MM420和MM440闭环PI控制
西门子MM420、MM430和MM440变频器选型和功能区别

西门子MM420、MM430和MM440变频器选型和功能
区别
西门子MM420、MM430和MM440变频器选型和功能主要区别如下,详细功能区别请参考选型手册。
MM420/MM440一般应用于恒转矩负载,MM430一般应用于变转矩负载;MM420/430/440的功率范围不同:
MM420:0.12~11kw;
MM430:7.5~250kw;
MM440:0.12~200kw。
I/O端子数量区别:MM430
MM420 有3个数字输入、1个数字输出、1路模拟输入和1路模拟输出
MM430 有6个数字输入、3个数字输出、2路模拟输入和2路模拟输出
MM440 有6个数字输入、3个数字输出、2路模拟输入和2路模拟输出
MM430具有应用于流体设备上的特殊功能,例如:分级控制、PID休眠功能、旁路功能等;
MM430操作面板上具有手动/自动切换按钮,MM420/440不具有该功
能。
MM420/430仅具有V/F控制,MM440不但具有V/F还具有矢量控制;MM420/430不具有制动单元,MM440小于等于75kw包含内置制动单元,不具有内置制动单元的MM440和MM420可以使用外置制动单元;。
MM440_430特殊功能介绍

MM430/440 特殊功能介绍The introduction of special function in MM430/MM440关键词 旁路控制, 控制软化功能, 转矩控制Key Words(Bypass control, Droop, Torque control)A&D Service & Support Page 2-7A&D Service & SupportPage 3-7问:MM430/MM440有哪些特殊功能?答:旁路控制(P1260)通常在变频器故障或电机运行频率接近50hz 时,需要采用旁路控制,即电机在变频运转和工频运转之间转换。
采用旁路电路后,即可由变频器向电机供电, 也可以直接由电源向电机供电, 一般由变频器数字量输出控制切换两个机械上互相锁定的接触器运行切换条件可以自行选择,通常可由变频器故障信号,数字输入信号或某些特定条件切换。
电机循环起动控制在PID 控制方式下,变频器除自身所驱动的电机之外,可以最多再连锁控制三台辅助电机的运行。
各台辅助电机可以通过接触器或电机起动器投入运行,接触器和电机起动器的接通和断开由变频器的三个输出继电器控制,这一功能可广泛应用于风机和供水系统优化运行中。
当变频器运行在最大频率,且PID反馈信号表明系统需要达到更高的速度时,变频器按照事先设定的分级组合接通相应电机。
同时,为尽量减小对系统的冲击,变频器减小输出频率至最小值。
反之,当变频器运行在最小频率,且PID 反馈信号表明系统需要进一步降低速度时,变频器控制相应电机退出运行。
同样,为尽量减小对系统的冲击,变频器升高输出频率至最大值。
分级组合方式有多种,为保证分级控制的稳定,软件中采用滞环和延时功能,且都可以通过参数进行调节。
A&D Service & SupportPage 4-7断带检测用于检测传动部分的机械故障,例如皮带断裂,水泵缺水运行等。
西门子变频器MM440调试说明

0~10V, 0~20mA和-10~10V 0~10V, 0~20mA 继电器输出: 3个(DC30V/5A或AC250V/2A) 模拟输出: 2个(0/4~20mA) 通讯接口: RS485, RS232
2.5 对于一些特殊的应用场合,如高环境温度、高开关频率、高海拔高度等,此时会引 起变频器的降容,变频器需放大一档选择。
2.6 使用变频器控制高速电机时,由于高速电动机的电抗小,会产生较多的高次谐波。而 这些高次谐波会使变频器的输出电流值增加。因此,选择用于高速电动机的变频器时, 应比普通电动机的变频器稍大一些。
1.2 恒功率负载 机床主轴和轧机、造纸机、塑料薄膜生产线中的卷取机、开卷机等要求的转矩,大
体与转速成反比,这就是所谓的恒功率负载。负载的恒功率性质应该是就一定的速度 变化范围而言的。
当速度很低时,受机械强度的限制,TL 不可能无限增大,在低速下转变为恒转矩 性质。负载的恒功率区和恒转矩区对传动方案的选择有很大的影响。电动机在恒磁通 调速时,最大允许输出转矩不变,属于恒转矩调速;而在弱磁调速时,最大允许输出 转矩与速度成反比,属于恒功率调速。如果电动机的恒转矩和恒功率调速的范围与负 载的恒转矩和恒功率范围相一致时,即所谓“匹配”的情况下,电动机的容量和变频器 的容量均最小。
MM440 配置相关知识 :
熔断器的作用:
可靠保护半导体元器件(SITOR保护熔断器3NE1系列)
进线侧滤波器的作用:
降低变频器、逆变器、整流单元、整流/回馈单元等装置对电网的干扰
输出电抗器的作用:
降低容性电流和电压变化率dv/dt,用来补偿长导线情况下(屏蔽缆 >50m或非屏蔽缆>100m)的电容充电电流,减小对电机的冲击
MM440调试参数设置

MM4xx变频器参数设置MM420、MM430、MM440变频器参数设置基本相同,现在就以MM440变频器为例介绍设置方法:复位为出厂时变频器的缺省设置值1、设置P0010=30。
2、设置P0970=1。
