5800曲线道路全线坐标正反算(已验证)
卡西欧5800程序坐标正反算[1]
![卡西欧5800程序坐标正反算[1]](https://img.taocdn.com/s3/m/5459ba14a216147917112868.png)
卡西欧5800程序坐标正反算修改 ZX-WN (其他的程序不用改,所有程序输完后退出进行扩展变量:5→Dimz 按EXE出现Done就OK了)WN(子程序不运行)" ZS=1,FS=2 "?N: 1÷P →C:(P-R)÷(2HPR)→D:180÷π→E: If N=1: Then Goto 1: Else Goto 2: IfEnd← ┚LbI 1:1 →I:0 →Z : Abs(K- O) →W: Prog " ZS "← ┚F-90→F← ┚" JJ " ?K: " PJ " ?L: " ZX= ":X+Lcos(F+K) →Z[3] ◢" ZY= ": Y+Lsin(F+K) →Z[4] ◢" QXFWJ= ":F DMS ◢Abs(Z) →Z:Goto 8← ┚LbI 2: " X " ?I: " Y " ?J: Prog " FS " : " FSZH= " : O+W→K ◢" FSJL= ":Z ◢Lbl 8正算子程序( ZS )(不运行)1÷P→C:(P-R)÷(2HPR) →D: 180÷π→E← ┚0.1739274226→A :0.3260725774→B :0.0694318442→K :0.3300094782→L : 1-L→F : 1-K→M : U+W ( Acos ( G+QEKW ( C+KWD ))+Bcos ( G+QELW ( C+LWD )) +Bcos ( G+QEFW ( C+FWD )) +Acos ( G+QEMW ( C+MWD )))→X : V+W ( Asin ( G+QEKW ( C+KWD )) +Bsin ( G+QELW ( C+LWD )) +Bsin ( G+QEFW ( C+FWD )) +Asin ( G+QEMW ( C+MWD )))→Y : G+QEW ( C+WD )+90→F :X+ZcosF→X :Y+ZsinF→Y3 反算子程序( FS )(不运行)G-90→T : Abs (( Y-V )) cos ( T ) - ( X-U ) sin ( T )→W :0→Z← ┚Lbl 0← ┚prog " ZS ": T+QEW ( C+WD )→L :( J-Y ) cosL- ( I-X )sinL→Z :If Abs(Z) < 0.001: Then Goto1 :Else W+Z→W :IfEnd :Goto 0← ┚ Lbl 1 :0→Z : Prog " ZS ":( J-Y )÷sinF→ZZX-WN主程序(运行主程序是一个数据库),该程序适用于匝道,对全段完整非对称曲线计算太过麻烦)" CZX " ?S( 仪站 X 坐标 ): " CZY " ?W (仪站 Y 坐标)LbI 0: " K "?K: If K≤126.9 (第 1 条单一曲线的终点下面同上) : Then Goto A :Else If K≤176.9 And K >126.9: Then Goto B:Else If K≤259.562 And K >176.9: Then Goto C:Else If K≤309.562 And K > 259.562: Then Goto D :IfEnd:IfEnd:IfEnd:IfEnd← ┚LbI A:92094.336 (起点 X 坐标)→U:8287.962 (起点 Y 坐标)→V:0 起点桩号→O:145°11 ' 54 "(方位角)→G:126.9 (曲线长度)→H:10^(45) (起点半径)→P:10^(45) (止点半径)→R:+1 (路线左右偏,左负右正,直线输 0 )→Q:Prog " WN " :Goto WLbI B:91990.134→U:8360.388→V:126.9→O:145°11 ' 54 "→G:50→H:10^(45) →P:150 →R:+1→Q:Prog " WN " :Goto WLbI C:91947.609→U:8386.570→V:176.9→O:154°44 ' 51 "→G:82.662→H:150 →P:150 →R:+1→Q:Prog " WN " :Goto WLbI D:91867.101→U:8399.992→V:259.562→O:186°19 ' 19 "→G:50→H:150 →P: 10^(45) →R:+1→Q:Prog " WN " :Goto WLbI W: " PJ1 "?T← ┚ (该项是只左右边桩再左右偏距,输 0 为不再左右偏,可以直接出方位角、距离,适用于桥梁桥台、盖梁、涵洞八字墙等放样,以路线前进方向,前 - ,后 + )If T=0 :Then Z[3]→Z: Z[4]→M: Goto P: Else Goto V: IfEnd← ┚LbI V: " JJ1 "? O← ┚ (左右边桩再偏夹角,用180° 减去路线夹角)" X1= " : Z[3]+Tcos ( F+N+ O )→U ◢" Y1= " :Z[4]+Tsin ( F+N+ O )→V ◢U→Z: V→M: GotoP← ┚LbI P:Pol(Z-S,M-W): If J≤0 :Then J+360°→J: IfEnd← ┚" JL= ":I ◢ (仪站至测点的距离)" FWJ= ":J DMS ◢ (仪站至测点的方位角)Goto01.规定以道路中线前进方向(即里程增大的方向)区分左右;当线元往左偏时Q=-1 ;当元线往右偏时, Q=1 :当元线为直线时,Q=0 °2.当所求点位于中线时, Z=0 ;当位于中线左侧时, Z 取负值:当位于中线右侧时, Z 取正值°当线元为直线时,其起点、止点的曲率半径为无穷大,以 10 的 45 次方代替°3.当线元为圆曲线时,无论其起点、止点与什么线元相接,其曲率半径均等于圆弧的半径°4.当线元为完整的缓和曲线时,起点与直线相接时,曲率半径为无穷大,以 10 的 45 次方代替°与圆曲线相接时,曲率半径等于圆曲线的半径,止点跟直线相接时,曲率半径为无穷大,以 10 的 45 次方代替;与圆曲线相接时,曲率半径等于圆曲线的半径°5.当线元为非完整缓和曲线时,起点与直线相接时,曲率半径等于设计规定的值;与圆曲线衔接时,曲率半径等于圆曲线的半径°止点与直线相接时,曲率半径等于设计规定的值;与圆曲线衔接时,曲率半径等于圆曲线的半径°二、输入与显示说明1. 输入部分:2. . 输入3. ZS=1 , FS=2 ,选择计算方式,输入 1 正算;输入 2 反算4. 数据库的输入5. U ?线元起点的 X 坐标6. V ?线元起点的 Y 坐标7. O ?线元起点的里程8. G ?线元的起点切点方位角9. H ?线元的长度10. P ?线元起点的曲率的半径11. R ?线元止点的曲率的半径 .12. ZY ?线元左右偏标志(左偏 Q=-1 ,右偏 Q=1 ,直线段 Q=0 )13. 计算时:14. K ?正算时所求的里程15. JJ ?夹角,(正交90 °,斜交直接输角度)16. PJ ?偏距(左负右正)17. . 结果18. ZX= 正算时,计算得出的测点的 X 坐标19. ZY= 正算时,计算得出的测点的 Y 坐标20. QXFWJ= 正算时,测点对应中线点的切线方位角21. PJ1? :左右桩号再偏距离,不需要时输 022. JJ1? : 左右边桩再偏角度23. JL= 仪站与测点的距离24. FWJ= 仪站与测点的方位角25. 反算时输入:26. X ?反算时所求点的 X 坐标27. Y ?反算时所求点的 Y 坐标28. 结果29. FSZH= 反算时,计算得出的所求点的里程30. FSJL= 反算时,计算得出的所求点的边距(负为左偏,正为右偏)出售 5800 计算器带主线正反算(正交 / 斜交),匝道全段正反算,全段高程(超高、加宽)中边桩出售 5800 计算器带程序1 、全路段主线坐标正反算(正交 / 斜交)2 、匝道全段坐标正反算(正交 / 斜交 )3 、全路段中边桩高程(带超高)有电子版的范例,初学者包教会,使用简单,快捷 . 让你短时间成为一个熟练的测量者。
CASIO5800坐标正反算计算程序

CASIO5800坐标正反算计算程序CASIO 9860/5800坐标正反算计算程序1. 坐标正算主程序(命名为ZBZS)第1行:Lbl 0:”K=”?K:”BIAN=”? Z:”α=”?B第2行:Prog “A”第3行:”X=”:N+Zcos(F+B)◢第4行:”Y=”:E+Zsin(F+B)◢第5行:”F=”:F◢第6行:Goto 0K——计算点的里程BIAN——计算点到中桩的距离(左负右正)α——取前右夹角为正2. 坐标反算桩号和偏距主程序(命名为ZBFS)第1行:”X1=”? C:”Y1=”?D: ”K1=”?K第2行:Lbl 0:Prog “A”第3行:Pol(C-N,D-E)第4行:List Ans[1]→I第5行:List Ans[2]→J第6行:Icos(F-J)→S:K+S→K第7行:Abs(S)>0.0001=>Goto 0第8行:”K1=”:K◢第9行:”BIAN=”:Isin(J-F)→Z◢X1——取样点的X坐标Y1——取样点的Y坐标K1——输入时为计算起始点(在线路内即可),输出时为反算点的桩号Z——偏距(左负右正)3. 计算坐标子程序(命名为XYF)为了简洁,本程序由数据库直接调用,上述中的正反算主程序不直接调用此程序第1行:K-A→S:(Q-P)÷L→I第2行:N+∫(cos(F+X(2P+XI)×90÷π),0,S)→N第3行:E+∫(sin(F+X(2P+XI)×90÷π),0,S)→E第4行:F+S(2P+SI)×90÷π→F4. 数据库(命名为A)第1行:K≤175.191=>Stop第2行:175.191→A:428513.730→N:557954.037→E:92°26′40″→F:0→P:1/ 240→Q:70.417→L:K≤A+L =>GoTo 1(第一缓和曲线,圆半径为240)第3行:245.607→A: 428507.298→N:558024.092→E: 100°50′59.4″→F: 1/240→P:1/240→Q:72.915→L: K≤A+L =>Goto 1(第圆曲线,半径为240)第4行:318.522→A: 428482.988→N:558092.538→E: 118°15′25.2″→F: 1/240→P: 0→Q: 55.104→L: K≤A+L =>Goto 1(第二缓和曲线,圆半径为240)第5行:373.627→A:428453.283→N:558138.912→E:124°50′4.5″→F:0→P:-1/180→Q:67.222→L:K≤A+L=>Goto 1:Stop(第一缓和曲线,圆半径为180)第6行:Lbl 1:Prog “XYF”A——曲线段起点的里程N——曲线段起点的x坐标E——曲线段起点的y坐标F——曲线段起点的坐标方位角P——曲线段起点的曲率(左负右正)Q——曲线段终点的曲率(左负右正)L——曲线段长度(尽量使用长度,为计算断链方便)说明:(1)在9860中,程序中所有公式和部分函数结果均存储在ListAns列表数组中,要想多次调用最好随公式取出结果,并赋给变量。
