元胞自动机NS交通流模型C语言仿真版
高速公路交通流状态的元胞自动机模型仿真与推演
第12期2023年6月无线互联科技Wireless Internet TechnologyNo.12June,2023作者简介:陈晓静(1983 ),女,江苏宿迁人,高级工程师,硕士;研究方向:交通信息工程㊂高速公路交通流状态的元胞自动机模型仿真与推演陈晓静(江苏长天智远交通科技有限公司,江苏南京210019)摘要:文章提出了一个新的元胞自动机模型即AD 模型㊂该模型最主要的改进在于车辆的减速方式更加合理㊂本研究使用SUMO 进行微观交通仿真㊂文章假设了3种可能的下游场景,包括车道封闭㊁限流瓶颈和限速瓶颈,并使用AD 模型㊁IDM 模型和SUMO 默认的Krauss 模型分别进行分析㊂结果表明在限速瓶颈场景下,使用AD 模型可以得到最好的仿真效果㊂这一成果对未来的高速公路交通流管控工作具有重要的参考价值㊂关键词:元胞自动机模型;高速公路交通流;微观仿真;SUMO 中图分类号:U4㊀㊀文献标志码:A0㊀引言㊀㊀元胞自动机(Cellular Automata,CA)模型具有进化规则灵活㊁计算效率高的优点,是研究复杂系统行为的一个重要理论框架,已被广泛应用于各个领域[1]㊂在交通领域中,很多学者通过建立交通模型去描述和解释非平衡相变[2]㊁自组织临界性㊁亚稳态区域和同步交通等非线性现象[3-4]㊂传统的交通研究方法无法准确解释上述各类非线性现象及其特性㊂相比之下,元胞自动机非常适合于描述非线性现象[5]㊂因此,近年来越来越多的学者开始使用元胞自动机模型进行交通流模拟,包括高速公路[6]和城市道路[7]等㊂本文提出了一种新的元胞自动机模型,在合理设置车辆减速方式和参数的基础上,实现了更好的模拟效果,能够用于微观仿真中的高速公路交通流运行态势分析和管控措施研究㊂1㊀元胞自动机模型规则㊀㊀自从1992年Nagel 和Schreckenberg 提出了著名的NS 模型[8]之后,这一领域的学者先后提出了很多元胞自动机模型,但它们都存在着各自的缺点㊂其中比较集中的一点是,对车辆减速过程的描述往往过于粗糙㊂例如:NS 模型中不论车辆大小如何,都可以在一个更新时间步(通常为1s)直接减速到0㊂这样虽然可以避免碰撞,但很容易产生过大的㊁异常的减速度㊂故本文提出了一种新的元胞自动机模型,即期望减速度(Anticipated Deceleration,AD)模型㊂具体规则为:(1)计算前车的虚拟速度:vᶄn -1=MIN{v m -1,MAX{0,V anti (AD ,gap n -1)-1},v n -1};(2)确定性的加速或减速运动:v n =MIN{v n +A n ,v m }㊀㊀㊀如果(1-r )v n +rB (v n ,AD )<gap n +vᶄn -1V anti (AD ,gap n +vᶄn -1)反之ìîíïïï(3)随机慢化:v n =MAX{v n -1,0},触发概率为p;(4)位置更新:x n (t +1)=x n (t )+v n (t );其中x n 表示第n 辆车的位置,v n 表示第n 辆车的速度,A n 表示第n 辆车的加速度,gap n 表示第n 辆车的间距,括号里的t 和t +1表示时刻,模拟时间间隔为1s㊂关于模型的具体含义,需要解释的是:(1)将格点设置为1格=1m,认为1辆车的长度为8格=8m,加速时的加速度则为1m /s 2㊂(2)因为现实中车辆的减速能力有限,所以本模型引入了AD 模型㊂在某一AD 值作用下,车辆不能在瞬间减速到0,如果速度为ν,在离散化的元胞自动机模型中假设m =int(v /|AD |),那么这辆车的刹车距离B 是ν和AD 的函数:B (v ,AD )=v +(v +AD )+(v +2AD )+...+(v +mAD )=(2v +mAD )(m +1)/2由于元胞自动机模型是离散模型,减速发生在运动之前,并且AD 不一定是整数,所以此处减速距离并不等于v 2/(2AD )㊂此时车辆的减速方式不再是直接减速至与车头间距相同(v n =gap n ),而是通过寻找能满足条件B (v ,AD )ɤgap 的最大速度值来实现,记为v n =V anti (AD ,gap n )㊂具体方法是逐个试验ν,ν-1, ,类似于穷举㊂和基于NS 规则的模型相比,在AD 模型中,当车辆接近前方的慢车时,它会采用更大的减速度刹车㊂这样就降低了在未来某时刻忽然采用过大减速度的可能性,同时这一机理也促进了同步流的稳定形成㊂另外,当密度不断增加时,车辆速度会下降,此时AD 模型的减速规则会越来越接近NS 模型㊂(3)为了体现后车对前车运动状态的即时反应,前车的虚拟速度效应也在AD 模型中有应用㊂和前人模型的区别是,将前人使用的vᶄn -1=MIN{v m -1,MAX{0,gap n -1-1},v n -1}改变为:vᶄn -1=MIN{v m -1,MAX{0,V anti (AD ,gap n -1)-1},v n -1}(4)此处考虑两种不同的驾驶策略,一种偏保守,另一种偏激进,且前者的比例为r ,后者的比例为1-r ㊂r =1则演化为保守模型,r =0演化为激进模型㊂此处r 的含义非常接近于一些跟驰模型中的侵略性参数㊂(5)关于参数取值,通常取随机慢化概率p =0.1,保守车辆比例r =0,Vm =32m /s (对应大约120km /h)㊂而AD 取值可以根据具体需要调整,本文统一取值为-4m /s 2㊂2㊀交通流数据特征㊀㊀本文的仿真研究区域是润扬大桥北侧㊁扬溧高速与沪陕高速交会处的路段㊂由南向北的车流从桩号为K3+315的地点A 开始运动,经过桩号为K0+795的地点B 之后,可以分别从地点C(桩号K0+350)和地点D(桩号K0+310)的立交驶出㊂这4个地点均安装有监像头㊂在2022年9月30日,即国庆放假前一天,这一路段在下午出现了较长时间的交通拥堵,并影响到了道路上游区域,因此本文选择这一场景进行微观交通仿真研究㊂具体的交通流量通过自行开发的视频检测程序提取,其基础框架为YOLO V5+Deepsort,可以确保较高的精度㊂其中,地点B 统计车辆驶离高速公路主线前的流量;地点C 统计车辆从汊河枢纽驶入高速前的流量;地点D 统计车辆从汊河枢纽驶入高速后的流量㊂4个地点的交通流量统计结果如图1所示,时间为下午4点40到晚上6点,包括以1min 为间隔和以10min 为间隔的结果,数值单位全部换算为辆/h /车道,均为2或3个车道的平均结果㊂由于摄像头转动,导致5点40以后K0+310处的数据难以采集㊂从图2可以看到,除K0+350之外,其余地点的流量变化幅度较大㊂K0+350的流量明显小于上游K0+795处,可推测这一带拥堵严重,从而积压了大量车辆㊂而K0+310的流量有所恢复,主要原因是有较多车辆通过D 点立交进入主线㊂图1㊀4个地点的流量统计结果3 微观交通仿真和评价3.1㊀仿真配置㊀㊀从监控视频和流量统计结果可以看到,在K0+ 350和K0+310下游一带,出现了严重的拥堵,本文用3种不同的手段对这一拥堵场景进行仿真,具体包括:(1)场景A:车道封闭㊂假设在K0+310下游(图2中的路段1)发生特殊事件(例如:交通事故),导致左车道临时关闭,具体影响长度为20m,并于20min 后恢复通行㊂(2)场景B:设置限流瓶颈㊂假设在K0+310下游有一个限流瓶颈,每一辆车在瓶颈处(图2中的路段1下游2km)都要停车10s,这一设置的原理类似于收费站㊂(3)场景C:设置限速瓶颈㊂假设在K0+310下游路段2的限速降为40km/h,从而造成拥堵效果㊂本文使用的微观仿真交通软件是SUMO㊂它是一种开源㊁微观㊁多模态的交通仿真软件[9],自带有很多跟驰模型和换道模型,并且可以利用TraCI接口,用Python和C++语言实现模型二次开发㊂在仿真区域内设置如下3种车辆行驶路径,并按照实际流量赋值:(1)驶离高速公路主线:A->B->C;(2)驶入高速公路主线:C->D;(3)完整通过仿真区域:A->B->C->D㊂仿真时间段为T=3100s,其中前100s没有任何车辆输入,用于清空道路㊂车辆从第101s开始进入道路,按照实地采集的10min统计数据输入车辆,具体结果如表1所示㊂表1㊀仿真流量配置实际时间仿真时间/s