基于双向数据总线的控制系统设计
I2C通讯协议(中文译版)I2C_Spec
1.1 版本 1.0-1992 .................................................................................................................... 3 1.2 版本 2.0-1998 .................................................................................................................... 3 1.3 版本 2.1-2000 .................................................................................................................... 3 1.4 购买 Philips 的 I2C 总线元件 .............................................................................................. 3
计算机组成原理第六章总线系统

数据传送以字符为单位,字符之间没 有固定的时间间隔,发送方和接收方 不需要使用相同的时钟信号。
总线的仲裁机制
集中仲裁
使用一个中央仲裁器来管理总线的访问,例如:计数器、链表或优先级队列。
分布仲裁
没有中央仲裁器,而是通过硬件电路或软件算法来实现总线的访问控制。
总线的数据传输方式
并行传输
数据在多个通道上同时传输,每个通道传输一部分数据。
确定总线的控制方式
根据总线上主设备和从设备的数量和通信需求,选择合适的总线控制 方式,如同步控制或异步控制。
确定总线的仲裁方式和优先级
根据总线上主设备的数量和通信需求,设计合适的仲裁方式和优先级 确定机制。
硬件实现
选择合适的芯片和元件
01
根据设计需求,选择合适的芯片和元件来实现总线系统的硬件
部分。
计算机组成原理第六章总线 系统
• 总线系统的概述 • 总线的基本工作原理 • 常见总线系统介绍 • 总线系统的应用与发展 • 实验与实践:设计一个简单的总线
系统
01
总线系统的概述
总线的定义与分类
定义
总线是连接多个部件的信息传输 线,是多个部件共享的传输介质 。
分类
根据传输方式,总线可分为单向 总线和双向总线;根据连接的部 件数目,总线可分为局部总线和 系统总线。
THANKS
感谢观看
总线系统的基本组成
总线控制器
负责协调各个部件的通信,管 理总线的使用。
数据总线
用于传输数据,通常由双向线 组成。
地址总线
用于传输地址信息,确定要访 问的内存单元或I/O端口。
控制总线
用于传输控制信号,如读写信 号、中断信号等。
基于串口通信的控制系统设计

基于串口通信的控制系统设计引言:串口通信是一种常用的通信方式,广泛应用于控制系统中。
串口通信可以通过一根串行连接线来实现设备之间的数据交换,具有简单、可靠、成本低的特点。
本文将介绍一个基于串口通信的控制系统的设计,涵盖了硬件组成、通信协议、系统功能以及实现方法等方面。
一、硬件组成:1.主控板:主控板负责整个控制系统的运行和数据处理,通过串口与其他设备进行通信。
主控板可以使用单片机、嵌入式系统或者其他类似的控制器。
2.外设设备:外设设备可以包括传感器、执行器、显示器等,用于感知环境、执行控制命令以及显示系统状态等。
3.串口模块:串口模块用于实现主控板与其他设备之间的串口通信,可以是硬件串口(如UART)或者是通过软件模拟的串口。
4.串口连接线:串口连接线用于连接主控板与其他设备,通常采用DB9或者RJ45等接口标准。
二、通信协议:为了实现可靠的串口通信,需要定义一种通信协议。
通信协议包括数据格式、校验方法、命令集等。
1.数据格式:通信中的数据可以分为命令数据和应答数据两种类型。
命令数据是主控板发送给外设设备以执行控制命令;应答数据是外设设备发送给主控板以回应控制命令执行结果。
数据格式可以采用二进制、文本等形式。
通常,在数据头部定义标识位,用于标志数据的开始和结束。
2.校验方法:为了保证数据传输的可靠性,通信协议通常会采用一种校验方法来检测和纠正错误。
