基于Android平台的GPIO操控方法
Android驱动开发实例(控制LED灯)(精)

Android驱动例子(LED灯控制)本例子,讲述在Android2.1上完全自已开发一个驱动去控制硬件口并写应用测试该驱动,通过这样一个例子,解析android下的驱动开发流程的应用调用流程,可以说是很好的入门引导要达到的效果:通过Android的应用,调用驱动程序,在开发板上控制4个LED的亮灭。
一、硬件原理如上图,通过4个IO口控制这LED,低电平LED亮,这4个IO口分别是GPM1, GPM2, GPM3, GPM4,二、驱动程序1、在kernel文件夹下的driver目录,新键驱动文件夹# cd kernel_Android_2.6.28.6/drivers进到开发板的kernel目录,建驱动文件夹#mkdir ledtest2、在/driver/ledtest目录下,新建leddriver.c ,leddriver.h , Kconfig, Makefile 等4个文件leddriver.c1. #include2. #include3. #include4. #include/* For __init/__exit/... */5. #include6. #include7. #include8. #include9. #include10. #include11. #include12. #include13. #include14. #include15. #include16. #include17. #include//for register_chrdev(18. #include19. #include20. #include"leddriver.h"21. #include/* For MODULE_ALIAS_MISCDEV22. (WATCHDOG_MINOR */23. #include/* For the watchdog specific items */24. #include/* For file operations */25. #define Viberator_MAJOR 97 //?÷éè±?o?26. #define SCULL_NR_DEVS 427. #define SCULL_QUANTUM 400028. #define SCULL_QSET 100029. //---do as the GIO driver30. #define DEVCOUNT 431. #define GIO_MINOR 2 /* GIO minor no. */32. static dev_t dev; //éê ?? μ?μ??÷ éè±? o?33. static struct cdev *cdev_p;34. static int openCnt;35. //--è±?á?------------36. int VIB_major = 97;//we asigment it for test37. int VIB_minor = 0;38. int VIB_nr_devs = SCULL_NR_DEVS;39. int VIB_quantum = SCULL_QUANTUM;40. int VIB_qset = SCULL_QSET;41.42. static struct class *vib_dev_class;43. #define GPNCON S3C64XX_GPNCON44. #define GPNDAT S3C64XX_GPNDAT45. #define GPNPUD S3C64XX_GPNPUD46. #define GPMCON S3C64XX_GPMCON47. #define GPMDAT S3C64XX_GPMDAT48. #define GPMPUD S3C64XX_GPMPUD49.50. #define VIB_ON 0x1151. #define VIB_OFF 0x2252. static const struct file_operations GPIO_Viberator_ctl_ops={53. .owner = THIS_MODULE,54. .open = GPIO_VIB_open,55. .read =GPIO_VIB_read,56. .write =GPIO_VIB_write,57. .ioctl = GPIO_VIB_ioctl,58. .release =GPIO_VIB_release,59. };60. ssize_t GPIO_VIB_read(struct file * file,char * buf,size_t count,loff_t * f_ops61. {62. printk(" GPIO_VIB_read \r\n";63. gpio_direction_output(S3C64XX_GPM(3, 0;//64. return count ;65. }66. ssize_t GPIO_VIB_write (struct file * file,const char * buf, size_tcount,loff_t * f_ops67. {68. printk(" GPIO_VIB_write \r\n";69. gpio_direction_output(S3C64XX_GPM(3, 1;//70. return count;71. }72.73. //ssize_t GPIO_VIB_ioctl(struct inode * inode,struct file * file,unsigned int cmd, long data74. static int GPIO_VIB_ioctl(struct inode *inode, struct file *file, unsigned int cmd, unsigned long arg75. {76. printk(KERN_ERR"VIB:GPIO_VIB_ioctl --CMD=%x \n",cmd;77. switch(cmd78. {79. case VIB_ON:80. gpio_direction_output(S3C64XX_GPM(1, 0;//81. gpio_direction_output(S3C64XX_GPM(2, 0;//82. gpio_direction_output(S3C64XX_GPM(3, 0;//83. gpio_direction_output(S3C64XX_GPM(4, 1;//84. printk(KERN_ERR"VIB:GPIO_VIB_ioctl --VIB_ON\n";85. break;86. case VIB_OFF:87. {88. printk(KERN_ERR"VIB:GPIO_VIB_ioctl --VIB_OFF\n";89. gpio_direction_output(S3C64XX_GPM(1, 1;//90. gpio_direction_output(S3C64XX_GPM(2, 1;//91. gpio_direction_output(S3C64XX_GPM(3, 1;//92. gpio_direction_output(S3C64XX_GPM(4, 0;//93. break;94. }95. default:break;96.97. }98. //gpio_free(S3C64XX_GPN(7;99. }100. ssize_t GPIO_VIB_open(struct inode * inode,struct file * file 101. {102. //?£?éêy103. //MOD_INC_USE_COUNT;104. printk("GPIO_VIB_open( \n";105. return 0;106. }107. ssize_t GPIO_VIB_release(struct inode * inode, struct file * file 108. {109. // MOD_DEC_USE_COUNT;//?£?éêy??110. printk("GPIO_VIB_release( \n";111. return 0;112. }113. static int GPIO_VIB_CTL_init(void114. {115. int ret = -ENODEV;116. int error ;117. printk("---------------------------------------------- \r\n"; 118. //3?ê??ˉú119. s3c_gpio_cfgpin(S3C64XX_GPM(1, S3C_GPIO_SFN(1;//GPM1 output 120. s3c_gpio_cfgpin(S3C64XX_GPM(2, S3C_GPIO_SFN(1;//GPM2 output 121. s3c_gpio_cfgpin(S3C64XX_GPM(3, S3C_GPIO_SFN(1;//GPM3 output 122. s3c_gpio_cfgpin(S3C64XX_GPM(4, S3C_GPIO_SFN(1;//GPM4 output 123. #if 1 /*?2ì?·?ê?×¢2á?y?ˉ*/124. ret = register_chrdev(Viberator_MAJOR, "viberator",&GPIO_Viberator_ctl_ops;125. if (ret < 0 {126. printk(KERN_ERR "VIB: unable to get major %d\n", ret;127. return ret;128. }129. //′′?¨\uc1class130. vib_dev_class = class_create(THIS_MODULE, "viberator";131. if (IS_ERR(vib_dev_class {132. unregister_chrdev(Viberator_MAJOR, "capi20";133. return PTR_ERR(vib_dev_class;134. }135. //′′?¨?úμ?£?136. device_create(vib_dev_class, NULL, MKDEV(Viberator_MAJOR, 0, NULL, "vib"; 137. // create a point under /dev/class/vib138. //í¨1yéaá?2?£??y?ˉ?ó??oó£??í?á?ú/dev/class/éú3é\uc1vib?úμ?£?ó|ó?3ìDò?éò2ù×÷tù2ù×÷?aúμ?£?í¨1y\uc1open ,write,read μèoˉêy2ù×÷£??ê?é?éò??′oó??μ?ó|ó?ê?ày3ìDò?£139. return 0;140. #endif141. #if 0/* ×¢2á?ˉì?*/142. if ((error = alloc_chrdev_region(&dev, 0, DEVCOUNT, "vibrate" < 0143. {144. printk(KERN_ERR145. "VIB: Couldn't alloc_chrdev_region, error=%d\n",146. error;147. return 1;148. }149. printk("dev = %d \n",dev;150. cdev_p = cdev_alloc(;151. cdev_p->ops = &GPIO_Viberator_ctl_ops;152. error = cdev_add(cdev_p, dev, DEVCOUNT;153. if (error {154. printk(KERN_ERR155. "VIB: Couldn't cdev_add, error=%d\n", error;156. return 1;157. }158.159. vib_dev_class = class_create(THIS_MODULE, "vib-dev";160. if (IS_ERR(vib_dev_class {161. res = PTR_ERR(vib_dev_class;162. goto out_unreg_class;163. }164. return 0;165. #endif166. out_unreg_class:167. class_destroy(vib_dev_class;168. return 1;169. }170.171. static int __init S3C6410_VIB_init(void172. {173. int ret = -ENODEV;174. //μ÷ó?oˉêy175. printk(KERN_ERR "Auly: S3C6410_VIB_init---\n";176. ret = GPIO_VIB_CTL_init(;177. if(ret178. {179. printk(KERN_ERR "Auly: S3C6410_VIB_init--Fail \n"; 180. return ret;181. }182. return 0;183. }184. static void __exit cleanup_GPIO_VIB(void185. {186. //×¢?