A->B->C->D A ->B->C(驶离高速)C->D (驶入高速)左中右左中右4:40PM101~7001571638761117170 4:50PM701~130020821010261117192 5:00PM1301~190017720910661117136 5:10PM1901~25001381627461117152 5:20PM2501~31001121047161117174㊀㊀本文共使用3种跟驰模型进行仿真㊂除前文所述的AD模型外,还使用了SUMO默认的Krauss模型[10]和交通流领域常用的IDM模型[11]进行对比㊂由于AD模型不是SUMO内置的模型,需要单独进行外部配置才能加载到SUMO的代码库中,具体步骤包括:编写名称标签㊁编写相关参数的声明㊁设置默认值㊁调整构造函数,然后使用Visual Studio进行自动编译㊂3.2㊀仿真结果评价㊀㊀分析场景A的仿真结果,如图2所示,包括K0+ 310处左右车道的平均流量和平均速度曲线㊂可以看到在车道封闭的20min内,车辆到达K0+310时减速非常明显,尤其是左车道㊂而在封闭解除后,两个车道的交通状态都会迅速恢复,流量和速度都和车道封闭时存在巨大的差异㊂相比之下,实际交通数据的流量波动较小(图中黑色曲线),前后不存在显著差异㊂总而言之,3种模型的仿真结果都和实际交通状态不太一致,意味着场景A的配置可能与现实交通不吻合㊂分析场景B的结果,如图3所示㊂可以看到此时3个模型的结果差异并不大,均在1000s左右开始形成严重的拥堵㊂和实际交通数据相比,模拟结果的波动始终更大,3个模型的流量均下降至很低,说明即便是短暂的停车,也会对整个系统产生很大的影响㊂这意味着场景B的配置也可能与现实交通不太吻合㊂分析场景C的结果㊂从图4可以清楚地看到,此时的仿真平均流量明显和实际交通数据更为接近,两个车道的吻合程度均超过了场景A和B㊂在定量层面,IDM模型的仿真结果波动性较强,而Krauss模型和AD模型的结果比较稳定,值得进一步研究和对比㊂为了定量评估各场景下模型的表现,参照公式(1)㊁(2)计算仿真结果稳定段数据值和实测数据值的均方根误差(Root Mean Square Error,RMSE)以及平均绝对百分比误差(Mean Absolute Percentage Error,MAPE):RMSE=1mðm i=1(h(x i)-y i)2(1) MAPE=1mðm i=1h(x i)-y i y i(2)图2㊀场景A的仿真结果对比㊀㊀其中,i为第i个数据;m为总数据量;h(x i)为数据i对应的仿真结果;y i为数据i对应的实际值㊂此时计算结果如表2所示,不同场景和模型的MAPE和RMSE 结果各不相同㊂为统一起见,此处主要使用MAPE结果进行仿真效果评价㊂就仿真场景而言,场景C的3种模型平均仿真结果相对最好,MAPE的平均值为25.9%㊂就跟驰模型而言,AD模型在3种场景里的仿真结果最好,MAPE的平均值为62.8%㊂而场景C+AD 模型具有最好的仿真结果,MAPE的平均值仅有16.0%㊂这说明本场景最佳的仿真方案是假设路段1限速40km/h,并使用AD模型㊂这体现出元胞自动机模型在高速公路交通流仿真中具备了一定的优势㊂图3㊀场景B的仿真结果对比图4㊀场景C的仿真结果对比表2㊀不同模型下各场景误差计算场景模型车道时间范围/s MAPE RMSE场景A KraussADIDM左车道1050~2220130.3%328.1右车道1080~222044.7%646.1左车道1050~2220118.9%322.0右车道1080~222040.7%542.1左车道1200~242027.7%316.0右车道1200~242044.3%217.3场景B KraussADIDM左车道1080~3000191.2%440.7右车道1050~300033.1%208.7左车道1080~300099.1%475.1右车道1050~300086.2%427.4左车道1180~320028.6%187.0右车道1180~3200204.2%473.2场景C KraussADIDM左车道780~300022.2%189.3右车道780~300012.3%112.3左车道780~300018.3%151.6右车道780~300013.6%126.2左车道880~310061.2%946.5右车道880~310027.9%338.44 结语㊀㊀本文提出了一个新的元胞自动机模型,即AD模型㊂和前人模型相比,最主要的改进在于车辆的减速方式更加合理㊂接着简要分析了润扬大桥北侧路段在拥堵时段的交通流特征,在采集监控摄像头视频数据的基础上,使用SUMO进行了微观交通仿真,并使用AD模型㊁IDM模型和SUMO默认的Krauss模型在车道封闭㊁限流瓶颈和限速瓶颈3个场景下分别进行分析㊂结果表明在限速瓶颈场景下,使用AD模型可以得到最好的仿真效果㊂这一成果对未来的高速公路交通流管控工作具有重要的参考价值㊂参考文献[1]黎夏,叶嘉安.基于神经网络的元胞自动机及模拟复杂土地利用系统[J].地理研究,2005(1): 19-27.[2]KERNER B S,REHBORN H.Experimental properties of phase transitions in traffic flow[J]. Physical Review Letters,1997(20):4030-4033. [3]KERNER B S,KONHUSER P.Cluster effect in initially homogeneous traffic flow[J].Physical Review E,1993(4):2335-2338.[4]雷丽,薛郁,戴世强.交通流的一维元胞自动机敏感驾驶模型[J].物理学报,2003(9):2121-2126. [5]HELBING D,HENNECKE A,SHVETSOV V,et al. MASTER:Macroscopic traffic simulation based on a gas-kinetic,non-local traffic model[J].Transportation Research Part B,2001(2):183-211.[6]KNOSPE W,SANTEN L,SCHADSCHNEIDER A, et al.Towards a realistic microscopic description of highway traffic[EB/OL].(2000-11-24)[2023-07-07].https:///usercenter/paper/ show?paperid=ce8512ad8eca4645c77ed80dc06a07 bc&site=xueshu_se.[7]JIN C J,WANG W,JIANG R.Cellular automaton simulations of a T-shaped unsignalised intersection with refined configurations[J].Transportmetrica A,2014 (10):273-283.[8]NAGEL K,SCHRECKENBERG M.A cellular automaton model for freeway traffic[J].Journal De Physique I,1992(12):2221-2229.[9]LOPEZ P A,BEHRISCH M,BIEKER-WALZ L, et al.Microscopic traffic simulation using SUMO[C]. Maui:IEEE Intelligent Transportation Systems Conference(ITSC),2018.