V15-G-15M-PUR_连接线
西门子伺服电机_图文

5
1对于额定4500RPM ,这些值对应于n=3500rpm ;对于额定6000RPM ,这些值对应于n=4500rpm ;对于额定4500RPM ,这些值对应于n=4000rpm ;对于额定6000RPM ,这些值对应于n=5500rpm ;
3在空气温度为+40°C的情况下连续运转时,功率电缆的载流能力符合IEC 60 04-1规定的C类布线方式要求,设计规格为I0(100K,PVC/PUR绝
带有滑键和键槽N无A带有滑键和键槽N有B带有滑键和键槽R无D带有滑键和键槽R有E光轴N无G光轴N有
H光轴R无K光轴R有L
振动强度等级:防护等级:等级A IP64 0等级A IP65 1等级A IP67等级R IP64 3等级R IP65 4等级R
8轴高为0的电机没有DRIVE-CLiQ接口,编码器必须通过SMC传感器模块来连接。
4
注意:1FK7 30V系列的伺服电机,目前主要用于与1AC 30V Sinamics S1 0单轴驱动系统连接。
1 3 4 5 6 7 8 9 10 11 1 13 14 15 16
订货号下标:
1
F
K
7 ■ ■ ■ - ■ ■ ■ 1 - 1 ■ ■ ■编码器系统,用于没有DRIVE-CLIQ接口的电机:增量式编码器sin/cos 1V PP , 048S/R
IP64
(可选IP65,IP67
自然冷却8~13 0. ~15.5 1.4-61强制冷却63~80 3.8~10.81 ~33水冷
63~100
3.1~3
4.
10~109
1FS6防爆永磁同步电机,符合Eex DE II CT3防爆标准IP64(可选IP65自然冷却71~13 1. ~1 .4 1.9~68
海德汉LIC4000系列光栅尺

Related documents 敞开式直线光栅尺样本 EnDat技术信息
681879 · 00 · B · 02 · 11/2010 · PDF
安装 绝对位置值 订购标识 分辨率 计算时间 tcal 电源 功耗 1) (最大) 电流消耗(典型值) 电气连接* 运动速度 振动 55至2000 Hz 冲击 11 ms 工作温度 防护等级 重量 扫描头: 光栅尺带: 零部件: 光栅尺尺座: 连接电缆: 连接器:
钢带光栅尺穿入在铝壳中并预紧 EnDat 2.2 EnDat 22 0.001 µm (1 nm) ≤ 6 µs DC 3.6至14 V 14 V时: ≤ 1000 mW 3.6 V时: ≤ 800 mW 5 V时: 110 mA 1 m或3 m电缆,带8针的M12接头(针式) ≤ 480 m/min ≤ 200 m/s² (EN 60068-2-6) ≤ 500 m/s² (EN 60068-2-27) 0°C至50°C IP 40 16 g(无连接电缆) 31 g/m 80 g + n 2) × 27 g 187 g/m 20 g/m 32 g
METALLUR绝对位置编码轨的钢带光栅尺 αtherm ≈ 10 x 10 -6 K -1 ±15 µm或±5 μm,在信号处理电路中进行线性长度误差补偿后 70 | 120 | 170 | 220 | 270 | 320 | 370 | 420 | 520 | 620 | 720 | 820 | 920 | 1020 钢带光栅尺用PRECIMET粘贴在安装面中 EnDat 2.2 EnDat 22 0.001 µm (1 nm) ≤ 6 µs DC 3.6至14 V 14 V时: ≤ 1000 mW 3.6 V时: ≤ 800 mW 5 V时: 110 mA 1 m或3 m电缆,带8针的M12接头(针式) ≤ 480 m/min ≤ 200 m/s² (EN 60068-2-6) ≤ 500 m/s² (EN 60068-2-27) 0°C至50°C IP 40 16 g(无连接电缆) 31 g/m 20 g/m 32 g
图尔克 TBEN-L5-16DXP 以太网多协议 I O 模块 用户手册说明书
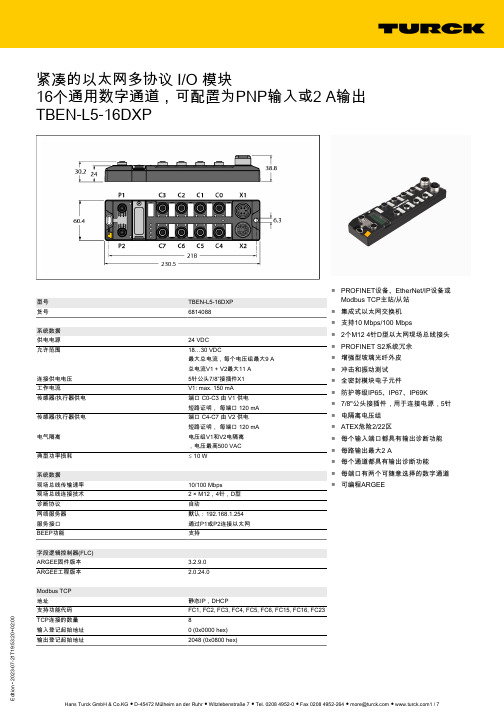
3:20+02:00紧凑的以太网多协议 I/O 模块16个通用数字通道,可配置为PNP输入或2 A输出TBEN-L5-16DXP型号TBEN-L5-16DXP 货号6814088系统数据供电电源24 VDC 允许范围18…30 VDC最大总电流,每个电压组最大9 A 总电流V1 + V2最大11 A连接供电电压5针公头7/8”接插件X1工作电流V1: max. 150 mA 传感器/执行器供电端口 C0-C3 由 V1 供电短路证明, 每端口 120 mA 传感器/执行器供电端口 C4-C7 由 V2 供电短路证明, 每端口 120 mA 电气隔离电压组V1和V2电隔离,电压最高500 VAC 典型功率损耗ð 10 W系统数据现场总线传输速率10/100 Mbps 现场总线连接技术2 × M12,4针,D型诊断协议自动网络服务器默认:192.168.1.254服务接口通过P1或P2连接以太网BEEP功能支持字段逻辑控制器(FLC)ARGEE固件版本 3.2.9.0ARGEE工程版本 2.0.24.0Modbus TCP 地址静态IP,DHCP支持功能代码FC1, FC2, FC3, FC4, FC5, FC6, FC15, FC16, FC23TCP连接的数量8输入登记起始地址0 (0x0000 hex)输出登记起始地址2048 (0x0800 hex)■PROFINET设备、EtherNet/IP设备或Modbus TCP主站/从站■集成式以太网交换机■支持10 Mbps/100 Mbps■2个M12 4针D型以太网现场总线接头■PROFINET S2系统冗余■增强型玻璃光纤外皮■冲击和振动测试■全密封模块电子元件■防护等级IP65、IP67、IP69K ■7/8"公头接插件,用于连接电源,5针■电隔离电压组■ATEX危险2/22区■每个输入端口都具有输出诊断功能■每路输出最大2 A■每个通道都具有输出诊断功能■每端口有两个可随意选择的数字通道■可编程ARGEE3:20+02:00EtherNet/IP 地址符合EtherNet/IP规范快插(QC)< 150 ms 设备级环(DLR)支持3级连接 (TCP)31级连接 (TCP)10输入配置实例101输出配置实例102配置配置实例106PROFINET 版本 2.35地址DCP 一致性分类 B (RT)最小周期时间 1 ms 快速启动(FSU)< 150 ms诊断依据PROFINET报警处理拓扑检测支持自动分配地址支持介质冗余协议(MRP)支持系统冗余S2网络负载等级3数字量输入通道数16Connectivity inputs M12,5针输入类型PNP 输入诊断类型组诊断开关阈值EN 61131-2 分类3, PNP 低电平信号电压< 5 V 高电平信号电压> 11 V 低电平信号电流< 1.5 mA 高电平信号电流> 2 mA 输入延迟 2.5 ms电气隔离与现场总线之间电隔离最高可耐500 VDC的电压数字量输出通道数16Connectivity outputs M12,5针输出类型PNP 诊断通道诊断输出电压24 VDC,来自电势组通道输出电流 2.0 A, 短路保护, 每端口最大 2.0 A 继电器输出 1.3 ms负载类型EN 60947-5-1:DC-13短路保护是电气隔离与现场总线之间电隔离最高可耐500 VDC的电压3:20+02:00标准 / 指令合规性振动测试符合EN 60068-2-6标准加速度最大20 g冲击测试符合 EN 60068-2-27认证滑落和翻倒符合EN 60068-2-31/EN 60068-2-32电磁兼容性符合EN 61131-2标准认证和证书CE,FCC,FM I类,2区,抗紫外线符合DIN EN ISO 4892-2A (2013)标准UL认证cULus LISTED 21 W2, Encl.Type 1 IND.CONT.EQ.有关ATEX/IECEx的注释必须遵守包含有关在爆炸危险2区和22区中使用的信息的快速入门指南。
V15-G-15M-PUR-V15-G_连接线

Pollution degree Mechanical specifications Contact elements
3 spring-loaded contact socket
工业传感器》产品连接器》电源线》分线器》传感器接插件
Pin diameter Degree of protection Material
IP67 / IP68 / IP69k
CuSn / Au Au TPU, black PUR Diecast zinc Diecast zinc PP fine-strand, flexible ∅4.8 mm > 10 x cable diameter, moving grey
工业传感器》产品连接器》电源线》分线器》传感器接插件
•
Gold plated contacts
•
Degree of protection IP67 / IP68 / IP69K
•
Halogen-free
•
Suitable for 2-, 3- and 4-wire technology
参数表节选:的技术参数 V15-G-15M-PUR-V15-G
产品阐述
Cores
5 x 0.34 mm2
Conductor construction
19 x 0.15 mm ∅
Length
15 m
Flammability
Contact carrier
94 V-2
Housing
94 V-2
翔京联合传感器有限公司技术资料
工业传感器》产品连接器》电源线》分线器》传感器接插件
翔京联合传感器有限公司技术资料
Connection cable V15-G-15M-PUR-V15-G
调节阀计算与选型
在过程控制系统中,调节阀通过接收控制系统指令来调节阀门的开度,从而控制介质的流量、压力、流速等。
在选择调节阀时,应根据介质参数(压力、温度)、流量、介质特性和调节阀的作用,并了解调节阀的基本结构、特点,才能正确选择调节阀。
1 调节阀的组成1.1 阀体组件阀体组件需具有以下要素:结构型式、公称通径、公称压力、与管道连接型式、适用温度范围、阀体和内件的材质、阀座直径或额定流通系数、流量特性、阀座泄漏等级等。
1.2 执行机构执行机构通常分为气动和电动。
气动执行机构又分薄膜式和气缸活塞式。
气动薄膜式执行机构是直接与阀杆连接的执行机构。
气源压力一般为0.14~0.4MPa。
气缸活塞式分为横式和竖式2种,每种又分为弹簧式(单作用)和无弹簧式(双作用)2种;该执行机构主要用于角行程输出推力大,定位精度要求高的场合,气源压力最高达0.7MPa电动执行机构分为直行程和角行程执行机构。
根据允许压差所需的推力而确定的某一型号执行机构的号数以及弹簧范围和供气压力、行程、依据阀在失气时的位置而确定作用形式。
1.3 调节阀附件调节阀附件主要有阀门定位器、空气过滤减压器、位置信号发生器(阀位传送器、行程开关)、手轮机构、电磁换向气阀、加速器以及气源保护装置等等,视系统需要确定。
2 调节阀的类型根据执行机构,调节阀分为电动调节阀、气动调节阀。
根据阀体结构,调节阀分为直通单座/双座调节阀、套筒型调节阀、角型调节阀、蝶阀、偏心旋转调节阀、迷宫式调节阀、二位(on/off)调节阀、多级调节阀等。
直通单座调节阀:阀内有1个阀芯和1个阀座,按其阀芯形状可分为调节型分关断型。
阀座泄漏量小,可达IV级(额定流量×10-4),适用于压差小,口径小、要求泄漏量小或切断场合,如常闭调节阀。
直通双座调节阀:阀内有2个阀芯和2个阀座。
不平衡力小,允许压差较单座阀大,流通能力大;但流路复杂,阀座泄漏量大(III级,额定流量×10-3),适用于压差较大、流量大、对泄漏量要求不高、正常运行时经常调节的场合。
伊玛产品类别

18~36 VDC
PNP NO/NC,NPN NO/NC
4~20 mA,0~10 V
可
PA1108
智慧型
7 LED
内螺纹
G 1/4
400 bar
四线
18~36 VDC
PNP NO/NC,NPN NO/NC
4~20 mA,0~10 V
可
PA1109
智慧型
7 LED
内螺纹
G 1/4
2 bar
四线
18~36 VDC
200
60
M12
接插件
N
Y
N
IP67
否
IA0031
齐平
brass
10~36VDC
1
两线
NO
DC PNP/NPN
200
60
M12
接插件
N
Y
N
IP67
否
IA0032
齐平
brass
10~36VDC
1
两线
NC
DC PNP/NPN
200
60
M12
接插件
N
Y
N
IP67
否
IA0033
非齐平
brass
10~36VDC
可
TA1099
智慧型
7 LED
内螺纹
M18 X 1.5
-40~150°C
四线
20~30 VDC
PNP NO/NC,NPN NO/NC
4~20 mA,0~10 V
可
产品类别
压力变送器(模拟量输出)
压力变送器(开关量输出)
订货号
功能
显示
牙口形式
高效液相色谱—串联质谱法测定猪可食性组织中烯丙孕素残留

基金项目:安徽省高等学校科学研究项目(编号:K J 2021A 0593)作者简介:倪香艳,女,北京市农产品质量安全中心兽医师,硕士.通信作者:孙志文(1976 ),男,北京市农产品质量安全中心高级兽医师,硕士.E Gm a i :S u n z w 673@163.c o m 收稿日期:2022G06G21㊀㊀改回日期:2022G10G28D O I :10.13652/j .s p jx .1003.5788.2022.60082[文章编号]1003G5788(2023)02G0045G05高效液相色谱 串联质谱法测定猪可食性组织中烯丙孕素残留D e t e r m i n a t i o no f a l t r e n o g e s t r e s i d u e i n p i g e d i b l e t i s s u eb y ah i g h p e r f o r m a n c e l i q u i dc h r o m a t o g r a p h y Gt a n d e m m a s s s p e c t r o m e t r y me t h o d 倪香艳1N IX i a n g Gy a n 1㊀孙念霞2S U N N i a n Gx i a 2㊀于寒冰1Y U H a n Gb i n g 1㊀方㊀芳1F A N GF a n g 1㊀孙志文1SU N Z h i Gw e n 1(1.北京市农产品质量安全中心,北京㊀102629;2.安徽中医药大学,安徽合肥㊀230012)(1.B e i j i n g A g r i c u l t u r a lP r o d u c tQ u a l i t y a n dS a f e t y C e n t e r ,B e i j i n g 102629,C h i n a ;2.A n h u iU n i v e r s i t y o f C h i n e s eM e d i c i n e ,H e fe i ,A n h u i 230012,C h i n a )摘要:目的:测定猪可食性组织(肌肉㊁肝脏㊁脂肪)中烯丙孕素残留.方法:试样经βG葡萄糖醛酸酶/芳基硫酸酯酶酶解,乙腈提取,P R i M E H L B 固相萃取柱净化.以乙腈 0.1%甲酸水溶液作为流动相,经W a t e r sU P L CB E HC 18反相色谱柱分离后于电喷雾正离子模式下检测,基质匹配外标法定量.结果:烯丙孕素在1~50μg /L 的质量浓度范围内线性良好,线性相关系数R 2>0.99;该方法在猪肌肉㊁肝脏㊁脂肪组织中检测限为0.5μg /k g ,定量限为1.0μg /k g .在3个添加水平下(1.0,2.0,10.0μg /k g ),平均回收率为60.9%~89.8%,日内变异系数为0.8%~7.1%,日间变异系数为2.5%~11.6%.结论:该方法操作简便,适用于猪可食性组织中烯丙孕素残留的定性与定量分析.