úéè±?187. // devfs_unregister_chrdev(Viberator_MAJOR,"gpio_vib_ctl";188. #if 0189. cdev_del(cdev_p;190. unregister_chrdev_region(dev, DEVCOUNT;191. class_destroy(vib_dev_class;192. #endif193. device_destroy(vib_dev_class, MKDEV(Viberator_MAJOR, 0;194. class_destroy(vib_dev_class;195. unregister_chrdev(Viberator_MAJOR, "viberator";196. }197. MODULE_LICENSE("GPL";198. MODULE_DESCRIPTION("Peter first driver";199. MODULE_ALIAS_CHARDEV(Viberator_MAJOR, 0;200.201. module_init(S3C6410_VIB_init;202. module_exit(cleanup_GPIO_VIB;leddriver.h文件1. ssize_t GPIO_VIB_read(struct file * file,char * buf,size_t count,loff_t * f_ops;2. ssize_t GPIO_VIB_write (struct file * file,const char * buf, size_t count,loff_t * f_ops;3. static int GPIO_VIB_ioctl(struct inode *inode, struct file *file, unsigned int cmd, unsigned long arg;4. ssize_t GPIO_VIB_open(struct inode * inode,struct file * file;5. ssize_t GPIO_VIB_release(struct inode * inode, struct file * file;6. static int GPIO_VIB_CTL_init(void;Kconfig 文件1. config LEDTEST2. tristate "LED test for ARMeasy"3. default n4. help5. this is a LED driver for ARMEASY with S3C6410Makefile文件1. obj-$(CONFIG_LEDTEST+=leddriver.o3、在内核配置里菜单里加入本驱动的配置项达到的效果是,可以通过内核配置来选择是否把本驱动编译进内核里,也就是出现在make menuconfig 后出来的界面里,可以参考9.8章<Android添加新驱动方法>1)在arch/arm/Kconfig文件里 menu "Device Drivers"与 endmenu之间添加1. source "drivers/ledtest/Kconfig"2)在drivers/Kconfig menu "Device Drivers" 和 endmenu之间添加1. source "drivers/ledtest/Kconfig"3修改/drivers/Makefile文件1. Obj-$(CONFIG_LEDTEST +=ledtest/4、编译驱动在kernel目录下,终端输入1. #make menuconfig“Device Drivers” 下面会看到“LED test for ARMeasy”,选择它,保存并退出1. #make这样,就会在/drivers/ledtest目录下得到leddrivr.ko文件,它就是驱动目标文件,已级编译进了zImage 里了,只要用这个kernel烧录到开发板,开机就会自动加载本驱动,PS,如果发现如上编译,没有在ledtest目录下生成leddriver.ko文件,也就是本根没有去编译本驱动,那就把ledtest目录入到/drivers/misc目录下,相应的修改misc下面,然后,在makefile里,不用选直接写成obj-y += leddriver.o,这样强制的包含进去编译。
gpio操作
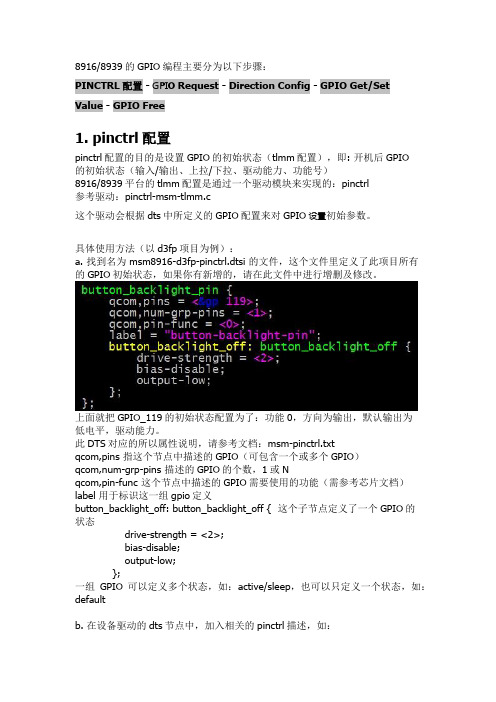
8916/8939的GPIO编程主要分为以下步骤:PINCTRL配置 - GPIO Request - Direction Config - GPIO Get/SetValue - GPIO Free1. pinctrl配置pinctrl配置的目的是设置GPIO的初始状态(tlmm配置),即: 开机后GPIO的初始状态(输入/输出、上拉/下拉、驱动能力、功能号)8916/8939平台的tlmm配置是通过一个驱动模块来实现的:pinctrl参考驱动:pinctrl-msm-tlmm.c这个驱动会根据dts中所定义的GPIO配置来对GPIO设置初始参数。
具体使用方法(以d3fp项目为例):a. 找到名为 msm8916-d3fp-pinctrl.dtsi 的文件,这个文件里定义了此项目所有的GPIO初始状态,如果你有新增的,请在此文件中进行增删及修改。
上面就把GPIO_119的初始状态配置为了:功能0,方向为输出,默认输出为低电平,驱动能力。
此DTS对应的所以属性说明,请参考文档:msm-pinctrl.txtqcom,pins 指这个节点中描述的GPIO(可包含一个或多个GPIO)qcom,num-grp-pins 描述的GPIO的个数,1或Nqcom,pin-func 这个节点中描述的GPIO需要使用的功能(需参考芯片文档)label 用于标识这一组gpio定义button_backlight_off: button_backlight_off { 这个子节点定义了一个GPIO的状态drive-strength = <2>;bias-disable;output-low;};一组GPIO可以定义多个状态,如:active/sleep,也可以只定义一个状态,如:defaultb. 在设备驱动的dts节点中,加入相关的pinctrl描述,如:其中:pinctrl-names 定义了这个设备驱动涉及到的gpio配置名,这个例子中只有一个配置:defaultpinctrl-0 定义了第一个配置的phandle(指向前面一步所定义的某个gpio状态)如果这个设备驱动涉及到多个gpio配置,则还可以有pinctrl-1, pinctrl-2 。
GPIO的设置与使用

T D _s i mo nGPIO的设置与使用STM32开发板拿来几个月了,自学也学了好几次,都没坚持下来,这次下决心了,一定要把这块骨头啃掉!自学的同时把笔记记下来,也有一种成就感。
顺便与大家分享,如发现错误或不合适的地方请不吝赐教。
QQ:859054503从头再来一次,找到了一个白算不错的例程ALIENTEK MiniSTM32开发板例程-库函数版本,跟着学习。
移植的ALIENTEK MiniSTM32开发板例程-库函数版本的例程。
我的开发板PA1---->LED0,PA2---->LED1,先修改使其工作。
__LED_H中需调用void LED_Init(void);//初始化一、端口初始化的内容1.定义一个GPIO_InitTypeDef型的结构体GPIO_InitStructure;GPIO_InitTypeDef GPIO_Instrcture;2.使能端口时钟,打开外设的输出时钟端口RCC_APB2periphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//第一个参数确定I/O口,第二个确定状态ENABLE或DISABLE原函数void RCC_APB2PeriphClockCmd(uint32_t RCC_APB2Periph, FunctionalState NewState) { /* Check the parameters */assert_param(IS_RCC_APB2_PERIPH(RCC_APB2Periph)); //声明变量assert_param(IS_FUNCTIONAL_STATE(NewState));if (NewState != DISABLE){RCC->APB2ENR |= RCC_APB2Periph;}else{RCC->APB2ENR &= ~RCC_APB2Periph;}}3.配置管脚T D _s i mo nGPIO_Instrcture->Pin=GPIO_Pin_1;GPIO_Instrcture->Pin=GPIO_Pin_2;4.配置管脚的输入、输出方式GPIO_Instrcture->GPIO_Mode=GPIO_Out_PP;typedef enum{GPIO_Mode_AIN = 0x0, //模拟输入模式GPIO_Mode_IN_FLOATING = 0x04, //浮空输入模式(复位后的初始状态) GPIO_Mode_IPD = 0x28, //下拉输入GPIO_Mode_IPU = 0x48, //上拉输入GPIO_Mode_Out_OD = 0x14, //漏极输出模式GPIO_Mode_Out_PP = 0x10, //推挽输出GPIO_Mode_AF_OD = 0x1C, //复用漏极输出模式GPIO_Mode_AF_PP = 0x18 //复用推挽输出模式}GPIOMode_TypeDef;5.配置管脚的输入输出速度GPIO_Instrcture.GPIO_Speed=GPIO_Speed_50MHz;//可选50,10,2MHz 6.初始化管脚的电平GPIO_SetBits(GPIOA,GPIO_Pin_1 | GPIO_Pin_2);原函数void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin){/* Check the parameters */assert_param(IS_GPIO_ALL_PERIPH(GPIOx));assert_param(IS_GPIO_PIN(GPIO_Pin));GPIOx->BSRR = GPIO_Pin; //GPIOx->BSRR端口置位、复位寄存器,对输出寄存器置1、清零T D _s i mo n}7.调用GPIO_Init()函数,配置完毕。
S3C2410GPIO及AD转换

总结与展望
● 优 势 : . 性 能 稳 定 :S3C2410 GPIO及D转 换具 有较 高的 稳定 性能 够保 证数 据的 准确 性和 可靠 性。 b . 兼 容 性 强 : S3C2410 GPIO及D转 换支 持多 种接 口可 以方 便地 与其 他设 备进 行通 信。 c . 功 耗 低 :S3C2410 GPIO及D转换 的功 耗 较低可以降低设备的能耗提高设备的续航能力。
D转换器的精度和速度取决 于其内部结构和算法
工作原理:将模拟信号转 换为数字信号
转换精度:12位
转换速度:100kHz
应用领域:工业控制、医 疗设备、通信设备等
温度测量:通过D转换获取温度传感器的输出信号实现温度测量 压力测量:通过D转换获取压力传感器的输出信号实现压力测量 电流测量:通过D转换获取电流传感器的输出信号实现电流测量 电压测量:通过D转换获取电压传感器的输出信号实现电压测量
S3C2410 GPIO寄存器:用于控 制GPIO引脚的状态和功能
S3C2410 D转换寄存器:用于 控制D转换器的工作模式和数据 读取
S3C2410 GPIO控制寄存器: 用于设置GPIO引脚的输入输 出模式、中断触发方式等
S3C2410 D转换控制寄存器: 用于设置D转换器的采样频率、 分辨率等
GPIO在S3C2410芯 片中的作用
GPIO的基本操作
GPIO的应用场景
GPIO的常见问题及 解决方案
D转换(模数转换)
添加标题
D转换:将模拟信号 转换为数字信号的过 程
添加标题
主要应用:传感器、 音频、视频等领域
添加标题
转换方式:逐次比较、 双积分、逐次逼近等
添加标题
转换精度:取决于DC 的分辨率和采样频率
HAODE基于Android平台的键盘输入技术研究
两种 ,此 处主 要 以按键 键盘 为例来 介绍 。 L i n u x 从2 . 6 版本 开始 引入 了p l a t f o r m 这 个概 念 ,将 设 备驱 动 的开 发工 作 主要 分 为两块:P l a t f o r m d e v i C e 和P 1 a t f o r m
2 . A n d r o i d 输入 系统 解析
A n d r o i d 中 ,主 要 的输 入 硬 件 设 备是 b u t t o n 控 件 ,实 现按 键控 制 ;并 且要 通过
键 盘 、 触摸 屏 、轨迹 球 等 。输 入 系统 的结 有 限 的按键 数 目实现 数字 、字 母 、 中文 的
详细 介绍 ,将在 下 文作 具体讲 解 。 3 . L i n u x 内核 驱动 层分 析
虽然煤 矿生产作 为一个特殊 领域 , 有 其 安全 性 、 防爆 、 防潮等 特 殊 的工 艺要
I 丝一 探索
察……………………….