[10]KRAUßS,WAGNER P,GAWRON C.Metastable states in a microscopic model of traffic flow[J]. Physical Review E,1997(55):5597-5602. [11]TREIBER M,KESTING A,THIEMANN C. Traffic flow dynamics:data,models and simulation [M].Berlin:Springer,2013.(编辑㊀王永超)Simulation and deduction of cellular automata model for highway traffic flow stateChen XiaojingITSSKY Technology Co. Ltd. Nanjing210019 ChinaAbstract This paper proposes a new cellular automaton model namely AD model.The main improvement of the model is that the vehicle deceleration mode is more reasonable.The microscopic traffic simulation was performed using SUMO.Three possible downstream scenarios were assumed including lane closure flow-limiting bottleneck and rate -limiting bottlenecks and analyzed separately using the AD model the IDM model and the default Krauss model of SUMO.The results show that the best simulation results can be obtained using the AD model in the rate-limiting bottleneck scenario.This achievement has an important reference value for the future expressway traffic flow control work.Key words cell automaton model highway traffic flow micro-simulation SUMO。
融合多源信息的元胞自动机交通流模型

融合多源信息的元胞自动机交通流模型随着城市化进程的不断发展和交通流量的快速增长,如何合理优化城市交通系统成为了亟待解决的问题。
为了解决交通流量管理中遇到的挑战,研究人员开始使用元胞自动机交通流模型作为一种有效的工具。
元胞自动机交通流模型结合了多源信息,并能够对城市道路网络中的交通流进行模拟和预测。
本文将重点介绍融合多源信息的元胞自动机交通流模型,并详细分析其优势和应用前景。
一、元胞自动机交通流模型简介元胞自动机交通流模型是一种基于交通流动的个体自动行为的模拟方法。
它将整个道路网络划分为多个元胞,每个元胞代表一个交通单元,如车辆或行人等。
通过定义元胞之间的规则和交互方式,模型可以刻画城市道路系统中的交通流动情况。
元胞自动机交通流模型使用自动机理论和网络拓扑结构相结合的方法,具有模拟真实交通行为的优势。
二、多源信息融合的意义和方法多源信息的融合对于提高交通流模型的准确度和预测能力至关重要。
常见的多源信息包括道路网络拓扑结构、车辆速度、交通信号灯状态、道路岔口等。
通过合理融合这些信息,可以更好地模拟城市交通流动的实际情况。
在元胞自动机交通流模型中,多源信息融合的方法主要包括以下几种:数据融合、模型融合和参数融合。
数据融合是将来自不同数据源的交通数据进行处理和整合,以获取全面准确的信息。
模型融合是将不同类型的交通模型进行整合,并基于多种模型的结果进行预测和优化。
参数融合是将不同参数的评估结果进行整合,以获取更加全面和准确的评估结果。
三、融合多源信息的元胞自动机交通流模型的优势融合多源信息的元胞自动机交通流模型相比传统模型具有以下优势:1. 准确性提高:多源信息的融合使得模型更加贴近真实交通情况,模拟结果更准确可靠。
2. 鲁棒性增强:多源信息的融合使得模型对于数据噪声和不确定性具有更好的适应和鲁棒性。
3. 预测能力增强:多源信息的融合使得模型在预测和优化交通流方面具有更高的准确性和可信度。
四、融合多源信息的元胞自动机交通流模型的应用前景融合多源信息的元胞自动机交通流模型在城市交通系统优化和管理中具有广阔的应用前景。
双向航道船舶交通流元胞自动机模型及仿真
双向航道船舶交通流元胞自动机模型及仿真0 引言港口�p向航道一般由进口航道、出口航道和分隔带(或分隔线)组成。
从船舶航行安全的角度考虑,《1972年国际海上避碰规则》(以下简称“COLREGs 1972”)第十条“分道通航制”将双向航道定义成了两条由分隔带(或分隔线)绝对隔离的、相互独立的通航分道。
然而,船舶交通流往往是不均匀的,存在“重交通方向”和“轻交通方向”[1]。
这种不均匀性表现在双向航道中的一条航道上(或该航道的部分航段上)的船舶交通流相对密集,另一条航道上(或该航道的部分航段上)的船舶交通流却较为稀疏,其结果就是一条航道(或其部分航段)产生交通拥堵,而另一条航道(或航段)闲置浪费。
因此,利用“可变道”的理念合理组织和控制双向航道的船舶交通流,对提高整个航道的通过能力具有重要的意义。
对双向航道的研究最早集中在运用经验公式对双向航道的通过能力和航道宽度进行计算[2-3],计算时往往将两条航道看作相互独立的单航道,难以体现人(驾引人员)、机(船)、环境(风、浪、流)、管理(船舶交通管理、港航营运与调度等)等因素对航道通过能力的影响以及两条通航分道间的相互制约。
船舶操纵模拟器由于能较为有效地反映船舶在航迹带上对人和环境的响应,在诞生后不久便在航道研究领域[4-7]得到了广泛的应用。
然而,在复杂系统性问题方面,经验公式和船舶操纵模拟器都显得束手无策。
考虑到整体性和系统性,陈婷婷等[1]提出了“潮汐式”可变航道的概念,为双向航道的发展和交通组织提供了一种新思路。
然而,“潮汐式”可变航道对整个航道通过能力的影响还有待深入研究。
本文在文献[8]的基础上建立一种可变道的双向航道模型,从微观层面对可变道双向航道的船舶交通流进行模拟,揭示船舶的双向变道行为对航道通过能力的影响,为船舶交通流的组织提供参考。
1 基于AIS的可变道双向航道元胞自动机模型2.2 安全距离根据文献[10]的船舶交通流实态观测,船舶周围存在一个椭圆形的船舶领域;该船舶领域在船舶前方的长度为3倍船长,在船舶后方的长度为1.8倍船长。
双向航道船舶交通流元胞自动机模型及仿真
双向航道船舶交通流元胞自动机模型及仿真全文共四篇示例,供读者参考第一篇示例:一、双向航道船舶交通流双向航道船舶交通流是指在特定水域内,存在来往的双向船舶流动。
这种情况下,船舶之间的冲突和碰撞可能性较大,交通管理也较为复杂。
研究双向航道船舶交通流的行为规律对提高船舶交通的安全性和效率具有重要意义。
二、元胞自动机模型元胞自动机是由斯蒂芬·沃尔夫勒姆在20世纪80年代提出的一种离散动力学模型,适用于模拟细胞、动植物种群、城市交通等多种复杂系统的行为规律。
其核心理念是将空间离散化为若干个细胞,然后通过规则来描述细胞之间的相互作用,从而模拟整体系统的行为。
三、双向航道船舶交通流元胞自动机模型1. 状态定义在双向航道船舶交通流的元胞自动机模型中,每个细胞可以处于航道内或航道外的状态。
航道内的细胞可以分为左右两个方向,分别表示船舶在航道内的行驶方向。
