计算接触力学chapter10
接触力学报告

摘要:通过接触力学基本知识的分类,理解和掌握;总结了关于Hertz接触理论处理两个球体的接触,球体及刚性圆柱体和弹性半空间的接触等一系列经典问题的方法;并对Hertz接触-有限元分析方法进行了简单的介绍以及讨论了Hertz理论的局限性。
最后对撞击问题进行了较为系统的分类,并给出撞击问题的实例,从简单到复杂,即从弹性,弹塑性,粘弹性做了,做了一个简单的模型,并给出了主要分析步骤和计算方法。
关键词:接触力学,Hertz理论,撞击1.基本概念的介绍 (3)1.1. 按接触物体的材料性质分类 (3)1.2. 按空间分类 (3)1.3. 按接触面的光洁度分类 (3)1.4. 按理论力学的方法分类 (4)1.5. 按接触物体的几何形状分类 (4)2. 接触力学分析方法 (4)2.1. 经典的接触力学接触问题 (4)2.2. 非经典的接触力学分析方法 (5)3.Hertz接触理论 (5)3.1. Hertz接触的一般假定: (5)3.2. 经典弹性接触问题 (5)3.3. Hertz接触-有限元分析 (10)4.撞击 (11)4.1. 碰撞 (11)4.2. 碰撞的分类 (11)4.3. 实例分析(接触力-变形模型) (12)5.收获与体会 (14)6.参考文献 (14)1.基本概念的介绍1.1. 按接触物体的材料性质分类1.1.1 弹性物体的接触这是最广泛的一类接触问题,是弹性理论的一大类专门性问题,已研究得相当成熟研究对象是弹性物体与弹性物体相接触,刚性物体与弹性物体相接触。
1.1.2 粘弹性物体的接触多研究线性粘弹性物体的接触应力和应变是线性关系但这种关系和时间、速率相关,所以是粘弹性物体它包括弹性物体和粘弹性物体的接触,刚性物体和粘弹性物体的接触。
1.1.3 塑性物体的接触主要研究材料屈服后的接触,当然是非线性的应变同应力的本构关系比较复杂包括刚性物体同塑性物体的接触、弹塑性同时存在、纯塑性等问题。
1.1.4可变形固体同液体的接触这类问题往往以流体力学为主,液体载荷影响可变形物体的应力分布有关线性弹性接触的文献最丰富,解决的问题也最多尽管如此,这类问题与弹性理论的其他专门可题有共同特性,对于它们的研究还在继续发展。
计算固体力学10_接触-碰撞

B 这个条件要求 t N 为正数,物体B上的面力在A的单位法线上的投影,
它指向物体B。对应于物体A和B,注意到上面的表达式是不对称的。 为了定义法向面力,选择其中一个物体的法向,并且物体法向面 力的符号将取决于选择的这个法向。
2
接触界面方程
面力条件
定义切向面力为
A A A tT t A tN n , B B A tB T t tNn
2
接触界面方程
不可侵彻性条件 运动学
由于以位移的形式表示交集为零的公式是不可能的,所 以,在接触过程的每一阶段中以率形式或者增量形式表示不 可侵彻性方程是很方便的。其率形式应用到物体 A和 B上发生 接触的部分,即是位于接触表面上的那些点
A B N v A n A v B n B (v A v B ) n A vN vN 0
在Γc 上
两个物体的相互侵彻速率
A vN vA nA,
B vN vB nA
利用
A A A A A A A ˆ vN ˆ v A=vN n v e n vT
A B B ˆ ˆ e v v n v vN n vB T B B N A B
A 点乘 n
得到上两式
不Байду номын сангаас侵彻性条件
一对物体的不可侵彻性条件可以表示为交集为零
A B 0
两个物体不允许重叠,这可以视为一个协调条件。对于大位 移问题,不可侵彻性条件是高度非线性的,并且一般不能以位移 的形式表示为一个代数方程或者微分方程。其困难源于在一个任 意运动中,不可能预先估计到两个物体的哪些点将发生接触。 例如,如果物体在旋转中,对于 P 点接触Q 点是可能的,而一个 不同的相对运动可能导致 P 点与 S 点接触。结论是,除了以一般 的形式,找不到其它的方程表示 P 点没有侵入物体A 的事实。
第十一章 接触
第十一章接触许多工程问题涉及两个或多个部件间的接触。
在这类问题中,当两个物体彼此接触时,物体间存在沿接触面法向的相互作用力。
如果接触面间存在摩擦,沿接触面的切线方向也会产剪力以抵抗物体间切向运动(滑动)。
接触模拟通常的目标是确定接触面积及计算所产生的接触压力。
在有限元中,接触条件是一类特殊的不连续的约束,它允许力从模型的一部分传递到另一部分。
因为只有当两个表面接触时才用到接触条件,所以这种约束是不连续的。
当两个接触的面分开时,就不再存在约束作用了。
因此,分析方法必须能够判断什么时候两个表面是接触的并且采用相应的接触约束。
同样,分析方法也必须能判断什么时候两个表面分开并解除接触约束。
在ABAQUS接触分析过程中,必须在模型的各个部件上创建可能接触的面。
一对彼此可能接触的面,称为接触对,必须被标识。
最后各接触面服从的本构模型必须定义。
这些接触面间的相互作用的定义包括诸如摩擦等行为。
11.1 接触面间的相互作用接触面之间的相互作用包含两个部分:一部分是接触面的法向作用,另一部分是接触面的切向作用。
切向部分包括接触面间的相对运动(滑动)和可能的摩擦剪应力。
11.1.1 接触面法向性质两个面之间分开的距离称为间隙。
当两个面之间的间隙变为零,接触约束就起作用了。
在接触问题的公式中,对接触面之间相互传递接触压力的大小未作任何限制。
当接触压力变为零或负值时,接触面分离,约束就被撤出。
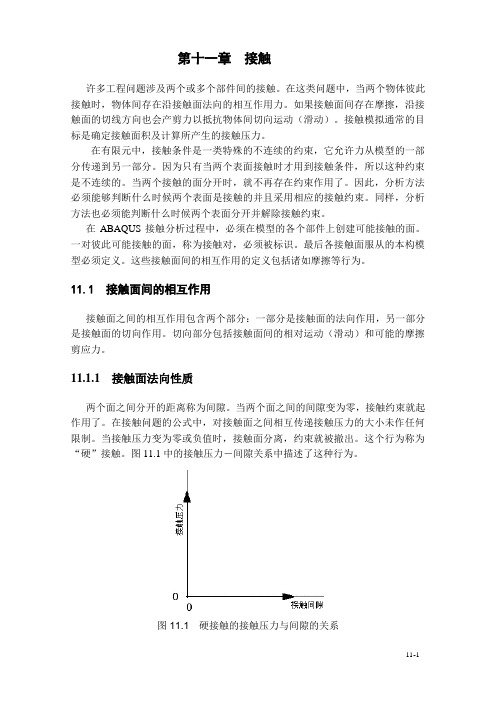
这个行为称为“硬”接触。
图11.1中的接触压力-间隙关系中描述了这种行为。
图11.1 硬接触的接触压力与间隙的关系当接触条件从“开”(正的间隙)到“闭”(间隙为零)时,接触压力发生剧烈的变化,有时使得接触计算很难完成。
在后面的章节中将讨论克服接触计算困难的若干技术。
另外一些信息可参见ABAQUS/Standard 用户手册22.1.1节。
和ABAQUS/Standard讲义的接触部分。
11.1.2 表面的滑动除了要确定在某一点是否发生接触外,分析中还必须计算两个表面间的相互滑动关系。
接触力学与摩擦学的原理及其应用

接触力学与摩擦学的原理及其应用接触力学和摩擦学是两个重要的力学分支,它们涉及到物体间接触面的状态、运动、力学特性及其应用。
接触力学和摩擦学的应用非常广泛,机械工程、材料工程、航空航天工程等领域都需要这方面的知识。
本文将主要介绍接触力学和摩擦学的原理及其应用。
接触力学可以用来描述实物之间的接触状态、接触区域形状、接触压力分布和接触变形等问题。
在接触力学中,最基本的概念是Hertz接触理论。
Hertz接触理论适用于弹性体间的接触,一般情况下是指半无限大的弹性体与小的弹性体之间的接触。
在Hertz接触理论中,假设接触面的形状为球形或者椭球形,两个接触面的形状相同。
接触的双方都是弹性体,并且能够在一定范围内发生线弹性变形。
根据Hertz理论,接触压力是接触处应力状态的结果。
在接触面内,正应力和剪应力在拟合点附近是最大的。
为了计算接触面的初始形状和压力分布,需要先确定正应力和剪应力分布。
1.轴承设计和制造轴承是机械旋转件中重要的传动元件,用于传输旋转力和负载。
轴承的设计和制造需要考虑接触力学、摩擦学、材料科学、热力学和工程制造等方面的知识。
接触力学理论可用于分析轴承的接触状态、接触面的形状和接触压力分布等问题。
这些信息对于轴承寿命、性能和可靠性等方面的研究是至关重要的。
2. 磨损机理和磨损预测材料金属在接触状态下发生摩擦和磨损,磨损过程对于材料性能的改变和材料寿命的影响是不可忽视的。
接触力学和摩擦学是磨损机理和磨损预测的关键因素。
接触力学可以用来描述材料之间的接触状态。
在摩擦学方面的知识,可以用来预测材料的摩擦和磨损行为。
通过研究材料的摩擦和磨损机理,可以得到材料的表面微观结构的信息,提高材料设计的可靠性和可行性。
3. 轮胎与道路的接触轮胎与道路的接触是汽车动力系统中最重要的问题之一,它直接影响汽车的稳定性、操纵性、制动距离和油耗等方面性能。
轮胎与道路的接触状态是一个复杂的多指标联合度量问题。
通过接触力学的原理,可以计算出轮胎和道路的接触压力分布,从而对轮胎与道路的接触状态进行预测和优化,提高汽车的性能与安全性。
接触刚度的计算范文
接触刚度的计算范文接触刚度(Contact stiffness)是指物体间接触时的刚度或硬度。
在工程应用中,接触刚度是一个重要的参数,影响着接触界面的力学行为和传递效率。
准确计算接触刚度对于设计和分析不同工程结构和材料的接触特性非常关键。
本文将介绍接触刚度的计算方法,并探讨一些常见的接触刚度计算模型。
一、接触刚度的定义接触刚度是指单位面积上的接触载荷和接触变形之间的关系。
它可以用来描述两个物体在接触时的弹性力学行为。
接触载荷可以通过施加外部力或重力来实现,接触变形可以通过测量接触区域的位移来得到。
接触刚度可以通过施加不同的载荷并测量相应的位移来计算或测量。
二、计算方法在实际问题中,接触刚度的计算方法可以分为两类:解析法和数值法。
解析法是指基于理论分析导出的数学公式,可以用于直接计算接触刚度。
数值法则是通过建立接触区域的有限元模型,然后使用数值方法进行求解。
1.解析法最简单直接的解析计算接触刚度的方法是利用胡克定律。
胡克定律认为应力与应变之间成线性关系。
对于弹性体,应变可以通过位移除以初始长度得到。
因此,接触刚度可以通过施加一定的载荷并测量相应的位移来计算。
K=F/δ其中,K为接触刚度,F为施加的载荷,δ为相应的位移。
这个公式适用于弹性接触和小变形情况。
对于非线性接触和大变形情况,可以使用其他更为精确的解析方法。
例如,Johnson等人提出了一个非线性接触刚度的计算公式:K=(4/3E*)*√(aδ)其中,E*为等效弹性模量,a为接触半径,δ为接触位移。
2.数值法数值方法通常更适用于复杂的接触形状和非线性接触问题。
最常用的数值方法是有限元分析。
有限元分析将接触区域划分为离散点或单元,并利用离散点或单元之间的关系来计算接触刚度。
数值方法的优点在于它可以考虑复杂的材料非线性行为和接触几何形状,但需要计算机较大的计算能力和复杂的建模过程。
三、接触刚度计算模型接触刚度计算模型是计算接触刚度的一个简化的数学模型。
接触力学与摩擦学的原理及其应用
接触力学与摩擦学的原理及其应用接触力学与摩擦学是力学中重要的研究领域,对于物体间接触和相对运动的分析具有重要意义。
它们的原理和应用涉及多个方面,如机械设计、工程力学、材料科学等。
