Current Sensing Completion Detection for Subthreshold Asynchronous Circuits
Detector Electronics GT3000 Series Safety-Certifie
SAFETY MANUALElectrochemical Gas DetectorGT3000 SeriesIncludes T ransmitter (GTX)with H 2S or O 2Sensor Module (GTS)SAFETY CERTIFIED GT3000 SERIES ELECTRoChEMICAL GAS DETECToRThis manual addresses the specific requirements and recommendations applicable to the proper installation, operation, and maintenance of all Safety-Certified (SIL -Certified) GT3000 Electrochemical Gas Detector product versions. For complete information regarding system overview, performance, installation, operation, maintenance and specifications of the GT3000 Series, refer to instruction manual 95-8616.QUALITY PoLICY STATEMENTAll quality assurance control measures necessary for safety management as specified in IEC 61508 Part 1 have been implemented. The quality management system of Det-Tronics is based on the requirements of EN ISO 9001 and AN SI/ASQC Q9001 through the application of the United Technologies Company Achieving Competitive Excellence (ACE) program. In addition, the Quality Management System complies with the European ATEX Directive requirements per EN 13980, the International Electrotechnical Commission requirements per OD005/V2, and the supervised testing requirements per ISO 17025.SAFETY MESSAGESProcedures and instructions in this section may require special precautions to ensure the safety of personnel performing the operations. Information that raises potential safety issues is indicated by the word “Warning”. Always read and understand these safety messages.WARNINGThe GT3000 Electrochemical Gas Detector is intended for use in hazardous environments that may include explosive levels of flammable gases and vapors. This product must be properly installed, operated and maintained. Improper installation or use could result in an explosion or fire resulting in death or serious injury.• Do not remove the cover of a junction box in explosive environments when device power is on and circuits are live.• Device must be properly installed to meet hazardous area explosion-proof/non-incendive and intrinsic safety requirements.Sensor Module (GTS)Transmitter (GTX)Detector (GT3000)DESIGNThe GT3000 Electrochemical Gas Detector is an intelligent stand-alone industrial gas detector, designed to provide continuous monitoring of the atmosphere for hazardous gas leaks or oxygen depletion. The GT3000 Gas Detector consists of a replaceable sensor module (Model GTS) connected to a transmitter module (Model GTX). The GT3000 is a 2-wire device that generates a 4-20 mA output signal with HART communication that is proportional to the concentration of the target gas. The GT3000 is compatible with FlexVu® Model UD10 and UD20 Universal Display Units, as well as other devices that are able to monitor a linear 4-20 mA dc signal. All alarm functions are provided by the monitoring device.The GT3000 is classified as Type B smart element according to IEC61508. The GT3000 contains self-diagnostics and sends the current output to a specified failure state upon internal detection of a failure (see GT3000 instruction manual for details).Safety-Certification of the GT3000 Series Electrochemical Gas Detector includes:• the 4-20 mA output of the GTX in combination with H 2S or O 2 GTS modules.Non-Interfering outputsSafety Certification of the GT3000 includes the following non-interfering outputs:- LEDs and magnetic switches - HART communicationThe HART communication protocol is non-interfering and is to be used for diagnostics within the SIL 2 safety loop in the Safety operation mode. Diagnostics are defined as read only information. Local HART communication with the GT3000 using a handheld HART field communicator, or AMS program connected to the 4-20 mA output, is acceptable. Proper analog signal loop resistance must be installed as documented in the instruction manual to enable local HART communication.The UD20 is a loop-powered device that is approved for use in-line with a Safety-Certified GT3000. The GT3000 comes with one of two pre-programmed fault output levels: 2.45 mA or 3.5 mA. The UD20 must only be used in conjunction with 3.5 mA fault level GT3000 versions.VALID INPUT RANGEGT3000 fault annunciation is provided on the 4-20 mA signal output loop by signaling to a specific mA current output level. The receiving device must be programmed to indicate a fault condition when current levels reach under-current of 3.6 mA or less or over-current of 21 mA or more.NOTEThe GT3000 analog sig nal is not safety-rated during detector warm-up or calibration mode. Alternative means should be used at the job site to ensure facility safety during these activities. DIAGNoSTIC RESPoNSE TIMEThe GT3000 will perform all critical diagnostic functions within one hour, worst case diagnostic detection time.CERTIFICATIoNThe GT3000 Safety-Certified version is certified byexida ® to IEC61508 for single input use in low demand, SIL 2 Safety Instrumented Systems.SAFETY-CERTIFIED PRoDUCT IDENTIFICATIoN Safety Certification of all GT3000 models meeting SIL 2 safety standards is clearly identified on the product label.INSTALLATIoNNOTEFor complete information regarding performance,installation, operation, maintenance and specifications of the GT3000 Series, refer toinstruction manual 95-8616.N o special or additional detector installation requirements exist above and beyond the standard installation practices documented in the GT3000 instruction manual.The operating temperature range for the Safety Certified GT3000 depends on the specific sensor being used. Refer to the GT3000 instruction manual for details. Other environmental operating specifications are applicable as published in the general specifications section in the GT3000 instruction manual.The GT3000 operating power distribution system should be designed and installed so the GT3000 terminal voltage does not drop below 12 Vdc when measured at any specific location. The external system providing power to the GT3000 must have over-voltage protection that ensures supply voltage does not exceed 30 Vdc.NOTEAll safety functions of the GT3000 are activewithin 150 seconds of power-up without any useraction required.CoMMoN MISUSE SCENARIoSRefer to the Installation and Maintenance sections of the instruction manual for information on avoidance and resolution of common misuse scenarios. Applications to avoid include the following:- Locations where impact or other excessive mechanical stress is likely.- Locations where regular contamination from debris, trash, snow, mud, etc. is likely to contact the sensor. - Horizontal mounting of the GT3000 (see DEVICE MOUNTING ORIENTATION section of the GT3000Instruction Manual).- Locations where sensor cross-sensitivity to other gases will be a problem (see Appendix A of the GT3000 Instruction Manual for details).NOTEIf the user suspects that damage or misuse hasoccurred to the GT3000, a full proof test shall beperformed.START-UP AND CoMMISSIoNINGCommissioning PersonnelThe Safety Certified GT3000 Gas Detector can be commissioned by any qualified person with knowledge of gas detection instruments and the configuration device being used.Refer to the Installation and Calibration sections provided in the GT3000 instruction manual.ConfigurationA HART handheld device can be used to monitor internal status or to modify the factory settings of the GT3000. Refer to the GT3000 HART Communication section of the instruction manual for guidance on using HART communication.NOTEPrior to device config uration all alarm outputsmust be bypassed. The device is not safetycertified during configuration change activities.NOTEAll configuration changes to the GT3000 must beverified by the user via a proof test, power cycleand re-check of setting s, or other appropriatemethod.Configuration ProtectionUpon completion of installation and commissioning, it is required that the user password-protect the GT3000 safety related parameters that are accessible via HART in order to prevent accidental or deliberate change of configuration data during normal operation. To password protect the GT3000, the user must set the write-protect function to “on” and enter an 8 character password.The user will be required to disable write protect prior to any future configuration changes, and must re-enable write protect upon completion of these changes to ensure that HART communication remains non-interfering.oPERATIoN, MAINTENANCE, INSPECTIoN AND PRooF TESTINGAll normal installation and field calibration recommendations as documented in the GT3000 instruction manual are applicable to the Safety Certified GT3000 Gas Detector.Safety-Certified GT3000 gas detectors require Proof testing to be performed in all cases.Personnel performing Proof Test procedures shall be competent to perform the task. All proof test results must be recorded and analyzed. Any corrective actions taken must be documented in the event that an error is found in the safety functionality. The Proof tests must be performed at a frequency as shown in Table 1.WARNINGFailure to perform the specified testing andinspection may lower or void the SIL rating for theproduct or system.VISUAL FIELD INSPECTIoN PRooF TESTTools Required: NoneVisual inspection of all Safety-Certified GT3000 gas detectors shall be conducted as needed to confirm that no external blockage of gas/vapor path into the sensing chamber exists, eg. debris, trash, snow, mud, external equipment, etc. Corrective action shall include removal of such impediments should they exist. All gas detectors must be inspected to ensure that they are capable of providing expected performance and protection.Completion of Visual Field Inspection Proof test must be recorded and documented in the SIS logbook.RESPoNSE PRooF TESTTools Required: Compressed Calibration Gas Kitprovided by Det-TronicsThis proof test, commonly referred to as a “gas bump test”, requires application of high accuracy compressed calibration gas to the detector while in NORMAL operational mode and inspecting the signal output level to ensure that the signal output is accurately indicative of the applied test gas concentration.WARNINGAny external alarm equipment, systems or sig naling devices that could be automaticallyinitiated by performing this test must be disabledor bypassed before performing this test!Proof Test Sequence1. Inhibit alarm and fault response at the controldevice.2. Apply calibration test gas to the sensor.3. Verify correct change of state at the control devicefor the GT3000 4-20 mA output. Criteria for the 4-20 mA inspection pass is a response signal within ±10% for H2S and ±0.5% V/V for O2 of applied gas concentration (generally, a 50% full scale test concentration is applied).4. Remove the test gas and ensure that the unit returnsto normal operation.5. Re-activate alarm and fault response at the controldevice.If response test is not within acceptable limits or fails for any reason, a Full Calibration procedure must be performed and the Proof Test re-performed.GT3000 Proof Test Name Commissioning FrequencyVisual Field Inspection Proof T est Y es As needed, depending on level and type of contaminants presentResponse Proof T est Y es 1 yearTable 1—Frequency for Performing Proof TestsCalibrationTools Required: Compressed Calibration Gas Kitprovided by Det-TronicsMagnet or HART Communicator Calibration shall be conducted when required as documented in the Calibration section of the GT3000 instruction manual. It is permissible to conduct the calibration using either the onboard magnetic calibration switch or using an approved HART handheld field communicator. In all cases the GT3000 and attached transmitter should be allowed to warm up for one hour minimum before conducting calibration. Completion of the Response Proof Test must be recorded and documented in the SIS logbook.WARNINGAny external alarm equipment, systems or sig naling devices that were disabled must bere-activated at the conclusion of proof testingactivities.FAULT/FAILURE ACTIoN PLANIn the event that a Calibration does not result in an acceptable Response Proof test, then the standard Maintenance and Device Repair and Return procedures as listed in the GT3000 instruction manual must be followed. Any failure to successfully complete the Response Proof Test must be recorded and documented in the SIS logbook.PRoDUCT REPAIRField repair of the GT3000 is limited to replacement of the filter and/or sensor module. All other device repairs must be conducted at the factory. No firmware changes are permitted or authorized. All failures detected by the device diagnostics or by the Proof Tests that cannot be resolved through the procedures described in the FAULT/FAILURE ACTION PLAN section must be reported to the manufacturer.oPERATING, ENVIRoNMENTAL, AND PERFoRMANCE SPECIFICATIoNSThe Safety-Certified GT3000 product versions fully comply with, and must be operated in accordance with the functional, environmental, and performance specifications provided in the GT3000 instruction manual. A 24 hour mean time to repair should be assumed for safety availability calculations. All GT3000 diagnostics have a maximum one hour test interval.SPARE PARTSRefer to “Ordering Information” in the GT3000 instruction manual. Safety Certification is based on a sufficient number of spares to achieve a 24 hour mean time to repair.CERTIFICATIoN AND FAILURE RATE DATA All Safety-Certified GT3000 Gas Detectors are certified compliant to:IEC61508: 2010Type B ElementSystematic Capability: SIL 2 certified HFT: 0Low Demand ModePFDavg should be calculated for any safety instrumented function using the GT3000. (Refer to FMEDA report for necessary information, including DU rate.)Safety Accuracy:±10% of applied gas concentration.Safety Response Time: Depends on sensor modulebeing used. Refer to GT3000 instruction manual for details.Product Life:3-5 years, based on manufacturer data.All failure rate data for SIL verification is in the FMEDA report, which is available upon request.ADDITIoNAL CERTIFICATIoNSFM, CSA, ATEX, IECEx, CE, and others.Refer to the GT3000 Instruction Manual for details.For complete information regarding performance, installation, operation, maintenance and specifications of the GT3000, refer to instruction manual 95-8616.TERMS AND DEFINITIoNS AMS Asset Management SystemFMEDA Failure Mode Effects and Diagnostics AnalysisHART Highway Addressable Remote TransducerHFT Hardware Fault Tolerance LFL Lower Flammable Limit V/V Percent by volumePFD Probability of Failure on Demand (Probability of Dangerous Failure)PFDavg Average Probability of Failure on DemandSFF Safe Failure Fraction SIF Safety Instrumented Function SIL Safety Integrity Level SIS Safety Instrumented SystemGT3000Electrochemical Gas Sensor(consists of one GTX Transmitter and one GTS Sensor Module)Devicel sdl su 2l ddl duSFF 3GT3000 Analog Output with O 2 Sensors 0243312314196.0%GT3000 Analog Output with H 2S Sensors 0199313627592.4%GT3000 Analog Output with H 2S+ Sensors0194315127192.5%FlexVu™ Universal Display UD20 adder 4543619–IEC 61508 Failure Rates in FIT 11 FIT = 1 Failure / 109 Hours2 It is important to realize that the No Effect failures are no longer included in the Safe Undetected failure category according toIEC 61508, ed2, 2010.3 Safe Failure Fraction needs to be calculated on (sub)system level.4 Add these FITs to any GT3000 version above when UD20 is used.C orporate office6901 West 110th Street | Minneapolis, MN 55438 USAOperator: 952.941.5665 or 800.468.3244Customer Service: 952.946.6491 or 800.765.3473 |Email:***************************Specifications subject to change without notice.All trademarks are the property of their respective owners. © 2015 Detector Electronics Corporation. All rights reserved.。
IEEEStdC57.124-1991
IEEE Std C57.124-1991Reconized as an American National Standard (ANSI)IEEE Recommended Practice for theDetection of Partial Discharge and the Measurement of Apparent Charge inDry-Type TransformersSponsorTransformers Committeeof theIEEE Power Engineering SocietyApproved June 27, 1991Reaffirmed February 6, 1997Institute of Electrical and Electronics EngineersApproved October 11, 1991Reaffirmed September 19, 1996American National Standards InstituteAbstract: IEEE Std C57.124-1991 covers the detection of partial discharges occurring in the insulation of dry-type transformers of their components and the measurement of the associated apparent charge at the terminals when alternating test voltage is applied. The wideband method is used. The detection system and calibrator characteristics are described, and the test procedure is established.Keywords: Apparent charge, corona, cost coil transformers, dry-type transformers, partial discharge, ventilated dry-type transformersThe Institute of Electrical and Electronics Engineers, Inc.345 East 47th Street, New York, NY 10017-2394, USACopyright © 1992 byThe Institute of Electrical and Electronics Engineers, Inc.All rights reserved. Published 1992Printed in the United States of AmericaISBN 1-55937-159-5No part of this publication may be reproduced in any form, in an electronic retrieval system or otherwise, without the prior written permission of the publisher.IEEE Standards documents are developed within the Technical Committees of the IEEE Societies and the Standards Coordinating Committees of the IEEE Standards Board. Members of the committees serve voluntarily and without compensation. They are not necessarily members of the Institute. The standards developed within IEEE represent a consensus of the broad expertise on the subject within the Institute as well as those activities outside of IEEE that have expressed an interest in participating in the development of the standard.Use of an IEEE Standard is wholly voluntary. The existence of an IEEE Standard does not imply that there are no other ways to produce, test, measure, purchase, market, or provide other goods and services related to the scope of the IEEE Standard. Furthermore, the viewpoint expressed at the time a standard is approved and issued is subject to change brought about through developments in the state of the art and comments received from users of the standard. Every IEEE Standard is subjected to review at least every five years for revision or reaffirmation. When a document is more than five years old and has not been reaffirmed, it is reasonable to conclude that its contents, although still of some value, do not wholly reflect the present state of the art. Users are cautioned to check to determine that they have the latest edition of any IEEE Standard.Comments for revision of IEEE Standards are welcome from any interested party, regardless of membership affiliation with IEEE. Suggestions for changes in documents should be in the form of a proposed change of text, together with appropriate supporting comments.Interpretations: Occasionally questions may arise regarding the meaning of portions of standards as they relate to specific applications. When the need for interpretations is brought to the attention of IEEE, the Institute will initiate action to prepare appropriate responses. Since IEEE Standards represent a consensus of all concerned interests, it is important to ensure that any interpretation has also received the concurrence of a balance of interests. For this reason IEEE and the members of its technical committees are not able to provide an instant response to interpretation requests except in those cases where the matter has previously received formal consideration.Comments on standards and requests for interpretations should be addressed to:Secretary, IEEE Standards Board445 Hoes LaneP.O. Box 1331Piscataway, NJ 08855-1331USAIEEE Standards documents are adopted by the Institute of Electrical and Electronics Engineers without regard to whether their adoption may involve patents on articles, materials, or processes. Such adoption does not assume any liability to any patent owner, nor does it assume any obligation whatever to parties adopting the standards documents.Foreword(This foreword is not a part of IEEE Std C57.124-1991, IEEE Recommended Practice for the Detection of Partial Discharge and the Measurement of Apparent Charge in Dry-Type Transformers.)This recommended practice for measuring partial discharge of dry-type transformers was conceived for the purpose of establishing a standardized method for conducting partial discharge tests of dry-type transformers. The results of the tests may be compared with various transformer designs and manufacturers to establish a partial discharge limit for dry-type transformers.This recommended practice follows the format of IEEE Std 454, IEEE Recommended Practice for the Detection and Measurement of Partial Discharge (Corona) During Dielectric Tests, and IEEE Std C57.113, IEEE Guide for Partial Discharge Measurement in Liquid-Filled Power Transformers and Shunt Reactors. Sections on current detection were purposely omitted, as this technique is normally not used for dry-type transformers.There is no recognized definition of “partial discharge-free"”when referring to partial discharge inception voltage or extinction voltage. An arbitrary sensitivity of 10 pC is suggested until such time as a more definitive standard is established.Various specifications are already written specifying partial discharge-free transformers from 1.1 p.u. operating voltage to 2.0 p.u. operating voltage. It is the intent of this recommended practice to encourage manufacturers of dry-type transformers and users of dry-type transformers to investigate and report the results of factory tests and field experience of partial discharge in dry-type transformers. It is recognized that Paschen's Law applies to the partial discharge intensity and extinction voltage of dry-type transformers. It is conceivable that a dry-type transformer would test partial discharge-free at 1.65 p.u. voltage at room temperature and be barely partial discharge-free at operating temperature for a Class 220C. system. This correlation should be verified with field experience and reported.The guide specifies no particular discharge testing instruments and systems. Several commercially available units are being used. A measuring system of discreet components readily available has been used for measuring partial discharge. Most manufacturers' laboratories have partial discharge-free HV test sets and oscilloscopes. The only additional components required to complete the detection circuit are a partial discharge-free coupling capacitor composed of two 60 kV, .002 mfd capacitors in series, and an inductance composed of a coil of magnet wire. Calibration is accomplished using a calibrated square wave generator and a calibrated coupling capacitor of .0001 mfd.The following two test procedures are proposed:1)To test partial discharge between the coil and ground, normally accomplished during the applied voltage test.2)The test procedure takes place during the induced voltage test to detect partial discharge within a coil. It issuggested that partial discharge measurements be made in both modes. The partial discharge measurement may be made during the normal sequence of tests, while the applied and induced voltage tests are being made.An alternative sequence is to conduct the partial discharge test immediately following the applied voltage test and induced voltage test.The high-voltage bus bars of high-voltage transformers sometimes cause nondestructive partial discharge. This partial discharge in no way affects the reliability of the transformer coils. It may be necessary to disconnect the bus bar from the coils before conducting the partial discharge test on only the coils in order to test for partial discharge in the transformer coils. A note should be added to any test reports stating that the bus bar was removed for the test.At the time this document was submitted to the Standards Board, the Working Group on Recommended Practice for the Detection of Partial Discharges and the Measurement of Apparent Charge in Dry-Type Transformers had the following members:A.D. Kline, (Chairman)B. F. Allen Roy Bancroft D. A. Barnard A. Bimbiris M. Cambre O. R. Compton J. FrankE. Gearhart R. Hayes R. H. HollisterJ. W. HuppA.M. IversenA. J. JonnattiS. P. KennedyE. KoenigM. L. ManningR. A. MarekM. I. MitelmanJ. J. NayW. F. PattersonR. L. ProvostJ. RoddenV. ThenappanR. E. Uptegraff, Jr.G. H. VaillancourtH. J. WindischThe following persons were on the balloting committee that approved this document for submission to the IEEE Standards Board:E. J. Adolphsen L. C. Aicher D. J. AllanB. AllenR. Allustriarti M. S. Altman J. C. Arnold J. AubinR. Bancroft D. Barnard D. L. Basel P. L. Bellaschi