2. 规则定义- 交通规则:船舶在航道内遵循规定的航行规则,例如避让规则、优先通行规则等。
- 船舶行为规则:船舶在元胞中的移动遵循一定的行为规则,例如航速、转向等。
- 碰撞规则:在两船相遇时,根据不同的碰撞规则进行处理,以避免碰撞事件的发生。
4. 仿真实验通过对双向航道船舶交通流元胞自动机模型的仿真实验,可以观察航道内船舶的运动规律、交通拥堵情况、碰撞概率等。
根据仿真结果可以调整航道交通管理策略,提高船舶交通的安全性和效率。
结论双向航道船舶交通流元胞自动机模型及仿真研究为船舶交通管理提供了一种新的思路。
通过对航道交通流的行为规律进行建模和仿真,可以为船舶交通管理提供科学依据,提高船舶交通的安全性和效率。
未来,可以进一步完善模型,对不同类型航道、不同规模的船舶交通进行研究,以期实现更加智能化的航道交通管理。
第二篇示例:引言航道交通管理一直是船只导航领域的重要课题之一,尤其是双向航道船舶交通流管理。
为了让船舶能够安全、高效地在航道上航行,研究人员一直在探索各种交通管理方法。
元胞自动机的交通流模拟算法

元胞自动机的交通流模拟算法元胞自动机(Cellular Automata,CA)是一种离散的空间模型,由许多相同形态和行为的元胞组成,每个元胞根据一定的规则与周围的元胞进行交互作用。
其中,交通流模拟算法是元胞自动机在交通领域的应用之一。
本文将介绍交通流模拟算法的基本原理、应用场景和发展趋势。
一、交通流模拟算法的基本原理交通流模拟算法基于元胞自动机的思想,将道路划分为一系列的元胞,并对每个元胞进行状态的定义和更新。
在交通流模拟中,每个元胞可以表示一个车辆,其状态包括位置、速度、加速度等。
通过定义元胞之间的交互规则,模拟车辆在道路上的运动和交通流的演化。
交通流模拟算法的核心是规则的制定和更新。
常用的规则包括加速规则、减速规则、保持规则等。
加速规则可以使车辆在没有障碍物的情况下提高速度;减速规则可以使车辆在遇到障碍物或交通拥堵时减速;保持规则可以使车辆保持一定的距离和速度,以保证交通流的稳定性。
二、交通流模拟算法的应用场景交通流模拟算法广泛应用于城市交通规划、交通信号优化、交通拥堵预测等领域。
通过模拟交通流的运动和演化,可以评估不同交通策略对交通流的影响,优化交通信号控制,预测交通拥堵情况,提供科学依据和决策支持。
在城市交通规划中,交通流模拟算法可以模拟城市道路网络的运行情况,评估不同道路规划方案对交通流的影响。
通过模拟交通流的运动和演化,可以评估道路的通行能力、交通拥堵程度和交通状况的稳定性,为城市交通规划提供科学依据。
在交通信号优化中,交通流模拟算法可以模拟交通信号的控制策略,评估不同信号控制方案对交通流的影响。
通过模拟交通流的运动和演化,可以评估信号配时的合理性、交通信号的协调性和交通状况的改善程度,为交通信号优化提供科学依据。
在交通拥堵预测中,交通流模拟算法可以模拟交通拥堵的演化过程,预测交通拥堵的发生时间和地点。
通过模拟交通流的运动和演化,可以评估不同交通拥堵预测模型的准确性和可靠性,为交通拥堵预测提供科学依据。
元胞自动机NS交通流模型C语言仿真版
元胞自动机NS交通流模型C语言仿真版/* 元胞自动机的NS交通流模型简要说明:将7.5km的道路离散为1000个7.米长的格子,每个格子或为空或为车辆占据,车辆的速度v为0~Vmax之间的值,每辆车遵循同一规则运动,即:1、加速min(v+1,Vmax);2、减速max(与前一辆车的距离,v);3、以概率p,v=v-1;4、车辆位置更行 x(t+1)=x(t)+v(t+1)。
仿真采用周期性边界,即头围相接形成一个环路。
仿真得到不同车辆密度下的车流平均速度。
*/#include#include#include#include#include#define Lane 1000#define TBEGIN 2000#define T 3000#define Vmax 5#define P 0.5void initcars(int );void move();float caculate(int );int FindFront(int ,int );int cars[T][Lane]; //定义数组void main(){int i,j;float v;srand(time(NULL));for(i=10;i<=1000;i+=10) //不同车辆数目{initcars(i);move();v=caculate(i);//printf("车辆数为%d时的平均速度为:%.2f\n",i,v); }}//初始化道路车辆void initcars(int n){int i,j,location,speed;for(i=0;i<t;i++)for(j=0;j<lane;j++)cars[i][j]=-1;//赋初值for(i=0;i<n;i++){location=rand()%1000;if( cars[0][location] ==-1){cars[0][location]=rand()%(Vmax+1);}elsei--;}//debug/*for(j=0;j<lane-1;j++)if( cars[0][j] >=0 )printf("%d %d\n",j,cars[0][j]);*/}//车辆运动void move(){int i=0,j,x,v,gap;for(i=0;ifor(j=0;j{if( cars[i][j] >= 0 ){v=cars[i][j];gap=FindFront(i,j); //与前车距离//printf("weizhi: %d sudu:%d gap:%d\n",j,cars[i][j],gap); //速度更新if( (v+1) <= Vmax)v++;if( v > gap )v = gap;if( v>0 && ( rand()%100 <= P*100 ) ) v--;//位置更新x=v+j;x=x%1000;//printf("\n%d %d\n",x,v);if( cars[i+1][x] == -1 ){cars[i+1][x]=v;}else{printf("撞车啦,第%d秒,第%d格\n",i,j); exit(1);}}}}//计算与前车距离int FindFront(int i,int j){int front=0;while( cars[i][(++j)%1000] == -1 ) {front++;}return front;}//计算、记录平均速度float caculate(int n){long s=0,i,j;float v=0;for(i=TBEGIN;i<t;i++)for(j=0;j<lane;j++){if( cars[i][j] >= 0 ){s+=cars[i][j];//printf("%d %d\n",j,cars[2999][j]);}}//计算平均速度v=(float)s/n/(T-TBEGIN);//记录数据FILE *fp;if( ( fp = fopen("记录.txt","ab") ) == NULL ) {printf("error");exit(2);}else{fprintf(fp,"密度:%3d 速度%.2f ",n,v); char line[] = "\r\n";fwrite(line, strlen(line), 1, fp);}fclose(fp);return v;}</lane;j++)</t;i++)</lane-1;j++)</n;i++)</lane;j++)</t;i++)。
基于元胞自动机模型的交通规则仿真研究

基于元胞自动机模型的交通规则仿真研究【摘要】本文围绕多车道交通规则及其通行性能问题,利用元胞自动机理论,建立了多车道交通流元胞自动机模型,在计算机上进行了模拟仿真,从空间、时间和状态等特征上模拟了各车辆的行驶情况,获得了不同超车规则、最高限速和最低限速对应的交通流各种特性,包括车辆平均速度、道路交通流量、车辆换道超车频率、道路占用率、道路利用率等指标,评价了不同交通规则的实际效果,为优化交通规则,改善道路通行能力,提高道路资源利用效率提供了可行方法。