下面将分别介绍接触力学和摩擦学的原理及其应用。
接触力学是研究物体间的接触问题,主要涉及接触中的力学特性、接触接触区域的形变和应力分布、接触面间的分离和粘附、接触润滑等。
其原理可以用下面的几个关键点来描述。
首先是Hertz弹性接触理论。
为了描述接触区域形变和应力分布,Hertz提出了弹性接触理论。
该理论假设接触区域是弹性变形,通过解析方法得到了接触区域的形状和应力分布等参数,为接触工程提供了基本的数学模型。
其次是接触力的分析。
接触力指的是物体间由于接触而作用于彼此的力。
接触力的分析可以通过考虑物体间的几何形状、接触区域的弹性特性和外界施加的作用力来进行。
常见的接触力是法向力和切向力,它们对物体的压缩、切削和滚动等运动起到重要作用。
再次是接触面间的摩擦。
摩擦是由于物体间相对运动而产生的力,其大小与接触面间的摩擦系数有关。
摩擦系数描述了物体表面间的粗糙度、材料特性和润滑等因素对摩擦力的影响。
对于有摩擦的接触问题,需要考虑摩擦力的大小和方向对物体的影响。
摩擦学是研究摩擦现象及其规律的学科。
它的应用涉及多个领域。
首先是机械设计领域。
在机械系统的设计中,需要考虑各个接触副之间的摩擦系数,以保证接触副的正常工作和运行效果。
例如,在轴承、齿轮和传动系统等机械部件的设计中,合理选择摩擦材料,并考虑摩擦力的大小和方向等因素,以保证机械系统的运行稳定性和寿命。
其次是工程力学领域。
在土木工程等领域中,需要考虑材料表面的摩擦力对于结构的影响。
例如,在桩基础设计中,需要考虑桩与土壤接触面的摩擦力,以保证结构的稳定性和承载能力。
此外,摩擦学还有很多其他应用。
在材料科学中,可以通过研究摩擦力的大小和变化规律来了解材料表面质量、硬度和润滑性能等特性。
在车辆工程中,摩擦力的研究可以用于改善汽车轮胎的抓地力和制动性能。
接触问题求解方法【刘怀举的博客】

接触问题求解方法(2010-10-02 00:25:00)转载▼标签:杂谈不管在接触边界之间是否有间隙存在,接触作用的出现对结构受载荷之后的接触状态和应力分布都有直接的影响,有些结构正是由于接触作用,使不连续的部分共同工作,从而提高了整个结构的承载力和刚度;而正是由于接触的存在使得有些结构出现局部高应力,很容易使材料屈服或发生裂缝,如果再受到循环荷载的影响,还可能产生疲劳失效。
因此对于接触问题的研究具有重要的工程实际意义。
赫兹接触理论及后来其它学者发展的弹性接触理论称为经典接触力学,它们都是通过封闭的解析解来解决接触问题的,但其应用范围有限,因而接触力学的进展主要与消除这些限制有关。
接触问题属于数学上的混合边值问题,Boussinesq积分方程是其主导方程。
按所用数学方法的不同,可将接触问题的理论解法大致分为经典解法和非经典解法。
以经典的数学工具如积分变换法和复变函数法求解接触问题的方法称为经典解法,以有限元法、边界元法等求解接触问题的方法称为非经典法。
以传统有限元法等数值方法为基础的非经典解法主要有罚函数法、拉格朗日乘子法、增广拉格朗日乘子法、摄动拉格朗日乘子法及数学规划法。
Trefftz有限元模型利用辅助网线位移场或面力场,在一种杂交意义上将单元域内位移场关联起来。
单元域内位移场精确满足控制微分方程,它可表达为微分方程的特解、适当截断的Trefftz完备解系与待定参数乘积的和的形式。
利用定义在每个单元边界上的独立的网线位移场,单元间的连续性就在一种近似意义上得到满足。
在单元一级上消去内部待定参数后即可得到标准的力-位移关系式(即单元刚度方程)。
变分泛函是Trefftz有限元法的核心,它在单元公式推导中起着至关重要的作用。
由于Trefftz有限元法继承了传统有限元法和传统边界元法的优点:(1)公式中只含有对单元的边界积分,这样就可以生成任意多边形单元甚至曲边单元。
因此,Trefftz有限元法可被认为是一种特殊形式的边界型求解方法,单元的边界类似于一种特殊形式的边界单元,其刚度矩阵对称、计算简单,而不像传统边界元那样要进行复杂的计算(如计算边界奇异积分的复杂积分规则,处理非齐次方程的特殊积分,处理间断问题的双节点技术等等)。
00207723接触力学教学大纲

《接触力学》教学大纲课程名称:接触力学英文名称: Contact Mechanics课程编号:00207723课程学时: 32课程学分:2课程性质:学位课开课单位: 机械学教研室适用专业:机械设计及理论、工程力学、机械制造及自动化预修课程:理论力学、材料力学、弹性力学、塑性力学大纲执笔人:魏延刚一、课程目的与要求本课程的目的主要是让学生在硕士学习期间在掌握经典弹性理论中的应力状态分析、应变状态分析的基本概念,弹性力学中的应力应变关系的基本定律和基本方程,屈服条件和塑性应力应变关系基础上,掌握接触应力的基本概念,如:赫芝接触、非赫芝接触等,了解接触应力所产生的应力效应,如:接触应力的边界效应等;了解工程实际中的几种典型接触问题,如:圆柱体之间的外接触、圆柱体之间的内接触和球体之间的接触等;了解工程实际中典型零件的接触问题,如:齿轮传动的接触问题,滚动轴承的接触问题,轴毂配合的接触问题;了解经典力学解和有限元素法求解接触问题的特点,另外,通过英文原著学习掌握一定相关的英文学术词汇,提高专业英文阅读能力。
本课程要求学生在掌握和了解上述理论和知识的基础上,在实践中能利用有限元分析软件进行工程中有关接触问题的分析和研究工作,掌握一定相关的英文学术词汇。
二、教学内容及学时安排第一章力学基础 6 学时一、接触力学的发展及工程中的接触问题二、应力分析三、应变分析四、弹性力学中的广义虎克定律和基本方程五、屈服条件和塑性应力应变关系第二章接触力学基础 20 学时一、接触问题二、弹性力学半无限楔形体与半无限平面问题三、两个平行轴圆柱的接触问题四、空间轴对称问题五、半空间体几种典型载荷作用下的情况六、圆接触面的接触问题七、一般情况下的弹性接触问题第三章机械工程中的接触问题及其有限元分析 6学时一、滚子轴承中的接触二、过盈配合中的接触三、齿轮传动中的接触四、接触问题的有限元分析三、教材及主要参考书1、徐秉业,黄炎,刘信声等编,弹塑性力学及应用,机械工业出版社,19892、(英)K.L.Johnson著,《Contact mechanics》,Cambridge University Press,First published 19853、(加)格拉德韦尔(Gladwell,G.M.L.)著, 《经典弹性理论中的接触问题》, 北京理工大学版社,1991年12月4、吴家龙编著,《弹性力学》同济大学出版社,1987年8月。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
10Solution AlgorithmsIn this chapter we consider algorithms which are essential for the treatment of contact problems.These are applied to the discretized problem,which are derived using the formulations in Chapters6,7and8.The algorithms for detecting contact are of utmost importance,since in complex engineering applications like a car crash or fragmentation of brittle materials,contact occurs at non-predictable places on the surfaces of the bodies involved.In such situations,contact search has to be performed in every time or load step of the numerical simulation.Additionally,when fractured materials are considered,many new contact surfaces are generated due to the splitting of elements into pieces once fracture occurs.All together,these simulations require complex software which has to be designed to be most efficient.This is necessary since the number of operations needed to check O(N)surfaces of a discretized domain is O(N2).If such a check has to be carried out at each iteration step,then the search will dominate the overall time for the computation.Hence algorithms have to be developed which reduce the frequency of the search and its complexity.In general,we have to distinguish between global and local algorithms:•global algorithms1.contact search2.solution of the variational inequalities•local algorithms1.contact detection2.update of constitutive equations and stresses.The global algorithms are related to purely geometrical considerations when the contact search has to be done.There are many different approaches for contact detection which will be discussed in Section10.1.In Sections10.2and10.3solution methods for non-constraint and con-straint problems are discussed.Here,several aspects related to the design of solution methods have to be considered.These are associated with31010Solution Algorithms•the existence of solutions in the domain of interest,and•the number of solutions in that domain.The theoretical analysis can be found in the mathematical literature.For gen-eral results regarding unconstraint problems,see Vainberg(1964)or Ortega and Rheinboldt(1970).Associated results for contact problems are reported in Hlavacek et al.