元胞自动机模型程序
元胞自动机算法

元胞自动机算法元胞自动机算法,简称CA(Cellular Automaton),是一种在离散空间中由简单规则驱动的计算模型。
CA算法的核心思想是将空间划分为离散的小区域,每个小区域称为一个元胞,每个元胞根据一定的规则与相邻元胞进行交互和演化。
CA算法的应用非常广泛,涵盖了物理、生物、社会等多个领域。
让我们来看一个简单的例子,以帮助理解CA算法的基本概念。
假设我们有一个一维的元胞空间,每个元胞只能处于两种状态之一:活跃或者不活跃。
我们以时间为轴,每一个时间步骤都会根据一定的规则更新元胞的状态。
假设规则是:如果一个元胞以及它的两个相邻元胞中,有两个元胞是活跃的,那么该元胞在下一个时间步骤中将变为活跃状态;否则,该元胞将变为不活跃状态。
通过多次迭代,我们可以观察到整个元胞空间的状态发生了变化。
初始时,只有少数几个元胞是活跃的,但随着时间的推移,越来越多的元胞变为活跃状态,形成了一种规律性的分布。
这种分布不断演化,直到达到一种平衡状态,其中的活跃元胞的分布不再发生变化。
这个简单的例子展示了CA算法的基本特征,即简单的局部规则可以产生复杂的全局行为。
在CA算法中,每个元胞的状态更新是基于其周围元胞的状态而确定的,这种局部的交互最终导致了整个系统的全局行为。
除了一维元胞空间,CA算法还可以应用于二维和三维空间。
在二维元胞空间中,每个元胞有更多的邻居,例如上下左右以及斜对角线方向的邻居。
同样地,每个元胞的状态更新规则也可以根据其周围元胞的状态而确定。
CA算法在生物学中有广泛的应用,例如模拟细胞分裂、生物群落的演化等。
在社会学中,CA算法可以用于模拟人群的行为,例如交通流量的模拟、城市规划等。
此外,CA算法还可以用于物理学中的模拟,例如模拟固体的晶体结构等。
总结一下,元胞自动机算法是一种基于简单规则的计算模型,通过元胞之间的局部交互和状态更新,产生复杂的全局行为。
这种算法广泛应用于不同领域,能够模拟和研究各种现象和问题。
元胞自动机程序摘要
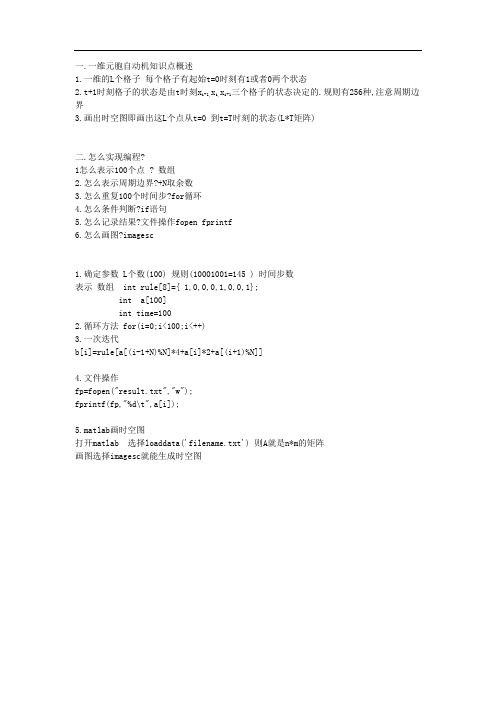
一.一维元胞自动机知识点概述
1.一维的L个格子每个格子有起始t=0时刻有1或者0两个状态
2.t+1时刻格子的状态是由t时刻x i-1,x i,x i+1三个格子的状态决定的.规则有256种,注意周期边界
3.画出时空图即画出这L个点从t=0 到t=T时刻的状态(L*T矩阵)
二.怎么实现编程?
1怎么表示100个点? 数组
2.怎么表示周期边界?+N取余数
3.怎么重复100个时间步?for循环
4.怎么条件判断?if语句
5.怎么记录结果?文件操作fopen fprintf
6.怎么画图?imagesc
1.确定参数L个数(100) 规则(10001001=145 ) 时间步数
表示数组int rule[8]={ 1,0,0,0,1,0,0,1};
int a[100]
int time=100
2.循环方法for(i=0;i<100;i<++)
3.一次迭代
b[i]=rule[a[(i-1+N)%N]*4+a[i]*2+a[(i+1)%N]]
4.文件操作
fp=fopen("result.txt","w");
fprintf(fp,"%d\t",a[i]);
5.matlab画时空图
打开matlab 选择loaddata('filename.txt') 则A就是n*m的矩阵
画图选择imagesc就能生成时空图。
元胞自动机

除了格子气元胞自动机在流体力学上的成功应用。元胞自动机还应用于磁场、电场等场的模拟,以及热扩散、 热传导和机械波的模拟。另外。元胞自动机还用来模拟雪花等枝晶的形成。
元胞自动机可用来通过模拟原子、分子等各种微观粒子在化学反应中的相互作用,而研究化学反应的过程。 例如李才伟 (1997)应用元胞自动机模型成功模拟了由耗散结构创始人I·Prgogine所领导的Brussel学派提出 的自催化模型---Brusselator模型,又称为三分子模型。Y·BarYam等人利用元胞自动机模型构造了高分子的聚 合过程模拟模型,在环境科学上,有人应用元胞自动机来模拟海上石油泄露后的油污扩散、工厂周围废水、废气 的扩散等过程的模拟。
元胞自动机
格动力学模型
01 基本介绍
03 具体解释 05 应用
目录
02 通俗解释 04 分别描述
元胞自动机(cellular automata,CA)是一种时间、空间、状态都离散,空间相互作用和时间因果关系为局 部的格动力学模型,具有模拟复杂系统时空演化过程的能力。
基本介绍