【关键词】多车道元胞自动机模型;交通规则;交通流;通行性能;计算机仿真Abstract:This paper propose the multi-lane traffic flow cellular automaton model to analysis performance of different traffic rules,which models the traffic system by nonlinear dynamical system with discrete space,time and states.our algorithm outputs macro indicators of traffic flow under different rules,including average speed,traffic flow,lane changing frequency,road occupancy rate,road utilization,etc.We evaluated the actual effect of three traffic rules,and found the feasible method to optimize traffic rules,to improve road capacity,efficiency as well as utilization of the whole traffic system.Key words:multi-lane cellular automation;traffic rules;traffic flow;traffic capacity;computer simulation1.引言如何解决交通堵塞、交通安全及相应的环境污染问题成为近一个世纪以来各国政府和公众关注的焦点,科学家希望通过交通流仿真技术,分析研究实际交通环境下车辆行为,揭示车辆运动规律,预测未来道路网流量,制定科学的交通规划和交通规则,促进交通问题的解决。
元胞自动机交通流模型
模型中, 在CA模型中,散布在规则格网 (Lattice Grid)中 模型中 中 的每一元胞(Cell)取有限的离散状态,遵循同样的 取有限的离散状态, 的每一元胞 取有限的离散状态 作用规则,依据确定的局部规则作同步更新。 作用规则,依据确定的局部规则作同步更新。大 量元胞通过简单的相互作用而构成动态系统的演 量元胞通过简单的相互作用而构成动态系统的演 化。 CA模型的特点:时间、空间、状态都离散,每个 模型的特点:时间、空间、状态都离散, 模型的特点 变量只取有限多个状态,且其状态改变的规则在 变量只取有限多个状态, 时间和空间上都是局部的。 时间和空间上都是局部的。
Sit +1 = f ( Sit−1 , Sit , Sit+1 )
S. Wolfram的初等元胞自动机 的初等元胞自动机
t t+1 111 0 110 1 101 0 100 0 001 1 010 1 001 0 000 0
由于只有0、1两种状态, 所以函数f共有28=256种状态。
256种初等 初等CA规则 初等
Los Alamos National Laboratory: : TRANSIMS (TRansportation ANalysis SIMulation System)
近年国际上出现的一门 新的交叉学科 -交通物理学
B.S.Kerner, Springer 2004
“幽灵式交通堵塞” (“phantom” or “ghost” 幽灵式交通堵塞” 幽灵式交通堵塞 traffic jams)的现象早在 年就由Treiterer 和 )的现象早在1975年就由 年就由 Myers 通过航拍图像发现。 通过航拍图像发现。 直到1992年由德国学者 年由德国学者Nagel 和 Schreckenberg 直到 年由德国学者 用元胞自动机(CA)交通流模型才加以成功再现 用元胞自动机( ) 和模拟解释。 和模拟解释。 Nagel and Schreckenberg. A Cellular automaton model for freeway traffie.Journal of . Physics(France),1992 ,
交通流中的NaSch模型及MATLAB代码元胞自动机完整
交通流中的NaSch模型及MATLAB代码元胞自动机完整编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望(交通流中的NaSch模型及MATLAB代码元胞自动机完整)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为交通流中的NaSch模型及MATLAB代码元胞自动机完整的全部内容。
元胞自动机 NaSch模型及其MATLAB代码作业要求根据前面的介绍,对NaSch模型编程并进行数值模拟:●模型参数取值:Lroad=1000,p=0。
3,Vmax=5。
●边界条件:周期性边界。
●数据统计:扔掉前50000个时间步,对后50000个时间步进行统计,需给出的结果。
●基本图(流量—密度关系):需整个密度范围内的。
●时空图(横坐标为空间,纵坐标为时间,密度和文献中时空图保持一致, 画500个时间步即可)。
●指出NaSch模型的创新之处,找出NaSch模型的不足,并给出自己的改进思路。
●§ 流量计算方法:密度=车辆数/路长;流量flux=density×V_ave。
在道路的某处设置虚拟探测计算统计时间T内通过的车辆数N;流量flux=N/T。
●§ 在计算过程中可都使用无量纲的变量。
1、NaSch模型的介绍作为对184号规则的推广,Nagel和Schreckberg在1992年提出了一个模拟车辆交通的元胞自动机模型,即NaSch模型(也有人称它为NaSch模型)。
●时间、空间和车辆速度都被整数离散化。
●道路被划分为等距离的离散的格子,即元胞。
● 每个元胞或者是空的,或者被一辆车所占据。
● 车辆的速度可以在(0~Vmax )之间取值。
基于一维交通流元胞自动机计算机编程模拟
基于一维交通流元胞自动机计算机编程模拟【摘要】主要介绍了元胞自动机的特点及定义,元胞自动机在道路交通流模拟中的应用,设计了交通元胞自动机的结构,建立了运用元胞自动机的交通流模拟模型, 运用C语言编程实现模拟,并利用Matlab得到流率与交通密度的关系;探讨了元胞自动机在道路交通流模拟中应用前景。
【关键词】一维交通流;元胞自动机; C语言编程;模拟一、引言1992年,Nagel-Schreckenberg采用元胞自动机模拟公路交通流,从此以后,相继有许多研究机构开始了交通元胞自动机的研究,并已有许多研究成果及相关模拟软件产生。
元胞自动机(Cellular Automata,简称CA)是一种时间和空间都离散的动力系统模型。
散布在栅格(Lattice Grid)中的每一元胞(Cell)取有限的离散状态,遵循同样的作用规则,依据确定的局部规则作同步更新,大量元胞通过简单的相互作用而构成动态系统的演化。
不同于一般的动力学模型,元胞自动机不是由严格定义的物理方程或函数确定,而是用一系列模型构造的规则构成。
凡是满足这些规则的模型都可以算作是元胞自动机。
因此,元胞自动机是一类模型的总称,或者说是一个方法框架。
其特点是时间、空间、状态都离散,每个变量只取有限多个状态,且其状态改变的规则在时间和空间上都是局部的。
二、元胞自动机介绍1、元胞自动机在元胞自动机的发展过程中,许多学者构造了不同的模型。
本文主要介绍交通流模拟常用的初等元胞自动机,又称Wolfram元胞自动机。
初等元胞自动机(Elementary Cellular Automata,简称E-CA)是状态集S 只有两个元素{s1,s2},即状态个数k=2,邻居半径r=1的一维元胞自动机。