5800P公路路线坐标正反算及高程计算程序
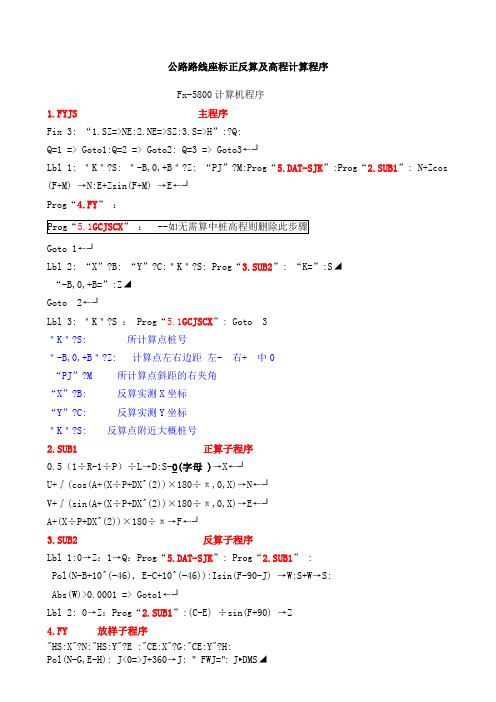
公路路线座标正反算及高程计算程序Fx-5800计算机程序1.FYJS 主程序Fix 3: “1.SZ=>NE:2.NE=>SZ:3.S=>H”:?Q:Q=1 => Goto1:Q=2 => Goto2: Q=3 => Goto3←┘Lbl 1: "K"?S: "-B,0,+B"?Z: “PJ”?M:Prog“5.DAT-SJK”:Prog“2.SUB1”: N+Zcos (F+M) →N:E+Zsin(F+M) →E←┘Prog“4.FY”:Goto 1←┘Lbl 2: “X”?B: “Y”?C:"K"?S: Pro g“3.SUB2”: “K=”:S◢“-B,0,+B=”:Z◢Goto 2←┘Lbl 3: "K"?S :Prog“5.1GCJSCX”: Goto 3"K"?S: 所计算点桩号"-B,0,+B"?Z: 计算点左右边距左- 右+ 中0“PJ”?M 所计算点斜距的右夹角“X”?B: 反算实测X坐标“Y”?C:反算实测Y坐标"K"?S: 反算点附近大概桩号2.SUB1 正算子程序0.5(1÷R-1÷P)÷L→D:S-O(字母 )→X←┘U+∫(cos(A+(X÷P+DX^(2))×180÷π,0,X)→N←┘V+∫(sin(A+(X÷P+DX^(2))×180÷π,0,X)→E←┘A+(X÷P+DX^(2))×180÷π→F←┘3.SUB2 反算子程序Lbl 1:0→Z:1→Q:Prog“5.DAT-SJK”: Prog“2.SUB1” :Pol(N-B+10^(-46), E-C+10^(-46)):Isin(F-90-J) →W:S+W→S:Abs(W)>0.0001 => Goto1←┘Lbl 2: 0→Z:Prog“2.SUB1”:(C-E) ÷sin(F+90) →Z4.FY 放样子程序"HS:X"?N:"HS:Y"?E :"CE:X"?G:"CE:Y"?H:Pol(N-G,E-H): J<0=>J+360→J: " FWJ=": J►DMS◢"JL=": I◢"HS:X"?N: 后视点(计算点)X坐标"HS:Y"?E : 后视点(计算点)Y坐标"CE:X"?G: 测站点X坐标"CE:Y"?H: 测站点Y坐标5.1高程计算子程序(5.1GCJSCX)Prog“ 6.SQX-DAT”:Z[6] Abs(Z[2]- Z[1]) ÷2→Z[3]:if Z[2]- Z[1]>θ :Then 1→Z[4]:Else -1→Z[4]:ifendif S<K:Then - Z[1]→T:Else Z[2]→T:ifendAbs (K-S)→Z[5]if Z[5]- Z[3]>θ:Then Z[7]+T Z[5]→Z[8]:“HS=”:Z[8]◢Else Z[7]+T Z[5]+ Z[4] (Z[3]- Z[5])2÷2÷Z[6]→Z[8]: “HS=”:Z[8]◢ifend5.DAT-SJK 数据库子程序Goto1←┘同时保存多个曲线时的指针Lbl 1←┘IF S<476533.296(线元终点里程):Then31°24'29.07″→A(线元起点方位角):476088→O(线元起点里程):4689534.997→U(线元起点X):479874.003→V(线元起点Y):1045→P(线元起点曲率半径):1045→R(线元终点曲率半径):445.296→L(线元起点至终点长度): R eturn:IfEnd←┘IF S<476803.296:Then31°45'48.37″→A:476533.296→O:4689913.601→U:480108.413→V:1045→P:12000→R: 270→L: Return:IfEnd←┘IF S<477106.771:Then32°24'28.85→A:476803.296→O:4690142.627→U:480251.404→V:12000→P:12000→R: 303.475→L: Return:IfEnd←┘IF S<477376.771:Then33°51'25.2″→A:477106.771→O:4690396.754→U:480417.272→V:12000→P:1045→R: 270→L: Return:IfEnd←┘IF S<488923.776:Then34°30'05.68→A:477376.771→O:4690619.834→U:480569.372→V:1045→P:1045→R: 11547.005→L: Return:IfEnd←┘IF S<489353.776:Then34°30'05.68″→A:488923.776→O:4700135.844→U:487109.930→V:1045→P:-10000→R:430→L: Return:IfEnd←┘IF S<490817.499:Then33°16'10.99″→A:489353.776→O:4700491.941→U:487350.944→V:-1000 0→P:-10000→R: 1463.723→L: Return:IfEnd←┘IF S<491247.499:Then24°52'59.52″→A:490817.499→O:4701770.051→U:488061.643→V:-1000 0→P:-1045→R: 430→L: Return:IfEnd←┘IF S<509336.037:Then23°39'04.83″→A:491247.499→O:4702162.678→U:488236.961→V:-1045→P:-1045→R: 18088.538→L: Return:IfEnd←┘程序名:(6.SQX-DAT)(高程竖曲线要素子程序)if S<332.599:Then 0.02793→Z[1]:-0.03309→Z[2]:1800→Z[6]:235→K:32.7→Z[7]: goto 1:ifendif S <734.085:Then -0.03309→Z[1]:-0.00485→Z[2]:6000→Z[6]:460→K:25.254→Z[7]: goto 1:ifend-- Lbl 1Z[1]—前坡: Z[2]—后坡: Z[6]—竖曲线半径 K—变坡点桩号: Z[7]—变坡点设计高三、使用说明1、规定(1) 以道路中线的前进方向(即里程增大的方向)区分左右;当曲线半径在左时,P、R取负值,当曲线半径在右时,P、R取正值,当曲线半径为无穷大(即直线)时,P、R以10的45次代替。
非常好的5800坐标正反算程序
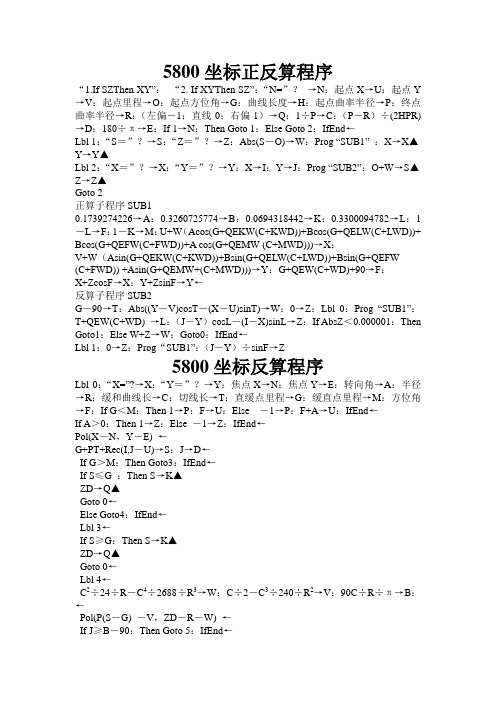
5800坐标正反算程序“1.If SZThen XY”:“2. If XYThen SZ”:“N=”?→N:起点X→U:起点Y →V:起点里程→O:起点方位角→G:曲线长度→H:起点曲率半径→P:终点曲率半径→R:(左偏-1;直线0;右偏1)→Q:1÷P→C:(P-R)÷(2HPR)→D:180÷π→E:If 1→N:Then Goto 1:Else Goto 2:IfEnd←Lbl 1:“S=”?→S:“Z=”?→Z:Abs(S-O)→W:Prog “SUB1”:X→X▲Y→Y▲Lbl 2:“X=”?→X:“Y=”?→Y:X→I:Y→J:Prog “SUB2”:O+W→S▲Z→Z▲Goto 2正算子程序SUB10.1739274226→A:0.3260725774→B:0.0694318442→K:0.3300094782→L:1-L→F:1-K→M:U+W(Acos(G+QEKW(C+KWD))+Bcos(G+QELW(C+LWD))+ Bcos(G+QEFW(C+FWD))+A cos(G+QEMW (C+MWD)))→X:V+W(Asin(G+QEKW(C+KWD))+Bsin(G+QELW(C+LWD))+Bsin(G+QEFW(C+FWD)) +Asin(G+QEMW+(C+MWD)))→Y:G+QEW(C+WD)+90→F:X+ZcosF→X:Y+ZsinF→Y←反算子程序SUB2G-90→T:Abs((Y-V)cosT-(X-U)sinT)→W:0→Z:Lbl 0:Prog “SUB1”:T+QEW(C+WD) →L:(J-Y)cosL-(I-X)sinL→Z:If AbsZ<0.000001:Then Goto1:Else W+Z→W:Goto0:IfEnd←Lbl 1:0→Z:Prog“SUB1”:(J-Y)÷sinF→Z5800坐标反算程序Lbl 0:“X=”?→X:“Y=”?