S. Bennon W. B. Binder J. V. Bonucchi J. D. Borst C. V. Brown O. R. Compton F. W. Cook J. L. Corkran D. W. Crofts J. N. Davis D. J. Douglas R. F. Dudley J. C. Dutton J. K. Easley J. A. Ebert D. J. Fallon F. L. Foster M. Frydman H. E. Gabel R. E. Gearhart D. W. Gerlach D. A. Gillies R. S. Girgis R. L. GrubbF. J. GryszkiewiczG. HallJ. H. HarlowF. W. HeinrichsW. R. HenningD. R. HightonP. J. HoeflerC. HoeselR. H. HollisterC. C. HoneyE. HowellsC. HurryG. W. IliffY. P. IijimaR. G. JacobsenD.C. JohnsonD. L. JohnsonA. J. JonnattiC. P. KappelerR. B. KaufmanJ. J. KellyW. N. KennedyJ.P. KinneyB. KlaponskiA.D. KlineE. KoenigJ. G. LackeyR. E. LeeH.F. LightS.R. LindgrenL.W. LongL. A. LowdermilkR. I. LoweM. L. ManningH. B. MargolisT. MassoudaJ. W. MatthewsJ. McGillC. J. McMillenW. J. McNuttS. P. MehtaC. K. MillerC. H. MillianR. E. MinkwitzM. MitelmanH. R. MooreW. E. MorehartR. J. MuselW. H. MutschlerE. T. NortonR. A. OlssonB. K. PatelW. F. PattersonH. A. PearceD. PercoL. W. PierceJ. M. PollittC. P. RaymondC. A. RobbinsL. J. SavioW. E. SaxonD. N, SharmaV. ShenoyW. W. SteinL. R. StenslandD. SundinL. A. SwensonD. S. TakachV. ThenappanR. C. Thomas J. A. Thompson T. P. Traub D. E. Truax W. B. Uhl R. E. Uptegraff, Jr.G. H. VaillancourtA. VeitchL. B. WagenaarR. J. WheartyA. L. WilksW. E. WrennA. C. WurdackE. J. YasudaAt the time this recommended practice was published, it was under consideration for approval as an American National Standard. The Accredited Standards Committee on Transformers, Regulators, and Reactors, C57, had the following members at the time this document was sent to letter ballot:Leo J. Savio, ChairJohn A. Gauthier, SecretaryOrganization of Representative Electric Light and Power Group...............................................................................................P.E. OrehekS. M. A. RizviF. StevensJ. SullivanJ. C. ThompsonM.C. Mingoia (Alt.) Institute of Electrical and Electronics Engineers......................................................................J. D. BorstJ. DavisJ. H. HarlowL. SavioH. D. SmithR. A. VeitchNational Electrical Manufacturers Association........................................................................G. D. CoulterP. DeweverJ. D. DouglasA. A. GhafourianK. R. LinsleyR. L. PlasterH. RobinR. E. Uptegraff, Jr.P. J. Hopkinson (Alt.)J. Nay (Alt.) Tennessee Valley Authority.......................................................................................................F. A. Lewis Underwriters Laboratories, Inc.................................................................................................W. T. O'GradyUS Department of Agriculture, REA........................................................................................J. BohlkUS Department of Energy, Western Area Power Administration.............................................D. R. TorgersonUS Department of the Interior, Bureau of Reclamation............................................................F. W. Cook, Sr.US Department of the Navy, Civil Engineering Carps.............................................................H. P. StickleyWhen the IEEE Standards Board approved this standard on June 27, 1991, it had the following membership:Marco W. Migliaro, ChairDonald C. Loughry, Vice ChairAndrew G. Salem, SecretaryDennis BodsonPaul L. BorrillClyde CampJames M. Daly Donald C. Fleckenstein Jay Forster*David F. Franklin Ingrid Fromm Thomas L. HannanDonald N. HeirmanKenneth D. HendrixJohn W. HorchBen C. JohnsonIvor N. KnightJoseph Koepfinger*Irving KolodnyMichael A. LawlerJohn E. May, Jr.Lawrence V. McCAllT. Don Michael*Stig L. NilssonJohn L. RankineRonald H. ReimerGary S. RobinsonTerrance R. Whittemore*Member EmeritusAlso included are the following nonvoting IEEE Standards Board liaisons:Fernando Aldana Satish K. AggarwalJames Beall Richard B. EngelmanStanley Warshaw Deborah A. CzyzIEEE Standards Project EditorCLAUSE PAGE1. Scope (1)2. Purpose (1)3. References (1)4. Definitions (2)5. Partial Discharge Detection System (3)5.1High-Voltage Coupling Circuit (3)5.2Measuring Impedance Unit (Z m) (4)5.3Filter Characteristics (5)5.4Display Unit (5)5.5Discharge Meter (6)5.6Basic Sensitivity (6)5.7Partial Discharge Detector Basic Sensitivity Test (6)6. Calibrator Characteristics (6)6.1Calibrating Capacitor Value (C q) (7)6.2Pulse Generator Rise Time and Decay Time (7)6.3Pulse Generator Amplitude (U o) (7)6.4Pulse Generator Output Impedance (Z o) (7)6.5Calibrator Output Level Adjustment (7)6.6Pulse Generator Frequency (7)7. Tests (7)7.1General Requirements (7)7.2Conditioning (8)7.3Requirements for the Test Voltage (8)7.4Transformer Connections (8)7.5Significance of Various Test Connections (8)7.6Choice of Test Procedure (9)7.7Disturbances (10)8. Bibliography (18)Annex (informative) Partial Discharge Recognition (24)IEEE Recommended Practice for the Detection and the Measurement of Partial Discharge in Dry-Type Transformers1. ScopeThis recommended practice applies to the detection of partial discharges occurring in the insulation of dry-type transformers or their components, and to the measurement of the associated apparent charge at the terminals when an alternating test voltage is applied.2. PurposePartial discharge measurements in dry-type transformers may preferably be made on the basis of measurement of the apparent charge. Relevant measuring systems are classified as narrow-band or wide-band systems. Both systems are recognized and widely used. Without giving preference to one or the other, it is the object of this document to describe the wide-band method. General principles of partial discharge measurements, including the narrow-band method, are covered in IEEE Std 454-19731 [8]2, IEC 270 (1981) [6]3and IEC 76-3 (1980) [5].3. ReferencesThe following publications should be used in conjunction with this document. When the standards referred to in this guide are superseded by a new revision approved by the relevant standards authority, the latest revision should apply.[1] ANSI C68.1-1968, Standard for Measurement of Voltage In Dielectric Tests.41This standard has been withdrawn, however, copies are available from the Institute of Electrical and Electronics Engineers, Inc., Service Center, 445 Hoes Lane, Piscataway, N.J. 08855, U.S.A.2The numbers in brackets refer to those listed in Section 4.3IEC publications are available from IEC Sales Department, Case Postale 131, 3 rue de Varembé, CH 1211, Genève 20, Switzerland/Suisse. IEC publications are also available in the United States from the Sales Department, American National Standards Institute, 11 West 42nd Street, 13th Floor, New York, NY 10036, USA.4ANSI publications are available from the American National Standards Institute, 11 West 42nd Street, 13th Floor, New York, NY 10036.IEEE Std C57.124-1991IEEE RECOMMENDED PRACTICE FOR THE DETECTION OF PARTIAL DISCHARGE [2] ASTM D1868-81 (1990-E01), Method for Detection and Measurement of Partial Discharge (Corona) Pulses in Evaluation of Insulation Systems.5[3] ASTM STP-669, Engineering Dielectrics, Vol. 1, Corona Measurement and Interpretation.[4] CIGRE Working Group 21-03, "Recognition of Discharges," Electra, No. 11, pp. 61-98, Dec, 1969.6[5] IEC 76-3 (1980), Power Transformers, Part 3: Insulation Levels and Dielectric Tests.7[6] IEC 270 (1981), Partial Discharge Measurements.[7] IEEE Std 436-1991, IEEE Guide for Making Corona (Partial Discharge) Measurements of Electronics Transformers (ANSI).8[8] IEEE Std 454-1973, IEEE Recommended Practice for the Detection and Measurement of Partial Discharge (Corona) During Dielectric Tests.[9] IEEE Std C57.113-1991, IEEE Guide for Partial Discharge Measurement in Oil-Filled Power Transformers and Shunt Reactors (ANSI).4. Definitionspartial discharge: A partial discharge within the terms of this document is an electric discharge that only partially bridges the insulation between conductors. The term “corona ” has also been used frequently with this connotation. Such usage is imprecise and is gradually being discontinued in favor of the term “partial discharge.”apparent charge (terminal charge): The apparent charge (q) of a partial discharge is that charge which, if it could be injected instantaneously between the terminals of the test object, would momentarily change the voltage between its terminals by the same amount as the partial discharge itself. The apparent charge should not be confused with the charge transferred across the discharging cavity in the dielectric medium. Apparent charge within the terms of this document is expressed in coulombs, abbreviated C. One pC is equal to 10-12 coulombs.repetition rate(n).: The partial discharge pulse repetition rate (n) is the average number of partial discharge pulses per second measured over a selected period of time.acceptable terminal partial discharge level: The acceptable terminal partial discharge level is that specified maximum terminal partial discharge value for which measured terminal partial discharge values exceeding the said value are considered unacceptable. The method of measurement and the test voltage for a given test object should be specified with the acceptable terminal partial discharge level.voltage related to partial discharges: Voltage within the terms of this document is the phase-to-ground alternating voltage for applied tests (Fig 1) or terminal to terminal alternating voltage for induced voltage tests (Fig 8). Its value is expressed by its peak value divided by the square root of two.partial discharge inception voltage: The lowest voltage at which partial discharges exceeding a specified level are observed under specified conditions when the voltage applied to the test object is gradually increased from a lower value. This voltage is expressed as the peak value divided by the square root of two.5ASTM publications are available from the American Society for Testing and Materials, Customer Service Dept., 916 Race Street, Philadelphia, P.A. 19103, U.S. A.6CIGRE publications are available from the International Conference on Large-Voltage Electric Systems, 112 Boulevard Haussman, F-75008 Paris, France.7IEC publications are available from IEC Sales Department, Case Postale 131, 3 rue de Varembé, CH 1211, Genève 20, Switzerland/Suisse. IEC publications are also available in the United States from the Sales Department, American National Standards Institute, 11 West 42nd Street, 13th Floor, New York, NY 10036, USA.8IEEE publications are available from the Institute of Electrical and Electronics Engineers, Inc., Service Center, 445 Hoes Lane, Piscataway, N.J. 08855, U.S. A.partial discharge extinction voltage: The voltage at which partial discharges exceeding a specified level cease under specified conditions when the voltage is gradually decreased from a value exceeding the inception voltage. This voltage is expressed as the peak value divided by the square root of two.partial discharge-free test voltage: The partial discharge-free test voltage is a specified voltage, applied in accordance with a specified test procedure, at which the test object should not exhibit partial discharges above the acceptable energized background noise level.energized background noise level: The energized background noise level stated in pC is the residual response of the partial discharge measurement system to background noise of any nature after the test circuit has been calibrated and the test object is energized at a maximum of 50% of its nominal operating voltage.acceptable energized background noise level: The acceptable energized background noise level present during test should not exceed 50% of the acceptable terminal discharge level, and in any case, should be below 100 pC (5 pC if an acceptable terminal discharge level of 10 pC is required.)5. Partial Discharge Detection System(Figs 9 and 10 taken from ASTM STP669)The partial discharge detection system comprises the following components:1) a high-voltage coupling circuit (C1, C v)2) a measuring impedance unit (Z m consisting of R m, C2 and L)3)an amplifier and filter circuit4) a display unit5) a discharge meter6) a calibrator (C q, V l)7) a source filter (Z optional)5.1 High-Voltage Coupling CircuitThe purpose of the high-voltage coupling circuit is to allow the connection of the measuring impedance (Z m) to the high-voltage terminal of the transformer under test. In other types of high-voltage equipment, a single, low-capacitance high-voltage capacitor is usually used for this purpose, but in transformers, the equivalent terminal capacitance is usually very low, so a substantial amount of signal is normally produced by partial discharge of only a few pC, and measurement sensitivity is not a problem. At the same time, due to standing waves within the winding, a certain amount of signal cancellation may occur if the bandwidth is not sufficiently wide. Therefore, to insure that the input circuit of the partial discharge detection system does not act as a differentiator and reduce the total bandwidth of the system, it has been found that a high value for the coupling capacitor is necessary to produce a long-time constant of the input circuit. Even then, however, the low equivalent terminal capacitance of the transformer, usually less than 500 pF, will limit this time constant and it may not be possible to make it sufficiently long. Therefore, the use of a single coupling capacitor is not recommended. On the other hand, a satisfactory time constant can always be obtained by using a second capacitor (C2) as part of the measurement impedance, and this is the recommended method.As shown in Figs 9 and 10, high-voltage capacitor C1, and low-voltage capacitor C2, will form a voltage divider. This voltage divider will reduce the sensitivity of the measurement. To make sure that both the sensitivity is still sufficient and the time constant is sufficiently long, the values of C1, C2, and L should respect the conditions below:(1)≥C1100pF(2)where R m is the parallel resistive part of the measuring impedance unit (Z m ). The value of R m should be determined from the particular partial discharge instrument that is used.Example:For f L = 70kHz ,R m = 2.5k Ω and C 1 = 100pFA value of 1000 pF may be chosen for C 2 since 1000 pF ≥ 909 pF and (3)In cases where an RLC measurement impedance is used, the value of L should satisfy the equation below. This will ensure that the measurement bandwidth is unaffected by the presence of L .(4)If the transformer to be tested is fitted with a capacitive bushing tap, then this can be used directly as the high-voltage coupling circuit, and a separate coupling capacitor C 1 is not needed.5.2 Measuring Impedance Unit (Z m )The measuring impedance unit (Z m ) is located physically close to the high-voltage coupling circuit and serves two main purposes:1)It attenuates the test voltage present on the high-voltage coupling circuit to a safe value for measurement of partial discharge signals;2)It matches the amplifier and filter circuit to the high-voltage coupling circuit in insuring a fiat frequencyresponse across the full measurement bandwidth.The measuring impedance unit (Z m )should be configured in such a way as to permit test voltage level monitoring and to observe the phase relationship between the test voltage and the partial discharge pulses; this technique helps to identify the nature of the discharges.As shown in Figs 9 and 10, capacitor C v , whose capacitance value should be chosen to be at least 500 times that of C 1,may be placed in either one of the following two positions:1)In series with inductor L (Fig 9 or 10), or 2)In series with the low-voltage side of high-voltage capacitor C 1 (Fig 10.)C 212llf L R m -------------------≥C 216.28x 70000x 2500,----------------------------------------------909pF ==1000100-----------1015≤=L 25006.28x 70000,------------------------------- 5.7mH ==C 2C 1------15≤L R m 2llf L -----------≥Figure 9 shows the preferred position for C v since the input impedance of the display unit does not shunt the measurement impedance and can be neglected. However, some voltage will reach the input of the amplifier and filter circuit and may cause it to saturate. This voltage can be decreased by increasing the value of C v until it is less than 5V . If saturation occurs, a 20 nF low-voltage capacitor may be placed in series with the input of the amplifier and filter circuit as shown to decouple voltage at the excitation frequency.In the cases where one can not be absolutely certain that saturation of the amplifier will not occur, it is then advised to place C v in the position shown in Fig 10. The impedance of the display circuit will now shunt the measurement impedance and its input capacitance will need to be considered to calculate the value of C 2, as it will add to it.5.2.1 Lower and Upper Cut-Off Frequencies (f L and f H )The lower and upper cut-off frequencies f L and f H , respectively, are the frequencies at which the response to a constant sinesoidal input voltage has fallen by 6 db from the maximum value occurring inside the recommended bandwidth.f L should be located in the range from 70 to 120 kHz to minimize the effect of winding attenuation on partial discharge signals, and at the same time, to provide adequate rejection of SCR-generated noise present in manufacturing plants.An upper limit on f H of 300 kHz is usually necessary to prevent broadcast stations from interfering with the partial discharge measurement.5.3 Filter CharacteristicsThe filter characteristics of the partial discharge detection circuit should be such as to provide attenuation of at least 50db at 25 kHz, of at least 60 db at 15 kHz and below, and of at least 20 db at 500 kHz and above, with respect to the response at the geometric mean frequency (f C ) of the system pass bandwidth that is given by:The filter may be combined with an amplifier to form an active filter. Care should be taken to prevent the saturation of the filter input by the presence of the applied test voltage.5.3.1 Bandwidth ∆fThe bandwidth ∆f is defined as:∆f = f H − f LThe bandwidth should not be less than 100 kHz. A wider bandwidth provides a response whose level is less sensitive to the location of a partial discharge pulse along a transformer winding and is, therefore, more uniform. A bandwidth wider than 100 kHz is preferable, but may lead to background noise problems.5.3.2 LinearityThe instrument circuit, display unit, and discharge meter should be linear within plus or minus 10% of full scale in the range of 50 to 1000 pC.5.4 Display UnitThe display unit should be a cathode ray oscilloscope with a linear, rectangular, or an elliptical time-base. In all cases,the time-base should be synchronized to the test voltage, and at least 98% of a full cycle should be displayed. The phase relationship of the partial discharges to the test voltage should be easy to determine. A suitable graticule should be provided.f c f L f H •().5=。
电动自行车驱动系统研究英文原文

The use of an axial ¯ux permanent magnet in-wheel direct drive in an electric bicyclePer Roger Johansen a,*,Dean Patterson b,1,Christopher O'Keefe b ,John Swenson ba Norwegian University of Science and Technology,Department of Electrical Power Engineering,N-7034Trondheim,Norwayb Northern Territory Centre for Energy Research,Northern Territory University,Darwin,NT 0909,AustraliaAbstractThe research described in this paper concentrates on the development of an electronic converter.Successful completion of this converter provides the ®nal component for the larger electric bicycle project.The controller developed for the bicycle is rated at 400W and is hard-switched.It uses MOSFETs as power switching devices.There are three Hall e ect sensors placed 120electrical degrees apart from each other in the motor for velocity and position sensing.The torque generated by the machine is controlled by hysteresis band current control.In order for the motor/controller to be commercially viable,particular attention was paid to the costs of the controller.The result,an e cient yet cheap controller.Measurement of e ciency is di cult in high performance power electronic controllers [Patterson DJA very high e ciency controller for an axial ¯ux permanent magnet wheel drive in a solar powered vehicle.2nd IEEE International Conference on Power Electronics Drives and Energy Systems for Industrial Growth,IEEE PEDES '98,Perth,30th November±3rd December,1998.].The paper includes discussion of a calorimetric method for measurement.72000Published by Elsevier Science Ltd.0960-1481/01/$-see front matter 72000Published by Elsevier Science Ltd.PII:S 0960-1481(00)00051-3Renewable Energy 22(2001)151±/locate/renene*Corresponding author.E-mail addresses:roger_johansen@;per.roger.johansen@scc.no (P.R.Johansen),patterson@.au (D.Patterson).1Tel.:+61-8-89-466365;fax:+61-8-89-466993.1.IntroductionIt is generally recognised that there is a need for new methods of a ordable,non-polluting personal transportation.The ®rst electric vehicle (EV)was produced in 1885,but during the last 100years there has been very little progress in the development of EVs.It is di cult to get the public to start using an EV if it is not very e cient.It is obvious that the bicycle is a well-understood and often used machine,but the electrical versions have had little commercial success over the past century.One reason is that the e ciency of the electrical bicycle has not yet reached the level that the public demands.By applying modern semiconductor technology and brushless permanent magnet technology,there is a possibility that the general public will adopt the new bicycle as an e cient means of non-polluting transport.Already there are many electric bicycles in the market.Most of them use a geared motor drive system.At the Northern Territory Center for Energy Research (NTCER),a three-phase axial ¯ux brushless DC ``in-wheel''direct drive motor has been designed,built and tested for the purpose of powering a standard bicycle [1],see Fig.1.In 1998,the designing of the controller was started.This development is still going on,but a prototype is being built with excellent testresults.Fig.1.The stator of the axial ¯ux permanent magnet in-wheel direct drive motor.A pencil is lying next to the stator to show the size.P.R.Johansen et al./Renewable Energy 22(2001)151±157152P.R.Johansen et al./Renewable Energy22(2001)151±157153 2.DC brushless motorThe motor was designed as an axial¯ux permanent magnet brushless direct drive DC motor.The motor was designed to drive the front wheel of a bicycle. The motor has a variable air gap that can change the motor's characteristics. By varying the air gap from1.1to1.6mm or2.1mm,the maximum torque decreases as the maximum speed increases.The line-to-line inductance was measured as290m H.3.Driver control and rangeThe control for the bike will be placed on the hand grip.The control will be implemented by a potentiometer regulating from0to12V.It was decided to use torque control rather than speed control for the bike.This is because it is easier to use even if it might be more complicated to design.The whole idea behind the bike was that it should still be a bicycle,and not a motorcycle.This means that pedalling still should be an ing speed control would make it harder to input pedal energy to the road,while using torque control would allow the electrical power to support the pedal power,and therefore,make the batteries last longer.The batteries used are2Â12V lead acid batteries.The capacity of these batteries is16Ah.Each battery weighs6.5kg.The dimensions are72mmÂ175 mmÂ167mm.An estimation of the bicycle's range,before the batteries have to be recharged, shows that without pedalling at25km/h it would take us to31km.If the bike is assisted by pedalling,the distance will be increased by41%.This gives us a distance of44km.These estimates will,of course,change with di erent terrain and climates.4.Controller designThe controller was designed as two separate modules:a signal processing module and a power processing module.This was done because of time limit for the construction of the prototype.These two modules can easily be implemented as one module to complete the controller for the bike.The controller block diagram is shown in Fig.2(see also Fig3).The power switches used are MOSFETs in TO-220packages.These are logic level N-channel enhancement mode power®eld e ect transistors produced with DMOS technology which gives superior switching performance and low R DS ON 10X2m O at208C and V GS 12V.In parallel to the switches,zener diodes have been connected to protect them from high-voltage spikes.The switches are driven by a three-phase bridge n-channel MOSFET driver IC,which is speci®cally targeted for PWM motor control.The