HAODE 基 于An d r o i d 平 台的键 盘 输入 技 术研 究
天地 ( 常州 )自 动化股份有 限公 司 蒋 华
【 摘要 】分析 了智 能终端技术在矿 用平 台的可行性 ,并根据矿业生产 的实际需求,提 出了 I 进传统键盘输入技术作为 输入 系统的补充技术 ,替代无法在矿业环境 使 用的触摸屏技术 ,实现A n d r o i d  ̄统终端在矿业 生产领 域的g I 进 ,促 进 了以高速C P U、智 能控制技 术为代 表的先进平 台在矿业环境使用 ,逐步实现矿场设备 的更
Hale Waihona Puke A n d r o i d 、i 0 S 、W i n 8 等 智 能终 端操 作 系统 构 也 比较 简 单 , 自下 而 上 包 含 了驱 动 程 输入 ,符合 这 些要 求 的 ,只有 传 统键 盘符 三 分 天下 ,代 表 了 智能 终端 操作 系 统 的发 序 、本 地库 处理 部 分 、硬件 抽 象层 、J a v a 合 , 只是 它 的接 口方 式可 以有 矩 阵和 按键
android surfacecontrol中 setposition接口的用法(一)

android surfacecontrol中 setposition接口的用法(一)Android SurfaceControl中setPosition接口的用法简介SurfaceControl是Android系统中用于管理和控制原生窗口(Surface)的类。
其中,setPosition接口是SurfaceControl类中的一个方法,用于设置窗口的位置。
用法一:设置窗口的绝对位置通过setPosition接口可以设置窗口的绝对位置,即相对于屏幕左上角的坐标。
具体步骤如下: 1. 获取Surface的SurfaceControl对象:SurfaceControl surfaceControl = new SurfaceControl ();2.设置窗口的绝对位置:(x, y);其中,x和y分别表示窗口左上角相对于屏幕左上角的横纵坐标。
用法二:设置窗口的相对位置除了设置窗口的绝对位置,setPosition接口还可以用于设置窗口的相对位置。
具体步骤如下: 1. 获取Surface的SurfaceControl 对象:SurfaceControl surfaceControl = new SurfaceControl ();2.获取屏幕尺寸:Point screenSize = new Point();getWindowManager().getDefaultDisplay().getSize(screenSiz e);3.设置窗口的相对位置:( * relativeX, * relativeY);其中,relativeX和relativeY分别表示窗口相对于屏幕宽度和高度的比例,取值范围为到。
用法三:动态更新窗口位置除了在创建窗口时设置位置,setPosition接口还可以在运行时动态更新窗口位置。
具体步骤如下: 1. 获取Surface的SurfaceControl对象:SurfaceControl surfaceControl = new SurfaceControl ();2.定义更新位置的方法:public void updatePosition(float newX, float newY){(newX, newY);}3.调用更新位置的方法:updatePosition(newX, newY);其中,newX和newY分别表示新的窗口位置的横纵坐标。
GPIO的操作规则和步骤

GPIO的操作规则和步骤⼀个名词,GPIO,英⽂全称是general purpose input/output,意为通⽤输⼊输出⼝。
DSP最终都是通过程序和外部模块或者设备产⽣数据交换的,所以,必须了解她的输⼊输出端⼝。
都还记得51单⽚机的输⼊输出⼝吧,虽然我好久没有给51编制过程序了,但是还记得51的输⼊输出端⼝是可以直接拿来赋值使其输出,或者直接⽤⼀条if语句去检测有⽆数据输⼊,相⽐⽽⾔,DSP的输⼊输出端⼝在这⽅⾯就复杂的多了。
⼀点要记住,DSP的GPIO端⼝,必须先设置后使⽤,具体需要⾃⼰编程设置某⼀个⼝线以下的⼏个点:1,该⼝是使能它的第⼀功能还是第⼆功能(因为很多端⼝都有复⽤的第⼆功能);2,该⼝如果使⽤输⼊输出功能,那么到底是⽤作输⼊,还是⽤作输出;以上两项设置完毕之后,就可以对GPIO⼝进⾏读或者写的操作了,不管读还是写⼀个⼝,都有相关的数据寄存器来存放你写到该⼝的值,或者外部输⼊给了这个端⼝,你需要通过读取这个数据寄存器得到这个外部输⼊的数据,仅此⽽已。
TI把GPIO分成了6组,这六组分别是GPIOA,GPIOB,GPIOD,GPIOE,GPIOF,GPIOG,这其中的每⼀组都包含了⼀个DSP实实在在的展⽰给外界的多个引脚,我们以GPIOA为例来看看仅仅是第⼀组GPIOA她究竟是包含了那些引脚。
可以看到,仅仅GPIOA这⼀组,包含了16个引脚,图⽚中第⼆列即为TI在出⼚时给这款DSP引脚所命的名称,通过查阅2812的176针LQFP封装定出了这16个引脚分别对应了92,93,94,95,98,101,102,104,106,107,109,116,117,122,123,124脚。
下⾯我们以GPIOA这⼀组为例,来看看相关寄存器的设置以及使⽤。
寄存器包含两⼤类,第⼀类叫控制寄存器,第⼆类叫数据寄存器。
控制寄存器包含三个:GPAMUX,GPADIR,GPAQUAL----功能选择,⽅向设置,输⼊限定;数据寄存器包含4个:GPADAT,GPASET,GPACLEAR,GPATOGGLE----数据,置⼀,清零,取反;前已述及,通过控制寄存器去设置GPIO的功能,通过数据寄存器去获取或者写⼊数据。
Android修改按键驱动
Note 01 android按键驱动研究这部分的研究主要是android按键驱动的改写。
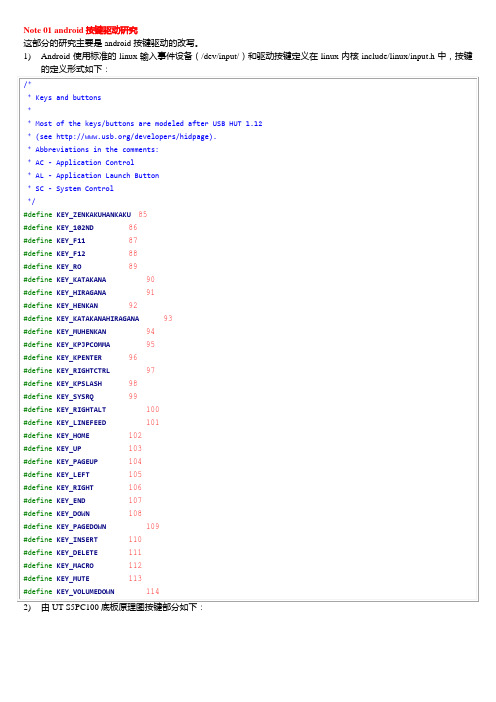
1)Android使用标准的linux输入事件设备(/dev/input/)和驱动按键定义在linux内核include/linux/input.h中,按键的定义形式如下:/** Keys and buttons** Most of the keys/buttons are modeled after USB HUT 1.12* (see /developers/hidpage).* Abbreviations in the comments:* AC ‐ Application Control* AL ‐ Application Launch Button* SC ‐ System Control*/#define KEY_ZENKAKUHANKAKU 85#define KEY_102ND 86#define KEY_F11 87#define KEY_F12 88#define KEY_RO 89#define KEY_KATAKANA 90#define KEY_HIRAGANA 91#define KEY_HENKAN 92#define KEY_KATAKANAHIRAGANA 93#define KEY_MUHENKAN 94#define KEY_KPJPCOMMA 95#define KEY_KPENTER 96#define KEY_RIGHTCTRL 97#define KEY_KPSLASH 98#define KEY_SYSRQ 99#define KEY_RIGHTALT 100#define KEY_LINEFEED 101#define KEY_HOME 102#define KEY_UP 103#define KEY_PAGEUP 104#define KEY_LEFT 105#define KEY_RIGHT 106#define KEY_END 107#define KEY_DOWN 108#define KEY_PAGEDOWN 109#define KEY_INSERT 110#define KEY_DELETE 111#define KEY_MACRO 112#define KEY_MUTE 113#define KEY_VOLUMEDOWN 1142)由UT-S5PC100底板原理图按键部分如下:核心板原理图按键接口部分如下:内核中(drivers/input/keyboard/s3c_botton.c)按键的驱动程序如下/** Driver for keys on GPIO lines.** Copyright 2009 jiangjianjun <jerryjianjun@>** This program is free software; you can redistribute it and/or modify * it under the terms of the GNU General Public License version 2 as* published by the Free Software Foundation.*/#include <linux/module.h>#include <linux/init.h>#include <linux/fs.h>#include <linux/interrupt.h>#include <linux/irq.h>#include <linux/sched.h>#include <linux/pm.h>#include <linux/sysctl.h>#include <linux/proc_fs.h>#include <linux/delay.h>#include <linux/platform_device.h>#include <linux/input.h>#include <asm/gpio.h>#include <linux/gpio.h>#include <plat/regs‐gpio.h>#include <plat/gpio‐cfg.h>#define MAX_BUTTON_CNT (6)static struct timer_list timer;static struct input_dev * input;static int ut_s5pc100_key_gpio_list[MAX_BUTTON_CNT] ={1, 2, 3, 4, 6, 7}; //UT‐S5PC100 using GPH groupstatic int s3c_Keycode[MAX_BUTTON_CNT] ={KEY_UP, KEY_LEFT, KEY_RIGHT, KEY_DOWN, KEY_ESC, KEY_ENTER}; //UT‐S5PC100 static int s3c_button_history[MAX_BUTTON_CNT] = { 0, 0, 0, 0, 0, 0};static void s3cbutton_timer_handler(unsigned long data){int flag;int i;for(i = 0; i < MAX_BUTTON_CNT; i++){flag = gpio_get_value(S5PC1XX_GPH0(ut_s5pc100_key_gpio_list[i]));if(flag != s3c_button_history[i]){if(flag)input_report_key(input, s3c_Keycode[i], 0);elseinput_report_key(input, s3c_Keycode[i], 1);s3c_button_history[i] = flag;}}/* Kernel Timer restart */mod_timer(&timer,jiffies + HZ/100);}static int s3c_button_probe(struct platform_device *pdev){int i;for(i = 0; i < MAX_BUTTON_CNT; i++){s3c_gpio_setpull(S5PC1XX_GPH0(ut_s5pc100_key_gpio_list[i]), S3C_GPIO_PULL_UP); gpio_direction_input(S5PC1XX_GPH0(ut_s5pc100_key_gpio_list[i]));}input = input_allocate_device();if(!input)return ‐ENOMEM;set_bit(EV_KEY, input‐>evbit);//set_bit(EV_REP, input‐>evbit); /* Repeat Key */for(i = 0; i < MAX_BUTTON_CNT; i++)set_bit(s3c_Keycode[i], input‐>keybit);input‐>name = "s3c‐button";input‐>phys = "s3c‐button/input0";input‐>id.bustype = BUS_HOST;input‐>id.vendor = 0x0001;input‐>id.product = 0x0001;input‐>id.version = 0x0100;input‐>keycode = s3c_Keycode;if(input_register_device(input) != 0){printk("s3c‐button input register device fail!!\n");input_free_device(input);return ‐ENODEV;}/* Scan timer init */init_timer(&timer);timer.function = s3cbutton_timer_handler;timer.expires = jiffies + (HZ/100);add_timer(&timer);printk("s3c button Initialized!!\n");return 0;} ?end s3c_button_probe ?static int s3c_button_remove(struct platform_device *pdev) {input_unregister_device(input);del_timer(&timer);return 0;}#ifdef CONFIG_PMstatic int s3c_button_suspend(struct platform_device *pdev, pm_message_t state) {return 0;}static int s3c_button_resume(struct platform_device *pdev){return 0;}#else#define s3c_button_suspend NULL#define s3c_button_resume NULL#endifstatic struct platform_driver s3c_button_device_driver = {.probe = s3c_button_probe,.remove = s3c_button_remove,.suspend = s3c_button_suspend,.resume = s3c_button_resume,.driver = {.name = "s3c‐button",.owner = THIS_MODULE,}};static struct platform_device s3c_device_button = {.name = "s3c‐button",.id = ‐1,};static int __init s3c_button_init(void){platform_device_register(&s3c_device_button);return platform_driver_register(&s3c_button_device_driver);}static void __exit s3c_button_exit(void){platform_driver_unregister(&s3c_button_device_driver);platform_device_unregister(&s3c_device_button);}module_init(s3c_button_init);module_exit(s3c_button_exit);MODULE_LICENSE("GPL");MODULE_AUTHOR("jerry jianjun <jerryjianjun@>");MODULE_DESCRIPTION("Keyboard driver for s3c button.");MODULE_ALIAS("platform:s3c‐button");3)有以上驱动程序就实现了从硬件GPIO口到内核标准按键的映射,但是android系统没有直接使用映射后的值,而是对其再进行了一次映射。