(1988),Kikuchi and Oden(1988)or Curnier et al.(1992).The approximation of the solution has to be computed by using adequate algorithms.A direct solution of the equation system resulting from thefinite element discretization G(u)=0under the inequality constraints C(u)≥0 due to contact is not possible,due to the nonlinearity of the problem.Hence, iterative algorithms are needed which can be distinguished in the following manner:•methods based on linearizations,•minimization methods,or•reduction methods which yield simpler nonlinear equations.Before one chooses an algorithm,one has to check the following questions in order to obtain a fast,efficient and robust scheme:•Does the algorithm converge to the solution?•How fast is convergence?Does the rate of convergence depend upon the problem size?•How efficient is the algorithm?–number of operations within an iteration,–total number of iterations,and–memory used.Thefirst question is related to the global convergence properties of the algo-rithm.It is essential for the user of such a scheme,since he needs a robust and reliable tool for the solution of his problem.In contact mechanics this is a not completely solved problem,especially when implicit methods are ap-plied to friction problems.However,the other questions raised are essential, in the sense that most of the engineering problems are represented by a three-dimensional discretization which leads to very large number of unknowns.In this respect,the memory used is relevant to keep the process in the CPU,and hence avoid time consuming access to the hard disk.Furthermore,one should apply solution methods which only need O(N)operations in order to keep the solution times to a minimum.All these aspects define a vivid researchfield in which new fast algorithms are constructed based on different mathematical approaches and computer architectures.One cannot,therefore,conclude that an optimal solution procedure exists at the moment for contact problems.The bandwidth of global algorithms for the solution of variational inequal-ities is very broad.We should like to mention the simplex method,mathemati-cal programming,active set strategies using Lagrange multipliers,sequential quadratic programming,penalty and augmented Lagrange techniques,as10.1Contact Search311 well as barrier methods.The basis for these different methods with regard to continuum mechanics has been given in Chapter6.All these techniques have advantages and disadvantages concerning efficiency,accuracy or robustness, and thus have to be applied according to the problem at hand.In Section10.2 we discuss methods to solve unconstraint problems or problems with equality constraints which are applied within the global algorithms for the solution of variational inequalities.Thereafter,in Section10.3,we sketch some of the global algorithms which are mainly applied to contact problems.Local algorithms have to be employed once the global contact search has found possible contact partners.A more accurate local search has to be car-ried out in order tofind the correct faces and elements in contact,and in the case of contact,the correct projection of nodes onto the surface of the contacting partner has to be determined.The latter algorithms have already been described in Chapter8.The local contact search will be discussed in Section10.1.2.The update algorithms for the contact stresses,especially the tangential stresses due to friction,have been settled.In this case,the so-called projection methods or return mapping schemes yield the most efficient and robust treatment.Due to the fact that an algorithmic tangent operator can be constructed,this technique can be incorporated into a Newton–Raphson scheme;see Section10.5for further details.Furthermore,algorithms also have to be devised for coupled problems, which may be necessary in the case of thermo-mechanical coupling or for fluid-structure interaction problems.Algorithms for coupled problems,like staggered schemes,depend upon the type of coupling,and thus have to be designed with special care regarding robustness and efficiency.Algorithms for thermo-mechanical contact problems can be found in Section11.5.10.1Contact SearchOne of the biggest problems in computational contact mechanics is the search for contact between solids.This is especially true when the problem is such that the solids can break,and hence during the solution process several thou-sands of discrete elements will originate from the initial set up.Examples for these types of dynamic and impact problems can be found in Munjiza and Owen(1993),Munjiza et al.