不同于一般的动力学模型,元胞自动机不是由严格定义的物理方程或函数确定,而是用一系列模型构造的规 则构成。凡是满足这些规则的模型都可以算作是元胞自动机模型。因此,元胞自动机是一类模型的总称,或者说 是一个方法框架。其特点是时间、空间、状态都离散,每个变量只取有限多个状态,且其状态改变的规则在时间 和空间上都是局部的。
元胞自动机用于兔子-草,鲨鱼-小鱼等生态动态变化过程的模拟,展示出令人满意的动态效果;元胞自动机 还成功地应用于蚂蚁、大雁、鱼类洄游等动物的群体行为的模拟;另外,基于元胞自动机模型的生物群落的扩散 模拟也是当前的一个应用热点。在信息学中。元胞自动机用于研究信息的保存、传递、扩散的过程。另外。 Deutsch(1972)、Sternberg(1980)和Rosenfeld(1979)等人还将二维元胞自动机应用到图像处理和模式识别 中 (WoIfram.S.,1983)。
元胞自动机模型步骤
元胞自动机模型是一种模拟系统行为的离散模型,其中每个元素被称为元胞,它们遵循一组规则进行状态转移。
以下是构建元胞自动机模型的步骤:1.确定元胞空间首先,确定元胞的空间布局。
元胞空间通常是一个网格,元胞在网格中的位置可以用行和列的坐标表示。
根据问题的具体需求,可以选择不同大小的网格和元胞数量。
2.定义状态转移规则接下来,需要定义元胞的状态转移规则。
每个元胞的状态在一定时间步会根据一组规则进行更新。
这些规则通常包括相邻元胞的状态以及当前元胞的状态,它们共同决定了下一个状态。
例如,在“康威生命游戏”中,每个元胞的存活、死亡或繁殖取决于相邻元胞的状态。
3.初始化元胞状态在开始模拟之前,需要初始化元胞的状态。
这通常是一个随机过程,但也可以根据特定的问题背景进行初始化。
每个元胞都被赋予一个初始状态,这些状态在后续的迭代中会发生变化。
4.迭代更新状态迭代更新状态是模型的核心步骤,它涉及根据定义的规则将每个元胞从当前状态转移到下一个状态。
通常使用循环或递归实现这个步骤,每次迭代都根据当前状态计算下一个状态。
迭代过程中,可以记录下每个元胞的历史状态,以便后续分析。
5.分析结果最后,根据模型的实际应用,可以对结果进行分析。
例如,如果模型用于模拟生物群体的演化,可以观察不同时间步的群体结构变化;如果用于模拟交通流,可以分析交通拥堵的形成和传播。
此外,还可以通过可视化工具展示元胞自动机模型的状态演化过程。
总之,元胞自动机模型是一种强大的工具,可用于模拟各种复杂系统的行为。
通过以上步骤,可以构建出具有不同应用背景的元胞自动机模型,并通过迭代更新状态和分析结果来揭示系统的内在规律。
元胞自动机 python 枝晶
元胞自动机 python 枝晶元胞自动机(Cellular Automaton)是一种离散空间和时间的数学模型,它由一系列相同的元胞组成,每个元胞都有自己的状态,并通过一组规则与相邻元胞进行交互。
本文将以Python编写一个枝晶的元胞自动机模拟程序,并详细介绍其原理和实现过程。
一、枝晶的定义枝晶是一种生物现象,通常指植物的分枝生长。
枝晶的形态多样,可以呈现出分枝、叶片等特征。
在元胞自动机中,我们可以使用简化的模型来模拟枝晶的生长过程。
二、元胞自动机模型在枝晶的元胞自动机模型中,我们将空间划分为一个二维的方格网格,每个方格被称为一个元胞。
每个元胞可以处于不同的状态,代表不同的细胞类型或状态。
三、枝晶的生长规则枝晶的生长过程受到一定的规则限制,这些规则可以通过元胞自动机的状态转换函数来实现。
在我们的模型中,我们将使用Moore 邻居方式,即每个元胞的八个相邻元胞都会影响它的状态转换。
四、程序实现我们需要导入必要的库,包括numpy和matplotlib。
然后,我们可以定义一个二维的数组来表示元胞空间,并初始化每个元胞的初始状态。
接下来,我们可以编写一个函数来更新元胞的状态。
在每一次迭代中,我们会遍历整个元胞空间,并根据生长规则来更新每个元胞的状态。
这里我们可以使用numpy的数组操作来提高效率。
我们可以使用matplotlib库来可视化元胞的状态。
我们可以将元胞空间中不同状态的元胞用不同的颜色来表示,从而呈现出枝晶的生长过程。
五、实验结果经过多次迭代,我们可以观察到元胞空间中枝晶的生长过程。
初始时,只有少数几个元胞处于活跃状态,随着迭代的进行,这些活跃的元胞会逐渐扩散并形成分枝。
最终,整个元胞空间将被枝晶所覆盖。
六、总结通过本文,我们使用Python编写了一个枝晶的元胞自动机模拟程序,并详细介绍了其原理和实现过程。
元胞自动机是一种强大的工具,可以用来模拟各种复杂的生物现象和物理过程。