2、元胞自动机的构成元胞自动机最基本的组成是元胞、元胞空间、邻居及规则四部分。
即元胞自动机是由一个元胞空间和定义于该空间的变换函数所组成的。
(1)元胞元胞又可称为单元或基元,是元胞自动机的最基本的组成部分。
基于元胞自动机的交通流计算机模拟
计
文章编号 :0 6—9 4 (0 8 0 10 3 8 20 ) 8—0 7 一 4 2 1 o
算
机
仿
真
基 于元 胞 自动 机 的交 通 流 计 算 机 模 拟
宇仁德 , 大龙 李
( 山东理工大学 , 山Βιβλιοθήκη 淄博 2 5 4 ) 5 0 9
s rb s t e mo i g c r ce fv h ce n tafcfo a ha gng r e fc lu a uomain,t stafc fo smu c ie h v n ha a t ro e i lsi r f lw sc n i ulso e ll ra t i to hu r fi lw i —
动机在道路交通模拟 中的应用 , 设计 出了交通元胞 自动机 的结构 , 分析 了交通 胞 自动机所采取 的状态变换原则 , 立了一 建
维( 单车道) 交通 流模拟模 型 ; 并利用 c 言编程实现模 拟。模 拟结果符合实际交通流的特点。 语
关键词 : 交通元胞 自动机 ; 交通流 ; 元胞 自动机模型 ; 模拟 ; 变换原则
l t n mo es b s d o e ll r a t mai n a e p e e t d Af r c l r t g t e b s a a tr u h a el lr ai d l a e n c l a u o t r r s n e . t ai ai h a i p r mee s s c s c l a o u o e b n c u lnt e gh,ma i m p e n O o x mu s e d a d S n,t i a e rtd s u s sa d e tb ih st e taf el lra t ma in o r f c h sp p rf s ic s e n sa l e h r i c l a u o t n t f i s f c u o ai
元胞自动机的交通流模拟算法

元胞自动机的交通流模拟算法一、引言交通流模拟是城市规划和交通管理中的重要工具。
通过对交通流进行建模和模拟,我们可以研究不同交通策略和规划方案对交通流的影响,从而提出优化的交通管理方案。
而元胞自动机是一种常用的交通流模拟方法。
本文将介绍元胞自动机的基本原理、交通流模拟算法以及在实际应用中的一些案例。
二、元胞自动机的基本原理元胞自动机是一种基于空间和时间分布的离散动力学模型。
它由离散的元胞组成,每个元胞具有一些状态和规则,并与其相邻的元胞进行交互。
在交通流模拟中,元胞通常表示为一个道路上的一段距离或一个交叉口,而状态可以是车辆的位置、速度等。
元胞自动机的基本原理是通过迭代地更新每个元胞的状态,模拟交通流的演化过程。
更新的规则可以根据交通流模型的不同而不同,例如,可以根据车辆的速度、距离等因素来确定更新规则。
通过不断地迭代更新,交通流模型可以模拟出车辆的运动和交通流的演化。
三、交通流模拟算法3.1 元胞自动机的基本模型元胞自动机的交通流模拟算法通常包括以下步骤:1.初始化元胞状态:根据实际情况,将道路划分为若干个元胞,并初始化每个元胞的状态,例如,设置车辆的初始位置、速度等。
2.更新元胞状态:按照一定的规则,迭代更新每个元胞的状态。
更新规则可以根据实际情况和交通流模型的要求进行设计,例如,根据车辆的速度、距离等因素来确定车辆的前进方向和速度。
3.计算交通流指标:根据更新后的元胞状态,计算交通流的指标,例如,道路的通行速度、车辆的密度等。
4.判断停止条件:根据交通流模拟的目的,设定合适的停止条件。
例如,当交通流的指标达到一定阈值,或者模拟的时间达到一定限制时,停止模拟。
3.2 交通流模拟算法的改进在实际应用中,为了更好地模拟真实的交通流,研究者们不断地改进交通流模拟算法。
以下是一些常见的改进方法:1.多速度模型:传统的元胞自动机模型中,所有车辆的速度都是相同的。
而在实际交通流中,车辆的速度往往是不同的。
基于元胞自动机的交通流计算机模拟
以上演化步骤作为一个周期反复进行下去 ,它实际上描 述了较为接近实际的高速公路上车辆的运动状况 。
ABSTRACT: Cellular automata models quantize comp lex behavior into simp le individual components. In general, CA are idealization of physical system s in which both space and time are assumed to be discrete and each of the inter2 acting units can have only a finite number of discrete states. Based on the cellular automata theory, this paper de2 scribes the moving character of vehicles in traffic flow as changing rules of cellular automation, thus traffic flow simu2 lation models based on cellular automation are p resented. After calibrating the basic parameters such as cellular length, maximum speed and so on, this paper first discusses and establishes the traffic cellular automation on traffic simulation; secondly analyzes the updating rule and establishes a traffic simulation model for single lane; thirdly, a computer simulation system is fulfilled w ith all cellular automation models in C language. The simulating result ac2 cords to real traffic flow. KEYWO RD S: Traffic cellular automation; Traffic flow; Cellular automation model; Simulation; Involving rule
双向航道船舶交通流元胞自动机模型及仿真
双向航道船舶交通流元胞自动机模型及仿真摘要:船舶交通流的研究对于提高海上交通运输效率,保障航行安全具有重要意义。
双向航道是船舶交通流的研究热点之一,本文基于元胞自动机理论,建立了双向航道船舶交通流模型,并进行了数值仿真。
仿真结果表明,该模型可以有效地模拟双向航道船舶交通流的行为特征,有助于研究航道交通流的规律及管理方法。
1. 引言船舶交通流是指在特定水域内,船舶按照一定的规律和要求进行航行活动的总体现象。
研究船舶交通流的规律、特征以及影响因素,对于优化航道规划、提高航行安全、保障海上交通运输效率具有重要意义。
双向航道是指具有明确来往航道的水域,其中船舶在双向航道内按照规定的单向行驶规则进行航行。
双向航道的研究对于理解航道交通流的运动规律、规划航道的合理性具有重要意义。
元胞自动机是一种离散动力学系统模拟方法,它将研究对象划分为若干个相互作用的离散单元,每个单元称为元胞,通过定义元胞之间的相互作用规则,模拟系统的演化过程。