常见的校验方法有奇偶校验、循环冗余校验(CRC)等。
校验位的计算通常是在发送端进行,接收端通过比对校验位来判断数据是否正确。
3.命令集:通信协议中定义了一组命令,用于控制外设设备的行为。
命令可以包括读取传感器数值、设置执行器状态、查询系统状态等功能。
三、系统功能:1.数据采集:控制系统可以通过串口接收传感器的数据,并将数据发送给主控板进行处理。
主控板可以根据传感器数据进行控制决策,从而实现对外设设备的控制。
2.控制命令传输:主控板可以通过串口发送控制命令给外设设备,以改变其状态或执行特定的操作。
最新电气自动化毕业设计论文题目

电气类专业毕业设计课题
184. 全氢煤气罩式炉的温度控制系统的研究与改造 185. 基于 ATmega16 单片机的高炉透气性监测仪表的设计 186. 基于 MSP430 的智能网络热量表 187. 火电厂石灰石湿法烟气脱硫的控制 188. 家用豆浆机全自动控制装置 189. 新型起倒靶控制系统的设计与实现 190. 软开关技术在变频器中的应用 191. 中频感应加热电源的设计 192. 智能小区无线防盗系统的设计 193. 智能脉搏记录仪系统 194. 直流开关稳压电源设计 195. 用单片机实现电话远程控制家用电器 196. 无线话筒制作 197. 温度检测与控制系统 198. 数字钟的设计 199. 汽车尾灯电路设计 200. 篮球比赛计时器的硬件设计
4
电气类专业毕业设计课题
140. 交流接触器自动化生产流水线设计 141. 63A 三极交流接触器设计 142. 100A 交流接触器设计 143. CJ20—40 交流接触器工艺及工装设计 144. JSS 型数字式时间继电器设计 145. 半导体脱扣器的设计 146. 12A 交流接触器设计 147. CJ20-100 交流接触器装配线设计 148. 真空断路器的设计 149. 总线式智能 PID 控制仪 150. 自动售报机的设计 151. 小型户用风力发电机控制器设计 152. 断路器的设计 153. 基于 MATLAB 的水轮发电机调速系统仿真 154. 数控缠绕机树脂含量自控系统的设计 155. 软胶囊的单片机温度控制(硬件设计) 156. 空调温度控制单元的设计 157. 基于人工神经网络对谐波鉴幅 158. 基于单片机的鱼用投饵机自动控制系统的设计 159. 基于 MATLAB 的调压调速控制系统的仿真研究 160. 锅炉汽包水位控制系统 161. 基于单片机的无刷直流电机控制系统设计 162. 煤矿供电系统的保护设计——硬件电路的设计 163. 煤矿供电系统的保护设计——软件设计 164. 大容量电机的温度保护——软件设计 165. 大容量电机的温度保护 ——硬件电路的设计 166. 模块化机器人控制器设计 167. 电子式热分配表的设计开发 168. 中央冷却水温控制系统 169. 基于单片机的玻璃管加热控制系统设计 170. 基于 AT89C51 单片机的号音自动播放器设计 171. 基于单片机的普通铣床数控化设计 172. 基于 AT89C51 单片机的电源切换控制器的设计 173. 基于 51 单片机的液晶显示器设计 174. 手机电池性能检测 175. 自动门控制系统设计 176. 汽车侧滑测量系统的设计 177. 超声波测距仪的设计及其在倒车技术上的应用 178. 篮球比赛计时器设计 179. 基于单片机控制的红外防盗报警器的设计 180. 智能多路数据采集系统设计 181. 继电器保护毕业设计 182. 电力系统电压频率紧急控制装置研究 183. 用单片机控制的多功能门铃
基于RS232实时在线多点温度测控系统的设计
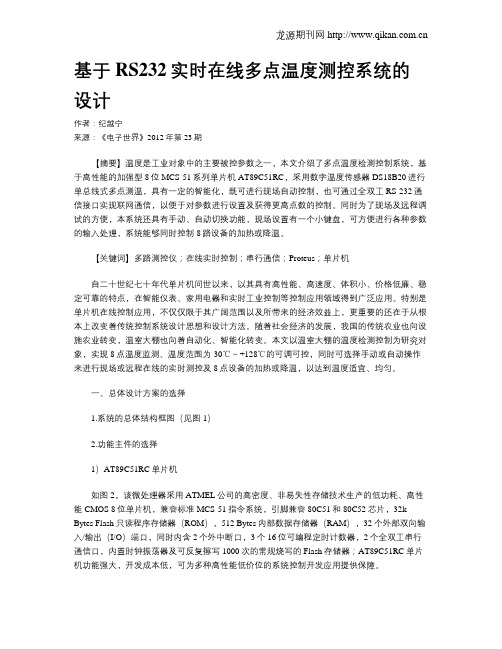
基于RS232实时在线多点温度测控系统的设计作者:纪越宁来源:《电子世界》2012年第23期【摘要】温度是工业对象中的主要被控参数之一,本文介绍了多点温度检测控制系统,基于高性能的加强型8位MCS-51系列单片机AT89C51RC,采用数字温度传感器DS18B20进行单总线式多点测温,具有一定的智能化,既可进行现场自动控制,也可通过全双工RS-232通信接口实现联网通信,以便于对参数进行设置及获得更高点数的控制。
同时为了现场及远程调试的方便,本系统还具有手动、自动切换功能,现场设置有一个小键盘,可方便进行各种参数的输入处理,系统能够同时控制8路设备的加热或降温。