通过不断调整生长规则和初始状态,我们可以观察到不同形态的枝晶在元胞空间中的生长和演化。
元胞自动机matlab
元胞自动机matlab
元胞自动机(Cellular Automaton)是一种离散的数学模型,由许多简单的计算单元(称为“元胞”)组成,它们按照相同的规则在离散的空间和时间上进行演化。
在MATLAB中,你可以使用矩阵来表示元胞自动机的状态,然后编写规则来更新这些状态。
下面我将从几个方面介绍如何在MATLAB中实现元胞自动机。
首先,你可以使用MATLAB中的矩阵来表示元胞自动机的状态。
假设你有一个二维的元胞自动机,可以用一个二维的矩阵来表示。
矩阵中的每个元素可以表示一个元胞的状态,比如0表示空白,1表示存活等等。
你可以使用MATLAB的矩阵操作来初始化和更新这些状态。
其次,你需要编写规则来更新元胞的状态。
这些规则可以根据元胞的邻居状态来确定元胞下一个时刻的状态。
在MATLAB中,你可以使用循环和条件语句来实现这些规则。
例如,你可以遍历矩阵中的每个元素,然后根据它周围元胞的状态来更新它的状态。
另外,MATLAB还提供了一些内置的函数和工具箱,可以帮助你实现元胞自动机模型。
比如,MATLAB的CellularAutomata工具箱
提供了一些函数来简化元胞自动机模型的实现。
你可以使用这些函数来快速地创建和演化元胞自动机模型。
总之,在MATLAB中实现元胞自动机模型需要你熟练掌握矩阵操作、循环和条件语句等基本编程技巧,同时也需要对元胞自动机的原理有一定的了解。
希望这些信息能够帮助你在MATLAB中实现元胞自动机模型。
细胞自动机模型的建模与仿真研究

细胞自动机模型的建模与仿真研究细胞自动机(cellular automata)是一种模拟自然规律和图形成像的数学模型。
它由一个二维或三维的规则格子组成,每个格子内存储一个状态值,每个规则格子的状态值受到它周围相邻格子的状态值和一个状态转移规律的影响。
细胞自动机模型具有自适应、非线性、复杂度高、可仿真性强等特点,在许多领域得到了广泛应用。
本文将介绍细胞自动机模型的建模和仿真研究,包括应用领域、建模方法与范式以及仿真技术和算法。
应用领域细胞自动机模型最初是由物理学家约翰·冯·诺伊曼在20世纪40年代提出的,以模拟复杂的物理和生物现象。
如今,细胞自动机模型已被广泛应用于生命科学、物理学、计算机科学、环境科学、城市规划和交通规划等领域。
其中,最重要的应用领域包括生命科学中的DNA自组装、癌症模拟及细胞生长等;物理学中的自组织现象、相变及传热传质等;计算机科学中的编码、密码学及机器学习等;环境科学中的自然灾害、气候变化及植被模拟等;城市规划和交通规划中的交通流模拟、市场研究等。
细胞自动机模型的这些应用领域都要求模型具有高度自适应性、大规模性、高效性和精确性。
建模方法与范式细胞自动机模型的建模方法和范式主要是基于细胞状态及其转移规律的内在特性,可以分为元胞自动机(cellular automata,CA)和格点自动机(lattice gas automata,LGA)两类。
元胞自动机以细胞状态为中心,按照状态转移规则更新状态,某个元胞的状态只受其邻居元胞的状态所影响(如Conway生命游戏、岛模型等);而格点自动机则将物理领域中连续的物质颗粒分割成若干个较小的离散单元,在这些单元中模拟物质的运动和相互作用(如Ludwig模型、BGK模型等)。
下面我们简单介绍一下常见的几种细胞自动机模型:1. 有限局域元胞自动机(FCA)有限局域元胞自动机是指细胞状态转移规则是局部性质和有限步骤的CA模型。
元胞自动机模型

元胞行为
局部变化引起全局变化
*可以简单认为元胞自动机在运动上 类似于波.
*无胞的状态变化依赖于自身状态和 邻居的状态
元胞自动机的规则
某元胞下时刻的状态只决定于邻居的状 态以及自身的初始状态.
元胞行为
元胞网格
元胞行为
元胞邻居
经典元胞
生命游戏
生命游戏 (Came of Life)是J. H. Conway 在2世纪6年代末设计的一种单人玩的计算机 游戏(Garclner,M.,97、97)。他与现代的 围棋游戏在某些特征上略有相似:围棋中有 黑白两种棋子。生命游戏中的元胞有{"生"," 死"}两个状态 {,};围棋的棋盘是规则划分的 网格,黑白两子在空间的分布决定双方的死 活,而生命游戏也是规则划分的网格(元胞似 国际象棋分布在网格内。而不象围棋的棋子 分布在格网交叉点上)。根据元胞的局部空间 构形来决定生死。只不过规则更为简单。
程序实现
典型元胞程序精讲
交通流
谢谢!