提示:复位过程约需3 分钟才能完成第一步:电机参数设置将电机铭牌数据输入变频器内进行优化:为了能够查看变频器所有参数,我们先设置P0003=3 P0004=0 P0010=1 (进行快速调试)P0300设置电动机的类型 1为异步电动机 2为同步电动机P0304设置电动机的额定电压 VP0305设置电动机的额定电流 AP0307设置电动机的额定功率 KWP0310设置电动机的额定频率 HzP0311设置电动机的额定转速 r/minP3900=1 结束快速调试其它参数按工厂设置使参数复位此时P0003可能恢复到默认的1级(标准级)如还需要更改参数重新将P0003=3第二步:基本参数设置P0003=3 “专家级”保护级选择P0010=0 变频器工作方式选择,“0”运行,“1”调试,“30”恢复出厂参数P0100=0 电机标准选择默认50hzP0205=0 变频器控制方式“0”恒转矩控制,“1”变转矩控制P0300=1 电机类型“1”异步电机,“2”同步电机P0700=5 选择数字的命令信号源0 工厂的缺省设置1 BOP(键盘)设置2 由端子排输入4 BOP 链路的USS 设置5 COM链路的USS 设置6 COM链路的通讯板(CB)设置P701~p708=0 开关量输入端子DIN1~8功能定义“0”不使用该端子P1000=5 频率设定值的选择(本设置需根据实际情况)0 无主设定值1 MOP设定值2 模拟设定值3 固定频率4 通过BOP链路的USS 设定5 通过COM联路的USS 设定6 通过COM链路的CB设定P3900 结束快速调试0 不用快速调试1 结束快速调试,并按工厂设置使参数复位2 结束快速调试3 结束快速调试,只进行电动机数据的计算1、变频器接收PLC的字第一个字为控制字,第二个字为主设定值。
《2024年西门子MM440变频器微调PID的应用》范文

《西门子MM440变频器微调PID的应用》篇一一、引言随着工业自动化技术的不断发展,变频器作为现代工业控制系统中的关键设备,在电机调速和控制系统中发挥着越来越重要的作用。
西门子MM440变频器作为其中的佼佼者,具有高效率、高可靠性及出色的控制性能。
为了满足工业控制中对高精度调速的要求,微调PID(比例-积分-微分)控制策略被广泛应用于MM440变频器中。
本文将探讨西门子MM440变频器微调PID的应用,以及其在实际工业环境中的重要性。
二、MM440变频器简介西门子MM440变频器是一款高性能的交流电机驱动器,通过改变电机的电源频率和电压来实现电机转速的控制。
该变频器具备丰富的功能,如参数设定、运行监控和保护等,可以满足不同工业应用的需求。
此外,MM440变频器支持多种控制策略,其中微调PID控制是一种重要的控制方法。
三、微调PID控制原理微调PID控制是一种闭环控制系统,它根据偏差值(期望值与实际值之差)进行比例、积分和微分运算,得到控制量以调整执行机构的动作,从而实现对被控对象的精确控制。
在MM440变频器中,微调PID控制主要用于电机的速度和位置控制。
四、MM440变频器微调PID的应用1. 速度控制:在工业生产中,电机的速度控制至关重要。
通过微调PID控制策略,MM440变频器可以根据实际需求调整电机的转速,使其达到期望的转速值。
这种控制方式具有响应速度快、精度高的特点,可以满足各种复杂工艺的要求。
2. 位置控制:在某些自动化设备中,需要精确控制电机的位置。
通过微调PID控制,MM440变频器可以根据预设的位置值调整电机的运动轨迹,实现精确的位置控制。
这在实际应用中具有重要的意义,特别是在高精度的机床和机器人等领域。
3. 优化系统性能:通过微调PID参数,可以优化MM440变频器的性能,提高系统的稳定性和可靠性。
这不仅可以延长设备的使用寿命,还可以减少维护成本和停机时间,提高生产效率。
五、实际应用案例以某生产线上的输送机为例,采用MM440变频器配合微调PID控制策略后,输送机的速度和位置控制更加精确。
西门子MM420、MM430和MM440变频器选型和功能区别
西门子MM420、MM430和MM440变频器选型和功能
区别
西门子MM420、MM430和MM440变频器选型和功能主要区别如下,详细功能区别请参考选型手册。
MM420/MM440一般应用于恒转矩负载,MM430一般应用于变转矩负载;MM420/430/440的功率范围不同:
MM420:0.12~11kw;
MM430:7.5~250kw;
MM440:0.12~200kw。
I/O端子数量区别:MM430
MM420 有3个数字输入、1个数字输出、1路模拟输入和1路模拟输出
MM430 有6个数字输入、3个数字输出、2路模拟输入和2路模拟输出
MM440 有6个数字输入、3个数字输出、2路模拟输入和2路模拟输出
MM430具有应用于流体设备上的特殊功能,例如:分级控制、PID休眠功能、旁路功能等;
MM430操作面板上具有手动/自动切换按钮,MM420/440不具有该功
能。
MM420/430仅具有V/F控制,MM440不但具有V/F还具有矢量控制;MM420/430不具有制动单元,MM440小于等于75kw包含内置制动单元,不具有内置制动单元的MM440和MM420可以使用外置制动单元;。
MM440变频器介绍以及程序控制分析
MM440变频器介绍以及程序控制分析MM440变频器采用先进的开环矢量控制技术,具备良好的转矩响应和速度控制精度。
其功能强大且灵活,可以根据用户需求进行定制化配置。
同时,MM440变频器还具有过载保护、短路保护、无缓冲刹车、断电保护等多重保护功能,确保设备和工作人员的安全。
在程序控制方面,MM440变频器支持多种控制方式。
可以通过现场总线进行远程控制,如Profibus、Profinet等。
同时,MM440还支持自动化控制系统,如PLC控制和触摸屏操作。
用户可以根据实际需求,选择适合的控制方式。
在程序控制分析方面,MM440变频器的设计使得控制参数的修改相对简单。
用户可以通过触摸屏或PC软件进行参数设置和调整。