【关键词】多路测控仪;在线实时控制;串行通信;Proteus;单片机自二十世纪七十年代单片机问世以来,以其具有高性能、高速度、体积小、价格低廉、稳定可靠的特点,在智能仪表、家用电器和实时工业控制等控制应用领域得到广泛应用。
特别是单片机在线控制应用,不仅仅限于其广阔范围以及所带来的经济效益上,更重要的还在于从根本上改变着传统控制系统设计思想和设计方法。
随着社会经济的发展,我国的传统农业也向设施农业转变,温室大棚也向着自动化、智能化转变。
本文以温室大棚的温度检测控制为研究对象,实现8点温度监测、温度范围为-30℃~+128℃的可调可控,同时可选择手动或自动操作来进行现场或远程在线的实时测控及8点设备的加热或降温,以达到温度适宜、均匀。
一、总体设计方案的选择1.系统的总体结构框图(见图1)2.功能主件的选择1)AT89C51RC单片机如图2,该微处理器采用ATMEL公司的高密度、非易失性存储技术生产的低功耗、高性能CMOS 8位单片机,兼容标准MCS-51指令系统,引脚兼容80C51和80C52芯片,32k Bytes Flash只读程序存储器(ROM),512 Bytes内部数据存储器(RAM),32个外部双向输入/输出(I/O)端口,同时内含2个外中断口,3个16位可编程定时计数器,2个全双工串行通信口,内置时钟振荡器及可反复擦写1000次的常规烧写的Flash存储器;AT89C51RC单片机功能强大,开发成本低,可为多种高性能低价位的系统控制开发应用提供保障。
汽车CAN总线详细教程

◆1992年,CIA(CAN in Automation)用户组织成立,之 后制定了第一个CAN应用层“CAL”。 ◆ 1994年开始有了国际CAN学术年会(ICC)。 ◆ 1994年美国汽车工程师协会以CAN为基础制定了 SAEJ1939标准,用于卡车和巴士控制和通信网络。 ◆ 到今天,几乎每一辆欧洲生产的轿车上都有CAN;高级客 车上有两套CAN,通过网关互联;1999年一年就有近6千万个 CAN控制器投入使用;2000年销售1亿多CAN的芯片;2001 年用在汽车上的CAN节点数目超过1亿个 。 ◆ 但是轿车上基于CAN的控制网络至今仍是各大公司自成系 统,没有一个统一标准。
(6)通信速率最高可达1MB/s(此时距离最长40m)。
(7)节点数实际可达110个。
(8)采用短帧结构,每一帧的有效字节数为8个。
(9)每帧信息都有CRC校验及其他检错措施,数据出错率极低。
(10)通信介质可采用双绞线,同轴电缆和光导纤维,一般采用 廉价的双绞线即可,无特殊要求。
(11) 节点在错误严重的情况下,具有自动关闭总线的功能,切 断它与总线的联系,以使总线上的其他操作不受影响。
带有三个中央控制单元和总线系统的车
带有三个中央控制单元的CAN驱动网络
车用网络发展原因
电子技术发展----线束增加 线控系统(X-BY-WIRE) 计算机网络的广泛应用 智能交通系统的应用
汽车发展带来的问题
(1)汽车电子技术的发展汽车上电子装置越来 越多汽车的整体布置空间缩小
(2)传统电器设备多为点到点通信导致了庞大 的线束
(3)大量的连接器导致可靠性降低。 粗大的线束与汽车中有限的可用空间之间的矛
盾越来越尖锐,电缆的体积、可靠性和重量成为越 来越突出的问题,而且也成为汽车轻量化和进一步 电子化的最大障碍,汽车的制造和安装也变得非常 困难。 (4)存在冗余的传感器。
CAN总线的双机冗余系统设计
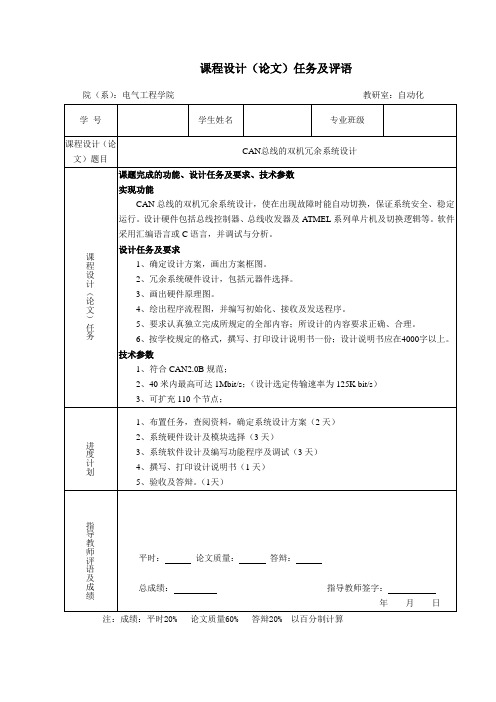
课程设计(论文)任务及评语院(系):电气工程学院 教研室:自动化 注:成绩:平时20% 论文质量60% 答辩20% 以百分制计算学 号学生姓名 专业班级 课程设计(论文)题目CAN 总线的双机冗余系统设计 课程设计(论文)任务课题完成的功能、设计任务及要求、技术参数 实现功能CAN 总线的双机冗余系统设计,使在出现故障时能自动切换,保证系统安全、稳定运行。
设计硬件包括总线控制器、总线收发器及ATMEL 系列单片机及切换逻辑等。
软件采用汇编语言或C 语言,并调试与分析。
设计任务及要求1、确定设计方案,画出方案框图。
2、冗余系统硬件设计,包括元器件选择。
3、画出硬件原理图。
4、绘出程序流程图,并编写初始化、接收及发送程序。