gpio输入输出原理

gpio输入输出原理GPIO是通用输入输出,是计算机系统中用来接收或发送外部信号的一种常见的接口或IO端口。
它通过控制物理上的引脚,实现与外界的通信。
在嵌入式系统中,GPIO经常被用作输入和输出的接口,它可以读取来自外界的信号,控制外设的操作。
GPIO输入输出原理GPIO的输入或输出取决于相应的寄存器设置和相应的物理引脚的状态。
GPIO控制器会初始化这些寄存器的值并监视连线的信号,当信号发生变化时,控制器将读取寄存器的值,并将状态传递给系统的操作系统。
GPIO的输入原理:GPIO输入它本身不会引起变化,它只会检测连接到应用的电子设备的状态,一旦检测到状态发生变化,它会向相应的寄存器传输状态,并将其传递给系统。
如果想要 GPIO的输入口能够正常工作,那么RA(GPIO寄存器A)和RD(GPIO寄存器D)寄存器必须得到适当的配置,以确保在 GPIO引脚上能够检测到变化后,将信号传输给系统。
GPIO输出原理:当应用想要GPIO输出时,它可以通过寄存器设置输出值。
输出值的设置会导致相应的物理引脚状态发生变化,并向它连接的电子设备发送信号。
在 GPIO的输出模式下,系统会将输出值存储在 RA(GPIO寄存器A)寄存器中,然后系统就可以通过相应的物理引脚将输出信号传输到接收设备。
在嵌入式系统中,GPIO 的功能通常要由驱动程序来实现。
每个GPIO引脚都需要与相应的寄存器配对使用。
通常,处理器的数据手册会明确定义如何配置寄存器以使GPIO输入输出正常工作。
以Raspberry Pi 3模型B为例,该设备有40个GPIO引脚,每个引脚都与相应的寄存器配对使用。
GPIO引脚的状态(高电平或低电平)和控制状态(输入或输出)都可以通过相应的寄存器来配置。
每个GPIO引脚的默认状态都是输入模式,并且必须适当配置,以使它能够在系统中正常工作。
GPIO输入输出模式在GPIO模式中,有两种常见的状态:输出状态和输入状态。
GPIO输入模式: GPIO输入模式是指将GPIO引脚连接到其他设备的模式,例如连接按钮或传感器。
gpio控制npn三极管

gpio控制npn三极管摘要:1.简介2.GPIO 控制NPN 三极管的基础知识3.GPIO 控制NPN 三极管的方法4.实际应用案例5.总结正文:1.简介在电子电路设计中,NPN 三极管是一种常用的半导体元器件,广泛应用于放大、开关、调制、稳压等电路。
在嵌入式系统设计中,通过GPIO(通用输入/输出)端口来控制NPN 三极管,可以实现各种功能。
本文将详细介绍如何通过GPIO 控制NPN 三极管。
2.GPIO 控制NPN 三极管的基础知识在了解如何通过GPIO 控制NPN 三极管之前,我们需要了解一些基础知识。
NPN 三极管由两个N 型半导体和第三个P 型半导体组成,可以通过控制基极电流来控制集电极电流。
通常情况下,NPN 三极管有三个引脚,分别是发射极(Emitter,E)、基极(Base,B)和集电极(Collector,C)。
GPIO 是嵌入式系统中的一种通用接口,用于输入或输出数据。
通过配置GPIO 的输入输出模式和电平,可以实现对NPN 三极管的控制。
3.GPIO 控制NPN 三极管的方法要通过GPIO 控制NPN 三极管,首先需要将GPIO 端口连接到三极管的基极,然后通过编程设置GPIO 的输入输出模式和电平。
通常情况下,GPIO 控制NPN 三极管的方法如下:(1) 配置GPIO 输入模式:将GPIO 端口设置为输入模式,用于读取外部信号。
(2) 配置GPIO 输出模式:将GPIO 端口设置为输出模式,用于控制外部负载。
(3) 设置GPIO 电平:通过编程设置GPIO 端口的输出电平,以控制NPN 三极管的导通和截止。
4.实际应用案例以下是一个简单的通过GPIO 控制NPN 三极管的实例:假设我们有一个GPIO 端口(如GPIOA),需要通过它来控制一个NPN 三极管(如T1)。
首先,我们需要连接GPIOA 的引脚到三极管的基极(如Pin 2),然后连接三极管的发射极(如Pin 1)和集电极(如Pin 3)到外部负载(如LED)。
gpio控制npn三极管

gpio控制npn三极管【原创实用版】目录1.GPIO 简介2.NPN 三极管简介3.GPIO 控制 NPN 三极管的方法4.应用实例正文1.GPIO 简介GPIO(General Purpose Input/Output,通用输入/输出)是微控制器(MCU)上的一个重要外设,它可以通过编程配置为输入或输出模式。
GPIO口可根据需要连接到各种外设,如LED、开关、传感器等,实现对这些外设的控制。
2.NPN 三极管简介PN 三极管是一种双极型晶体管,由两个 n 型半导体(发射极和集电极)和一个 p 型半导体(基极)组成。
它具有三个引脚,分别是发射极(E)、基极(B)和集电极(C)。
NPN 三极管可以放大电流、开关电路、调制信号等。
3.GPIO 控制 NPN 三极管的方法要使用 GPIO 控制 NPN 三极管,首先需要将 GPIO 口配置为输出模式,并通过上拉电阻将 GPIO 口与 NPN 三极管的基极相连。
当 GPIO 输出高电平时,NPN 三极管导通,集电极与发射极之间的电阻较小;当 GPIO 输出低电平时,NPN 三极管截止,集电极与发射极之间的电阻较大。
通过这种方式,我们可以用 GPIO 控制 NPN 三极管的开关状态。
4.应用实例一个典型的应用实例是使用 GPIO 控制 NPN 三极管驱动 LED。
首先,将 GPIO 口配置为输出模式,并将其与 NPN 三极管的基极相连。
接着,将 NPN 三极管的集电极连接到 LED 的正极,发射极连接到 LED 的负极。
此时,通过调整 GPIO 口的输出电平,可以实现对 LED 的开启和关闭。
当 GPIO 输出高电平时,NPN 三极管导通,LED 亮;当 GPIO 输出低电平时,NPN 三极管截止,LED 灭。
总之,通过 GPIO 控制 NPN 三极管,我们可以实现对各种外设的控制,如 LED、开关等。
Android手机控制ZigBee板上LED
Android手机控制ZigBee板上LED分类:ZigBeeAndroid2013-08-06 16:39344人阅读评论(0)收藏举报环境:Windows编译器:IAREW8051-8.1硬件:CC2530协议栈:ZStack-CC2530-2.3.0-1.4.0手机:Android4.1.2又重新开始学习ZigBee技术,摸索了一哈通信流程,本例程没有涉及到ZigBee组网,读者可自行扩展。
ZigBee流程如下:从串口接收指令信息,根据指令信息控制相应的LED资源,工作模式为协调器,可用GenericApp工程改编,代码如下[cpp]view plaincopyprint?1./**************************************************************************************************2.Filename: TESTApp.c3.Revised: $Date: 2009-03-18 15:56:27 -0700 (Wed, 18 Mar 2009) $4.Revision: $Revision: 19453 $5.6.Description: TEST Application (no Profile).7.8.9.Copyright 2004-2009 Texas Instruments Incorporated. All rights reserved.10.11.IMPORTANT: Your use of this Software is limited to those specific rights12.granted under the terms of a software license agreement between the user13.who downloaded the software, his/her employer (which must be your employer)14.and Texas Instruments Incorporated (the "License"). You may not use this15.Software unless you agree to abide by the terms of the License. The License16.limits your use, and you acknowledge, that the Software may not be modified,17.copied or distributed unless embedded on a Texas Instruments microcontroller18.or used solely and exclusively in conjunction with a Texas Instruments radio19.frequency transceiver, which is integrated into your product. Other than for20.the foregoing purpose, you may not use, reproduce, copy, prepare derivative21.works of, modify, distribute, perform, display or sell this Software and/or22.its documentation for any purpose.23.24.YOU FURTHER ACKNOWLEDGE AND AGREE THAT THE SOFTWARE AND DOCUMENTATION ARE25.PROVIDED 揂S IS?WITHOUT WARRANTY OF ANY KIND, EITHER EXPRESS OR IMPLIED,26.INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF MERCHANTABILITY, TITLE,27.NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE. IN NO EVENT SHALL28.TEXAS INSTRUMENTS OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER CONTRACT,29.NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR OTHER30.LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES31.INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE32.OR CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT33.OF SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES34.(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.35.36.Should you have any questions regarding your right to use this Software,37.contact Texas Instruments Incorporated at .38.**************************************************************************************************/39.40./*********************************************************************41.This application isn't intended to do anything useful, it is42.intended to be a simple example of an application's structure.43.44.This application sends "Hello World" to another "TEST"45.application every 15 seconds. The application will also46.receive "Hello World" packets.47.48.The "Hello World" messages are sent/received as MSG type message.49.50.This applications doesn't have a profile, so it handles everything51.directly - itself.52.53.Key control:54.SW1:55.SW2: initiates end device binding56.SW3:57.SW4: initiates a match description request58.*********************************************************************/59.60./*********************************************************************61.