生命游戏的构成及规则: *元胞分布在规则划分的网格上; *元胞具有,两种状态,代表“死”,l代表“生”; *元胞以相邻的8个元胞为邻居。即Moore邻居形式; *一个元胞的生死由其在该时刻本身的生死状态和周 围八个邻居的状态 (确切讲是状态的和)决定: 在当前时刻,如果一个元胞状态为“生”,且八 个相邻元胞中有两个或三个的状态为“生”,则在下-时刻该元胞继续保持为“生”,否则“死”去; 在当前时刻。如果一个元胞状态为"死"。且八个 相邻元胞中正好有三个为"生"。则该元胞在下一时刻 " 复活"。否则保持为"死"。
传染病模型的元胞自动机实现(附程序)
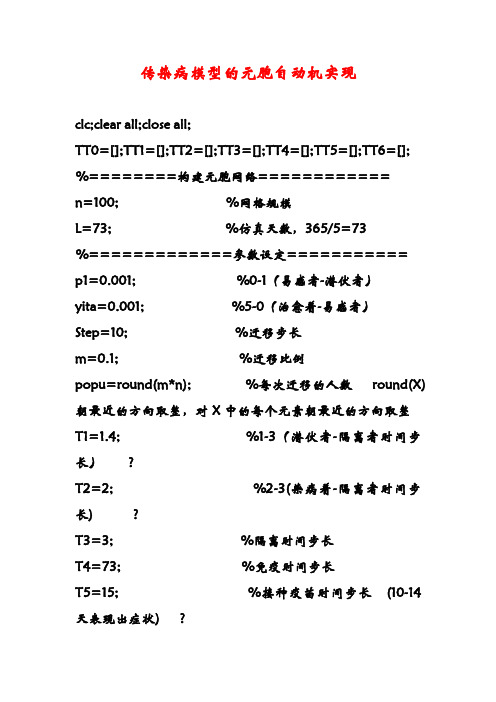
传染病模型的元胞自动机实现clc;clear all;close all;TT0=[];TT1=[];TT2=[];TT3=[];TT4=[];TT5=[];TT6=[]; %========构建元胞网络============n=100; %网格规模L=73; %仿真天数,365/5=73%=============参数设定===========p1=0.001; %0-1(易感者-潜伏者)yita=0.001; %5-0(治愈着-易感者)Step=10; %迁移步长m=0.1; %迁移比例popu=round(m*n); %每次迁移的人数round(X)朝最近的方向取整,对X中的每个元素朝最近的方向取整T1=1.4; %1-3(潜伏者-隔离者时间步长)?T2=2; %2-3(染病着-隔离者时间步长) ?T3=3; %隔离时间步长T4=73; %免疫时间步长T5=15; %接种疫苗时间步长(10-14天表现出症状) ?q1=0.3; %潜伏者强制隔离阀值?q2=0.5; %染病着强制隔离阀值?q3=0.6; %隔离者强制治愈阀值q4=0.9; %接种疫苗力度?q5=0.9; %6-5(接疫苗者-治愈者)q6=0.5; %1-2q7=0.8; %5-0lambda1=0.01075; %患者的死亡概率lambda2=0.00525; %隔离者的死亡概率%% 初始化元胞people=zeros(n); %初始化人群people(rand(n)<p1)=1; %初始化人群rand(n)生成一个n*n阶随机矩阵,元素均匀分布在区间(0,1)上tt0=[]; tt1=[];tt2=[];tt3=[];tt4=[];tt5=[];tt6=[];step1=zeros(n); %状态变化后,时间清0 step2=zeros(n);step3=zeros(n);step4=zeros(n);step5=zeros(n);for k=1:1S=people; %记录当前人群状态S易感者fi=rand(n); %患者的感染力Ri=randn(n); %易感者抵抗力,randn(n)生成n阶随机矩阵,元素服从均值为0,方差为1的标准正态分布Ri(S~=0)=0; %仅易感者有抵抗力fi(S~=1)=0; %仅患者有传染力%===各步长记录===step1(S==1)=step1(S==1)+1; % 1 表示刷新一次step2(S==2)=step2(S==2)+1;step3(S==3)=step3(S==3)+1;step4(S==5)=step4(S==5)+1;step5(S==0)=step5(S==0)+1;%===各步长清零===step1(S~=1)=0;step2(S~=2)=0;step3(S~=3)=0;step4(S~=5)=0;step5(S~=0)=0;%===各传染概率===%每个元胞共有8种(上下左右,东南、西南、东北、西北)邻居,每种邻居构成一个矩阵ne1=sqrt(1.*fi([n 1:n-1],1:n).*(1-Ri));ne2=sqrt(1.*fi([2:n1],1:n).*(1-Ri));ne3=sqrt(1.*fi(1:n,[n1:n-1]).*(1-Ri));ne4=sqrt(1.*fi(1:n,[2:n 1]).*(1-Ri));ne5=sqrt(0.7.*fi([n 1:n-1],[2:n 1]).*(1-Ri));ne6=sqrt(0.7.*fi([2:n 1],[2:n 1]).*(1-Ri));ne7=sqrt(0.7.*fi([2:n 1],[n 1:n-1]).*(1-Ri));ne8=sqrt(0.7.*fi([n 1:n-1],[n 1:n-1]).*(1-Ri));%===选出上述矩阵中各个位置的最大值===for i=1:nfor j=1:n%Pij(i,j)=ne1(i,j)+ne2(i,j)+ne3(i,j)+ne4(i,j)+...% ne5(i,j)+ne6(i,j)+ne7(i,j)+ne8(i,j);Pij(i,j)=max([ne1(i,j),ne2(i,j),ne3(i,j),ne4(i,j),...ne5(i,j),ne6(i,j),ne7(i,j),ne8(i,j)] );endend%===演化过程===people(S==0&rand(n)<Pij)=1; %%0-1people(S==0&step5>=T5&rand(n)<q4)=6; %%0-6 if S==6&rand(n)<q5people(S==6&rand(n)<q5)=5; %%6-5elsepeople(S==6)=0;endpeople(S==1&rand(n)<q6)=2; %%1-2people((S==1&step1>=T1)|(S==1&step1<=T1&rand(n)< q1))=3; %1-3 潜伏者变成隔离者people((S==2&step2>=T2)|(S==2&step2<=T2&rand(n) <q2))=3; %%2-3people(S==2&rand(n)<lambda1)=4;%2-4患者变成死亡者people(S==3&step3>=T3|(S==3&step3<=T3&rand(n) <q3))=5; %3-5people(S==3&rand(n)<lambda2)=4; %3-4people(S==5&step4>=T4&rand(n)<q7)=0; %5-0%部分治愈者变成易感者% people(S==6&rand(n)>=q5)=0; %%6-0%==%=迁移===mo1=randperm(n); %随机顺序randperm(n)返回一个随机排列的整数1:n mo2=randperm(n);move1=[mo1(1:popu);mo2(1:popu)]; % 