5、要求认真独立完成所规定的全部内容;所设计的内容要求正确、合理。
6、按学校规定的格式,撰写、打印设计说明书一份;设计说明书应在4000字以上。
技术参数1、符合CAN2.0B 规范;2、40米内最高可达1Mbit/s ;(设计选定传输速率为125K bit/s )3、可扩充110个节点;进度计划1、布置任务,查阅资料,确定系统设计方案(2天)2、系统硬件设计及模块选择(3天)3、系统软件设计及编写功能程序及调试(3天)4、撰写、打印设计说明书(1天)5、验收及答辩。
(1天) 指导教师评语及成绩 平时: 论文质量: 答辩: 总成绩: 指导教师签字: 年 月 日摘要CAN总线的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。
现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。
它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持。
随着功能强大的单片机在控制领域应用的不断深入,容错控制系统也在不断地发展,在一些特定的场合下,如在航空航天、军事、铁路、石油、化工、电力等重要部门和在恶劣工作环境下工作的计算机控制系统,对系统安全性、可靠性、可用性的要求更高。
基于现场总线技术的分布式控制系统的设计与实现

作者简介 :柴宝仁 .男.15 98年生.高级讲师,主要从事计算机控制应用软件开发研究。
维普资讯
・
4 2・
齐 齐 哈 尔 大 学 学 报
20 0 6矩
定的控制曲线对被控对象进行控制 ,定期将实时参数上传给上位机。
中图分类号 :T 3 6 P 1. 4
随着现代工业的飞速发展和生产装置规模的不断扩大 , 生产过程 日 趋复杂 ,对企业生产 自动化和各种 信息的集成要求越来越高。对 自动化的要求 已不仅是保持个别变量的稳定,而且要求实现多个变量的最优 控制。分析和设计最优控制系统已成为现代控制理论的基本内容 , 对于复杂的控制对象 ,由于它们往往同
线 ,对数据进行定期保存并实现历史数据的查询。
同时监控微机还能对实际控制曲线和理想控制曲线 进行显示对 比, 并分析误差 , 并能逐步找出各个控 制节点的最佳控制曲线 。监控微机通过一块 Ln o— Wok 适配器连接到总线上 ,通过 D ESr r rs D e e与网 v
络通信以实现对网络运行状况的监测 。
时,并行 , 独立工作 ,控制对象分布面很广,因此把它们联系起来实现分布式控制是现代控制技术 中的重
要发展方向 分布式控制系统具有可靠高 、速度快 、系统模块化 、价格低 、设计开发相对简单 ,人们越来
越多地把原来使用计算机进行的集 中式控制系统改为分布式控制系统 。但是分布式控制系统的开发一直没
基 于现 场 总线 技 术 的分布 式控 制 系统 的设计 与实现
柴宝仁 许维平 。
(. 1 齐齐哈尔大学应用技术学院 ,齐齐哈尔 110 ;2齐齐哈尔大学计算机与工程学 院 ,齐齐哈尔 1 10 606 . 6 0 6)
I2C设计

四、总线的寻址 I2C总线协议有明确的规定:采用7位的寻址字节 (寻址字节是起始信号后的第一个字节)。 (1)寻址字节的位定义
D7~D1位组成从机的地址。D0位是数据 传送方向位,为“0”时表示主机向从机写数 据,为“1”时表示主机由从机读数据。
Байду номын сангаас
�主机发送地址时,总线上的每个从机都将这7 位地址码与自己的地址进行比较,如果相同, 则认为自己正被主机寻址,根据R/位将自己确 定为发送器或接收器。 �从机的地址由固定部分和可编程部分组成。 在一个系统中可能希望接入多个相同的从机, 从机地址中可编程部分决定了可接入总线该类 器件的最大数目。如一个从机的7位寻址位有 4位是固定位,3位是可编程位,这时仅能寻 址8个同样的器件,即可以有8个同样的器件 接入到该I2C总线系统中。
(2)数据帧格式 I2C总线上传送的数据信号是广义的,既包括地址 信号,又包括真正的数据信号。 在起始信号后必须传送一个从机的地址(7位), 第8位是数据的传送方向位(R/),用“0”表示主机 发送数据(T),“1”表示主机接收数据(R)。每次 数据传送总是由主机产生的终止信号结束。但是, 若主机希望继续占用总线进行新的数据传送,则可 以不产生终止信号,马上再次发出起始信号对另一 从机进行寻址。 在总线的一次数据传送过程中,可以有以下几种 组合方式:
一、扩展电路
二、串行E2PROM的扩展
(1)串行E2PROM典型产品 ATMEL公司的AT24C系列:
AT24C01:128字节(128×8位); AT24C02:256字节(256×8位); AT24C04:512字节(512×8位) AT24C08:1K字节(1K×8位); AT24C16:2K字节(2K×8位);
基于CAN总线的智能交通控制系统设计

基于CAN总线的智能交通控制系统设计夏长权;佟国栋;朱金荣;韩东利【摘要】为了进一步提高十字路口的车辆通行效率,提出基于CAN总线的智能交通控制系统设计方案.该系统包括硬件控制模块、车流量采集模块、上位机软件等部分.其中硬件控制模块由主控模块、驱动模块、硬件黄闪模块等组成.主控模块负责协调调度各个模块之间的工作;驱动模块负责驱动路口的信号灯及故障检测;车流量采集模块负责采集排队车流量数据,为智能配时提供数据支持.主控模块与驱动模块之间采用CAN总线通信,通信速率高、可靠性好.调试结果表明,该控制系统能够根据车流量智能调节车辆通行时间,提高车辆通行效率.【期刊名称】《现代电子技术》【年(卷),期】2018(041)015【总页数】4页(P137-140)【关键词】智能交通;CAN总线;车流量采集;信息通信;远程控制;通行效率【作者】夏长权;佟国栋;朱金荣;韩东利【作者单位】扬州大学物理科学与技术学院,江苏扬州 225002;扬州大学物理科学与技术学院,江苏扬州 225002;扬州大学物理科学与技术学院,江苏扬州225002;扬州大学物理科学与技术学院,江苏扬州 225002【正文语种】中文【中图分类】TN876-34;TP290 引言近年来,随着机动车辆日益增长,越来越多的城市出现了交通拥堵的现像[1]。
为了解决交通拥堵的问题,一方面可以改良城市道路基础设施,另一方面则可以提高交通灯控制系统对车流量的调度效率。
经过调研发现,大部分城市使用的交通信号控制器采用固定时间的调度策略[2]。
这种调度策略对于车流量均衡的路口调度效率良好,但对于车流量变化较大的路口调度效率比较低。
为了提高对车流量变化较大路口的调度效率,本文提出基于CAN总线的智能交通控制系统解决方案。
该方案通过地磁检测器采集路口车流量信息作为交通灯控制器配时方案的参考数据,控制器根据车流量智能分配通行时间,经过验证可以有效提高车辆通行效率。
双向可控mos管典型电路设计

双向可控mos管典型电路设计一、引言在电子学领域,双向可控MOS管是一种重要的元件,常用于实现电路的双向控制和功率调节。
本文将介绍双向可控MOS管的基本原理,并以此为基础设计一个典型的电路。
二、双向可控MOS管基本原理双向可控MOS管,也称为三极可控晶体管(Triac),使用PNP和NPN晶体管结合的结构,具有两个控制极(G1和G2)。
其工作原理可以简述如下:1. 当G1极获得一个正脉冲,高电平时,晶体管的G1-G2之间产生一个正向电流,使得MOS管导通。
2. 当G1极获得一个负脉冲,低电平时,晶体管的G1-G2之间产生一个反向电流,使得MOS管导通。
3. 当G2极获得一个正脉冲,高电平时,晶体管的G2-G1之间产生一个正向电流,使得MOS管导通。
4. 当G2极获得一个负脉冲,低电平时,晶体管的G2-G1之间产生一个反向电流,使得MOS管导通。
三、双向可控MOS管典型电路设计以一个简单的恒流源电路为例,说明如何使用双向可控MOS管进行电路设计。
1. 电路图在本例中,我们需要设计一个恒流源电路,电路图如下:V1││ R1│──┬──┼───┬──│ │ ││ ┌┴┐ M1├─┤ ├───│ │ │──┴┬┘V22. 基本原理在此电路中,我们利用双向可控MOS管(M1)控制恒流I的大小。
当V1为正脉冲时,M1导通,电流从V1流入R1,从而产生恒定的电流I。
当V1为负脉冲时,M1截止,电流无法通过R1。
同时,当V2为正脉冲时,M1导通,电流从V2流入M1的G2极,同样产生恒定的电流I。
当V2为负脉冲时,M1截止,电流无法通过M1的G2极。
3. 参数选择为了保证电路正常工作,我们需要合理选择电路中的参数。
其中,R1是恒流源的系列电阻,根据所需的恒流大小和电源电压,可以计算出造成I的大小的电压降。