driver has a built-in charge pump to drive the high-side MOSFETs.Power supplies were provided from a nominal 24V bus that could be as high as 28V on full ¯oat charge and as low as 21.6V with the batteries at the extreme end of their capacity.To supply the control section and the power section,a voltage regulator power supply was designed.A transformer was designed with one primary and four secondary windings.The secondary voltages provided were +15V,À15V and two 8V isolated.These voltages were regulated,using commercial regulators,to +12V and À12V to supply the control board.The two 8V isolated are regulated to two 5V supplies to power the isolation ampli®ers.To measure the motor current,a shunt resistor was used in phases R and S.This was connected to the isolation ampli®ers for motor phase current sensing,with the third phase current being derived from the other phases.A hysteresis band current control was implemented due to its simplicity and low costs.Thus,the switching frequency does not remain constant,but varies along the current waveform.The switching frequency depends on how fast thecurrentFig.2.Block diagram for motor controller.P.R.Johansen et al./Renewable Energy 22(2001)151±157154changes from the upper to the lower limit of the current band.The controller has a ripple band of 3A superimposed on an average current which is 7A under typical operating conditions.This results in a maximum switching frequency of 6.9kHz at half speed.At very low and very high speeds,the switching frequency is very low.This again means that the switching losses are low.Controller protection consists of over voltage and temperature sensors.The MOSFET driver has a disable input which when enabled sets all six outputs (gate signals)low.This disables the controller until the problem is recti®ed.Over temperature protection is implemented by mounting a precision-integrated circuit temperature sensor on the heatsink.This gives a linear 10mV/8C scale factor.The heatsink itself will operate as a hysteresis because of the time it takes for the temperature to change.As the temperature rises above 1208C,the current will be reduced to 25%of the current command.As temperature falls below 1208C,the current will return back to the given current command.The controller board itself is 200mm Â150mm.This will be mounted on a box.Instead of using a heatsink the MOSFETs are mounted on a line so that they can be connected to one of the sides of the box.This will,therefore,workasFig.3.A controller inside the (open)thermal closure.P.R.Johansen et al./Renewable Energy 22(2001)151±157155a heatsink.Due to the low losses in the MOSFETs,one side of the box will dissipate more heat than necessary.5.Current state of projectThe current state of the project is that the motor has been put in a hub ready for testing on the bike.The controller has not yet been fully tested.Di erent parts have been tested separately with the ®nal complete testing due within the next month.The principle of the controller has been tested in other controllers in which this one has been modelled.6.Loss measurementIt is well known that the measurement of high e ciencies in power electronics systems is di cult,and that the di culty increases as the e ciency increases.The technique planned to be used for the bike controller is simple,inexpensive and accurate.It relies on the very slow and stable heat ¯ow through the walls of a well-insulated container to some stable ambient temperature.The thermal closure is shown in Fig.3.The system is indirect,and is calibrated by introducing exact amounts of power as heat into the well-insulated volume containing the power electronic system,with the controller under test not operating.By applying a small fan,a very even internal temperature,and hence,very even and controlled heat e ux through the walls of the enclosure is established.The calibration heat is injected via a 20W power resistor attached to the heatsink (not visible)and powered from a separate external DC power supply.Steady-state internal temperatures are plotted against the known heat injection.The power electronic system is then run under normal operating conditions inside the enclosure,measuring the ®nal internal temperature achieved.The calibration curve (temperature rise above ambient vs.injected power)is then used to indirectly reveal the losses under normal operation.7.ConclusionsThe work on the electrical bicycle has been going on for almost a year,and although it has not progressed as ®rst estimated,it seems that the prototype will start running by the end of March 1999.P.R.Johansen et al./Renewable Energy 22(2001)151±157156P.R.Johansen et al./Renewable Energy22(2001)151±157157 AcknowledgementsThe authors would like to acknowledge Max Benyon's support throughout this project.References[1]O'Keefe CS.The design of an axial-¯ux brushless DC motor to power a standard pushbike,and arecumbent trike.Bachelor of Engineering Thesis at the Northern Territory University,Darwin,July 1998.。
Endress+Hauser Prosonic T系列产品说明说明书

Technical Information TI 246F/00/enApplicationThe Prosonic T is a compact ultrasonic transmitter for continuous non-contact level measurement in liquids and in coarse-grained or pelleted solids. The Prosonic T series consists of three transmitters, which can be equipped with one of several electronic modules,with graduated measuring ranges from 0.25 m (0.8 ft) upwards.•FMU 130, 230in coarse-grained solids (grain size from 4 mm/0.16 in) up to 2 m/6.6 ft in liquids up to 5 m/16.4 ft (2 wire instruments: 4 m/13 ft)•FMU 131, 231in coarse-grained solids (grain size from 4 mm/0.16 in) up to 3.5 m/11.5 ft in liquids up to 8 m/26.2 ft (2 wire instruments: 7 m/23 ft)•FMU 232in coarse-grained solids (grain size from 4 mm/0.16 in) up to 7 m/23 ft in liquids up to 15 m/49.2 ftAll transmitters are equipped with an integrated temperature sensor for time-of-flight compensation.Features and Benefits Fits exactly to the process•Threaded connections from G 11/2or 11/2NPT or flange 4" or DN 100•Fully rotatable housing•LEDs visible through housing cover allow quick monitoring of operational statusElectronics versions•FMU 130,131:2-wire loop-powered general approval for ATEX II 2 G EEx ia•FMU 230,231:2-wire loop-powered or 4-wire including mains power supply •FMU 232: 4-wire, optional approval for ATEX II 1/3 D including mains power supplyIntelligent operation and evaluation •Simple local push-button operation,with optional display•HART protocol for remote operation •Digital communication with PROFIBUS-PAHART is a registered trademark of the HART Communication FoundationUltrasonic Level Measurement prosonic T FMU 130, 131prosonic T FMU 230, 231, 232Compact transmitter for continuous,non-contact level measurementAvailable as a Smart transmitter orfor connection to process control systemsHauser+Endress The Power of Know HowMeasuring SystemThe Prosonic T compact ultrasonic transmitter is a complete measuring point within itself. The simplest version allows access to all functions required for basic operation. Calibration can be carried out using the four pushbuttons –,+, V , H on the instrument without the need for other equipment.With a plug-in display, the complete Endress+Hauser user matrix can be accessed.The basic functionality may beenhanced by other optional operating possibilities or integration into a process control system, e.g. via:•2-wire loop-powered 4…20 mA (Smart) with INTENSOR or HART protocol or for connection to PROFIBUS-PA bus systems•4-wire, with separate power supply,4…20 mA (Smart) with HART protocol2-wire 4…20 mA Loop-PoweredApplications in e.g. Storage VesselsFMU 130, FMU 131:Certificate ATEX II 2 G EEx ia FMU 230, FMU 231: Standard4-wire, 4…20 mASeparate Power SupplyApplications with Rapid Changes inFMU 230, FMU 231: Standard FMU 232: Optional ATEX II 1/3 D2Power supply via the transmitter power pack e.g.PLC,with FMU 130, 131 connection via the Ex isolator (Zener barrier:<30 V DC output voltage, <200 mA, <1 W):operation via handheld terminal (protocol:INTENSOR, HART)y FXN 671:operation via Rackbus or handheld terminal (protocol:INTENSOR)z Silometer FMX 770:operation via Commutec transmitter (protocol:INTENSOR){Connection to PROFIBUS-PA bus for up to 10 transmitters, operated by a PC|Commubox:interface to a PC for Smart transmitters, operated by a PC (protocol:INTENSOR, HART)Operation via HART protocol:point-to-point using handheld terminal or PC (Commubox)OperationProsonic T compact transmitters offer operation tailored to all level applications:•Local calibration or matrix operation by simply pressing buttons•Smart – remote operation and display via the handheld terminal•Comprehensive operating and display software for personal computer •Calibration in the control room via a Silometer FMX 770or FXN 671.Matrix OperationProsonic T can be operated by using the keyboard and display, a handheld terminal, a Silometer transmitter(FMX 770, FXN 671) or via a process bus. The identical operating matrice ensure that procedures are uniform and clear.Operation via DisplayParameters are entered and valuesdisplayed by using the four pushbuttons –,+,V ,H on the front panel of the device.The optional display provides access to the Endress+Hauser operating matrix and to a wide selection of additional functions.•The following application parameters are available:−Liquid−Rapid changes in levels of liquids −Measurement when mounted in the dome cover−Coarse-grained solids −Conveyor belt•Automatic suppression of three fixed target echoes•Linearisation (11 points)•First echo detection (double echo)•Automatic suppression of stirrer echoesOperation Without a DisplayThe basic functions of the Prosonic T can be set by using just the fourpushbuttons –, +, V , H on the front panel of the instrument.•Empty and full calibration•Parameter protection by entry locking3Local matrix operation via display Setting basic functions locally using four pushbuttonsPROFIBUS-PAThe PROFIBUS-PA is an open fieldbus standard for connecting sensors and actuators, which may also be inexplosion hazardous areas, to one bus cable. The two-wire sensors are supplied with power over the PROFIBUS-PA and the process information of the sensor is digitally transmitted.The number of instruments operated at one bus segment:•up to 10 for EEx ia applications •up to 32 for non-Ex applicationsOperation via Handheld Terminal With a handheld terminal,the Prosonic T can be configured,values displayed and additional functions activated from anywhere on the 4…20mA signal line.There are two versions:•Commulog VU 260 Z (INTENSOR)•Universel HART Communicator DXR 275Operation with Commubox Commubox FXA 191 connectsintrinsically safe Smart transmitters with INTENSOR or HART protocols to the RS 232 C serial interface of a personal computer, allowing remote operation by the Endress+Hauser Commuwin II operating program.4Connecting handheld terminalsConnecting the CommuboxA Prosonic T with the PROFIBUS-PA protocol allows:•local operation with display•matrix operation with a personal computer and the Commuwin II operating program running under MS Windows 3.11Installation Mounting•Always mount the sensor such that thedistance between it and the maximumproduct level exceeds the blockingdistance.The lower edge of thetransmitter should,however,projectbelow the roof of the tank or silo.Exception:mounting in a nozzle.•Never mount two Prosonic T in avessel because the instruments maynot function correctly.•Do not mount the sensor in the centre ofthe vessel roof.•Position the sensor at right angles tothe surface of the material.•Do not measure through the fillingcurtain.Blocking DistanceDue to the ringing time of the sensor, there is a zone immediately below it in which returning echoes cannot be detected. This so-called blocking distance determines the minimum distance between the sensor and the maximum level in the tank or silo (see Technical Data for values).Interference Suppression Interference echoes coming from internal fittings can be suppressed by using the fixed target suppression function. The signals are then no longer recorded or used for further processing. The ultrasonic pulse leaves the sensor as a narrow beam which widens with increasing distance from the device. Every object within this beam produces an interference echo which is received by the sensor.Mounting on a NozzleIf the maximum level to be measured falls within the blocking distance, the transmitter must be mounted on a nozzle.•No build-up should form in the nozzle.•The recommend nozzle dimensions are limits, within which the nozzle can vary. Check that the nozzle diameter is large enough, but keep the nozzle length to a minimum (see figure).•The inner surface of the nozzle should be as smooth as possible – no edges or welding seams.Other Types of Mounting•below left:mounting with welded sleeve •below right:mounting with counter nut5LD DDimensions without Display Counter nutMeasuring RangeThe maximum measuring range of the Prosonic T is limited by the conditions at the measuring point and the reflection characteristics of the product surface. Optimum conditions are achieved if:•the surface of the liquid is calm and without foam,•no large concentrations of vapour are present in the tank,•the solid material is hard andcoarse-grained,•no dust is present in the silo,•temperature layering in the tank or silo is low.Example for Calculating RangeCheck the factors affecting your measurement in the table to the right. Add up their attenuation values (dB).•Temperature difference in silo max. 40°C•Low amount of filling curtain in detection area•Surface of liquid with strong turbulenceSum of attenuation valuesRange below these factors thus approx. 5.8 m (19 in) with 2" sensor.Effects Attenuation(dB) Temperature layeringFor air temperature differencebetween sensor and productsurface up to 20°C (68°F)up to 40°C (104°F)up to 80°C (176°F)5 (10)10…20 Filling curtainOutside detection rangeSmall amount insidedetection rangeLarge amount insidedetection range5 (10)10…20 DustNoneSmall amountLarge amount55…10 Solids surfaceCoarse, hardSoft2020…40 Liquid surfaceCalmHeavy wavesVery turbulent (e.g. agitators)5 (10)10…20 FoamPlease consult Endress+HauserThe diagram shows ideal echo attenuation curves.x Move the ideal curve downwards corresponding to the sum of theattenuation values.y The maximum range is indicated at the intersection where the ideal curve and the interference level line meet.61Echo attenuation FMU 130, 131, 230, 231 Example for determining range35dBNoise level line1 m = 3.28 ft1 ft = 0.305 mEcho attenuation FMU 232Normal interference level 1/2“ sensorNormal interference levelNoise level lineElectrical Connectionx FMU 130, 131, 230, 231•2-wire »loop-powered«•Communication: INTENSOR or HARTy FMU 230, 231•4-wire, including mains power supplyz FMU 232•4-wire, including mains power supply{FMU 130, 131 PROFIBUS-PA•2-wire•Communication: PROFIBUS-PA •Current consumption:FMU 130, 131, 230, 231: 12 mA ±1 mA FMU 232: 16 mA ±1 mA•Please see also: TI 260F and BA 166FCablingFor FMU 130, 131, 230, 231 instruments with communication use screened commercial 2-wire cable for signal transmission or for FMU 230, 231, 2324-wire cable for signal transmission and power. Under certain circumstances, the digital communication signal may be affected if unscreened cable is used.7FMU 230 / 231FMU 130 /131R/2012182430750Load diagramTechnical dataGeneral SpecificationsApplicationOperation and System DesignInput VariablesOutput VariablesMeasuring AccuracyCommunication Interfaces8Application Conditions Orientation Perpendicular to the surface of the material1)Please check with Endress+Hauser before using sensors at higher temperatures and higher pressures.When sensors are subjected to high temperatures and pressures (with limiting conditions), it is recommended that the coupling (process connection) be tightened.Medium temperature range1)–40…+80°C (–40…+176°F) (built-in temperature sensor) Operating temperature range(electronics)–20…+60°C (–4…+140°F)Storage temperature range–40…+80°C (–40…+176°F)Operating pressure p abs1)Sensors with process connection G 11/2and G 2: 3 bar (43.5 psi)Sensor DN 100 or 4" with slip-on flange or mounting bracket: 2.5 bar(36.25 psi)Climatic class DIN / IEC 68 T2-30 DbType of protection (EN 60529)IP 67 (NEMA 6), with housing cover open IP 20Vibration resistance DIN IEC 68 T2-6 Tab.2.C (10…55 Hz, a = 0.15 mm, 3 x 100 cycles) Electromagnetic compatibilty(EMC)Emitted interference to EN 61326;Class B equipment; Immunity to interference to EN 61326;Annex A (industry sector) and NAMUR EMC Recommendation Explosion protection FMU 130/131 (2-wire Ex): ATEX II 2 G EEx ia IIC T6FMU 230/231 (2-wire not Ex and 4-wire): withoutFMU 232 (4-wire): ATEX II 1/3 DMechanical Design Construction Compact unit,Versions with threaded connection can be installed with 60 AF boxspanner,max. torque 15…20 Nm (11.1…14.8 ft lbs)Dimensions See »Dimensions« page 12Material Housing:threaded bossand sensor:PBT (fibre-glass reinforced, flame-retarded)PVDFfor FMU 232 UP (unsatured polyester); sensor diaphragm stainless steelSeals Between threaded boss and sensor, internal: EPDM sealon threaded boss, external: EPDM sealProcess connection FMU 130, FMU 230: G 11/2or 11/2-11.5 NPT threadFMU 131, FMU 231: G 2 or NPT 2-11.5 NPT threadFMU 232: DN 100 or 4" with slip-on flange or mounting bracket Cable entry Pg 16, Cable diameter 5…9 mm (0.2…0.35 in)Sleeves for connection thread G1/2,1/2NPT or M 20x1.5 suppliedCable2-wire:4-wire:Use standard screened 2-wire cableUse standard screened 4-wire cable for signal transmission and power supplyUnder certain circumstances, the digital communication signal may be affected if unscreened cable is used.Display and Operating Elements Display (LCD)4-character display, with segment display for currentDimension L x B x H: 40 x 20 x 10 mm(1.6 x 0.8 x 0.4 in)LEDs Red: indicates alarm or warningGreen: Indicates power on (with 4-wire versions only) and entryacknowledgementPower Supply AC voltagePower consumptionSwitch-on current 4-wire: 180…250 V AC; 90…127 V AC< 4 VA100 mA, pulse width half life time 70 msDC voltagePower consumption Switch-on current 4-wire: 18…36 V DC; 2-wire: 12…36 V DC < 2,5 W (4 wire instruments)7 A, pulse width half life time 2 msCurrent consumption PROFIBUS-PA devices FMU 130, 131, 230, 231: 12 mA ±1 mA FMU 232: 16 mA ±1 mARipple (Smart-devices)INTENSOR max. ripple (measured at 500Ω)0Hz…100Hz:U SS=30mV HART max.ripple(measured at500Ω)47Hz…125Hz:U SS=200mV max.noise(measured at500Ω)500Hz…10kHz:U eff.=2.2mVElectrical isolation The evaluation electronics is electrically isolated from the power supplyterminals with all 4-wire versions.Supplementary Documentation Prosonic T System Information SI 021F/00/enProsonic T Compact transmitter for limit detection Technical Information TI 247F/00/enPlanning notes PROFIBUS-PA Technical Information TI 260F/00/en9AccessoriesPlug-in Display•Order-No.: 942663-0000Slip-On Flange FAU 60for FMU 232 onlyOrder No.: FAU60-XOXAdapter Flange FAU 70 E for FMU X30, X31•Order No.: 942636-XXXXProtective Hood for Electronic HousingOrder No.: 942665-0000Adapter Flange FAU 70 A for FMU X30, X31•Order No.: 942636-XXXX10AInstallation Bracket for FMU X30, X31•G 11/2: A=55 mm (2.2 in) Order-No:942669-0000•G 2: A=66 mm (2.6 in) Order-No:942669-0001•Material: 1.4301(AISI 304)•suited for NPT as wellfor FMU 232•Order-No:942666-0000•(AISI 304)ISO 228Protective hood forelectronics housing with dimensions in mm (in)1/2- 11,51.4435 (AISI 316L)PPs (Polypropylene)Product Structure11Process Connection Versions with G or NPT ThreadsFMU 130:G 11/2or 11/2NPTRange:max.2 m/6.6 ft (solids) ormax.4 m/13.1 ft (liquids)FMU 131:G 2or 2 NPTRange:max.3.5 m/11.5 ft (solids) ormax.7 m/23 ft (liquids)Enter “Y ”for special certificates or communication mode.Process Connection Versions with G or NPT ThreadsFMU 230:G 11/2or 11/2NPTRange:max.2 m/6.6 ft (solids) or 2-wire:max.4 m/13.1 ft (liquids)4-wire:max.5 m/16.4 ft (liquids)FMU 231:G 2or 2 NPTRange:max.3.5 m/11.5 ft (solids) or 2-wire:max.7 m/23 ft (liquids)4-wire:max.8 m/26.2 ft (liquids)Enter “Y ”for special certificates or communication mode.Process Connection Versions:Flange DN 100 / PN 16Flange ANSI 4" / 150 psi Flange JIS 16K 100Range:up to 7 m/23 ft (solids) ormax.15 m/49.2 ft (liquids)Enter “9" for special display or housing versions.Dimensions TI 246F/00/en/07.03 CCS/CV8.0。
深圳市东成视讯科技有限公司 iDS-2CD7A46G0-IZHSY (2.8-12 mm) 网络摄像

Model iDS-2CD7A46G0-IZHSY (2.8-12 mm) Special Features DeepinViewImageImage Sensor1/1.8" Progressive Scan CMOS Max. Resolution2560 × 1440Video Compression H.265+/H.265/H.264+/H.264/MJPEGMin. Illumination Color: 0.0005 lux @ (F1.2, AGC ON); B/W: 0.0001 lux @ (F1.2, AGC ON), 0 lux with IRWDR140 dB Lens 2.8 to 12 mmFOV Horizontal FOV: 114.5° to 41.8°, Vertical FOV: 59.3° to 23.6°, Diagonal FOV: 141.1° to 48°Max. IR Range 50 mVCA Deep-learning-based algorithm: Multi-target-type Detection, Face Comparison,Face Capture, Face Recognition, Face Attributes, Perimeter Protection, Queue ManagementTraditional algorithm: Motion detection, Video tampering alarm, Exception detectionFrame Rate 50 Hz: 50 fps (2560 × 1440, 1920 × 1080, 1280 × 720)60 Hz: 60 fps (2560 × 1440, 1920 × 1080, 1280× 720)Streams5Protection Level IP67, IK10Angle Adjustment Bracket, pan: 0° to 355°,tilt: 0° to 90°, rotate:0° to 360°Model DS-2CD6924G0-IHS DS-2CD6D24FWD-IZSSpecial Features PanoVu PanoVuImageImage Sensor1/1.8" Progressive Scan CMOS1/2.7" Progressive Scan CMOSResolution3840 × 2160 (Panorama mode)1920 × 1080Video Compression H.265+ / H.264+ / H.265 / H.264 /MJPEGH.265+ / H.264+ / H.265 / H.264 /MJPEGMin. IlluminationColor: 0.003 lux @ (F1.2, AGC ON),B/W: 0.0018 lux @ (F1.6, AGC ON),0 lux with IRColor: 0.006 lux @ (F1.2, AGC ON),0.01 lux @ (F1.6, AGC ON)B/W: 0.002 lux @ (F1.2, AGC ON),0.003 lux @ (F1.6, AGC ON)0 lux with IR onWDR Digital WDR120 dBLens Four 2.8 mm/6 mm Four 2.8 to 12 mmFOV 2.8 mm: horizontal FOV 180°, vertical FOV 90°6 mm: horizontal FOV 180°, vertical FOV 25°Horizontal field of view: 30° to 96.3°Vertical field of view: 17° to 54°Diagonal field of view: 34° to 121°Max. IR Range20 m (Four IR LEDs)10 m to 30 mVCA-Line crossing detection, Intrusiondetection, Region entrance detection,Region exiting detection, Unattendedbaggage detection, Object removaldetectionFrame Rate 50 Hz: 25 fps (1920 × 1080, 1280 × 720)60 Hz: 30 fps (1920 × 1080, 1280 × 720)50Hz: 25 fps (1920 × 1080, 1280 × 960,1280 × 720)60Hz: 30 fps (1920 × 1080, 1280 × 960,1280 × 720)Streams23Protection Level IP67, IK10IP67, IK10Angle Adjustment Pan: 0° to 355°, tilt: 0° to 90°Four flexible lens in one track, sliderange: -180° to 180°, tilt: 0° to 135°,rotate: 0° to 355°Model DS-2SF8C442MXS-DLW(14F1) DS-2DF8C442IXS-AELW(T5)Special Features TandemVu Deep LearningImageImage Sensor[Bullet channel] 1/1.8" Progressive Scan CMOS,[PTZ channel] 1/1.8" Progressive Scan CMOS1/1.8" progressive scan CMOSMax. Resolution[Bullet channel] 2560 × 1440, [PTZ channel] 2560 × 14402560 × 1440Focal Length[Bullet channel] 4 mm, [PTZ channel] 6 to 252 mm 6 mm to 252 mm, 42× opticalAngle of View[Bullet channel]horizontal field of view: 89° ± 5°, vertical field of view: 45° ± 5°,diagonal field of view: 107° ± 5°,[PTZ channel]horizontal field of view: 59° to 2°, vertical field of view: 34.2° to 1.1°,diagonal field of view: 67.1° to 2.3°Horizontal field of view: 56.6° to 1.7° (wide-tele),Vertical field of view: 33.7° to 0.9° (wide-tele),Diagonal field of view: 63.4° to 1.9° (wide-tele)Min. Illumination[Bullet channel] Color: 0.0005 lux @ (F1.0, AGC ON), B/W: 0.0001lux @ (F1.0, AGC ON), 0 lux with light,[PTZ channel] Color: 0.0005 lux @ (F1.2, AGC ON), B/W: 0.0001 lux@ (F1.2, AGC ON), 0 lux with IRColor: 0.001 lux @ (F1.2, AGC ON),B/W: 0.0005 lux @ (F1.2, AGC ON), 0 lux with IRWDR[Bullet channel] 120 dB,[PTZ channel] 120 dB140 dBMax. IR Range Expansive night view with up to 30 m white light distanceand 300 m IR distance400 mVCABasic event:[PTZ channel] video tampering alarm[PTZ channel & bullet channel] alarm input and output, exceptiondetectionSmart event:[Bullet channel] audio exception detection, line crossingdetection, intrusion detection, region entrance detection, regionexiting detection[PTZ channel] audio exception detection, line crossing detection,intrusion detection, region entrance detection, region exitingdetectionBasic event:Audio exception detection, motion detection, video tamperingalarm, alarm input, alarm output, exception detectionSmart event:Line crossing detection, region entrance detection, unattendedbaggage detection, object removal detection, intrusion detection,region exiting detection, vandal-proof alarm, audio exception detectionSmart Tracking:Manual tracking, auto-trackingProtection LevelIP67 (IEC 60529-2013), TVS 6000 V lightning protection, surgeprotection and voltagetransient protection, IK10 (IEC 62262:2002)IP67 (IEC 60529-2013), 6000V Lightning Protection,Surge Protection and Voltage Transient ProtectionPan Range[PTZ channel] 0° to 360°360° endlessTilt Range[Bullet channel] 7° to 17°, [PTZ channel] -20° to 90°From -20° to 90°Pan Speed[PTZ channel] pan speed: configurable from 0.1° to 160°/s, presetspeed: 240°/s Configurable, from 0.1°/s to 210°/s; Preset Speed: 280°/sTilt Speed[Bullet channel] tilt speed configurable, [PTZ channel] tilt speed:configurable from 0.1° to 120°/s, preset speed 200°/s Configurable, from 0.1°/s to 150°/s; Preset Speed: 250°/sModel DS-2XS6A87G1-L/C32S80 (No battery) Special Features Solar-poweredImageImage Sensor1/1.2" Progressive Scan CMOS Max. Resolution3840 × 2160Video Compression Main stream: H.265Sub-stream: H.265/MJPEG*Full power mode: main stream supports H.265+Min. Illumination Color: 0.0005 lux @ (F1.0, AGC ON),B/W: 0 lux with white lightWDR120 dBLens Fixed focal lens, 2.8 and 4 mm optionalFOV 2.8 mm: horizontal FOV: 101.6°, vertical FOV: 52.4°, diagonal FOV: 124°4 mm: horizontal FOV: 88.2°, vertical FOV: 48.7°, diagonal FOV: 101.8°Max. IR Range30 mVCA Line crossing detection: up to 4 regions configurableIntrusion detection: up to 4 regions configurableRegion entrance detection: up to 4 regions configurableRegion exiting detection: up to 4 regions configurableUnattended baggage detection: up to 4 regions configurableObject removal detection: up to 4 regions configurableThe smart events are only supported under full power mode.Frame Rate 50 Hz: 12.5 fps (3840 × 2160, 2688 × 1520, 1920 × 1080, 1280 × 720)60 Hz: 15 fps (3840 × 2160, 2688 × 1520, 1920 × 1080, 1280 × 720)Multi-Streaming2 Protection Level IP67Operating Temperature Charging: -20 °C to 45 °C (-4 °F to 131 °F) Discharging: -20 °C to 60 °C (-4 °F to 140 °F)Operating Humidity≤ 95%Local Storage Built-in memory card slot, support microSD card, up to 256 GB;Built-in 64 GB eMMC storageInstallation Outdoor Model D S-2FSCH30Special Features Lithium BatteryImageBattery Type LithiumBattery Voltage 10.8 VCapacity 30 AhMax. Charging Voltage 12.6 VBattery Life More than 500 cyclesWeight Approx. 