相比于传统的机械控制方式,MM440变频器实现了精确的数字化控制,能够更好地满足生产过程中对电机的控制要求。
此外,MM440变频器还具有故障诊断功能。
通过监测和记录设备的运行状态和故障信息,可以快速定位和解决故障。
这不仅提高了设备的可靠性和稳定性,还减少了故障对生产过程的影响。
总的来说,MM440变频器是一款性能卓越、功能强大的变频器。
在工业控制领域中,它能够实现高效的电机控制和调节,提高生产效率和产品质量。
通过程序控制和诊断功能,它帮助用户更好地监控和管理设备,确保生产过程的稳定性和安全性。
基于西门子MM420变频器的PID控制

基于西门子MM420变频器的PID控制在现代工业控制系统中,PID控制技术应用非常广泛。
然而,用实际的单闭环控制系统进行PID控制器参数整定的话,会存在一定的风险。
这篇文章介绍的是,通过使用西门子MM420变频器对PID单闭环控制系统进行模拟仿真实验,并用西门子MM420变频器进行参数的修改起到调节PID的作用。
综合的分析和判断调节参数,使PID单闭环控制系统得到较好的响应曲线。
标签:PID单闭环控制系统、参数设定、仿真一、PID控制原理PID控制就是比例(P)、积分(I)、微分(D)控制。
PID控制是闭环控制,是将传感器测得的反馈信号(实际信号)与被控量的给定目标信号进行比较,以判断是否已经达到预定的控制目标。
如果尚未达到预定目标值,则根据两者之间的差值进行调节,直到达到预定目标值为止,即根据系统的误差,利用比例、积分、微分计算出控制量进行控制。
特别适用于过程的动态性能良好而且控制性能要求不太高的情况。
PID控制,实际中也有PI和PD控制。
比例+积分+微分(PID)控制器能改善系统在调节过程中的动态特性。
P、PI、PD、PID控制的动态响应曲线对比如图1-2所示。
二、变频器PID控制在系统要求不高的控制中,微分功能D可以不用,因为反馈信号的每一点变化都被控制器的微分作用所放大,从而可能引起控制器输出的不稳定。
MM420的微分项D(P2274)乘上当前(采样)的反馈信号与上一个(采样)反馈信号之差,可以提高控制器对突然出现的误差的反应速度。
在系统反应太慢时,应调大KP(比例增益)P2280,或减小积分时间P2285;在发生振荡时,应调小KP (比例增益)P2280,或调大积分时间P2285。
MM420的PID控制可以选择7个目标值的PID控制,由數字输入端子DIN1~DIN3通过P0701~P0703设置实现多个目标值的选择控制。
每个目标值的PID参数值分别由P2201~P2207进行设置。
端子选择目标值的方式和7段速度控制的目标选择方式相同,分为直接选择目标值、直接选择目标值带ON命令、二进制编码选择目标值带ON命令。
SIEMENS MICROMASTER 420 430 440入门指南
SIEMENS MICROMASTER 420/430/440入门指南警告:注意和提示以下的“警告”、“注意”和“提示”是为了您的安全而提出的,是为了防止变频器或与其连接的部件受到损坏而采取的一些措施。
特殊的“警告”、“注意”和“提示”适用于特定的操作,放在有关章节的开始部分。
请您仔细阅读这些信息,因为它们为您提供了人身安全的保障,并且有助于延长变频器以及与之连接的设备的使用寿命。
Δ警告◆本设备带有危险电压,而且它所控制的是带有危险电压的转动机件,如果不遵守“警告”的规定,或不按本手册的要求进行操作,就可能会造成死亡,严重的人身伤害或重大的财产损失。
◆只有经过认证合格的专业人员才允许操作本设备,而且在使用设备之前要熟悉本手册中所有的安全说明和有关安装、操作和维护的规定,正确的进行搬运装卸,就位安装和操作维护,是实现本设备安全和成功地投入运行的可靠保证。
◆在电源电压切断5分钟以内,MICROMASTER变频器的直流上仍然带有危险电压,因此,切断变频器的供电电源5分钟以后,才允许接触MICROMASTER变频器的任何部分。
本设备可以按照UL508C(质量保证标准)第42节的要求,在变频器的内部提供电动机的过载保护功能。
请参看参数P0610(第3访问级)和P0335的说明。
电动机的过载保护功能也可以采用将外部PTC (正温度系数电阻)信号接到变频器的数字输入端来实现。
◆当采用带有延迟时间的H或K型熔断器作为保护器件时,本设备适用于回路对称容量不大于100,000安培(均方根值)的地方,最大电压为:-MM420=230V/460V-MM430=460V-MM440=230V/460V/575V◆连接导线只能采用1级,60/75°的铜线。
◆安装变频器时,有关固定螺丝的紧固扭距的规定请参看“操作说明书”的有关部分。
注意:在进行任何安装和调试之前,请你务必阅读以下的安全规则和警告,以及设备上粘贴的所有警示标志,确保警示标志置于醒目的地方,并更换已经脱落或损坏的标志。
西门子 MICROMASTER 410 420 430 440变频器 说明书

控制
过程控制 输入 输出 与自动化系统的接口 附加特点
线性 V/f 控制特性 多点设定的 v/f 控制特性 (可编程的 v/f 控制特性) FCC (磁通电流控制)
-
3 个数字输入 1 个模拟输入
MICROMASTER Eco & MIDIMASTER Eco 参考手册
MICROMASTER, MICROMASTER Vector MIDIMASTER Vector 拖动高达 90kW 交流电动机的各种变频器
低压电动机 (Low-Voltage Motors)
DA64 M11
自动化部件 (Components for Automation) CA01
订货时请与您当地的西门子办事处联系