→Y:焦点X→N:焦点Y→E:转向角→A:半径→R:缓和曲线长→C:切线长→T:直缓点里程→G:缓直点里程→M:方位角→F:If G<M:Then 1→P:F→U:Else -1→P:F+A→U:IfEnd←If A>0:Then 1→Z:Else -1→Z:IfEnd←Pol(X-N,Y-E) ←G+PT+Rec(I,J-U)→S:J→D←If G>M:Then Goto3:IfEnd←If S≤G :Then S→K▲ZD→Q▲Goto 0←Else Goto4:IfEnd←Lbl 3←If S≥G:Then S→K▲ZD→Q▲Goto 0←Lbl 4←C2÷24÷R-C4÷2688÷R3→W:C÷2-C3÷240÷R2→V:90C÷R÷π→B:←Pol(P(S-G) -V,ZD-R-W) ←If J≥B-90:Then Goto 5:IfEnd←P(S-G)+P(S-G)5÷40÷R2÷C2→Z←Z3÷(6RC) →H←If A>0:Then D-H→W:Else -D-H→ W:IfEnd←If RC≤2WC:Then RC÷W→Z:Else(RC-√(R2C2-2RCWZ)) ÷W→Z:IfEnd←G+PZ→K▲K-PZ5÷(40R2C2) →V:Z3÷(6RC) →H←If A<0:Then -1→Z:Else 1→Z:IfEnd←√((S-V)2+(ZD-H)2) →W←If ZD≥H:Then W→Q▲Else -W→Q▲IfEnd←Goto 0←Lbl 5←(90+J)π÷180-C÷2R→J←If RJ≥P(M-G) -2C:Then Goto 6:IfEnd←G+P(C+JR) →K▲R-I→Q▲Goto 0←Lbl 6←Pol(P(S-G) -T,ZD) ←M-P(T-Rec(I,J-AbsA)) →O←If G>M:Then Goto 7:IfEnd←If O>M:Then O→K▲J→O▲Goto 0←Else Goto 8:IfEnd←Lbl 7←If O≤M:Then O→K▲J→Q▲IfEnd←Goto 0←Lbl 8←P(M-O)+P(M-O)5÷(40R2C2) →Z←Z3÷(6RC)) →H←J-H→W←If RC≤2WZ:Then RC÷W→Z:Else(RC-√(R2C2-2RCWZ)) ÷W→Z:IfEnd ←M-PZ→K▲K+PZ5÷(40R2C2) →V:Z3÷(6RC) →H:√((O-V)2+(J-H)2)→W←If J≥H:Then W→Q▲Else -W→QIfEnd←Goto 0←。
5800交点正反算坐标(可计算不对称缓和曲线)
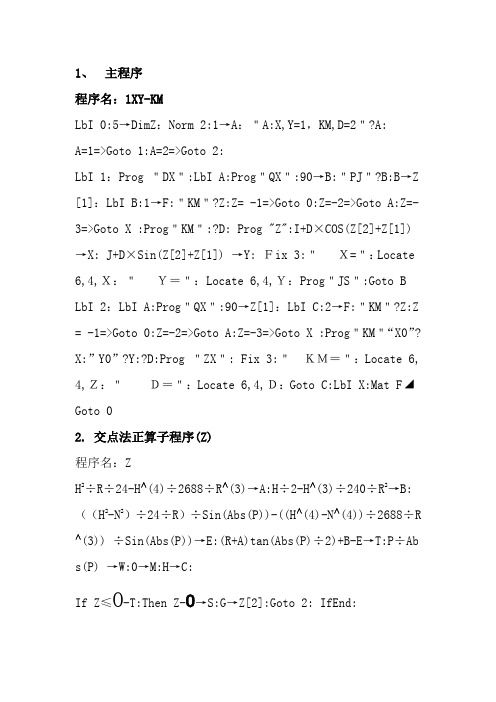
1、主程序程序名:1XY-KMLbI 0:5→DimZ:Norm 2:1→A:"A:X,Y=1,KM,D=2"?A:A=1=>Goto 1:A=2=>Goto 2:LbI 1:Prog "DX":LbI A:Prog"QX":90→B:"PJ"?B:B→Z [1]:LbI B:1→F:"KM"?Z:Z= -1=>Goto 0:Z=-2=>Goto A:Z=-3=>Goto X :Prog"KM":?D: Prog "Z":I+D×COS(Z[2]+Z[1]) →X: J+D×Sin(Z[2]+Z[1]) →Y: Fix 3:"X=":Locate 6,4,X:"Y=":Locate 6,4,Y:Prog"JS":Goto B LbI 2:LbI A:Prog"QX":90→Z[1]:LbI C:2→F:"KM"?Z:Z = -1=>Goto 0:Z=-2=>Goto A:Z=-3=>Goto X :Prog"KM"“X0”? X:”Y0”?Y:?D:Prog "ZX": Fix 3:"KM=":Locate 6, 4,Z:"D=":Locate 6,4,D:Goto C:LbI X:Mat F◢Goto 02. 交点法正算子程序(Z)程序名:ZH2÷R÷24-H∧(4)÷2688÷R∧(3)→A:H÷2-H∧(3)÷240÷R2→B:((H2-N2)÷24÷R)÷Sin(Abs(P))-((H∧(4)-N∧(4))÷2688÷R ∧(3)) ÷Sin(Abs(P))→E:(R+A)tan(Abs(P)÷2)+B-E→T:P÷Ab s(P) →W:0→M:H→C:If Z≤O-T:Then Z-O→S:G→Z[2]:Goto 2: IfEnd:If Z≤O-T+H:Then Z-O+T→S:Prog “HX”:G+WK→Z[2]:Goto 4:IfEnd:If Z≤O-T+ΠR×Abs(P)÷180+H÷2-N÷2: Then 180(Z-O+T-0. 5H) ÷R÷Π→S : A+R(1-Cos(S))→B:H÷2-H∧(3) ÷240÷R2+Rsin(S)→A:R→M:G+WS→Z[2]:Goto 4: IfEnd:O-T+ΠR×Abs(P)÷180+H÷2+N÷2-Z→S:(R+N2÷R÷24-N∧(4)÷2688÷R∧(3))tan(Abs(P) ÷2)+N÷2-N∧(3) ÷240÷R2+E→T :N→H:Prog “HX”:G+P→S:S-WK→Z[2]:U+(T-A)Cos(S)-WBSi n(S)→I:V+(T-A)Sin(S)+WBcos(S)→J:Goto 3:LbI 4:U+(A-T)cos(G)-WBsin(G)→I:V+(A-T)Sin(G)+WBcos(G) →J: Goto 3:LbI 2:U+Scos(Z[2])→I:V+Ssin(Z[2]) →J: LbI 3:C→H3. 交点法缓和段转化子程序(HX)程序名:HXS-S∧(5) ÷40÷R2÷H2+S∧(9) ÷3456÷R∧(4) ÷H∧(4)→A:S∧(3)÷6÷R÷H-S∧(7) ÷336÷R∧(3) ÷H∧(3)+S∧(11) ÷42240÷R ∧(5) ÷H∧(5)→B:90S2÷Π÷R÷H→K:RH÷S→M4. 交点法反算子程序(ZX)程序名:ZXZ:0→D:LbI 0:Prog “Z”:Pol(X-I,Y-J):J-Z[2] →J:Isin(J) →S:Icos(J) →I:If Abs(I)<0.1:Then Z+I→Z:S→D:Goto 2:Else Goto 1: LbI 1:If M=0:Then Z+I→Z:Goto 0:Eles Pol(M-WS,I):(JMΠ)/180→I:Z+I→Z:Goto 0:IfEndLbI 25.线路选择子程序(线路选择输0时。
卡西欧5800公路坐标正反算程序
卡西欧5800公路坐标正反算程序卡西欧5800公路坐标正反算程序是一种用于测量和计算公路坐标的工具。
它基于卡西欧5800全站仪的技术和功能,能够准确地测量和计算公路的坐标信息。
下面我将详细介绍卡西欧5800公路坐标正反算程序的工作原理和使用方法。
一、工作原理:卡西欧5800全站仪是一种高精度的测量仪器,它能够通过测量角度和距离来确定地点的坐标。
在公路测量中,我们通常会在公路上设置一系列的控制点,然后使用全站仪测量这些控制点的坐标。
通过这些测量数据,我们可以计算出公路上其他点的坐标。
卡西欧5800公路坐标正反算程序基于这些测量数据,通过一系列的计算和算法,能够准确地计算出公路上其他点的坐标。
具体的计算方法包括正算和反算。
正算是指已知控制点的坐标,通过测量数据和算法计算出其他点的坐标。
反算是指已知某个点的坐标,通过测量数据和算法计算出该点在公路上的位置。
二、使用方法:1. 设置控制点:首先,在公路上选择一些具有代表性的控制点,并使用全站仪进行测量。
在测量过程中,需要确保全站仪的水平和垂直仪器准确,以获得准确的测量数据。
2. 导入测量数据:将测量数据导入卡西欧5800公路坐标正反算程序。
该程序通常会提供一个界面,用于导入和管理测量数据。
3. 正算:如果需要计算公路上其他点的坐标,可以选择正算功能。
在正算功能中,需要输入已知控制点的坐标和测量数据。
程序将根据这些数据进行计算,并给出其他点的坐标。
4. 反算:如果需要计算某个点在公路上的位置,可以选择反算功能。
在反算功能中,需要输入已知点的坐标和测量数据。
程序将根据这些数据进行计算,并给出该点在公路上的位置。
5. 结果输出:计算完成后,卡西欧5800公路坐标正反算程序将给出计算结果。
结果通常以表格或图形的形式呈现,以便用户查看和使用。
三、注意事项:1. 测量准确性:为了获得准确的测量结果,使用卡西欧5800全站仪时需要注意测量准确性。
在测量过程中,需要保持仪器的稳定和准确,并避免测量误差。
卡西欧5800计算器坐标正反算程序
卡西欧5800计算器坐标正反算程序讲你个讲3位粉丝1楼主程序坐标正反算程序名称:ZBZFSLb1 A↙30→Dim Z :"0=ZS,1=FS"?Z ↙If Z=0:Then Goto B:IfEnd↙ (Z=0进入里程点坐标正算)If Z=1:Then Prog"FSLCZ "↙ (Z=1进入反算里程边桩)Lb1 B ↙Prog”ZBZS” ↙子程序反算里程桩名称:FSLCZLb1 1↙"XK="?X:"YK="?Y↙(输入任意测点的X、Y坐标)“K=”?K ↙(试算里程,任意输入标段内里程点即可,也可以输入大致的估算里程加快速度)Lb1 2↙Prog"SJK ":T-90 →W:W<0=>360+W→W:Abs((Y-Z[19])*Cos(W)-(X-Z[18]) *Sin(W))→S↙If S<0.0001:Then Goto 4:Else Goto 3:Ifend↙Lb1 3↙K+S→K: Prog"SJK":T-90 →W:W<0=>360+W→W:Abs((Y-Z[19])*Cos W-(X-Z[18])*Sin (W)→Q↙If Q<0.0001 :Then Q→S: Goto 4:Else if Q<S: Then K+Q→K: Goto 2 :Else if Q>S :Then K-Q→K:Goto 2:Ifend:Ifend:Ifend ↙Lb1 4↙Pol (X-Z[18],Y-Z[19]:"DP(-Z+Y)=":I◢(偏距)"K=":K+S→K◢(里程)Goto 1↙子程序坐标正算名称:ZBZSLb1 0 ↙“XHS="?G(后视点X):"YHS="?L(后视点Y):"XZJ="?M(置镜点X):"YZJ="?N (置镜点Y):Pol(G-M,L-N):"DH=":I(后视距)◢J<0=>J+360→J:"FH=":JDMS ◢(后视方位角)Lb1 1↙“K=”?K :(输入所需计算里程)Prog"SJK "↙XI : Z[18]↙YI: Z[19] ↙Pol(Z[18]-M,Z[19]-N): J<0=>J+360→J↙“PJ=”?P↙ (输入桩与线路夹角)“PD=”?D↙ (输入桩距中线的距离)Z[18]+D*Cos(T+P) →Z[20] ↙Z[19]+D*Sin(T+P) →Z[21] ↙“X=”: Z[20] ◢ (放样坐标X)“Y=”: Z[21] ◢ (放样坐标Y)Pol(Z[20]-M,Z[21]-N):"D=":I◢(放样距)J<0=>J+360→J:"F=":JDMS◢(放样方位角)Goto 1↙子程序数据库名称:SJKif K<本段曲线终点里程And K≥上段曲线终点里程:Then 本段曲线终点里程→Z[1] : 上段曲线终点里程(第一段曲线输起点的里程)→Z[2] :1→O (注:左偏曲线输入-1→O,右偏曲线输入1→O): 半径→R :曲线偏角→A:第一缓和曲线→Z[6] : 第二缓和曲线→Z[7] : 交点X→B :交点Y→C : 小里程向交点方位角→E : 交点向大里程方位角→F : Pr og”JSPB”:Return: Ifend↙if…………Prog”JSPB”:Return:Ifend(曲线段分段输入)↙补充直线段输入如下 (只需输线路的最后一段直线数据)if K<本段直线终点里程And K≥本段直线起点里程:Then 本段直线终点里程→Z[3]:终点X→Z[16]:终点Y→Z[17]:方位角→E: Z[16]+ (K- Z [3])*Cos(E)→Z[18]:Z[17]+ (K- Z[3])*Sin(E)→Z[19] : Return:Ifend ↙子程序计算判别名称:JSPBLb1 2 ↙(曲线要素计算)Z[6]/2- Z[6]^3/(240*R^2)+ Z[6]^5/(34560*R^4) →Z[8] ↙ (M1)Z[7]/2- Z[7]^3/(240*R^2)+ Z[7]^5/(34560*R^4) →Z[9] ↙ (M2)Z[6]^2/(24*R)- Z[6]^4/(2688*R^3) →Z[10] ↙ (P1)Z[7]^2/(24*R)- Z[7]^4/(2688*R^3) →Z[11] ↙ (P2)2009-12-31 20:08回复2楼π*A*R/180+0.5*( Z[6]+ Z[7])→Z[25] ↙ (曲线总长)90* Z[6]/(R*π) →Z[14] ↙ (第一缓和曲线总偏角)讲你个讲3位粉丝90* Z[7]/(R*π) →Z[15] ↙(第二缓和曲线总偏角,可以省略)Z[8]+(R+Z[10])Tan(A/2)-(Z[10]-Z[11] )/Sin( A)→Z[12]↙ (切线T1)Z[9]+(R+Z[11])Tan(A/2)+(Z[10]-Z[11] )/Sin (A)→Z[13]↙ (切线T2)B+ Z[12]*Cos (E+180)→ Z[16] ↙ (ZH点X)C+ Z[12]*Sin(E+180)→ Z[17] ↙ (ZH点Y)Z[1]- Z[25]→Z[3] ↙ (ZH点里程)Z[3]+ Z[6]→Z[4] ↙ (HY点里程)Z[1]- Z[7]→Z[5] ↙ (YH点里程)Goto 3 ↙LB1 3 ↙(判断里程点与曲线关系)if K≤Z[3] And K> Z[2] : Then Goto 4 : Ifend ↙if K≤Z[4] And K> Z[3] : Then Goto 5 : Ifend ↙if K≤Z[5] And K> Z[4] : Then Goto 6 : Ifend ↙if K≤Z[1] And K> Z[5] : Then Goto 7 : Ifend ↙Lb1 4 ↙(里程小于直缓点直线独立坐标)K- Z[3] →Z[23] : 0→Z[24] : E→T: Goto 8↙Lb1 5 ↙(第一缓和曲线独立坐标)K- Z[3] →H ↙H-H^5/(40*R^2* Z[6]^2)+H^9/(3456*R^4* Z[6]^4) →Z[23] ↙H^3/(6*R* Z[6])-H^7/(336*R^3* Z[6]^3) →Z[24] ↙90*H^2/( R*π* Z[6]) →T ↙if O>0 :Then T +E→T : Eles E-T →T : T<0=>360+T→T : Ifend ↙Goto 8 ↙Lb1 6 ↙(圆曲线独立坐标)K- Z[4] →H ↙H*180/( R*π)+ Z[14]→T ↙R*Sin(T)+ Z[8]→Z[23] ↙R*(1-Cos(T))+ Z[10]→Z[24] ↙if O>0 :Then T +E→T : Eles E-T →T : T<0=>360+T→T : Ifend ↙Goto 8 ↙Lb1 7 ↙(第二缓和曲线独立坐标)Z[1] -K →H ↙H-H^5/(40*R^2* Z[7]^2)+H^9/(3456*R^4* Z[7]^4) →U↙H^3/(6*R* Z[7])-H^7/(336*R^3* Z[7]^3) →V ↙90*H^2/( R*π* Z[7]) →T ↙Z[13]Cos(A)+ Z[12]-U*Cos(A)-V*Sin(A)→Z[23] ↙Z[13]*Sin(A)-U*Sin(A)+V*Cos(A)→Z[24] ↙if O>0 :Then F-T→T : T<0=>360+T→T : Else F+T →T : Ifend ↙Goto 8 ↙Lb1 8if O<0 : Then - Z[24]→Z[24] : Ifend ↙Z[16]+Z[23]*Cos(E) -Z[24]*Sin(E)→Z[18] ↙Z[17]+Z[23]*Sin(E)+Z[24]*Cos(E)→Z[19] ↙Return↙此程序大约占计算器2900字节!2009-12-31 20:08回复125.77.14.* 3楼此程序本人已亲自验算,无误!!2010-1-1 08:15回复124.31.192.* 4楼子程序反算里程桩名称:FSLCZLb1 1↙"XK="?X:"YK="?Y↙(输入任意测点的X、Y坐标)“K=”?K ↙(试算里程,任意输入标段内里程点即可,也可以输入大致的估算里程加快速度)Lb1 2↙Prog"SJK ":T-90 →W:W<0=>360+W→W:Abs((Y-Z[19])*Cos(W)-(X-Z[18])*Sin(W))→S↙If S<0.0001:Then Goto 4:Else Goto 3:Ifend↙Lb1 3↙K+S→K: Prog"SJK":T-90 →W:W<0=>360+W→W:Abs((Y-Z[19])*Cos W-(X-Z [18])*Sin (W)→Q↙If Q<0.0001 :Then Q→S: Goto 4:Else if Q<S: Then K+Q →K: Goto 2 :Else if Q>S :Then K-Q→K:Goto 2:Ifend:Ifen d:Ifend↙Lb1 4↙Pol (X-Z[18],Y-Z[19]:"DP(-Z+Y)=":I◢(偏距)"K=":K+S→K◢(里程)Goto 1↙Lb1 4↙Pol (X-Z[18],Y-Z[19]:------------差个撒样"DP(-Z+Y)=":I◢(偏距)"K=":K+S→K◢(里程)Goto 1↙2010-1-16 19:38回复mmmmmm085楼反算还是不太好啊2010-3-8 08:41回复116.115.217.* 6楼虽然字节占得多了些,不过挺实用的。
卡西欧5800公路坐标正反算程序
目录一、坐标正算基本公式………………………………………………………02二、坐标反算原理 (04)三、高程数据库录入变换 (05)四、计算器程序………………………………………………………07 01、ZBZS(坐标正算)………………………………………………………0702、ZBFS(坐标反算)………………………………………………………0803、GCJF(高程积分) (09)04、PJFY(坡脚放样)………………………………………………………1005、JFCX(积分程序) (11)06、ZBFY(坐标放样)………………………………………………………1107、DT(递推) (12)08、H P(横坡) (13)09、LK(路宽)………………………………………………………1410、SJK1(平面数据库) (14)11、SJK2(纵面数据库)………………………………………………1412、SJK3(左路宽度数据库) (15)13、SJK4(右路宽度数据库) (15)14、SJK5(横坡数据库)......................................................1615、SJK6(下边坡数据库) (16)16、SJK7(左上边坡数据库)………………………………………………1717、SJK8(右上边坡数据库)………………………………………………18五、后记 (19)CASIO 5800计算器公路工程测量程序一、正算所涉及得计算公式 X R i d XαβBd Y d l d βI图表 错误!不能识别的开关参数。
在图1中,A 点为回旋曲线起点,B 点为回旋曲线止点,I 点为所求坐标点。
设: A点得X 坐标为X A ,Y 坐标为Y A ,A点得切线方位角为α,A 点得曲率为ρA,A 点得里程为LA,B 点得曲率为ρB,B点得里程为L B,I 点得曲率为ρI ,I点得里程为LI 。
5800计算器全线坐标计算放样正反算程序
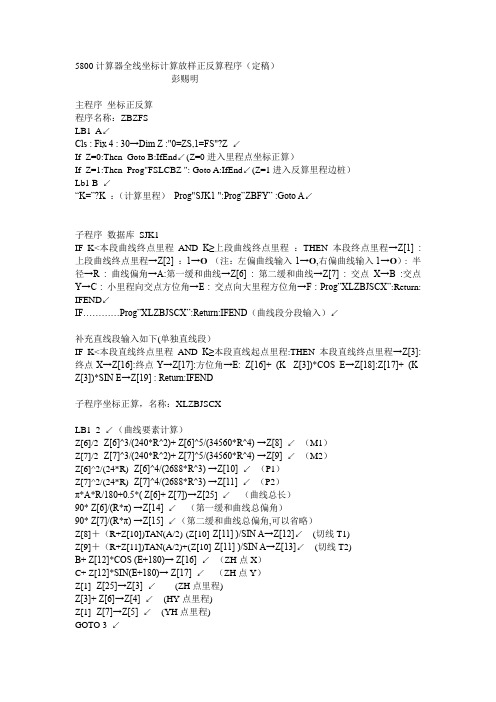