关键词:高效液相色谱 串联质谱法;猪肌肉;猪肝脏;猪脂肪;烯丙孕素;残留检测A b s t r a c t :O b je c t i v e :T o d e t e r m i n a t e t h e r e s i d u e s of a l t r e n og e s t i n p o r c i n e e d i b l e t i s s u e s (m u s c l e ,l i v e r ,f a t ),ahi g h p e r f o r m a n c e l i q u i d c h r o m a t o g r a p h y Gt a n d e m m a s s s p e c t r o m e t r y (L C GM S /M S )m e t h o dw a s e s t a b l i s h e d .M e t h o d s :T h e s a m p l e sw e r eh y d r o l y z e d w i t h βGg l u c u r o n i d a s e /a r y l s u l f a s e ,e x t r a c t e d b y ac e t o n i t r i l e (A C N ),p u r i f i e db y PR i M E H L Bs o l i d p h a s e e x t r a c t i o nc o l u m n .L C s e p a r a t i o n w a s p e r f o r m e d w i t h W a t e r s U P L C B E H C 18r e v e r s e d Gp h a s e c h r o m a t o g r a p h y wi t ha l i n e a r g r a d i e n te l u t i o no f a c e t o n i t r i l e (A C N )G0.1%f o r m i c a c i d (F A )a s t h em o b i l e p h a s e .T h e s a m p l e sw e r e d e t e c t e db y e l e c t r o s p r a y i n p o s i t i v e i o n m o d e .R e s u l t s :T h e p r e g n a n c i n i n t i s s u e sw e r e q u a n t i f i e d i n t h e r a n ge of 1~50μg /L w i th g o o dli n e a r i t y a n d h i gh l i n e a r c o r r e l a t i o n c o e f f i c i e n t (R 2>0.99).T h e l i m i t o f d e t e c t i o n (L O D ,S /N =3)a n d t h e l i m i t o f q u a n t i f i c a t i o n (L O Q ,S /N =10)w e r e a s l o wa s 0.5μg /k g a n d 1.0μg /k g s e p a r a t e l y .U n d e rt h r e e d i f f e r e n t c o n c e n t r a t i o n s (1.0,2.0,10.0μg /k g ),t h ea v e r a g er e c o v e r i e s w e r e 60.9%~89.8%,t h e i n t r a Gd a y co e f f i c i e n to fv a r i a t i o n w a s 0.8%~7.1%,a n dt h ei n t e r Gd a y c o e f f i c i e n to fv a r i a t i o n w a s 2.5%~11.6%.C o n c l u s i o n :T h em e t h o d i s s i m pl e a n d s u i t a b l e f o r t h e q u a l i t a t i v e a n d q u a n t i t a t i v ea n a l y s i so f a l t r e n o g e s t r e s i d u e i n po r c i n e e d i b l e t i s s u e s .K e yw o r d s :h i g h p e r f o r m a n c e l i q u i d c h r o m a t o g r a p h y Gt a n d e m m a s s s p e c t r o m e t r y ;p i g m u s c l e ;p i g l i v e r ;p i g f a t ;a l t r e n o g e s t ;r e s i d u e d e t e c t i o n烯丙孕素是一种人工合成的甾类促孕孕酮[1-2].临床上欧盟和美国已批准将烯丙孕素用于对猪和马的同期发情的调控[3],其作用机理是通过与黄体酮的受体结合,抑制机体内促性腺相关激素的生成[4],降低其在血浆中的浓度,进而调控母畜发情周期[5].非洲猪瘟背景下,种猪的繁殖性能是育种成功的关键所在,作为人工合成的甾类促孕孕酮的烯丙孕素在中国母猪批次化生产过程中,也成为应用最为广泛的外源性孕激素之一[5-6].但动物试验表明孕激素会增加死胎率,且有致畸作用[7],人体长期摄入烯丙孕素药物超标的动物产品会破坏机体内激素平衡,引起癌变,还会导致婴幼儿身体发育异常[8-9].为避免烯丙孕素在动物可食性组织中的残留,农业农村部规定烯丙孕素在猪肌肉㊁肝脏㊁脂肪中的最高残留限量(试行)分别为1,2,4μg /k g.目前有关孕激素等激素类药物残留的检测方法有液54F O O D &MA C H I N E R Y 第39卷第2期总第256期|2023年2月|Copyright ©博看网. All Rights Reserved.相色谱法[9-10]㊁气相色谱 串联质谱法[11]㊁液相色谱 串联质谱法[12-13]等.液相色谱法的抗干扰能力较差㊁灵敏度低[10];气相色谱法样品需衍生化,不适用于激素类等挥发性较低的药物检测[11];高效液相色谱 串联质谱方法具有特异性强㊁灵敏度高等优点[13],已成为兽药残留痕量药物检测的发展趋势.目前国内外有关烯丙孕素药物的研究主要集中于其对母猪发情性能的影响机理等方面[3],对其在动物体内的残留检测关注度较少且仅限于肌肉㊁饲料㊁肝脏等单一组织[3,14],未见有肌肉㊁肝脏㊁脂肪等多个靶组织同时检测的多残留分析方法;部分检测方法存在前处理过程中未进行酶解导致定量不准确㊁提取液未净化[14]导致仪器污染等问题.研究拟建立一种猪肌肉㊁肝脏㊁脂肪中烯丙孕素药物残留检测的高效液相色谱 串联质谱方法,采用多种水解酶进行酶解㊁乙腈提取猪组织中残留的烯丙孕素,旨在为猪可食性组织中烯丙孕素残留分析检测提供依据.1㊀材料与方法1.1㊀材料与仪器1.1.1㊀材料与试剂烯丙孕素标准品:纯度ȡ98.0%,德国D r.E h r e n s t o r f e r公司;βG葡萄糖醛苷酸酶/芳基硫酸酯酶:>10000U/m L,美国S i g m a公司;乙腈㊁甲酸:质谱级,德国M e r c k公司;P R i M E H L B固相萃取柱:200m g,6m L,美国W a t e r s公司;乙酸钠㊁氯化钠:分析纯,北京化工厂.1.1.2㊀主要仪器设备高效液相色谱 串联质谱仪:W a t e r sX e v oT QGS型,配备M a s s L y n xV4.1软件处理系统,美国W a t e r s公司;电子天平:B S A6202S型,上海诺萱科学仪器有限公司;高速冷冻离心机:C R30N X型,德国E p p e n d o r f公司;氮吹仪:T T LGD C I I型,上海标卓科技仪器有限公司;旋涡振荡器:V o r t e x3000E l i t e型,维根技术北京有限公司.1.2㊀方法1.2.1㊀样品前处理㊀称取匀浆后猪肌肉㊁肝脏㊁脂肪样品(2.00ʃ0.01)g,依次加入8m L乙酸钠缓冲溶液(0.2m o l/L,p H5.2)㊁20μLβG葡萄糖醛苷酸酶/芳基硫酸酯酶,涡旋混匀2m i n,55ħ振荡酶解2h.分别加入3g 氯化钠㊁10m L乙腈溶液,涡旋混匀10m i n,8000r/m i n 离心5m i n.上清液于-20ħ冷冻除脂20m i n,冷冻后提取液于-4ħ㊁8000r/m i n离心5m i n,弃去脂肪层.取5m L提取液直接过P R i M E H L B固相萃取柱,洗脱液直接收集于离心管中,45ħ氮吹至干,加入0.5m L20%乙腈水溶液溶解,上清液过0.22μm滤膜,净化后复溶液供仪器检测分析.1.2.2㊀液相色谱条件㊀色谱柱为W a t e r sU P L CB E H C18柱(50mmˑ2.1mm),填料粒径1.7μm;流动相A为乙腈溶液,流动相B为0.1%甲酸水溶液,按表1进行梯度洗脱;流速0.3m L/m i n;上样体积10μL;柱温30ħ.表1㊀烯丙孕素高效液相色谱梯度洗脱条件T a b l e1㊀G r a d i e n te l u t i o nc o n d i t i o n so fa l t r e n o g e s tb yh i g h p e r f o r m a n c e l i q u i d c h r o m a t o g r a p h y时间/m i n流动相A/%流动相B/%0.050500.550502.080202.150503.050501.2.3㊀质谱条件㊀参照李建等[14]的方法.电喷雾正离子源;M R M质谱多反应监测信号采集方式;毛细管电离电压3.00k V;源温度150ħ;脱溶剂温度400ħ;锥孔气流速150L/h;脱溶剂气流速700L/h.1.2.4㊀标准曲线的制备㊀空白阴性样品按1.2.1处理得空白样品提取液,稀释标准品,得到系列基质匹配标准溶液,以待测药物浓度作为横坐标,对应的药物峰面积作为纵坐标绘制标准曲线.1.2.5㊀检测限和定量限㊀在空白阴性试验样品中添加待测药物,按1.2.1处理后进行分析.按照待测药物色谱峰信号响应的信噪比S/N>3确定检测限;S/N>10确定定量限.1.2.6㊀准确度和精密度㊀在空白阴性试验样品中添加待测药物,对试验方法开展方法学考察.空白样品中添加水平为1.0,2.0,10.0μg/k g药物,每个药物水平设5个重复,连续测定3d,根据检测结果计算待测药物的回收率㊁日内变异系数和日间变异系数等.1.2.7㊀数据处理㊀使用M a s s L y n xV4.1对化合物的定量离子进行数据处理得到样品溶液浓度数据,并使用定性离子进行辅助定性.2㊀结果与分析2.1㊀前处理条件优化2.1.1㊀提取条件㊀烯丙孕素药物多以与硫酸和葡萄糖醛酸结合形成结合型的轭合物形态存在[15].试验采用βG葡萄糖醛苷酸酶/芳基硫酸酯酶进行酶解,药物检测过程中将其结合态水解成游离形式的化合物进行测定.考虑到提取效率和安全等因素,选用乙腈作为前处理提取试剂.由图1可知,10,15m L乙腈对烯丙孕素提取的回收率接近且高于5m L乙腈的,因此采用10m L乙腈提取液对药64安全与检测S A F E T Y&I N S P E C T I O N总第256期|2023年2月|Copyright©博看网. All Rights Reserved.图1㊀乙腈提取体积对药物回收率的影响F i g u r e1㊀E f f e c t s o n s a m p l e r e c o v e r y o f a c e t o n i t r i l ee x t r a c t i o nv o l u m e物进行提取.2.1.2㊀净化方式㊀待测样品中的杂质主要有蛋白质㊁脂类物质和一些小分子的极性物质[16].蛋白质等大分子杂质㊁小分子极性物质等在有机溶剂提取药物过程中可以有效去除,脂类等大分子物质可以通过正己烷去除或者在低温冷冻下除脂.而烯丙孕素药物的极性较小,在正己烷中会有一定的溶解性[17],因此采用低温冷冻去除脂类,使提取液的净化效果能够满足要求[18].由图2可知,H L B㊁C18固相萃取柱需活化,过程较繁琐且对待测物质吸附强,药物损失较大;P R i M E H L B固相萃取柱处理样品方便㊁简单,不需要活化固相萃取柱,提取液直接流经固相萃取柱后进行浓缩㊁复溶即可检测,极大提升了样品前处理效率.2.2㊀色谱条件优化㊀激素类药物分离多采用C18反相色谱柱[19-20],研究选用柱长为50mm,柱内径为2.1mm,粒度为1.7μm的色谱柱时,色谱柱对待测组分与干扰杂质间的分离效果能满足检测要求.由图3可知,流动相采用乙腈-0.1%甲酸水进行梯度洗脱时,色谱峰型好,信号响应高,烯丙孕素能有效分离.2.3㊀质谱条件优化㊀试验表明,在负离子模式下直接进样进行测定,采集图2㊀净化方式对回收率的影响F i g u r e2㊀E f f e c t o n r e c o v e r y o f p u r i f i c a t i o nm e t h o dsa1㊁a2为子离子M RM色谱图;a3为总离子M R M色谱图图3㊀烯丙孕素标准溶液离子色谱图F i g u r e3㊀I o n c h r o m a t o g r a mo f a l t r e n o g e s t s t a n d a r d到的烯丙孕素母离子信号响应值较低;在正离子模式下直接进样进行测定,烯丙孕素母离子信号响应良好.故试验在酸性条件下进行,采用正离子模式电离检测待测药物.由表2可知,全扫描得到的准分子离子峰([M+H]+)为311.2.调节毛细管电压,使其丰度最大,进行二级质谱分析,优化毛细管电压㊁脱溶剂气流速及碰撞能量,进行子离子扫描,选择响应最高的两个离子碎片为待测药物定量离子和定性离子,最佳质谱参数条件:定量离子对311.2>227.2,锥孔电压22V,碰撞电压24V;定性离子对311.2>269.2,锥孔电压22V,碰撞电压18V.2.4㊀方法学考察2.4.1㊀基质效应㊀试验表明,烯丙孕素在猪可食用性组织中存在较强的基质抑制效应,故采用基质匹配标准溶液来消除基质效应.2.4.2㊀线性范围㊀由表2可知,烯丙孕素在1~50μg/L的质量浓度范围内线性良好,相关系数R2在0.99以上.2.4.3㊀检测方法灵敏度㊀由图4可知,在对应的保留时间内,空白试样中基质对待测药物无明显干扰.㊀㊀当猪可食性组织中烯丙孕素添加量为0.5,1.0μg/k g 时,信噪比>3,当烯丙孕素添加量为1.0μg/k g时,信噪比>10.因此,烯丙孕素检测限(L O D)为0.5μg/k g,定量限(L O Q)为1.0μg/k g.表2㊀不同基质烯丙孕素线性方程T a b l e2㊀L i n e a r e q u a t i o no f d i f f e r e n tm a t r i xa l t r e n o g e s t组织线性范围/(μg L-1)线性方程相关系数R2肌肉1~50Y=30132X+479670.9969肝脏1~50Y=28586X+321000.9926脂肪1~50Y=24354X+651030.990674|V o l.39,N o.2倪香艳等:高效液相色谱 串联质谱法测定猪可食性组织中烯丙孕素残留Copyright©博看网. All Rights Reserved.b 1㊁b 2为子离子M R M 色谱图;b 3为总离子MR M 色谱图图4㊀空白肝脏烯丙孕素离子色谱图F i g u r e 4㊀I o n c h r o m a t o g r a mo f a l t r e n o ge s t i nb l a n k l i v e r 2.4.4㊀检测方法准确度和精密度㊀选取阴性肌肉㊁肝脏㊁脂肪样品进行添加回收试验,以肝脏组织为例,烯丙孕素添加离子色谱图如图5所示,方法学考察该方法的准确度和精密度.由表3可知,3个添加水平下,平均回收率为68.9%~87.4%;日内变异系数为0.8%~7.1%,日间变异系数为2.5%~11.6%,方法回收率及精密度满足残留检测要求.3㊀结论试验建立了一种快速检测猪肌肉㊁肝脏㊁脂肪多种可食性组织中烯丙孕素药物残留检测的高效液相色谱 串联质谱方法.结果表明,试验方法的前处理过程快速准确,净化效果显著且对仪器无污染.该方法线性关系良好,灵敏度高,重现性好,适用于猪肌肉㊁肝脏㊁脂肪多种组织中烯丙孕素残留批量快速检测.