本产品样本中包含的产品和系统是 根据 DQS 认证的质量管理体系按 照 DIN EN ISO9001 标准制造的 (认证注册编号:FM25845)。DQS 认证得到了所有 EQ Net 国家的承 认 (注册号:FM25845)
一般介绍
MICROMASTER 410 变频器
MICROMASTER 440 “适用于一切传动装置” 具有高级的矢量控制功能 (带有或不带编码器反馈),可用于多种部 门的各种用途,例如传送带系统,纺织机械,电梯,卷扬机以及建 筑机械等。
0.12 kW 至 250 kW 200 V 至 240 V,单相交流 200 V 至 240 V,三相交流 380 V 至 480 V,三相交流 500 V 至 600 V,三相交流
通用变频器应用资料: 1. 通用变频器驱动装置在化工企业搅拌机上的应用 2. 变频调速恒压供水在陕西兴平化肥厂的应用
plc控制mm420变频器
MM420变频器常用参数下面仅列出些常用的参数设置及其调试方法,更详细的说明请参阅相关手册。
P003--用户访问级:默认为1(标准级),笔者建议设置为4(维修级),这样才有访问所有参数的权限。
P004--参数过滤器:默认为0,就是无参数过滤功能,不隐藏参数,显示所有的参数。
P0307--电动机额定功率:按电动机额定功率设置,本参数只能在P0010=1(快速调试)时才可以修改。
P1000--选择频率设定值:默认为2,即模拟输入;如果选择12,则加上了MOP(电动电位计)的值。
P1040--MOP的设定值:可以把MOP理解为偏置频率。
P1080--最小频率:变频器输出的最小频率,根据电动机实际驱动能力而不同,建议15Hz 以上。
P1082--最大频率:变频器输出的最大频率,根据电动机实际驱动能力而不同,建议75Hz 以下。
P2000--基准频率:如果采用模拟输入来调节变频器频率,那么可能需要用到该参数,这是模拟输入最大值时的频率设定值。
例如,采用电位器调节频率,最大需要调节到75Hz(刚好75Hz),那么就要求P1082的值和P2000的值不得小于75Hz,至少有一个等于75Hz就可以了。
R0722--二进制输入:显示各个数字输入的状态。
都不动作时显示,数字输入动作时相应位变为1;例如当数字输入1动作时显示。
观察该参数,有利于分析故障情况。
下面是部分系统默认的参数:P0700选择命令源:缺省值为20工厂的缺省设置1BOP(键盘)设置2由端子排输入4通过BOP链路的USS设置5通过COM链路的USS设置6通过COM链路的通讯板(CB)设置P0701数字输入1的功能:缺省值为10禁止数字输入1ON/OFF1(接通正转/停车命令1)2ONreverse/OFF1(接通反转/停车命令1)3OFF2(停车命令2)-按惯性自由停车4OFF3(停车命令3)-按斜坡函数曲线快速降速停车9故障确认10正向点动11反向点动12反转13MOP(电动电位计)升速(增加频率)14MOP降速(减少频率)15固定频率设定值(直接选择)16固定频率设定值(直接选择+ON命令)17固定频率设定值(二进制编码的十进制数(BCD码)选择+ON命令)21机旁/远程控制25直流注入制动29由外部信号触发跳闸33禁止附加频率设定值99使能BICO(二进制互联连接)参数化P0702数字输入2的功能:缺省值为120禁止数字输入1ON/OFF1(接通正转/停车命令1)2ONreverse/OFF1(接通反转/停车命令1)3OFF2(停车命令2)-按惯性自由停车4OFF3(停车命令3)-按斜坡函数曲线快速降速停车9故障确认10正向点动11反向点动12反转13MOP(电动电位计)升速(增加频率)14MOP降速(减少频率)15固定频率设定值(直接选择)16固定频率设定值(直接选择+ON命令)17固定频率设定值(二进制编码的十进制数(BCD码)选择+ON命令)21机旁/远程控制25直流注入制动29由外部信号触发跳闸33禁止附加频率设定值99使能BICO参数化P0703数字输入3的功能:缺省值为90禁止数字输入1ON/OFF1(接通正转/停车命令1)2ONreverse/OFF1(接通反转/停车命令1)3OFF2(停车命令2)-按惯性自由停车4OFF3(停车命令3)-按斜坡函数曲线快速降速停车9故障确认10正向点动11反向点动12反转13MOP(电动电位计)升速(增加频率)14MOP降速(减少频率)15固定频率设定值(直接选择)16固定频率设定值(直接选择+ON命令)17固定频率设定值(二进制编码的十进制数(BCD码)选择+ON命令)21机旁/远程控制25直流注入制动29由外部信号触发跳闸33禁止附加频率设定值99使能BICO参数化P0704数字输入4的功能:缺省值为00禁止数字输入1ON/OFF1(接通正转/停车命令1)2ONreverse/OFF1(接通反转/停车命令1)3OFF2(停车命令2)-按惯性自由停车4OFF3(停车命令3)-按斜坡函数曲线快速降速停车9故障确认10正向点动11反向点动12反转13MOP(电动电位计)升速(增加频率)14MOP降速(减少频率)21机旁/远程控制25直流注入制动29由外部信号触发跳闸33禁止附加频率设定值99使能BICO参数化1:快速调试P0003:3P0010:1开始快速调试P0100:0选择工作地区P0300:1电动机类型P0304:380额定电动机电压P0305:额定电机电流P0307:电机额定功率P0308:电动机的功率因数P0310:50电动机的额定频率P0311:1450电动机的额定速度P0640:150电动机的过载因子P0700:1命令源P1000:1选择频率设定值P1120:1加速时间P1121:减速时间P130020变频器控制方式P3900:3开始电动机数据的自动检测(结束快速调试)MM420变频器数字量端口开关控制运行实验一、实验目的:1、了解MM420变频器数字量输入端口的功能及操作方法;2、掌握MM420变频器数字量输入端口开关控制运行的操作;3、进一步熟悉MM420变频器有关参数的设置方法。