(1995),Camacho and Ortiz(1996)or Kane et al. (1999).In such cases,as also in discrete element or rigid body simulations, most of the computing time has to be devoted to the search,since these com-putations are usually based on explicit techniques.Thus,fast algorithms for the detection of contact are needed.The most recent methods are presented in the overview paper by Williams and O’Connor(1999),see also the references therein.Static contact problems with large deformations also need fast and reli-able search algorithms,since contact areas are not known a priori and can change within a load step considerably.Furthermore,self-contact has to be31210Solution Algorithmsincluded,too.The search for an active set of contact constraints is not triv-ial in this case,since a surface point of a body may contact any portion of the surface of another body.Such a point can even come into contact with a part of the surface of its own body.Thus the search for the correct contact location eventually needs considerable effort,depending on the problem.An implementation where each node of a surface is checked against each element surface in the mesh is too exhaustive and computationally inefficient,thus refined algorithms have to be constructed.This is especially true when the contact of more then two bodies has to be considered,or when self-contact is possible.A relatively simple situation is depicted in Figure10.1(a),where four differentfinite element discretizations might come into contact.One can immediately observe that it does not make sense to check the contact of one node against each node on the surface of the other discretizations.This effect is even more pronounced in the set of spheres shown in Figure10.1(b).Here the possible contact partners of the black sphere have to be found.It is clear that only the spheres in the vicinity of the black sphere should be checked. One thus has to search for the neighbouring objectsfirst,and then perform the local search for real contact.Thus,in general,contact search has to be split into two phases:(I)the spatial search for objects/finite elements which might possibly comeinto contact;and(II)the determination of pairs of objects/finite elements which actually inter-sect and hence are in contact(contact detection).In phase(I)one orders thefinite elements lying on the surface of the solid by a sorting algorithm.As discussed in Williams and O’Connor(1995)it is sufficient in this phase to represent the objects by a coarse description,e.g. bounding boxes or surrounding spheres,see Figure10.2.The main point when using such simple descriptions is that one can use these to design fast and inexpensive(computationally efficient)sort and search routines.Within theFig.10.1.(a)Discrete contact FEM,(b)Discrete contact spheres.10.1Contact Search313Fig.10.2.Bounding box and surrounding sphere of an object.global search a hierarchical structure can be set up tofind out which bodies, part of the bodies,surfaces or parts of the surfaces are able to come into contact within a given time step or displacement increment,e.g.see Zhong and Nilsson(1989),Zhong(1993)or Williams and O’Connor(1995).One of thefirst implementations,applied within thefinite element method tofind solutions to large deformation contact problems,see Benson and Hal-lquist(1990),was called the bucket search.The space is subdivided into cells or buckets,as shown in Figure10.3.Only the grey bucket is searched,which leads with careful coding to a scheme with O(N)operations.Up to now,several different methods have been developed,and applied to determine the possible contact partners.Recently,a considerable impact has come from discretefinite element methods where several thousand particles have to be included in the contact search.Methods like space cell decompo-sition have been considered by Belytschko and Neal(1991);a combination with the binary tree search can be found in Munjiza et al.