每次移动元胞的位置(i,j)move2=ceil((rand(2,popu)-0.5)*Step); %迁移长度%2个随机数,移动用的ceil朝正无穷大方向取整,rand(n,m)生成一个n*m阶随机矩阵move2=move1+move2;move2(move2>n)=move2(move2>n)-n; % 减去move2(move2<1)=move2(move2<1)+n;%for i=1:popuif people(move1(1,i),move1(2,i))~=4 && people(move2(1,i),move2(2,i))~=4pc=people(move1(1,i),move1(2,i));people(move1(1,i),move1(2,i))=people(move2(1,i),move2( 2,i));people(move2(1,i),move2(2,i))=pc; %变的是状态,位置不变endend%===求各类人数和===t0=length(find(people==0)); % length(X)计算向量或矩阵的长度,参量X是向量,直接返回其长度;X为非空矩阵,返回矩阵X的行数和列数值中的较大值t1=length(find(people==1)); % find(k) 返回按行检索稀疏矩阵X中非零元素的"位置索引"向量k 146页t2=length(find(people==2));t3=length(find(people==3));t4=length(find(people==4));t5=length(find(people==5));t6=length(find(people==6));tt0=[tt0 t0];tt1=[tt1 t1];tt2=[tt2 t2];tt3=[tt3 t3];tt4=[tt4 t4];tt5=[tt5 t5];tt6=[tt6 t6];% % ==================画图过程================image(people*20);title(sprintf('Recovered = %.0f,Death = %.0f',t5,t4),'fontsize',15);xlabel(sprintf('t in %.0f day',k),'fontsize',13);drawnowendfor k=2:LS=people; %记录当前人群状态S易感者fi=rand(n); %患者的感染力Ri=randn(n); %易感者抵抗力,randn(n)生成n阶随机矩阵,元素服从均值为0,方差为1的标准正态分布Ri(S~=0)=0; %仅易感者有抵抗力fi(S~=1)=0; %仅患者有传染力%===各步长记录===step1(S==1)=step1(S==1)+1; % 1 表示刷新一次step2(S==2)=step2(S==2)+1;step3(S==3)=step3(S==3)+1;step4(S==5)=step4(S==5)+1;step5(S==0)=step5(S==0)+1;%===各步长清零===step1(S~=1)=0;step2(S~=2)=0;step3(S~=3)=0;step4(S~=5)=0;step5(S~=0)=0;%===各传染概率===%每个元胞共有8种(上下左右,东南、西南、东北、西北)邻居,每种邻居构成一个矩阵ne1=sqrt(1.*fi([n 1:n-1],1:n).*(1-Ri));ne2=sqrt(1.*fi([2:n 1],1:n).*(1-Ri));ne3=sqrt(1.*fi(1:n,[n1:n-1]).*(1-Ri));ne4=sqrt(1.*fi(1:n,[2:n 1]).*(1-Ri));ne5=sqrt(0.7.*fi([n 1:n-1],[2:n 1]).*(1-Ri));ne6=sqrt(0.7.*fi([2:n 1],[2:n 1]).*(1-Ri));ne7=sqrt(0.7.*fi([2:n 1],[n1:n-1]).*(1-Ri));ne8=sqrt(0.7.*fi([n 1:n-1],[n 1:n-1]).*(1-Ri));%===选出上述矩阵中各个位置的最大值===for i=1:nfor j=1:n%Pij(i,j)=ne1(i,j)+ne2(i,j)+ne3(i,j)+ne4(i,j)+...% ne5(i,j)+ne6(i,j)+ne7(i,j)+ne8(i,j);Pij(i,j)=max([ne1(i,j),ne2(i,j),ne3(i,j),ne4(i,j),...ne5(i,j),ne6(i,j),ne7(i,j),ne8(i,j)] );endend%===演化过程===people(S==0&rand(n)<Pij)=1; %%0-1people(S==1&rand(n)<q6)=2; %%1-2people((S==1&step1>=T1)|(S==1&step1<=T1&rand(n)< q1))=3; %1-3 潜伏者变成隔离者people((S==2&step2>=T2)|(S==2&step2<=T2&rand(n) <q2))=3; %%2-3people(S==2&rand(n)<lambda1)=4;%2-4患者变成死亡者people(S==3&step3>=T3|(S==3&step3<=T3&rand(n) <q3))=5; %3-5people(S==3&rand(n)<lambda2)=4; %3-4people(S==5&step4>=T4&rand(n)<q7)=0; %5-0%部分治愈者变成易感者% people(S==6&rand(n)>=q5)=0; %%6-0 %==%=迁移===mo1=randperm(n); %随机顺序randperm(n)返回一个随机排列的整数1:n mo2=randperm(n);move1=[mo1(1:popu);mo2(1:popu)]; % 每次移动元胞的位置(i,j)move2=ceil((rand(2,popu)-0.5)*Step); %迁移长度%2个随机数,移动用的ceil朝正无穷大方向取整,rand(n,m)生成一个n*m阶随机矩阵move2=move1+move2;move2(move2>n)=move2(move2>n)-n; % 减去move2(move2<1)=move2(move2<1)+n;%for i=1:popuif people(move1(1,i),move1(2,i))~=4 && people(move2(1,i),move2(2,i))~=4pc=people(move1(1,i),move1(2,i));people(move1(1,i),move1(2,i))=people(move2(1,i),move2( 