实训指导书(西门子MM420变频器)全解

任务1 变频器的面板操作与运行任务目的:1. 熟悉变频器的面板操作方法。
2. 熟练变频器的功能参数设置。
3. 熟练掌握变频器的正反转、点动、频率调节方法。
任务引入:变频器MM420系列(MicroMaster420)是德国西门子公司广泛应用与工业场合的多功能标准变频器。
它采用高性能的矢量控制技术,提供低速高转矩输出和良好的动态特性,同时具备超强的过载能力,以满足广泛的应用场合。
对于变频器的应用,必须首先熟练对变频器的面板操作,以及根据实际应用,对变频器的各种功能参数进行设置。
相关知识点:一.变频器面板的操作利用变频器的操作面板和相关参数设置,即可实现对变频器的某些基本操作如正反转、点动等运行。
变频器面板的介绍及按键功能说明详见本书任务1.4变频器的调试,具体参数号和相应功能参照系统手册。
二.基本操作面板修改设置参数的方法MM420在缺省设置时,用BOP控制电动机的功能是被禁止的。
如果要用BOP 进行控制,参数P0700应设置为1,参数P1000 也应设置为1。
用基本操作面板(BOP)可以修改任何一个参数。
修改参数的数值时,BOP有时会显示“busy”,表明变频器正忙于处理优先级更高的任务。
下面就以设置P1000=1的过程为例,来介绍通过基本操作面板(BOP)修改设置参数的流程,见表2-1。
表2-1 基本操作面板(BOP)修改设置参数流程操作步骤BOP显示结果1按键,访问参数2按键,直到显示P10003按键,直到显示in000,即P1000的第0组值4按键,显示当前值25按键,达到所要求的值16按键,存储当前设置7按键,显示r00008按键,显示频率任务训练 :一、训练内容通过变频器操作面板对电动机的启动、正反转、点动、调速控制。
二、训练工具、材料和设备西门子MM420变频器、小型三相异步电动机、电气控制柜、电工工具(1套)、连接导线若干等。
三、操作方法和步骤1.按要求接线系统接线如图2-1所示,检查电路正确无误后, 合上主电源开关QS 。
《2024年西门子MM440变频器微调PID的应用》范文
《西门子MM440变频器微调PID的应用》篇一一、引言随着工业自动化程度的不断提高,变频器在各种工业生产中得到了广泛应用。
其中,西门子MM440变频器以其出色的性能和稳定性受到了广大用户的青睐。
为了更好地满足工业生产过程中的控制需求,本文将探讨西门子MM440变频器微调PID(比例-积分-微分)控制的应用。
二、西门子MM440变频器概述西门子MM440变频器是一款高性能的变频器,具有优异的调速性能和稳定性。
它广泛应用于各种电机驱动系统中,如风机、水泵、压缩机等。
通过改变电源的频率和电压,MM440变频器可以实现对电机转速的精确控制,从而达到节能、提高生产效率的目的。
三、PID控制原理PID控制是一种广泛应用于工业控制领域的控制算法。
它通过比例(P)、积分(I)和微分(D)三个环节的组合,实现对系统误差的快速响应和消除。
在变频器控制系统中,PID控制主要用于调节电机的转速,使其达到设定值。
四、MM440变频器微调PID的应用在工业生产过程中,为了提高电机的运行精度和稳定性,often需要对MM440变频器的PID参数进行微调。
微调PID的过程主要是通过调整PID控制的比例增益、积分时间和微分时间等参数,以达到更好的控制效果。
1. 参数设定与调整根据实际的生产需求和电机的特性,对MM440变频器的PID参数进行设定。
一般来说,首先需要根据电机的实际负载和运行环境确定合适的比例增益和积分时间。
然后,通过观察系统的响应情况,对微分时间进行调整,以实现对系统误差的快速响应和消除。
在调整过程中,需要注意观察系统的稳定性和响应速度,以达到最佳的平衡点。
2. 微调方法与步骤(1)首先,根据电机的实际负载和运行环境,设定一个初步的PID参数值。
(2)然后,观察系统在运行过程中的响应情况,包括转速的稳定性和波动情况等。
(3)根据观察结果,逐步调整比例增益、积分时间和微分时间等参数,以实现对系统误差的快速响应和消除。
MM420变频器的多段速控制功能及参数设置
任务1 变频器的面板操作与运行
操作步骤 1
按 键,访问参数 2
按 键,直到显示 P1000 3
按 键,直到显示 in000,即 P1000 的第 0 组值
4 按 键,显示当前值 2
5 按 键,达到所要求的值 1
6 按 键,存储当前设置
7 按 键,显示 r0000
8 按 键,显示频率
BOP 显示结果
第十二页,编辑于星期二:二十一点 五十六分。
任务4 变频器的多段速运行操作
MM420变频器的多段速控制功能及参数设置
多段速功能,也称作固定频率,就是设置参数P1000=3的条件下,用开关
量端子选择固定频率的组合,实现电机多段速度运行。
1. 直接选择(P0701 - P0703 = 15)
端子编号 5 6 7
对应参数 P0701 P0702 P0703
ON/OFF1(接通正转、停车命令1)
ON/OFF1(接通反转、停车命令1)
OFF2(停车命令2),按惯性自由停车
OFF3(停车命令3),按斜坡函数曲线快
速降速
故障确认
正向点动
反向点动
反转
MOP(电动电位计)升速(增加频率)
MOP降速(减少频率)
固定频率设定值(直接选择)
固定频率设定值(直接选择+ON命令)
任务3 变频器的模拟信号操作控制