但试验未对更多的样品中烯丙孕素残留量进行测定,今后可以进一步对各表3㊀烯丙孕素不同添加量猪可食性组织中的回收率和变异系数T a b l e 3㊀R e c o v e r y a n dv a r i a t i o n c o e f f i c i e n t o f a l t r e n o g e s t i n p i g ed i b le t i s s u ew i t h d if f e r e n t l e v e l s o f a l l ge s t r e l i n (n =5)添加水平/(μg k g -1)肌肉日内回收率/%变异系数/%日间回收率/%变异系数/%肝脏日内回收率/%变异系数/%日间回收率/%变异系数/%脂肪日内回收率/%变异系数/%日间回收率/%变异系数/%167.36.270.26.371.45.569.45.268.17.168.95.775.35.367.73.573.14.268.14.069.25.765.43.3279.33.479.55.577.12.677.52.578.52.275.79.774.33.079.00.881.86.873.52.176.42.666.80.91089.70.987.42.886.10.880.011.683.21.678.45.587.52.284.63.180.52.385.02.069.32.474.73.4c 1㊁c 2㊁d 1㊁d 2㊁e 1㊁e 2为子离子M R M 色谱图;c 3㊁d 3㊁e 3为总离子MR 色谱图图5㊀烯丙孕素肝脏添加离子色谱图F i g u r e 5㊀I o n c h r o m a t o g r a mo f a l t r e n o g e s t cw i t h q u a l i t y c o n t r o l s a m pl e 84安全与检测S A F E T Y &I N S P E C T I O N 总第256期|2023年2月|Copyright ©博看网. All Rights Reserved.个环节中样品进行药物含量测定和分析,有利于今后开展畜禽产品中孕激素的风险评估数据积累.参考文献[1]夏良友,李士洋,李宇琛,等.烯丙孕素口服液对靶动物猪的安全性研究[J].中国兽医杂志,2017,51(10):46G52.XIA L Y,LI S Y,LI Y C,et al.Study on the safety of altrenogest oral solution to sows[J].Chinese Journal of Veterinary Drug,2017, 51(10):46G52.[2]ZIECIK A J,KLOS J,PRZYGRODZKA E,et al.Aberrant effects ofaltrenogest and exposure to exogenous gonadotropins on follicular cysts appearance in gilts[J].Theriogenology,2017,89(2):250G254.[3]杨挺,付岩,吴银良.QuEChERSG液相色谱串联质谱法测定猪肝中烯丙孕素残留量[J].食品安全质量检测学报,2018,9(9): 2141G2146.YANG T,FU Y,WU L Y.Determination of altrenogest residues in swine liver by QuEChERSGliquid chromatographyGtandem mass spectrometry[J].Journal of Food Safety and Quality,2018,9(9): 2141G2146.[4]VAN LEEUWEN J J J,MARTENS M R T M,JOURQUIN J,et al.V ariation in LH pulsatility during24h after a postweaning altrenogest treatment in relation to follicle development in primiparous sows[J]. Animal Reproduction Science,2011,126(6):101G107.[5]PENG C F,CHEN Y W,CHEN W,et al.Development of a sensitiveheterologous ELISA method for analysis of acetylgestagen residues in animal fat[J].Food Chemistry,2008,109(3):647G653.[6]WILLMANN C,BUDIK S,WALTER I,et al.Influences oftreatment of early pregnant mares with the progestin altrenogest on embryonic development and gene expression in the endometrium and conceptus[J].Theriogenology,2011,76(7):61G73.[7]ZHONG W,BAO S L,XIAO Y W,et al.Effects of altrenogest on reproductive performance of gilts and sows:A metaGanalysis[J]. Animal Reproduction Science,2018,197(10):10G21.[8]张彩云,赵兴鑫,东贤,等.浅谈兽药残留对人体的危害[J].今日畜牧兽医,2021,37(11):1G9.ZHANG C Y,ZHAO X X,DONG X,et al.Discussion on the harm of veterinary drug residue to human body[J].Today Animal Husbandry and Veterinary Medicine,2021,37(11):1G9. [9]李涛,杨潇,孙桂芳,等.QuEChERSGUPLCGQ/Orbitrap MS法快速测定草鱼中14种糖皮质激素类药物残留[J].食品与机械, 2019,35(12):100G104.LI T,Y ANG X,SUN G F,et al.Rapid determination of14 glucocorticoids in grass carp using QuEChERS coupled with UPLCGQ/ Orbitrap MS[J].Food&Machinery,2019,35(12):100G104. [10]韩智,龚丽,王会霞,等.UPLCGMS/MS同时测定保健食品中洛伐他汀及其类似物[J].食品与机械,2019,35(3):58G60. HAN Z,GONG L,WANG H X,et al.Simultaneous UPLCGMS/MS analysis of lovastatin and its analogue for functional foods[J]. Food&Machinery,2019,35(3):58G60.[11]LOZANOA A,HERNANDOB M D,UCLÉS S,et al.Identificationand measurement of veterinary drug residues in beehive products [J].Food Chem,2019,274(15):61G70.[12]IMPENS S,COURTHEYN D,WASCH K D,et al.Faster analysisof anabolic steroids in kidney fat by downscaling the sample size and using gas chromatographyGtandem mass spectrometry[J]. Analytica Chimica Acta,2003,483(1):269G280.[13]MORTENSEN S K,PEDERSEN M.Confirmatory analysis of acetylgestagens in plasma using liquid chromatographyGtandem mass spectrometry[J].Analytica Chimica Actal,2007,586(1/2):217G222.[14]李建,倪香艳,孙志文,等.超高效液相色谱 串联质谱法检测猪肌肉组织中烯丙孕素残留[J].分析仪器,2018(4):57G62.LI J,NI X Y,SUN Z W,et al.Determination of altrenogest in pork muscle tissue by ultraGhigh performance liquid chromatographyGtandem mass spectrometry[J].Analytical Instrumentation,2018(4):57G62.[15]LOHMUS M,KENDER T.Determination of gestagens in kidneyfat by liquid chromatography tandem mass spectrometry[J]. Journal of Aoac International,2007,586(1/2):233G238.[16]孙利东,许秀丽,袁飞,等.高效液相色谱 串联质谱法测定牛奶和鸡肉中4种激素本底值[J].食品科学,2017,38(22): 291G297.SUN L D,XU X L,YUAN F,et al.High performance liquid chromatographyGtandem mass spectrometry method forsimultaneous determination of background values of4hormonesin milk and chicken[J].Food Science,2017,38(22):291G297.[17]方秋华,黄显会,郭春娜,等.高效液相色谱 串联质谱法检测羊奶中乙酰孕激素多残留研究[J].分析测试学报,2018,31 (10):1314G1318.FANG Q H,HUANG X H,GUO C N,et al.Determination ofacetylgestagens in ovine milk by high performance liquid chromatographyGtandem mass spectrometry[J].Journal of Instrumental Analysis,2012,31(10):1314G1318.[18]SEO J,KIM H Y,CHUNG B C,et al.Simultaneous determinationof anabolic steroids and synthetic hormones in meat by freezingGlipid filtration,solidGphase extraction and gas chromatographyGmass spectrometry[J].Journal of Chromatography A,2005,1067 (1/2):303G309.[19]张念英,禚欢欢,郭冰,等.畜禽肉及鸡蛋等动物源性食品中44种多兽药残留检测超高效液相色谱 串联质谱法[J].农产品加工,2018,12(23):57G59.ZHANG N Y,ZHUO H H,GUO B,et al.Simultaneousdetermination of44veterinary drug residues of in animal products such as livestock and poultry meat and eggs ultraGperformance liquid chromatographyGtandem mass spectrometry[J].Farm Products Processing,2018,12(23):57G59.[20]怀文辉,李建,倪香艳,等.液相色谱 串联质谱法检测猪肉中20种违禁药物残留的研究[J].中国兽药杂志,2018,52(11):59G67. HUA W H,LI J,NI X Y,et al.MultiGclass residue analysis of20 illicit drugs in pork by high performance liquid chromatographyGtandem mass spectrometry[J].Chinese Journal of Veterinary Drug, 2018,52(11):59G67.94|V o l.39,N o.2倪香艳等:高效液相色谱 串联质谱法测定猪可食性组织中烯丙孕素残留Copyright©博看网. All Rights Reserved.。
数据结构与算法_桂林电子科技大学中国大学mooc课后章节答案期末考试题库2023年

数据结构与算法_桂林电子科技大学中国大学mooc课后章节答案期末考试题库2023年1.下面哪种数据结构不是线性结构()参考答案:二叉树2.串S=”myself“,其子串的数目是()参考答案:223.设目标串为‘abccdcdccbaa',模式串为'cdcc',则第()次匹配成功。
参考答案:64.串S='aaab',其next数组为()参考答案:-1 0 1 25.KMP算法相对于BF算法的优点是时间效率高参考答案:正确6.串是一种数据对象和操作都特殊的线性表参考答案:正确7.下面哪个()可能是执行一趟快速排序能够得到的序列参考答案:[41,12,34,45,27] 55 [72,63]8.设主串t的长度为n,模式串p的长度为m,则BF算法的时间复杂度为O(n+m)参考答案:错误9.从一个长度为n的顺序表中删除第i个元素(0 ≤ i≤ n-1)时,需向前移动的元素的个数是()参考答案:n-i-110.对线性表进行二分查找时,要求线性表必须()参考答案:以顺序方式存储,且结点按关键字有序排序11.某线性表中最常用的操作是在最后一个元素之后插入一个元素和删除第一个元素,则采用()存储方式最节省运算时间。
参考答案:仅有尾指针的单循环链表12.最小不平衡子树是指离插入结点最近,且包含不平衡因子结点的子树参考答案:正确13.在单链表中,存储每个结点需有两个域,一个是数据域,另一个是指针域,它指向该结点的( )参考答案:直接后继14.从一个具有n个节点的单链表中查找其值等于x结点时,在查找成功的情况下,需平均比较()个结点参考答案:n/215.对以下单循环链表分别执行下列程序段,说明执行结果中,各个结点的数据域分别是()p = tail→link→link; p→info = tail→info;【图片】参考答案:8,3,6,816.对以下单链表执行如下程序段,说明执行结果中,各个结点的数据域分别是()void fun (Linklist H) //H是带有头结点的单链表{ PNode p,q; p=H->link;H->link=NULL; while (p) { q=p; p=p->link; q->link=H->link; H->link=q; }}【图片】参考答案:8,6,4,217.根据教科书中线性表的实现方法,线性表中的元素必须是()参考答案:相同类型18.若线性表中最常用的操作是存取第i个元素及其前驱和后继元素的值,为了节省时间应采用的存储方式()参考答案:顺序表19.若已知一个栈的入栈序列是1,2,3,…,n,其输出序列为p1,p2,p3,…,pn,若p1=n,则pi为()参考答案:n-i+120.循环队列用数组A[0,m-1]存放其元素值,已知其头尾指针分别是front和rear,则当前队列中的元素个数是()参考答案:(rear-front+m)%m21.已知其头尾指针分别是front和rear,判定一个循环队列QU(最多元素为m)为空的条件是()参考答案:QU—>front= =QU—>rear22.一个队列的入列序列是1,2,3,4,则队列的输出序列是()参考答案:1,2,3,423.已知其头尾指针分别是front和rear,判定一个循环队列QU(最多元素为m)为满的条件是()参考答案:QU—>front= =(QU—>rear+1)%m24.在计算机内实现递归算法时所需的辅助数据结构是( )参考答案:栈25.设循环队列的元素存放在一维数组Q[0‥30]中,队列非空时,front指示队头元素的前一个位置,rear指示队尾元素。
电缆接插件选型手册

弯角母插头
V3-WM-2M-PVC V3-WM-3M-PVC V3-WM-5M-PVC V3-WM-10M-PVC V31-WM-2M-PVC V31-WM-5M-PVC V31-WM-10M-PVC
4
10 m
4
2m
5
5m
5
10 m
5
M12 公的接插件 M12 MALE CORDSETS
直形母插头
V11-G-2M-PVC V11-G-3M-PVC V11-G-5M-PVC V11-G-10M-PVC V1-G-2M-PVC V1-G-3M-PVC V1-G-5M-PVC V1-G-10M-PVC V15-G-2M-PVC V15-G-5M-PVC V15-G-10M-PVC
* 超过 80 °C 时必须考虑机械强度降低,电缆可移动应用最低至–5 °C.