(1995);whereas Williams and O’Connor(1995)rely on heapsort algorithms for the global search.More advanced algorithms are the NBS algorithm,see Munjiza and Andrews(1998),the alternating digital tree method from Bonnet and Peraire (1991),a spacefilling curve technique,see Diekmann et al.(2000),or the Double-Ended Spatial Sorting(DESS)algorithm constructed in Perkins and Williams(1995).Fig.10.3.Bucket search for contact.31410Solution AlgorithmsIn phase(II)the intersection of the objects is checked,and when inter-section occurs the actual contact point,the associated penetration and the local slip are determined using equations(4.3),(4.7)and(4.19).In the special case of contact between a deformable and a rigid body,the rigid body can be described by implicit functions such as superquadrics,see Williams and Pentland(1992).This leads to a simple and efficient contact check for points lying on the surface of the deformable body.For the special case of cylinders or ellipses,see also Hallquist et al.(1992).However,the evaluation of func-tions describing the superquadrics involves the computation of trigonometric or exponential functions,and is thus expensive.Other representations have therefore been constructed which are based on discrete functions,see Williams and O’Connor(1999).Other methods are the node-to-segment algorithm,see Hallquist(1979),or the pinball technique by Belytschko and Neal(1991).Now we discuss some techniques which can be applied for the spatial search in phase(I)and the contact detection in phase(II).10.1.1Spatial search,phase(I)In the spatial search we have to distinguish between problems in which the evaluation of the deformation is slow or predictable,and cases where arbi-trary deformations occur.In thefirst problem class,we distinguish forfinite elements the cases of small deformations and large deformations:•The problem involves only small deformations.Hence,the position of the solids does not change much,and we can use a linear description for the contact kinematics and assume that the topology of the system isfixed, see Figure8.1.Therefore,all possible connections and neighbouring pairs are known,and only contact detection is necessary,which itself can be evaluated in an efficient way.•Large deformation occurs with a smooth movement of a contact point over adjacent elements of the contacting body.In that case(see Figure10.4) we have to use spatial search to locate the neighbouring segment to a slave node s which has changed during the iteration from segment I to K.In the second problem class we always have to check possible contact for the present deformation state;see the simple situation depicted in Figure10.4.rge sliding of a node over a surface.10.1Contact Search315 This means every object/finite element has to be checked against every other object/finite element.When the contact problem is discretized by Nfinite elements,the order of contact checks is N2.Associated algorithms result, even for not too large numbers of N,in very slow algorithms,and thus are called exhaustive algorithms.Hence one has to construct fast algorithms for this task.The following schemes have been developed to date:•Grid cell algorithms,based on a subdivision of the space which contains the discrete solids(simulation space)into uniform cells,see Figure10.5(a).This algorithm type works well when the elements are equally distributed within the cells.If clustering of the elements in a few cells occurs,then this algorithm has no advantages.A variant of this algorithm is to use adaptive grids which accounts for the heterogeneity of the element distribution inFig.10.5.Different sorting strategies.31610Solution Algorithmsspace,see Figure 10.5(c).However,in this scheme,the cost of computing the adaptive grid is not negligible.•A fast method for spatial search is the octree method,which again is based on a grid of rectilinear cells,see Figure 10.5(b),but in this caseonly cells which contain finite elements are kept in the structure of the tree.As pointed out in Williams and O’Connor (1999),the time for search depends upon the first construction of the octree.With special techniques like balancing the tree branches and minimization of the octree depth,one can reduce the search time,see e.g.Knuth (1973).The time to create such an octree is O (N log N )operation,and its evaluation time is of the same order.