5800计算器全线坐标计算放样正反算程序(定稿)彭赐明主程序坐标正反算程序名称:ZBZFSLB1 A↙Cls : Fix 4 : 30→Dim Z :"0=ZS,1=FS"?Z ↙If Z=0:Then Goto B:IfEnd↙(Z=0进入里程点坐标正算)If Z=1:Then Prog"FSLCBZ ": Goto A:IfEnd↙(Z=1进入反算里程边桩)Lb1 B ↙“K=”?K :(计算里程)Prog"SJK1 ":Prog”ZBFY” :Goto A↙子程序数据库 SJK1IF K<本段曲线终点里程 AND K≥上段曲线终点里程:THEN 本段终点里程→Z[1] : 上段曲线终点里程→Z[2] :1→O(注:左偏曲线输入-1→O,右偏曲线输入1→O): 半径→R : 曲线偏角→A:第一缓和曲线→Z[6] : 第二缓和曲线→Z[7] : 交点X→B :交点Y→C : 小里程向交点方位角→E : 交点向大里程方位角→F : Prog”XLZBJSCX”:Return: IFEND↙IF…………Prog”XLZBJSCX”:Return:IFEND(曲线段分段输入)↙补充直线段输入如下(单独直线段)IF K<本段直线终点里程AND K≥本段直线起点里程:THEN 本段直线终点里程→Z[3]:终点X→Z[16]:终点Y→Z[17]:方位角→E: Z[16]+ (K- Z[3])*COS E→Z[18]:Z[17]+ (K- Z[3])*SIN E→Z[19] : Return:IFEND子程序坐标正算,名称:XLZBJSCXLB1 2 ↙(曲线要素计算)Z[6]/2- Z[6]^3/(240*R^2)+ Z[6]^5/(34560*R^4) →Z[8] ↙(M1)Z[7]/2- Z[7]^3/(240*R^2)+ Z[7]^5/(34560*R^4) →Z[9] ↙(M2)Z[6]^2/(24*R)- Z[6]^4/(2688*R^3) →Z[10] ↙(P1)Z[7]^2/(24*R)- Z[7]^4/(2688*R^3) →Z[11] ↙(P2)π*A*R/180+0.5*( Z[6]+ Z[7])→Z[25] ↙(曲线总长)90* Z[6]/(R*π) →Z[14] ↙(第一缓和曲线总偏角)90* Z[7]/(R*π) →Z[15] ↙(第二缓和曲线总偏角,可以省略)Z[8]+(R+Z[10])TAN(A/2)-(Z[10]-Z[11] )/SIN A→Z[12]↙(切线T1)Z[9]+(R+Z[11])TAN(A/2)+(Z[10]-Z[11] )/SIN A→Z[13]↙(切线T2)B+ Z[12]*COS (E+180)→ Z[16] ↙(ZH点X)C+ Z[12]*SIN(E+180)→ Z[17] ↙(ZH点Y)Z[1]- Z[25]→Z[3] ↙(ZH点里程)Z[3]+ Z[6]→Z[4] ↙(HY点里程)Z[1]- Z[7]→Z[5] ↙(YH点里程)GOTO 3 ↙LB1 3 ↙(判断里程点与曲线关系)IF K≤Z[3] AND K> Z[2] : THEN GOTO 4 : IFEND ↙IF K≤Z[4] AND K> Z[3] : THEN GOTO 5 : IFEND ↙IF K≤Z[5] AND K> Z[4] : THEN GOTO 6 : IFEND ↙IF K≤Z[1] AND K> Z[5] : THEN GOTO 7 : IFEND ↙LB1 4 ↙(里程小于直缓点直线独立坐标)K- Z[3] →Z[23] : 0→Z[24] : E→T : GOTO 8↙LB1 5 ↙(第一缓和曲线独立坐标)K- Z[3] →H ↙H-H^5/(40*R^2* Z[6]^2)+H^9/(3456*R^4* Z[6]^4) →Z[23] ↙H^3/(6*R* Z[6])-H^7/(336*R^3* Z[6]^3) →Z[24] ↙90*H^2/( R*π* Z[6]) →T ↙IF O>0 :THEN T +E→T : ELSE E-T →T : T<0=>360+T→T : IFEND ↙GOTO 8 ↙LB1 6 ↙(圆曲线独立坐标)K- Z[4] →H ↙H*180/( R*π)+ Z[14]→T ↙R*SIN T+ Z[8]→Z[23] ↙R*(1-COS T)+ Z[10]→Z[24] ↙IF O>0 :THEN T +E→T : ELSE E-T →T : T<0=>360+T→T : IFEND ↙GOTO 8 ↙LB1 7 ↙(第二缓和曲线独立坐标)Z[1] -K →H ↙H-H^5/(40*R^2* Z[7]^2)+H^9/(3456*R^4* Z[7]^4) →U↙H^3/(6*R* Z[7])-H^7/(336*R^3* Z[7]^3) →V ↙90*H^2/( R*π* Z[7]) →T ↙Z[13]COS A+ Z[12]-U*COS A-V*S IN A→Z[23] ↙Z[13]*SIN A-U*SIN A+V*COS A→Z[24]↙IF O>0 :THEN F-T→T : T<0=>360+T→T : ELSE F+T →T : IFEND ↙GOTO 8 ↙LLb1 8IF O<0 : THEN - Z[24]→Z[24] : IFEND ↙Z[16]+Z[23]*COS E-Z[24]*SIN E→Z[18] ↙Z[17]+Z[23]*SIN E+Z[24]*COS E→Z[19] ↙ReTurn↙子程序反算里程边桩,名称:FSLCBZLb1 1↙"XK="?X:"YK="?Y↙(输入任意测点的XY坐标):“K=”?K (试算里程,任意输入标段内里程点即可,也可以输入大致的估算里程加快速度)↙Lb1 2↙Prog"SJK1 ":T-90 →W:W<0=>360+W→W:Abs((Y-Z[19])*Cos W-(X-Z[18])*Sin W)→S↙If S<0.0001:Then Goto 4:Else Goto 3:Ifend↙Lb1 3↙K+S→K: Prog"S JK1":T-90 →W:W<0=>360+W→W:Abs((Y-Z[19])*Cos W-(X-Z[18])*Sin W)→Q↙If Q<0.0001 :Then Q→S: Goto 4:Else IF Q<S: THEN K+Q→K: Goto 2 :Else IF Q>S :THEN K-Q→K:G oto 2:Ifend:Ifend:Ifend↙Lb1 4↙Pol (X-Z[18],Y-Z[19]:"DP(-Z+Y)=":I◢(偏距)(由于该程序不能准确判断边桩左右方向,暂作修改,取消左右边判定)"K=":K+S→K◢(里程)Return↙子程序坐标放样:ZBFYLB1 0 ↙“XHS="?G(后视点X):"YHS="?L(后视点Y):"XZJ="?M(置镜点X):"YZJ="?N(置镜点Y):Pol(G-M,L-N):"DH=":I(后视距)◢J<0=>J+360→J:"FH=":J→DMS◢(后视方位角) “QXJ=” :T◢(计算里程点切线方位角,可以不显示)“XI=” : Z[18] ◢(中线X)“YI=” : Z[19] ◢(中线Y)Pol(Z[18]-M,Z[19]-N):"DI=":I(中桩放样距)◢J<0=>J+360→J:"FI=":J→DMS◢(中桩放样方位角)“PJ=”?P◢(输入边桩与线路夹角,左-右+)“PD=”?D◢(输入边桩距)Z[18]+D*COS(T+P) →Z[20] ↙Z[19]+D*SI N(T+P) →Z[21] ↙“XP=”: Z[20] ◢(边桩X)“YP=”: Z[21] ◢(边桩Y)Pol(Z[20]-M,Z[21]-N):"DP=":I◢(边桩放样距)J<0=>J+360→J:"FP=":J→DMS◢(边桩放样方位角)Return↙。
5800 坐标正算程序、坐标反算程序
CASIO FX-5800 P坐标正算反算
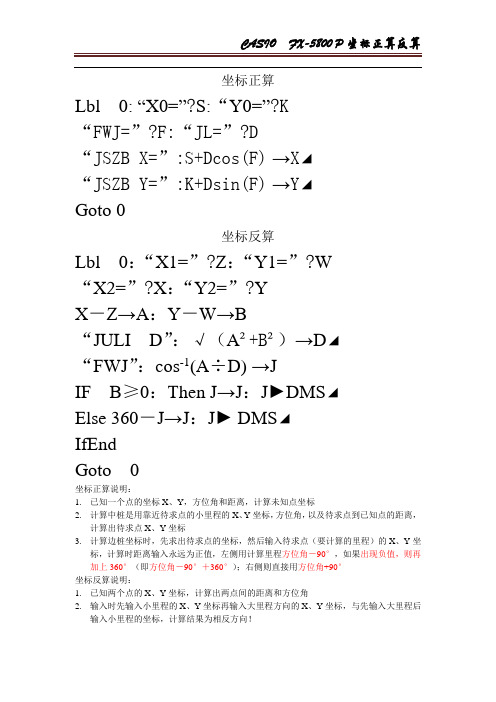
坐标正算
Lbl 0: “X0=”?S:“Y0=”?K
“FWJ=”?F:“JL=”?D
“JSZB X=”:S+Dcos(F)→X◢
“JSZB Y=”:K+Dsin(F)→Y◢
Goto 0
坐标反算
Lbl 0:“X1=”?Z:“Y1=”?W
“X2=”?X:“Y2=”?Y
X-Z→A:Y-W→B
“JULI D”:√(A²+B²)→D◢“FWJ”:cos-1(A÷D) →J
IF B≥0:Then J→J:J►DMS◢
Else 360-J→J:J► DMS◢
IfEnd
Goto 0
坐标正算说明:
1.已知一个点的坐标X、Y,方位角和距离,计算未知点坐标
2.计算中桩是用靠近待求点的小里程的X、Y坐标,方位角,以及待求点到已知点的距离,
计算出待求点X、Y坐标
3.计算边桩坐标时,先求出待求点的坐标,然后输入待求点(要计算的里程)的X、Y坐
标,计算时距离输入永远为正值,左侧用计算里程方位角-90°,如果出现负值,则再加上360°(即方位角-90°+360°);右侧则直接用方位角+90°
坐标反算说明:
1.已知两个点的X、Y坐标,计算出两点间的距离和方位角
2.输入时先输入小里程的X、Y坐标再输入大里程方向的X、Y坐标,与先输入大里程后
输入小里程的坐标,计算结果为相反方向!。
卡西欧5800公路坐标正反算程序
卡西欧5800公路坐标正反算程序卡西欧5800公路坐标正反算程序是一种用于测量和计算公路坐标的工具,可以帮助测量员准确地确定公路上的位置和坐标。
本文将详细介绍卡西欧5800公路坐标正反算程序的功能、使用方法以及相关注意事项。
一、功能介绍卡西欧5800公路坐标正反算程序具有以下主要功能:1. 坐标正算:根据已知的起点坐标、方位角和距离,计算出目标点的坐标。
2. 坐标反算:根据已知的起点坐标和目标点坐标,计算出方位角和距离。
3. 坐标转换:支持不同坐标系之间的转换,如高斯投影坐标系、经纬度坐标系等。
4. 坐标纠正:根据已知的控制点坐标和实测点坐标,进行坐标纠正和校正。
二、使用方法1. 坐标正算:步骤1:进入卡西欧5800公路坐标正反算程序。
步骤2:输入起点坐标(经度、纬度)、方位角和距离。
步骤3:点击计算按钮,程序将自动计算并显示目标点的坐标。
2. 坐标反算:步骤1:进入卡西欧5800公路坐标正反算程序。
步骤2:输入起点坐标(经度、纬度)和目标点坐标(经度、纬度)。
步骤3:点击计算按钮,程序将自动计算并显示方位角和距离。
3. 坐标转换:步骤1:进入卡西欧5800公路坐标正反算程序。