M8样式 M8 DESIGN
直形母插头
弯角母插头
直形公插头
弯角公插头
M12样式 M12 DESIGN
直形母插头
弯角母插头
直形公插头
弯角公插头
M12 样式
4A 24 V DC 300 V DC < 5 mOhm –25 °C ... 100°C* TPU and CuSn/Au 3 IP67 / IP68 / IP69k 多股线,柔性的 (19 mm x 0.15 mm) 无卤素,防火符合 VDE 0472 part 804
PUR电缆 PUR CABLE
我们的PUR电缆有一个结实的PUR外壳可抵御高强度的机械负 荷。 绝缘层采用无卤素的polypropylen(PP)。 比起绝缘层采用 PUR,外壳采用PUR的电缆更容易剥线,但仍然是无卤素的。
Pepperl+Fuchs SLCS60系列安全光栅说明书

R e l e a s e d a t e : 2017-02-10 14:48D a t e o f i s s u e : 2017-02-10202093_e n g .x m lRefer to “General Notes Relating to Pepperl+Fuchs Product Information”.R e le a s e d a t e : 2017-02-10 14:48D a t e of i s s u e : 2017-02-10202093_e ng .x m lRefer to “General Notes Relating to Pepperl+Fuchs Product Information”.Technical dataGeneral specifications Effective detection range 0.4 ... 8 m Light source IREDLight typemodulated infrared light , 850 nm Protection field height see Table 1, max. 2400 mmOperating mode Startup/restart disable, deactivateable Optical resolution 60 mm Angle of divergence 5 °Ambient light limit Not sensitive to ambient light in accordance with EN 61496-2UL File NumberE215245Functional safety related parameters Safety Integrity Level (SIL) SIL 3Performance level (PL) PL e Category Cat. 4Mission Time (T M ) 20 a PFH d Depending on the protection field height; see Manual Type 4Indicators/operating means Operation indicator green: Power onFunction indicator Green: OSSD ON , Red: OSSD OFFStatus indicator Transmitter unit: LED yellow: Mode, test or errorReceiver: LED yellow: Start readiness, function reserve or errorElectrical specifications Operating voltageU B 24 V DC (-20%, +30%) ; Power supply with safe isolation: 24 V DC No-load supply current I 0Transmitter unit:≤ 150 mAReceiver: ≤ 150 mA (without outputs)Protection class III , IEC 61140Power consumptionP 0Transmitter unit: 5 W Receiver: 15 W Input 1Input type Transmitter unit test Input formatBreak contact Switching voltage 24 V DC Input current 5 mAInput 2Input type Transmitter unit, mode A/B Function Beam Code A: open or 0 V Beam Code B: 24 V DC, 5 mA Input 3Input type Receiver unit relay monitor Input formatBreak contact Switching voltage 24 V DC Input current 5 mAInput 4Input type Receiver unit, start release Input format Break contact Input current 5 mAInput 5Input type Receiver unit, mode A/B (see transmitter unit, mode A/B)OutputResponse time see Table 1, max. 23 msOutput 1Output type Receiver unit OSSDSignal output PNP semiconductor , monitored for short and cross circuits Switching voltage ON: U B - 2 V; OFF: < 1 V Switching current ON: max. 0.1 A; OFF: < 5 µAOutput 2Output type Receiver signal output start readinessSignal output PNP-semiconductor, short-circuit protected, 0.1A Ambient conditions Ambient temperature -30 ... 60 °C (-22 ... 140 °F)Storage temperature -30 ... 70 °C (-22 ... 158 °F)Relative humidity max. 95 %, not condensingMechanical specifications Housing length L see table 2Degree of protection IP65 , For indoor use onlyConnectionTransmitter unit: 4-pin, M12 x 1 connector Receiver: 8-pin, M12 x 1 connector Cable cross section min. 0.25 mm 2 Max. cable length 50m MaterialHousing extruded aluminum section , gold anodized Optical face Plastic pane , Transparent polycarbonate Masssee table 2R e l e a s e d a t e : 2017-02-10 14:48D a t e o f i s s u e : 2017-02-10202093_e n g .x mlRefer to “General Notes Relating to Pepperl+Fuchs Product Information”.Table 1 - Response time:Table 2 - Total length and weight:Mounting aidOMH-SLCT-01Press & Release q u ick clamp and adj u stment systemOMH-SLCT-02Attachment aid for Press &Release q u ick clamp and adj u stment systemOMH-SLCT-03Mo u nting aid w ith fixed bearing (long) for mo u nting or u sed to connect 2 light gids OMH-SLCT-04Mo u nting aid w ith loose bearing (narro w )Other accessories TR 14/30/50/60Test rod for 14mm, 30mm, 50mm or 60mm resol u tionAA SLCT-01Alignment aid (box le v el to snapped into the lateral groo v es), Angle error: < 1°Connecting cableV1-G-BK2M-PUR-U:Cable, M12, 4-pin, 2m, UL-connector V1-G-BK5M-PUR-U:Cable, M12, 4-pin, 5m, UL-connector V1-G-BK10M-PUR-U:Cable, M12, 4-pin, 10m, UL-connector V19-G-BK2M-PUR-U:Cable, M12, 8-pin, 2m, UL-connector V19-G-BK5M-PUR-U:Cable, M12, 8-pin, 5m, UL-connector V19-G-BK10M-PUR-U:Cable, M12, 8-pin, 10m, UL-connectorCompliance with standards and directi-vesDirective conformity Machinery Directive 2006/42/EC EN ISO 13849-1:2008 ; EN 61496-1:2013EMC Directive 2004/108/EC EN 61000-6-3:2007+A1:2010 ; EN 61000-6-4:2007+A1:2011Standard conformity Functional safety IEC 61508:2010 part 1-4Standards IEC 61496-2:2013Approvals and certificates CE conformity CEUL approval cULus ListedCCC approval CCC approval / marking not required for products rated ≤36 V TÜV approvalTÜVAdditional informationHeight of the protected area[mm]Response time[ms]30096001190013120015150017180019210021240023Height of the protected area[mm]Total length oftransmitter/recei v er u nit[mm]Weight oftransmitter/recei v er u nit[g]30041925060071943090010196001200131976015001625940180019251100210022251270240025251440System accessories。
电气图形符号英文缩写

f 频率 F.C. 固 定居中
f.e.t. 场效应晶 体管 f.m. 频 率调制 f.r. 频 率响应或 射程 f.s.d. 满标偏转
f.s.k. 频移键控
FBLT 光 纤限弯软 管 FCC 联邦 通信委员 会 FDA 联邦 药品管理 局 FDDI 光 纤分布式 数据界面
Fe 铁 FeCr 铁 镍合金 FEP 乙烯 乙基醇 FFC 扁形 软性电缆
o/p 输出
OEM 原始 设备制造 商 OFC 无氧 铜 OFTEL 电 信管制局
OHP 投影 仪 OHT 投影 片 op-amp 运算放大 器 OTDR 光 时域反射 计 OVE 奥地 利电气标 准
p 微微 (10 12) p.a.m. 脉冲振幅 调制
p.r.f. 脉冲重复 频率 PA 公共 地址 PA 多聚 醯胺(尼 龙) PABX 私 人自动交 换分机 PAL 逐行 倒相 PAL 逐行 倒相 PAT 便携 测试器 PBT 多聚 丁烯苯二 甲酸酯 PBX 专用 电话交换 机 PC 多聚 碳酸盐 pc 块 PCB 印刷 电路板 pce 块 PCI 周边 零件连接 界面 PCM 脉冲 编码调制
MPEG 动 态图像专 家组 MPU 微处 理器 MPX 多路 复用 MSCP 平 均球面光 强度 MTA 大批 装配终止
MUSA 多 单元方向 性可控天 线 mV 毫伏 特 mW 毫瓦 特
n 毫微 (10 - 9)
N 牛顿 n/c 未连 接;正常 闭路 n/o 正常 通路 Na? 钠 NAMAS 国 家计量认 可服务处
NiMH 镍金属氧化 物 Nm 牛顿 米 NMOS 负 极通道金 属氧化物 半导体 NOS 牛顿 操作系统
NPN 负 极,正 极,负极 (晶体 管) ns 毫微 秒 ns/m 每 米毫微秒
BALLUFF直线位移传感器选型手册
系列
冲击负载 振动 极性反接保护 过电压保护 绝缘强度 外壳防护等级 符合 IEC 60529 外壳材料 安装方式 10.2 mm 不锈钢管耐压强度 8 mm 不锈钢管耐压强度 连接方式 电磁兼容性测试: 无线电放射干扰 (RF) 静电干扰 (ESD) 电磁场干扰 (RFI) 瞬间高速干扰脉冲 (BURST) 因高频场感应干扰引起的 线路噪声 标准额定检测长度 [mm] 直径8 mm金属管 检测长度至1016 mm
微脉冲位移 传感器
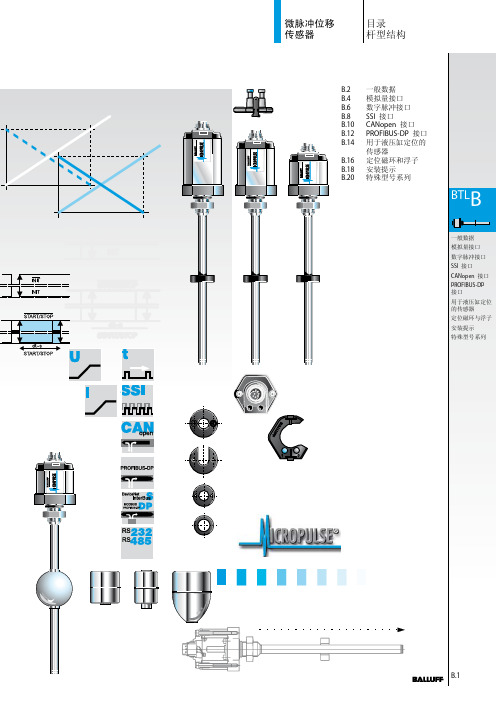
BTL5 杆型结构
一般数据 杆型结构
额定检测长度=检测区域 磁环
衰减区 (无效区)
螺纹 M18x1.5 安装面
额定检测长度=检测区域 磁环
螺孔 M4×4/6 深
衰减区 (无效区)
螺纹 3/4"x16 UNF 安装面
额定检测长度=检测区域
螺孔 M4×4/6 深
标准订货中包含 – 位移传感器 (从B.4 开始选取您所需的接口) – 简明用户手册
另请单独订购:
定位磁环 见 B.16 安装螺帽 见 B.16 浮子 见 B.17 插头 见 BKS.3
B.
系列
外壳 B BTL5_ _ _ _ -B-_ _ _ _ 公制安装螺纹 M18×1.5
B = 标准外壳
外壳 Z BTL5_ _ _ _ -Z-_ _ _ _ 3/4" UNF 安装螺纹
外壳 B8 BTL5_ _ _ _ -B8-_ _ _ _ 公制安装螺纹 M18×1.5 8 mm 直径金属杆 最大额定检测长度 1016 mm
外壳 Z8 BTL5_ _ _ _ -Z8-_ _ _ _ 3/4" UNF 安装螺纹 8 mm 直径金属杆 最大1016 mm 额定检测长度
压接培训教材