同时,选择适当的双向可控MOS管,以保证其最大额定电流高于所需的恒流大小。
四、实验结果与分析通过实际搭建电路并进行测试,我们得到如下结果:1. 当V1为正脉冲时,电路正常工作,产生恒定的电流I;2. 当V1为负脉冲时,电路中无电流通过;3. 当V2为正脉冲时,电路正常工作,产生恒定的电流I;4. 当V2为负脉冲时,电路中无电流通过。
基于现场总线技术的优点优势及应用设计方案分析
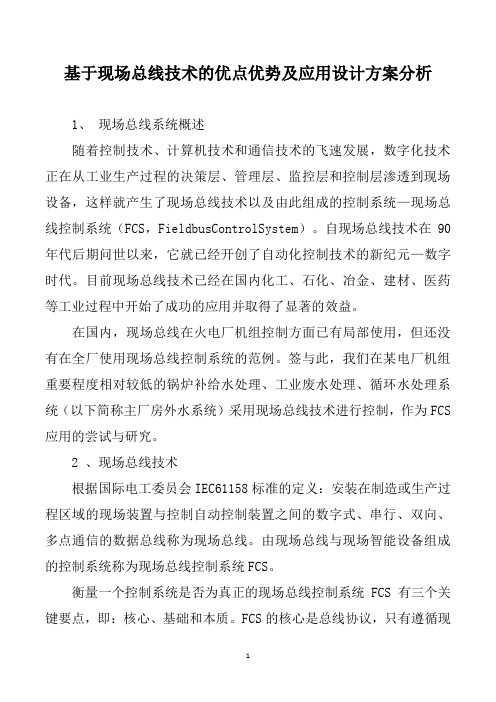
基于现场总线技术的优点优势及应用设计方案分析1、现场总线系统概述随着控制技术、计算机技术和通信技术的飞速发展,数字化技术正在从工业生产过程的决策层、管理层、监控层和控制层渗透到现场设备,这样就产生了现场总线技术以及由此组成的控制系统—现场总线控制系统(FCS,FieldbusControlSystem)。
自现场总线技术在90年代后期问世以来,它就已经开创了自动化控制技术的新纪元—数字时代。
目前现场总线技术已经在国内化工、石化、冶金、建材、医药等工业过程中开始了成功的应用并取得了显著的效益。
在国内,现场总线在火电厂机组控制方面已有局部使用,但还没有在全厂使用现场总线控制系统的范例。
签与此,我们在某电厂机组重要程度相对较低的锅炉补给水处理、工业废水处理、循环水处理系统(以下简称主厂房外水系统)采用现场总线技术进行控制,作为FCS 应用的尝试与研究。
2 、现场总线技术根据国际电工委员会IEC61158标准的定义:安装在制造或生产过程区域的现场装置与控制自动控制装置之间的数字式、串行、双向、多点通信的数据总线称为现场总线。
由现场总线与现场智能设备组成的控制系统称为现场总线控制系统FCS。
衡量一个控制系统是否为真正的现场总线控制系统FCS有三个关键要点,即:核心、基础和本质。
FCS的核心是总线协议,只有遵循现场总线协议的控制系统,才能称为现场总线控制系统;FCS的基础是数字智能现场仪表,它是FCS的硬件支撑;FCS的本质是信息处理现场化,这是FCS的系统效能体现。
现场总线控制系统是一种全计算机、全数字、双向通信的新型控制系统。
现场设备级的数字化、网络化是电厂信息化管理的基础。
现场总线技术开发的出发点就是要为用户提供开放的、具有可互操作性、可互换性和统一标准的测量和控制产品,以现场总线技术为基础的FCS的优越性概括起来有以下几方面:互操作性、分散性、可靠性、精确性、开放性、经济性、可维护性。
1999年底IECTC65(负责工业测量和控制的第65标准化委员会)通过了8种类型的现场总线作为IEC61158国际标准。
基于DSP的CAN总线控制系统的设计

计算机技术 化工自动化及仪表,2006,33(6):50~52 Contr ol and I nstru ments in Che m ical I ndustry 基于D SP的CAN总线控制系统的设计陈晓侠,陆 坦,王立明(大连交通大学,辽宁大连116028) 摘要: 以SHCAN2000控制系统现场智能测控组件的升级为背景,介绍以DSP为现场智能测控单元微处理器的新型智能测控组件对系统控制功能及通信功能的改善。
详细介绍T MS2812信号处理器的eC AN模块以及其与C AN总线之间的通信,并给出其通信部分硬件和软件的设计方法,采用OPC服务器为上、下位机的I/O驱动程序,满足了现场智能仪表的计算复杂性和系统通信的时实性。
关键词: DSP;eCAN;OPC服务器 中图分类号:TP3 文献标识码:B 文章编号:100023932(2006)06200502031 引 言本文是在原有的基于CAN总线技术的SHCAN2000型现场总线控制系统的基础上进行通信功能和现场智能单元控制功能的升级。
SHCAN2000上位机监控软件采用的是I ntellution公司的F I X I/O驱动程序开发工具开发的专用驱动程序,只适合于F I X监控组态软件和单一厂家开发的下位机控制芯片,如果更换下位机就必须为上位机F I X监控软件重新开发I/O驱动,如更换监控组态软件就必须为其重新开发针对监控软件和下位机芯片的I/O驱动,大大限制了系统的集成性和通用性,给开发人员增加了极大的困难。
SHCAN2000系列智能仪表硬件采用MCS251系列单片机,外围电路大,功耗多。
为此,本课题组开发了基于T MS2812DSP处理器为核心的新型智能测控组件,并采用了OPC服务器实现I/O驱动,弥补了SHCAN2000系统中的缺陷。