步骤2:选择需要转换的坐标系类型。
步骤3:输入待转换的坐标信息。
步骤4:点击转换按钮,程序将自动进行坐标转换并显示结果。
4. 坐标纠正:步骤1:进入卡西欧5800公路坐标正反算程序。
步骤2:输入已知的控制点坐标和实测点坐标。
步骤3:点击纠正按钮,程序将自动进行坐标纠正和校正,并显示结果。
三、注意事项1. 在使用卡西欧5800公路坐标正反算程序之前,确保已正确安装和配置软件,并且设备连接正常。
2. 在进行坐标计算和转换时,输入的坐标信息应准确无误,以确保计算结果的准确性。
3. 在进行坐标纠正时,应选择合适的控制点和实测点,并确保其坐标信息准确无误。
4. 在使用过程中,如遇到问题或需要进一步了解功能细节,可以参考使用手册或联系卡西欧客服进行咨询。
5800坐标计算,竖曲线缓和曲线程序

A+Q(Cos(C) +4(Cos(M)+Cos(N))+2Cos(K)+Cos(J))÷12→U:
Lbl 4: "END″
说明:QZHAO:曲中点里程(竖曲线),QDHAO:起点里程,ZDHAO:终点里程,B—HB曲中点高程,SX:上下(路面标高下多少为水稳层面),I1:第一坡度,I2:第二坡度,R:半径,T切线长,L—DQHAO:待求点里程,PY:偏移(中桩到边桩的距离),XIELV:斜率(横坡的坡度,左负右正)o-YIGAO:仪器高a
Goto 1
Lbl 2
L<G Goto 4
"HL=″:B+0.01 (L-J)C+0.01UV+Q →H
"H0=″:o-H→H
Goto 1
Lab 3
L>K Goto 4
"HL=″:B+0.01 (L-J)D+0.01UV+Q →H
"HO=:o-H→Z
Goto 1
Lbl 1
"L—DQHAO=″?L:"PY=″?U:"XIELV=″?V
If L<X:Then Goto 2:Else If L>Y:Then Goto 3:If End:I End
"HL=″:B+0.01C(L-J)+A(L-J+T) ÷(2R)+0.01UV+Q→Q
5800(交点法)坐标计算及反算
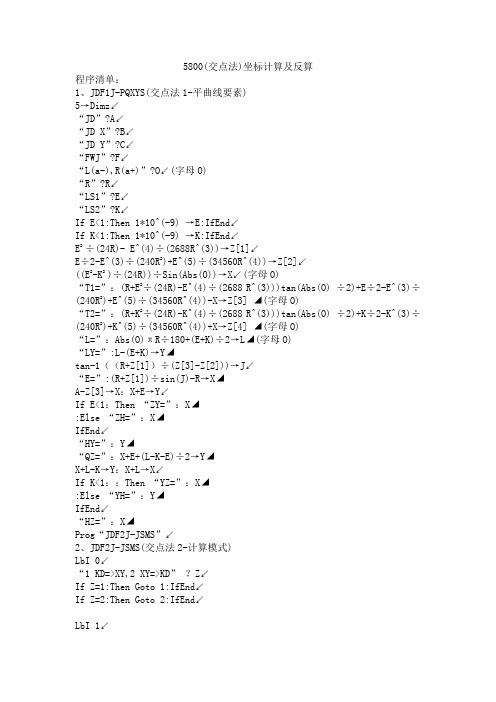
5800(交点法)坐标计算及反算程序清单:1、JDF1J-PQXYS(交点法1-平曲线要素)5→Dimz↙“JD”?A↙“JD X”?B↙“JD Y”?C↙“FWJ”?F↙“L(a-),R(a+)”?O↙(字母O)“R”?R↙“LS1”?E↙“LS2”?K↙If E<1:Then 1*10^(-9) →E:IfEnd↙If K<1:Then 1*10^(-9) →K:IfEnd↙E2 ÷(24R)- E^(4)÷(2688R^(3))→Z[1]↙E÷2-E^(3)÷(240R2)+E^(5)÷(34560R^(4))→Z[2]↙((E2-K2 )÷(24R))÷Sin(Abs(O))→X↙(字母O)“T1=”:(R+E2÷(24R)-E^(4)÷(2688 R^(3)))tan(Abs(O) ÷2)+E÷2-E^(3)÷(240R2)+E^(5)÷(34560R^(4))-X→Z[3] ◢(字母O)“T2=”:(R+K2÷(24R)-K^(4)÷(2688 R^(3)))tan(Abs(O) ÷2)+K÷2-K^(3)÷(240R2)+K^(5)÷(34560R^(4))+X→Z[4] ◢(字母O)“L=”:Abs(O)πR÷180+(E+K)÷2→L◢(字母O)“LY=”:L-(E+K)→Y◢tan-1((R+Z[1])÷(Z[3]-Z[2]))→J↙“E=”:(R+Z[1])÷sin(J)-R→X◢A-Z[3]→X:X+E→Y↙If E<1:Then “ZY=”:X◢:Else “ZH=”:X◢IfEnd↙“HY=”:Y◢“QZ=”:X+E+(L-K-E)÷2→Y◢X+L-K→Y:X+L→X↙If K<1::Then “YZ=”:X◢:Else “YH=”:Y◢IfEnd↙“HZ=”:X◢Prog“JDF2J-JSMS”↙2、JDF2J-JSMS(交点法2-计算模式)LbI 0↙“1 KD=>XY,2 XY=>KD”?Z↙If Z=1:Then Goto 1:IfEnd↙If Z=2:Then Goto 2:IfEnd↙LbI 1↙“JS K”?P:“BZ(m)”?D:“BJ(°)”?W↙Prog“JDF3JPZS”↙“X=”:X◢“Y=”:Y◢If Z=1: Then Goto 1:Goto 1:IfEnd↙LbI 2↙“X”?X:“Y”?Y:“BJ(°)”?W↙Prog“JDF4JPFS”↙“JS K”:P◢“BZ(m)=”:D◢If Z=2: Then Goto 2:Goto 2:IfEnd↙3、JDF3JPZS (交点法3平曲线正算)LbI 1↙F→J↙B-Z[3]cos(F)→X↙C-Z[3]sin(F)→Y↙E→G↙If P≤A-Z[3]:Then A-Z[3]-P→I:-I→M:0→N:F+W→H: Goto5:IfEnd↙(数字0)If P≤A-Z[3]+E:Then P-A+Z[3]→I:90I2÷(REπ)→H: O<0=>-H→H:(前面为字母0,后面为数字0)H+W+F→H: Goto 3: IfEnd↙If P≤A-Z[3]+L-K:Then P-A+Z[3]-E→I: Goto 4:Else Goto2: IfEnd↙LbI 2↙B+Z[4]cos(F+O)→X↙(字母0)C+Z[4]sin(F+O)→Y↙(字母0)F+O+180→J↙(字母0)K→G↙If P≤A-Z[3]+L:Then A-Z[3]+L-P→I:90I2÷(RKπ)→H: O>0=>-H→H:(前面为字母0,后面为数字0)H+J+W+180→H: Goto 3 :Else P-A+Z[3]-L→I:-I→M:0→N:(数字0)J+W+180→H: Goto 5:IfEnd↙LbI 3↙I-I^(5)÷(40(RG)2)→M↙I^(3)÷(6GR)-I^(7)÷(336(RG)^(3))→N↙Goto 5↙LbI 4↙(E+2I)×90÷(πR)→H↙Rsin(H)+Z[2]→M↙R(1-cos(H))+Z[1]→N↙O<0=>-H→H↙(前面为字母0,后面为数字0)J+H+W→H↙Goto 5↙LbI 5 ↙If P≤A-Z[3]+L-K:Then O<0(前面为字母0,后面为数字0)=>-N→N:Else O>0(前面为字母0,后面为数字0)=>-N→N: Goto 6: IfEnd↙LbI 6 ↙X+Mcos(J)-Nsin(J)+Dcos(H)→X↙Y+Msin(J)+Ncos(J)+Dsin(H)→Y↙4、JDF4JPFS(交点法4平曲线反算)X→U:Y→V:0→D:F-W→J↙(数字0)A+(Y-C)cos(J)-(X-B)sin(J)→P↙LbI 1↙Prog“JDF3JPZS”↙H-180→J↙(V-Y)cos(J)-(U-X)sin(J)→I↙If Abs(I)<10^(-4):Then Goto 2:Else P+I→P: Goto1: IfEnd↙LbI 2↙(V-Y)÷sin(H)→D↙程序简介本套程序共有1个主程序,3个子程序,适用于CASIO-5800用户。
FX5800计算器公路全线坐标正、反算计算程序
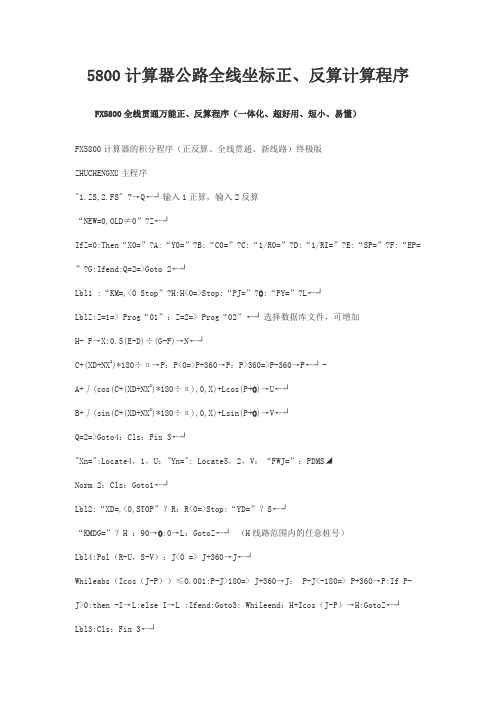
5800计算器公路全线坐标正、反算计算程序FX5800全线贯通万能正、反算程序(一体化、超好用、短小、易懂)FX5800计算器的积分程序(正反算、全线贯通、新线路)终极版ZHUCHENGXU主程序"1.ZS,2.FS" ?→Q←┘输入1正算,输入2反算“NEW=0,OLD≠0”?Z←┘IfZ=0:Then“X0=”?A:“Y0=”?B:“C0=”?C:“1/R0=”?D:“1/RI=”?E:“SP=”?F:“EP=”?G:Ifend:Q=2=>Goto 2←┘Lbl1 :“KM=,<0 Stop”?H:H<0=>Stop:“PJ=”?O:“PY=”?L←┘LblZ:Z=1=> Prog“01”:Z=2=> Prog“02”←┘选择数据库文件,可增加H- F→X:0.5(E-D)÷(G-F)→N←┘C+(XD+NX2)*180÷π→P:P<0=>P+360→P:P>360=>P-360→P←┘-A+∫(cos(C+(XD+NX2)*180÷π),0,X)+Lcos(P+O)→U←┘B+∫(sin(C+(XD+NX2)*180÷π),0,X)+Lsin(P+O)→V←┘Q=2=>Goto4:Cls:Fix 3←┘"Xn=":Locate4,1,U:"Yn=": Locate5,2,V:“FWJ=”:PDMS◢Norm 2:Cls:Goto1←┘Lbl2:“XD=,<0,STOP”?R:R<0=>Stop:“YD=”?S←┘“KMDG=”?H :90→O:0→L:GotoZ←┘(H线路范围内的任意桩号)Lbl4:Pol(R-U,S-V):J<0 => J+360→J←┘Whileabs(Icos(J-P))≤0.001:P-J>180=> J+360→J: P-J<-180=> P+360→P:If P-J>0:then -I→L:else I→L :Ifend:Goto3: Whileend:H+Icos(J-P)→H:GotoZ←┘Lbl3:Cls:Fix 3←┘“KM=”: Locate4,1,H:“PY=”: Locate4,2,L◢Norm 2:Cls:Goto2←┘01(数据库子程序)If H<=第一曲线终点桩号:then第一曲线起点X→A:第一曲线起点Y→B:第一曲线起点方位角→C:起点曲率→D:终点曲率→E:起点桩号→F:终点桩号→G:return:ifend ……………程序说明:1、该程序可以计算任意线形(直线、圆曲线、缓和曲线、不完整曲线)任意桩号的坐标(正算,输入1),也可根据坐标计算该点到线路的距离及垂足桩号(反算,输入2);2、(NEW=0,OLD≠0)?如果要计算的点为数据库线路中的点,则输入数据库编号(以整数1、2、3…代替输入);如果在数据库中没有要计算线路的数据,则输入曲线要素X0:曲线起点X坐标;Y0:曲线起点Y坐标;C0:曲线起点方位角;R0-1、 RI-1:曲线起点、终点曲率,直线为0,曲线左偏输入负值,右偏输入正值;SP、 EP:曲线起点桩号,终点桩号;KM:待求点桩号;PJ:正斜交的设定;PY:偏中距离,线路上的点输入0,右偏输入+值,左偏输入-值;3、正算显示坐标及切线方位角;反算输入线路的任意桩号(此桩号越接近真实值计算速度越快)、待求点坐标,显示待求点桩号及偏中距离;4、正算子程序为积分公式编写而成;反算子程序为角度趋近的方法编写,计算速度有点慢。