•Another method developed by Williams and O’Connor (1995)is the spatial heapsort algorithm,in which a list of the elements is sorted by increasingco-ordinates along the axes of the simulation space.This algorithm is often combined with body-based cells,see Figure 10.5(d).It has a performance in time of the order O (N log N )when it is used to sort an unordered set of N elements.The advantages of this algorithm are that no special data structure is required,it is insensitive to the spatial distribution of the object/elements,and it only needs an array of O (N )elements to store the necessary data.Thus,it requires about 10times less storage than the octree method,and less effort is needed to implement it.•Recently,algorithms have been developed in Perkins and Williams (1995)which are insensitive to the object size.These algorithms are thus very wellsuited for discrete finite element analysis in which the size of the finite element chunk broken offis not predictable beforehand.The associated algorithm has a performance of O (N log N ),where N defines the number of objects which can come into contact.10.1.2Contact detection,phase (II)Several cases have to be distinguished when algorithms for contact detection are constructed.These include contact between rigid bodies,between a rigid body and deformable bodies,and between deformable bodies.Since geomet-rical contact conditions have to be formulated with respect to the current configuration (see Chapter 4)different algorithms apply to the cases men-tioned.Here the case of contact between rigid bodies will not be considered;associated formulations may be found in Pfeiffer and Glocker (1996).Contact between rigid and deformable bodies.In this case,one has to find a mathematical model for the rigid body.This body then also defines the contact normal,hence it will be used as master body or reference body.One possibility to describe rigid objects is given by an implicit function as introduced below:f (X,Y,Z )= X −X 0R 1 n 1+ Y −Y 0R 2 n 2+ Z −Z 0R 3n 3−1=0.(10.1)10.1Contact Search317Fig.10.6.Representation of bodies by superquadrics for different exponents n. Some cases of bodies resulting from(10.1)are shown in Figure10.6for n1=n2=n3=n and R1=R2=R3=1.Observe that quite a vari-ety of different shapes can be created.Due to the construction of the implicit function(10.1),the local contact check as to whether a point(slave node) x s={x s,y s,z s}T is inside or outside of the rigid body just follows from apure function evaluation:f(x s,y s,z s).Point x s is outside the rigid body for f>0and inside for f<0.In the case f=0,the contacting point lies on the surface of the rigid body.The normal related to the surface of the rigid bodyis easily obtained byn=grad f|grad f|.(10.2)It can be used to define the local components of the contact stresses in the contact interface for the point x s by evaluating n at x s.Another implicit superquadric for the description of rigid bodies is pre-sented in Hogue(1998).In that paper a generalization is also provided which allows the representation of arbitrary geometries by a discrete function repre-sentation.In the general situation the surface of a body is discretized into a grid of nodes.In between the nodes superquadrics are applied to describe the surface,which leads to a representation that is both discrete and analytical.Contact between deformable bodies.We assume that the global search was successful,and lead to two neighbouringfinite element meshesΩ1 andΩ2.Now situations,as depicted in Figure10.7for the two-dimensional case,have to be investigated in which two bodies can possibly be in contact but it is not clear which slave node contacts which master segment.There are several possibilities to deal with this problem.One approach which also works in the two-and three-dimensional case is described in Benson and Hallquist (1990).It splits the detection of local contact for a given slave node x s(see Figure10.7)into three different phases,which consist of31810Solution Algorithms1.Identification of the closest master node x 1k for x s .This can be performed locally by searching for the minimum distance of master nodes x 1k onsurface ∂Ω1to the slave node x s as min k =1,...,c +1 x s −x 1k .In Figure 10.7the result of this search for all nodes x 1k of the master surface is nodex 1i .2.Check all finite elements which are adjacent to x 1i and determine the ele-ment face which contains the projection ¯x1,see (4.3).In the case depicted we obtain the side defined by a 1i pute the convective coordinates ¯ξof the projection using the algo-rithms stated in Chapter 9for different discretizations.Details of actual implementations can be found in Benson and Hallquist (1990).Note that determination of the closest master node and search for the associated elements in phases 1and 2is local in nature when appropri-ately implemented.Hence the algorithms are of the O (N )-type.The effort which one has to spend in phase 3depends upon the contact discretization.For the node-to-segment discretization in two dimensions,a closed form solu-tion is obtained,see (9.3).The same also holds for three dimensions when the master surface is interpolated using linear triangles,see (9.107).In all other cases,a Newton iteration has to be applied to find ¯ξ,e.g.see (9.82).Note that in phase 2of the procedure stated above,we can have situations in which the projection onto the master surface is not uniquely defined,see also Remark 4.1.Such a situation is depicted in Figure 10.8,where a projection ofthe slave node x s onto two master surfaces,x 1i —x 1i −1or x 1i +1—x 1i ,is possible.This yields two different values of the gap function:g i −1and g i +1.In cases like that,one has to decide within the algorithm which master segment is the correct one.This can be done by trial and error methods,or by smoothing of the local segment geometry by a C 1function,as described in Section 9.6.Another sound way to tackle this problem is to apply strategies known fromFig.10.7.Contact detection for the two-dimensional case10.1Contact Search319Fig.10.8.Non-unique projection to master surface. optimization theory which have already been successfully used in multi-surface plasticity,e.g.see Laursen and Govindjee(1994).A different method for the detection of penetration is described in Kane et al.(1999)forfinite element discretizations using a triangulation of the bod-ies.The idea is based on the fact that the interiors of two deformed boundary segments intersect in case of penetration.This observation can be cast for two-dimensional problems into a mathematical formulation by computing the area of the boundary pairs.This area check results in negative areas when pen-etration occurs.Hence,the contact constraint(4.6)can be put in the formA s≥0.(10.3) In the case of a linear segment,defined in Section9.1,the area can be com-puted for a counter-clockwise numbering of surface nodes byA s=[(x2i−x1k)×(x2i−x2i+1)]·[(x1k+1−x1k)×(x1k+1−x2i+1)][(x2i−x2i+1)×(x1k+1−x1k)]·e3,(10.4)where x2i,x2i+1,x1k and x1k+1are the coordinates describing the deformed con-figuration of the intersection segments,see Figure10.9.The segments whichhave to be tested are again found by methods derived for the spatial search,see Section10.1.1.We note that the area can also be used as a constraintfunction,as has been proposed in Kane et al.(1999),since A s≥0excludes possible penetrations.Since the denominator of(10.4)is always positive,theauthors noted that the polynomial constraint functiong As=[(x2i−x1k)×(x2i−x2i+1)]·[(x1k+1−x1k)×(x1k+1−x2i+1)](10.5) could be employed instead of(10.4),which yields much simpler constraint equations,and hence is algorithmically advantageous.In the case of three-dimensional applications,the intersection of boundaryfaces has to be considered,which leads to a volume check.Explicit formulasfor this check can be found in Kane et al.(1999)who also use the inequality32010Solution AlgorithmsFig.10.9.Detection of local contact by area checkconstraint V s≥0for three-dimensional contact problems.REMARK10.1:In some applications it is possible that a body comes into contact with itself.This is depicted in Figure10.10,where the straight line is bent over,and hence the last node x1N in the deformed configuration comes into contact with the segment associated with node x1i.Thus we have a master node which in the deformed configuration has to be treated like a slave node.Such behaviour,which is called self-contact,often occurs in crash simulations or in large deformation analysis of rubber bearings.In that case,the global search has to be extended such that contact of one surface with itself can be detected.This is more complicated than the standardFig.10.10.Self-contact of a line.10.2Solution Methods for Unconstrained Nonlinear Problems321 contact detection between two different bodies.Associated algorithms can be found in Benson and Hallquist(1990).10.2Solution