单芯绝缘低压电线
具有优良的耐低温性能
-40~+90
单芯超薄壁绝缘低压电线
外径和重量均减小
-40~+105
单芯超薄壁聚酰胺绝缘低压电 线
具有优良的机械性能,适用于燃油 液位传感器连接线
-40~+105
单芯超薄壁PP绝缘低压电线 无卤阻燃
-40~+125
单芯TPE-E绝缘低压电线
单芯超薄壁PVC绝缘及护套缠 绕屏蔽低压电线
30 70/0.80 35.19 8.0
1.4
0.85f 16/0.26 0.8846 1.2 0.6
40 85/0.80 42.73 8.6
1.4
1.25f 50/0.18 1.273 1.5 0.6
50 108/0.80 54.29 9.8
1.6
1.25 16/0.32 1.287 1.5 0.6
2 26/0.32 2.0910 1.9 0.5
3 41/0.18 3.2970 2.4 0.6
5 65/0.32 5.2280 3.0 0.7
注:表中的f表示线芯为软结构
导线
2.2.1:日标导线导体结构—AVSபைடு நூலகம்、CAVS电缆结构
标称 截面 mm2
导体 结构 根数/ 直径
导体
计算 截面 mm2
近似 外径 mm
1.00 1.00 1.25 16/0.32 1.20 1.00 2.0 26/0.32 1.20 1.00
1.50 1.00 1.90 1.10
2.2.1:日标导线导体结构—AEX、AVX型电线结构尺寸表
标称 截面 mm2
导体 结构 根数/直径
导体
计算 截面 mm2
E3Z-T61-L光电开关
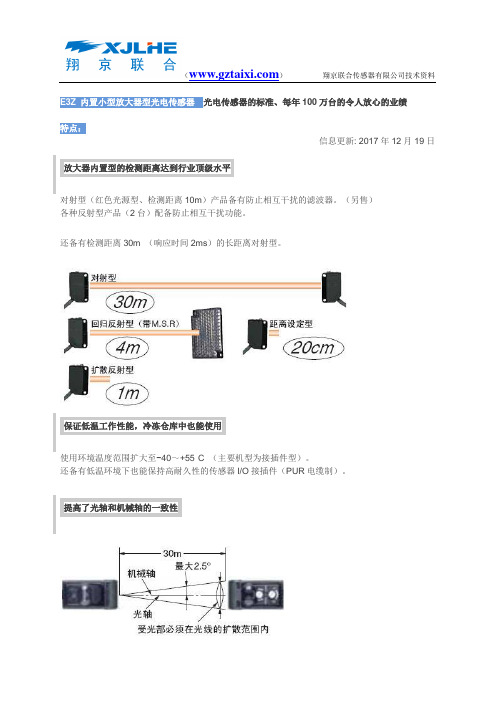
E3Z 内置小型放大器型光电传感器光电传感器的标准、每年100万台的令人放心的业绩特点:信息更新: 2017年12月19日放大器内置型的检测距离达到行业顶级水平对射型(红色光源型、检测距离10m)产品备有防止相互干扰的滤波器。
(另售)各种反射型产品(2台)配备防止相互干扰功能。
还备有检测距离30m (响应时间2ms)的长距离对射型。
保证低温工作性能,冷冻仓库中也能使用使用环境温度范围扩大至−40~+55°C (主要机型为接插件型)。
还备有低温环境下也能保持高耐久性的传感器I/O接插件(PUR电缆制)。
提高了光轴和机械轴的一致性光轴和机械轴的偏差控制在±2.5°以内,只需配合机械轴进行安装,即可与光轴实现高精度对准。
(对射型、回归反射型)即使接线出错,也能保护传感器配备输出反接保护功能。
(输出线路增加反接保护用二极管)完全符合欧洲RoHS指令未使用铅、水银、镉、六价铬、多溴联苯、多溴联苯醚。
包装袋使用可焚烧处理的聚乙烯材料。
种类:信息更新: 2017年7月25日标准型、本体检测方式形状连接方式检测距离型号NPN输出PNP输出对射型(投光器+ 导线引出型(2m)15m(红外光)E3Z-T61 2M *3 *4投光器E3Z-T61-L 2M受光器E3Z-T61-D 2ME3Z-T81 2M *3 *4投光器E3Z-T81-L 2M受光器E3Z-T81-D 2M受光器)接插件型(M8) E3Z-T66投光器E3Z-T66-L受光器E3Z-T66-DE3Z-T86投光器E3Z-T86-L受光器E3Z-T86-D导线引出型(2m)10m(红色光) E3Z-T61A 2M *3投光器E3Z-T61A-L2M受光器E3Z-T61A-D2ME3Z-T81A 2M *3投光器E3Z-T81A-L2M受光器E3Z-T81A-D2M接插件型(M8) E3Z-T66A投光器E3Z-T66A-L受光器E3Z-T66A-DE3Z-T86A投光器E3Z-T86A-L受光器E3Z-T86A-D导线引出型(2m)30m(红外光) E3Z-T62 2M *3投光器E3Z-T62-L 2M受光器E3Z-T62-D 2ME3Z-T82 2M投光器E3Z-T82-L 2M受光器E3Z-T82-D 2M接插件型(M8) E3Z-T67投光器E3Z-T67-L受光器E3Z-T67-DE3Z-T87投光器E3Z-T87-L受光器E3Z-T87-D回归反射型(带M.S.R.功能) *1 导线引出型(2m)4m〔100mm〕(红色光)*2E3Z-R61 2M *3 *4E3Z-R81 2M *3 *4接插件型(M8))E3Z-R66E3Z-R86扩散反射型导线引出型(2m)5~100mm(广视野)(红外光)E3Z-D61 2M *3E3Z-D81 2M *3 *4接插件型(M8) E3Z-D66E3Z-D86导线引出型(2m)1m(红外光)E3Z-D62 2M *3 *4E3Z-D82 2M *3 *4接插件型(M8) E3Z-D67E3Z-D87导线引出型(2m)90±30mm(细光束)(红色光)E3Z-L61 2M *3 *4E3Z-L81 2M *3 *4接插件型(M8) E3Z-L66E3Z-L86距离设定型E3Z-LS 导线引出型(2m)20~40mm(BGS min设定)(红色光)20~200mm(BGS max设定)(红色光)40~受光量受光量阀值(FGS min设定)(红色光)200~受光量E3Z-LS61 2M *3E3Z-LS81 2M *3接插件型(M8) E3Z-LS66E3Z-LS86受光量阀值(FGS max设定)(红色光)导线引出型(2m) 2~20mm(BGS min设定)(红色光)2~80mm(BGS max设定)(红色光)E3Z-LS63 2M E3Z-LS83 2M *4接插件型(M8) E3Z-LS68E3Z-LS88凹槽型对射型E3Z-G 1光轴导线引出型(2m)25mm(红外光)E3Z-G61 2M *3 *4E3Z-G81 2M *3 *4 2光轴E3Z-G62 2M *3E3Z-G82 2M *31光轴接插件型(M8))E3Z-G61-M3E3Z-G81-M3J2光轴E3Z-G62-M3J E3Z-G82-M3J仅限透明玻璃板型反射型导线引出型(2m)30±20mm(红色光)E3Z-L63 2M E3Z-L83 2M 接插件型(M8) E3Z-L68E3Z-L88透明瓶体型回归反射型(无M.S.R功能) *1导线引出型(2m)500mm〔80mm〕(红色光)*2E3Z-B61 2M E3Z-B81 2M *3接插件型(M8))E3Z-B66E3Z-B86导线引出型(2m)2m〔500mm〕(红色光)*2E3Z-B62 2M *3E3Z-B82 2M *3接插件型(M8) E3Z-B67E3Z-B87*1. 不附带反射板。
电线电缆知识详解

电线电缆主要分类裸电线体制品本类产品的主要特征是:纯的导体金属,无绝缘及护套层,如钢芯铝绞线、铜铝汇流排、电力机车线等;加工工艺主要是压力加工,如熔炼、压延、拉制、绞合/紧压绞合等;产品主要用在城郊、农村、用户主线、开关柜等。
电力电缆电气装备用电线电缆该类产品主要特征是:品种规格繁多,应用范围广泛,使用电压在1kV及以下较多,面对特别场合不断衍生新的产品,如耐火线缆、阻燃线缆、低烟无卤/低烟低卤线缆、防白蚁、防老鼠线缆、耐油/耐寒/耐温/耐磨线缆、医用/农用/矿用线缆、薄壁电线等。
通讯电缆及光纤随着通讯行业的飞速进展,从过去的简洁的电话电报线缆进展到几千对的话缆、同轴缆、光缆、数据电缆,甚至组合通讯缆等。
该类产品结构尺寸通常较小而匀称,制造精度要求高。
绕组线绕组线是一种具有绝缘层的导电金属电线,用以绕制电工产品的线圈或绕组。
起作用时通过电流产生磁场,或切割磁力线产生感应电流,实现电能和磁能的转换,故又成为电磁线。
结构材料电线电缆产品绝大多数是截面(横断面)外形全相同(忽视因制造而产生的误差)、呈长条状的产品,这是由于在系统或设备中是作为构成线路或线圈而使用的特征所打算的。
所以讨论分析线缆产品的结构组成,只需从其截面来观看分析。
电线电缆产品的结构元件,总体上可分为导线、绝缘层、屏蔽和护层这四个主要结构组成部分以及填充元件和承拉元件等。
依据产品的使用要求和应用场合,有的产品结构极为简洁。
2.电缆材料从某种意义上讲,电线电缆制造行业是一个材料精加工和组装的行业。
一是材料用量巨大,线缆产品中的材料费用要占制造总成本的80-90%;二是所用材料的类别、品种特别多,性能要求特殊高,如导体用铜,要求铜的纯度要在99.95%以上,有的产品要采纳无氧高纯铜;三是材料的选用会对制造工艺、产品的性能以及使用寿命起到打算性的影响。
同时,电线电缆制造企业的效益也与材料的选用、加工和生产管理中能否科学地节约材料亲密相关。
因此,在设计电线电缆产品时必需与材料的选用同时进行,一般实行选用几种材料,通过工艺和与性能筛选试验后确定。
卫星磁姿态控制方法与算法综述
第22卷第1期2024年1月动力学与控制学报J O U R N A L O FD Y N AM I C SA N DC O N T R O LV o l .22N o .1J a n .2024文章编号:1672G6553G2024G22(1)G001G021D O I :10.6052/1672G6553G2023G011㊀2022G12G02收到第1稿,2023G01G14收到修改稿.∗国家自然科学基金资助项目(U 21B 2050),N a t i o n a lN a t u r a l S c i e n c eF o u n d a t i o no fC h i n a (U 21B 2050).†通信作者E Gm a i l :111976345@i m u .e d u .c n卫星磁姿态控制方法与算法综述∗穆硕1㊀占英2†㊀宝音贺西1(1.清华大学航天航空学院,北京㊀100084)(2.内蒙古大学电子信息工程学院,呼和浩特㊀010021)摘要㊀自太空探索之初,姿态控制磁控系统便因其体积小㊁质量轻㊁成本低㊁可靠性高等优点被广泛应用于各类轨道卫星.近些年,随着微小卫星技术的迅猛发展,姿态控制磁控系统满足了微小卫星对质量㊁空间等资源的限制,成为了学者们研究的热点.本文综述了自20世纪60年代以来卫星尤其是微小卫星所采用的主要磁姿态控制方法和算法,包括飞轮起旋与卸载算法㊁被动以及主动磁姿态控制算法等.其中主动磁姿态控制算法包括主动磁阻尼算法㊁磁控与自旋㊁定转速飞轮㊁重力梯度力矩结合的算法以及纯磁控算法.最后对该研究进行了总结与展望.关键词㊀卫星磁控,㊀飞轮起旋与卸载,㊀被动磁控,㊀主动磁阻尼,㊀磁控与其他方式结合,㊀纯磁控中图分类号:V 412.4+2文献标志码:AA nO v e r v i e wo fM a g n e t i cA t t i t u d eC o n t r o lA l go r i t h m s f o r S a t e l l i t e s ∗M uS h u o 1㊀Z h a nY i n g 2†㊀B a o yi nH e x i 1(1.S c h o o l o fA e r o s p a c eE n g i n e e r i n g ,T s i n g h u aU n i v e r s i t y ,B e i j i n g㊀100084,C h i n a )(2.S c h o o l o fE l e c t r o n i c I n f o r m a t i o nE n g i n e e r i n g ,I n n e rM o n g o l i aU n i v e r s i t y,H u h h o t ㊀010021,C h i n a )A b s t r a c t ㊀M a g n e t i c a t t i t u d e c o n t r o l s y s t e m s h a v e b e e nw i d e l y us e d f o r l o we a r t h o r b i t s a t e l l i t e s s i n c e t h e b e g i n n i n g o f s p a c e e r a b e c a u s e o f t h e i r r e l i a b i l i t y ,l i g h t w e i g h t ,l o wc o s t a n d e n e r g y e f f i c i e n c y .R e c e n t l y,s m a l l s a t e l l i t e sa r e i n c r e a s i n g l y a t t r a c t i v e .M a gn e t i cc o n t r o l l e r s m e e t t h e l i m i t a t i o n so f s m a l l s a t e l l i t e s a n d a r e c o n s i d e r e da s f a v o r a b l e c a n d i d a t e s f o r s m a l l s a t e l l i t e s .I n t h i s p a p e r ,t h e s a t e l l i t em a gn e t i c a t t i Gt u d e c o n t r o l a l g o r i t h m s ,i n c l u d i n g a l g o r i t h m s f o r r e a c t i o nw h e e l s t a r t Gu p a n du n l o a d i n g ,pa s s i v e a n d a c Gt i v em a g n e t i c a t t i t u d e c o n t r o l a l g o r i t h m s ,a r e c o v e r e d .T h e a l g o r i t h m s h e r e i n a r e e s p e c i a l l y f o r s m a l l s a t Ge l l i t e s .A s f o r a c t i v em a g n e t i c a t t i t u d e c o n t r o l a l g o r i t h m s ,m a g n e t i c d a m p i n g a l g o r i t h m s ,t h e a l g o r i t h m s c o mb i n i n g m a g n e t ic c o n t r o lw i t hs p i n ,c o n s t a n t s p e ed f l y w he e l a n d g r a v i t yg r a d i e n t t o r q u e ,a n d p u r e l y m a g n e t i c c o n t r o l a l g o r i t h m s a r e c o v e r e d .F i n a l l y,t h e r e s e a r c h i s s u mm a r i z e d .K e y wo r d s ㊀s a t e l l i t em a g n e t i c c o n t r o l ,㊀r e a c t i o nw h e e l s t a r t Gu p a n du n l o a d i n g ,㊀p a s s i v em a g n e t i c c o n Gt r o l ,㊀a c t i v em a g n e t i c a n g u l a r v e l o c i t y d a m p i n g ,㊀m a gn e t i c c o n t r o l w i t h o t h e r a c t u a t o r s ,㊀p u r e l y m a gn e t i c c o n t r o l动㊀力㊀学㊀与㊀控㊀制㊀学㊀报2024年第22卷引言自探索太空之初,磁姿态控制系统便因其轻便,可靠等诸多优点受到卫星设计者的青睐.