3.3 kg (7.3 lb.)Material Housing Aluminum AlloyDimensionBattery Dimension: 236 × 154 × 80 mm(9.29" × 6.06" × 3.15")Package Dimension: 280 × 170 × 218mm (11.02" × 6.69" × 8.58")Operating ConditionsCharging Condition: -20 °C to 45 °C (-4 °Fto 113 °F)Discharging Condition: -20 °C to 60 °C(-4 °F to 140 °F)Storage Conditions-20 °C to 60 °C (-4 °F to 140 °F)Protection IP68 (1.5 m, 72 h)Heater YesInterface 1 RS-485 (half duplex), Ø 5.5 mmcoaxial power plug, M8 aviation plugSolar Power ControllerMPPT solar power controllerFully charged voltage: 12.6 VDCMax. output current: 8 AModel DS-2XC6625G0-IZHRS (2.8-12 mm)(D)Special Features NEMA 4X, C5ImageImage Sensor1/1.8" Progressive Scan CMOSMax. Resolution1920 × 1080Video Compression H.265+/H.265/H.264+/H.264Min. IlluminationColor: 0.0005 lux @(F1.2, AGC ON)B/W: 0.0001 lux @(F1.2, AGC ON), 0 luxwith IRWDR120 dBLens 2.8 to 12 mmFOV F1.4: horizontal field of view,94.2° to 38.1°Max. IR Range 80 mVCALine crossing detection, intrusiondetection, region entrance detection,region exiting detection, unattendedbaggage detection, object removaldetectionFrame Rate50 Hz: 50 fps (1920 × 1080, 1280 × 960,1280 × 720)60 Hz: 60 fps (1920 × 1080, 1280 × 960,1280 × 720)Multi-Streaming3Protection Level IP67Model DS-2XE6422FWD-IZHRSSpecial Features ATEX, IECEx, C5, NEMA 4XImageImage Sensor1/1.8" Progressive Scan CMOSMax. Resolution1920 × 1080Video Compression H.265+ / H.265 / H.264+ / H.264 / MJPEGMin. Illumination Color: 0.0005 lux @(F1.2, AGC ON),B/W: 0.0001 lux @(F1.2, AGC ON), 0 lux with IRWDR120 dBLens 2.8-12 mm, 8-32 mmFOV2.8 mm to 12 mm: horizontal FOV: 94°to 38°, vertical FOV: 49.9° to 21.3°,diagonal FOV: 112.3° to 43.5°8 mm to 32 mm: horizontal FOV 42.5°to 15.1°, vertical FOV: 23.4° to 8.6°,diagonal FOV: 49.6° to 17.3°Max. IR Range 2.8 mm to 12 mm lens: up to 80 m8 mm to 32 mm lens: up to 150 mVCALine crossing detection: up to 4 linesconfigurableIntrusion detection: up to 4 regionsconfigurableRegion entrance detection: up to 4regions configurableRegion exiting detection: up to 4regions configurableUnattended baggage detection: up to 4regions configurableObject removal detection: up to 4regions configurableScene change detection: defocusdetectionFrame Rate 50 Hz: 25 fps (1920 × 1080, 1280 × 720)60 Hz: 30 fps (1920 × 1080, 1280 × 720)Multi-Streaming3Protection Level IP68。
超低功耗微型超声时间差测距传感器CH101说明书
CH101 Ultra-low Power Integrated Ultrasonic Time-of-Flight Range SensorChirp Microsystems reserves the right to change specifications and information herein without notice.Chirp Microsystems2560 Ninth Street, Ste 200, Berkeley, CA 94710 U.S.A+1(510) 640–8155Document Number: DS-000331Revision: 1.2Release Date: 07/17/2020CH101 HIGHLIGHTSThe CH101 is a miniature, ultra-low-power ultrasonic Time-of-Flight (ToF) range sensor. Based on Chirp’s patented MEMS technology, the CH101 is a system-in-package that integrates a PMUT (Piezoelectric Micromachined Ultrasonic Transducer) together with an ultra-low-power SoC (system on chip) in a miniature, reflowable package. The SoC runs Chirp’s advanced ultrasonic DSP algorithms and includes an integrated microcontroller that provides digital range readings via I2C.Complementing Chirp’s long-range CH201 ultrasonic ToF sensor product, the CH101 provides accurate range measurements to targets at distances up to 1.2m. Using ultrasonic measurements, the sensor works in any lighting condition, including full sunlight to complete darkness, and provides millimeter-accurate range measurements independent of the target’s color and optical transparency. The sensor’s Field-of-View (FoV) can be customized and enables simultaneous range measurements to multiple objects in the FoV. Many algorithms can further process the range information for a variety of usage cases in a wide range of applications.The CH101-00ABR is a Pulse-Echo product intended for range finding and presence applications using a single sensor for transmit and receive of ultrasonic pulses. The CH101-02ABR is a frequency matched Pitch-Catch product intended for applications using one sensor for transmit and a second sensor for receiving the frequency matched ultrasonic pulse.DEVICE INFORMATIONPART NUMBER OPERATION PACKAGECH101-00ABR Pulse-Echo 3.5 x 3.5 x 1.26mm LGA CH101-02ABR Pitch-Catch 3.5 x 3.5 x 1.26mm LGA RoHS and Green-Compliant Package APPLICATIONS•Augmented and Virtual Reality•Robotics•Obstacle avoidance•Mobile and Computing Devices•Proximity/Presence sensing•Ultra-low power remote presence-sensing nodes •Home/Building automation FEATURES•Fast, accurate range-finding•Operating range from 4 cm to 1.2m•Sample rate up to 100 samples/sec• 1.0 mm RMS range noise at 30 cm range•Programmable modes optimized for medium and short-range sensing applications•Customizable field of view (FoV) up to 180°•Multi-object detection•Works in any lighting condition, including full sunlight to complete darkness•Insensitive to object color, detects opticallytransparent surfaces (glass, clear plastics, etc.) •Easy to integrate•Single sensor for receive and transmit•Single 1.8V supply•I2C Fast-Mode compatible interface, data rates up to 400 kbps•Dedicated programmable range interrupt pin•Platform-independent software driver enables turnkey range-finding•Miniature integrated module• 3.5 mmx 3.5 mm x 1.26 mm, 8-pin LGA package•Compatible with standard SMD reflow•Low-power SoC running advanced ultrasound firmware•Operating temperature range: -40°C to 85°C •Ultra-low supply current• 1 sample/s:o13 µA (10 cm max range)o15 µA (1.0 m max range)•30 samples/s:o20 µA (10 cm max range)o50 µA (1.0 m max range)Table of ContentsCH101 Highlights (1)Device Information (1)Applications (1)Features (1)Simplified Block Diagram (3)Absolute Maximum Ratings (4)Package Information (5)8-Pin LGA (5)Pin Configuration (5)Pin Descriptions (6)Package Dimensions (6)Electrical Characteristics (7)Electrical Characteristics (Cont’d) (8)Typical Operating Characteristics (9)Detailed Description (10)Theory of Operation (10)Device Configuration (10)Applications (11)Chirp CH101 Driver (11)Object Detection (11)Interfacing to the CH101 Ultrasonic Sensor (11)Device Modes of Operation: (12)Layout Recommendations: (13)PCB Reflow Recommendations: (14)Use of Level Shifters (14)Typical Operating Circuits (15)Ordering Information (16)Part Number Designation (16)Package Marking (17)Tape & Reel Specification (17)Shipping Label (17)Revision History (19)SIMPLIFIED BLOCK DIAGRAMFigure 1. Simplified Block DiagramABSOLUTE MAXIMUM RATINGSPARAMETER MIN. TYP. MAX. UNIT AVDD to VSS -0.3 2.2 V VDD to VSS -0.3 2.2 V SDA, SCL, PROG, RST_N to VSS -0.3 2.2 V Electrostatic Discharge (ESD)Human Body Model (HBM)(1)Charge Device Model (CDM)(2)-2-5002500kVV Latchup -100 100 mA Temperature, Operating -40 85 °C Relative Humidity, Storage 90 %RH Continuous Input Current (Any Pin) -20 20 mA Soldering Temperature (reflow) 260 °CTable 1. Absolute Maximum RatingsNotes:1.HBM Tests conducted in compliance with ANSI/ESDA/JEDEC JS-001-2014 Or JESD22-A114E2.CDM Tests conducted in compliance with JESD22-C101PACKAGE INFORMATION8-PIN LGADESCRIPTION DOCUMENT NUMBER CH101 Mechanical Integration Guide AN-000158CH101 and CH201 Ultrasonic Transceiver Handling andAssembly Guidelines AN-000159Table 2. 8-Pin LGAPIN CONFIGURATIONTop ViewFigure 2. Pin Configuration (Top View)PIN DESCRIPTIONSPIN NAME DESCRIPTION1 INT Interrupt output. Can be switched to input for triggering and calibration functions2 SCL SCL Input. I2C clock input. This pin must be pulled up externally.3 SDA SDA Input/Output. I2C data I/O. This pin must be pulled up externally.4 PROG Program Enable. Cannot be floating.5 VSS Power return.6 VDD Digital Logic Supply. Connect to externally regulated 1.8V supply. Suggest commonconnection to AVDD. If not connected locally to AVDD, b ypass with a 0.1μF capacitor asclose as possible to VDD I/O pad.7 AVDD Analog Power Supply. Connect to externally re gulated supply. Bypass with a 0.1μFcapacitor as close as possible to AVDD I/O pad.8 RESET_N Active-low reset. Cannot be floating.Table 3. Pin DescriptionsPACKAGE DIMENSIONSFigure 3. Package DimensionsELECTRICAL CHARACTERISTICSAVDD = VDD = 1.8VDC, VSS = 0V, T A = +25°C, min/max are from T A = -40°C to +85°C, unless otherwise specified.PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITSPOWER SUPPLYAnalog Power Supply AVDD 1.62 1.8 1.98 V Digital Power Supply VDD 1.62 1.8 1.98 VULTRASONIC TRANSMIT CHANNELOperating Frequency 175 kHzTXRX OPERATION (GPR FIRMWARE USED UNLESS OTHERWISE SPECIFIED)Maximum Range Max Range Wall Target58 mm Diameter Post1.2(1)0.7mm Minimum Range Min Range Short-Range F/W used 4(2)cm Measuring Rate (Sample/sec) SR 100 S/s Field of View FoV Configurable up to 180º deg Current Consumption (AVDD +VDD) I SSR=1S/s, Range=10 cmSR=1S/s, Range=1.0mSR=30S/s, Range=10 cmSR=30S/s, Range=1.0m13152050μAμAμAμA Range Noise N R Target range = 30 cm 1.0 mm, rms Measurement Time 1m max range 18 ms Programming Time 60 msTable 4. Electrical CharacteristicsNotes:1.Tested with a stationary target.2.For non-stationary objects. While objects closer than 4cm can be detected, the range measurement is not ensured.ELECTRICAL CHARACTERISTICS (CONT’D)AVDD = VDD = 1.8VDC, VSS = 0V, T A = +25°C, unless otherwise specified.PARAMETERSYMBOL CONDITIONS MINTYP MAX UNITS DIGITAL I/O CHARACTERISTICS Output Low Voltage V OL SDA, INT,0.4 V Output High Voltage V OH INT 0.9*V VDD V I 2C Input Voltage Low V IL_I2C SDA, SCL 0.3*V VDDV I 2C Input Voltage High V IH_I2C SDA, SCL 0.7*V VDD V Pin Leakage Current I L SDA,SCL, INT(Inactive), T A =25°C±1μA DIGITAL/I 2C TIMING CHARACTERISTICSSCL Clock Frequencyf SCLI 2C Fast Mode400kHzTable 5. Electrical Characteristics (Cont’d)TYPICAL OPERATING CHARACTERISTICSAVDD = VDD = 1.8VDC, VSS = 0V, T A = +25°C, unless otherwise specified.Typical Beam Pattern – MOD_CH101-03-01 Omnidirectional FoV module(Measured with a 1m2 flat plate target at a 30 cm range)Figure 4. Beam pattern measurements of CH101 moduleDETAILED DESCRIPTIONTHEORY OF OPERATIONThe CH101 is an autonomous, digital output ultrasonic rangefinder. The Simplified Block Diagram, previously shown, details the main components at the package-level. Inside the package are a piezoelectric micro-machined ultrasonic transducer (PMUT) and system-on-chip (SoC). The SoC controls the PMUT to produce pulses of ultrasound that reflect off targets in the sensor’s Field of View (FoV). The reflections are received by the same PMUT after a short time delay, amplified by sensitive electronics, digitized, and further processed to produce the range to the primary target. Many algorithms can further process the range information for a variety of usage cases in a wide range of applications.The time it takes the ultrasound pulse to propagate from the PMUT to the target and back is called the time-of-flight (ToF). The distance to the target is found by multiplying the time-of-flight by the speed of sound and dividing by two (to account for the round-trip). The speed of sound in air is approximately 343 m/s. The speed of sound is not a constant but is generally stable enough to give measurement accuracies within a few percent error.DEVICE CONFIGURATIONA CH101 program file must be loaded into the on-chip memory at initial power-on. The program, or firmware, is loaded through a special I2C interface. Chirp provides a default general-purpose rangefinder (GPR) firmware that is suitable for a wide range of applications. This firmware enables autonomous range finding operation of the CH101. It also supports hardware-triggering of the CH101 for applications requiring multiple transceivers. Program files can also be tailored to the customer’s application. Contact Chirp for more information.CH101 has several features that allow for low power operation. An ultra-low-power, on-chip real-time clock (RTC) sets the sample rate and provides the reference for the time-of-flight measurement. The host processor does not need to provide any stimulus to the CH101 during normal operation, allowing the host processor to be shut down into its lowest power mode until the CH101 generates a wake-up interrupt. There is also a general-purpose input/output (INT) pin that is optimized to be used as a system wake-up source. The interrupt pin can be configured to trigger on motion or proximity.APPLICATIONSCHIRP CH101 DRIVERChirp provides a compiler and microcontroller-independent C driver for the CH101 which greatly simplifies integration. The CH101 driver implements high-level control of one or more CH101s attached to one or more I2C ports on the host processor. The CH101 driver allows the user to program, configure, trigger, and readout data from the CH101 through use of C function calls without direct interaction with the CH101 I2C registers. The CH101 driver only requires the customer to implement an I/O layer which communicates with the host processor’s I2C hardware and GPIO hardware. Chirp highly recommends that all designs use the CH101 driver.OBJECT DETECTIONDetecting the presence of objects or people can be optimized via software, by setting the sensor’s full-scale range (FSR), and via hardware, using an acoustic housing to narrow or widen the sensor’s field-of-view. The former means that the user may set the maximum distance at which the sensor will detect an object. FSR values refer to the one-way distance to a detected object.In practice, the FSR setting controls the amount of time that the sensor spends in the listening (receiving) period during a measurement cycle. Therefore, the FSR setting affects the time required to complete a measurement. Longer full-scale range values will require more time for a measurement to complete.Ultrasonic signal processing using the CH101’s General Purpose Rangefinder (GPR) Firmware will detect echoes that bounce off the first target in the Field-of-View. The size, position, and material composition of the target will affect the maximum range at which the sensor can detect the target. Large targets, such as walls, are much easier to detect than smaller targets. Thus, the associated operating range for smaller targets will be shorter. The range to detect people will be affected by a variety of factors such as a person’s size, clothing, orientation to the sensor and the sensor’s field-of-view. In general, given these factors, people can be detected at a maximum distance of 0.7m from the CH101 sensor.For additional guidance on the detection of people/objects using the NEMA standard, AN-000214 Presence Detection Application Note discusses the analysis of presence detection using the Long-Range CH201 Ultrasonic sensor.INTERFACING TO THE CH101 ULTRASONIC SENSORThe CH101 communicates with a host processor over the 2-wire I2C protocol. The CH101 operates as an I2C slave and responds to commands issued by the I2C master.The CH101 contains two separate I2C interfaces, running on two separate slave addresses. The first is for loading firmware into the on-chip program memory, and the second is for in-application communication with the CH101. The 7-bit programming address is0x45, and the 7-bit application address default is 0x29. The application address can be reprogrammed to any valid 7-bit I2C address. The CH101 uses clock stretching to allow for enough time to respond to the I2C master. The CH101 clock stretches before the acknowledge (ACK) bit on both transmit and receive. For example, when the CH101 transmits, it will hold SCL low after it transmits the 8th bit from the current byte while it loads the next byte into its internal transmit buffer. When the next byte is ready, it releases the SCL line, reads the master’s ACK bit, and proceeds accordingly. When the CH101 is receiving, it holds the SCL line low after it receives the 8th bit in a byte. The CH101 then chooses whether to ACK or NACK depending on the received data and releases the SCL line.The figure below shows an overview of the I2C slave interface. In the diagram, ‘S’ indicates I2C start, ‘R/W’ is the read/write bit, ‘Sr’ is a repeated start, ‘A’ is acknowledge, and ‘P’ is the stop condition. Grey boxes indicate the I2C master actions; white boxes indicate the I2C slave actions.Figure 5. CH101 I2C Slave Interface DiagramDEVICE MODES OF OPERATION:FREE-RUNNING MODEIn the free-running measurement mode, the CH101 runs autonomously at a user specified sample rate. In this mode, the INT pin is configured as an output. The CH101 pulses the INT pin high when a new range sample is available. At this point, the host processor may read the sample data from the CH101 over the I2C interface.HARDWARE-TRIGGERED MODEIn the hardware triggered mode, the INT pin is used bi-directionally. The CH101 remains in an idle condition until triggered by pulsing the INT pin. The measurement will start with deterministic latency relative to the rising edge on INT. This mode is most useful for synchronizing several CH101 transceivers. The host controller can use the individual INT pins of several transceivers to coordinate the exact timing.CH101 BEAM PATTERNSThe acoustic Field of View is easily customizable for the CH101 and is achieved by adding an acoustic housing to the transceiver that is profiled to realize the desired beam pattern. Symmetric, asymmetric, and omnidirectional (180° FoV) beam patterns are realizable. An example beam pattern is shown in the Typical Operating Characteristics section of this document and several acoustic housing designs for various FoV’s are available from Chirp.LAYOUT RECOMMENDATIONS:RECOMMENDED PCB FOOTPRINTDimensions in mmFigure 6. Recommended PCB FootprintPCB REFLOW RECOMMENDATIONS:See App Note AN-000159, CH101 and CH201 Ultrasonic Transceiver Handling and Assembly Guidelines.USE OF LEVEL SHIFTERSWhile the use of autosense level shifters for all the digital I/O signal signals is acceptable, special handling of the INT line while using a level shifter is required to ensure proper resetting of this line. As the circuit stage is neither a push-pull nor open-drain configuration (see representative circuit below), it is recommended that level shifter with a manual direction control line be used. The TI SN74LVC2T45 Bus Transceiver is a recommended device for level shifting of the INT signal line.Figure 7. INT Line I/O Circuit StageTYPICAL OPERATING CIRCUITSFigure 8. Single Transceiver OperationFigure 9. Multi- Transceiver OperationORDERING INFORMATIONPART NUMBER DESIGNATIONFigure 10. Part Number DesignationThis datasheet specifies the following part numbersPART NUMBER OPERATION PACKAGE BODY QUANTITY PACKAGING CH101-00ABR Pulse-Echo 3.5 mm x 3.5 mm x 1.26 mmLGA-8L 1,000 7” Tape and ReelCH101-02ABR Pitch-Catch 3.5 mm x 3.5 mm x 1.26 mmLGA-8L 1,000 7” Tape and ReelTable 6. Part Number DesignationCH101-xxABxProduct FamilyProduct Variant Shipping CarrierR = Tape & Reel 00AB = Pulse-Echo Product Variant02AB = Pitch-Catch Product VariantCH101 = Ultrasonic ToF SensorPACKAGE MARKINGFigure 11. Package MarkingTAPE & REEL SPECIFICATIONFigure 12. Tape & Reel SpecificationSHIPPING LABELA Shipping Label will be attached to the reel, bag and box. The information provided on the label is as follows:•Device: This is the full part number•Lot Number: Chirp manufacturing lot number•Date Code: Date the lot was sealed in the moisture proof bag•Quantity: Number of components on the reel•2D Barcode: Contains Lot No., quantity and reel/bag/box numberDimensions in mmDEVICE: CH101-XXXXX-XLOT NO: XXXXXXXXDATE CODE: XXXXQTY: XXXXFigure 13. Shipping LabelREVISION HISTORY09/30/19 1.0 Initial Release10/22/19 1.1 Changed CH-101 to CH101. Updated figure 7 to current markings.07/17/20 1.2 Format Update. Incorporated “Maximum Ratings Table” and “Use of LevelShifters” section.This information furnished by Chirp Microsystems, Inc. (“Chirp Microsystems”) is believed to be accurate and reliable. However, no responsibility is assumed by Chirp Microsystems for its use, or for any infringements of patents or other rights of third parties that may result from its use. Specifications are subject to change without notice. Chirp Microsystems reserves the right to make changes to this product, including its circuits and software, in order to improve its design and/or performance, without prior notice. Chirp Microsystems makes no warranties, neither expressed nor implied, regarding the information and specifications contained in this document. Chirp Microsystems assumes no responsibility for any claims or damages arising from information contained in this document, or from the use of products and services detailed therein. This includes, but is not limited to, claims or damages based on the infringement of patents, copyrights, mask work and/or other intellectual property rights.Certain intellectual property owned by Chirp Microsystems and described in this document is patent protected. No license is granted by implication or otherwise under any patent or patent rights of Chirp Microsystems. This publication supersedes and replaces all information previously supplied. Trademarks that are registered trademarks are the property of their respective companies. Chirp Microsystems sensors should not be used or sold in the development, storage, production or utilization of any conventional or mass-destructive weapons or for any other weapons or life threatening applications, as well as in any other life critical applications such as medical equipment, transportation, aerospace and nuclear instruments, undersea equipment, power plant equipment, disaster prevention and crime prevention equipment.©2020 Chirp Microsystems. All rights reserved. Chirp Microsystems and the Chirp Microsystems logo are trademarks of Chirp Microsystems, Inc. The TDK logo is a trademark of TDK Corporation. Other company and product names may be trademarks of the respective companies with which they are associated.©2020 Chirp Microsystems. All rights reserved.。
车载行车记录仪说明书