5800直线道路全线任意点坐标正反算(已优化)

CASIO fx-5800P ZXZFS直线坐标正反算程序V1.5说明:该程序适用于计算器 CASIO fx-5800P直线坐标正算、反算,可连续计算中桩及边桩坐标其斜交等,还可以反算线路外一点距线路中心的里程和垂距。
增加高程计算时错误主程序名:ZXZFS第1步 Deg:Fix 3“1.JL”:“2.2HJ”?→VV=1=>PROG “JL”:V=2=>PROG “2HJ”。
第2步 Lbl C:"1.DK=>XY":"2.XY=>DK":?W:Lbl 1:"K0+"?E第3步 If W=1:Then Goto A:Else If W=2:Then Goto B:Else Goto C:IfEnd第4步 Lbl A:"E"?G90=H (90为与中线夹角)第5步 B+(E-A)×cos(F)+G×cos(F+H)→X第6步 C+(E-A)×sin(F)+G×sin(F+H)→Y第7步 Cls:"X=":Locate 3,1,X:"Y=":Locate 3,2,Y◢第8步"ZJD(X)"?S:"ZJD(Y)"?T第9步 Pol(X-S,Y-T):I→M第10步 If J<0:Then J+360→N:Else J→N:IfEnd第11步 Cls:"JL=":Locate 4,1,M:"FY=":Locate 4,2,N°◢第12步 Goto C第13步 Lb1 B:"X="?K:"Y="?L第14步 Pol(K-B,L-C):I→D:If J<0:Then J+360→P:Else J→P:IfEnd第15步 If F<P:Then P-F→O:Else F-P→O:IfEnd第16步 Sin(O)×D→Q第17步 A+Q÷tan(O)→R第18步 sin(O)×D→Q:If F<P:Then 1×Q→Q:Else -1×Q→Q:IfEnd第19步 Cls:"DK=":Locate 4,1,R:"PJ=":Locate 4,2,Q◢第20步 Goto C数据库名:ZXZFSSJ第1步 Goto 1第2步 Lb1 1:If E<259105:Then 256100→A:2575647.999→B:495400.3447→C:221°47ˊ20.24″→F:Return:IfEnd第n步……………………………………………………数据库说明:第1步 Goto 1第2步 Lb1 1:If E<7586.706:Then 7152.5561→A:3378672.9776→B:453219.8377→C:98°56ˊ55.65″→F:Return:IfEnd第2步 Lb1 1:If E<止点桩号:Then 起点桩号→A:起点坐标X→B:起点坐标Y→C:起点方位角F→F:Return:IfEnd第n步 Lbl 1:每增加一行则为增加一个竖曲线要素。
FX5800正算、反算、曲线

工程测量计算器编辑程序公式用表坐标正算(ZS):{DAMN}: DAMN: X=M+D cos A: Y=N+D sin A: X◢ Y◢D:边长(测量的或算的)A:方位角(MN与XY坐标的坐标角度).M:已知点X坐标(X1);N:已知点Y坐标(Y1)(架设仪器坐标).X:测点X坐标(X2);Y:测点Y坐标(Y2)(棱镜坐标).反算坐标(FS):{XYMN}: XYMN: J=0: H=pol(X-M,Y-N): J<0=>J=J+360⊿ J≥360=>J-360⊿ J◢ H◢X:定向点X坐标(X2);Y:定向点Y坐标(Y2).M:置仪点X坐标(X1);N:置仪点Y坐标(Y1).J◢:方位角(以度为单位);H:边长距离(坐标与坐标的距离).圆曲线QX:{ZVWAPR}: ZVWAPR: K=1: P<0=>K=-1: P=-P⊿ T=R×tan(P÷2): T◢ L=π÷180×PR:L◢E=R×((COS(P÷2))-1-1):E◢LbL1:{MN}:MN:LbL2: {DU}:DU:J=0:C=Z-T:F=Z-T+L: D=Z=>Goto1⊿ D<C=>Goto3⊿ D≥C=>D <F=>Goto4⊿ D>F=>Goto5⊿LbL3: B=A+180: G=Z-D: X=V+Rec(G,B): X ◢Y=W+J:Y◢ D<C=>U=0=>Goto6:≠=> X=X+Rec(U,A+K×90):X◢Y=Y+J: Y◢Goto6⊿LbL4: G=E+R: B=A+KP÷2+90K: X=V+ Rec(G,B): Y=W+J: I=(D-C)÷2πR×360: B=A+90K+180+KI: X=X+Rec(R+KU,B):Y=Y+J: X◢ Y◢Goto6⊿LbL5:G=D-F:B=A+KP: X=V+Rec(T,B):Y=W+J:X=X+Rec(G,B): X◢ Y=Y+J: Y◢ D ≥F=>U=0=>Goto6:≠=> X=X+ Rec(K U,B+90):X◢ Y=Y+J:Y◢Goto6⊿LbL6: H=Pol(X-M,Y-N):J≥360=>J=J-360⊿ J<0=>J=J+360⊿ J◢ H◢Goto2Z:角桩(转点)里程桩号(长度)V:角桩X坐标,W:角桩Y坐标(转角)A:前直线方位角,P:转角(右为正,左为负) R:圆曲线半径,T:切线长L:圆曲线长度,E:外矢距(曲中点到交点距离) M:置仪点X坐标,N:置仪点Y坐标D:里程桩号(如果另置站输入2,再输入M,N) U:边桩距中桩距离J:方位角,H距离(平距)平差:角度影响X坐标,长度影响Y坐标.。
卡西欧5800计算器坐标正反算程序(带详细说明)
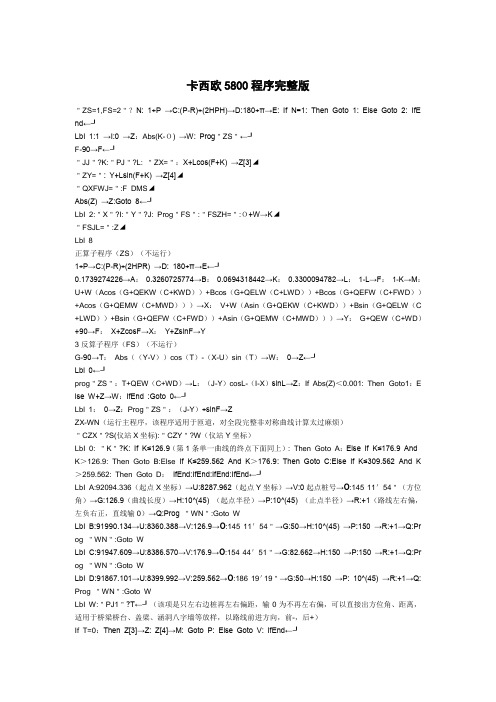
卡西欧5800程序完整版"ZS=1,FS=2"?N: 1÷P →C:(P-R)÷(2HPH)→D:180÷π→E: If N=1: Then Goto 1: Else Goto 2: IfE nd←┚LbI 1:1 →I:0 →Z:Abs(K-O) →W: Prog"ZS"←┚F-90→F←┚"JJ"?K:"PJ"?L: "ZX=":X+Lcos(F+K) →Z[3]◢"ZY=": Y+Lsin(F+K) →Z[4]◢"QXFWJ=":F DMS◢Abs(Z) →Z:Goto 8←┚LbI 2:"X"?I:"Y"?J: Prog"FS":"FSZH=":O+W→K◢"FSJL=":Z◢Lbl 8正算子程序(ZS)(不运行)1÷P→C:(P-R)÷(2HPR) →D: 180÷π→E←┚0.1739274226→A:0.3260725774→B:0.0694318442→K:0.3300094782→L:1-L→F:1-K→M:U+W(Acos(G+QEKW(C+KWD))+Bcos(G+QELW(C+LWD))+Bcos(G+QEFW(C+FWD))+Acos(G+QEMW(C+MWD)))→X:V+W(Asin(G+QEKW(C+KWD))+Bsin(G+QELW(C +LWD))+Bsin(G+QEFW(C+FWD))+Asin(G+QEMW(C+MWD)))→Y:G+QEW(C+WD)+90→F:X+ZcosF→X:Y+ZsinF→Y3反算子程序(FS)(不运行)G-90→T:Abs((Y-V))cos(T)-(X-U)sin(T)→W:0→Z←┚Lbl 0←┚prog"ZS":T+QEW(C+WD)→L:(J-Y)cosL-(I-X)sinL→Z:If Abs(Z)<0.001: Then Goto1:E lse W+Z→W:IfEnd :Goto 0←┚Lbl 1:0→Z:Prog"ZS":(J-Y)÷sinF→ZZX-WN(运行主程序,该程序适用于匝道,对全段完整非对称曲线计算太过麻烦)"CZX"?S(仪站X坐标):"CZY"?W(仪站Y坐标)LbI 0: "K"?K: If K≤126.9(第1条单一曲线的终点下面同上): Then Goto A:Else If K≤176.9 And K>126.9: Then Goto B:Else If K≤259.562 And K>176.9: Then Goto C:Else If K≤309.562 And K >259.562: Then Goto D:IfEnd:IfEnd:IfEnd:IfEnd←┚LbI A:92094.336(起点X坐标)→U:8287.962(起点Y坐标)→V:0起点桩号→O:145°11'54"(方位角)→G:126.9(曲线长度)→H:10^(45) (起点半径)→P:10^(45) (止点半径)→R:+1(路线左右偏,左负右正,直线输0)→Q:Prog "WN":Goto WLbI B:91990.134→U:8360.388→V:126.9→O:145°11'54"→G:50→H:10^(45) →P:150 →R:+1→Q:Pr og "WN":Goto WLbI C:91947.609→U:8386.570→V:176.9→O:154°44'51"→G:82.662→H:150 →P:150 →R:+1→Q:Pr og "WN":Goto WLbI D:91867.101→U:8399.992→V:259.562→O:186°19'19"→G:50→H:150 →P: 10^(45) →R:+1→Q: Prog "WN":Goto WLbI W:"PJ1"?T←┚(该项是只左右边桩再左右偏距,输0为不再左右偏,可以直接出方位角、距离,适用于桥梁桥台、盖梁、涵洞八字墙等放样,以路线前进方向,前-,后+)If T=0:Then Z[3]→Z: Z[4]→M: Goto P: Else Goto V: IfEnd←┚LbI V:"JJ1"? O←┚(左右边桩再偏夹角,用180°减去路线夹角)"X1=": Z[3]+Tcos(F+N+ O)→U◢"Y1=":Z[4]+Tsin(F+N+ O)→V◢U→Z: V→M: GotoP←┚LbI P:Pol(Z-S,M-W): If J≤0:Then J+360°→J: IfEnd←┚"JL=":I◢(仪站至测点的距离)"FWJ=":J DMS◢(仪站至测点的方位角)Goto0备注:1.规定以道路中线前进方向(即里程增大的方向)区分左右;当线元往左偏时Q=-1;当元线往右偏时,Q=1:当元线为直线时,Q=0。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CASIO fx-5800P线元法坐标正反算程序V2.0说明:本程序适用于卡西欧计算器 CASIO fx-5800P,可对全线贯通坐标正反算、竖曲线高程计算。
