟踪电流指令值,具有 电路简单和开关频率基本恒定以及动态响应性能 好等优点。
图 1(b)中, 纹波电流 Iw 上升时与水平线夹角为 b1 − a ,下降时与水平线夹角为 b1 + a ,假设 b1 、 b2 不变。I ref 的变化使得每个开关周期Δrpq 发生变化, 如图 1(c)所示为多个开关周期Δrpq 的形状,当 a 增 大时, ∠rpq 减小 ∠rqp 增大,顶点 r 按照某种曲线 顺时针转动。如图 1(d)所示,设 T 为滞环法开关周 JJG 期, pq = T = 0.5Tpab 不变,以 p 点为原点,建立直 角坐标系,r 点坐标(tp,y)满足: y = Atp(0.5Tpab − tp) (1)