* INCLUDES62.*/63.#include "OSAL.h"64.#include "AF.h"65.#include "ZDApp.h"66.#include "ZDObject.h"67.#include "ZDProfile.h"68.69.#include "Common.h"70.#include "DebugTrace.h"71.72.#if !defined( WIN32 )73.#include "OnBoard.h"74.#endif75.76./* HAL */77.#include "hal_lcd.h"78.#include "hal_led.h"79.#include "hal_key.h"80.#include "hal_uart.h"81.82.#include "OSAL_Nv.h"83.84./*********************************************************************85.* MACROS86.*/87.88./*********************************************************************89.* CONSTANTS90.*/91.92./*********************************************************************93.* TYPEDEFS94.*/95.96./*********************************************************************97.* GLOBAL VARIABLES98.*/99.100.// This list should be filled with Application specific Cluster IDs. 101.c onst cId_t TESTApp_ClusterList[TESTAPP_MAX_CLUSTERS] =102.{103.T ESTAPP_CLUSTERID104.};105.106.c onst SimpleDescriptionFormat_t TestApp_SimpleDesc =107.{108.T ESTAPP_ENDPOINT, // int Endpoint;109.T ESTAPP_PROFID, // uint16 AppProfId[2];110.T ESTAPP_DEVICEID, // uint16 AppDeviceId[2];111.T ESTAPP_DEVICE_VERSION, // int AppDevVer:4;112.T ESTAPP_FLAGS, // int AppFlags:4;113.T ESTAPP_MAX_CLUSTERS, // byte AppNumInClusters;114.(cId_t *)TESTApp_ClusterList, // byte *pAppInClusterList;115.0, // byte AppNumInClusters;116.(cId_t *)NULL // byte *pAppInClusterList;117.};//用于描述一个设备节点118.119.// This is the Endpoint/Interface description. It is defined here, but 120.// filled-in in TESTApp_Init(). Another way to go would be to fill 121.// in the structure here and make it a "const" (in code space). The 122.// way it's defined in this sample app it is define in RAM.123.e ndPointDesc_t TestApp_epDesc;//节点描述符124.125./********************************************************************* 126.* EXTERNAL VARIABLES127.*/128.129./********************************************************************* 130.* EXTERNAL FUNCTIONS131.*/132.133./********************************************************************* 134.* LOCAL VARIABLES135.*/136.b yte TestApp_TaskID; // Task ID for internal task/event processing 137.// This variable will be received when138.// TESTApp_Init() is called.139.d evStates_t TestApp_NwkState;140.141.142.b yte TestApp_TransID; // This is the unique message ID (counter) 143.144.a fAddrType_t TestApp_DstAddr;145.146.147.s tatic uint8 SerialApp_TxLen;148.s tatic void rxCB(uint8 port, uint8 event);149./********************************************************************* 150.* LOCAL FUNCTIONS151.*/152.v oid TestApp_ProcessZDOMsgs( zdoIncomingMsg_t *inMsg );153.v oid TestApp_HandleKeys( byte shift, byte keys );154.v oid TestApp_MessageMSGCB( afIncomingMSGPacket_t *pckt );155.v oid TestApp_SendTheMessage( void );156.157./********************************************************************* 158.* NETWORK LAYER CALLBACKS159.*/160.161./********************************************************************* 162.* PUBLIC FUNCTIONS163.*/164.165./********************************************************************* 166.* @fn TESTApp_Init167.*168.* @brief Initialization function for the TEST App Task.169.* This is called during initialization and should contain170.* any application specific initialization (ie. hardware171.* initialization/setup, table initialization, power up172.* notificaiton ... ).173.*174.* @param task_id - the ID assigned by OSAL. This ID should be175.* used to send messages and set timers.176.*177.* @return none178.*/179.v oid TestApp_Init( byte task_id )180.{181.h alUARTCfg_t uartConfig;182.T estApp_TaskID = task_id;183.T estApp_NwkState = DEV_INIT;184.T estApp_TransID = 0;185.186.// Device hardware initialization can be added here or in main() (Zmain.c). 187.// If the hardware is application specific - add it here.188.// If the hardware is other parts of the device add it in main().189.190.T estApp_DstAddr.addrMode = (afAddrMode_t)Addr16Bit;191.T estApp_DstAddr.endPoint = TESTAPP_ENDPOINT;192.T estApp_DstAddr.addr.shortAddr = 0xFFFF;193.194.// Fill out the endpoint description.195.T estApp_epDesc.endPoint = TESTAPP_ENDPOINT;196.T estApp_epDesc.task_id = &TestApp_TaskID;197.T estApp_epDesc.simpleDesc198.= (SimpleDescriptionFormat_t *)&TestApp_SimpleDesc;199.T estApp_tencyReq = noLatencyReqs;200.201.// Register the endpoint description with the AF202.a fRegister( &TestApp_epDesc );203.204.u artConfig.configured = TRUE;205.u artConfig.baudRate = HAL_UART_BR_115200;206.u artConfig.flowControl = FALSE;207.u artConfig.flowControlThreshold = 64; // 2x30 don't care - see uart driver. 208.u artConfig.rx.maxBufSize = 128; // 2x30 don't care - see uart driver. 209.u artConfig.tx.maxBufSize = 128; // 2x30 don't care - see uart driver. 210.u artConfig.idleTimeout = 6; // 2x30 don't care - see uart driver.211.u artConfig.intEnable = TRUE; // 2x30 don't care - see uart driver.212.u artConfig.callBackFunc = rxCB;213.H alUARTOpen (0, &uartConfig);214.215.// Register for all key events - This app will handle all key events216.//RegisterForKeys( TestApp_TaskID );217.218.// Update the display219.#if defined ( LCD_SUPPORTED )220.H alLcdWriteString( "TestApp", HAL_LCD_LINE_1 );221.#endif222.223.Z DO_RegisterForZDOMsg( TestApp_TaskID, End_Device_Bind_rsp );224.Z DO_RegisterForZDOMsg( TestApp_TaskID, Match_Desc_rsp );225.}226.227./*********************************************************************228.* @fn TESTApp_ProcessEvent229.*230.* @brief TEST Application Task event processor. This function231.* is called to process all events for the task. Events232.* include timers, messages and any other user defined events.233.*234.* @param task_id - The OSAL assigned task ID.235.* @param events - events to process. This is a bit map and can236.* contain more than one event.237.*238.* @return none239.*/240.U INT16 TestApp_ProcessEvent( byte task_id, UINT16 events )241.{242.a fIncomingMSGPacket_t *MSGpkt;243.244.245.246.(void)task_id; // Intentionally unreferenced parameter247.248.i f ( events & SYS_EVENT_MSG )249.{250.M SGpkt = (afIncomingMSGPacket_t *)osal_msg_receive( TestApp_TaskID );251.w hile ( MSGpkt )252.{253.s witch ( MSGpkt->hdr.event )254.{255.256.c ase KEY_CHANGE:257.T estApp_HandleKeys( ((keyChange_t *)MSGpkt)->state, ((keyChange_t *)MSGpkt)->keys ); 258.b reak;260.c ase AF_INCOMING_MSG_CMD:261.T estApp_MessageMSGCB( MSGpkt );262.b reak;263.264.d efault:265.b reak;266.}267.268.// Release the memory269.o sal_msg_deallocate( (uint8 *)MSGpkt );//释放消息所占用空间270.271.// Next272.M SGpkt = (afIncomingMSGPacket_t *)osal_msg_receive( TestApp_TaskID );//接着获取消息273.