第五回PLC open的Safety FB
电气控制与PLC第五章课后答案

电⽓控制与PLC第五章课后答案第五章作业答案1、S7-200指令参数所⽤的基本数据类型有哪些?S7-200 PLC的指令参数所⽤的基本数据类型有1位布尔型(BOOL)、8位字节型(BYTE)、16位⽆符号整数(WORD)、16位有符号整数(1NT)、32位⽆符号双字整数(DWORD)、32位有符号双字整数(DINT)、32位实数型(REAL)。
实数型(REAL)是按照ANSI/IEEE754-1985标准(单精度)的表⽰格式规定。
2、⽴即I/O指令有何特点?它应⽤于什么场合?⽴即指令允许对输⼊和输出点进⾏快速和直接存取。
当⽤⽴即指令读取输⼊点的状态时,相应的输⼊映像寄存器中的值并未发⽣更新;⽤⽴即指令访问输出点时,访问的同时,相应的输出寄存器的内容也被刷新。
只有输⼊继电器I和输出继电器Q可以使⽤⽴即指令。
7、写出图5-48所⽰梯形图的语句表程序。
LD I0.0 LD Q0.1O I0.3 TON T37,30LD I0.1 LD T37O I0.4 S Q0.2, 4ALD LD I0.1AN I0.2 S Q0.3, 1= Q0.18、写出图5-49所⽰梯形图的语句表程序。
LD I0.4 A V3.1EU R Q3.1, 1SHRB I0.5, V3.0, 4 LRDLD I0.1 A V3.2LPS S Q3.2, 3A V3.0 LPPS Q3.0, 2 A V3.3LRD R Q3.3, 19、⽤⾃复位式定时器设计⼀个周期为5s,脉冲为⼀个扫描周期的脉冲串信号。
10、设计⼀个计数范围为50 000的计数器。
13、⽤寄存器移位指令(SHRB)设计⼀个路灯照明系统的控制程序,3路灯按H1→H2→H3的顺序依次点亮。
各路灯之间点亮的间隔时间为10h⽤PLC输出点Q0.0~Q0.2分别控制路灯H3~H114、⽤循环移位指令设计⼀个彩灯控制程序,8路彩灯串按Hl→H2→H3→…H8的顺序依次点亮,且不断重复循环。
第一回 使用IEC 61131-3和PLCopen的目的

第一回使用IEC 61131-3和PLCopen的目的为从事PLC应用开发技术人员,进行此次说明,主要涉及IEC 61131-3国际标准和开发并有效推进该标准发展的PLCopen组织相关介绍。
IEC 61131-3的诞生为了满足美国通用汽车制造部门的设备改造要求(表1),1969年Modicon公司(现归施耐德电气)开发出了符合的084型产品。
满足了当时主要进行的顺序控制以及安全互锁逻辑控制、定时器控制等。
PLC的诞生,使得工业控制技术得到飞跃发展。
进入上世纪70年代,欧洲和日本也进行了独立开发和应用。
1972年,日本的首台PLC SYSMAC(当时的立石电机)在欧姆龙公司诞生。
然而,因为每个设备制造商都采用各自的程序编辑软件和编程语言,这就使得使用者在每次更改设备时都要重新学习新设备系统,或一直使用特定制造商的产品。
这样的情况,对制造商和使用者而言,都不能说是最好的结果。
以欧洲为中心,产生了“尊重制作商的硬件独立性,但统一编程语言设计”这一举动。
根据这样的背景,由IEC SC65B/WG7/TF3国际标准的制定工作开始,1993年PLC 的程序设计语言的国际标准「IEC 61131-3」被发行了。
本规格规定着包含是以前主要的梯形图语言在内的四种语言和一个要素。
之后,1997年JIS标准(日本),2006年GB/T标准(中国)和各国的国家标准也采用这一标准(表2)。
国土交通省发行的「公共建筑工程标准规范书(电气设备工程编辑H25年版)」JIS B 3501~B3503标准依据的可编程控制器标准,指定从事公共事业的工程标准。
PLCopen组织PLCopen是为了提高PLC的应用开发效率而在1992年设立的第三方机构。
其欧洲本部中心设在荷兰,在北美、日本、中国都设立了分支机构,2013年9月设立了韩国分部。
其组织结构如图1所示。
目前,全世界约有100个会员公司。
在日本,PLCopen组织从2002年真正的开展运营,制造商会员有包括欧姆龙公司在内共18个会员单位,使用者会员更有350个以上(截至2013年10月)。
PLC第5章全

按控制过程的变化参量进行控制的关 键是正确选择控制参量、确定控制原则,并 选定能反映该控制参量变化的电器元件。
39
钻削加工时,刀架的自动循环过程工艺要 求如下: ①自动循环:即刀架能自动地由位置1移动到 位置2进行钻削加工并自动退回位置1。 ②无进给切削:刀具到达位置2时不再进给, 但钻头继续旋转进行无进给切削以提高工作加 工精度。 ③快速停车:当刀架退出后,要求快速停车, 以减少辅助工时。
37
5.2.2 按控制过程变化参量进行控制
现代化工业生产中,为提高劳动生产率, 降低成本,要求实现整个生产工艺过程全盘自 动化,例如机床的自动进刀,自动退刀,工作 台往复循环等加工过程自动化;高炉实现整个 炼铁过程的自动化等,由于自动化程度的提高, 只用简单的联锁控制已不能满足要求,需要根 据工艺过程特点进行控制。
24
5.2.1.3 按顺序工作时的联锁控制
在生产实践中,需要求各种运动部件之间或生产机械之间 能够按顺序工作,例如,车床主轴转动时,要求油泵先给润滑, 主轴停与后方停止润滑,控制对象对控制线路提出了按顺序工 作的联锁要求,可将KM1的常开触点串入主轴接触器KM2线圈电 路,实现油泵先起动,主轴后起动。P103、图5-4,从图中可 知,只有KM1先通电(按SB2)常开触点闭合,主轴电机接触器 KM2才能通电。按下SB4,若将KM2的常开触点并接在油泵电机 的停止按钮SB上,即主轴电机起动后,油泵电机停止按钮SB1 被短路,不再起作用,直到KM2断电,SB1才能起作用。做到了 先停主电机再停油泵。