CONTENTSWHAT’S IN THE BOX (2)SAFETY PRECAUTIONS (2)INSTALLATION SAFETY WARNING (2)INSTALLATION SAFETY INSTRUCTIONS (3)PRODUCT INFORMATION (4)PRODUCT OVERVIEW (4)PRODUCT FEATURES (5)PRODUCT TECHNICAL SPECIFICATIONS (6)GETTING STARTED (7)EQUIPMENT INSTALLATION - PREPARATIONFOR INITIAL USAGE (7)MEMORY CARD OPTION (8)MEMORY CARD FORMATTING (8)SOFTWARE SETTING (9)LANGUAGE SETTING (9)TIME SETTING (9)MAIN FUNCTIONS AND BASIC OPERATIONSOF THE DEVICE (10)DEVICE POWER ON/OFF MODE (10)PARKING MONITORING MODE (10)VIDEO RECORDING MODE (11)PHOTOGRAPH MODE (12)PLAYBACK MODE (12)FILE MANAGEMENT (13)SPECIFICATIONS FOR SHORCUT KEY FUNCTIONS (14)DISCLAIMER (14)219354687101513141112PRODUCT TECHNICAL SPECIFICATIONSNote:HELLA reserves the rights of modification for design and specifications without further notice. If there is any difference, please subject to the actual device.EQUIPMENT INSTALLATIO N - PREPARATIO N FO R INITIAL USAGE1.Please fix the vehicle powerline according to the diagrambelow to avoid blockingvisibility during driving.It is better that the drivingvideo recorder be fixed at thefront of the interior mirror tohave a better recording angle.2. Please do not install the driving video recorder at any place that may distract the attention of the driver.SOFTWARE SETTINGMAIN FUNCTIONS AND BASIC OPERATIONSOF THE DEVICEDEVICE POWER ON/OFF MODEPARKING MONITORING MODEThis device has two parking monitoring mode which are P mode and T mode. The specific application and instructions are as follows:function will be activated upon vibration,and an icon ofthe screen. Start this function, and ifthe vehicle experience collision afterpower-off, the driving video recordertime-lapse video recording function.An icon ofscreen after this function is started. Thevideo recording will continually snap atthe speed of 1 shot per second, and laterVIDEO RECORDING MODEAfter starting up, video recording will commence. Video recording can be operated by pressing the OK button.PHOTOGRAPH MODEUnder the video recording mode, hold the menu button for 3 seconds to enter the Photograph Mode. Enter OK button to take one photo. Press menu button to enter main menu selection for option setting including image size, AWB (picture contrast), image quality, exposure adjustment and photo sensitivity, etc.PLAYBACK MODEUnder the stop status of video recording, press the Playback Mode button twice to switch to Playback Mode. Under thePlayback Mode, press the menu button for a list of operationincluding volume adjustment, delete, delete all files, protect and cancel a single file. If the current file is a video file, press OK button for play or pause on this device, press the Up/ Down button for the fast forward/ fast backward operations, press the menu button to stop and quit the current video playing.FILE MANAGEMENTSPECIFICATIONS FOR SHORCUT KEY FUNCTIONSNote: The on-state is “” under the menu setting and the off-state is “”.- This device is NOT intended to be used for illegal purposes; surveillance and shall not be used in any form as evidence for claim purposes.- Some countries prohibit drivers from mounting anything on the windshield, or restrict mounting to specific areas of the windshield. It is the owner’s responsibility to mount the device in compliance with local laws.- Errors may occur depending on the surrounding environment and the voltage of the car.- Company is not liable/responsible for non-recorded event, missing files, etc.目录包装盒中有哪些内容 (16)安全须知 (16)安装安全警告 (16)安装安全说明 (17)产品信息 (18)产品概述 (18)产品特性 (19)产品技术规格 (20)入门指南 (21)设备安装 - 初次使用准备 (21)储存卡选配 (21)储存卡格式化 (21)软件设定 (22)语言设定 (22)时间设置 (22)设备的主要功能及基本操作 (23)设备开启/关闭模式 (23)停车监控模式 (23)录影模式 (24)拍照模式 (25)回放模式 (25)文件管理 (26)快捷键功能说明 (26)免责声明 (27)219354687101513141112产品技术规格注意:HELLA保留设计和规格更改权,恕不另行通知。
得玛莎三代水光仪器电子注射器说明书使用手册
User’s Manual(K2017)1st Edition (4 Apr 17)本机器为医疗器械。
为了保证产品的安全使用,请您在使用之前仔细阅读说明书。
得玛莎三代的维修制度是根据优美医院有限公司的维修制度进行。
( www.umedis.kr )1. 产品介绍1.1 产品介绍DermaShine® PRO(得玛莎三代)是创新数字注射器系统(带吸螺杆多针)利用Dermashine 吸气。
多螺杆针由 9 根针组成,更容易嵌入硬注射部位。
得玛莎三代吸气通过提拉硬注射部位,使之得以方便注入。
过程同时进行,使注射出奇地容易和快速。
DermaShine® PRO的优点DermaShine® PRO注射器会在您所需的深度注入等量的药品。
(0-2 毫米)的注入点均匀分布。
①在1~2mm注射部位有效率地注入药品的DDS (Drug Delivery System)医疗器械。
②经过2年多的开发过程,生产出来了更安全更细节的高品质的水光机。
③9针使得处理的效率提高。
花费更少的时间 & 精力。
④缩短恢复时间 & 减轻疼痛,使病人的满意度最大化。
⑤治疗时间不超过7分钟。
⑥通过8ms素的的精细注射模式,提高操作者的便利性。
(取得专利)1.2 使用时注意事项1.使用前请仔细阅读说明书后使用2.药品注射器与灭菌注射器相连时,如果连接太紧,在注射过程中可能发生灭菌注射器与药品注射器分离或药品液体渗漏的情况3.使用抽吸器(Aspirator)时,因药物损失和 breeding 致使药物通过吸管进入注射器内,此情况可能导致本品出现故障,请在使用过程中或使用后随时检查液压阻尼器。
4.如将注射器向上方注射,其损失药品会流入至装置中,可能导致本品出现故障5.拔出电源线时,请握住电源插头将其拔出请勿直接拽拉电源线6.一次注射结束提示音-在 Auto-sensing(自动感应)/Auto-dose(自动剂量)/dose(剂量)等模式下结束药物注射时,注射器自身将会发出声响并停止注射。
50V64-743 Integrated Furnace Control 安装说明书
If in doubt about whether your wiring is millivolt, line, or low volt-age, have it inspected by a qualified heating and air conditioning contractor or licensed electrician.Do not exceed the specification ratings.All wiring must conform to local and national electrical codes and ordinances.This control is a precision instrument, and should be handled carefully. Rough handling or distorting components could cause the control to malfunction.FAILURE TO READ AND FOLLOW ALL INSTRUCTIONS CAREFULL Y BEFORE INSTALLING OR OPERATING THIS CONTROL COULD CAUSE PERSONAL INJURY AND/OR PROPERTY DAMAGE.CONTENTSDescription .............................................................1Precautions ............................................................1Specifications .........................................................2Operation ................................................................2Installation ..............................................................5 Mounting & WiringThe 50V64-743 is a two-stage automatic gas interrupted ignition control employing a microprocessor to continually monitor, analyze, and control the proper operation of the gas burner and inducer, and provide signal for proper operation of variable fan speed timing.Signals interpreted during continual surveillance of the two-stage thermostat and flame sensing element initiate automatic ignition of the burner, sensing of the flame, and system shutoff during normal operation.The control incorporates system fault analysis for quick gas flow shutoff, coupled with automatic ignition retry upon sensing a fault correction.PART NO. 37-7565A1503 DESCRIPTIONPRECAUTIONS2SPECIFICATIONSOPERATIONOPTION SWITCHESSwitches on the 50V64-743 control are used to control functions of the circulator blower. Switches labeled SW3 and SW4 control the circulator blower speed. Switch labeled SW2 controls the heat delay-to-fan-off period. The following table shows the time periods that will result from the various switch positions.50V64TIMING SPECIFICATIONS(All times are in seconds, unless noted otherwise)PRE-PURGETRIAL FOR IGNITION PERIODIGNITION ACTIVATION PERIOD RETRIESVALVE SEQUENCE PERIOD INTERPURGE POST-PURGE LOCKOUT TIMEHEAT DELAY-TO-FAN ON HEAT DELAY-TO-FAN OFF*COOL DELAY-TO-FAN OFF*ELECTRONIC AIR CLEANER HUMIDIFIER0522 times 156052584560/100/ 140/180N/A YES YES* These times will vary depending on option switch position. See OPERATION section for further information.ELECTRICAL RATINGS [@ 77°F (25°C)]:Input Voltage: 25 VAC, 60 HzMax. Input Current @ 25 VAC: 525mA + MV Relay Load Ratings:Gas Valve Relay: 1.5 amp @ 25 VAC, 60 Hz, 0.6 pf Ignitor: 2.0 amp @ 80VAC, 60 Hz - resistive Humidifier Relay: 1.0 Amp @120 VAC, 60 Hz.Electronic Air Cleaner Relay: 1.0 Amp, @ 120 VAC, 60 Hz Flame Current Requirements:Minimum current to insure flame detection: 1 µA DC*Maximum current for non-detection: 0.1 µA DC*Maximum allowable leakage resistance: 100 M ohms *Measured with a DC microammeter in the flame probe lead OPERATING TEMPERATURE RANGE:-40° to 175°F (-40° to 80°C)HUMIDITY RANGE:5% to 95% relative humidity (non-condensing)Timing Specs: (@ 60 Hz**) maximumFlame Establishing Time: 0.8 sec Flame Failure Response Time: 2.0 secGases Approved: Natural, Manufactured, Mixed, LiquidPetroleum, and LP Gas Air Mixtures are all approved for use.SW1 SWITCH POSITIONS Set switch # SW1-2Off On Off OnTIME SW1-1Set switch #On Off Off On1/2 Min 5 Min 10 Min 15 MinOPTION SWITCH POSITIONS HEAT delay-to-fan-off (SW2):Set switch #1On On Off Off 2Off On On Off60 sec.100 sec.140 sec.180 sec.The dip switch settings for this control may be different from thecontrol being replaced. Please set the switches for the delay period according to the chart above.If W1 and W2 are tied together, the time delay of second stage is based on the switch settings of SW1, per the following table.HEAT MODEIn a typical system, a call for first stage heat is initiated by closing the W1 thermostat contacts. The Humidifier output is energized and the inducer blower is enabled at low speed. The control waits for the stage 1 pressure switch to close. When the pressure switch closes the silicon nitride ignitor is powered. This control has an adaptive algorithm that reduces the ignitor temperature to slightly greater than the minimum temperature required to ignite gas in each particular application. The con-trol measures the line voltage and determines an initial ignitor temperature setting based on the measurement. After each successful ignition, the control lowers the ignitor temperature slightly for the next ignition attempt. The control continues to lower the ignitor temperature until ignition does not occur, and the control goes into retry mode. For the second attempt to ignite gas within the same call for heat, the control increases the ignitor temperature to the value it was on the previous successful ignition. After ignition is successful, the control sets the ignition temperature at this value. The control is constantly making adjustments to the ignitor modulation routine to com-pensate for changes in the line voltage. The control will relearn after power interruptions.The Silicon Nitride ignitor manufactured by White-Rodgers must be used. These ignitors are specially designed to operate with the adaptive ignition routine used by the control to ensure the most efficient ignitor temperature.At the end of the ignitor warm-up time, the first stage of the two-stage manifold gas valve is energized (low fire). Flame must be detected within 5 seconds. If flame is detected, the 45 second delay-to-fan-on period begins. After the delay-to-fan-on period ends, the circulator enable, (pin 15 on the 16-pin connector is the “E” output to the circulator) and air cleaner are energized.A call for second stage heat (W1 and W2) after a call for first stage heat will activate a 30-second 2nd stage delay. Following the 30-second delay, the inducer motor is driven at high speed. The control checks the 2nd stage pressure switch. When the pressure switch closes, the 2nd stage gas valve turns on and the circulator is enabled at high speed (“E” remains energized any time the circulator is on).When the second stage of the thermostat is satisfied, the inducer motor is reduced to low speed, and the 2nd stage gas valve and high circulator speed are de-energized.When the first stage of the thermostat is satisfied, the gas valve is de-energized and the heat delay-to-fan-off timing begins. The inducer will postpurge for an additional 5 seconds. When this time is expired, the inducer and humidifier will de-energize. Upon completion of the heat delay-to-fan-off period, the circulator and air cleaner are de-energized.If flame is not detected during the trial-for-ignition period, the gas valve is de-energized, the ignitor is turned off, and the control goes into the “retry” sequence.The “retry” sequence starts with a 60-second interpurge, en-abling the inducer at low speed for 60 seconds following an unsuccessful ignition attempt (flame not detected). After this wait, the ignition sequence is restarted. If this ignition attempt is unsuccessful, one more retry will be made before the control goes into system lockout.If flame is detected, then lost, the control will repeat the initial ig-nition sequence for a total of ten “recycles”. After ten unsuccessful attempts to sustain flame, the control will go into system lockout.During burner operation, a momentary loss of power of 250 milliseconds or longer will de-energize the main gas valve. When power is restored, the gas valve will remain de-energized and a restart of the ignition sequence will begin immediately.A momentary loss of gas supply, flame blowout, or a shorted or open condition in the flame probe circuit will be sensed within 2 seconds. The gas valve will de-energize and the control will restart the ignition sequence. Recycles will begin and the burner will operate normally if the gas supply returns, or the fault con-dition is corrected, before the last ignition attempt. Otherwise, the control will go into system lockout.If the control has gone into system lockout, it may be possible to reset the control by a momentary power interruption of five seconds or longer. Refer to PRECAUTIONARY, SYSTEM LOCKOUT, AND DIAGNOSTIC FEATURES.COOL MODEIn a typical system, a call for cool is initiated by closing the thermostat contacts. This energizes the compressor, circulator “E” output and air cleaner. After the thermostat is satisfied, the compressor is de-energized and the optional cool mode delay-to-fan-off period begins. After the optional delay-to-fan-off period ends, the circulator “E” output and air cleaner are de-energized.MANUAL FAN ON MODEIf the thermostat fan switch is moved to the ON position, the circulator “E” output and air cleaner are energized. When the fan switch is returned to the AUTO position, the circulator “E” output and air cleaner are de-energized. PRECAUTIONARY, SYSTEM LOCK-OUT, AND DIAGNOSTIC FEATURES PRECAUTIONARY FEATURESThe following precautionary features are built into the control.1. If the high temperature limit or flame rollout sensor openat any time, the gas valve is de-energized.2. During a call for heat cycle, if flame is sensed at any timewhen the gas valve is de-energized, the circulation “E” output and inducer fan are energized at low speed in conjunction with system lockout.3. If the high limit (and/or auxiliary limit) switch(es) open atany time during a call for heat, the circulator blower and inducer fan are energized at low speed.SYSTEM LOCKOUT FEATURESWhen system lockout occurs, the gas valve is de-energized, the circulator “E” output and the inducer blower are energized at low speed. The diagnostic indicator light will flash to indicate system status. (System lockout will never override the precautionary features described above.)To reset the control after system lockout, do one of the following:1. Interrupt the call for heat at the thermostat for at least onesecond and less than twenty seconds (if flame is sensedOPERATION34MOUNTING AND WIRINGINSTALLATIONAll wiring should be installed according to local and national electrical codes and ordinances.The 50V64 control may be mounted on any convenient surface using the four standoffs provided.The control must be secured to an area that will experience a minimum of vibration and remain below the maximum ambient temperature rating of 175°F . T he control is approved for minimum ambient temperatures of -40°F .Any orientation is acceptable.Refer to the wiring diagram and wiring table when connecting the 50V64 control to other components of the system.UL approved, 105°C rated 18 gauge min., stranded,²/64" thick insulation wire is recommended for all low voltage safety circuit connections. Refer to 50V64 control specification sheet for recommended terminals to mate with those on the control.UL approved, 105°C rated 16 gauge min., stranded, 4/64" thick insulation wire is recommended for all line voltage connections. Refer to 50V64 control specification sheet for recommended terminals to mate with those on the control.Following installation or replacement, follow appliance manufacturer’s recommended installation or service instructions to insure proper operation.5 flashes, then pause Flame sense when no flame should be present6 flashes, then pause Line reverse polarity or ignitor circuit error7 flashes, then pause Gas valve circuit error 8 flashes, then pause Weak flame9 flashes, then pauseOpen inducer limit errorThe Green and Red LED's will also flash once for 1 second atpower-up.FAULT CODE RETRIEVAL Two seconds after the power ON, the control shall flash the last four error codes that have occurred over the last 14 days on the red LED. The control will flash the newest error first and the oldest error last with a two-second pause between flash codes. Solid LED error codes will not be displayed. The green ST A TUS LED shall remain ON while the red LED flashes the error codes.The last four fault codes can be erased from memory by pow-ering up with G energized and then toggling W1 three times within eight seconds. W1 must be toggled after the power ON reset for approximately one second each time. The control will acknowledge by turning on the red LED and green ST A TUS LED for two seconds.with the gas valve de-energized, interrupting the call for heat at the thermostat will not reset the control).2. Interrupt the 24 VAC power at the control for at least fiveseconds. Y ou may also need to reset the flame rollout sensor switch.3.After one hour in lockout, the control will automatically reset itself.DIAGNOSTIC FEATURESThe control continuously monitors its own operation and the operation of the system. If a failure occurs, the red LED on thecontrol will flash a failure code. If the Red and Green "status"LED's are on solid, the 5 amp replaceable fuse is bad. If the fuse is good or the Red LED is on by itself, the entire control should be replaced, as the control is not field-repairable.If the sensed failure is in the system (external to the control), the red LED will flash in the following flash-pause sequences to indicate failure status (each flash will last approximately 0.25 seconds, and each pause will last approximately 2 seconds).2 flashes, then pause Retries or recycles exceeded 3 flashes, then pause Inducer or pressure switch error4 flashes, then pause Open limit or rollout switchOPERATION550V64 TERMINALTYPE SYSTEM COMPONENT CONNECTIONLINE Input voltage (120 VAC) HOT SIDE XFMR-H spade terminal*24 VAC transformer line voltage neutral side Input voltage (120 VAC) neutral sidespade terminal*24 VAC CommonLow heat speed select, output to circulator blower 24 VAC CommonDelay tap, output to circulator Cool tap, output to circulator YLO, output to circulatorAdjust tap, output to circulator 24 VAC Common O, output to circulatorHumidistat, output to circulator Heat tap, output to circulator 24 VACW2, output to circluator Y, output to circulator G, output to circulator G reen CFM indicator spade terminal*Circulator blower neutral sideCIR-H CIR-N XFMR-N FPHUM - N EAC - N EAC HUM LINE-N spade terminal*24 VAC transformer line voltage hot side spade terminal*spade terminal*spade terminal*spade terminal*spade terminal*spade terminal*spade terminal*4-pin connector 16-pin connectorTYPICAL SYSTEM WIRING TABLECirculator blower hot sideHumidifier hot sideElectronic Air Cleaner hot side Humidifier neutral sideElectronic Air Cleaner neutral side Flame probe**** maximum recommended flame probe wire length is 36 inches.IND 01 (1)IND 02 (2)IND 03 (3)GRND (4)Inducer 01Inducer 02Inducer 03Inducer ground2-pin connector IGN-H IGN-N Ignitor output Ignitor common * Spade terminals are 0.25" x 0.032"W1W2G R B/C YLO Y BK OMVH (3)MV COM (8)HLI (2)HLO (9)TR (11)MV (4)TH (7)GND (5)PS2 (6)PS0 (1)IL1 (10)PS1 (12)E11-1E11-2E11-3E11-4E11-5E11-6E11-7E11-8E11-9E11-10E11-11E11-12E11-13E11-14E11-15E11-16First stage call for heat Second stage call for heat Input for fan operation24 VAC transformer (HIGH side)24 VAC transformer (LOW side)First stage call for cool Second stage call for cool Humidistat enable H/P or cooling modeGas valve second stage Gas valve ground High limit input High limit output24 VAC transformer (low voltage COMMON side)Gas valve first stage24 VAC transformer (low voltage HIGH side)MUST BE RELIABLY GROUNDED TO CHASSIS 2nd stage pressure switch Pressure switch output Inducer limit input1st stage pressure switch12-pin connector9-screw terminal block120 VACHOT NEUTRAL TYPICAL SYSTEM WIRING DIAGRAM7White-Rodgers is a business of Emerson Electric Co.The Emerson logo is a trademark and service mark of Emerson Electric Co. 。
GM通用缩略语

Acronym Definition DepartmentA Ampere (unit of electrical current)ENGA Frontal Area (a symbol)VTSA/C Air Cleaner.A/C Air Conditioning.PSEO, VTS, GVDP, ENG A/CL Air Cleaner.ENGA/D Analog to Digital PSEO, ENGA/D,D/A Analog-to-Digital, Digital-to-Analog.ENGA/D/V Analysis / Development / Validation GVDP, GMPTA/D/VP&R Analysis/Development/Validation Plan & ReportA/DFL Air Deflector. An abbreviation.ENGA/DM Authoring & Data ManagementA/F Air/Fuel Ratio.PSEO, ENG, GMPTA/H Air over Hydraulic ENGA/Nut Anchor Nut ENGA/P Accounts PayableA/P Air Pump ENGA/R Accounts ReceivableA/R Appropriation Request GMPTA/Rst Armrest ENGA/Rtl Anti-Rattle ENGA/S Auto Sequence.ENGA/Susp Air Suspension ENGA/T Automatic Transmission.PSEO, ENGA/Trns Automatic Transmission ENGA/V Audio/VisualGVDP, ENG, GMU, GMPT A1R Alpha 1 Release. To mark that point in time as which the design,manufacturing, and engineering information for the Alpha 1 vehiclebuild is released.A1VA Alpha 1 Virtual Assessment ENGA2LA American association of Laboratory Accreditation GMPTGVDP, ENG, GMU, GMPT A2R Alpha 2 Release. To mark that point in time as which the design,manufacturing, and engineering information for the Alpha 2 vehiclebuild is released.A2VA Alpha 2 Virtual Assessment ENGA3Automatic Three Speed Transmission (No longer built or used)ENGA4Automatic Four Speed Transmission ENGAA Algorithmic ArchitectureAA Alternate AnalysisAA Aluminum AssociationGVDP, ENG, GMU, GMPT AA Approve Architecture. To mark that point in time at which there is aregular meeting of the Automotive Strategy Board (ASB) wherethe Architecture Contract is brought forward for approval. Thisresults in deliverables that document the Global Corporateapproval of the proposed new architecture (or the significantmodification to an existing architecture), and also givesauthorization (but not funding) to complete the development,implement the architecture at the Bill of Process and Bill ofMaterial level, and approve its use for the identified current and/orfuture Portfolio Plan products.AA Atomic AbsorptionAAA American Automobile Association.ENGAAAAA American Association Against Acronym AbuseAAAD Association of Automotive Aftermarket DistributorsAAC Advanced Audio CompressionAAC Automotive Advertisers Council ENGAACA Antique Automobile Club of AmericaAACA Amphibious Auto Club of AmericaAAD Assembly Aid Devices.ENGAADT Average Annual Daily Travel [number of vehicles on a highwaysegment]AAES American Association of Engineering SocietiesAIAGAALA American Automobile Labeling Act. Requires a label placed on newcars identifying the country of origin of certain major parts of autossuch as engine and transmission, and identifying whose totalcontent in the vehicle is greater than 15%.AAM Alliance of Automobile Manufacturers (replaces AAMA)ENG, GMPTAAM American Axle & ManufacturingAAMA American Automobile Manufacturers Association (disbanded).ENG, GMPTAAMI American Association of Medical Instrumentation ENGAAOL Automotive Aftermarket On LineAAP Appearance Approval Report.AAPA American Association of Port AuthoritiesAAR Appearance Approval Report.ENG, GMPTAARS Affirmative Action Reporting System ENGAASHTO American Association of State Highway and TransportationOfficialsAAT Ambient Air Temperature.PSEOAB Auxiliary Battery ENGABA Agreement to Build Alpha (4ØVDP).ENGABA American Banking Association EAGABA American Bus AssociationFINABAP Advanced Business Application Programming. (Programs writtenin this language are referred to as ABAPs). ABAP/4 is a fourthgeneration programming language developed by SAP to developbusiness applications.ABB Agreement To Build Beta (4ØVDP).ENGABC Acceleration Boundary CurveABC Active Body Control (DC suspension system).GMPTABC Activity Based Costing.ENG, GMPTABCM Activity Based Cost Management.ABE Advanced Body EngineeringABEL Advanced Boolean Expression Language [a Data-I/O Trademark]ABF Abdomen ForceABIOS Advanced BIOS [Basic Input / Output System]ABL Assembly Breakdown List.ENGABM Assistant Brand Manager GMUABMF Assistant Brand Manager - Finance GMUABMM Assistant Brand Manager of Marketing GMUABMP Assistant Brand Manager of Product GMUABNT Associacao Brasileria de Normas Teonicas (Brazil).ENGABP Acquisition Business Process. A GM business which is under FSS(Financial Shared Services ).ABP Advanced Business Processes (part of PC&L)ENGABP Agreement To Build Prototype.ENGABR Available Bit Rate ENGAbs Absorber. An abbreviation.ENGABS Acrylonitrile Butadiene Styrene (a plastic).ENGABS Anti-Block Steering.ENGABS Antilock Brake System.VTS, GVDP, ENG, GMU, GMPT ABS Anti-Skid Braking System.ENGABS Automated Billing System. Owned by EAG Invoicing & AccountsEAG, FIN Receivable.ABTS All Belts To Seat. Used with reference to passenger restraints.ENGAbv Above. An abbreviation ENGENGABWO Administrative Build Work Order. It communicates the quantity,detail option content and desired build completion date of prototypeand development vehicles