2,i));people(move2(1,i),move2(2,i))=pc; %变的是状态,位置不变endend%===求各类人数和===t0=length(find(people==0)); % length(X)计算向量或矩阵的长度,参量X是向量,直接返回其长度;X为非空矩阵,返回矩阵X的行数和列数值中的较大值t1=length(find(people==1)); % find(k) 返回按行检索稀疏矩阵X中非零元素的"位置索引"向量k 146页t2=length(find(people==2));t3=length(find(people==3));t4=length(find(people==4));t5=length(find(people==5));t6=length(find(people==6));tt0=[tt0 t0];tt1=[tt1 t1];tt2=[tt2 t2];tt3=[tt3 t3];tt4=[tt4 t4];tt5=[tt5 t5];tt6=[tt6 t6];% % ==================画图过程================image(people*20);title(sprintf('Recovered = %.0f,Death = %.0f',t5,t4),'fontsize',15);xlabel(sprintf('t in %.0f day',k),'fontsize',13);drawnowendx=1:L;plot(x,tt1,x,tt2,x,tt3,x,tt4)legend('潜伏者','染病者','隔离者','死亡者')。
元胞自动机数学建模
元胞自动机数学建模
元胞自动机是一种复杂系统模型,通常用于模拟和分析自然现象、社会影响等情势。
该模型围绕着一个由许多小单位(称为元胞)组成的方格,每个元胞都可以有多种状态,如黑或白、有或无、存活或死亡等。
元胞自动机的演化过程由以下两个机制驱动:
1.局部规则:每个元胞的未来状态取决于其当前状态以及周围元胞的状态,这些状态
受到一个预先定义的局部规则的约束。
局部规则是该模型的核心部分,它确定了整个系统
的行为。
2.全局同步性:该模型是同步更新的,即所有元胞同时被更新。
每个元胞的状态变化
取决于其周围其他元胞的状态变化,这种相互作用使得元胞自动机可以展现出许多复杂的
演化形式。
元胞自动机可以用于建模自然界中的生态系统、物理系统中的相变现象、社会系统中
的群体行为等。
例如,元胞自动机可以模拟迁移的鸟群,其中局部规则可以指定鸟群的移
动方向,全局同步机制使得整个鸟群在空间中移动。
总之,元胞自动机是一种强大和灵活的数学工具,可以用于解决许多自然科学和社会
科学中的问题。
元胞自动机NaSch模型及其MATLAB代码
元胞自动机NaSch模型及其MATLAB代码作业要求根据前面的介绍,对NaSch模型编程并进行数值模拟:模型参数取值:Lroad=1000,p=0.3,Vmax=5。
边界条件:周期性边界。
数据统计:扔掉前50000个时间步,对后50000个时间步进行统计,需给出的结果。
基本图(流量-密度关系):需整个密度范围内的。
时空图(横坐标为空间,纵坐标为时间,密度和文献中时空图保持一致, 画500个时间步即可)。
指出NaSch模型的创新之处,找出NaSch模型的不足,并给出自己的改进思路。
流量计算方法:密度=车辆数/路长;流量flux=density×V_ave。
在道路的某处设置虚拟探测计算统计时间T内通过的车辆数N;流量flux=N/T。
在计算过程中可都使用无量纲的变量。
1、NaSch模型的介绍作为对184号规则的推广,Nagel和Schreckberg在1992年提出了一个模拟车辆交通的元胞自动机模型,即NaSch模型(也有人称它为NaSch模型)。
时间、空间和车辆速度都被整数离散化。
道路被划分为等距离的离散的格子,即元胞。
每个元胞或者是空的,或者被一辆车所占据。
车辆的速度可以在(0~Vmax)之间取值。
2、NaSch模型运行规则在时刻t到时刻t+1的过程中按照下面的规则进行更新:(1)加速:vnmin(vn1,vmax)规则(1)反映了司机倾向于以尽可能大的速度行驶的特点。
(2)减速:vnmin(vn,dn)规则(2)确保车辆不会与前车发生碰撞。
(3)随机慢化:以随机概率p进行慢化,令:vnmin(vn-1,0)规则(3)引入随机慢化来体现驾驶员的行为差异,这样既可以反映随机加速行为,又可以反映减速过程中的过度反应行为。
这一规则也是堵塞自发产生的至关重要因素。
(4)位置更新:,车辆按照更新后的速度向前运动。
其中vn,xn 分别表示第n辆车位置和速度;l(l≥1)为车辆长度;p表示随机慢化概率;表示n车和前车n+1之间空的元胞数;vmax为最大速度。
元胞自动机 博弈 matlab

元胞自动机是一种模拟复杂系统行为的数学工具,在许多领域都有着广泛的应用。
其中,元胞自动机在博弈论中的应用尤为突出。
通过使用元胞自动机模拟博弈过程,可以更好地理解博弈过程中的策略选择、稳定状态和行为演变。
而Matlab作为一种强大的科学计算软件,被广泛应用于元胞自动机模型的实现和分析中。
1. 元胞自动机的概念元胞自动机(Cellular Automaton, CA)是一种离散空间、离散时间的动力学系统模型。
它由一系列离散的元胞组成,每个元胞可以处于有限个状态中的一个。
元胞之间相互作用,通过一组规则确定元胞状态的演化,从而产生全局性的动力学行为。
元胞自动机可以模拟许多自然现象和社会行为,例如传染病传播、交通流动、城市规划等。
2. 博弈论与元胞自动机的结合博弈论是研究决策者间相互作用和竞争的数学理论。
博弈论的应用领域非常广泛,包括经济学、社会学、生物学等。
在博弈论中,元胞自动机可以很好地模拟多个参与者之间的策略选择和博弈结果。
通过元胞自动机模拟博弈过程,可以研究参与者策略演化的动力学行为,探究稳定策略的产生和博弈结果的变化。
3. Matlab在元胞自动机模拟中的应用Matlab是一种强大的科学计算软件,具有丰富的工具箱和编程功能,特别适合于复杂系统的建模和仿真。
在元胞自动机模拟中,Matlab提供了丰富的函数和工具,可以方便地实现元胞自动机的规则定义、初始状态设定、演化规则的编写和模拟结果的可视化。
Matlab还支持并行计算和高性能计算,可以加速大规模元胞自动机模拟的运算过程。
4. 元胞自动机博弈模型的实现步骤基于Matlab实现元胞自动机博弈模型可以分为以下步骤:4.1 初始状态设定:确定元胞自动机的初始状态,包括元胞的空间结构和初始状态值。