参数设置
(1)恢复变频器工厂默认值,设定P0010=30和 P0970=1,按下P键,开始复位。
第二十四页,编辑于星期二:二十一点 五十六 分。
任务3 变频器的模拟信号操作控制
参数设置
(2)设置电动机参数
第二十五页,编辑于星期二:二十一点 五十六 分。
MM420,MM440闭环PI控制

显示订货号附件文档为用户提供了PDF_Using_PI_Control_App_cn_V1_1b_5d.pdf ( 438 KB )PI closed-loop control for MM420 / MM440Display part number6SE6420.. MICROMASTER 420 - 0.12KW - 11KW6SE6440.. MICROMASTER 440 - 0.12KW - 250KWQUESTION:What information is available about the PI control of the MM420 and the PID control of theMM440?ANSWER:MM420A PI controller is integrated in the MM420. This can be activated by the user so that closed-loop control with feedback can be used. If the PI controller was activated (P2200) it internally generates the motor frequency that is necessary to minimize the difference (error) between the PI setpoint and the PI feedback. This is realized by continuously comparing the feedback signal with thePDF_Using_PI_Control_App_en_V1_1b_en.pdf传动技术:常见问题ID: 6440806担保、责任与支持我们对本文档内包含的信息不承担任何责任。
不论基于何种法律原因,对由于使用本应用示例中的示例、信息、程序、工程组态和性能数据等引起的后果概不承担任何索赔责任。
关于M440和M420变频器常用经典知识

关于M440和M420变频器常用经典知识MM4所允许的最长电机电缆长度是多少?回答:对MM420和MM440,在无输出电抗器和有输出电抗器时所允许的最长电机电缆长度如下:A、无输出电抗器时,如果使用屏蔽电缆,最长电机电缆长度一般不要超过50米;如果使用非屏蔽电缆,最长电机电缆长度不能超过100米。
B、有输出电抗器时,如果使用屏蔽电缆,最长电机电缆长度一般不要超过200米;如果使用非屏蔽电缆,最长电机电缆长度不能超过300米。
问题:什么是快速电流限幅(FCL)?回答:快速电流限幅(FCL)是周期性的将实际电流限幅集成在变频器中,而其限幅值设置比软件中设定的过流跳闸值略微低一点而且响应更快,这样就避免了突然加载或快速升速时的误动和不必要的跳闸。
电流波形如下所示:问题: MM420的左转和右转命令同以前的产品相比较是否一致?回答: MM420的左转和右转命令同以前的产品相比较,其基本功能完全相同,但也存在一些区别。
如下图所示,当变频器在减速过程中有一个左转命令,则此命令被忽略,若想要变频器左转,工作时序是使用反转命令或当变频器停止后,再给出一个左转命令。
问题:如何使用MM420的直流制动功能?回答:可以通过设置参数P1230,P1232和P1233来使用MM420的直流制动功能。
具体说明如下:P1230-直流制动功能使能P1233-设置在OFF1命令后直流制动的持续时间P1232-设置直流制动电流的大小问题: MM4对参数P1210的不同设定值是如何响应的?回答:参数P1210用于设置变频器在主电源跳闸或在发生故障后允许变频器重新起动。
具体设定值及功能请参见MM4操作手册说明。
问题: MM4常见问题回答: 1:BOP操作面板的"P"键不能正常工作。
检查变频器是否工作在"Function"模式。
2:无法修改电机参数。
电机参数只能在快速调试模式(P0010=1)下才能修改。
MM420变频器控制面板操作
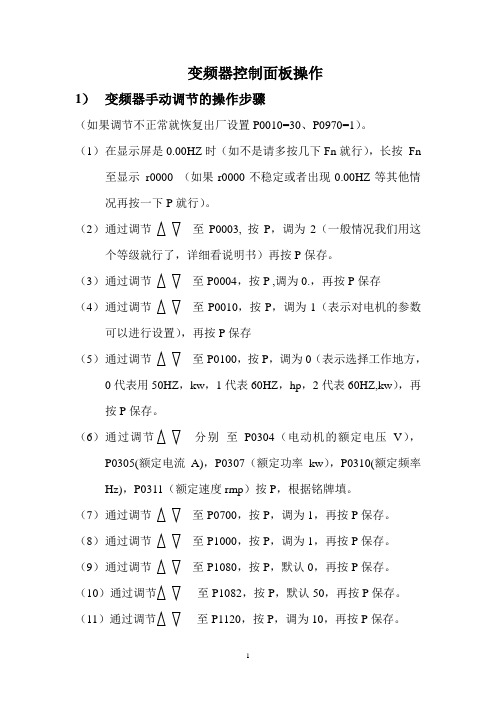
变频器控制面板操作1)变频器手动调节的操作步骤(如果调节不正常就恢复出厂设置P0010=30、P0970=1)。
(1)在显示屏是0.00HZ时(如不是请多按几下Fn就行),长按Fn 至显示r0000 (如果r0000不稳定或者出现0.00HZ等其他情况再按一下P就行)。
(2)通过调节至P0003, 按P,调为2(一般情况我们用这个等级就行了,详细看说明书)再按P保存。
(3)通过调节至P0004,按P ,调为0.,再按P保存(4)通过调节至P0010,按P,调为1(表示对电机的参数可以进行设置),再按P保存(5)通过调节至P0100,按P,调为0(表示选择工作地方,0代表用50HZ,kw,1代表60HZ,hp,2代表60HZ,kw),再按P保存。
(6)通过调节分别至P0304(电动机的额定电压V),P0305(额定电流A),P0307(额定功率kw),P0310(额定频率Hz),P0311(额定速度rmp)按P,根据铭牌填。
(7)通过调节至P0700,按P,调为1,再按P保存。
(8)通过调节至P1000,按P,调为1,再按P保存。
(9)通过调节至P1080,按P,默认0,再按P保存。