}274.275.// return unprocessed events276.r eturn (events ^ SYS_EVENT_MSG);277.}278.279.// Send a message out - This event is generated by a timer280.// (setup in TESTApp_Init()).281.i f ( events & TESTAPP_SEND_MSG_EVT )282.{283.// Send "the" message284.T estApp_SendTheMessage();285.286.// Setup to send message again287.o sal_start_timerEx( TestApp_TaskID,288.T ESTAPP_SEND_MSG_EVT,289.T ESTAPP_SEND_MSG_TIMEOUT );290.291.// return unprocessed events292.r eturn (events ^ TESTAPP_SEND_MSG_EVT);293.}294.295.// Discard unknown events296.r eturn 0;297.}299./********************************************************************* 300.* Event Generation Functions301.*/302.303./********************************************************************* 304.* @fn TESTApp_ProcessZDOMsgs()305.*306.* @brief Process response messages307.*308.* @param none309.*310.* @return none311.*/312.v oid TestApp_ProcessZDOMsgs( zdoIncomingMsg_t *inMsg )313.{314.s witch ( inMsg->clusterID )315.{316.c ase End_Device_Bind_rsp:317.i f ( ZDO_ParseBindRsp( inMsg ) == ZSuccess )318.{319.// Light LED320.H alLedSet( HAL_LED_4, HAL_LED_MODE_ON );321.}322.#if defined(BLINK_LEDS)323.e lse324.{325.// Flash LED to show failure326.H alLedSet ( HAL_LED_4, HAL_LED_MODE_FLASH );327.}328.#endif329.b reak;330.331.c ase Match_Desc_rsp:332.{333.Z DO_ActiveEndpointRsp_t *pRsp = ZDO_ParseEPListRsp( inMsg );334.i f ( pRsp )335.{336.i f ( pRsp->status == ZSuccess && pRsp->cnt )338.T estApp_DstAddr.addrMode = (afAddrMode_t)Addr16Bit;339.T estApp_DstAddr.addr.shortAddr = pRsp->nwkAddr;340.// Take the first endpoint, Can be changed to search through endpoints 341.T estApp_DstAddr.endPoint = pRsp->epList[0];342.343.// Light LED344.H alLedSet( HAL_LED_4, HAL_LED_MODE_ON );345.}346.o sal_mem_free( pRsp );347.}348.}349.b reak;350.}351.}352.353./********************************************************************* 354.* @fn TESTApp_HandleKeys355.*356.* @brief Handles all key events for this device.357.*358.* @param shift - true if in shift/alt.359.* @param keys - bit field for key events. Valid entries:360.* HAL_KEY_SW_4361.* HAL_KEY_SW_3362.* HAL_KEY_SW_2363.* HAL_KEY_SW_1364.*365.* @return none366.*/367.v oid TestApp_HandleKeys( byte shift, byte keys )368.{369.z AddrType_t dstAddr;370.371.// Shift is used to make each button/switch dual purpose.372.i f ( shift )373.{374.i f ( keys & HAL_KEY_SW_1 )375.{376.}377.i f ( keys & HAL_KEY_SW_2 )378.{379.}380.i f ( keys & HAL_KEY_SW_3 )381.{382.}383.i f ( keys & HAL_KEY_SW_4 )384.{385.}386.}387.e lse388.{389.i f ( keys & HAL_KEY_SW_1 )390.{391.}392.393.i f ( keys & HAL_KEY_SW_2 )394.{395.H alLedSet ( HAL_LED_4, HAL_LED_MODE_OFF );396.397.// Initiate an End Device Bind Request for the mandatory endpoint 398.d stAddr.addrMode = Addr16Bit;399.d stAddr.addr.shortAddr = 0x0000; // Coordinator400.Z DP_EndDeviceBindReq( &dstAddr, NLME_GetShortAddr(),401.T estApp_epDesc.endPoint,402.T ESTAPP_PROFID,403.T ESTAPP_MAX_CLUSTERS, (cId_t *)TESTApp_ClusterList,404.T ESTAPP_MAX_CLUSTERS, (cId_t *)TESTApp_ClusterList,405.F ALSE );406.}407.408.i f ( keys & HAL_KEY_SW_3 )409.{410.}411.412.i f ( keys & HAL_KEY_SW_4 )413.{414.H alLedSet ( HAL_LED_4, HAL_LED_MODE_OFF );415.// Initiate a Match Description Request (Service Discovery)416.d stAddr.addrMode = AddrBroadcast;417.d stAddr.addr.shortAddr = NWK_BROADCAST_SHORTADDR;418.Z DP_MatchDescReq( &dstAddr, NWK_BROADCAST_SHORTADDR,419.T ESTAPP_PROFID,420.T ESTAPP_MAX_CLUSTERS, (cId_t *)TESTApp_ClusterList,421.T ESTAPP_MAX_CLUSTERS, (cId_t *)TESTApp_ClusterList,422.F ALSE );423.}424.}425.}426.427./********************************************************************* 428.* LOCAL FUNCTIONS429.*/430.431./********************************************************************* 432.* @fn TESTApp_MessageMSGCB433.*434.* @brief Data message processor callback. This function processes 435.* any incoming data - probably from other devices. So, based436.* on cluster ID, perform the intended action.437.*438.* @param none439.*440.* @return none441.*/442.v oid TestApp_MessageMSGCB( afIncomingMSGPacket_t *pkt )443.{444.u nsigned char buffer;445.s tatic unsigned char LEDState[5];446.s witch ( pkt->clusterId )447.{448.c ase TESTAPP_CLUSTERID:449.// "the" message450.o sal_memcpy(&buffer, pkt->cmd.Data, 1);451.s witch(buffer)452.{453.c ase 1:454.L EDState[0]++;455.i f(LEDState[0] == 2)456.{457.L EDState[0] = 0;458.}459.i f(LEDState[0] == 0)460.{461.H alLedSet(HAL_LED_1, HAL_LED_MODE_ON); 462.}463.e lse464.{465.H alLedSet(HAL_LED_1, HAL_LED_MODE_OFF); 466.}467.b reak;468.c ase 2:469.L EDState[1]++;470.i f(LEDState[1] == 2)471.{472.L EDState[1] = 0;473.}474.i f(LEDState[1] == 0)475.{476.H alLedSet(HAL_LED_2, HAL_LED_MODE_ON); 477.}478.e lse479.{480.H alLedSet(HAL_LED_2, HAL_LED_MODE_OFF); 481.}482.b reak;483.c ase 3:484.L EDState[2]++;485.i f(LEDState[2] == 2)486.{487.L EDState[2] = 0;488.}489.i f(LEDState[2] == 0)490.{491.H alLedSet(HAL_LED_3, HAL_LED_MODE_ON); 492.}493.e lse494.{495.H alLedSet(HAL_LED_3, HAL_LED_MODE_OFF);496.}497.b reak;498.c ase 4:499.L EDState[3]++;500.i f(LEDState[3] == 2)501.{502.L EDState[3] = 0;503.}504.i f(LEDState[3] == 0)505.{506.H alLedSet(HAL_LED_4, HAL_LED_MODE_ON);507.}508.e lse509.{510.H alLedSet(HAL_LED_4, HAL_LED_MODE_OFF);511.}512.b reak;513.c ase 5:514.L EDState[4]++;515.i f(LEDState[4] == 2)516.{517.L EDState[4] = 0;518.}519.i f(LEDState[4] == 0)520.{521.H alLedSet(HAL_LED_ALL, HAL_LED_MODE_ON);522.}523.e lse524.{525.H alLedSet(HAL_LED_ALL, HAL_LED_MODE_OFF);526.}527.b reak;528.}529.#if defined( LCD_SUPPORTED )530.H alLcdWriteScreen( (char*)pkt->cmd.Data, "rcvd" ); 531.#elif defined( WIN32 )532.W PRINTSTR( pkt->cmd.Data );533.#endif534.b reak;535.}536.}537.538./********************************************************************* 539.* @fn TESTApp_SendTheMessage540.*541.* @brief Send "the" message.542.*543.* @param none544.*545.* @return none546.*/547.v oid TestApp_SendTheMessage( void )548.{549.c har theMessageData[] = "LED";550.551.i f ( AF_DataRequest( &TestApp_DstAddr, &TestApp_epDesc,552.T ESTAPP_CLUSTERID,553.3,554.t heMessageData,555.&TestApp_TransID,556.A F_DISCV_ROUTE, AF_DEFAULT_RADIUS ) == afStatus_SUCCESS )557.{558.// Successfully requested to be sent.559.}560.e lse561.{562.// Error occurred in request to send.563.}564.}565.566./********************************************************************* 567.*********************************************************************/ 568.s tatic void rxCB(uint8 port, uint8 event)569.{570.u int8 Uartbuf[80];571.u int8 buffer;572.s tatic unsigned char LEDState[5];573.b ool result = false;574.i f((event &(HAL_UART_RX_FULL|HAL_UART_RX_ABOUT_FULL|HAL_UART_RX_TIMEOUT)) && 575.