Methods for Unconstrained Nonlinear ProblemsSome of the contact formulations stated in Chapter6reduce the variational inequalities to variational equations.This means that within an iterative step of the solution of the variational inequality,one can apply solution meth-ods which were developed for unconstrained problems.These are discussed in this section.Since most applications in engineering also require the consider-ation of nonlinear effects such asfinite deformations or nonlinear constitutive relations,one needs solution methods which can cope with these different phenomena.In casefinite element discretizations are used to approximate the physical problem,the discretization process leads to a discrete system of nonlinear equations,see(7.53).In the following,we distinguish between time-independent and time-dependent problems.In the following we discuss several algorithmic aspects for unconstraint problems,which are often also basis for the solution of constraint problems.10.2.1Algorithms for time-independent problemsFinite element approximations using the interpolations described in Chapter 7lead to the above-mentioned system of nonlinear equations.For the con-struction of nonlinear solution algorithms,we rewrite(7.53):G(u,κ)=R(u)−κP=0,u∈R N.(10.6) The scaling factorκ,also known as the load parameter,was introduced to be able to apply the load ually,the scaling factor is a problem given quantity,but it can also be useful to viewκas additional variable when special algorithms are used to follow a highly nonlinear load path.To solve(10.6)by an iterative method,the following standard schemes for unconstrained problems can be applied:-fix point method,-Newton–Raphson method,-Quasi-Newton methods,and-arc-length methods.From the list of algorithms,given above,we only state the Newton–Raphson method.The other methods are discussed in detail in the literature, e.g.see Matthies and Strang(1979),Luenberger(1984)or Bazaraa et al. (1993)for quasi-Newton methods,and Riks(1972),Keller(1977),Ramm32210Solution Algorithms(1981),Crisfield(1981),Riks(1984),Schweizerhof and Wriggers(1986),Wag-ner and Wriggers(1988),Wagner(1991)or Crisfield and Shi(1991)for thearc-length methods.Overviews are given in Bathe(1996)or Crisfield(1997).In all algorithms a sequence of linear equation systems has to be solvedwithin the iterations.Hence equation solvers have a major contribution to theefficiency of the algorithms.While classical direct methods are still sufficientfor two-dimensional problems,one has to apply iterative solvers like conjugategradient schemes,multi-grid techniques or refined sparse-direct solvers forlarge three-dimensional problems,e.g.see Hackbusch(1991),Schwetlick andKretschmar(1991),Axelsson(1994),Duffet al.(1989),Kickinger(1996),Boersma and Wriggers(1997),Wriggers and Boersma(1998)and Davis andDuff(1999).The method which is used most frequently for the solution of nonlinearsystems of equations is the Newton–Raphson method.It starts from aTaylor series expansion of(10.6)at a known state u k,G(u k+Δu,¯κ)=G(u k,¯κ)+D G(u k,¯κ)Δu+r(u k,¯κ).(10.7) The load parameter¯κreflects the load level for which the solution has tobe computed.D G·Δu is the directional derivative which is obtained bylinearization of G at u k;for details see Chapters7or9.The linearization ofG yields a matrix,also known as a Hesse,Jacobi or tangent matrix.It willbe abbreviated by K T(see Chapter7).By neglecting the second order termdefined by vector r in(10.7),one can derive the iterative algorithms,statedin Box1,to solve(10.6)for a given load increment at levelκ=¯κ.The algorithm is graphically described in Figure10.11for the simplifiedequationˆR(u)−¯κ=0.The convergence rate of this method is characterizedby the inequality u k+1−u ≤C u k−u 2,where u is solution of(10.6), e.g.see(Isaacson and Keller(1966).This behaviour manifests the quadraticalconvergence rate of the Newton–Raphson method in the vicinity of thesolution.Since the quadratic rate of convergence is obtained only locally,onehas to enhance the algorithms so that they also becomes globally convergent.However,this cannot be achieved in all cases.Possible methods which yieldglobally convergent schemes are line search techniques,e.g.see LuenbergerInitialize algorithm:set u0=u kLOOP over iterations:i=0,..,convergenceSolve:K T(u i)Δu i+1=−G(u i,¯κ)update displacements:u i+1=u i+Δu i+1Check for convergence: G(u i+1,¯κ) ≤T OL⇒STOPEND LOOPBox1.Newton–Raphson algorithm.。