(10至P1082,按P,默认50,再按P保存。
(11至P1120,按P,调为10,再按P保存。
(12至P1121,按P,调为10,再按P保存。
(13至P3900,按P,调为1,再按P保存。
这时候会出现P---- 表示在处理。
然后再长按Fn,等屏幕变化,屏幕变换后再按三下Fn就回到0.00HZ调整完毕。
注:想要手动调节频率在变频器按下后,长按Fn,出现r0000,再按下P就可以实现变频了。
2)变频器自动调节的操作步骤(1)在显示屏是0.00HZ时(如不是请多按几下Fn就行),长按Fn 至显示r0000 (如果r0000不稳定或者是出现0.00HZ等其他情况再按一下P就行)。
(2)通过调节至P0010,保证它的值为0(3)通过调节至P0700,按P,调为2,再按P保存。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
传动技术:常见问题ID: 6440806担保、责任与支持我们对本文档内包含的信息不承担任何责任。
不论基于何种法律原因,对由于使用本应用示例中的示例、信息、程序、工程组态和性能数据等引起的后果概不承担任何索赔责任。
一旦发生故意损伤、重大过失、人身/健康伤害、产品质保、欺诈隐瞒缺陷或违反合同基本原则等情况(“wesentliche Vertragspflichten”),那么这类免责声明将不适用于强制性责任,如德国产品责任法(German Product Liability Act,“Produkthaftungsgesetz”)。
然而,因违反合同基本原则而造成的索赔应限于合同规定的可预见损坏,除非是由故意、重大过失或基于人身/健康伤害的强制性责任引起的。
上述条款并没有暗示对提供损坏证明的责任有所修改。
Copyright© Copyright-2006 Siemens A&D。
未经Siemens A&D 书面授权,不得转让、复制或摘录这些应用示例。
C o p y r i g h t © S i e m e n s A G 2007 A l l r i g h t s r e s e r v e d P D F _U s i n g _P I _C o n t r o l _A p p _c n _V 1_5d .d o c 如果您有关于该文档的任何建议,请发送至下列电子邮箱: mailto:sdsupport.aud@ID: 6440806目录目录 (3)范例描述 (4)1 什么是闭环控制? (4)2 MM420闭环控制实现....................................................................................5 2.1 设置PI 控制器 (5)读取PI 参数 (5)使能PI 控制 (5)PI 反馈信号 (5)PI 设定值 (6)PI 设定值斜坡时间 (6)PI 控制器的比例系数和积分时间常数 (6)C o p y r i g h t © S i e m e n s A G 2007 A l l r i g h t s r e s e r v e d PD F _U s i n g _P I _C o n t r o l _A p p _c n _V 1_5d .d o c齐格勒-尼柯尔斯优化方法 (8)PI 输出限制 (10)深入特性 (10)3 MM440闭环控制实现..................................................................................11 2个模拟量输入. (11)PID 自整定(自动优化) (11)微分时间常数 (11)PID 输出作为频率设定值微调信号..............................................................12 附录..............................................................................................................................13 4参考................................................................................................................13 4.1参考数据........................................................................................................13 4.2网络链接数据................................................................................................13 4.3 历史记录.. (14)请参考自动化与驱动技术支持与服务本文出自自动化与驱动集团技术支持的应用部分,可以通过以下链接下载该文档:/WW/view/en/6440806Beitrags-ID: 6440806范例描述范例为用户提供了在MM4中实现PI/PID 控制器的基本信息,并说明了如何设置PI/PID 控制器:核心内容如下:• MM420闭环PI 控制实现• MM440闭环PID 控制实现1 什么是闭环控制?工业场合中闭环控制有着广泛的应用。
虽然控制工程学是一个复杂的题目,但是简单的闭环控制是把反馈值(如现场的温度、压力、速度等信号)与期望值或者设定值(如经常手动设定)作比较,然后导出它们的差值信号。