required for test and validation.AC Acceleration Complete.ENGAC Air Conditioning.GMU, GMPTAC Alternating Current.ENGAC Annual CostAC Auxiliary ControlACB Adaptive Cylinder Balance GMPTAcc Access. An abbreviation.ENGACC ACCumulator (an abbreviation)ENG, GMPTACC Adaptive Cruise Control (radar/laser controlled)ENGACCA Adaptive Cruise Control with AlertAccel Acceleration (an abbreviation)PSEO, ENG Acclrm Accelerometer. (an abbreviation).ENGAcclrtm Acceleration. (an abbreviation).ENGAccum ACCumulator (an abbreviation)PSEO, ENGAccy Accessory (an abbreviation)PSEOGVDP, ENG, GMU ACD Actual Completion Date. Confirmation that the deliverable has beenachieved.ACD Automatic Call DistributionACD Automotive Component DivisionACDS Automatic Change Detection System GMPTACE Accelerated Cost Estimate ENGACE Alliance for Clean EnergyACE Army Corps of EngineersACE Assistant Chief Engineer ENGACEA(European Car Manufacturers Association)ENGACEC American Consulting Engineers CouncilACEEE American Council for an Energy Efficient Economy ENGACF Access Control Facility.ENGACG Administrative Certification Group.ENGENGACG Allied (Automotive) Component Group. No longer used; nowDelphi.ACGW Automotive Components Group, Worldwide ENGACH Air Changes per HourACI Alloy Cast Iron ENGACI American Concrete InstituteACI Applied Ceramics, Inc.ENGACI Automatic Cargo IdentificationACIA Asynchronous Communications Interface Adapter ENGACL Access Control List. Used in Lotus Notes to control access tovarious databases.ACL Advanced CMOS LogicACL Air Cleaner PSEOACM Adjusting Credit Memo EAGACM Association of Computing Machinery.ENGACM Air Conditioning Module.PSEO, ENG ACMT Action Center Management Team.ENGACN Automated Crash Notification (SDM output of a GMLAN messagewhen any air bag is deployed)ACN Automatic Crash NotificationAcnt Accent (an abbreviation).ENGACPI Advanced Configuration and Power Interface (specification)ENG ACRONYM Abbreviated Coded Rendition Of Name Yielding MeaningACRS Air Cushion Restraint System (no longer used, replaced with SIR).ENGFINACRS Accelerated Cost Recovery System. A depreciation method underUS tax law allowing for the accelerated write-off of property undervarious classification. Also see MACRS.ACS Accredited Standards Committee (ANSI)ACS Automatic Clearance SensingACSI American Customer Satisfaction IndexAcsry Accessory (an abbreviation)ENGAct Actual (an abbreviation)PSEOACT Acoustic Change TransportACT Assembly Component Tracking. A detailed list of parts contained inENGan assembly. ACT is available in the Product Description System(PDS).ACTC Air Conditioning Technical CommitteeActr Actuator (an abbreviation)ENGACTS Adaptive Computerized Training SystemACTS Advanced Car Technology SystemsACTS American Coalition for Traffic SafetyACTV Activate PSEOACV Actual Cash ValueACV Air Cushion VehicleAD Accommodated Device.PSEOAD Automatic Disconnect ENGADA Accident Data AnalysisADA Americans with Disabilities ActENGADAMS Automatic Dynamic Analysis of Mechanical Systems (A generalpurpose kinematics / dynamics analysis program used to modelvehicle handling and suspension performance.)Adap Adapter (an abbreviation)ENGAdapt Adaptive (an abbreviation)PSEOAdapts Adapters (an abbreviation)PSEOADC Analog-to-Digital Converter.ENGADD Advanced Development Directories ENGAddt Additive (an abbreviation).ENGADG Accommodated Device Gateway PSEOAdhes Adhesive (an abbreviation).ENGADI Analog Devices, Inc.ADI Area of Dominant Influence ENGAdj Adjust (an abbreviation)PSEO, ENGAdjr Adjuster (an abbreviation).ENGADL Assembly Diagnostic Link ENGADL Automatic Door Lock.PSEO, VTS, ENG ADM Accessory Drive Motor ENGADM Adjusting Debit Memo EAGADN Advanced Digital Network (Usually refers to a 56Kbps leased-line)ADP Advanced Development Process ENGADP Alternative Durability Process ENGADP Automatic Data Processing.ENGADP Advanced Development Process.ADPCM Adaptive Differential Pulse Code ModulationADPCM Adaptive Pulse Code Modulation.ENGADQA Automated Drive Quality AnalysisADR Alternate Dispute Resolution. Part of CARS VSSMADR Australian Design RulesAds Adsorber (an abbreviation). An emission control device which actsENGto take up gases and/or liquids by physical and/or chemical forces,such as with activated charcoal or the like, and releases it at a latertime.ADS Anti Dieseling Solenoid ENGADS Audio Distribution System ENGADS Auxiliary Discriminating Sensor PSEOADS Alternating Simultaneous Double Fire.ENGADSG Automotive Diagnostic Systems GroupADSIM Automotive Display Simulator ENGADSL Asymmetric Digital Subscriber Line (Usage is similar to a leasedENGline.)ADSL Asynchronous Data Subscriber Line [Supports data speeds over 2Mbps downstream (to the user) and slower speeds upstream (tothe Internet).]ADT Average Daily TrafficADTS Advanced Drive Train System ENGADTT Average Daily Truck TrafficAdv Advanced (an abbreviation).ENGADV Analysis, Development and Validation. (Should be written as A/D/V)GVDP, ENG, GMU, GMPTAE Acceleration Enrichment.ENGAE Advanced EngineeringAE Architectural EngineeringAEC Appearance Engineering Committee.AIAGAEC Automotive Electronics Council. The AEC was originally establishedby Chrysler, Delco Electronics, and Ford for the purpose ofestablishing common part-qualification and quality standards.Components meeting these qualification specifications areconsidered suitable for use in the harsh automotive environmentwithout additional component-level testing.AEC Atomic Energy CommissionAEC Automotive Emission Control.ENGAECD Automotive Emission Control Device.ENGAED Automotive Electronics Development.ENGAEEP Automotive Energy Efficiency Program.ENGAEI Automated Equipment IdentificationAERA Automotive Engine Rebuilders AssociationAES Advanced Engineering Staff.ENGAETR Advanced Electronically Tuned Radio.AF Actual Forecast.ENG, GMUAF Air Fuel Ratio. (see A/F at beginning of section).AF Alternative Fuel. See AltFuel.AF Axial FeedAFAIK As Far As I Know.AFC Accessory Function Controller ENGAFC Alkaline Fuel CellAFC Authorization for Check EAG, GMPTAFC Automatic Frequency ControlAFD Abrasive Flow Deburring.ENGAFD Architecture Flow Diagram.ENGAFECM Alternative Fuel Engine Control Module.PSEOAFIM Air-Fuel Imbalance Monitor.SO, GMPTAFL American Federation of Labor.ENGAFL-CIO American Federation of Labor and Congress of IndustrialOrganizationsAFM Air Flow Meter GMPTAFO Alternative Fuel Operation.PSEOAFR Air Fuel Ratio GMPTAFS Adaptive Frontlighting SystemAFS American Foundrymen’s SocietyAFSM Area Financial Services Manager. GMAC Market Area TeamMember, responsible for financial growth at the dealership throughGMAC.Aft After (an abbreviation)PSEOAFV Alternative Fuel Vehicle.ENGAg Silver (Argentium)AGA American Gas Association ENGAGC Automatic Gain Control ENGAGM Absorbent Glass Mat. Next generation of battery technology.ENGAGND Analog GrouND.ENGENGAGP Accelerated Graphics Port (circa 1997. A dedicated graphics portwhich allows higher throughput from the graphics card to theprocessor for speedier 3D graphics.)AGV Automatic Guided Vehicle ENGAGVS Automatic Guided Vehicle System ENGAh Ampere – Hours ENGAHAR Automatic Highway Advisory RadioAHDL Analog Hardware Descriptive LanguageAHESI Auburn Hills ESI (database)AHIPC Auburn Hills Information Processing Center ENGAHL Automatic HeadlampsAHLD Automatic Headlamp Leveling DeviceAHP Analytical Hierarchy Process ENGAHRS Adjustable Head Restraint SystemAHRS Amp-Hours (an abbreviation)PSEOAHS Automated Highway SystemsAHS Average Highway SpeedAI Air Inlet.ENGAI Artificial Intelligence.GVDP, ENG, GMUAIAGAI Automatic Identification - those technologies that provide methodsfor machine-readable data. The most popular AI medium is BarCoding.AIA American Institute of ArchitectsAIA Automobile Importers of America, Inc.ENGAIAG Automotive Industry Action Group. Automotive Industry ActionAIAG, GVDP, ENG, GMU, GMPT Group - A trade association working to increase memberproductivity through a cooperative effort of North American vehiclemanufacturers and their suppliers.AIAG, ENGAIAM Association of International Automobile Manufacturers. Theassociation of carmakers with operations in the U.S. and Canada.Membership is not restricted to U.S.-based companies. (seeAAMA)AIB ASI Input BufferAIC Automotive Information Council.ENGAICC Auxiliary Information & Control Center ENGAID Architecture Interconnect Diagram.ENGAIEG Automotive & Industrial Electronics Group (Div. Of Motorola)AIIM Association for Information & Image ManagementAIM Analog Input Module.ENGAIM Automatic Identification ManufacturersAIM Automatic Identification Manufacturers Association - Association ofAIAGcompanies that manufacture products for automatic identification,such as bar code readers, scanners, etc.AIMI American Isuzu Motors Inc.AIN Advanced Intelligent NetworkAIN Analog INput.ENGAIP ASI Input PackageAIPE American Institute (of) Plant EngineersAIR Air Injection Reactor (or Reaction).ENG, GMPTAIR Secondary Air Injection.PSEOAIS Abbreviated Injury ScaleAIS Architecture Interconnect Specification ENGAISI American Iron and Steel InstituteAITC Aerodynamics Integration Technical CommitteeAITPM American Institute of Total Productive MaintenanceAIW ASI Input WorkshopAKS Aluminum Killed Steel (The term "killed" is used because aluminumadditions cause the steel to lie quietly in the mold duringsolidification.)Al Aluminum (an abbreviation).ENGAL2All Seasons touring. A tire specification.ENGAL3All Seasons performance. A tire specification.ENGALAPCO Association of Local Air Pollution Control OfficesGVDP, ENG, GMU, GMPT ALBS Assembly Line Balance System. Computer system that helpsestablish and track assembly plant direct labor work assignments.ALC Automatic Lamp Control.PSEOALC Automatic Level Control.PSEO, ENGALCL Assembly Line Communication Link.ENGALDL Assembly Line Data Link GMPTALDL Assembly Line Diagnostic Link.PSEO, ENGALDM Attachment Level Design Method.FINALE Application Link Enabling. ALE facilitates the coupling of businessapplications which are distributed on different databases andprovides the functionality to distribute and receive data.ALG Automotive Lease Guide GMUALGOL Algebraic Oriented Language ENGALGOL ALGOrithmic Language.ENGAlgorithm A specific rule used to determine red/green status of a RigorousTracking and Throughput Management (RT&TM) measure.ALI Automotive Lift Institute.ENGALM Automatic Level Module.PSEOALN Actuator Line Nozzle ENGALR Alpha Level Release.GVDP, ENG, GMU, GMPT ALR Automatic Locking RetractorALRR Appropriation Line Revision RequestALS All Seasons (an abbreviation). A tire specification.ENGAlt Alternative (an abbreviation)PSEOAlt Altitude (an abbreviation).ENGAltFuel Alternative Fueled Vehicles. Vehicles that operated on fuels otherthan gasoline or diesel./eng/alto/ ALTO Accelerated Learning of Test Operations (New employees enteringspecific departments within Design Confirmation and Analysis willbegin an ALTO job simulation with the support of an assignedguide.)ALU Arithmetic & Logical Units.ENGAM Account Manager ENGAM Amplitude Modulation (an abbreviation). i.e. AM Radio.PSEO, VTS, ENGAMA American Marketing AssociationAMA American Medical AssociationAMA Area Module AdvisorAmb Ambient (an abbreviation).ENGAMC Air Management Control ENGAMD Accessory Motor Drive ENGAMDSG Automotive Manufacturers’ Dealer Systems GroupAME Advanced Manufacturing Engineering ENGAMECS Austerity Mode Emission Control System ENGAMEX American Express ENGAMFA Alternative Motor Fuel ActAMIC Automotive Multimedia Interface Collaboration (An organization,formed by a legal agreement between 5 automotive companies,with the mission of defining the auto industry’s first set of hardwareand software interface standards for automotive information,communications and entertainment systems.)AML Adaptive Modeling LanguageAmm Ammeter (an abbreviation). A diagnostic instrument used forENGmeasuring electric current in amperes.Amp Ampere (an abbreviation).Amp Amplifier (an abbreviation)PSEOAmpf Amplifier (an abbreviation)ENGAMPO Association of Metropolitan Planning OrganizationsAmps Amperages (an abbreviation)PSEOAMPS Advanced Mobile Phone Service ENGAMPS Automated Material Procurement and Scheduling ENGAMPTS Allied Productive Material Transfer SystemAMR Anisotropic Magneto ResistanceAMRC Automotive Market Research Council.ENGAMS American Mathematical SocietyAMS Attendance Management System.ENGAMSL Above Mean Sea Level.ENGAmt Armature (an abbreviation).ENGAMT Analysis as Marketing Tool.AMuS Auto Motor und Sport (a German automotive magazine)AN Application Notes.ENGAnc Anchor (an abbreviation).ENGANC Active Noise Cancellation.ENGANDS Alpha-Numeric Display SystemANFIA Association Nationale Fra Industrie Automobilistich.VTSAutomobilistiche (National Association among AutomobileIndustries). Italian equivalent of Motor Vehicle ManufacturersAssociation.ANL Argonne National Laboratories ENG, GMPTANMC American National Metric Council.ENGANOVA ANalysis Of VAriance.ENG, GMPTANPRM Advance Notice of Proposed Rule Making.ENGANS American National Standard ENGANSI American National Standards Institute. The standards bodyAIAG, ENG, GMU, GMPT responsible for formalizing the U.S. voluntary standardsdevelopment process. ANSI is the U.S. representative to non-treatyinternational standards bodies such as ISO, IEC, and EDIFACT.Founded in 1918, ANSI ensures that a single set of non-conflictingstandards are developed for an area.ANSI/ASQ Q90 See ISO-9000.AIAGANT Antenna. An abbreviation.ENGANT Assemblies Navigation ToolAIAG, ENG, GMPT, AVDC ANX Automotive Network eXchange. A project administered by theAIAG to assure efficient and secure electronic communicationamong subscribers, so that an ANX subscriber company in theautomotive industry would require only a single access circuit tocommunicate with any other ANX subscriber. ANX is composed ofa TCP/IP network that includes trading partner subscribers, certified(Internet) service providers, and network exchange points.AOA Analysis Of AlternativesAOB Any Other Business.ENGAOIB Adjustable Off Idle Bleed (Carburetor).ENGAOL America On Line.AOQL Average Outgoing Quality Limit.ENGAORC Automotive Occupant Restraints CouncilAORS Advanced Occupant Restraint SystemAOS Automatic Occupant Suppression / Automatic Occupation detectingSensor.AOT Automotive Organization Team ENGAP Accounts Payable ENG, GMU, EAGAP Achievement Plan ENGAP Advanced Purchasing.GVDP, ENG, GMU, GMPTAIAGAP Application Protocol. An ISO standard, contained within ISO 10303(STEP), which specifies the STEP product data construct requiredfor the communication of information in a defined applicationcontext.AP Asian Pacific GVDP, ENG, GMUAP&P Accounting Practices & Procedures ENG, FINAP/S Achievement Plan / Scheduler ENGAPA Acquisition Process Analyst.ENGAPA Authorized Payment Approval EAGAPAA Automotive Parts and Accessories Association, Inc.ENGAPAC Auto Parts Advisory Commission ENGAPB Automatic Powertrain Braking GMPTAPC Automated Passenger CountingAPC Acquisition and Production Costs. Pertains to fixed assets.FINAPD Alliance Planning Director.ENG, GMU, GMPTAPD Assembly Plant Designator (used in PDS).APD Assembly Process Deviation.ENGAPD Avalanche Photo Diode ENGAPE Annual Program Execution.GVDPAPE Advanced Product Engineering (no longer used)ENGAPEAL Auto Performance Execution and Layout (J. D. Power)ENGAPEC Asian Pacific Economic Corporation ENGAPET Advanced Program Execution Team.GVDPAPEX Advanced Portfolio Exploration GVDP, ENGAPEX Advanced Product Exploration GVDP, GMUAPG Advanced Process Group GMPTAPI Advanced Product Information.GVDP, ENGAPI Advanced Programmable Interrupt control ENGAPI American Petroleum Institute.ENGAPI Annual Physical Inventory.FIN, ENG, GMU, GMPTAPI Application Programming Interface. A set of functions and/orENG, GMU, FINintegration points that system developers can use to enablecommunication between processes and/or applications. APIs allowfor interoperability and integration of systems by providing vendor-or product-independent communication between the systems,provided the systems share the same software and/or hardwareplatform.APIC Advanced Programmable Interface ControlAIAG, ENG, GMPTAPICS American Production & Inventory Control Society. A professionalsociety devoted to the improvement and advancement of inventoryand control management.APL Associative Programming Language.ENGAPLQ Applique. An abbreviation.ENGAPM Accelerator Pedal Module.ENGAPM Accessory Power Module (With a PIM, makes up PEB)ENGAPM Application Processor ModuleAPM Area Parts Manager VSSMAPM Automotive Process Model GVDP, ENG, GMU, AVDCAPM Area Parts Manager (Dealership contact/sales person for GMParts)APMES Advanced Product & Manufacturing Engineering Staff ENGAPMM Assembly Plant Material Management ENGAPMT Allied Productive Material Transfer FIN, EAGAPMTS Allied Productive Material Transfer System.ENG, GMPTAPO Asian Pacific Operations ENGAPP Accelerator Pedal Position PSEOAPP Applied Practices & Procedures ENGAPPL Application. An abbreviation.ENGMFD, GMPT, GVDP, ENG, GMU APQP Advanced Product Quality Planning. APQP is required for everypart coming from suppliers.Apr April (an abbreviation)PSEO, ENGAPR Annual Percentage Rate ENG, GMUAPR Appropriation Request Process.APR Automatic Password RequestAPR Automatic Password Reset.ENGAPRA Automotive Parts Rebuilders Association, Inc.ENGAPS Advanced Photo SystemAPS American Physical SocietyAPS American Psychological SocietyAPS Asynchronous Protocol SpecificationAPS Automated Patent SystemAPS Auxiliary Power Supply ENGAPSC Advanced Product Service Committee ENGAPSMB Accessory Power Supply Mother Board ENGAPT Adjustable Part Throttle ENGAPT Alliance Planning Team ENGAPT Automatic Programmed Tool ENGAPTA American Public Transit AssociationAIAG, ENGAPTA American Public Transport (or Transit) Authority. Group formed toset and represent industry requirements for public transit systems inNorth America.AIAGAPTA Automotive Products Trade Agreement. That portion of theU.S./Canadian Free Trade Agreement that referred to automotiveparts.APU Auxiliary Power Unit ENGAPV All Purpose Vehicle ENG, GMPTAPY Annual Percentage Yield.GMUAQ Air Quality.ENGAQC Air Quality Committee ENGAQL Acceptable Quality Level ENGAQMD Air Quality Management District.GMUAQNS Accelerated Quality Network Strategies GMPTAr ArgonAR Academic Relations HRAR Accounts Receivable.ENG, GMU, EAGAR Anti-Reflection.ENGAR Appropriation Request.GVDP, ENG, GMUAR As Required.ENGARA Automotive Recyclers AssociationARAN Automated Road AnalyzerARB Anti- Rollover BreakingARC Advanced Radio Concept.ENGARC Atlantic Research Corporation (air bag inflators: Knoxville, TN)ARC Awareness, Recognition, and CommunicationGVDP, ENG, GMU, GMPT ARC Architecture Requirements Complete. To mark that point in time atwhich the requirements for the architecture have been completelydefined.ARD Acceptance Requirements Document ENGARD Application Requirements Document (IT)ARG Asset Recovery GroupARI Automatic Road Information.ENGARM Application Resource ModelARM Automated Requirement Measurement (NASA software tool toassess requirements written in "natural language." The tool isaimed at "writing the requirements right." It does not address"writing the right requirements.")ARMS Account Reconciliation Monitoring System EAGARO After Receipt of OrderARP Appropriations Request Process GVDP, ENG, GMUARP Association of Retired Persons.GMUAIAGARPA Advanced Research Projects Agency.A government agency, whichhas been assigned to manage Defense Technology Conversion,Reinvestment, and Transition Assistance. One of the projects theagency is involved in is the Technology Reinvestment Project (SeeTRP).ARR Architectural Requirements Review.GVDP, ENG, GMU ARRANT Advanced Research Projects Agency Network ENGARS Adaptive Receptive System PSEOARS Angular Rate SensorARTBA American Road & Transportation Builders Association.ENGENGARTEMIS A computer system used to calculate overall program timing andgenerate Gantt charts, critical path diagrams, and timing plots.ARTS Adaptive Restraint Technology SystemAs ArsenicAS Active Suspension.ENGAS Administrative Services.ENGAS Allied Signal Inc.ENGAS American Standards association.ENGAS As Specified.ENGAS Assembly System.ENGASA Agreement to Ship Alpha.GVDP, ENG, GMUASAM Association for Standardization of Automation and MeasuringGMPTSystemsASAP As Soon As Possible.ENGASB Agreement to Ship Beta.GVDP, ENG, GMUASB Automotive Strategy Board.GVDP, GMUASBC American Seat Belt Council.ENGASBE American Society of Body Engineers.ENGASC Accredited Standards Council. An ANSI committee that developsAIAG, GMPTstandards.ASC Anti-Slip Control GMPTASC Architecture Selection Complete. To mark the point in time at whichGVDP, ENG, GMU, GMPT the architecture decisions have been completed and a singlearchitecture has been chosen.AIAGASC MH10Accredited Standards Committee MH10 - The ANSI committee forstandards for Unit Loads and Transport Packages, including thenational standard for bar code labeling.AIAGASC X12Accredited Standards Committee X12 - The ANSI committee forUS EDI standards, commonly called "ANSI X12."ASC X3Accredited Standards Committee X3 - The ANSI committee forAIAGInformation Processing.ENGASCII American Standard Code for Information Interchange (Mostcommonly refers to a plain-text file.)ASD Actual Start Date. Refers to date the design was started by aENGspecific stage/Dept.ASD Advanced Serviceability of Design.SOASD Anti Slide DeviceASDF Alternating Simultaneous Double FireASDM Automotive Steel Design Manual (CARS Section: ASDM is aCARS on-line reference that gives access to 700 pages of text,charts, equations, tables, and figures concerning the use of steel invarious automotive designs. Hypertext links and search featuresassist in readily locating needed information.)ASE Automotive Safety Engineering.ENGASE Automotive Service Excellence.VTS, VSSMASEP Automotive Service Education Program VSSMASG Administrative Support GroupASI Architecture Studies Initiation. To mark that point in time at whichGVDP, ENG, GMU, GMPT the vehicle architecture study and limited program activities begin.ASIA Automotive Service Industry Association.ENGASIAN Association of South Eastern Asian Nations ENGASIC Application Specific Integrated Circuit.ENGASK Amplitude Shift Keying ENGASLE American Society of Lubrication Engineers.ENGAsm Assembly. (abbreviation)PSEO, GMPT, ENG, GVDP ASM Alarm Siren Module.PSEOVSSMASM Area Sales Manager. Dealership contact for sales/vehiclepromotions.ASM Area Service Manager. (No longer used by VSSM; refer to AVM).ASME American Society of Mechanical Engineers.ENG。
基于NVMe_的超高速多通道遥感相机模拟源设备研制

第 21 卷 第 9 期2023 年 9 月太赫兹科学与电子信息学报Journal of Terahertz Science and Electronic Information TechnologyVol.21,No.9Sept.,2023基于NVMe的超高速多通道遥感相机模拟源设备研制张亮,何品权,张青林,夏巧桥*(华中师范大学物理科学与技术学院,湖北武汉430079)摘要:针对当前遥感卫星电荷耦合器件(CCD)相机幅宽越来越大,速率越来越高,现有相机模拟源设备数据输出带宽不足的问题,提出并实现了一种基于非易失性存储器Express(NVMe)的超高速多通道遥感相机模拟源设备。
该设备利用现场可编程逻辑门阵列(FPGA)实现4组NVMeSSD主机控制器,完成对固态硬盘(SSD)的读写操作;同时利用DMA控制器读取DDR4中缓存数据,数据经封装处理后通过光纤接口输出。
实验结果表明:NVMe主机控制器的写平均速率可以达到1.7 GBps,读平均速率达到3.2 GBps。
模拟源系统整体存储容量8 TB,对外输出带宽高达80 Gbps,支持8路光纤接口输出。
该模拟源具有较强的稳定性及良好的可扩展性,已成功应用在某遥感卫星CCD相机模拟源系统中,为数传等设备的测试以及调试提供了充分保障。
关键词:模拟源;非易失性存储器Express;现场可编程逻辑门阵列;CCD相机;光纤中图分类号:TP73 文献标志码:A doi:10.11805/TKYDA2021231Development of an ultrahigh-speed multi-channel remote sensing camerasimulator based on NVMeZHANG Liang,HE Pinquan,ZHANG Qinglin,XIA Qiaoqiao*(School of Physical Science and Technology,Central China Normal University,Wuhan Hubei 430079,China)AbstractAbstract::Aiming at the problem that the current remote sensing satellite Charge Couple Device (CCD) camera has an increasing width and speed, and the output bandwidth of existing camera simulatoris insufficient, an Non-Volatile Memory express(NVMe) based ultrahigh-speed multi-channel remotesensing camera simulator is proposed and implemented. This simulator employs a Field ProgrammableGate Array(FPGA) to implement four groups of NVMe SSD host controllers and complete the read andwrite operations on the Solid State Drive(SSD). The Direct Memory Access(DMA) controller is utilized toread the cache data in DDR4, and the data is output through the optical fiber interface after beingencapsulated. Experimental results show that the average write rate of the NVMe host controller canreach 1.7 GBps, and the average read rate can reach 3.2 GBps. The overall storage capacity of thesimulator is 8 TB, the external output bandwidth is up to 80 Gbps, and it supports eight-way optical fiberinterface outputs. This simulator with strong stability and good scalability, has been successfully appliedin a remote sensing satellite CCD camera simulator system, which provides sufficient guarantee for thetesting and debugging of device such as data transmission.KeywordsKeywords::simulator;Non-Volatile Memory express;Field Programmable Gate Array;CCD camera;optical fiber作为卫星综合电子分系统的重要组成部分,遥感卫星CCD相机完成遥感图像的拍摄,并将图像输出到系统后级数传、压缩等设备进行相关处理操作。