10
5.2 组成电器控制线路 的基本规律
基本规律有二:
1.联锁控制规律 2.按变化参量控制的规律
11
5.2.1 按联锁规律控制
【机械类文献翻译】应用先进的PLCopen运动控制库61499独立伺服驱动IEC基础自动化和控制系统

应用先进的PLCopen运动控制库61499独立伺服驱动IEC基础自动化和控制系统C. Su ¨ nde r OVE, A. Zoitl, F. Mehofer, B. Favre-Bulle IEEE本文介绍了利用独立运动控制在分散式自动化系统中的应用。
目前基于IEC 61131意识缺乏一套无间隙集成结构系统功能单位。
新概念的基础PLCopen运动控制建立一个数据库,并将其应用到参考模型的新标准IEC 61499。
关键词:分配自动化系统;独立主件,运动控制;PLCopen IEC 61499运动控制数据库1。
介绍在过去的十年,在自动化和控制系统中运动控制的整合成可编程逻辑控制器(plc)是一个大的课题。
目前编程运动和控制逻辑于plc紧密结合起来。
一个主要目的是组织开发了一种规格(2005年),PLCopen轴线控制等功能模块按IEC(国际电工委员会)使用61131-3(约翰,Tiegelkamp,1995)。
规格包括界面的功能块的轴转动。
当用户面临相同的命令集和不同plc 编程风格的供应商时, PLCopen主张统一规格。
另一方面自动化系统是典型零部件组装出综合计算能力。
常用的方法是根据使用轮廓的组成部分使用现场总线接口与定义装置。
如伺服驱动著名的例子是DSP-402从或PROFIdrive 从。
这些组件需要一个优良的控制系统,在大多数情况下可编程序控制器(PLC)使用。
有些厂商已融入到他们的伺服驱动可编程序控制器(PLC),比如(Baumuller,2005)作为典型的例子。
按IEC61131-3,伺服驱动成为一种功能部件,其中还包括控制逻辑程序。
整个系统演化成一个分散式自动化系统具有几个协作独立单位。
其中以目前的情况,有关伺服驱动是不令人满意。
IEC定义了一个集中的自动化系统,因缺乏适当的概念变分散式系统。
每个组成部分是被分开考虑,所以厂商需解决问题是整个伺服驱动系统被合作使用专。
《PLC应用技术》第5章参考答案

思考与练习参考答案
1. 答:只具有接通(ON或1)或断开(OFF或0)两种状态的元件称为位元件。
字元件是位元件的有序集合。
FX系列的字元件最少4位,最多32位。
字元件有位组件和T、C、D、V、Z等寄存器。
2. 解:
K1X0:X3~X0、4位
K2M10:M17~M10、8位
K8M0:M31~M0、32位
K4S0:S15~S0、16位
K2Y0:Y7~Y0、8位
K3X10:X23~X10、12位
3. 答:16位数据寄存器所能表示的有符号数的范围为K-32 768~32 767。
所能表示的十六进制数的范围为H0~H0FFFF。
32位数据寄存器所能表示的有符号数的范围为K-2 147 483 648~2 147 483 647,所能表示的十六进制数的范围为H0~H0FFFF FFFF。
4. 答:Y0、Y2状态为1,Y1、Y3状态为0。
5. 解:
9. 解:
10. 解:
12. 解:
15. 解:设数据由K1X0构成。
16. 解:程序运行结果如下图所示。
17. 解:
18. 解:
21. 解:
23. 解:(D0)的数据为H0A2B1;(M8022)为1。
24. 答:(D0)数据为H0B1A2,(M8022)为1。
26. 答:Y17~Y0的各位状态为0000 0000 1001 1001 。
27. 解:设X0为启动按钮,X1为停止按钮。
29. 解:。
基于PLCopen Safety的数控系统安全PLC软件系统

基于PLCopen Safety的数控系统安全PLC软件系统
刘武垚;朱志红;吕晓凡;刘东辉
【期刊名称】《组合机床与自动化加工技术》
【年(卷),期】2022()4
【摘要】为了规范和简化符合功能安全标准的PLC开发流程,使用顺序功能图实现了PLCopen Safety标准规定的安全功能块,并集成到Beremiz开发环境中。
针对数控机床的运行特点,基于PLCopen Safety标准设计了安全PLC的软件系统,配合相应的安全硬件可以实现对数控系统的安全监控。
经过实验表明设计的安全系统可以稳定可靠实现安全功能,对开发符合功能安全的PLC软件具有一定的指导意义。
【总页数】5页(P114-117)
【作者】刘武垚;朱志红;吕晓凡;刘东辉
【作者单位】华中科技大学国家数控系统工程技术研究中心;武汉华中数控股份有限公司
【正文语种】中文
【中图分类】TH165;TG502
【相关文献】
1.浅谈华中系统数控车床PLC软件系统设计
2.基于Safety Case理论的民机平视显示系统安全性评估
3.基于PLCopen标准的剪板机数控系统设计
4.基于PLCopen的数控机械控制器研究与开发
5.基于改进AHP和云模型的雷达软件系统安全性评价
因版权原因,仅展示原文概要,查看原文内容请购买。
基于PLCopen的数控机械控制器分析
基于PLCopen的数控机械控制器分析摘要:文章简单说明了基于PLCopen的数控机械控制器的总体设计思路,并从基于PLCopen的数控机械控制器设计关键点、Visual C++环境下PLCopen运动控制的实现、PLCopen运动控制库的设计与实现、典型数控机械的实现这几方面入手,着重阐述了基于PLCopen的数控机械控制器设计方案与实现要点,以期为相关工作人员展开数控机械控制器优化开发项目实践中提供一些借鉴。