2 改进后系统(MMB)的体系结构MMB现场总线控制系统采用三层体系结构,即操作站—CAN总线网络—现场控制单元。
双向总线结构名词解释

双向总线结构名词解释
双向总线结构是计算机系统中一种常见的数据传输架构。
它由两个并行的传输
通道组成,其中一个通道用于数据的发送,另一个通道用于数据的接收。
这种结构能够同时支持数据的双向传输,提高了数据传输的效率和灵活性。
双向总线结构有广泛的应用,在计算机系统内部以及与外部设备的通信中起着
重要的作用。
例如,在CPU和内存之间,使用双向总线结构可以实现数据的读取
和写入。
CPU可以通过发送地址和控制信号,将数据写入内存或从内存读取数据。
双向总线结构还常用于外部设备的连接。
通过将设备与计算机系统的总线相连接,可以实现设备与系统之间的数据交换。
外部设备可以向计算机系统发送数据,也可以从计算机系统接收数据,实现双向的数据传输。
例如,将打印机连接到计算机系统的双向总线上,可以实现计算机向打印机发送打印任务,并接收打印机返回的状态信息。
双向总线结构的一个关键特点是能够支持多个设备的连接。
计算机系统中的多
个设备可以共享同一个总线,通过总线进行数据的传输。
这种结构极大地简化了计算机系统的设计和管理,提高了系统的可扩展性和灵活性。
总之,双向总线结构是一种常见的数据传输架构,用于实现计算机系统内部以
及与外部设备之间的双向数据传输。
它提高了数据传输的效率和灵活性,可以应用于不同的计算机系统和外部设备连接。
最简单的I2C双向通信总线隔离方案
I2C总线是一种由PHILIPS公司在八十年代设计开发的两线式串行总线,主要用于连接整体电路,如微控制器及其外围设备,电路中各模块的连接等。
该总线使用信号线少,并具有自动寻址、多主机时钟同步和仲裁等功能,因而在各类实际应用中得到广泛的应用。
多用于电源控制器,ADC,DAC,EEPROM 以及其他器件的通信传输。
在很多传感器设备,数据采集和电源控制系统中,必须把 I2C 主设备与一个或多个从设备隔离开来,以解决噪声干扰、接地环路电流和系统安全等问题。
本设计采用ADI公司基于磁隔离技术的双向数字隔离器ADuM1250,以实现电路最简单,成本最节省,设计时间最短的高效I2C双向通信总线隔离方案。
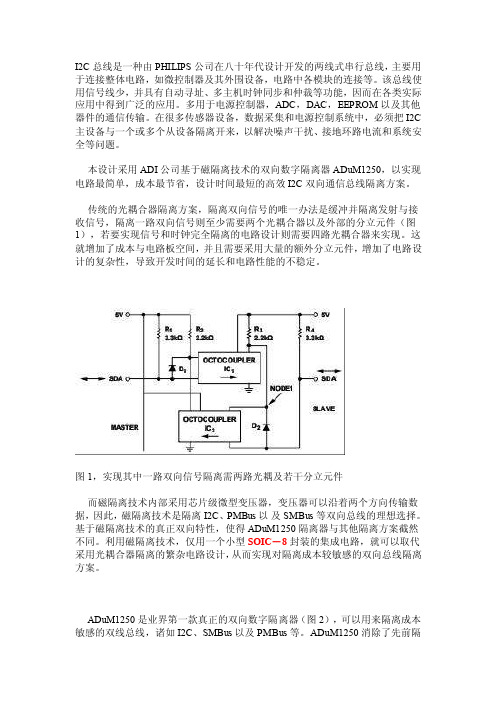
传统的光耦合器隔离方案,隔离双向信号的唯一办法是缓冲并隔离发射与接收信号,隔离一路双向信号则至少需要两个光耦合器以及外部的分立元件(图1),若要实现信号和时钟完全隔离的电路设计则需要四路光耦合器来实现。
这就增加了成本与电路板空间,并且需要采用大量的额外分立元件,增加了电路设计的复杂性,导致开发时间的延长和电路性能的不稳定。
图1,实现其中一路双向信号隔离需两路光耦及若干分立元件而磁隔离技术内部采用芯片级微型变压器,变压器可以沿着两个方向传输数据,因此,磁隔离技术是隔离I2C、PMBus以及SMBus等双向总线的理想选择。
基于磁隔离技术的真正双向特性,使得ADuM1250隔离器与其他隔离方案截然不同。
利用磁隔离技术,仅用一个小型SOIC-8封装的集成电路,就可以取代采用光耦合器隔离的繁杂电路设计,从而实现对隔离成本较敏感的双向总线隔离方案。
ADuM1250是业界第一款真正的双向数字隔离器(图2),可以用来隔离成本敏感的双线总线,诸如 I2C、SMBus以及PMBus等。
ADuM1250消除了先前隔离I2C接口需要的光耦合器与支持电路,使电路板空间减少80%,实现了隔离I 2C的最低成本方案。
ADuM1250工作温度105℃,具有热插拔功能,支持的最高数据速率是1 Mbps,提供2.5KVrms/min的隔离电压。
基于CAN总线的数据采集与控制系统设计