第一颗成功使用磁姿态控制系统的卫星是T r a n s i t1B,由美国约翰霍普金斯大学应用物理实验室(A P L)设计.该卫星于1960年4月发射,采用被动磁控,进行了89天在轨操作[1].1960年11月,第一颗采用主动磁姿态控制的卫星T i r o s I I成功发射[2].相比于其他控制方式,磁姿态控制系统具有质量轻㊁体积小㊁成本低㊁可靠性高,使用寿命长等诸多优点,是低轨近地卫星尤其是微小卫星实现稳定控制的首选.磁姿态控制系统依靠卫星自身磁矩m与地磁场强度矢量B相互作用,产生控制力矩T.被动磁控卫星主要通过永磁体与磁滞棒产生磁矩;主动磁控卫星则需要通过电流驱动磁力矩器产生所需磁矩.磁控力矩计算公式为:T=mˑB(1)从公式(1)中可看出,磁姿态控制系统的主要缺点是无法施加独立的三轴控制力矩,在每一瞬时只能产生垂直于卫星所处地磁场的控制力矩,这会大幅降低姿态控制效果,甚至出现瞬时不可控.磁姿态控制卫星的可控性一直困扰着学者们.直到2003年,B h a t与D h a m[3]基于周期性地磁场假设,证明了磁控卫星的可控性:当卫星沿非赤道轨道运行时,地磁场方向会随卫星位置改变而不断发生变化.这种变化使得磁控系统不可控方向也在不断变化,确保了磁控卫星的可控性.随后, S m i r n o v等[4]证明了在偏离平衡点较小时,可利用两轴磁控实现卫星稳定姿态控制.Y a n g[5]基于线性时变系统理论,证明了在卫星惯量满足一定条件时,可实现磁控卫星稳定姿态控制.地磁场模型精度是决定所设计磁姿态控制系统能否成功实施的另一个关键因素.目前,最精确的地磁场模型为国际地磁参考场(I G R F模型),由国际地磁与气象学协会(I A G A)于1968年提出,此后每五年更新一次,目前为第13代[6].I G R FG13采用13阶球谐函数模型,结构复杂,通常适用于数值仿真过程.而对磁控算法的理论分析,学界通常采用偶极子假设.常用的偶极子模型有倾斜偶极子模型㊁直接偶极子模型以及简化偶极子模型[7].基于偶极子假设并忽略地球自转的影响,卫星所处地磁场会随卫星轨道运动而周期性变化.同时,也可采用更高阶球谐函数进行更精确的理论分析[8,9].本文参考了前人的综述文章[10G13],沿用了文献[11]的分类结构,整理综述了自20世纪60年代以来卫星尤其是微小卫星所采用的主要磁姿态控制方法和算法,包括飞轮起旋㊁卸载,被动以及主动磁姿态控制算法,重点关注主动磁姿态控制算法的发展.其中主动磁姿态控制算法包括BGd o t等主动磁阻尼算法,磁控与自旋㊁定转速飞轮㊁重力梯度力矩结合的算法以及纯磁控算法.最后,本文对各类磁控算法进行了总结与展望.1㊀飞轮起旋与卸载1.1㊀飞轮起旋根据动量矩守恒原理,当飞轮的动量矩变化时会改变卫星的动量矩.目前主要有两类磁控算法用于飞轮起旋问题[14].第一种方法首先利用磁力矩器与飞轮实现卫星稳定控制.此阶段磁控制律可采用P D控制律.卫星稳定后加速飞轮至目标转速,利用磁力矩器维持卫星姿态稳定[14,15].另一种方法是在卫星实现稳定控制前起旋飞轮,再利用磁力矩器与定转速飞轮稳定卫星.C h a n g等人在姿态获取阶段起旋俯仰轴飞轮,并使用BGd o t控制律阻尼卫星角速度[14].该方案可更快实现稳定控制.研究表明,在BGd o t控制律下,卫星姿态误差会以指数形式进行收敛[16].M e n g 等人设计了两种用于飞轮起旋的磁控律[17]: m=Bˑ(-k1h )B 2(2)m=Bˑ(-k1h -k2θ )B 2(3)其中m为卫星本体系下磁力矩器产生的磁矩,B为本体系下的地磁场强度矢量,h 为飞轮起旋产生的干扰力矩,θ 为三轴姿态误差的时间导数,k1,k2为控制增益.上述控制律均可在姿态稳定前使用.当角速度信息可知时,卫星采用控制律(3)进行控制.1.2㊀飞轮卸载工程中磁控制系统常用于飞轮角动量卸载.飞轮可抵抗环境干扰力矩的影响,实现卫星高精度姿2第1期穆硕等:卫星磁姿态控制方法与算法综述态控制.但同时,由于一些常值干扰力矩的影响,如气动力矩,飞轮的转速可能会持续增加.当上升至最高转速时,飞轮将不能提供有效的控制力矩.需在飞轮转速达到其上限值前进行角动量卸载.常用的卸载方法有喷气卸载,磁卸载等.但喷气卸载需消耗卫星燃料.而磁卸载可利用电能进行卸载,且使用寿命长.1961年,W h i t e等人[18]提出了叉乘磁卸载控制律,在磁控卫星中应用广泛[19G21],具体形式为:m=kΔh wˑB(4)其中k为控制增益,Δh w为飞轮角动量与目标角动量差值.通过该控制律,磁控力矩可卸载垂直于地磁场强度矢量B的角动量分量.通常,当Δh w与地磁场矢量的夹角足够大时(如夹角处于45~135度之间),才启动磁力矩器卸载,以防止垂直于Δh w的磁力矩分量过大对卫星产生不利影响.该控制律也可采用b a n gGb a n g控制形式计算所需磁矩[22].针对叉乘控制律,后续文献进行了大量研究.C a m i l l o与M a r k l e y[22]推导了叉乘控制律解析分析公式.该公式可用于增益系数k的初步选取.N iGn o m i y a等人[23]对叉乘控制律进行了改进,使得控制律可同时实现飞轮角动量卸载与卫星章动阻尼.H a b l a n i[24]使用线性极点配置方法,对叉乘控制律增益系数进行设计.针对冗余配置的飞轮系统,L e b e d e v[25],H o g a n与S c h a u b[26]设计的叉乘控制律可确保每个飞轮的转速都卸载到零值附近.T rég o uët等人[27]与A v a n z i n i等人[28]改进的叉乘控制律可在磁卸载的同时保证姿态控制律的渐进稳定.一些优化方法也被用于飞轮磁卸载控制律设计.G l a e s e等人[29]设计了能量最优磁卸载控制律.F l a s h n e r与B u r n s[30]提出了一种基于单元映射方法的离散磁卸载控制律.该控制律基于周期性磁场假设,可离线设计优化方案.S t e y n[31]基于L Q R方法,通过最小化目标函数J=ʏt f t0(h T w Q h w+m T R m)d t(5)实现了磁卸载控制律的优化.其中h w为飞轮角动量,Q,R为权重矩阵.G i u l i e t t i等人[32]构建了结合时间最优与能量最优的目标函数,即:J=-aΔt-(1-a)2ʏt f t0(m2x+m2y)d t(6)其中a为调节机动时间与能量消耗比例的权重系数.通过最大化目标函数,文献[32]给出了包含参数a的磁卸载控制律.此外,Hɕ方法也被用于磁卸载控制律优化[33].磁卸载也可结合其他卸载方法提高效果.C h e n等人[34]将磁卸载与喷气卸载组合,节省了喷气卸载的燃料消耗,同时提高了卸载速度.B u r n s与F l a s h n e r[35]利用重力梯度力矩㊁磁力矩㊁气动力矩三种环境力矩,设计了具有自适应特性的磁卸载控制律.其他方案如模型预测方法[36],被动阻尼方法[37],点映射技术[38,39]等均可应用于磁卸载控制律设计.2㊀被动磁姿态控制被动磁姿态控制系统结构简单,性能可靠,不消耗卫星能源,常应用于设备有限且控制精度要求较低的卫星.其通常包括永磁体与磁滞棒两个组件.其中永磁体用于控制卫星指向,使其大致沿所处地磁场方向.磁滞棒通过磁化作用,可起到角速度阻尼作用.二者结合可实现低精度稳定姿态控制.被动磁姿态控制系统最早于1960年应用于美国海军通讯试验星[40].通过被动磁控与机械消旋设备,该卫星成功实现了角速度阻尼与稳定指向.1960年6月,该项目另一颗试验星T r a n s i t2A成功发射.该卫星仅凭借被动磁姿态控制系统实现了稳定控制[40].第一颗由大学自主研发的被动磁控卫星I n j u n3于1962年成功发射入轨[41].此后,更多被动磁控卫星任务成功实施,如E S R OG1A(1968),E S R OG1B(1969),A z u r(1969),E x o s(1978),M a g i o n(1978)[42].随着星载计算机与控制设备的发展,被动磁姿态控制系统已不能满足卫星任务高精度与多样化需求.至20世纪70年代中期,被动磁姿态控制系统逐渐被主动控制方法替代.直到微小卫星技术的兴起,被动磁姿态控制系统再次受到学者关注.其满足了微小卫星质量㊁空间以及设备成本的限制,在一些大学自主研发的试验星或演示卫星中应用广泛.1990年,四颗采用被动磁控的微小卫星被送入太空[43].此后,更多应用被动磁控的微小卫星相继发射[42,44G50].被动磁姿态控制原理简单,无需设计复杂的控3动㊀力㊀学㊀与㊀控㊀制㊀学㊀报2024年第22卷制算法.目前学者更多关注主动磁姿态控制算法设计.3㊀主动磁姿态控制3.1㊀主动磁阻尼控制当卫星角速度过大时,部分星载仪器如星敏感器无法正常使用,需使用星载设备降低卫星角速度至一定阈值.与运载器分离㊁执行变轨等机动操作或是设备故障均可能使角速度过大,因此,角速度阻尼是卫星姿态控制的必需过程.虽然喷气控制,飞轮控制等方法均可阻尼角速度,但喷气控制会消耗卫星燃料,飞轮控制易饱和.相比之下,磁阻尼控制不仅节省能源,还具备性能可靠,成本低廉等优势,在各类卫星中应用广泛.S t i c k l e r与A l f r i e n d[19]提出了著名的主动磁阻尼算法 BGd o t 控制律.该控制律最早出现在1972年[51],利用地磁场导数信息进行角速度阻尼,具体表达式为:m=-k B (7)其中k为正增益系数,B 为地磁场强度矢量相对于卫星本体系的导数.利用绝对导数与相对导数的关系,即:d Bd t=B +ωˑB(8)其中d B/d t为地磁场强度矢量相对于惯性系的导数,式(7)可表示为:m=-k d B d t+k ωˑB(9)由于地磁场强度矢量在惯性系中变化的角频率仅为轨道角速度两倍,而通常在阻尼过程中卫星角速度较大,因此式(9)右侧第一项可近似为零.故式(9)可进一步简化为:m=k ωˑB(10)卫星转动动能E的时间导数可表达为:d Ed t=T ω=(mˑB) ω=-k(ωˑB)2ɤ0(11)从上式可看出,采用BGd o t控制律可有效减小卫星转动动能,实现角速度阻尼.BGd o t控制律具有很强的鲁棒性,通常利用当前时刻与前一时刻磁强计测量数据进行差分便可有效阻尼角速度.同时,BGd o t控制律可转化为b a n gGb a n g控制形式,适用于实际工程问题[52].基于等式(9)的假设,BGd o t控制律可以指数形式进行收敛[53,54],具体收敛速度受轨道倾角等因素影响[54].BGd o t也存在缺点.首先在阻尼精度方面,由于在上述分析中忽略了地磁场矢量相对于惯性系的时间变化率,即地磁场变化项,该项会对最终阻尼精度产生较大影响.研究发现,BGd o t控制律最终会有约二倍轨道角速度的误差[55].同时,剩磁等干扰力矩会进一步降低阻尼精度.为克服地磁场变化项等带来的不利影响,学者们对BGd o t控制律进行了改进[56G61],其中大部分变形基于等式(9).该变形可阻尼卫星角速度至零,但同时需要角速度测量数据,提高了测量设备需求.为减少测量设备,D e s o u k y与A b d e l k h a l i k[62]基于地磁场数据对角速度进行等效计算,给出了改进的BGd o t控制律.该控制律可保证磁力矩器需产生的磁矩m时刻垂直于卫星所处地磁场,提高了磁利用效率.蒙特卡罗仿真实验验证了该控制律的有效性.同时,该控制律可在一定程度上减少收敛时间,降低能源消耗.J i n等人为惯量缺陷卫星(z轴惯量大于其他两轴)提出了垂直消旋控制律[63]:m=k BˑBB 3(12)该控制律可避免z轴长时间指向太阳而造成仪器损坏.一些学者研究了增益系数k的选取方法.A v a n z i n i与G i u l i e t t i[57]基于卫星轨道与形状特征,提出了一种增益系数调整方法,具体表达式为: k=2ω0(1+s i nζm)J m i n/ B 2(13)其中ζm为卫星轨道倾角,ω0为轨道角速度,J m i n 为卫星最小惯量矩.W i sᶄn i e w s k i与B l a n k e[56]利用正定矩阵替换标量增益系数k,增强了阻尼效果,同时为后续优化提供了更多空间.需要注意的是,文献[56]中关于被动重力梯度稳定性的证明在文献[64]中进行了更正.随着仪器设备与微小卫星技术的发展,BGd o t 控制律也发展出了适用于纳卫星㊁立方星的方案[65G70],如嵌入式磁线圈控制等.同时,新型磁阻尼方案如反馈阻尼控制律[71]也相继提出.但由于BG4第1期穆硕等:卫星磁姿态控制方法与算法综述d o t 的简便性与鲁棒性,其仍是目前乃至未来很长一段时间磁阻尼算法的首选.目前磁阻尼算法体系已较为完备,要取得较大研究进展十分困难.3.2㊀组合磁姿态控制系统由于磁姿态控制系统无法施加独立的三轴控制力矩,其通常结合其他设备与方法实现高精度稳定控制,如自旋㊁飞轮㊁重力梯度力矩等.3.2.1㊀磁控与自旋结合磁控与自旋结合克服了磁控的固有缺陷,同时具有低功耗㊁低成本㊁高控制精度等优点,因此应用广泛,也是目前磁控卫星的主要控制方案之一.通过围绕最大惯量主轴旋转,自旋卫星可获得自旋稳定性.若无外界干扰,自旋卫星可在惯性空间中维持稳定.但由于太阳光压力矩等的影响,自旋卫星会发生章动,需采用其他控制方法对自旋卫星的旋转轴指向与转速进行控制,而磁控则是首选.第一颗磁控与自旋相结合的卫星发射于1960年[2].此后,该方案被广泛应用于各类卫星任务.其中由S h i g e h a r a [72]提出的b a n g Gb a n g 控制律应用广泛.该控制律采用特定开关函数实现磁力矩器磁矩的正负控制,具体公式如下:m j =m 0,Δh (e j ˑB )>0-m 0,Δh (e j ˑB )<0{(14)其中m j 为沿卫星本体系坐标轴e j 的磁矩大小;j =1,2,3;m j 的幅值为m 0;Δh 为当前卫星角动量与目标角动量差值.该控制律可使卫星沿特定轴自旋,并调整自旋轴的惯性空间指向.该方案也广泛应用于立方星等微小卫星[73].C r o c k e r 与V r a b l i k[74]提出了可使卫星自旋轴z 轴垂直于太阳矢量的b a n g Gb a n g 控制,即:m z =m 0,㊀㊀e s >0-m 0,㊀e s <0{(15)其中e 为卫星自旋轴,s 为本体系下太阳方向矢量.b a n g Gb a n g 控制还可与BGd o t 控制律结合解决自旋卫星章动问题.H o l d e n 与L a w r e n c e [75]基于李雅普诺夫方法设计了章动控制律,该控制律仅使用自转轴方向磁力矩器进行控制:m z =m 0s i g n [(C -A )B y ωx -(C -B )B x ωy ](16)其中A ,B ,C 为卫星三轴转动惯量;ωx ,ωy 及B x ,B y 分别为卫星角速度与地磁场强度矢量沿卫星本体系x ,y 轴的分量.