4.2 演化规则定义:制定元胞自动机的演化规则,包括元胞状态更新的条件和方式。
4.3 演化过程模拟:利用Matlab进行元胞自动机的演化过程模拟,计算每个时刻元胞的状态。
元胞自动机程序
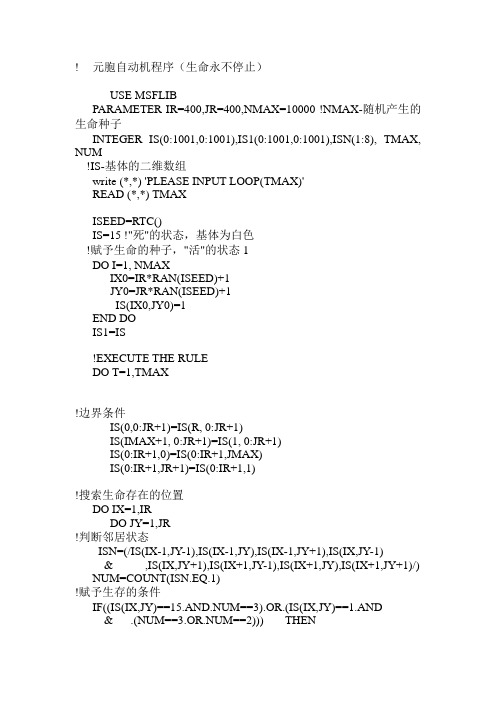
! 元胞自动机程序(生命永不停止)USE MSFLIBPARAMETER IR=400,JR=400,NMAX=10000 !NMAX-随机产生的生命种子INTEGER IS(0:1001,0:1001),IS1(0:1001,0:1001),ISN(1:8), TMAX, NUM!IS-基体的二维数组write (*,*) 'PLEASE INPUT LOOP(TMAX)'READ (*,*) TMAXISEED=RTC()IS=15 !"死"的状态,基体为白色!赋予生命的种子,"活"的状态1DO I=1, NMAXIX0=IR*RAN(ISEED)+1JY0=JR*RAN(ISEED)+1IS(IX0,JY0)=1END DOIS1=IS!EXECUTE THE RULEDO T=1,TMAX!边界条件IS(0,0:JR+1)=IS(R, 0:JR+1)IS(IMAX+1, 0:JR+1)=IS(1, 0:JR+1)IS(0:IR+1,0)=IS(0:IR+1,JMAX)IS(0:IR+1,JR+1)=IS(0:IR+1,1)!搜索生命存在的位置DO IX=1,IRDO JY=1,JR!判断邻居状态ISN=(/IS(IX-1,JY-1),IS(IX-1,JY),IS(IX-1,JY+1),IS(IX,JY-1)& ,IS(IX,JY+1),IS(IX+1,JY-1),IS(IX+1,JY),IS(IX+1,JY+1)/) NUM=COUNT(ISN.EQ.1)!赋予生存的条件IF((IS(IX,JY)==15.AND.NUM==3).OR.(IS(IX,JY)==1.AND& .(NUM==3.OR.NUM==2))) THENIS1(IX,JY)=1ELSEIS1(IX,JY)=15END IF!画图ISRE=SETCOLOR(IS1(IX,JY))ISRE=SETPIXEL(IX,JY)END DOEND DOIS=IS1END DOEND元胞自动机—产生和发展. 四个阶段:1940s 诞生:Von Neumann 自我复制机.1960-70s起步:JH.Conway 生命游戏.1980s 理论研究:S.Wolfram CA分类.1980-90s 应用:HPP-FHP格子气自动机.ngton N.Packard 人工生命元胞自动机(Cellular Automata,简称CA,也有人称其为细胞自动机、点格自动机、分子自动机或单元自动机)是一种建立在离散的时间和空间上的动力学系统。
数学建模元胞自动机代码

数学建模中,元胞自动机(Cellular Automaton,简称CA)是一种离散空间、离散
时间的数学模型。
它由一系列简单的元胞(cells)组成,每个元胞都有一些状态,
并且根据一组规则,这些状态在离散时间步上进行演化。
以下是一个简单的元胞自动机的 Python 代码示例。
在这个例子中,我们使用一维
元胞自动机,并采用最简单的规则——元胞的状态由其自身和相邻元胞的状态决定。
在这个例子中,apply_rule函数用于应用规则,generate_ca函数生成元胞自动机的演
化过程,而plot_ca函数用于绘制演化过程。
你可以通过调整rule_number、size和steps参数来尝试不同的规则、大小和演化步数,观察元胞自动机的不同演化过程。
这只是一个简单的例子,元胞自动机的规则和特性非常丰富,可以根据具体需求进行更复杂的定制。
元 胞 自 动 机
不同于一般的动力学模型,元胞自动机不是由严格定义 的物理方程或函数确定,而是用一系列模型构造的规则构成。 凡是满足这些规则的模型都可以算作是元胞自动机模型。因 此,元胞自动机是一类模型的总称,或者说是一个方法框架。 其特点是时间、空间、状态都离散,每个变量只取有限多个 状态,且其状态改变的规则在时间和空间上都是局部的。
(5)时间步长:
2 d0 k2 d 0 t 2 vmax kGB m k1
( kGB —晶界迁移速率修正系数,取值1~10) 再结晶时间: t R
3 Nv 3
tR
4
3v 再结晶晶粒尺寸:d 2 R 2 vdt 2vt R 2 N 0
4
选择形核方式
从界面输入初始条件:网格规模、边界条件、邻居类型、 形核率等 时间步t=1
以选定的形核方式形核 核心或晶粒生长 确定再结晶体积分数Φ,元胞状态,晶粒取向等 输出数据和图像 t=t+1 直到再结晶体积分数Φ=100%
输出晶界图 输出再结晶曲线和Avrami曲线
计算晶粒尺寸分布
表2-再结晶CA模拟的N-S流程图
输入初始状态
*包含粒子的动态再结晶CA
程序流程图
定义第二相粒子分布
其中, k1 :硬化系数, k2 :软化系数 (母相晶粒中每个元胞的初始位错密度相同,新再 结晶晶粒中每个元胞的初始位错密度为零。)
20 i 1/3 临界位错密度: c [ 3blm 2 ] 式中, i :界面能; m:晶界迁移率;
:单位长度位错线的能量, c2 b2
l :位错平均自由程
(3)形核: 形核率: ( , T ) C exp[ Qa ] N
RT
其中,C:常数;T:绝对温度; R:气体常数; Qa :激活能 (4)晶粒长大: 长大速率: vi mf i
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
%function NaSch02()
N=2000;
vmax=5;
timestep=500;
ss=1;
averagev=zeros();
flow=zeros();
avcardis=zeros();%000平均车间距
avrv=zeros();%000平均相对速度
avFF=zeros();%平均车辆作用力
for rho=0.05:0.05:1%车辆密度
cells=rand(1,N)<rho;
carposition=find(cells);%车辆位置初始化
carn=length(carposition);
carv=round(vmax*rand(1,carn));%速度初始化
cardis=zeros(1,carn);
rv=zeros(1,carn);%记录车辆先对速度
DMIN=4;D=40;FMAX=100;%
F=zeros(1,carn);M=2;%..........................................