关键词:PLCopen;数控机械控制器;运动控制库引言:为提升数控机械控制系统的灵活性、通用性,强化其运行效率以及使用便捷程度,可以应用PLCopen这种新技术理念落实对数控机械控制器的设计,更新开发设计方案。
一、基于PLCopen的数控机械控制器的总体设计思路在开发设计PLCopen运动控制功能块的实践中,可以应用IEC 61141-3内FBD语言完成编程,引入“Look and feel”设计理念,设定其中的主要内容包括输入变量、输出变量、内部运动控制算法、功能块标识等等。
定义各个功能模块,即定义各个以PLCopen运动控制功能块标识的衍生数据,结合具体运动控制功能,完成对输入变量以及输出变量的确定。
对于PLCopen运动控制功能块而言,运动控制算法为该功能块的功能核心,一般情况下,该部门普遍针对用户进行隐蔽,落实了封装,而在实际的使用期间,用户可以单纯结合自己的控制需求选取相对应的功能模块,结合对应输出与输入量的计算,即可实现所需功能。
切实参考基本数据类型、类属数据库类型、导出数据库类型完成对PLCopen运动控制库类型的确定。
在进行PLCopen运动控制库的开发设计期间,需要重点把握的数据主要有以下几种,即:运动控制相关数据、轴与轴组相关数据、运动参数相关数据。
其中,对于轴与轴组相关数据而言,最为常见的类型包括AXIS_RFE以及AXES_GROUP_RFE,保证相应数据类型贯穿于整个设计方案,其他数据类型能够直接或是间接的为该数据提供服务[1]。
安全软件技术规范
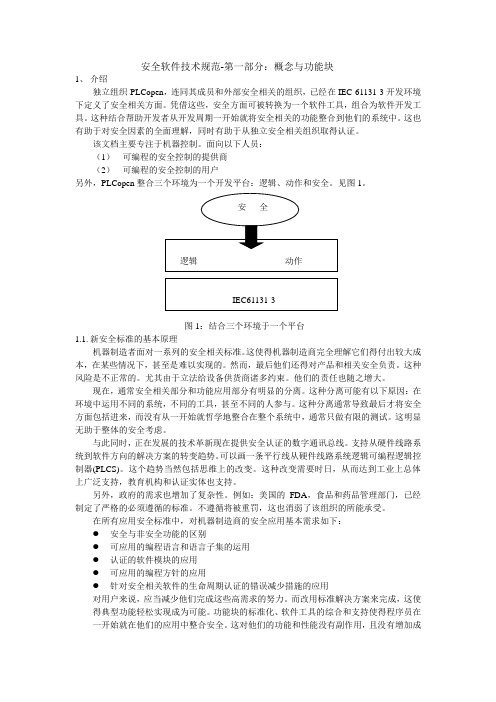
安全软件技术规范-第一部分:概念与功能块1、介绍独立组织-PLCopen,连同其成员和外部安全相关的组织,已经在IEC-61131-3开发环境下定义了安全相关方面。
凭借这些,安全方面可被转换为一个软件工具,组合为软件开发工具。
这种结合帮助开发者从开发周期一开始就将安全相关的功能整合到他们的系统中。
这也有助于对安全因素的全面理解,同时有助于从独立安全相关组织取得认证。
该文档主要专注于机器控制。
面向以下人员:(1)可编程的安全控制的提供商(2)可编程的安全控制的用户另外,PLCopen整合三个环境为一个开发平台:逻辑、动作和安全。
见图1。
图1:结合三个环境于一个平台1.1.新安全标准的基本原理机器制造者面对一系列的安全相关标准。
这使得机器制造商完全理解它们得付出较大成本,在某些情况下,甚至是难以实现的。
然而,最后他们还得对产品和相关安全负责。
这种风险是不正常的。
尤其由于立法给设备供货商诸多约束。
他们的责任也随之增大。
现在,通常安全相关部分和功能应用部分有明显的分离。
这种分离可能有以下原因:在环境中运用不同的系统,不同的工具,甚至不同的人参与。
这种分离通常导致最后才将安全方面包括进来,而没有从一开始就哲学地整合在整个系统中,通常只做有限的测试。
这明显无助于整体的安全考虑。
与此同时,正在发展的技术革新现在提供安全认证的数字通讯总线。
支持从硬件线路系统到软件方向的解决方案的转变趋势。
可以画一条平行线从硬件线路系统逻辑可编程逻辑控制器(PLCS)。
这个趋势当然包括思维上的改变。
这种改变需要时日,从而达到工业上总体上广泛支持,教育机构和认证实体也支持。
另外,政府的需求也增加了复杂性。
例如:美国的FDA,食品和药品管理部门,已经制定了严格的必须遵循的标准。
不遵循将被重罚,这也消弱了该组织的所能承受。
在所有应用安全标准中,对机器制造商的安全应用基本需求如下:●安全与非安全功能的区别●可应用的编程语言和语言子集的运用●认证的软件模块的应用●可应用的编程方针的应用●针对安全相关软件的生命周期认证的错误减少措施的应用对用户来说,应当减少他们完成这些高需求的努力。
PLC编程及应用答案寥常初主编第五章习题1_16精选全文完整版
可编辑修改精选全文完整版
PLC编程及应用
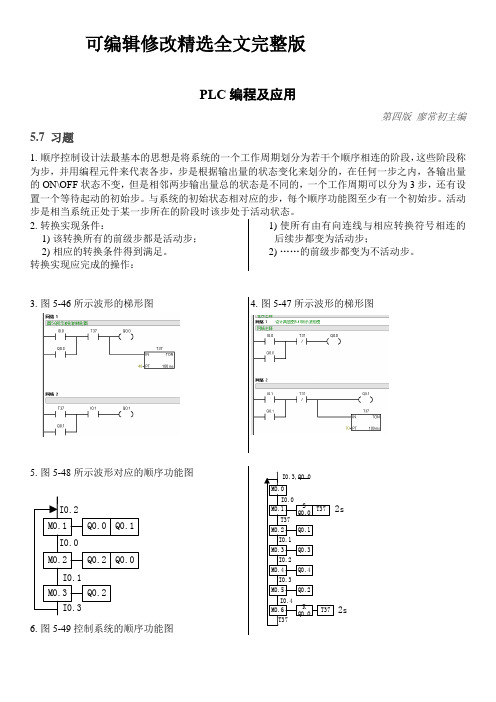
第四版廖常初主编5.7 习题
1.顺序控制设计法最基本的思想是将系统的一个工作周期划分为若干个顺序相连的阶段,这些阶段称为步,并用编程元件来代表各步,步是根据输出量的状态变化来划分的,在任何一步之内,各输出量的ON\OFF状态不变,但是相邻两步输出量总的状态是不同的,一个工作周期可以分为3步,还有设置一个等待起动的初始步。
与系统的初始状态相对应的步,每个顺序功能图至少有一个初始步。
活动步是相当系统正处于某一步所在的阶段时该步处于活动状态。
2.转换实现条件:
1)该转换所有的前级步都是活动步;
2)相应的转换条件得到满足。
转换实现应完成的操作:1)使所有由有向连线与相应转换符号相连的后续步都变为活动步;
2)……的前级步都变为不活动步。
3.图5-46所示波形的梯形图
4.图5-47所示波形的梯形图
5.图5-48所示波形对应的顺序功能图
6.图5-49控制系统的顺序功能图
2s
7. 图5-50小车运动顺序功能图
8. Q0.3不能作为转换信号,I0.5不能作为输出
等…… 9. 图5-52控制系统顺序功能图
10. 图5-53的顺序功能图
11. 控制系统的顺序功能图
5s
12. 画出PLC 的外部接线图和控制系统的顺序功能图。
13. 图5-55梯形图
14. SCR 指令设计图5-56的梯形图
15. 图5-57的梯形图
16.