纹理物体缺陷的视觉检测算法研究--优秀毕业论文

摘 要
在竞争激烈的工业自动化生产过程中,机器视觉对产品质量的把关起着举足 轻重的作用,机器视觉在缺陷检测技术方面的应用也逐渐普遍起来。与常规的检 测技术相比,自动化的视觉检测系统更加经济、快捷、高效与 安全。纹理物体在 工业生产中广泛存在,像用于半导体装配和封装底板和发光二极管,现代 化电子 系统中的印制电路板,以及纺织行业中的布匹和织物等都可认为是含有纹理特征 的物体。本论文主要致力于纹理物体的缺陷检测技术研究,为纹理物体的自动化 检测提供高效而可靠的检测算法。 纹理是描述图像内容的重要特征,纹理分析也已经被成功的应用与纹理分割 和纹理分类当中。本研究提出了一种基于纹理分析技术和参考比较方式的缺陷检 测算法。这种算法能容忍物体变形引起的图像配准误差,对纹理的影响也具有鲁 棒性。本算法旨在为检测出的缺陷区域提供丰富而重要的物理意义,如缺陷区域 的大小、形状、亮度对比度及空间分布等。同时,在参考图像可行的情况下,本 算法可用于同质纹理物体和非同质纹理物体的检测,对非纹理物体 的检测也可取 得不错的效果。 在整个检测过程中,我们采用了可调控金字塔的纹理分析和重构技术。与传 统的小波纹理分析技术不同,我们在小波域中加入处理物体变形和纹理影响的容 忍度控制算法,来实现容忍物体变形和对纹理影响鲁棒的目的。最后可调控金字 塔的重构保证了缺陷区域物理意义恢复的准确性。实验阶段,我们检测了一系列 具有实际应用价值的图像。实验结果表明 本文提出的纹理物体缺陷检测算法具有 高效性和易于实现性。 关键字: 缺陷检测;纹理;物体变形;可调控金字塔;重构
Keywords: defect detection, texture, object distortion, steerable pyramid, reconstruction
II
FIDIC专用术语中英文对照及关键时间点1

1.词汇及名词解释In duplicate一式二份Base date基准日Agree or determine商定或确定The lump sum contract price 以合同价格Advance payment预付款Interest-free loan无息贷款Amortization rate分期摊还比率Interim payments期中付款Schedule of payments付款价格表Instalments分期付款Rectification or replacement 修正或更换Compounded monthly复利Statement at completion施工报表Written discharge结清证明Deliberate default有意违约Reckless misconduct轻率的不当行为Fixed rates of exchange 固定汇率Gratuity赏金Commission回扣Balance余额Reasonably practicable 合理可能情况Indemnities保障Outstanding work扫尾工作Policy保单Copies of the policies 保险单副本Premium保险费The insuring party应投保方Full reinstatement全部复原费用Full force and effect 全面实施和有效Typhoon台风Multiple periods累计Contract agreement合同协议书Tender投标书Performance guarantees履约保证Subcontractor分包商Dab争端裁决委员会Fidic菲迪克(指国际咨询工程师联合会) Base date基准日期(指递交投标书截止前28 天的日期)Commencement date开工日期Tests on completion竣工试验Taking-over certificate接收证书“defects notification period缺陷通知期限Performance certificate履约证书Final statement最终报表Provisional sum暂列金额Retention money保留金Statement报表Goods货物Permanent works永久工程Plant 生产设备“section分项工程Works工程Performance security履约担保Site现场Variation变更Mail or courier邮寄或信差Approval, certificates, consents and determinations批准、证明、同意和确定Assign转让Confidential秘密Royalty-free免版税Consortium联合体Interim payments期中付款Delegated受托Adequacy, stability and safety完备性、稳定性和安全性Nominated subcontractor指定的分包商Foreseeable预见Setting out放线Sufficiency of the contract price合同价格Nuisance妨害Surface discharges and effluent地面排水及排污Apparatus仪器Visual inspection目视检查Outstanding扫尾Erection安装Trial operation试运行Commissioning投产准备Wreckage残物Fossils化石Review period审核期Rectified修正As-built documents竣工文件Operation and maintenance manuals 操作和维修手册Dismantle拆卸Rates of wages工资标准Recognized good practice公认的良好惯例,Examine, inspect, measure权检查、检验、测量Rejection拒收Extension of time for completion竣工时间延长Expedite progress加快进度Delay damages误期损害赔偿费Deterioration变质Loss or damage损失或损害Outstanding work扫尾工作Remedying defects修补缺陷Performance certificate履约证书Quotations报价单Invoices, vouchers发票、凭证Duplicate一式二份The outstanding balance of the retention money保留金未付的余额Addendum附录, 补遗Undersign文件末尾签名Insert插入, 填写In conformity with 依照Bind具有约束力Ascertain查明In the capacity of 以…的资格Affix签署Prescribe规定Construe解释In witness作为证人, 证据Assignee受让人, 受托人Specification (技术)规范Pursuant to按照Allocable可分摊的Aggregate总数As appropriate视情况而定Appliance 用具, 器具Remedy补救Legal successor合法继承人Tender投标, 标书Letter of acceptance 受标通知书Tariff关税Multilateral多变的Treaty条约Enter into force生效Subscribe to签名Apply its rules采用它的规定Oversee监督Preoccupy关注Mutual共同的Embody包括, 体现Liberalize使…自由化Cope with应付Implement贯彻, 实施Perplexing复杂的Proliferate激增Impose强加Facet方面Interdependence 相互依存Displacement排水量Hatch船舱盖Hull船体Break-buck ship 散货船Hull carriage托运架Decker甲板层Strongback强基地Conveyor输送设备Roll on/off滚装船Knot节(海里/小时)Congestion拥塞Prohibitive 禁止性的Exorbitant过渡的Stilling basin 静水池Waterfront滨水区Congest拥挤Ecology生态学Choke塞满Tideland潮间区Preclude预防, 排除Dilute稀释Attach系缚Spring倒缆Hinder阻止Lay绞Galvanize镀锌Nominal标称的, 额定的Cushioning缓冲Filament细丝Breasting dolphin 靠船墩Berthing maneuver 靠船Quay实体顺岸式码头Mooring系泊Warehouse仓库Mole堤道码头Tie停泊Lighter驳船Moorage系泊处Berth泊位Trestle栈桥, 高架Fender护舷Contrivance护舷Breakwater防波堤Scour淘刷Asphalt沥青Crib 木笼Caliber质量Rubble抛石Cyclopean毛石Header丁头石Pile sheet板桩Shaft竖井Dowel销钉Rubble mound 抛石机床Trench沟,地壕Loaded draft满载吃水Dead weight载重吨位Turning basin回转水域Freighter杂货船Tug拖轮Capital资本Throughput中转量Navigational aids航运设施Remote sensing遥感Significant wave height有效波高Progressive wave推进波Wave crest波顶Wave trough波底Flood-tide涨潮Ebb-tide落潮Tidal range潮差In situ就地Wharf透空顺岸式码头Self-propelled hopper dredge 自航装舱耙吸式挖泥船Trial and error反复试验Grapple dredge抓斗式挖泥船Chain bucker dredge链式挖泥船Hydraulic dredge吸扬式挖泥船Cutterhead pipeline dredge 绞吸式挖泥船Spoil disposal aera 抛泥区Dipper dredge铲斗式挖泥船Pier突码头Gauging station 水文站Duly正式的Fluvial dynamics 河流动力学Silt up淤积Revetment work 护岸工程Bankfull stage漫滩水位Terminal velocity 沉降速度At best至多Cofferdam围堰Screen格栅Embankment填土堤坝, 路基Tendon钢筋束Post-tensioned 后张法Abutment支座Crack裂缝Anchorage 锚固Pre-tensioned 先张的Viscosity 粘滞性, 粘度Floodplain 滩涂Chlorine 氯2.关键时间点7天1.Progress Reports shall be submitted monthly thereafter, each within 7 days afterthe last day of the period to which it relates.以后应每月报告一次,在每次报告期最后一天后7 日内报出。
Discriminatively Trained Sparse Code Gradients for Contour Detection
Discriminatively Trained Sparse Code Gradientsfor Contour DetectionXiaofeng Ren and Liefeng BoIntel Science and Technology Center for Pervasive Computing,Intel LabsSeattle,W A98195,USA{xiaofeng.ren,liefeng.bo}@AbstractFinding contours in natural images is a fundamental problem that serves as thebasis of many tasks such as image segmentation and object recognition.At thecore of contour detection technologies are a set of hand-designed gradient fea-tures,used by most approaches including the state-of-the-art Global Pb(gPb)operator.In this work,we show that contour detection accuracy can be signif-icantly improved by computing Sparse Code Gradients(SCG),which measurecontrast using patch representations automatically learned through sparse coding.We use K-SVD for dictionary learning and Orthogonal Matching Pursuit for com-puting sparse codes on oriented local neighborhoods,and apply multi-scale pool-ing and power transforms before classifying them with linear SVMs.By extract-ing rich representations from pixels and avoiding collapsing them prematurely,Sparse Code Gradients effectively learn how to measure local contrasts andfindcontours.We improve the F-measure metric on the BSDS500benchmark to0.74(up from0.71of gPb contours).Moreover,our learning approach can easily adaptto novel sensor data such as Kinect-style RGB-D cameras:Sparse Code Gradi-ents on depth maps and surface normals lead to promising contour detection usingdepth and depth+color,as verified on the NYU Depth Dataset.1IntroductionContour detection is a fundamental problem in vision.Accuratelyfinding both object boundaries and interior contours has far reaching implications for many vision tasks including segmentation,recog-nition and scene understanding.High-quality image segmentation has increasingly been relying on contour analysis,such as in the widely used system of Global Pb[2].Contours and segmentations have also seen extensive uses in shape matching and object recognition[8,9].Accuratelyfinding contours in natural images is a challenging problem and has been extensively studied.With the availability of datasets with human-marked groundtruth contours,a variety of approaches have been proposed and evaluated(see a summary in[2]),such as learning to clas-sify[17,20,16],contour grouping[23,31,12],multi-scale features[21,2],and hierarchical region analysis[2].Most of these approaches have one thing in common[17,23,31,21,12,2]:they are built on top of a set of gradient features[17]measuring local contrast of oriented discs,using chi-square distances of histograms of color and textons.Despite various efforts to use generic image features[5]or learn them[16],these hand-designed gradients are still widely used after a decade and support top-ranking algorithms on the Berkeley benchmarks[2].In this work,we demonstrate that contour detection can be vastly improved by replacing the hand-designed Pb gradients of[17]with rich representations that are automatically learned from data. We use sparse coding,in particularly Orthogonal Matching Pursuit[18]and K-SVD[1],to learn such representations on patches.Instead of a direct classification of patches[16],the sparse codes on the pixels are pooled over multi-scale half-discs for each orientation,in the spirit of the Pbimage patch: gray, abdepth patch (optional):depth, surface normal…local sparse coding multi-scale pooling oriented gradients power transformslinear SVM+ - …per-pixelsparse codes SVMSVMSVM … SVM RGB-(D) contoursFigure 1:We combine sparse coding and oriented gradients for contour analysis on color as well as depth images.Sparse coding automatically learns a rich representation of patches from data.With multi-scale pooling,oriented gradients efficiently capture local contrast and lead to much more accurate contour detection than those using hand-designed features including Global Pb (gPb)[2].gradients,before being classified with a linear SVM.The SVM outputs are then smoothed and non-max suppressed over orientations,as commonly done,to produce the final contours (see Fig.1).Our sparse code gradients (SCG)are much more effective in capturing local contour contrast than existing features.By only changing local features and keeping the smoothing and globalization parts fixed,we improve the F-measure on the BSDS500benchmark to 0.74(up from 0.71of gPb),a sub-stantial step toward human-level accuracy (see the precision-recall curves in Fig.4).Large improve-ments in accuracy are also observed on other datasets including MSRC2and PASCAL2008.More-over,our approach is built on unsupervised feature learning and can directly apply to novel sensor data such as RGB-D images from Kinect-style depth ing the NYU Depth dataset [27],we verify that our SCG approach combines the strengths of color and depth contour detection and outperforms an adaptation of gPb to RGB-D by a large margin.2Related WorkContour detection has a long history in computer vision as a fundamental building block.Modern approaches to contour detection are evaluated on datasets of natural images against human-marked groundtruth.The Pb work of Martin et.al.[17]combined a set of gradient features,using bright-ness,color and textons,to outperform the Canny edge detector on the Berkeley Benchmark (BSDS).Multi-scale versions of Pb were developed and found beneficial [21,2].Building on top of the Pb gradients,many approaches studied the globalization aspects,i.e.moving beyond local classifica-tion and enforcing consistency and continuity of contours.Ren et.al.developed CRF models on superpixels to learn junction types [23].Zhu ed circular embedding to enforce orderings of edgels [31].The gPb work of Arbelaez puted gradients on eigenvectors of the affinity graph and combined them with local cues [2].In addition to Pb gradients,Dollar et.al.[5]learned boosted trees on generic features such as gradients and Haar wavelets,Kokkinos used SIFT features on edgels [12],and Prasad et.al.[20]used raw pixels in class-specific settings.One closely related work was the discriminative sparse models of Mairal et al [16],which used K-SVD to represent multi-scale patches and had moderate success on the BSDS.A major difference of our work is the use of oriented gradients:comparing to directly classifying a patch,measuring contrast between oriented half-discs is a much easier problem and can be effectively learned.Sparse coding represents a signal by reconstructing it using a small set of basis functions.It has seen wide uses in vision,for example for faces [28]and recognition [29].Similar to deep network approaches [11,14],recent works tried to avoid feature engineering and employed sparse coding of image patches to learn features from “scratch”,for texture analysis [15]and object recognition [30,3].In particular,Orthogonal Matching Pursuit [18]is a greedy algorithm that incrementally finds sparse codes,and K-SVD is also efficient and popular for dictionary learning.Closely related to our work but on the different problem of recognition,Bo ed matching pursuit and K-SVD to learn features in a coding hierarchy [3]and are extending their approach to RGB-D data [4].Thanks to the mass production of Kinect,active RGB-D cameras became affordable and were quickly adopted in vision research and applications.The Kinect pose estimation of Shotton et. ed random forests to learn from a huge amount of data[25].Henry ed RGB-D cam-eras to scan large environments into3D models[10].RGB-D data were also studied in the context of object recognition[13]and scene labeling[27,22].In-depth studies of contour and segmentation problems for depth data are much in need given the fast growing interests in RGB-D perception.3Contour Detection using Sparse Code GradientsWe start by examining the processing pipeline of Global Pb(gPb)[2],a highly influential and widely used system for contour detection.The gPb contour detection has two stages:local contrast estimation at multiple scales,and globalization of the local cues using spectral grouping.The core of the approach lies within its use of local cues in oriented gradients.Originally developed in [17],this set of features use relatively simple pixel representations(histograms of brightness,color and textons)and similarity functions(chi-square distance,manually chosen),comparing to recent advances in using rich representations for high-level recognition(e.g.[11,29,30,3]).We set out to show that both the pixel representation and the aggregation of pixel information in local neighborhoods can be much improved and,to a large extent,learned from and adapted to input data. For pixel representation,in Section3.1we show how to use Orthogonal Matching Pursuit[18]and K-SVD[1],efficient sparse coding and dictionary learning algorithms that readily apply to low-level vision,to extract sparse codes at every pixel.This sparse coding approach can be viewed similar in spirit to the use offilterbanks but avoids manual choices and thus directly applies to the RGB-D data from Kinect.We show learned dictionaries for a number of channels that exhibit different characteristics:grayscale/luminance,chromaticity(ab),depth,and surface normal.In Section3.2we show how the pixel-level sparse codes can be integrated through multi-scale pool-ing into a rich representation of oriented local neighborhoods.By computing oriented gradients on this high dimensional representation and using a double power transform to code the features for linear classification,we show a linear SVM can be efficiently and effectively trained for each orientation to classify contour vs non-contour,yielding local contrast estimates that are much more accurate than the hand-designed features in gPb.3.1Local Sparse Representation of RGB-(D)PatchesK-SVD and Orthogonal Matching Pursuit.K-SVD[1]is a popular dictionary learning algorithm that generalizes K-Means and learns dictionaries of codewords from unsupervised data.Given a set of image patches Y=[y1,···,y n],K-SVD jointlyfinds a dictionary D=[d1,···,d m]and an associated sparse code matrix X=[x1,···,x n]by minimizing the reconstruction errorminY−DX 2F s.t.∀i, x i 0≤K;∀j, d j 2=1(1) D,Xwhere · F denotes the Frobenius norm,x i are the columns of X,the zero-norm · 0counts the non-zero entries in the sparse code x i,and K is a predefined sparsity level(number of non-zero en-tries).This optimization can be solved in an alternating manner.Given the dictionary D,optimizing the sparse code matrix X can be decoupled to sub-problems,each solved with Orthogonal Matching Pursuit(OMP)[18],a greedy algorithm forfinding sparse codes.Given the codes X,the dictionary D and its associated sparse coefficients are updated sequentially by singular value decomposition. For our purpose of representing local patches,the dictionary D has a small size(we use75for5x5 patches)and does not require a lot of sample patches,and it can be learned in a matter of minutes. Once the dictionary D is learned,we again use the Orthogonal Matching Pursuit(OMP)algorithm to compute sparse codes at every pixel.This can be efficiently done with convolution and a batch version of the OMP algorithm[24].For a typical BSDS image of resolution321x481,the sparse code extraction is efficient and takes1∼2seconds.Sparse Representation of RGB-D Data.One advantage of unsupervised dictionary learning is that it readily applies to novel sensor data,such as the color and depth frames from a Kinect-style RGB-D camera.We learn K-SVD dictionaries up to four channels of color and depth:grayscale for luminance,chromaticity ab for color in the Lab space,depth(distance to camera)and surface normal(3-dim).The learned dictionaries are visualized in Fig.2.These dictionaries are interesting(a)Grayscale (b)Chromaticity (ab)(c)Depth (d)Surface normal Figure 2:K-SVD dictionaries learned for four different channels:grayscale and chromaticity (in ab )for an RGB image (a,b),and depth and surface normal for a depth image (c,d).We use a fixed dictionary size of 75on 5x 5patches.The ab channel is visualized using a constant luminance of 50.The 3-dimensional surface normal (xyz)is visualized in RGB (i.e.blue for frontal-parallel surfaces).to look at and qualitatively distinctive:for example,the surface normal codewords tend to be more smooth due to flat surfaces,the depth codewords are also more smooth but with speckles,and the chromaticity codewords respect the opponent color pairs.The channels are coded separately.3.2Coding Multi-Scale Neighborhoods for Measuring ContrastMulti-Scale Pooling over Oriented Half-Discs.Over decades of research on contour detection and related topics,a number of fundamental observations have been made,repeatedly:(1)contrast is the key to differentiate contour vs non-contour;(2)orientation is important for respecting contour continuity;and (3)multi-scale is useful.We do not wish to throw out these principles.Instead,we seek to adopt these principles for our case of high dimensional representations with sparse codes.Each pixel is presented with sparse codes extracted from a small patch (5-by-5)around it.To aggre-gate pixel information,we use oriented half-discs as used in gPb (see an illustration in Fig.1).Each orientation is processed separately.For each orientation,at each pixel p and scale s ,we define two half-discs (rectangles)N a and N b of size s -by-(2s +1),on both sides of p ,rotated to that orienta-tion.For each half-disc N ,we use average pooling on non-zero entries (i.e.a hybrid of average and max pooling)to generate its representationF (N )= i ∈N |x i 1| i ∈N I |x i 1|>0,···, i ∈N |x im | i ∈NI |x im |>0 (2)where x ij is the j -th entry of the sparse code x i ,and I is the indicator function whether x ij is non-zero.We rotate the image (after sparse coding)and use integral images for fast computations (on both |x ij |and |x ij |>0,whose costs are independent of the size of N .For two oriented half-dics N a and N b at a scale s ,we compute a difference (gradient)vector DD (N a s ,N b s )= F (N a s )−F (N b s ) (3)where |·|is an element-wise absolute value operation.We divide D (N a s ,N b s )by their norms F (N a s ) + F (N b s ) + ,where is a positive number.Since the magnitude of sparse codes variesover a wide range due to local variations in illumination as well as occlusion,this step makes the appearance features robust to such variations and increases their discriminative power,as commonly done in both contour detection and object recognition.This value is not hard to set,and we find a value of =0.5is better than,for instance, =0.At this stage,one could train a classifier on D for each scale to convert it to a scalar value of contrast,which would resemble the chi-square distance function in gPb.Instead,we find that it is much better to avoid doing so separately at each scale,but combining multi-scale features in a joint representation,so as to allow interactions both between codewords and between scales.That is,our final representation of the contrast at a pixel p is the concatenation of sparse codes pooled at all thescales s ∈{1,···,S }(we use S =4):D p = D (N a 1,N b 1),···,D (N a S ,N b S );F (N a 1∪N b 1),···,F (N a S ∪N b S ) (4)In addition to difference D ,we also include a union term F (N a s ∪N b s ),which captures the appear-ance of the whole disc (union of the two half discs)and is normalized by F (N a s ) + F (N b s ) + .Double Power Transform and Linear Classifiers.The concatenated feature D p (non-negative)provides multi-scale contrast information for classifying whether p is a contour location for a partic-ular orientation.As D p is high dimensional (1200and above in our experiments)and we need to do it at every pixel and every orientation,we prefer using linear SVMs for both efficient testing as well as training.Directly learning a linear function on D p ,however,does not work very well.Instead,we apply a double power transformation to make the features more suitable for linear SVMs D p = D α1p ,D α2p (5)where 0<α1<α2<1.Empirically,we find that the double power transform works much better than either no transform or a single power transform α,as sometimes done in other classification contexts.Perronnin et.al.[19]provided an intuition why a power transform helps classification,which “re-normalizes”the distribution of the features into a more Gaussian form.One plausible intuition for a double power transform is that the optimal exponent αmay be different across feature dimensions.By putting two power transforms of D p together,we allow the classifier to pick its linear combination,different for each dimension,during the stage of supervised training.From Local Contrast to Global Contours.We intentionally only change the local contrast es-timation in gPb and keep the other steps fixed.These steps include:(1)the Savitzky-Goley filter to smooth responses and find peak locations;(2)non-max suppression over orientations;and (3)optionally,we apply the globalization step in gPb that computes a spectral gradient from the local gradients and then linearly combines the spectral gradient with the local ones.A sigmoid transform step is needed to convert the SVM outputs on D p before computing spectral gradients.4ExperimentsWe use the evaluation framework of,and extensively compare to,the publicly available Global Pb (gPb)system [2],widely used as the state of the art for contour detection 1.All the results reported on gPb are from running the gPb contour detection and evaluation codes (with default parameters),and accuracies are verified against the published results in [2].The gPb evaluation includes a number of criteria,including precision-recall (P/R)curves from contour matching (Fig.4),F-measures computed from P/R (Table 1,2,3)with a fixed contour threshold (ODS)or per-image thresholds (OIS),as well as average precisions (AP)from the P/R curves.Benchmark Datasets.The main dataset we use is the BSDS500benchmark [2],an extension of the original BSDS300benchmark and commonly used for contour evaluation.It includes 500natural images of roughly resolution 321x 481,including 200for training,100for validation,and 200for testing.We conduct both color and grayscale experiments (where we convert the BSDS500images to grayscale and retain the groundtruth).In addition,we also use the MSRC2and PASCAL2008segmentation datasets [26,6],as done in the gPb work [2].The MSRC2dataset has 591images of resolution 200x 300;we randomly choose half for training and half for testing.The PASCAL2008dataset includes 1023images in its training and validation sets,roughly of resolution 350x 500.We randomly choose half for training and half for testing.For RGB-D contour detection,we use the NYU Depth dataset (v2)[27],which includes 1449pairs of color and depth frames of resolution 480x 640,with groundtruth semantic regions.We choose 60%images for training and 40%for testing,as in its scene labeling setup.The Kinect images are of lower quality than BSDS,and we resize the frames to 240x 320in our experiments.Training Sparse Code Gradients.Given sparse codes from K-SVD and Orthogonal Matching Pur-suit,we train the Sparse Code Gradients classifiers,one linear SVM per orientation,from sampled locations.For positive data,we sample groundtruth contour locations and estimate the orientations at these locations using groundtruth.For negative data,locations and orientations are random.We subtract the mean from the patches in each data channel.For BSDS500,we typically have 1.5to 21In this work we focus on contour detection and do not address how to derive segmentations from contours.pooling disc size (pixel)a v e r a g e p r e c i s i o na v e r a g e p r e c i s i o nsparsity level a v e r a g e p r e c i s i o n (a)(b)(c)Figure 3:Analysis of our sparse code gradients,using average precision of classification on sampled boundaries.