%车间距、相对速度、作用力初始化
for mm=1:carn-1
cardis(mm)=carposition(mm+1)-carposition(mm)-1;
rv(mm)=carv(mm+1)-carv(mm);%rrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrr if DMIN<cardis(mm)<D
F(mm)=M*rv(mm)^2/cardis(mm);%..........................
else
if cardis(mm)>D
rv(mm)=0;
F(mm)=0;
else
rv(mm)=0;
F(mm)=FMAX;
end
end%..........................
end
mm=mm+1;
cardis(mm)=N+carposition(1)-carposition(mm)-1;
rv(mm)=carv(1)-carv(mm);%rrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrr rrrrrrr
if DMIN<cardis(mm)<D
F(mm)=M*rv(mm)^2/cardis(mm);%..........................
else
if cardis(mm)>D
rv(mm)=0;
F(mm)=0;
else
rv(mm)=0;
F(mm)=FMAX;
end
end%................................
%车间距、相对速度、作用力初始化完成
memor_cells=zeros(timestep,N);
memor_cellv=zeros(timestep,N);
memor_F=zeros(timestep,N);%............................
memor_cardis=zeros(timestep,N);%000
memor_rv=zeros(timestep,N);%000
sumv=0;pmin=0.1;pmax=0.3; flag=0;%
sumcardis=0;%00000000
sumrv=0;%000
for jj=1:timestep%开始更新
for ii=1:carn
if rv(ii)>=0
flag=1;
else
flag=0;
end
carv(ii)=min(carv(ii)+1,vmax);%加速更新
carv(ii)=min(carv(ii),cardis(ii));%减速
if flag==1;
pslow=pmin;
else
pslow=pmax;
end
if rand(1)<pslow
carv(ii)=max(carv(ii)-1,0);%随机慢化
end
if (jj>100)
sumv=sumv+carv(ii);%vvvvvvvvvvvvvvvvvvvvvvvvvvvv速度求和end
%carpositon变化
newposition=carposition(ii)+carv(ii);
if newposition<=N
carposition(ii)=newposition;
else
carposition(ii)=newposition-N;
end
memor_cells(jj,carposition(ii))=1;
end
%速度位置更新完,进行车间距、相对速度的更新
for mm=1:carn-1
if carposition(mm)<carposition(mm+1)
cardis(mm)=carposition(mm+1)-carposition(mm)-1;
if cardis(mm)<vmax%
rv(mm)=carv(mm+1)-carv(mm);%rrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrr rrrrrrrrrrrrr
else%
rv(mm)=0;
end%
if cardis(mm)>D||cardis(mm)<DMIN
rv(mm)=0;
end
%F(mm)=M*rv(mm)^2/cardis(mm);%。
else
cardis(mm)=N+carposition(mm+1)-carposition(mm)-1;
rv(mm)=carv(mm+1)-carv(mm);%rrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrr rrrrrrrrrrrrrrrrrrrrr
if cardis(mm)>D||cardis(mm)<DMIN
rv(mm)=0;
end
%
F(mm)=M*rv(mm)^2/cardis(mm);%。
end
end
mm=mm+1;
if carposition(mm)<carposition(1)
cardis(mm)=carposition(1)-carposition(mm)-1;
rv(mm)=carv(1)-carv(mm);%rrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrr rrrrrrrrrrrrrrrrrrrr
%F(mm)=M*rv(mm)^2/cardis(mm);%。
else
cardis(mm)=N+carposition(1)-carposition(mm)-1;
rv(mm)=carv(mm)-carv(1);%rrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrr
rrrrrrrrrrrrrrrrrrrrrr
if cardis(mm)>D||cardis(mm)<DMIN
rv(mm)=0;
end
% F(mm)=M*rv(mm)^2/cardis(mm);%。
end
%速度位置更新完,进行车间距、相对速度的更新完毕
for mm=1:carn-1
if (jj>100)
sumcardis=sumcardis+cardis(mm);%00000000车间距求和
sumrv=sumrv+rv(mm);%000
end
end
end%timestep时间步jj结束
cardistwo=sumcardis/(carn*(timestep-100));%000求平均车间距
rvtwo=sumrv/(carn*(timestep-100));%000求平均相对车速
FF=M*rvtwo^2/cardistwo;%000
vv=sumv/(carn*(timestep-100));%求平均车速
ww=rho*vv;
averagev(ss)=vv;
flow(ss)=ww;
avcardis(ss)=cardistwo;%0000
avrv(ss)= rvtwo;%
avFF(ss)= FF;%
ss=ss+1;
end%rho循环结束
rho=0.05:0.05:1;
plot(avrv,flow);
xlabel('avrv');
ylabel('flow');。