#if SERIAL_APP_LOOPBACK576.(SerialApp_TxLen < SERIAL_APP_TX_MAX))577.#else578.!SerialApp_TxLen)579.#endif580.{581.S erialApp_TxLen = HalUARTRead(0, Uartbuf, 2);582.583.o sal_memcpy(&buffer, Uartbuf, 1);584.b uffer -=0x30;585.s witch(buffer)586.{587.c ase 0:588.H alLedSet(HAL_LED_1, HAL_LED_MODE_ON);589.r esult = true;590.b reak;591.c ase 1:592.H alLedSet(HAL_LED_2, HAL_LED_MODE_ON);593.r esult = true;594.b reak;595.c ase 2:596.H alLedSet(HAL_LED_3, HAL_LED_MODE_ON);597.r esult = true;598.b reak;599.c ase 3:600.H alLedSet(HAL_LED_ALL, HAL_LED_MODE_ON);601.r esult = true;602.b reak;603.c ase 4:604.H alLedSet(HAL_LED_1, HAL_LED_MODE_OFF);605.r esult = true;606.b reak;607.c ase 5:608.H alLedSet(HAL_LED_2, HAL_LED_MODE_OFF);609.r esult = true;610.b reak;611.c ase 6:612.H alLedSet(HAL_LED_3, HAL_LED_MODE_OFF);613.r esult = true;614.b reak;615.c ase 7:616.H alLedSet(HAL_LED_ALL, HAL_LED_MODE_OFF);617.r esult = true;618.b reak;619.}620.i f(result)621.{622.H alUARTWrite(0, "success\r\n", 9);623.}624.e lse625.{626.H alUARTWrite(0, "failed\r\n", 8);627.}628.S erialApp_TxLen = 0;629.}630.}只需查看TestApp_Init()以及rxCB()函数即可,在TestApp_Init()函数中对串口0进行配置,在rxCB()函数中对接收到的数据进行解析并对LED资源做出相应的处理。
开源:安卓手机app控制arduino,通过esp8266

开源:安卓⼿机app控制arduino,通过esp8266⽬录第⼀、先上效果图具体连接:ESP8266-01 ----------arduino3.3v-------------3.3VGND-----------GNDEN--------------3.3VTX-------------pin13RX----------------pin12第⼆、原理讲解原理简述:利⽤发布订阅模式。
第⼀步,新建主题,第⼆步,arduino通过esp8266订阅这个主题。
第三步、通过app往这个主题发消息。
由于单⽚机订阅了这个主题,所以可以实时收到发往这个主题的消息。
从⽽达到通过app或者微信⼩程序控制arduino单⽚机的⽬的。
关于发布订阅:订阅(订阅):订阅给定的⼀个主题。
发布(发布)将信息发送到指定的主题。
只有订阅该主题的设备才可以收到发往该主题的消息。
通俗的来讲:就是像博客订阅的场景,什么意思呢,也就是说100个⼈订阅了你的博客,如果博主发表了⽂章,那么100个⼈就会同时收到通知邮件,订阅/发布模式就是这样的原理。
如果还不理解的话再通俗讲⼀下,就像⽣活中听收⾳机,要想听收⾳机,肯定就是调频啦,只有在正确的频道上⾯,我们才能听得到好听的节⽬,所以说订阅⾸先要订阅⼀个频道/主题,只有订阅了该主题,我们才能收到发往该频道/主题的消息。
在本例程中,arduino借助ESP8266订阅主题,app订阅或者⼩程序发布消息,arduino会实时收到消息,就可以实时控制arduino了。
第三、下载程序到arduino开发环境:arduino IDEesp8266-01不需要编程。
arduino ⽰例程序下载:注意:上传程序的时候,需断开arduino 和esp8266的连线,不然会下载失败。
程序说明,波特率9600由于ESP8266-01默认波特率是115200,需要先⼿动调节esp8266-01的波特率为9600,115200波特率过⾼会乱码。
Android驱动开发实例(控制LED灯)

Android驱动例子(LED灯控制)本例子,讲述在Android2.1上完全自已开发一个驱动去控制硬件口并写应用测试该驱动,通过这样一个例子,解析android下的驱动开发流程的应用调用流程,可以说是很好的入门引导要达到的效果:通过Android的应用,调用驱动程序,在开发板上控制4个LED的亮灭。
一、硬件原理如上图,通过4个IO口控制这LED,低电平LED亮,这4个IO口分别是GPM1, GPM2, GPM3, GPM4,二、驱动程序1、在kernel文件夹下的driver目录,新键驱动文件夹# cd kernel_Android_2.6.28.6/drivers进到开发板的kernel目录,建驱动文件夹#mkdir ledtest2、在/driver/ledtest目录下,新建leddriver.c ,leddriver.h , Kconfig, Makefile 等4个文件leddriver.cleddriver.c1.#include<linux/kernel.h>2.#include<linux/sched.h>3.#include<linux/timer.h>4.#include<linux/init.h> /* For __init/__exit/... */5.#include<linux/module.h>6.#include<mach/hardware.h>7.#include<asm/io.h>8.#include<asm/uaccess.h>9.#include<plat/gpio-cfg.h>10.#include<plat/regs-clock.h>11.#include<plat/regs-lcd.h>12.#include<plat/regs-gpio.h>13.#include<mach/map.h>14.#include<linux/gpio.h>15.#include<plat/gpio-bank-m.h>16.#include<linux/cdev.h>17.#include<linux/fs.h>//for register_chrdev()18.#include<linux/device.h>19.#include<mach/map.h>20.#include"leddriver.h"21.#include<linux/miscdevice.h> /* For MODULE_ALIAS_MISCDEV22.(WATCHDOG_MINOR) */23.#include<linux/watchdog.h> /* For the watchdog specific items */24.#include<linux/fs.h> /* For file operations */25.#define Viberator_MAJOR 97 //?÷éè±?o?26.#define SCULL_NR_DEVS 427.#define SCULL_QUANTUM 400028.#define SCULL_QSET 100029.//---do as the GIO driver30.#define DEVCOUNT 431.#define GIO_MINOR 2 /* GIO minor no. */32.static dev_t dev; //éê ?? μ?μ??÷ éè±? o?33.static struct cdev *cdev_p;34.static int openCnt;35.//--è±?á?------------36.int VIB_major = 97;//we asigment it for test37.int VIB_minor = 0;38.int VIB_nr_devs = SCULL_NR_DEVS;39.int VIB_quantum = SCULL_QUANTUM;40.int VIB_qset = SCULL_QSET;41.42.static struct class *vib_dev_class;43.#define GPNCON S3C64XX_GPNCON44.#define GPNDAT S3C64XX_GPNDAT45.#define GPNPUD S3C64XX_GPNPUD46.#define GPMCON S3C64XX_GPMCON47.#define GPMDAT S3C64XX_GPMDAT48.#define GPMPUD S3C64XX_GPMPUD49.50.#define VIB_ON 0x1151.#define VIB_OFF 0x2252.static const struct file_operations GPIO_Viberator_ctl_ops={53. .owner = THIS_MODULE,54. .open = GPIO_VIB_open,55. .read =GPIO_VIB_read,56. .write =GPIO_VIB_write,57. .ioctl = GPIO_VIB_ioctl,58. .release =GPIO_VIB_release,59.};60.ssize_t GPIO_VIB_read(struct file * file,char * buf,size_t count,loff_t * f_ops)61.{62. printk(" GPIO_VIB_read \r\n");63. gpio_direction_output(S3C64XX_GPM(3), 0);//64.return count ;65.}66.ssize_t GPIO_VIB_write (struct file * file,const char * buf, size_t count,loff_t * f_ops)67.{68. printk(" GPIO_VIB_write \r\n");69. gpio_direction_output(S3C64XX_GPM(3), 1);//70.return count;71.}72.73.//ssize_t GPIO_VIB_ioctl(struct inode * inode,struct file * file,unsigned intcmd, long data)74.static int GPIO_VIB_ioctl(struct inode *inode, struct file *file, unsigned intcmd, unsigned long arg)75.{76. printk(KERN_ERR"VIB:GPIO_VIB_ioctl --CMD=%x \n",cmd);77.switch(cmd)78. {79.case VIB_ON:80. gpio_direction_output(S3C64XX_GPM(1), 0);//81. gpio_direction_output(S3C64XX_GPM(2), 0);//82. gpio_direction_output(S3C64XX_GPM(3), 0);//83. gpio_direction_output(S3C64XX_GPM(4), 1);//84. printk(KERN_ERR"VIB:GPIO_VIB_ioctl --VIB_ON\n");85.break;86.case VIB_OFF:87. {88. printk(KERN_ERR"VIB:GPIO_VIB_ioctl --VIB_OFF\n");89. gpio_direction_output(S3C64XX_GPM(1), 1);//90. gpio_direction_output(S3C64XX_GPM(2), 1);//91. gpio_direction_output(S3C64XX_GPM(3), 1);//92. gpio_direction_output(S3C64XX_GPM(4), 0);//93.break;94. }95.default:break;96.97. }98.//gpio_free(S3C64XX_GPN(7));99.}100.ssize_t GPIO_VIB_open(struct inode * inode,struct file * file)101.{102.//?£?éêy103.//MOD_INC_USE_COUNT;104. printk("GPIO_VIB_open() \n");105.return 0;106.}107.ssize_t GPIO_VIB_release(struct inode * inode, struct file * file) 108.{109.// MOD_DEC_USE_COUNT;//?£?éêy??110. printk("GPIO_VIB_release() \n");111.return 0;112.}113.static int GPIO_VIB_CTL_init(void)114.{115.int ret = -ENODEV;116.int error ;117. printk("---------------------------------------------- \r\n"); 118.//3?ê??ˉú119. s3c_gpio_cfgpin(S3C64XX_GPM(1), S3C_GPIO_SFN(1));//GPM1 output 120. s3c_gpio_cfgpin(S3C64XX_GPM(2), S3C_GPIO_SFN(1));//GPM2 output 121. s3c_gpio_cfgpin(S3C64XX_GPM(3), S3C_GPIO_SFN(1));//GPM3 output 122. s3c_gpio_cfgpin(S3C64XX_GPM(4), S3C_GPIO_SFN(1));//GPM4 output 123.#if 1 /*?2ì?·?ê?×¢2á?y?ˉ*/124.ret = register_chrdev(Viberator_MAJOR, "viberator", &GPIO_Viberator_ct l_ops);125.if (ret < 0) {126. printk(KERN_ERR "VIB: unable to get major %d\n", ret);127.return ret;128.}129.