该控制律不仅适用于轴对称卫星,对非轴对称卫星也有较好控制表现.O v c h i n n i Gk o v 等人[76,77],R o l d u gi n 与T e s t a n i [78]基于B Gd o t 提出了简化控制律,利用磁场导数信息即可完成章动阻尼:m z =-k (Be )e(17)该控制律可使用一轴磁力矩器完成控制.Z a v o l i 等人[79]分析了控制律(17)的具体性质,包括全局渐近收敛性质与自旋轴指向等.需要注意的是,由于该控制律所施加的控制力矩垂直于自旋轴,因此不能使卫星起旋.O v c h i n n i k o v 等人[76]提供了一种卫星起旋控制律:m =k (B y ,-B x ,0)(18)该控制律可产生沿自转轴方向的控制力矩,但同时会引入沿其他两轴的干扰力矩,需通过控制律(17)消除.针对自旋卫星起旋问题,T h o m s o n [80]提出了 Y GT h o m s o n 控制律,利用当前转速与目标转速差值对卫星转速进行控制.C r e a m e r [81]基于B Gd o t控制律提出了另一种自旋卫星控制方法,具体形式为:m =-k (B+ωd ˑB )(19)其中ωd 为卫星期望转速.该控制律可有效阻尼卫星初始角速度,使得卫星按照所设定角速度旋转.C u b a s 等人[82]对该控制律的稳定性,收敛时间,自转轴指向以及控制精度进行了详细分析,并在考虑实际工程限制条件下进行了仿真,验证了控制律的可靠性.可利用卫星当前角动量与目标角动量差值进行控制律设计.A v a n z i n i 等人[83]利用本体系与惯性系下的角动量差值,分别控制卫星角速度与自旋轴指向.此外,A v a n z i n i 等人[84]利用投影方法,即将角动量差值投影至与地磁场矢量垂直的平面,设计了另一种控制律:T =k (I -B B T )Δh (20)基于文献[57]的分析方法,文中提供了增益系数k 的选取方法.D eR u i t e r [85]同样利用投影方法,融合了章动阻尼㊁起旋以及自转轴指向等多个控制律,设计了应用于纳卫星的磁控方案.文中利用李雅普诺夫方法,证明了即使在两轴磁力矩器失效以及磁力矩器饱和等限制下,控制律也可保证渐进稳定.在考虑各种扰动以及设备故障等情况下,控制系统5动㊀力㊀学㊀与㊀控㊀制㊀学㊀报2024年第22卷表现均能满足任务需求[86].该控制律已被成功应用于纳卫星E S T C u b eG1[87].卫星可携带的能源有限,对于装备太阳能帆板的卫星,需尽快将电池板对准太阳.Y o u等人[88]基于投影方法提出了一种太阳获取控制律,具体形式如下:T=-k(ω-ωd),|l z|ɤ0.8-k(ω-ωd)-k1|L z|θ[lˑ(s ˑl)]-㊀k2s ˑe3,|l z|>0.8ìîíïïïï(21)其中L为卫星角动量,l为其单位矢量,k1,k2为相关增益系数,θ=a r c c o s(-s z),下标z表示该矢量沿本体系z轴的分量(z轴为其自旋轴).卫星首先进行角速度阻尼,然后切换至指向控制律,利用太阳敏感器读数实现太阳指向.C h a s s e t等人[89]介绍了太阳获取控制律在具体卫星任务中的应用.利用太阳矢量与卫星本体系z轴夹角以及目标转速,文中构建了包含指向信息与转速信息的目标转速,通过投影方法实现了太阳获取.A l f r i e n d[90]利用地磁场信息以及卫星滚转角构建闭环控制律:m2=k1B xφ-k2B y(22)其中φ为1G2G3转序下相对于轨道坐标系的卫星滚转角.使用多时间尺度方法,文中对控制律的渐进稳定性进行了分析,通过与数值仿真以及F l oGq u e t理论对比,对控制律进行了验证.同时,文中分析了控制律对干扰力矩的鲁棒性.W h e e l e r[91]使用沿自旋轴方向的单轴磁线圈,利用卫星姿态㊁角速度与磁场信息构建反馈函数,实现了卫星稳定控制.O v c h i n n i k o v与R o l d u g i n[92]使用单轴磁力矩器,设计了可使小卫星在轨道平面内任意方向旋转的控制律.E r g i n与W h e e l e r[93]利用卫星姿态误差与地磁场信息,使用固定时间间隔内的恒定控制力矩设计了磁控制律.R e n a r d[94]比较了在轨道偏心率,地球自转等影响下,仅使用沿自旋轴方向单轴磁线圈,不同控制律的表现.结果表明,基于轨道周期进行磁矩极性转换可实现较好鲁棒性.C h e o n等人[95]利用星载地磁场模型,设计了仅使用磁强计与G P S信息的磁控制律,其具体形式为:m=1|b m|[-12Kb^p-D(b^ p-b^ m)-㊀Λd(ω~z-Ψz)(b^mˑe)](23)其中b m为磁强计测量的磁场矢量;K,D为正定增益矩阵;Λd为矩阵D对角元素;ω~z为通过磁强计测量值估计得到的当前卫星沿自转轴方向角速度,Ψz为目标角速度;上标 ^ 表示该矢量的单位矢量;b p为通过特殊优化方法得到的期望磁场矢量,其具体计算方式如下.通过星载磁场模型,计算出当卫星达到目标姿态时地磁场矢量在本体系下所有可能的表示,这些矢量在空间中构成一个圆锥,而b p则是圆锥与b m㊁e所确定平面的交线.控制律通过减小b p与b m之间夹角,使得卫星自旋轴指向目标方向.文中使用线性估计模型与李雅普诺夫方法对控制律稳定性进行了分析,通过仿真验证了控制律的可行性.需要注意的是,只有当卫星自旋速度足够大时,该控制律才可保证卫星稳定控制.J u n k i n s等人[96]基于庞特里亚金最值原理,给出了控制自旋轴指向的时间最优机动设计方法.S o r e n s e n[97]使用L Q R方法对所需磁矩进行设计.自旋卫星磁控制律时至今日仍在推陈出新[98,99].但自旋卫星的高速旋转特性不利于实施优化方法,同时相关研究也较为成熟,难以实现大突破.3.2.2㊀磁控与定转速飞轮结合当一轴飞轮以一定转速旋转时,会为卫星提供陀螺稳定性,使飞轮轴向保持在轨道法向方向,该类卫星称为偏置动量卫星.此类卫星无需高速旋转,降低了设备及卫星惯量要求.加入磁控可进一步提高偏置动量卫星控制精度,使卫星姿态误差渐近收敛.由于飞轮在轨道法向提供了足够的稳定性,磁控偏置动量卫星甚至可在赤道轨道实现稳定控制.偏置动量卫星也需进行章动阻尼.S t i c k l e r与A l f r i e n d[19]使用控制律(22)进行章动与进动控制.G o e l与R a j a r a m[100]对该控制律进行改进,应用于近赤道轨道卫星,并给出了时间响应表达式.H aGb l a n i[101]改进了控制律(22),提供了增益系数选取方法.同时,H a b l a n i[102]还考虑了非圆轨道下章动与进动控制,给出了控制律进一步改进形式.P u l e cGc h i等人[103]对H a b l a n i改进的控制律进行了详细的性能分析.T s u c h i y a与I n o u e[104]在控制律中添加积分项,提高了控制力对干扰力矩的鲁棒性.6第1期穆硕等:卫星磁姿态控制方法与算法综述P D 控制是偏置动量卫星常用的磁姿态控制方案之一.其基本形式为[105]:m =B ˑ(-k ωωe -k q q ңe ) B 2(24)其中k ω与k q 为增益矩阵,ωe 为误差角速度,q ңe 为误差四元数矢量部分.Z h a n g 等人[106]利用滚转与偏航两轴P D 控制及俯仰轴飞轮实现了小卫星稳定控制.同时,通过调节增益系数,文中对收敛时间及控制误差进行了优化.D o r o s h i n [107,108]研究了偏置动量卫星在控制律m =k ω(25)下的运动问题.O v c h i n n i k o v 等人[16]提出了可使卫星在轨道平面内实现任意指向的磁控制律,具体形式为:T =0k s i n (α0-α)-k s i n (α0-α)B y B z éëêêùûúú(26)其中α为3G1G2转序下第一个姿态角,α0为其目标值.文中分析了重力梯度力矩干扰下卫星的运动,并给了运动形式.W a n g 与Sh t e s s e l [109]基于滑模控制提出了偏置动量卫星磁控制律.通过解耦俯仰轴运动方程,设计了针对滚转偏航轴及俯仰轴两种滑模控制律,通过开关转换函数,实现了b a n g Gb a n g 控制.基于L Q R 方法的优化方案也可用于偏置动量卫星控制律设计.早在1993年,P i t t e l k a u[110]就基于L Q R 方法,提出了针对极轨道卫星的最优控制律.文中建立了干扰力矩周期模型,通过求解R i c Gc a t i 方程得到了最优控制增益.此后,L a gr a s t a 与B o r d i n [111]同样使用L Q R 方法设计了磁控制律,该控制律可抵抗恒定干扰力矩.G u e l m a n 等人[112]介绍了应用于小卫星G u r w i n GT e c h S A T 的优化控制律.同时,文中提到了一种类似于控制律(22)的b a n g Gb a n g 控制,具体形式为m =-k 1(Bm e a s -Be x p )-k 2(B m e a s -B e x p )(27)其中B m e a s 与B e x p 分别为磁强计测量与星载磁场模型计算得到的地磁场强度矢量.P u l e c c h i 等人[113]提出了适用于星载计算机的离散L Q R 方法.偏置动量卫星磁控制律的另一种优化方法为H 2与H ɕ方法.W i s ᶄn i e w s k i [114]等人使用H 2方法设计了小卫星磁控制律,T r égo u ët [115]等人将H 2方法应用于偏置动量卫星.H ɕ方法则可提高控制律对干扰力矩及参数不确定性等因素[116G118]的鲁棒性.偏置动量卫星的陀螺稳定性质克服了磁控固有缺陷,同时其设备简单,控制精度高,自上个世纪以来应用广泛,并不断与新技术融合[119G122].后续关于磁控偏置动量卫星的研究会多集中于优化方法应用,如时间最优机动方案设计等.但偏置动量轮体积较大,应用于纳卫星,皮卫星等存在一定局限性,需做进一步研究.3.2.3㊀磁控与重力梯度力矩结合重力梯度力矩也可为卫星提供被动稳定.通过重力梯度杆等装置,地球重力可为卫星提供一轴稳定力矩.该方式在上个世纪卫星任务中应用广泛.同时,为防止卫星绕重力梯度杆旋转等,需利用磁力矩对卫星进行姿态控制.M a r t e l 等人[123]将主动磁姿态控制应用于重力梯度卫星,解决了卫星重力梯度杆稳定指向及热量处理问题.文中提出了两种主动磁控制律.控制律(27)在姿态获取阶段进行角速度阻尼控制.三轴稳定控制阶段则采用P D 控制,通过投影方法,实现高精度稳定.G r a s s i [124]同样利用控制律(27)及基于误差矢量e ң的P D 控制实现了重力梯度小卫星稳定控制,其P D 误差控制律为:m =k 1e ң+k 2eң(28)同时,文中还设计了控制律(27)的实施阈值,即当误差大于一定阈值时该控制律才会施加于卫星,以防止卫星因仪器测量与执行误差在平衡点附近发生摆动.L o v e r a 与A s t o l f i [125]证明了P D 控制律的稳定性.同时,基于磁场平均化理论以及小角速度假设,L o v e r a 与A s t o l f i [125]证明了P D 控制可指数收敛.通常控制律得到的理想控制力矩T d 会使用投影方法计算所需磁矩m .此时施加于卫星的实际力矩T 根据式(1)进行计算.由于T 须垂直于地磁场矢量,因此与理想控制力矩T d 存在一定误差.A r Gd u i n i 与B a i o c c o [126]针对重力梯度卫星,提出了两种可使T d 与T 误差最小化的方法.其中一种是最小化二者欧拉二范数,另一种则是使T 两轴分量与T d 一致,在满足T 垂直于地磁场矢量的限制下,设计其第三轴力矩分量.B a k 等人[127]基于滑模控制提出了姿态阻尼控7。
插座的emc标准
插座的emc标准EMC的分类及标准:EMC(Electromagnetic Compatibility)是电磁兼容,它包括EMI(电磁骚扰)和EMS(电磁抗骚扰)。
EMC定义为:设备或系统在其电磁环境中能正常工作且不对该环境中的任何设备的任何事物构成不能承受的电磁骚扰的能力。
EMC整的称呼为电磁兼容。
EMP是指电磁脉冲。
EMC = EMI + EMS EMI : 電磁干擾EMS : 電磁相容性(免疫力)EMI可分为传导Conduction及辐射Radiation两部分,Conduction规范一般可分为: FCC Part 15J Class B;CISPR 22(EN55022, EN61000-3-2,EN61000-3-3) Class B;国标IT类(GB9254,GB17625)和AV类(GB13837,GB17625)。
FCC测试频率在450K-30MHz,CISPR 22测试频率在150K--30MHz,Conduction可以用频谱分析仪测试,Radiation则必须到专门的实验室测试。
EN55022为Radiation Test & Conduction Test (传导& 辐射测试);EN61000-3-2为Harmonic Test (电源谐波测试) ;EN61000-3-3为Flicker Test (电压变动测试)。
CISPR22(Comite Special des Purturbations Radioelectrique)应用于信息技术类装置, 适用于欧洲和亚洲地区;EN55022为欧洲标准,FCC Part 15 (Federal Communications Commission) 适用于美国,EN30220欧洲EMI测试标准,功率辐射测试标准是EN55013频率在30MHZ-300MHz。
EN55011辐射测试标准是:有的频率段要求较高,有的频率段要求较低。
UB2000-F42-I-V15超声波传感器技术参数

一般规格 检测范围 调整范围 盲区 标准靶板 换能器频率 响应延迟
60 ... 2000 毫米 90 ... 2000 毫米 0 ... 60 毫米 100 毫米 x 100 毫米 约。175 千赫 约。150 毫秒
指示灯/操作手段 LED 绿色 LED 黄色
LED 红色
绿色常亮:上电
固体:对象在评价范围 闪烁:程序功能
文件名称 安装援助 安装援助 过程控制和指示设备 母接头 母接头
住房 传感器 块
1 级:+4 V. .. + U 乙 输入阻抗:> 12 千欧 同步脉冲:≥100 微秒,同步脉冲间期:≥2 毫秒
最大。30 赫兹 ≤30 赫兹/ N,N =传感器数量
1 个模拟输出 4 ... 20 毫安 评价极限值 A1:90 毫米,评估限制 A2:2000 毫米,宽声瓣 0.7 毫米 满刻度值的±1% 满刻度值的±0.1% 0 ... 300 欧姆 满刻度值的±1%
语言 所有
文件类型 PDF
文件大小 154 KB 返回顶部
CAD + CAE:UB2000-F42-I-V15 CAD 3D Modell/3D 模型 3D Modell/3D 模型
文件类型 I
返回顶部
认证+证书:UB2000-F42-I-V15 证书 美国加利福尼亚州 UL 通用 欧洲倍加福 2004/108/EC(EMC)符合性声明 美国加利福尼亚州 CSA
产品类别总览 产品样本 按产品特性搜索 浏览所有产品类别
客服信息
联系客服