元胞自动机在复杂系统建模与仿真中具有广泛的应用,包括交通流动、城市交通规划等领域。
本文基于元胞自动机理论,建立了双向航道船舶交通流模型,并进行了数值仿真。
通过仿真分析,探讨了双向航道船舶交通流的行为特征及规律,为航道管理与规划提供了一定的理论参考。
2.1 模型基本思想双向航道船舶交通流模型的建立基于元胞自动机理论,将航道划分为若干个相互作用的离散单元,每个单元即为一个元胞。
元胞内的船舶按照一定的规则进行运动,与相邻元胞内的船舶进行交互。
通过定义船舶的运动规则、交互规则等,模拟双向航道内船舶的运动过程。
2.2 模型参数及规则定义(1)船舶状态参数:每个元胞内的船舶根据其状态可以分为航行、停泊、起锚等状态。
船舶状态参数是描述船舶当前状态的重要参数。
(2)船舶运动规则:船舶的运动规则是描述船舶在双向航道内按照一定的单向行驶规则进行航行的规则。
包括船舶的加速度、减速度、转向规则等。
(3)交互规则:船舶在双向航道内存在交叉、超车等交互行为,交互规则是描述船舶与相邻元胞内的船舶进行交互的规则。
基于元胞自动机的电动自行车交通流仿真建模
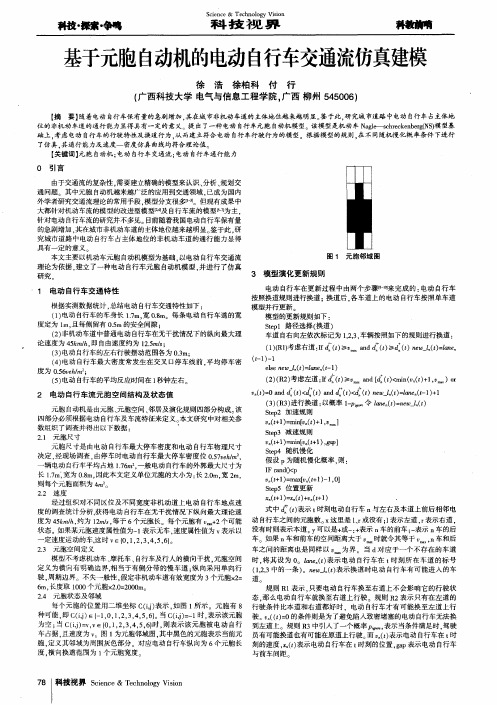
位 的非机动车道的通行能力显得具有一定的意义。提 出了一种 电动 自行车元胞 自动机模型。该模 型是机动车 N a g l e —s c h r e c k e n b e r g ( N S ) 模型基 础上 , 考虑 电动 自行车的行驶特性及换道行为 , 从 而建立符合电动 自行 车行驶行为的模 型。根据模型的规则, 在 不同随机慢化概率条件 下进行 了仿 真 , 其 通 行 能 力及 速度 一 密度 仿 真 曲线 均 符合 理 论 值 。
V n ( t ) = O a n d d( ) < ( )a n d ( ) < ( t )n e w _ l , ( t ) = l a n e ( t - 一 1 ) + 1 ( 3 ) ( R3 ) 进行换道 : 以概率 1 叩 令 l a n e ( ) = n e 』 ( £ ) S t e D 2 加速规则 v , A ( 抖1 ) = m i n [ v , ( f ) + 1 , 一] S t e p 3 减速规则
1 电 动 自行 车 交 通 特 性
_
度为 0 . 5 6 v e h l m :
e l s e n e w
_
l  ̄ ( ) = Z ∞ ( 一 1 )
( 5 ) 电动 自行车 的平均反应时间在 1 秒钟左右
( 2 ) ( R 2 ) 考 虑 左 道: I i n ( v ( £ ) + l , ) 0 r
一
假设 P为随机慢化概率 , 则:
I F r a n d O < p V n ( + 1 ) = m a x [ v ( £ + 1 ) 一 1 , 0 ] S t e p 5位 置更新
基于元胞自动机的事故交通流模型仿真
基于元胞自动机的事故交通流模型仿真刘霞;胡凯;龚鹏【摘要】针对发生事故的双车道模型,考虑行驶车辆是否在事故车道以及距离事故的远近,分析不同区域的换道特点,建立双车道元胞自动机模型.在开放边界条件下,改变进口车辆的驶入率和事故的持续时间,得到了车流量和平均车速的变化曲线,结果表明,在发生交通事故时应缩短事故处理时间,并将入口车辆进入率降至一定值.%A two-lane cellular automaton model was established under the traffic accident.Considering whether the vehicle is in the accident lane and the distance from the accident, different characteristics of lane change were analyzed.In the open boundary conditions, traffic flow, density and average speed were analyzed by changing the entry rate of the imported vehicles and duration of the accident.The results show that the accident processing time should be shortened and the entry rate of vehicle should be reduced to a certain value in the case of traffic accidents.【期刊名称】《解放军理工大学学报(自然科学版)》【年(卷),期】2017(018)003【总页数】4页(P285-288)【关键词】元胞自动机;交通流;交通事故;双车道【作者】刘霞;胡凯;龚鹏【作者单位】江汉大学物理与信息工程学院,湖北武汉 430056;江汉大学物理与信息工程学院,湖北武汉 430056;江汉大学物理与信息工程学院,湖北武汉430056【正文语种】中文【中图分类】TP391元胞自动机是一种时空离散的动力学模型,通过一定形式的规则网格将空间分割成许多元胞,这些元胞根据确定的局部规则作同步更新,从而构成整个动态系统的演化。
用于模拟单车道交通流的改进NS元胞自动机模型_杨梦龙
收稿日期:2007-08-10。
基金项目:国家863计划项目(2006AA12A104)。
作者简介:杨梦龙(1983-),男,四川成都人,硕士研究生,主要研究方向:交通流与红绿灯控制、复杂网络; 刘怡光(1972-),男,四川内江人,教授,博士,主要研究方向:神经计算、神经网络动力学、模式识别、计算智能、智能交通系统。
文章编号:1001-9081(2007)11-2630-02用于模拟单车道交通流的改进NS 元胞自动机模型杨梦龙,刘怡光(四川大学图形图像研究所,成都610064)(steinbeck @163.co m )摘 要:研究改进了基于元胞自动机的一维NS 交通模型,细化了元胞长度和时间步长,对静止车辆的加速能力进行了约束,用简单的方法解决了该模型中车辆的速度演化规则与前车速度无关的缺点。
同时,考虑了交通密度对随机慢化概率的影响。
计算机仿真表明:改进模型不仅得到了一些与其他元胞自动机模型共有的性质,且得到的基本图更加接近实测数据。
关键词:交通流;元胞自动机;NS 模型中图分类号:TP391.9 文献标识码:AI mproved NS cell ular auto maton modelfor si m ulati ng traffic fl o w s of one -laneYANG M eng -long ,LI U Y-i guang(Institute of Image and Graphics ,S ichuan U ni ver sity,Chen gdu Sichuan 610064,China )Abstract :W e i m proved t he N age -l Schreckenberg (N S)ce ll u l a r auto m aton m ode l for one -lane traffi c flo w s .A cell u l ar ofNS m ode lw as d i v i ded i nto t w o ,so d i d the ti m e step .O n the other hand ,that the acce l e ra tion ability of a stock-still car w as weake r than that of the runni ng one w as cons i de red .F urt her m ore ,t he re l a ti ons h i p bet w een rando m ization dece lera ti on probab ility and the traffic density was taken i n t o account .By computer s i m u l a tions ,som e basic qua litative resu lts and the fundam enta l d iag ram o f the proposed m odel w ere obta i ned .Co m pared w ith other m ode ls ,the fundam enta l diag ram of the proposed model is mo re rea listi c .K ey words :traffi c fl ow ;ce ll u l a r auto m a t on ;N S m ode l0 引言近年来,交通问题被广泛地研究[1-3],目前有微观和宏观两类研究模型。