基于CAN总线的数据采集与控制系统设计郝寿朋;刘瑞玲【摘要】In order to ensure real-time and reliable data transmission, solve the problem that the data is prone to be interfered in the process of data transmission, and ensure the capability of the data acquisition and control system, CAN (controller area network) bus is taken as the fieldbus in the system to realize data transmission. CAN is a kind of serial communication network that supports the distributed control and the real time control, and has the characteristics of high performance and high reliability. The repeated tests for the hardware and software of the system demonstrates the capability of the system, and embodies the obvious advantage of CAN bus in the aspects of the communication capability, reliability, real time, and so on.%为了保证数据传输的实时性、可靠性,解决数据传输过程中易受干扰的问题,并保证数据采集和控制系统的性能.采用CAN总线作为现场总线来实现数据传输.经过对系统软硬件在不同环境下的多次测试,验证了该系统的性能,同时也体现了CAN总线在通信能力、可靠性和实时性等方面的明显优势.【期刊名称】《现代电子技术》【年(卷),期】2011(034)008【总页数】4页(P36-38,42)【关键词】CAN总线;数据采集;控制系统;串行通信【作者】郝寿朋;刘瑞玲【作者单位】中国海洋大学,信息科学与工程学院,山东,青岛,266100;临沂市高级技工学校,山东,临沂,276021【正文语种】中文【中图分类】TN911-340 引言随着计算机网络上的高速发展,使得信息的交流与共享变得空前广泛和自如,而这项技术也渗入到自动化领域的变革当中,现场总线(Fieldbus)由此应运而生,开创了工业控制的新篇章。
基于VHDL_CPLD的I2C串行总线控制器设计及实现.

集谴电路瞳舶基于VHDL/CPLD的12C串行总线控制器设计及实现钱敏,黄秋萍,李富华,刘蓓(苏州大学电子信息学院微电子系,江苏苏州215021)摘要:分析了12C串行总线的数据传输机制,用VHDL设计了串行总线控制电路,其中包括微处理器接口电路和12C总线接口电路。
采用ModelSimPlus6.0SE软件进行了前仿真和调试,并在XilinxISE7.1i开发环境下进行了综合、后仿真和CPLD器件下载测试。
结果表明实现了12C串行总线协议的要求。
关键词:12C串行总线控制器接口电路VHDLCPLD串行总线和并行总线相比具有结构简单、占用引脚其传输过程为:首先主机产生起始位,然后传送第一个少、成本低的优点。
常见的串行总线有USB、1EEEl394、字节。
8位数据中首先传送的是数据的最高位MSB,最12C等,其中12C总线具有使用简单的特点,在单片机、串低位LSB为读写指示位,1表示主机读,0表示主机写,行E2PROM、LCD等器件中具有广泛的应用。
高7位地址可使主机寻址128个从器件。
12C(InterICBUS)是Philips公司开发的用于芯片之从机收到第一字节数据后发响应位,主机收到响应间连接的总线。
12C总线用两根信号线进行数据传输,位后接着发送第二个字节的数据。
数据发送完毕后产生一根为串行数据线(SDA),另一根为串行时钟线(SCL)。
结束位,数据传送结束。
数据传送时,只有时钟SCL为低12C总线允许若干兼容器件(如存储器、A/D转换器、D/A电平时SDA才允许切换,SCL为高电平时SDA必须稳转换器、LCD驱动器等)共享总线。
12C总线理论上可以定,此时SDA的电平就是总线转送的数值。
允许的最大设备数,是以总线上所有器件的总电容(其在SCL为高电平时,SDA线由高到低切换表示起始中包括连线本身的电容和连接端的引出电容)不超过位,SDA线由低到高切换表示停止位。
起始位和停止位400pF为限,总线上所有器件依靠SDA线发送的地址信由主机产生,在起始位产生后总线处于忙状态,停止位号寻址,不需要片选线。