模拟输出 4 毫安... 20 毫安
的极端小的盲区
TEACH-IN
电气符号缩写

电气符号缩写A 安培或正极a.c. 交流电a.f. 声频a.f.c. 自动频率控制a.g.c. 自动增益控制a.m. 振幅调制A.S.A. 美国标准协会a.t.u. 天线调谐装置a.v.c. 自动音量控制A/D 模拟到数字A/F 对边宽度–螺母/螺钉等的宽度abs 绝对ABS 丙烯腈丁二烯苯乙烯共聚物ACK 确认ADC 数字转换器模拟ADSL 不对称数字用户线路Ae 航空Ag 银(化学符号)Ah 安培小时Al 铝(化学符号)amp 安培ANSI 美国国家标准协会Ar 氩(化学符号)ARCNet 附加计算机网络资源As 砷(化学符号ASCII 美国信息交换用标准ASK 振幅偏移键控法ASTA 短路测试授权协会ASTM 美国材料与试验协会ATE 自动测试装置atm 大气层ATM 异步传输方式Au 金(化学符号)AUI 附加装置接口(15路‘D’连接器)AUX 辅助设备AV 音频视频AWG 美国线规AWM 适用配线材料b 晶体管的基极b.p.s. 波特率BA 英国协会(螺纹型号)BAF 化合的醋酸纤维BASEC 英国电缆认证服务BASEEFA 英国可燃电气设备认证Be 铍(化学符号)BEAB 英国电子技术批核委员会BFA 英国音频联盟BGA 球状网格阵列BMP 位图BNC 尼尔-康塞曼插刀(同轴连接器,以发明者命名)BP? 散装bpm 每分钟的传播数BPO 英国邮政局BR 低音反射作用BS 英国标准BSI 英国标准协会BSP 英国标准管(螺纹型号)BSPT BSP锥螺纹btu 英国热量单位C 电容器,负极,摄氏温度的,摄式,库仑c 晶体管收集器,光速,百分之一cable 电缆CAD 计算机辅助设计CAM 计算机辅助制造CAT 种类CB 民用波段(无线电)cc? 立方厘米CCD 电荷耦合装置CCITT 国际电报和电信顾问委员会(法国简写)CCTV 闭路电视cd 坎德拉CD 光盘CDM 施工设计及管理(规定)CENELEC 欧洲标准化委员会CERDIP 双列直插式陶瓷封装CETOP 欧洲传送委员会CFC 碳氟化合物cfm 每分钟立方尺CHIP 化学危害品信息chps 每秒的字符Chr 字符CIM 计算机集成制造CLK 时钟信号CMA 电缆制造商协会CMOS 互补的金属氧化物半导体CNC 计算机数值控制cNm 百分之一牛顿米Co-ax 同轴(共享同一根轴)col 列COM 通信端口COS? 余弦COSHH 有害于健康的物品的控制 (法规) cpi 每英寸的字符cps 每秒的字符CPU 中央处理器Cr 铭CrO2 二氧化铭CSA 加拿大标准协会csa 横截面积CSP 聚乙烯cSt 粘度值CTD 电荷转移装置CTFE 三氟氯乙烯Cu 铜D 二极管d F.E.T 消耗d.c. 直流电D/A 数字到模拟DAC 数字到模拟转换器daN 10牛顿DAP 苯二酸二烯丙酯dB 分贝DCC 双接触DCE 数据电路终接设备DEC 数字设备DEF STAN 英国标准防御DEG 度DES 数据加密标准DF 方位测定Dia. 直径DIL 双列直插式DIMM 双列直插式内存模块DIN 德国工业标准DIP 双列直插式封装DMA 直接存储器存取DMM 数字万用表DOL 直达电路DPCO 双极转换-接触面排列DPDT 双刀双掷dpi 每英尺的点DPM 数字式电表DPST 双刀单掷DTE 数据终端设备DTL 二极晶体管DTMF 双音多频DVM 数字电压表DX 远距离接收器e 发射极晶体管e.h.t. 超高电压(伏特)e.m.f. 电动势EAROM 电子式可改写只读存储器ECC 接地线ECL 发射器耦合逻辑ECR 电子收银机EEPROM 电子式可抹除可编程只读存储器EGA 增强的图形适配器EIA 电子行业联盟EISA 扩展工业标准结构EMC 电磁兼容性EMI 电磁冲突EMP 电磁脉冲EN 欧洲标准EPDM 三元乙丙橡胶EPOS 电子销售点EPR? 乙烯丙烯橡胶EPROM 可擦写可编程且可读存储器EQ 均衡EROM 可擦写且可读存储器ERP 有效辐射功率ESD 释放静电EVA 乙烯-醋酸乙烯共聚物,乙烯-乙烯醇共聚物EXP 指数F 法拉,华氏或力f 频率F.C. 固定居中f.e.t. 场效应晶体管f.m. 频率调制f.r. 频率响应或射程f.s.d. 满标偏转f.s.k. 频移键控FBLT 光纤限弯软管FCC 联邦通信委员会FDA 联邦药品管理局FDDI 光纤分布式数据界面Fe 铁FeCr 铁镍合金FEP 乙烯乙基醇FFC 扁形软性电缆FRP 阻燃聚乙烯FTP 文件传送协议FTP 经焊盘筛选的双扭线G 千兆(10克)g 栅极,重力常数,克(质量单位)G 平行线程GHz 千兆赫兹GIF 图形交换格式GLS 通用照明GM 盖革-米勒(珈玛射线检测器GOST 俄国标准gr? 晶粒(质量单位)GRP 玻璃干扰塑料H 亨利h 小时h.f. 高频率HBC 高断流容量HCFC 含氯氟碳氢化合物HDPE 高密度聚乙烯HEX 六角形Hg 水银HOFR 耐热,耐油,阻燃剂hr 小时HRC 强破坏性功率HRC 洛克硬度HSE 健康及安全执行委员会HSS 高速钢HT? 强拉力HTML 超文本标记语言HVAC 加热,通风以及空调Hz 赫兹(每秒周数)I 电流i.c. 集成电路i.m.d. 内部调制失真i.p.s. 每秒英寸数I/O 输入/输出i/p 输入I/P 电压转换器的电流IL (IIL) 集成注入逻辑电路IB 无限反射板ID 特性IDC 绝缘体置换连接器IDT 绝缘置换技术IEC 国际电子技术委员会IEE 英国电子工程师协会IEEE 美国电气与电子工程师协会IF 中频IMQ 意大利国家测试与质量认证机构in 英寸(长度单位)in wg 英寸水表IP 进口保护(IEC标准)IPA 异丙醇酒精ISA 工业标准体系结构ISDN 综合服务数字网络ISO 国际标准化组织ITU 国际电信同盟J? 焦耳JEDEC 电子防护工程委员会JEIDA 日本电子工业发展协会JIS 日本工业标准调查会JPEG 联合图像专家组k 千(103)负极K 千,按信息处理技术(= 210=1024)或绝对温度K 绝对温标KEMA 荷兰测试机构kg 公克kv/mm 每毫米一千伏特(电介质强度)L 电感或电流l.e.d. 发光二极管l.f. 低频l.w. 长波(大约1100-2000M)l/m? 每分钟升数L/min 每分钟升数l/s 每秒升数LAN 本地局域网lb 磅(重量单位)lbf? 磅力lbf in 每英寸的压力磅LCD 液晶显示器LDPE 低密度聚乙烯LIN 行LOG 对数LS 扬声器LSF 低卤低烟LSI 大规模集成电路LSOH 无卤低烟LVD? 低电压指令LVDT 线性差动变压器M 兆(106)m 千分之一(10-3)或者米m 米m.c. 移动线圈m.w. 中波(大约185-560M)mA 毫米mAh 千分之一安培小时MAN 城域网Mb 兆字节Mbits/sec 每秒兆位(每秒百万比特)MCA 微通道体系结构MCB 微型断路器mcd 毫堪德拉MCSD 微软认证的解决方案开发专家MCSE 微软认证的系统工程师MF 三聚氰胺甲醛MFD 微法MHz 兆赫MI 音乐设备mic 传声器MIC 绝缘电缆MIDI 乐器数字化接口MIG 惰性气体金属Mil 长度单位, 0.001英寸MIL STD 军用标准ml 毫升mm wg 毫米水表MMJ 6芯的变化版本MOD 国防部MOS 金属氧化物半导体MOV 金属氧化物变阻器MPEG 动态图像专家组MPU 微处理器MPX 多路复用MSCP 平均球面光强度MTA 大批装配终止MUSA 多单元方向性可控天线mV 毫伏特mW 毫瓦特n 毫微 (10 - 9)N 牛顿n/c 未连接;正常闭路n/o 正常通路Na? 钠NAMAS 国家计量认可服务处NASA 美国国家航空和宇宙航行局NATO 北大西洋条约组织Ncm 牛顿平方NEC 美国国家电工法NEMA 美国电气制造商协会NEMKO 挪威电气设备检验批准委员会NFPA 美国消防协会Ni 镍NIC? 网卡Ni-Cad 镍-镉NICAM 近似瞬间多路音频压缩扩展器NiMH 镍-金属氧化物Nm 牛顿米NMOS 负极通道金属氧化物半导体NOS 牛顿操作系统NPN 负极,正极,负极(晶体管)ns 毫微秒ns/m 每米毫微秒NTC 负极温度系数NTSC 美国国家电视系统委员会NVP 额定传输速度o.d. 外径o/c 明渠;通路o/p 输出OEM 原始设备制造商OFC 无氧铜OFTEL 电信管制局OHP 投影仪OHT 投影片op-amp 运算放大器OTDR 光时域反射计OVE 奥地利电气标准p 微微(10 - 12)p.a.m. 脉冲振幅调制p.r.f. 脉冲重复频率PA 公共地址PA 多聚醯胺(尼龙)PABX 私人自动交换分机PAL 逐行倒相PAL 逐行倒相PAT 便携测试器PBT 多聚丁烯苯二甲酸酯PBX 专用电话交换机PC 多聚碳酸盐pc 块PCB 印刷电路板pce 块PCI 周边零件连接界面PCM 脉冲编码调制PCMCIA 国际个人计算机记忆卡协会PCP 聚氯丁烯(氯丁(二烯)橡胶)PCTFE 聚三氟氯乙烯PCW 纯铜丝Pd 钯PDF 便携文件格式PE 聚乙烯pF 皮可法拉pF/m 每米皮可法拉PG? 带螺纹的套管pH 氢离子浓度PICMG PCI工业计算机制造商组织PIDG 预绝缘的金刚石型把手PLA 可编程的逻辑阵列PLC 可编程的逻辑控制器PLL 锁相环PMOS 正极金属氧化半导体PNG 便携式网络图片PNP 正极,负极,正极晶体管POS 销售点PP? 聚丙烯ppm 百万分之一PPO 聚苯氧化物PROM 可编程只读存储器PRT 铂电阻温度测定法PS 聚苯乙烯PSI 每平方英寸的磅数PSS 数据分组PSTN 公共电信交换网络PSU 能源功率单位Pt 铂Pt100 铂温度传感器PTB 德国测试机构PTC 正温度系数PTFE 多聚四氟乙烯PU 传感器PUJT 可编程序单结晶体管PUR 聚氨酯PVC 多聚氯乙烯PVDF 乙烯基树脂PWM 脉冲幅度调制Q 质量因素,调谐电路的效率,充电QA 质量保证QFP 四方扁平封装R 电阻r.f. 射频r.f.c. 射频抗流r.m.s. 均方根值R/A 直角(90度)R/W 读/写RAD 弧度RAM 随机存储器RCA 美国无线电公司RCD 漏电保护器RCF 推荐转线器频率RFI 无线电频率干扰RG 无线电级别(电缆)RIAA 美国唱片工业协会RIDDOR 关于危害,疾病以及危险事故的报告RJ 注册的插座RMA 低活性松香ROM 只读存储器rpm 每分钟转数RSJ 轧制钢托梁RTC 带versa模块的欧洲板RTC 实时时钟RTL 电阻晶体管逻辑RX 接受方S 西门子S F.E.T.的来源s 秒(时间单位)s.h.f. 超高频率s.w. 短波(大约10-60cm)s.w.g. 标准线规s.w.r. 驻波比率s/c 短路S/N 信噪比SAE 汽车工程师学会SCART 标准视频接口SCR 硅控整流器SCSI 小型计算机系统接口SEMKO 瑞典政府核准之强制安规发证单位SEV 瑞士电器标准SI 国际单位制SIM 用户识别模块SIMM 单列直插式内存模块SIN 正弦SMA 微型A(同轴连接器)SMB 微型B(同轴连接器)SMC 微型C(同轴连接器)SMD 表面安装设备SMT 表面安装技术SNA 系统网络体系结构SNMP 简单网络管理协议SOD 小型轮廓封装设备SOIC 小型轮廓封装集成电路SOT 小型轮廓封装晶体管SPDT 单极,双闸SPL 声压标准spm 每分钟行程次数SPST 单极,单闸SSI 小范围集成STP 屏幕双绞电缆SVGA 超级视频图像适配器SWA 细钢丝铠装SWL 安全工作合载T 特斯拉t.r.f. 调谐无线电频率TACW 镀锡金属韧铜丝TAN 切线TC 商业柜台TCP/IP 传输控制协议/网际协议TCW 镀锡金属韧铜丝TDM 时分复用TDR 时域反射计(阻抗失配的脉冲回波)TFE 四氟丁烯TIA 通信工业协会TIF 影像文件TNC Threaded Neill-Concelman(同轴连接器,以发明者命名)TPE 热塑性弹形体TPI 每英寸线程数TPI 每英寸磁道数TPI 每英寸牙数TQM 整体质量管理TR 变压器TTL 晶体管逻辑TWA 平均时量TX 发射器UART 通用异步收发器mH? 微亨利mH/m? 每米微亨利数U 19英寸高度单位,(1.75英寸/ 44.45毫米)u.h.f. 超高频率(接近470-854 MHzu.j.t. 单结晶体管UF 尿素甲醛UL? Underwriters实验室ULA 自由逻辑阵列UNC 统一标准的粗牙螺纹UNF 统一标准的细牙螺纹USB 通用串行总线UTP 无屏蔽的双绞电缆UV 紫外线V 伏特VA 伏特-安培v.c.a. 电压控制放大器v.c.o. 电压控制震荡器VCT 电压到电流服务器v.h.f. 超高频(接近88-216 MHz)v.l.f. 超低频VU 音量单位VGA 图像图形阵列VDE 德国电气工程师协会VHS 录像视频系统VSWR 电压驻波比VESA 视频电子标准协会.VDU 真观显示设备VME Versa欧洲板模块VCR 录像机VOC 挥发性有机化合物W 瓦特w.p.m. 每分钟的字数W/F 转速不均性W/m 每米的瓦特WAN 广域网Wb 韦伯WDM 密集波分复用WG 水表WKG 运行中WYSIWYG 您只能接受事实X 电抗XLPE 交联聚乙烯Z 阻抗ZD 齐纳二极管ZIF 零拨插力式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
翔京联合传感器有限公司技术资料
内螺纹连接器 V15-G-15M-PUR
•
滚花螺母适用于安装
•
对振动不敏感,带机械闭锁
•
镀金触点
•
防护等级 IP67/IP68/IP69K
•
无卤素
•
适用于 2,3 和 4 线制
参数表节选:的技术参数 V15-G-15M-PUR
产品阐述
内螺纹线组,M12,5 针,PUR 电缆
工业传感器》产品连接器》电源线》分线器》传感器接插件
污染程度 机械特性 接触原理
3
翔京联合传感器有限公司技术资料
弹簧型插座
针直径
1 mm
防护等级
IP67/IP68/IP69k
材料
接触体
铜锌/金
接触面
金
柄
TPU,黑色
电缆
PUR
开槽螺母
镀锌性
外壳直径
Ø 4,8 mm
弯曲半径
> 10 x 电缆直径,移动
工业传感器》产品连接器》电源线》分线器》传感器接插件
颜色 芯数 导线截面积 导体结构 长度 可燃性 连接材料 外壳
> 8 倍电缆直径,柔性 灰色 5 0,34 mm2 19 x 0,15 mm Ø 15 m
翔京联合传感器有限公司技术资料
一般特性
针脚数
5
接口 1
插座
工业传感器》产品连接器》电源线》分线器》传感器接插件
接口设计 1
直的
翔京联合传感器有限公司技术资料
线缆末端 1
M12
接口 2 电气特性 工作电压
电缆尾部没有东西 最大 60 V AC/DC
工作电流
最大 4A
体积电阻
< 5 mΩ
与标准和规范体系的一致性
符合标准
防护等级
EN 60529:2000
标准
IEC 61076-2-101:2008 测试电压为 500 VDC
可燃性 周围环境 环境温度
把手:UL 94
柄: -40 ... 90 °C (-40 ... 194 °F) 电缆,固定式: -40 ... 80 °C (-40 ... 176 °F) 电缆,弯曲式: -30 ... 80 °C (-22 ... 176 °F)
HB V-2
工业传感器》产品连接器》电源线》分线器》传感器接插件