该程序可计算任意线型,包含(直线、圆曲线、缓和曲线、卵形曲线)等,还可以能通过坐标反推该点里程和距中线距离,适用测量员专用。
主程序名:ABCYT第1步Deg:Fix 3:10→DimZ第2步Lbl 3:"1.DK=>XY":"2.XY=>DK":"Q"?W:"K0+"?S:Prog"ABCYTSJ":If P=0:Then 10^(45)→P:IfEnd:If R=0:Then 10^(45)→R:IfEnd第3步1÷P→C:(P-R)÷(2HPR)→D:180÷π→E:If W=1:Then Goto 1:Else Goto2:IfEnd第4步Lbl 1:"E"?Z90=N:Abs(S-O)→W:Prog "ABCYTZ"第5步Cls:"F=":Locate 3,1,F°:"X=":Locate 3,2,X:"Y=":Locate 3,3,Y◢第6步Prog"ABCYTSQX":Cls:"H=":Locate 3,1,H◢第7步1→W:90→N:Goto 3第8步Lbl 2:?X:?Y:X→I:Y→J:Prog"ABCYTF":O+W→S第9步Cls:"K=":Locate 3,1,S:"E=":Locate 3,2,Z◢第10步2→W:Goto 3正算子程序名:ABCYTZ第1步0.1739274226→A:0.3260725774→B:0.0694318442→K:0.3300094782→L第2步1-L→F:1-K→M第3步U+W×(A×cos(G+Q×E×K×W×(C+K×W×D))+B×cos(G+Q×E×L×W×(C+L×W×D))+B×cos(G+Q×E×F×W×(C+F×W×D))+A×cos(G+Q×E×M×W×(C+M×W×D)))→X第4步V+W×(A×sin(G+Q×E×K×W×(C+K×W×D))+B×sin(G+Q×E×L×W×(C+L×W×D))+B×sin(G+Q×E×F×W×(C+F×W×D))+A×sin(G+Q×E×M×W×(C+M×W×D)))→Y第5步G+Q×E×W×(C+W×D)→F:F+ N→Z[1]第6步X+Z×cos(Z[1])→X:Y+Z×sin(Z[1])→Y反算子程序名:ABCYTF第1步Lbl 2:(S-O)→W:0→Z:Prog "ABCYTZ":F-90→Z[9]:(J-Y)×cos(Z[9])-(I-X)×sin(Z[9])→Z[10]第2步If Abs(Z[10])>0.001:Then S+Z[10]→S:Goto 2:Else Goto 1:IfEnd第3步Lbl 1:(Y-J)÷sin(Z[9])→Z数据库名:ABCYTSJ第1步Goto1第2步Lbl 1:If S<7586.707 Or S>13346.96:Then Cls:Locate 2,2,"PQX":Locate 4,3,"CHAOXIAN":Locate 10,4,"→Stop"◢第3步Stop:IfEnd第4步Lbl 1:IF S<7946.707:Then 98°56′56″→G:7586.707→o:3378605.445→U:453648.704→V:0→P:4500→R:360→H:1→Q:Return:IfEnd第5步Lbl 1:IF S<11766.03:Then 101°14′26″→G:7946.707→o:3378544.714→U:454003.518→V:4500→P:4500→R:3819.323→H:1→Q:Return:IfEnd第6步Lbl 1:IF S<12126.03:Then 149°52′11″→G:11766.03→o:3376389.890→U:457018.324→V:4500→P:0→R:360→H:1→Q:Return:IfEnd第7步Lbl 1:IF S<13346.96:Then 152°09′41.68″→G:12126.03→o:3376073.846→U:457190.654→V:0→P:0→R:1220.93→H:0→Q:Return:IfEnd第n步……………………………………………………数据输入说明:第1步Goto1第2步Lbl 1:If S<本条线路起点里程S>本条线路止点里程Cls:Locate 2,2,"PQX":Locate 4,3,"CHAOXIAN":Locate 10,4,"→Stop"◢第3步Stop:IfEnd第4步Lbl 1:If S<本线元止点里程:Then线元起点切线方位角→G:线元起点桩号→O:线元起点坐标X→U:线元起点坐标Y→V:线元起点半径(直线为0、曲线为半径)→P:线元止点半径(直线为0、曲线为半径)→R:线元长度→H:线元转向(左转为-1、右转为1、直线为0)→Q:Return:IfEnd第n步Lbl 1:每增加一行则为增加一个线元要素。
竖曲线子程序名:AB CYTSQX第1步S→C:Prog "ABCYTSQXSJ":A→Z[1]:B→Z[2]:C→Z[3]:If (Z[1]-Z[2])<0:Then 1→Z[8]:Else -1→Z[8]:IfEnd第2步R×Abs(Z[1]÷100-Z[2]÷100)→L:L÷2→T:T^(2)÷2÷R→E:K-T→Z[4]:Z[4]+L→Z[5]第3步If Z[3]≤Z[4]:Then H-(K-Z[3])×Z[1]÷100→X:Goto 3:Else If Z[3]≥Z[4] And Z[3]<K:Then H+(Z[3]-K)×Z[1]÷100→Z[6]:(Z[3]-Z[4])^(2)÷2÷R→Z[7]:Z[6]+Z[7]×Z[8]→X:Goto 3:Else If Z[3]=K:Then H+E×Z[8]→X:Goto 3:Else If Z[3]>K And Z[3]≤Z[5]:Then H+(Z[3]-K)×Z[2]÷100→Z[6]:(Z[5]-Z[3])^(2)÷2÷R→Z[7]:Z[6]+Z[7]×Z[8]→X:Goto 3:Else If Z[3]≥Z[5]:Then H+(Z[3]-K)×Z[2]÷100→X:IfEnd:Lbl 3:X→H:Return竖曲线数据库:AB CYTSQXSJ第1步Goto 1第2步Lbl 1:If S<5000.000 Or S>11211.997:Then Cls:Locate 2,2,"SQX":Locate 4,3,"CHAOXIAN":Locate 10,4,"→Stop"◢第3步Stop:IfEnd第4步Lb1 1:If S<5900.000:Then 5800.000→K:323.527→H:20000→R:-0.5800→A:0.4200→B:Return:IfEnd第5步Lb1 1:If S<8982.000:Then 8910.000→K:336.589→H:20000→R:0.4200→A:-0.3000→B:Return:IfEnd第6步Lb1 1:If S<11211.997:Then 11187.000→K:329.758→H:20000→R:-0.3000→A:-0.5500→B:Return:IfEnd第n步……………………………………………………数据输入说明:第1步Goto 1第2步Lbl 1:If C<本条线路竖曲线起点里程C>本条线路竖曲线止点里程n Cls:Locate 2,2,"SQX":Locate 4,3,"CHAOXIAN":Locate 10,4,"→Stop"◢第3步Stop:IfEnd第4步Lbl 1:If C<本条竖曲线圆直桩号或止点桩号:Then 变坡点桩号→K:变坡点高程→H:竖曲线半径→R:第一纵坡(百分数单位)→A:第二纵坡(百分数单位)→B:Return:IfEnd第n步Lbl 1:每增加一行则为增加一个竖曲线要素。
程序输入说明:本程序中除了浅黄底色O表示为字母,其余均为数字0,输入程序时每输入完成1步则按EXE换行,需认真、仔细,子程序输入方式和主程序相同,若字体小请按住CTRL键然后再滑动鼠标滚动条进行缩放页面大小。
本程序中多数指令在FUNCTION中(2:COMPLX、3:PROG)查找。
Deg和Fix 按SHIFT再按MODE SETUP查找。
程序数据库可采用“曲线坐标计算程序VBA”自动生成fx-5800P数据库。
程序演示步骤:《坐标正算》运行主程序ABCYT1.DK=>XY2.XY=>DKQ? 1 (输入1为坐标正算、输入2为坐标反算)DK?= 10000(计算里程)W?= 5(边桩偏距:左为负,右为正)α?= 90(边桩偏角:正交为90°,斜交自拟)F= 127°23ˊ02.02″(计算切线方位角)X= 3377702.697(计算结果坐标X)Y= 455855.490(计算结果坐标Y)H= 333.319(计算竖曲线高程)说明:按EXE键返回主程序界面。
《坐标反算》运行主程序ABCYT1.DK=>XY2.XY=>DKQ? 1 (输入1为坐标正算、输入2为坐标反算)DK?= 10000(计算里程)X? 3377700.567(输入反算点坐标X)Y? 455950.689 (输入反算点坐标Y)K= 10076.066 (反算结果里程)S=-51.759 (反算结果偏距:负为偏左,正为偏右)说明:按EXE键返回主程序界面。