设计5-6T的梯形图。
三菱电机微型可编程控制器MELSEC iQ-F FX5编程手册(指令 通用FUN FB篇)

三菱电机微型可编程控制器MELSEC iQ-FFX5编程手册(指令/通用FUN/FB篇)安全方面注意事项(使用之前请务必阅读。
)使用MELSEC iQ-F系列前,请仔细阅读各产品所附带的手册及附带手册所介绍的关联手册,同时在充分注意安全的前提下正确地操作。
此外,请妥善保管好产品中附带的使用说明,以便需要时可以取阅,并请务必将其交给最终用户的手中。
前言此次承蒙购入MELSEC iQ-F系列可编程控制器产品,诚表谢意。
本手册是用于让用户了解进行编程时必要的指令、通用功能和通用功能块相关内容的手册。
在使用之前应熟读本手册及关联手册,在充分了解MELSEC iQ-F系列的功能·性能的基础上正确使用本产品。
此外,将本手册中介绍的程序示例应用于实际系统的情况下,应充分验证对象系统中不存在控制方面的问题。
此外,希望本手册能够送达至最终用户处。
•产品是以一般的工业为对象制作的通用产品,因此不是以用于关系到人身安全之类的情况下使用的机器或是系统为目的而设计、制造的产品。
•讨论将该产品用于原子能用、电力用、航空宇宙用、医疗用、搭乘移动物体用的机器或是系统等特殊用途的时候,请与本公司的营业窗口查询。
•虽然该产品是在严格的质量体系下生产的,但是用于那些因该产品的故障而可能导致的重大故障或是产生损失的设备的时候,请在系统上设置备用机构和安全功能的开关。
•设置产品时如有疑问,请向具有电气知识(电气施工人员或是同等以上的知识)的专业电气技术人员咨询。
关于该产品的操作和使用方法有疑问时,请向技术咨询窗口咨询。
•本书、技术资料、样本等中记载的事例是作为参考用的,不是保证动作的。
选用的时候,请用户自行对机器·装置的功能和安全性进行确认以后使用。
•关于本书的内容,有时候为了改良可能会有不事先预告就更改规格的情况,还望见谅。
•关于本书的内容期望能做到完美,可是万一有疑问或是发现有错误,烦请联系本公司或办事处。
1目录安全方面注意事项 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1前言 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1关联手册 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16术语 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17手册阅读方法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19第1部分概要第1章指令概要241.1指令的构成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .241.2数据的指定方法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .25位数据 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2816位数据(字数据) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2832位数据(双字数据) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .30实数数据(浮点数据) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .33字符串数据 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .341.3执行条件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .351.4指令处理时间的高速化 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .36第2章编程时的注意事项372.1指令通用的出错 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .372.2执行指令时的软元件、标签的范围检查 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .372.3使用同一软元件的OUT指令、SET/RST指令、PLS/PLF指令时的动作. . . . . . . . . . . . . . . . . . . .382.4一般标志位的处理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .432.5关于通用功能/通用块的返回值. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .45第2部分指令/函数一览表第3章CPU模块用指令483.1顺控程序指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .483.2基本指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .523.3应用指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .663.4步梯形图指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .843.5PID控制指令. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .84第4章模块专用指令854.1网络通用指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .854.2以太网用指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .854.3CC-Link IE现场网络用指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .874.4高速计数器指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .874.5外部设备通信指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .884.6定位指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .894.7BFM分割读取/写入指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .90 23CO N T E N T S 第5章通用功能/通用块915.1通用功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .91类型转换功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .91单数值变量功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .96功能符号 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .97位移功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .98位型布尔功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .98选择功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .99比较功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .99字符串功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100时间数据类型功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1015.2通用功能块一览 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102双稳态功能块 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102边缘检测功能块 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102计数器功能块 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102定时器功能块 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103第3部分CPU模块用指令第6章顺控程序指令1066.1触点指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106运算开始、串联连接、并联连接 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106脉冲运算开始、脉冲串联连接、脉冲并联连接 . . . . . . . . . . . . . . . . . . . . . . . . . . . 108脉冲否定运算开始、脉冲否定串联连接、脉冲否定并联连接 . . . . . . . . . . . . . . . . . . . . . 1106.2结合指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112梯形图块串联连接、并联连接 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112运算结果推入、读取、弹出 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113运算结果取反 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114运算结果脉冲化 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1156.3输出指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116OUT(定时器、计数器、报警器除外). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116定时器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117计数器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119超长计数器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120报警器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122软元件的设置(报警器除外) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123软元件的复位(报警器除外) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125报警器的设置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127报警器的复位 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129报警器的设置(带判断时间) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131报警器的复位(小编号复位) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132上升沿输出 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133下降沿输出 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135位软元件输出取反 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136位软元件输出取反 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1376.4移位指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139位软元件移位 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13916位数据的n位右移位. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14116位数据的n位左移位. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143n位数据的1位左移位 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146n字数据的1字右移位 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147n字数据的1字左移位 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148n位数据的n位右移位 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149n位数据的n位左移位 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151n字数据的n字右移位 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153n字数据的n字左移位 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1556.5主控制指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157主控制的设置、复位 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1576.6结束指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161主程序结束 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161顺控程序结束 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1626.7停止指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164顺控程序程序停止 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164第7章基本指令1657.1比较运算指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165BIN16位数据比较. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165BIN32位数据比较. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167BIN16位数据比较输出. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169BIN32位数据比较输出. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171BIN16位数据带宽比较. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173BIN32位数据带宽比较. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175BIN16位块数据比较. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177BIN32位块数据比较. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1797.2算术运算指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181BIN16位加法运算. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181BIN16位减法运算. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186BIN32位加法运算. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191BIN32位减法运算. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196BIN16位乘法运算. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201BIN16位除法运算. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205BIN32位乘法运算. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209BIN32位除法运算. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213BCD4位数加法运算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 216BCD4位数减法运算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 218BCD8位数加法运算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 220BCD8位数减法运算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222BCD4位数乘法运算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224BCD4位数除法运算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225BCD8位数乘法运算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227BCD8位数除法运算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 229BIN16位块数据加法运算. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231BIN16位块数据减法运算. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233BIN32位块数据加法运算. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235BIN32位块数据减法运算. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23716位BIN数据递增. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23916位BIN数据递减. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24032位BIN数据递增. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241 45CO N T E N T S 7.3逻辑运算指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24316位数据逻辑积 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24332位数据逻辑积 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24516位块数据逻辑积 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24716位数据逻辑和 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24932位数据逻辑和 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25116位块数据逻辑和 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25316位数据异或 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25532位数据异或 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25716位块数据异或 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25916位数据异或非 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26132位数据异或非 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26316位块数据异或非 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2657.4位处理指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 267字软元件的位设置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 267字软元件的位复位 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26816位测试 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26932位测试 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 270位软元件的批量复位 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 271数据批量复位 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2727.5数据转换指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274BIN数据→BCD4位数转换. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274BIN数据→BCD8位数转换. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 276BCD4位数→BIN数据转换. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 278BCD8位数→BIN数据转换. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 280单精度实数→有符号BIN16位数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282单精度实数→无符号BIN16位数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283单精度实数→有符号BIN32位数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284单精度实数→无符号BIN32位数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285有符号BIN16位数据→无符号BIN16位数据转换 . . . . . . . . . . . . . . . . . . . . . . . . . . . 286有符号BIN16位数据→有符号BIN32位数据转换 . . . . . . . . . . . . . . . . . . . . . . . . . . . 287有符号BIN16位数据→无符号BIN32位数据转换 . . . . . . . . . . . . . . . . . . . . . . . . . . . 288无符号BIN16位数据→有符号BIN16位数据转换 . . . . . . . . . . . . . . . . . . . . . . . . . . . 289无符号BIN16位数据→有符号BIN32位数据转换 . . . . . . . . . . . . . . . . . . . . . . . . . . . 290无符号BIN16位数据→无符号BIN32位数据转换 . . . . . . . . . . . . . . . . . . . . . . . . . . . 291有符号BIN32位数据→有符号BIN16位数据转换 . . . . . . . . . . . . . . . . . . . . . . . . . . . 292有符号BIN32位数据→无符号BIN16位数据转换 . . . . . . . . . . . . . . . . . . . . . . . . . . . 293有符号BIN32位数据→无符号BIN32位数据转换 . . . . . . . . . . . . . . . . . . . . . . . . . . . 294无符号BIN32位数据→有符号BIN16位数据转换 . . . . . . . . . . . . . . . . . . . . . . . . . . . 295无符号BIN32位数据→无符号BIN16位数据转换 . . . . . . . . . . . . . . . . . . . . . . . . . . . 296无符号BIN32位数据→有符号BIN32位数据转换 . . . . . . . . . . . . . . . . . . . . . . . . . . . 297BIN16位数据→格雷码转换. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 298BIN32位数据→格雷码转换. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 299格雷码→BIN16位数据转换. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 300格雷码→BIN32位数据转换. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30110进制ASCII→BIN16位数据转换 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30210进制ASCII→BIN32位数据转换 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 304ASCII→HEX转换 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 306字符串→BIN16位数据转换. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 309字符串→BIN32位数据转换. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311BIN16位数据2的补数(符号取反) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314BIN32位数据2的补数(符号取反) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3158→256位解码 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 316256→8位编码 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3187段解码. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3197SEG码时分显示 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32116位数据的4位分离. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32316位数据的4位合并. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324任意数据的位分离 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325任意数据的位合并 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 327字节单位数据分离 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 329字节单位数据合并 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3317.6数字开关 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3337.7数据传送指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33516位数据传送 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33532位数据传送 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33616位数据否定传送 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33732位数据否定传送 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 338位移动 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3391位数据取反传送. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34116位块数据16位传送 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342同一16位块数据传送 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 344同一32位块数据传送 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34516位数据交换 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34632位数据交换 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34716位数据上下字节交换 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34832位数据上下字节交换 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3491位数据传送. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3508进制位传送(16位数据). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3518进制位传送(32位数据). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353n位数据传送. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 355第8章应用指令3578.1旋转指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35716位数据的右旋 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35716位数据的左旋 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36032位数据的右旋 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36332位数据的左旋 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3658.2程序分支指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 367指针分支 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 367跳转至END. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3708.3程序执行控制指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 371中断禁止、中断允许 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 371指定优先度以下的中断禁止 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373中断程序屏蔽 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 376指定中断指针的禁止/允许. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 378从中断程序返回 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 379WDT复位. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3808.4结构化指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 381FOR~NEXT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 381 67CO N T E N T S FOR~NEXT强制结束. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383子程序调用 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 385从子程序返回 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 389子程序调用 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3908.5数据表操作指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 392从数据表的先入数据读取 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 392从数据表的后入数据读取 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394至数据表的数据写入 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 396数据表的数据插入 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 398数据表的数据删除 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4008.6数据读取/写入指令. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 402从数据存储器的数据读取 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403至数据存储器的数据写入 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4058.7扩展文件寄存器操作指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 408扩展文件寄存器读取 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 408扩展文件寄存器写入 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 411扩展文件寄存器批量初始化 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4148.8字符串处理指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 417字符串比较 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 417字符串的合并 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 420字符串传送 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423BIN16位数据→10进制ASCII转换 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 425BIN32位数据→10进制ASCII转换 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 427HEX代码数据→ASCII转换 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 429BIN16位数据→字符串转换. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 433BIN32位数据→字符串转换. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 436单精度实数→字符串转换 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 439字符串的长度检测 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 444从字符串的右侧开始提取 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 446从字符串的左侧开始提取 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 448字符串中的任意提取 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 450字符串中的任意替换 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 452字符串查找 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455字符串插入 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 457字符串删除 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4598.9实数指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 461单精度实数比较 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 461单精度实数比较 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4632进制浮点带宽比较. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 465单精度实数加法运算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 467单精度实数减法运算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 470单精度实数加法运算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 473单精度实数减法运算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 475单精度实数乘法运算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 477单精度实数除法运算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 479单精度实数乘法运算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 481单精度实数除法运算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 483带符号BIN16位数据→单精度实数转换. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 485无符号BIN16位数据→单精度实数转换. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 486带符号BIN32位数据→单精度实数转换. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 487无符号BIN32位数据→单精度实数转换. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 488字符串→单精度实数转换 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4892进制浮点→10进制浮点转换. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49210进制浮点→2进制浮点转换. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 494单精度实数符号取反 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 496单精度实数数据传送 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 497单精度实数SIN运算. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 498单精度实数COS运算. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 500单精度实数TAN运算. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 502单精度实数SIN-1运算. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 504单精度实数COS-1运算. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 506单精度实数TAN-1运算. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 508单精度实数角度→弧度转换 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 510单精度实数弧度→角度转换 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 512单精度实数平方根 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 514单精度实数指数运算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 515单精度实数自然对数运算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 517单精度实数幂运算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 519单精度实数常用对数运算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 521单精度实数最大值搜索 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 523单精度实数最小值搜索 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5258.10随机数指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 527随机数发生 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5278.11变址寄存器操作指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 528变址寄存器的批量保存 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 528变址寄存器的批量恢复 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 530变址寄存器/超长变址寄存器选择保存. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 531变址寄存器/超长变址寄存器选择恢复. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5338.12数据控制指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 534BIN16位数据上下限限位控制. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 534BIN32位数据上下限限位控制. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 536BIN16位数据死区控制. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 538BIN32位数据死区控制. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 540BIN16位数据区域控制. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 542BIN32位数据区域控制. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 544BIN16位单位标度(各点坐标数据). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 546BIN32位单位标度(各点坐标数据). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 549BIN16位单位标度(各X/Y坐标数据) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 552BIN32位单位标度(各X/Y坐标数据) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5558.13特殊定时器指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 558示教定时器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 558特殊功能定时器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5608.14特殊计数器指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 562带符号32位升值/降值计数器. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5628.15就近控制指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 564旋转台的就近控制 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5648.16斜坡信号指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 567控制斜坡信号 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5678.17脉冲系统指令 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 570BIN16位脉冲密度的测定. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 570BIN32位脉冲密度的测定. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 574BIN16位脉冲输出. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 578 8。
PLC学习笔记第一册第五章

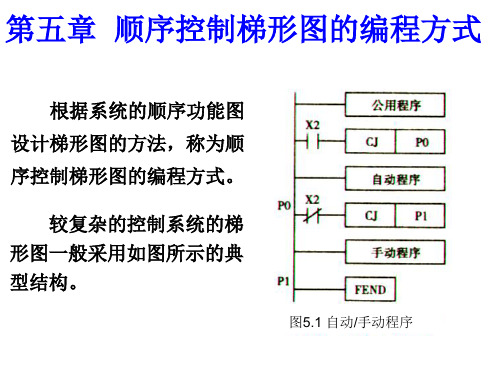
第五章PLC 顺控指令SFC 的编程方法第三章第二节中介绍了编程软件编写SFC 图,但这种方法应用很多人不太了解多人不太了解,,为了加深印象为了加深印象,,这里作为一个章节这里作为一个章节录下笔记录下笔记录下笔记,,以加深印象印象。
本章主要介绍在三菱PLC 编程软件GX Developer 中怎编制SFC 顺序功能图顺序功能图。
下面以例题1介绍SFC 程序的编制法程序的编制法。
一、单流程SFC 程序的编制法程序的编制法::例题1:自动闪烁信号生成自动闪烁信号生成,,PLC 上电后Y0、Y1以一秒钟为周期交替闪烁期交替闪烁。
本例的梯形图本例的梯形图和指令表和指令表和指令表((如图5-1)。
图5-1自动闪烁自动闪烁控制控制控制梯形图和指令表梯形图和指令表5-1 (C)下面开始对图5-1(c)所示的SFC 程序进行一下总体认识一个完整的SFC 程序包括初始状态程序包括初始状态、、方向线方向线、、转移条件和转移方向组成(如图5-1(c 。
))。
在在SFC 程序中初始状态必须是有效的程序中初始状态必须是有效的,,所以要有启动初始状态的条件动初始状态的条件,,本例中梯形图的第一行表示启动初始步本例中梯形图的第一行表示启动初始步,,在SFC 程序中启动初始步要用梯形图程序中启动初始步要用梯形图,,现在开始具体的程序输入现在开始具体的程序输入。
启动GX Develop 编程软件编程软件,,单击单击““工程工程””菜单菜单,,点击创建新工程菜单项或点击新建工程按钮(如图5-2)。
图5-2 GX Develop 编程软件窗口弹出创建新工程对话框弹出创建新工程对话框((如图5-3。
)。
我们主要是讲述三菱系列我们主要是讲述三菱系列PLC ,所以在PLC 系列下拉列表框中选择FXCPU ,PLC 类型下拉初始状态符号转移符号+目标号方向线符号转移条件符号列表框中选择FX2N (C ,),在程序类型项中选择在程序类型项中选择SFC ,在工程设置项中设置好工程名和保存路径之后点击确定按钮项中设置好工程名和保存路径之后点击确定按钮。
PLC课件 第五章
8.在转换条件对应的电路中,不能使用 ANB.ORB.MPS.MRD和MPP指令.可以用转换条件对应的 复杂电路来驱动辅助继电器,再用后者的常开触点作转换 条件. 9.与条件跳步指令(CJ)类似,CPU不执行处于断开状态的 STL触点驱动的电路块中的指令,在没有并行序列时,同时 只有一个STL触点接通,因此使用STL指令可以显著地缩短 用户程序的执行时间,提高PLC的输入-输出响应速度.
M3
M2 Y2 T4 车道黄灯 K50
M2 M3 M0 M4 M4 M5 X3 M7
T4
M0
M3 Y0 车道红灯 人行道红灯
T2
M5
M4
T4
M6
M5 T0
人行道绿灯 K150
M7
人行道红灯
M6 M5
M8013
Y4
人行道绿灯闪 人行道绿灯
5.2.4 仅有两步的闭环的处理
如果在顺序功能图中仅有两步组成的小闭环,用起保 停电路设计的梯形图不能正常工作,如图5-18所示。
5.1.4 并行序列的编程方法
M8002
专用镗床工作示意图
S0
X0,X4,X7 启动 夹紧工件 X1 左滑台 右滑台
S20
Y0
X1 已夹紧
快进
X2 工进 X3 快退
X5 工进 X6 快退
快进 X7
S21
X2
Y1 Y2 Y2
S25
X5
Y4 Y5 Y5
快进
X4
S22
X3
S26
X6
工进 X10 快退
松开工件
STL的编程元件是状态继电器——S。使用STL指令的状 态继电器的常开触点称为步进触点,“胖”触点。 S0——S9 用于初始步。 S10——S19 用于自动返回原点。
第四回 PLC open的Motion Control FB

第四回PLC open®的【Motion Control FB】此次将对PLC open®的Motion Control FB(功能块)做简要介绍。
为了更好的说明Motion Control FB的便利性和使用方法,将会结合一些具体的实例来介绍。
实例主要参照的对象就是欧姆龙的NJ系列控制器(支持IEC 61131-3标准Motion Control FB)。
有关IEC 61131-3和PLC open®的信息,请参看第一回内容介绍。
所谓Motion Control FBPLC (Programmable Logic Controller)的运动控制程序,需要依托硬件的支持。
先在特定的内存区里写入数据,如控制所需的定位单位,目标位置等,再对运动控制用的开始和停止进行操作。
以上所用的内存区地址对于不同制造商而言都是不同的,即使是同一个制造商,不同的产品也有可能不同。
为此,使用者需要学习每个制造商,每个产品的程序设计方法,编写程序。
为了解决这样的难题,所以制定了Motion Control FB标准。
Motion Control FB的目标,就是制定动作配置和接口说明的标准化对应,提高兼容性,降低学习成本。
FB本身,也是简便性(Simplicity)和效率性(Efficiency)的体现,在配置时,也考虑了IEC 61131-3的一致性(Consistency)要求等,IEC 61131-3的梯形图(LD)和结构文本(ST)等都能使用。
通过2014年1月Part-1 version2.045FB(单轴控制,多轴的同步控制),Part-4 version1.038FB(插补运动,坐标变换),对每个运动控制FB都做了标准制定。
FB的配置由PLCopen的技术委员会定义,已公开出版。
Motion Control FB的接口为了确保不同制造商标准化运动控制FB的实施,在整个接口界面上需要三个层级的定义(表1)。
plcopen 中文标准 -回复

plcopen 中文标准-回复PLCopen是国际上公认的用于可编程逻辑控制(PLC)编程的标准化体系结构。
本文将详细介绍PLCopen中文标准,并逐步回答相关问题。
第一步:什么是PLCopen?PLCopen是一个由全球自动化行业组织PLCopen组织制定的用于PLC 编程的标准化体系结构。
PLCopen是"PLC开放"的缩写,它旨在提供一种通用的PLC编程方式,以使不同厂商的PLC可以实现相同的功能和性能。
PLCopen标准基于国际标准化组织(ISO)和IEC的标准,并提供了一种通用的方法来编写PLC程序。
第二步:PLCopen的特点是什么?PLCopen的主要特点包括以下几点:1. 简化的编程方法:PLCopen提供了一种简单、统一的编程方法,使得PLC程序的编写更加直观和易于理解。
PLCopen采用了结构化编程的原则,使得程序的开发更加模块化和可重用。
2. 可移植性:PLCopen标准化体系结构确保不同厂商的PLC可以实现相同的功能和性能。
这意味着,一个PLC程序可以轻松地在不同品牌的PLC上进行移植,而不需要进行重写或修改。
3. 丰富的功能库:PLCopen提供了大量的功能库,用于各种不同的应用场景。
这些功能库包括常用的逻辑运算、数学运算、时序控制、通讯和数据处理功能等,使得程序开发更加高效和方便。
4. 开放性和兼容性:PLCopen是一个开放的标准,可以与其他自动化系统(如人机界面、数据库等)进行集成。
它与其他标准(如OPC UA)和开放平台(如ROS)兼容,可以实现不同系统的无缝集成和数据交换。
第三步:PLCopen中文标准的重要性是什么?PLCopen中文标准的重要性在于提供了一种统一的、通用的PLC编程方法。
这对于PLC开发者和自动化行业来说至关重要。
主要有以下几点:1. 降低开发成本:PLCopen中文标准使得PLC程序的开发更加高效和方便。
使用PLCopen标准,开发者可以轻松地编写和调试复杂的控制程序,减少开发时间和成本。
PLCopen发布了运动控制规范的第5和第6部分

PLCopen发布了运动控制规范的第5和第6部分
PLCopen发布了运动控制规范的第5和第6部分
作者机构:不详
来源:国内外机电一体化技术
年:2012
卷:000
期:002
页码:P.8-8
页数:1
中图分类:TP242