差值信号经过处理后去控制变频器和电机,闭环控制的目的就是减少该差值。
因为系统滞后,所以差值信号的处理非常复杂。
通常采用比例增益和积分时间常数构成的PI 控制器来处理这个差值信号,它能够优化系统的性能和稳定性。
系统一旦设定了PI 闭环控制功能,就可以实现稳定的、高效的精确控制。
C o p y r i g h t © S i e m e n s A G 2007 A l l r i g h t s r e s e r v e d PD F _U s i n g _P I _C o n t r o l _A p p _c n _V 1_5d .d o cBeitrags-ID: 64408062 MM420闭环PI 控制实现用户可以使能MM420内置的PI 控制器作闭环控制。
一旦使能了PI 控制器(P2200:PI 使能参数),则闭环PI 控制器的输出调节变频器输出频率使PI 设定值和PI 反馈值之间的差值最小,通过连续比较反馈值和设定值并使用PI 控制器决定电机的频率。
通常的频率设定值P1000和斜坡时间P1120&P1121则自动失效,而设定的输出最大和最小频率设定(P1080&P1082)仍然有效。
2.1 设置PI 控制器读取PI 参数PI 参数的范围是P2200~P2294。
对于大多数应用来说,扩展级的参数(Lever 2)足够用于设置PI 控制器 的参数。
读取PI 控制器的参数,参数过滤设置如下: C o p y r i g h t © S i e m e n s A G 2007 A l l r i g h t s r e s e r v e d P D F _U s i n g _P I _C o n t r o l _A p p _c n _V 1_5d .d o cP0003 = 2 P0004 = 22 使能PI 控制 P2200为PI 控制器使能参数。
长期使能方法是把P2200设置为1,也可以通过数字输入端子(或者BICO 功能)使能PI 控制器,例如设置数字输入端子2使能PI 控制器,设置的参数为P0702=99,P2200=722.1。
变频器不运行时用户可以用它在频率控制和PI 控制之间作切换。
PI 反馈信号PI 控制需要现场的反馈信号来监控系统的运行情况,对于大多数应用来说,反馈信号是传感器输出的模拟信号。
MM420有一个模拟量输入端子,端子号是3&4,反馈信号可以连接到该输入端子。
PI 控制器反馈信号源的定义方法是把P2264设置为755(PI 反馈信号源为模拟输入1)。
如果模拟量输入需要标定,则需设置参数P0757~P0760的值。
如果使用不同的反馈信号源(例如USS 通信),则需要正确设置参数P2264的值。
反馈信号值的大小由参数r2266监控。
Beitrags-ID: 6440806在这点上需要定义传感器信号和PI 控制器改变电机频率模式之间的关系,参数P2271(PI 变送器类型)就说明了这一点。
P2271有两个可能设置的值,即0和1,0和1的区别是当设定值和反馈值之间的差值为正时(例如反馈信号值小于设定值)PI 控制器的输出是增加频率还是减少输出频率,参数P2271详细描述了应用中如何正确设置参数。
PI 设定值PI 控制器通过比较实际系统状态(由反馈信号知)和期望的系统状态来控制变频器的输出频率,设定值定义了期望系统状态,参数P2253为设定值源。
MM420只有一个模拟量输入,多数情况下它用作反馈信号,因此使用内部的数字作为设定值。
有两种方法可以设定,一种是固定PI 设定,另一种是键盘(电动电位计)设定。
需要指出的是这个值是百分比而不是频率,而变频器的运行频率是由设定值与反馈信号值之间的差值经过PI 调节决定的。
a. P2253 = 2224:“固定PI 设定值”,它选择二进制信号或者数字输入来设定参数P2201~P2207,则最多可定义7个设定值,使用手册中参数P2201描述了固定PI 设定不同的选择方法。
C o p y r i g h t © S i e m e n s A G 2007 A l l r i g h t s r e s e r v e d P D F _U s i n g _P I _C o n t r o l _A p p _c n _V 1_5d .d o cb. P2253 = 2250 “键盘(电动电位计)设定值”,它允许用户在参数P2240中设定一个固定值。
可以由面板上的按键或者由数字输入端子(例如:P0702=13“增加”和P0703=14“减少”)来增加或减少设定值。
PI 设定值斜坡时间当P2200使能PI 控制器时,正常频率的斜坡上升时间和下降时间(P1120和P1121)将被旁路。
PI 设定值有自己的斜坡时间P2257和P2258,它允许PI 设定值按照斜坡时间变化。
当PI 设定值改变或者发出启动命令时,则斜坡上升时间P2257激活,只有PI 设定值改变后斜坡下降时间P2258才有效。
P1121设定OFF1命令的斜坡下降时间,P1135设定OFF3命令的斜坡下降时间。
PI 控制器的比例系数和积分时间常数用户通过调节比例系数P2280和积分时间常数P2285来调整PI 控制器的性能以适应现场过程的需要。
过程的要求将决定最佳类型的响应,包括从带超调的快速恢复响应到阻尼响应。
通过调节P 和I 参数可以实现不同类型的响应。
Beitrags-ID: 6440806例如:下图表明在压力控制系统中不同类型的响应是如何随5%的PI 设定值而变化的。
曲线反映的是PI 反馈信号,1V 对应10%,设定不同的P2280和P2285可以得到不同的响应。