考虑反馈条件的元胞自动机交通流的建模与仿真
考虑反馈条件的元胞自动机交通流的建模与仿真姜茹嫣;孟思梦;冯明兵【摘要】将NS模型中存在的车辆倒退现象以及刹车过急等与实际交通状况不相适应的地方进行改进,提出了反馈形式的交通流元胞自动机模型,该改进NS模型引入了前车状态的变化量以及一套全新的速度更新规则来模拟交通流的变化.仿真试验证明该模型更加符合实际交通基本特征,同时该模型使车流总体增大,也成为后续模型的基础模型.【期刊名称】《山东交通学院学报》【年(卷),期】2015(023)001【总页数】5页(P21-25)【关键词】交通流;NS模型;反馈型元胞自动机模型【作者】姜茹嫣;孟思梦;冯明兵【作者单位】重庆交通大学交通运输学院,重庆400074;重庆交通大学交通运输学院,重庆400074;重庆交通大学交通运输学院,重庆400074【正文语种】中文【中图分类】U49.1由于元胞自动机[1]简单易于实现,近年来对元胞自动机理论的研究越来越多,尤其在交通领域,不仅有大量的理论研究还建立了许多应用模型,德国物理学家NAGEL K和SCHREKENBERG M建立的NS模型是可以重现道路交通流基本特征的最小化模型。
但是在NS模型中没有考虑前后车辆的影响,也就是说在t+1时刻第i辆车的速度只决定于t+1时刻第i辆车与前车之间的距离,而与t+1时刻前车移动的距离无关。
虽然也有学者考虑了前车的移动量,但是在具体的模型模拟过种中存在一些不足,为了克服NS模型的不足,建立了反馈型元胞自动机模型,并用计算机进行模拟,得出交通流元胞自动机的一些特征[2-3]。
作为184号模型的推广,1992年德国学者NAGEL[4-6]和SCHRECKENBERG[7-9]提出了一种新的元胞自动机模型即著名的NS模型,该模型将随机慢化概率引入模型中,相对于之前的184号模型更贴合实际也打破了原来最大速度只能为1的局限。
NS模型中时间、空间以及速度都被整数离散化。
道路被划分为离散的格子,每个元胞或者为空或者被1辆车占据,为了便于规则演化,设vi(t)表示第i辆车在t时刻的速度,xi(t)表示第i辆车在t时刻的位置,每辆车的速度可以取0,1,2,……,vmax,vmax为车辆的最大速度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
}
}
//计算平均速度
v=(float)s/n/(T-TBEGIN);
//记录数据
FILE *fp;
if( ( fp = fopen("记录.txt","ab") ) == NULL )
//计算、记录平均速度
float caculate(int n)
{
long s=0,i,j;
float v=0;
for(i=TBEGIN;i<T;i++)
for(j=0;j<Lane;j++)
{
if( cars[i][j] >= 0 )
{
s+=cars[i][j];
下的车流平均速度。
*/
#incluБайду номын сангаасe<stdio.h>
#include<time.h>
#include<string.h>
#include <stdlib.h>
#include<graphics.h>
#define Lane 1000
#define TBEGIN 2000
{
if( cars[i][j] >= 0 )
{
v=cars[i][j];
gap=FindFront(i,j); //与前车距离
//printf("weizhi: %d sudu:%d gap:%d\n",j,cars[i][j],gap);
//速度更新
{
location=rand()%1000;
if( cars[0][location] ==-1)
{
cars[0][location]=rand()%(Vmax+1);
}
else
i--;
}
//debug
/*for(j=0;j<Lane-1;j++)
void main()
{
int i,j;
float v;
srand(time(NULL));
for(i=10;i<=1000;i+=10) //不同车辆数目
{
initcars(i);
move();
v=caculate(i);
//printf("车辆数为%d时的平均速度为:%.2f\n",i,v);
}
}
}
}
//计算与前车距离
int FindFront(int i,int j)
{
int front=0;
while( cars[i][(++j)%1000] == -1 )
{
front++;
}
return front;
}
if( cars[0][j] >=0 )
printf("%d %d\n",j,cars[0][j]);*/
}
//车辆运动
void move()
{
int i=0,j,x,v,gap;
for(i=0;i<T-1;i++)
for(j=0;j<Lane;j++)
fclose(fp);
return v;
}
}
}
//初始化道路车辆
void initcars(int n)
{
int i,j,location,speed;
for(i=0;i<T;i++)
for(j=0;j<Lane;j++)
cars[i][j]=-1;
//赋初值
for(i=0;i<n;i++)
{
printf("error");
exit(2);
}
else
{
fprintf(fp,"密度:%3d 速度%.2f ",n,v);
char line[] = "\r\n";
fwrite(line, strlen(line), 1, fp);
}
if( (v+1) <= Vmax)
v++;
if( v > gap )
v = gap;
if( v>0 && ( rand()%100 <= P*100 ) )
v--;
//位置更新
x=v+j;
x=x%1000;
/* 元胞自动机的NS交通流模型
简要说明:将7.5km的道路离散为1000个7.米长的格子,每个格子或为空或为车辆占据,车辆的速度v为0~Vmax之间的值,
每辆车遵循同一规则运动,即:1、加速min(v+1,Vmax);2、减速max(与前一辆车的距离,v);3、以概率p,v=v-1;
4、车辆位置更行 x(t+1)=x(t)+v(t+1)。仿真采用周期性边界,即头围相接形成一个环路。仿真得到不同车辆密度
//printf("\n%d %d\n",x,v);
if( cars[i+1][x] == -1 )
{
cars[i+1][x]=v;
}
else
{
printf("撞车啦,第%d秒,第%d格\n",i,j);
exit(1);
#define T 3000
#define Vmax 5
#define P 0.5
void initcars(int );
void move();
float caculate(int );
int FindFront(int ,int );
int cars[T][Lane]; //定义数组