正文语种:CHI
关键词:运动控制;使用领域;流体动力;功能
摘要:PLCopen运动控制规范系列已经扩展发布到第5和第6部分,同时增加了新的使用领域。
PLC0pen执行主席EelcovanderWal 先生说:“非常高兴今年我们不仅能够发布基本规范2.0版本,而且还将功能系列扩展到像归零过程和流体动力新的领域。
通过这一点,对于所有应用层面的用户来说,我们都表示了对于运动控制的长期认证承诺以及提供了正确的功能。
”。
plc气缸程序fb块

plc气缸程序fb块English Answer:Introduction:Programmable logic controllers (PLCs) are widely usedin industrial automation to control processes and machinery. Function blocks (FBs) are a powerful tool in PLC programming, allowing users to create modular and reusable code blocks. This article will provide a comprehensiveguide to creating and using PLC cylinder programs in FBs.Creating a PLC Cylinder Program FB:1. Choose a programming software: Select a PLC programming software that supports FBs, such as Siemens TIA Portal or Rockwell Automation Studio 5000.2. Create a new FB: Start by creating a new FB in the software. Assign it a meaningful name that reflects itspurpose, such as "CylinderControlFB."3. Define inputs and outputs: Determine the inputs and outputs required for the cylinder control program. Typical inputs include cylinder position sensors, limit switches, and control signals. Outputs may include solenoid valves, indicator lights, or other actuators.4. Write the logic: Use the software's built-in logic editor to write the ladder logic or structured text for the cylinder control program. The logic should define the conditions for cylinder extension, retraction, and holding.5. Test and debug: Once the logic is written, test and debug the FB by simulating its operation or connecting it to a physical PLC. This will ensure that the FB functions as intended.Using a PLC Cylinder Program FB:1. Insert the FB into a PLC program: Open the PLC program where you want to use the cylinder control FB.Insert an instance of the FB into the program.2. Assign input and output tags: Map the physical input and output devices to the corresponding tags in the FB. This will establish the connection between the FB and the hardware.3. Configure the FB: Set the appropriate parameters and options for the FB. This may include setting the default cylinder position, limit switch values, and other configuration options.4. Test and validate: Test and validate the PLC program to ensure that the cylinder control FB is operating correctly. Check the cylinder movement and verify that it responds to the desired inputs and signals.Additional Considerations:Error handling: Consider implementing error handling mechanisms in the FB to handle unexpected conditions or failures.Documentation: Document the FB thoroughly, including its purpose, inputs, outputs, and logic.Code optimization: Optimize the FB code for performance and efficiency. Use efficient programming techniques and avoid unnecessary loops or calculations.中文回答:引言:可编程逻辑控制器(PLC)广泛应用于工业自动化中,用于控制工艺和机械设备。
第五回PLC open的Safety FB

第五回PLC open®的【Safety FB】上次的主题是“PLCopen的『Motion Control FB』”,为了容易理解「Motion Control FB」的便利性和使用方法,通过举出具体的事例详细介绍。
这第5回的内容,主要针对日益增长的对控制安全性的关注,有关PLCopen的“Safety Function Block (以下简称Safety FB)”说明。
安全保证功能的软件化(Safety Software)近年来,安全保证的必要性逐步提高,主要涉及制造装置和医疗机器,电梯、铁路等的社会基础设施。
这些装置,在以往常常使用安全继电器等,由硬件搭建的安全电路,确保其安全性。
然而,随着过去十多年的技术创新与各公司推出符合IEC 61508国际安全规格的安全控制器,以及不断的降低成本,安全电路的软件化也日趋成熟。
还有,能结合PLC的(Programmable Logic Controller)软件语言,程序设计环境,网络环境的安全控制器也被商品化,对安全电路的软件化引入,门槛也变得越来越低。
安全FB 定义(Safety Function Block)然而,虽说安全电路的软件化变得容易导入起来,但各制造商具有独自设计的Safety FB,独自地取得认证机关的安全认证。
因此,如果使用这些安全控制器,就需要学习各制造商的FB配置和程序设计方法。
还有,如果装置的安全规格认证方式不同,就需要设备的开发者自己向认证机关说明FB配置情况。
再者,制作的安全程序以独立的硬件为依存,软件化的好处也大打折扣。
为了解决这些课题,PLCopen制定了Safety FB规格标准。
PLCopen Safety FB,继承了IEC 61131-3标准的优点,具有程序的再利用性,POU 和任务的概念,同时,FB的接口配置和动作配置也被标准化。
还有,为进行配置制定和认证,欧洲的安全规格认证机关的技术委员会(Technical Committee)也参与了。
PLC的学习第五章

7.常闭触点输入信号的处理 如果将图5-8中FR的触点改为常闭触点,未过载时它是闭合的,I0.5为ON,
梯形图中I0.5的常开触点闭合。梯形图中应将I0.5的常开触点与Q0.0或 Q0.1的线圈串联。过载时FR的常闭触点断开,I0.5变为OFF,梯形图中 I0.5的常开触点断开,使Q0.0或Q0.1的线圈断电,起到了过载保护的作 用。
5.3.4 顺序功能图中转换实现的基本规则
1.转换实现的条件 1) 该转换所有的前级步都是活动步。 2) 相应的转换条件得到满足。 2.转换实现应完成的操作 1) 使所有的后续步变为活动步。 2) 使所有的前级步变为不活动步。 3.绘制顺序功能图时的注意事项 1) 两个步绝对不能直接相连,必须用一个转换将它们分隔开。 2) 两个转换也不能直接相连,必须用一个步将它们分隔开。 3) 不要漏掉初始步。 4) 在顺序功能图中一般应有由步和有向连线组成的闭环。 4.顺序控制设计法的本质 经验设计法试图用输入信号 I 直接控制输出信号Q,由于不同的系统的 输出量Q与输入量 I 之间的关系各不相同,不可能找出一种简单通用的设计 方法。
图5-5 长延时电路
图5-6 长延时电路
6.自动往返的小车的控制程序 按下起动按钮SB2或SB3,要求小车在左、右限位开关之间不停地循环往返, 直到按下停车按钮SB1。
用分开的两个起保停电路来分别控制小车的右行和左行。 将Q0.0和Q0.1的常闭触点分别与对方的线圈串联,称为“互锁”。 通过“按钮联锁”,不按停车按钮就可以改变电机的旋转方向。 在PLC外部设置由KM1和KM2的辅助常闭触点组成的硬件互锁电路,以确 保不会出现因为两个接触器同时动作使三相电源相间短路的故障。 限位开关的常闭触点使小车在极限位置停止运行,限位开关的常开触点使 小车反向起动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五回PLC open®的【Safety FB】
上次的主题是“PLCopen的『Motion Control FB』”,为了容易理解「Motion Control FB」的便利性和使用方法,通过举出具体的事例详细介绍。
这第5回的内容,主要针对日益增长的对控制安全性的关注,有关PLCopen的“Safety Function Block (以下简称Safety FB)”说明。
安全保证功能的软件化(Safety Software)
近年来,安全保证的必要性逐步提高,主要涉及制造装置和医疗机器,电梯、铁路等的社会基础设施。
这些装置,在以往常常使用安全继电器等,由硬件搭建的安全电路,确保其安全性。
然而,随着过去十多年的技术创新与各公司推出符合IEC 61508国际安全规格的安全控制器,以及不断的降低成本,安全电路的软件化也日趋成熟。
还有,能结合PLC的(Programmable Logic Controller)软件语言,程序设计环境,网络环境的安全控制器也被商品化,对安全电路的软件化引入,门槛也变得越来越低。
安全FB 定义(Safety Function Block)
然而,虽说安全电路的软件化变得容易导入起来,但各制造商具有独自设计的Safety FB,独自地取得认证机关的安全认证。
因此,如果使用这些安全控制器,就需要学习各制造商的FB配置和程序设计方法。
还有,如果装置的安全规格认证方式不同,就需要设备的开发者自己向认证机关说明FB配置情况。
再者,制作的安全程序以独立的硬件为依存,软件化的好处也大打折扣。
为了解决这些课题,PLCopen制定了Safety FB规格标准。
PLCopen Safety FB,继承了IEC 61131-3标准的优点,具有程序的再利用性,POU 和任务的概念,同时,FB的接口配置和动作配置也被标准化。
还有,为进行配置制定和认证,欧洲的安全规格认证机关的技术委员会(Technical Committee)也参与了。
因此,由于使用采用了PLCopen Safety FB的安全控制器,将会显现以下效果。
●学习费用的降低
●程序再利用性的提高
●安全规格认证费用的降低
根据以上描述,如果结合IEC 61131-3的PLC同时使用,由于具有与其共通的程序设计环境,更能进一步降低Safety FB的学习费用。
PLCopen® Safety FB
为了满足PLCopen Safety FB的装置的安全规格认证费用的降低,需要制定各种各样的标准定义和配置。
主要涵盖的内容有:安全数据类型(Safe Data Types)和使用级别(User Levels)。
●安全数据类型(Safe Data Types)
为了使用与安全有关的数据,并区别IEC 61131-3定义的BOOL和INT等的数据类型,追加定义SAFEBOOL和SAFEINT等作为安全数据类型。
●使用级别(User Levels)
根据安全程序的配置内容定义了3个使用级别(表1)。
基本级别,在使用的数据类型和机能上有一定限制,设计的自由度低,但安全规格认证也较为容易。
另一方面,系统级别,支持像C语言那样的高级编程语言,不过为了满足安全规格IEC 61508的认证要求,设计会相当困难。
安全FB的事例和程序设计例子
关于安全FB介绍,用具有代表性的PLCopen Safety FB的SF_EmergencyStop为例来进行说明。
每个安全FB都定义了适用的安全规格(表2)。
据此,能判断装置需要的安全规格。
哪些是安全数据类型。
还有,根据状态时序图表严格定义动作配置,即使使用不同制造商的产品也不会产生差异。
图1 SF_EmergencyStop接口配置
关于实际使用的安全控制器和SF_EmergencyStop的程序例子,这里以欧姆龙的「安全控制单元NX系列」和「机器自动控制软件Sysmac Studio」为例来介绍。
像图2那样,由于NX系列用黄色带表示安全数据类型的变量,使得程序的易读性更加提高。
据此,在接受装置的安全规格审查时,可提高效率,缩小关联安全确认的时间。
图2 使用SF_EmergencyStop的程序设计例子(Sysmac Studio画面)
汇总
此次,以PLCopen Safety FB制定的背景和效果为中心,结合PLCopen Safety FB 的目标,阐述为程序再利用性的提高和学习费用的降低,PLCopen Safety FB带来的好处。
同时,与IEC 61131-3共通的配置,也降低了装置的安全规格认证费用。
这不仅仅在构筑大规模的安全程序时能体现好处,在将现有的安全继电器硬件电路改造为安全功能软件化过程中也能显现非常好的优势。
还有,2013年末,面向PLCopen配置的被改良的FB和被追加制定的FB也已推出,今后,还会不断充实。
在全球对安全确保的必要性愈发重视的今天,希望此次说明能为装置的安全对策起到些许帮助。