//′′?¨\uc1class130.vib_dev_class = class_create(THIS_MODULE, "viberator");131.if (IS_ERR(vib_dev_class)) {132. unregister_chrdev(Viberator_MAJOR, "capi20");133.return PTR_ERR(vib_dev_class);134.}135.//′′?¨?úμ?£?136.device_create(vib_dev_class, NULL, MKDEV(Viberator_MAJOR, 0), NULL, "vi b");137.// create a point under /dev/class/vib138.//í¨1yéaá?2?£??y?ˉ?ó??oó£??í?á?ú/dev/class/éú3é\uc1vib?úμ?£?ó|ó?3ìDò?éò2ù×÷tù2ù×÷?aúμ?£?í¨1y\uc1open ,write,read μèoˉêy2ù×÷£??ê?é?éò??′oó??μ?ó|ó?ê?ày3ìDò?£139.return 0;140.#endif141.#if 0/* ×¢2á?ˉì?*/142.if ((error = alloc_chrdev_region(&dev, 0, DEVCOUNT, "vibrate")) < 0)143. {144. printk(KERN_ERR145."VIB: Couldn't alloc_chrdev_region, error=%d\n",146. error);147.return 1;148. }149. printk("dev = %d \n",dev);150. cdev_p = cdev_alloc();151. cdev_p->ops = &GPIO_Viberator_ctl_ops;152. error = cdev_add(cdev_p, dev, DEVCOUNT);153.if (error) {154. printk(KERN_ERR155."VIB: Couldn't cdev_add, error=%d\n", error);156.return 1;157. }158.159. vib_dev_class = class_create(THIS_MODULE, "vib-dev");160.if (IS_ERR(vib_dev_class)) {161. res = PTR_ERR(vib_dev_class);162.goto out_unreg_class;163. }164.return 0;165.#endif166.out_unreg_class:167. class_destroy(vib_dev_class);168.return 1;169.}170.171.static int __init S3C6410_VIB_init(void)172.{173.int ret = -ENODEV;174.//μ÷ó?oˉêy175. printk(KERN_ERR "Auly: S3C6410_VIB_init---\n");176. ret = GPIO_VIB_CTL_init();177.if(ret)178. {179. printk(KERN_ERR "Auly: S3C6410_VIB_init--Fail \n"); 180.return ret;181. }182.return 0;183.}184.static void __exit cleanup_GPIO_VIB(void)185.{186.//×¢?úéè±?187.// devfs_unregister_chrdev(Viberator_MAJOR,"gpio_vib_ctl"); 188.#if 0189. cdev_del(cdev_p);190. unregister_chrdev_region(dev, DEVCOUNT);191. class_destroy(vib_dev_class);192.#endif193.device_destroy(vib_dev_class, MKDEV(Viberator_MAJOR, 0)); 194.class_destroy(vib_dev_class);195.unregister_chrdev(Viberator_MAJOR, "viberator");196.}197.MODULE_LICENSE("GPL");198.MODULE_DESCRIPTION("Peter first driver");199.MODULE_ALIAS_CHARDEV(Viberator_MAJOR, 0);200.201.module_init(S3C6410_VIB_init);202.module_exit(cleanup_GPIO_VIB);leddriver.h文件1.ssize_t GPIO_VIB_read(struct file * file,char * buf,size_t count,loff_t * f_ops);2.ssize_t GPIO_VIB_write (struct file * file,const char * buf, size_t count,loff_t * f_ops);3.static int GPIO_VIB_ioctl(struct inode *inode, struct file *file, unsigned intcmd, unsigned long arg);4.ssize_t GPIO_VIB_open(struct inode * inode,struct file * file);5.ssize_t GPIO_VIB_release(struct inode * inode, struct file * file);6.static int GPIO_VIB_CTL_init(void);Kconfig 文件1.config LEDTEST2. tristate "LED test for ARMeasy"3.default n4. help5.this is a LED driver for ARMEASY with S3C6410Makefile文件1.obj-$(CONFIG_LEDTEST)+=leddriver.o3、在内核配置里菜单里加入本驱动的配置项达到的效果是,可以通过内核配置来选择是否把本驱动编译进内核里,也就是出现在make menuconfig 后出来的界面里,可以参考9.8章<Android添加新驱动方法>1)在arch/arm/Kconfig文件里menu "Device Drivers"与endmenu之间添加1.source "drivers/ledtest/Kconfig"2)在drivers/Kconfig menu "Device Drivers" 和endmenu之间添加1.source "drivers/ledtest/Kconfig"3)修改/drivers/Makefile文件1.Obj-$(CONFIG_LEDTEST) +=ledtest/4、编译驱动在kernel目录下,终端输入1.#make menuconfig“Device Drivers” 下面会看到“LED test for ARMeasy”,选择它,保存并退出1.#make这样,就会在/drivers/ledtest目录下得到leddrivr.ko文件,它就是驱动目标文件,已级编译进了zImage 里了,只要用这个kernel烧录到开发板,开机就会自动加载本驱动,PS,如果发现如上编译,没有在ledtest目录下生成leddriver.ko文件,也就是本根没有去编译本驱动,那就把ledtest目录入到/drivers/misc目录下,相应的修改misc下面,然后,在makefile里,不用选直接写成obj-y += leddriver.o,这样强制的包含进去编译。
gpio控制npn三极管

gpio控制npn三极管摘要:1.GPIO 简介2.NPN 三极管简介3.GPIO 控制NPN 三极管的方法4.应用实例正文:1.GPIO 简介GPIO(General Purpose Input/Output,通用输入/输出)是微控制器(MCU)上的一个重要外设,它可以根据程序的设置,实现输入或输出功能。
GPIO口可根据需要配置为输入、输出、复用等多种模式,具有较高的灵活性。
2.NPN 三极管简介PN 三极管是一种双极型晶体管,由两个n 型半导体(发射极和集电极)和一个p 型半导体(基极)组成。
它具有三个引脚,分别是发射极、基极和集电极。
NPN 三极管广泛应用于信号放大、开关控制等电子电路中。
3.GPIO 控制NPN 三极管的方法GPIO 控制NPN 三极管的方法主要有两种:一种是通过GPIO 输出高电平或低电平,直接驱动三极管的基极;另一种是通过GPIO 产生脉冲信号,控制三极管的开关状态。
对于第一种方法,当GPIO 输出高电平时,三极管导通,集电极与发射极之间的电阻很小;当GPIO 输出低电平时,三极管截止,集电极与发射极之间的电阻很大。
因此,可以通过设置GPIO 的输出电平,实现对NPN 三极管的控制。
对于第二种方法,当GPIO 输出脉冲信号时,可以通过改变脉冲的占空比,控制三极管的导通与截止时间,从而实现对NPN 三极管的控制。
4.应用实例在实际应用中,GPIO 控制NPN 三极管可以用于许多场景,例如LED 灯的控制、蜂鸣器的控制、电机的控制等。
以LED 灯的控制为例,通过GPIO 输出高电平,可以使LED 灯点亮;通过GPIO 输出低电平,可以使LED 灯熄灭。
综上所述,GPIO 作为一种通用输入/输出设备,可以方便地控制NPN 三极管,实现对各种电子设备的控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于Android平台的GPIO操控方法
作者:李文钊
来源:《数字技术与应用》2013年第11期
摘要:系统地介绍在Google的Android操作平台上,如何实现对嵌入式系统的通用I/O端口GPIO进行操作与控制的方法。
关键词:Android平台 Java语言 JNI GPIO
中图分类号:TP391 文献标识码:A 文章编号:1007-9416(2013)11-0151-02
1 引言
现代控制技术和微计算机技术的飞速发展,给工业控制系统赋予了更多的新内容,它正开始朝着网络化、数字化、一体化和智能化的方向发展。
基于嵌入式操作系统和嵌入式微处理器的控制系统具有体积小、性能优越、功耗低、可靠性高、开发周期短以及交互界面友好等的优点,它正逐渐地被广泛应用到工业控制领域。
由Google公司开的Android操作系统是新一代嵌入式操作系统,它正在随着其在移动通信领域的成功应用,而逐步向工业控制领域普及。
笔者在学习了java语言程序设计后,编写一些java GUI(GraphicalUserInterface)程序并在Android平台上运行成功。
考虑到当前基于Android平台的嵌入式工业控制的乐观的应用前景,更加引起我对基于Android应用的浓厚兴趣,促使我对基于Android应用的更加深入地学习与研究。
GPIO(General-Purpose Input/Output Ports)通用可编程I/O端口,是嵌入式系统在工业控制中最为常用的端口,它提供对控制对象的开/关两种状体的操作。
对GPIO的操控在工控领域有着非常重要的意义。
本文将结合笔者的学习与实践,对Android平台的GPIO操控方法进行全面的介绍。
2 Android系统架构
Android的系统架构和其它很多操作系统一样,也是采用分层架构。
图1为Android官方公布的架构图。
从图中可以看出,Android系统架构为四层结构,从底层到顶层分别是Linux 内核层、系统运行库层、应用程序框架层和应用程序层。
其中,Linux内核层,Android是基于Linux2.6内核,其核心系统服务如安全性、内存管理、进程管理、网路协议以及驱动模型都由Linux内核层来完成,嵌入式系统的GPIO等硬件接口操作也是在这一层实现的。
系统运行库层是系统库和Android运行时的环境构成,系统库是连接应用程序框架层与Linux内核层的重要环节,Android应用程序时采用Java语言编写,程序在Android运行时中执行,其运行时分为核心库和Dalvik虚拟机两部分。
应用程序框架层
是Android开发的基础,Google核心应用程序也是通过这一层来实现其具体功能的,它可以实现组件的重用,我们可以直接使用其提供的组件来进行快速的应用程序开发,也可以通过继承而实现自己应用程序的个性化拓展。
应用层程序是用跨平台的Java语言编写的,用户和嵌入式系统的交互GUI也是在这一层。
3 Java和JNI
Java是一种跨平台的面向对象的程序设计语言。
在Android平台上的用户和嵌入式系统的交互GUI等都是用Java编写的。
由于它是跨平台程序设计语言,用它编写的程序就可以在任何计算机操作系统下运行,这也是Java最大的优点。
然而,对于千差万别的操作平台和硬件系统它是如何实现的呢,尤其,本文所研究的对硬件的接口GPIO的操作又是如何实现的呢,前者,限于篇幅且文献很多,不必详述;后者,就涉及到JNI。
JNI(Java Native Interface)为JAVA本地调用,它能够实现Java代码和其他语言编写的代码进行交互。
从图1 Android的系统架构图可以看出,Android是基于Linux2.6内核的,对硬件的操作也即是Linux下C/C++等语言实现的对硬件的操作,Java通过JNI和它进行交互。
如图2所示。
4 GPIO及其在linux下的操作
嵌入式微处理器上的一个GPIO端口至少需要两个寄存器,一个做控制用的“通用IO端口控制寄存器”,还有一个是存放数据的“通用I/O端口数据寄存器”。
数据寄存器的每一位是和GPIO的硬件引脚对应的,而数据的传递方向是通过控制寄存器设置的,通过控制寄存器可以设置每一位引脚的数据流向。
我们以S3c2440为例,GPIO寄存器及其定义为:
GPXCON:控制寄存器,每两位配置一个管脚,00为输入,01为输出;
GPXDAT:数据寄存器,每一位表示对应管脚的状态,0为低电平,1为高电平;
GPXUP:设置管脚的上拉电阻,每一位对应一个管脚,0为使能,1为禁止。
下面以管脚GPB5设置为输入、设置为输出并置高低电平为例加以说明。
6 结语
本文是在实习老师的指导下结合自己具体的实验完成的。
在实验过程中得到各方面的帮助,在此表示由衷谢意。
Android平台对底层硬件的操作在工业控制方面有着非常重要的意义,本文正是针对这一问题,从最基本的GPIO端口操作入手,系统地介绍了JAVA的JNI调用、Linux对GPIO的具体操作以及它们之间参数的传递。
参考文献
[1]靳岩,姚尚朗.Google Android开发入门与实践.北京:人民邮电出版社,2009.
[2]李涛.等.嵌入式Linux中GPIO驱动程序开发.仪表技术,2009年06期.
[3]任俊伟,林东岱.JNI技术实现跨平台开发的研究.计算机应用研究,2005年07期.
[4]赵亮,张维.基于Android技术的界面设计与研究.电脑知识与技术,2009年29期.
[5]廖原.嵌入式Linux技术[N].中国计算机报,2000年.。