(a)The effect of single-scale vs multi-scale pooling (accumulated from the smallest).(b)Accuracy increasing with dictionary size,for four orientation channels.(c)The effect of the sparsity level K,which exhibits different behavior for grayscale and chromaticity.BSDS500ODS OIS AP l o c a l gPb (gray).67.69.68SCG (gray).69.71.71gPb (color).70.72.71SCG (color).72.74.75g l o b a l gPb (gray).69.71.67SCG (gray).71.73.74gPb (color).71.74.72SCG (color).74.76.77Table 1:F-measure evaluation on the BSDS500benchmark [2],comparing to gPb on grayscaleand color images,both for local contour detec-tion as well as for global detection (-bined with the spectral gradient analysis in [2]).Recall P r e c i s i o n Figure 4:Precision-recall curves of SCG vs gPb on BSDS500,for grayscale and color images.We make a substantial step beyondthe current state of the art toward reachinghuman-level accuracy (green dot).million data points.We use 4spatial scales,at half-disc sizes 2,4,7,25.For a dictionary size of 75and 4scales,the feature length for one data channel is 1200.For full RGB-D data,the dimension is 4800.For BSDS500,we train only using the 200training images.We modify liblinear [7]to take dense matrices (features are dense after pooling)and single-precision floats.Looking under the Hood.We empirically analyze a number of settings in our Sparse Code Gradi-ents.In particular,we want to understand how the choices in the local sparse coding affect contour classification.Fig.3shows the effects of multi-scale pooling,dictionary size,and sparsity level (K).The numbers reported are intermediate results,namely the mean of average precision of four oriented gradient classifier (0,45,90,135degrees)on sampled locations (grayscale unless otherwise noted,on validation).As a reference,the average precision of gPb on this task is 0.878.For multi-scale pooling,the single best scale for the half-disc filter is about 4x 8,consistent with the settings in gPb.For accumulated scales (using all the scales from the smallest up to the current level),the accuracy continues to increase and does not seem to be saturated,suggesting the use of larger scales.The dictionary size has a minor impact,and there is a small (yet observable)benefit to use dictionaries larger than 75,particularly for diagonal orientations (45-and 135-deg).The sparsity level K is a more intriguing issue.In Fig.3(c),we see that for grayscale only,K =1(normalized nearest neighbor)does quite well;on the other hand,color needs a larger K ,possibly because ab is a nonlinear space.When combining grayscale and color,it seems that we want K to be at least 3.It also varies with orientation:horizontal and vertical edges require a smaller K than diagonal edges.(If using K =1,our final F-measure on BSDS500is 0.730.)We also empirically evaluate the double power transform vs single power transform vs no transform.With no transform,the average precision is 0.865.With a single power transform,the best choice of the exponent is around 0.4,with average precision 0.884.A double power transform (with exponentsMSRC2ODS OIS APgPb.37.39.22SCG.43.43.33PASCAL2008ODS OIS APgPb.34.38.20SCG.37.41.27Table2:F-measure evaluation comparing our SCG approach to gPb on two addi-tional image datasets with contour groundtruth: MSRC2[26]and PASCAL2008[6].RGB-D(NYU v2)ODS OIS AP gPb(color).51.52.37 SCG(color).55.57.46gPb(depth).44.46.28SCG(depth).53.54.45gPb(RGB-D).53.54.40SCG(RGB-D).62.63.54Table3:F-measure evaluation on RGB-D con-tour detection using the NYU dataset(v2)[27].We compare to gPb on using color image only,depth only,as well as color+depth.Figure5:Examples from the BSDS500dataset[2].(Top)Image;(Middle)gPb output;(Bottom) SCG output(this work).Our SCG operator learns to preservefine details(e.g.windmills,faces,fish fins)while at the same time achieving higher precision on large-scale contours(e.g.back of zebras). (Contours are shown in double width for the sake of visualization.)0.25and0.75,which can be computed through sqrt)improves the average precision to0.900,which translates to a large improvement in contour detection accuracy.Image Benchmarking Results.In Table1and Fig.4we show the precision-recall of our Sparse Code Gradients vs gPb on the BSDS500benchmark.We conduct four sets of experiments,using color or grayscale images,with or without the globalization component(for which we use exactly the same setup as in gPb).Using Sparse Code Gradients leads to a significant improvement in accuracy in all four cases.The local version of our SCG operator,i.e.only using local contrast,is already better(F=0.72)than gPb with globalization(F=0.71).The full version,local SCG plus spectral gradient(computed from local SCG),reaches an F-measure of0.739,a large step forward from gPb,as seen in the precision-recall curves in Fig.4.On BSDS300,our F-measure is0.715. We observe that SCG seems to pick upfine-scale details much better than gPb,hence the much higher recall rate,while maintaining higher precision over the entire range.This can be seen in the examples shown in Fig.5.While our scale range is similar to that of gPb,the multi-scale pooling scheme allows theflexibility of learning the balance of scales separately for each code word,which may help detecting the details.The supplemental material contains more comparison examples.In Table2we show the benchmarking results for two additional datasets,MSRC2and PAS-CAL2008.Again we observe large improvements in accuracy,in spite of the somewhat different natures of the scenes in these datasets.The improvement on MSRC2is much larger,partly because the images are smaller,hence the contours are smaller in scale and may be over-smoothed in gPb. As for computational cost,using integral images,local SCG takes∼100seconds to compute on a single-thread Intel Core i5-2500CPU on a BSDS image.It is slower than but comparable to the highly optimized multi-thread C++implementation of gPb(∼60seconds).Figure6:Examples of RGB-D contour detection on the NYU dataset(v2)[27].Thefive panels are:input image,input depth,image-only contours,depth-only contours,and color+depth contours. Color is good picking up details such as photos on the wall,and depth is useful where color is uniform(e.g.corner of a room,row1)or illumination is poor(e.g.chair,row2).RGB-D Contour Detection.We use the second version of the NYU Depth Dataset[27],which has higher quality groundtruth than thefirst version.A medianfiltering is applied to remove double contours(boundaries from two adjacent regions)within3pixels.For RGB-D baseline,we use a simple adaptation of gPb:the depth values are in meters and used directly as a grayscale image in gPb gradient computation.We use a linear combination to put(soft)color and depth gradients together in gPb before non-max suppression,with the weight set from validation.Table3lists the precision-recall evaluations of SCG vs gPb for RGB-D contour detection.All the SCG settings(such as scales and dictionary sizes)are kept the same as for BSDS.SCG again outperforms gPb in all the cases.In particular,we are much better for depth-only contours,for which gPb is not designed.Our approach learns the low-level representations of depth data fully automatically and does not require any manual tweaking.We also achieve a much larger boost by combining color and depth,demonstrating that color and depth channels contain complementary information and are both critical for RGB-D contour detection.Qualitatively,it is easy to see that RGB-D combines the strengths of color and depth and is a promising direction for contour and segmentation tasks and indoor scene analysis in general[22].Fig.6shows a few examples of RGB-D contours from our SCG operator.There are plenty of such cases where color alone or depth alone would fail to extract contours for meaningful parts of the scenes,and color+depth would succeed. 5DiscussionsIn this work we successfully showed how to learn and code local representations to extract contours in natural images.Our approach combined the proven concept of oriented gradients with powerful representations that are automatically learned through sparse coding.Sparse Code Gradients(SCG) performed significantly better than hand-designed features that were in use for a decade,and pushed contour detection much closer to human-level accuracy as illustrated on the BSDS500benchmark. Comparing to hand-designed features(e.g.Global Pb[2]),we maintain the high dimensional rep-resentation from pooling oriented neighborhoods and do not collapse them prematurely(such as computing chi-square distance at each scale).This passes a richer set of information into learn-ing contour classification,where a double power transform effectively codes the features for linear paring to previous learning approaches(e.g.discriminative dictionaries in[16]),our uses of multi-scale pooling and oriented gradients lead to much higher classification accuracies. Our work opens up future possibilities for learning contour detection and segmentation.As we il-lustrated,there is a lot of information locally that is waiting to be extracted,and a learning approach such as sparse coding provides a principled way to do so,where rich representations can be automat-ically constructed and adapted.This is particularly important for novel sensor data such as RGB-D, for which we have less understanding but increasingly more need.。
哈里伯顿仪器和服务明细
Bi-modal AcousTic Sensor (BAT™)
Bioassay Technical Support
BMR 100-Barrel Batch-Mixer Trailer
BondCem™ Cements
BondSeal™ Cement
Borate Crosslinked Fluids
AssetJournal™ Project Documentation Tool
AssetObserver™ real-time field surveillance
AssetPlanner™ Field Development Planning Software
AssetSolver™ real-time field management
CleanStream® Service
CleanWave™ Water Treatment System
CoalStim® Service
Cobra Frac® Service
CobraJet Frac® Service
CobraMax® H Fracturing Service
CobraMax® V Fracturing Service
Constant Volume Extractor (CVE )
Constrictor® Annular Barrier Tool
Control Line Clamps and Protectors
Conventional Full Closure System
Core Freezing
Core Gamma Logger
AutoLatch™ and Release Perforating Gun Connector
英文翻译——采用红外传感器网络对移动目标的计数英文翻译

Moving Object Counting with an InfraredSensor NetworkBy Chi-Keung KiABSTRACTWireless Sensor Network (WSN) has become a hot research topic recently.Great benefit can be gained through the deployment of the WSN over a wide range of applications,covering the domains of commercial, military as well as residential. In this project, we design a counting system which tracks people who pass through a detecting zone as well as the corresponding moving directions.Such a system can be deployed in traffic control, resource management, and human flow control. Our design is based on our self-made cost-effective Infrared Sensing Module board which co-operates with a WSN.The design of our system includes Infrared Sensing Module design, sensor clustering, node communication, system architecture and deployment.We conduct a series of experiments to evaluate the system performance which demonstrates the efficiency of our Moving Object Counting system. KEYWORDS Infrared radiation;Wireless Sensor Node1 Wireless Sensor Network1.1 Introduction to InfraredInfrared radiation is a part of the electromagnetic radiation with a wavelength lying between visible light and radio waves.Infrared have be widely used nowadays including data communications,night vision,object tracking and so on.People commonly use infrared in data communication,since it is easily generated and only suffers little from electromagnetic interference.Take the TV remote control as an example,which can be found in everyone's home.The infrared remote control systems use infrared light-emitting diodes (LEDs) to send out an IR (infrared) signal when the button is pushed.A different pattern of pulses indicates the corresponding button being pushed. To allow the control of multiple appliances such as a TV,VCR,and cable box,without interference,systems generally have a preamble and an address to synchronize the receiver and identify the source and location of the infrared signal.To encode the data, systems generally vary thewidth of the pulses (pulse-width modulation) or the width of the spaces between the pulses (pulse space modulation).Another popular system,bi-phase encoding,uses signal transitions to convey information.Each pulse is actually a burst of IR at the carrier frequency. A 'high' means a burst of IR energy at the carrier frequency and a 'low' represents an absence of IR energy.There is no encoding standard. However, while a great many home entertainment devices use their own proprietary encoding schemes, some quasi-standards do exist. These include RC-5, RC-6, and REC-80.In addition,many manufacturers,such as NEC,have also established their own standards.1.2 Wireless sensor networkWireless sensor network (WSN) is a wireless network which consists of a vast number of autonomous sensor nodes using sensors to monitor physical or environmental conditions, such as temperature,acoustics,vibration,pressure,motion or pollutants,at different locations.Each node in a sensor network is typically equipped with a wireless communications device,a small microcontroller, one or more sensors,and an energy source, usually a battery.The size of a single sensor node can be as large as a shoebox and can be as small as the size of a grain of dust,depending on different applications.The cost of sensor nodes is similarly variable,ranging from hundreds of dollars to a few cents, depending on the size of the sensor network and the complexity requirement of the individual sensor nodes.The size and cost are constrained by sensor nodes,therefore,have result in corresponding limitations on available inputs such as energy,memory, computational speed and bandwidth.The development of wireless sensor networks (WSN) was originally motivated by military applications such as battlefield surveillance.Due to the advancement in micro-electronic mechanical system technology (MEMS),embedded microprocessors,and wireless networking,the WSN can be benefited in many civilian application areas,including habitat monitoring,healthcare applications,and home automation.1.3 Types of Wireless Sensor NetworksWireless sensor network nodes are typically less complex than general-purpose operating systems both because of the special requirements of sensor network applicationsand the resource constraints in sensor network hardware platforms.The operating system does not need to include support for user interfaces. Furthermore,the resource constraints in terms of memory and memory mapping hardware support make mechanisms such as virtual memory either unnecessary or impossible to implement.Tiny OS is possibly the first operating system specifically designed for wireless sensor networks.Unlike most other operating systems,Tiny OS is based on an event-driven programming model instead of multithreading.Tiny OS programs are composed into event handlers and tasks with run to completion-semantics.When an external event occurs,such as an incoming data packet or a sensor reading,TinyOS calls the appropriate event handler to handle the event.The TinyOS and programs are both written in a special programming language called NesC which is an extension to the C programming language.NesC is designed to detect race conditions between tasks and event handlers. There are also operating systems that allow programming in C. Examples of such operating systems include Contiki ,and MANTIS. Contiki is designed to support loading modules over the network and run-time loading of standard ELF files.The Contiki kernel is event-driven,like TinyOS, but the system supports multithreading on a per-application basis. Unlike the event-driven Contiki kernel,the MANTIS kernel is based on preemptive multithreading.With preemptive multithreading, applications do not need to explicitly yield the microprocessor to other processes.1.4 Introduction to Wireless Sensor NodeA sensor node, also known as a mote, is a node in a wireless sensor network that is capable of performing processing, gathering sensory information and communicating with other connected nodes in the network.Sensor node should be in small size,consuming extremely low energy,autonomous and operating unattended,and adaptive to the environment.As wireless sensor nodes are micro-electronic sensor device, they can only be equipped with a limited power source.The main components of a sensor node include sensors,microcontroller,transceiver,and power source.Sensors are hardware devices that can produce measurable response to a change in a physical condition such as light density and sound density.The continuous analog signal collected by the sensors is digitized by Analog-to-Digital converter.The digitized signal is then passed to controllers for furtherprocessing.Most of the theoretical work on WSNs considers Passive and Omni directional sensors.Passive and Omni directional sensors sense the data without actually manipulating the enviro nment with active probing,while no notion of “direction”is involved in these monly people deploy sensor for detecting heat (e.g. thermal sensor), light (e.g. infrared sensor), ultra sound (e.g. ultrasonic sensor), or electromagnetism (e.g. magnetic sensor).In practice,a sensor node can equip with more than one sensor. Micro-controller performs tasks,processes data and controls the operations of other components in the sensor node.The sensor node is responsible for the signal processing upon the detection of the physical events as needed or on demand.It handles the interruption from the transceiver.In addition, it deals with the internal behavior, such as application-specific computation.The function of both transmitter and receiver are combined into a single device known as transceivers that are used in sensor nodes.Transceivers allow a sensor node to exchange information between the neighboring sensors and the sink node (a central receiver).The operational states of a transceiver are Transmit,Receive,Idle and Sleep. Power is stored either in the batteries or the capacitors.Batteries are the main source of power supplying for the sensor nodes.Two types of batteries used are chargeable and non-rechargeable. They are also classified according to electrochemical material used for electrode such as Nickel-cadmium,Nickel-zinc,Nickel metal hydride,and Lithium-Ion. Current sensors are developed which are able to renew their energy from solar to vibration energy.Two major power saving policies used are Dynamic Power Management and Dynamic V oltage Scaling. DPM takes care of shutting down parts of sensor node which are not currently used or active.DVS scheme varies the power levels depending on the non-deterministic workload. By varying the voltage along with the frequency, it is possible to obtain quadratic reduction in power consumption.1.5 ChallengesThe major challenges in the design and implementation of the wireless sensor network are mainly the energy limitation, hardware limitation and the area of coverage.Energy is the scarcest resource of WSN nodes, and it determines the lifetime of WSN nodes.WSNnodes are meant to be deployed in large numbers in various environments, including remote and hostile regions,with ad-hoc communications as key.For this reason, algorithms and protocols need to be lifetime maximization,robustness and fault tolerance and self-configuration.The challenge in hardware is to produce low cost and tiny sensor nodes. With respect to these objectives,current sensor nodes usually have limited computational capability and memory space. Consequently,the application software and algorithms in WSN should be well-optimized and condensed.In order to maximize the coverage area with a high stability and robustness of each signal node, multi-hop communication with low power consumption is preferred.Furthermore,to deal with the large network size, the designed protocol for a large scale WSN must be distributed.1.6 Research IssuesResearchers are interested in various areas of wireless sensor network, which include the design, implementation and operation.These include hardware,software and middle-ware,which means primitives between the software and the hardware.As the WSNs are generally deployed in the resources-constrained environments with battery operated nodes,the researchers are mainly focus on the issues of energy optimization, coverage areas improvement,errors reduction,sensor network application,data security,sensor node mobility, and data packet routing algorithm among the sensors.In literature, a large group of researchers devoted a great amount of effort in the WSN.They focused in various areas, including physical property,sensor training,security through intelligent node cooperation, medium access,sensor coverage with random and deterministic placement, object locating and tracking, sensor location determination,addressing,energy efficient broadcasting and active scheduling,energy conserved routing,connectivity,data dissemination and gathering,sensor centric quality of routing, topology control and maintenance, etc.REFERENCE[1] G . 5 . Cheung , J . Y . M , Azzi , 0 . Intelligenc in building : the prtential advanced modelling Loveday . D . L . Virk . Automation in Construction . 1997:447-461.[2] Kirill Yelizarov v . home security System . Microchip Technology InC .1998:44-48.[3] B.D.Moore. Tradeoffs in selecting IC temperature sensors. Microprocessors and Microsystems, 1999, 23:181-184.[4] AT89C51 DATA SHEEP Philips Semiconductors 1999:55-58.[5]Yang. Y., Yi. J., Woo, Y.Y., and Kim. B·Optimum design for linearity and efficiency of microwave Doherty amplifier using a new load matching technique, Microw. J., 2001, 44:20–36.采用红外传感器网络对移动目标的计数作者Chi-Keung Ki摘要近来,无线传感器网络(WSN)已经成为一个热点的研究方向。
SCHIEBEL电动执行器技术参数表说明书

TREIBENDE KRAFT FAILSAFE - ACTUSAFETechnical data sheet- PowerFlue gas treatmentHydro power plants Biomass power plants Nuclear power plants Boiler construction- Oil and GasReGas storagesTPower Plant Nueva CTE Habanaend user:Santa Cruz del NorteCubaSchiebel actuators in use:120 pcsCogeneration plant Salzburg RVL Lenzing - waste industryWORKING PRINCIPLEIn normal operation, the electromagnetic clutch is activated and couples the actuator and the failsafe unit. The movement of the actuator is transferred to the output of the failsafe unit, so the fi nal control element is oper-ated according to the position of the actuator.In case of power failure or releasing the ESD command via a cable or bus, the electromagnetic clutch opens and separates the self-locking actuator from the failsafe unit. Now the preloaded spring package is able to Ball screw spindle Spindle nutMultiturn actuatorDisc spring packageHydraulic damper DIMENSIONAL DRAWINGS WIRING DIAGRAMSStandard linear actuator controlled ACTUSAFE unit Assembling consoleControl Eddy current brakeDisc brake package switchSpindle nut Eddy current brakeBall screw spindleDisc brake package Parking brakeSpindle nuthand wheel engaged hand wheel disengagedIn normal operation, the electromagnetic clutch is activated and couples the actuator and the failsafe unit. The movement of the actuator is transferred to the output of the failsafe unit, so the fi nal control element is operated according to the position of the actuator.In case of power failure or releasing the ESD command via a cable or bus, the electromagnetic clutch opens and separates the self-locking actuator from the failsafe unit. Now the preloaded spring package is able to release, by moving the output unit with the fi nal control element into the failsafe position.The speed of this movement (failsafe speed) is limited by a maintenance free eddy current brake.The position of the fi nal control element is permanently monitored with the position sensing, so no start-up procedure is necessary for the failsafe unit to be re-armed.In case of activating the manual override a failsafe operation will be triggered by opening the electromagnetic clutch. After completion of the the move-ment, the fi nal control element can be moved in every position by the hand wheel.To deactivate the manual override the fi nal control element must be moved back into the failsafe position by the hand-wheel and the override must beMultiturn actuatorrackpinionDisc spring packageSpindle nutBall screw spindle Pinion reducer Eddy current brake Parking brakeThree phase AC motor DIMENSIONAL DRAWINGS WIRING DIAGRAMSSCHIEBELAntriebstechnik Ges.m.b.H.Josef-Benc-Gasse 41230 Vienna, AustriaT: +43 (0)1 66 108-0F: +43 (0)1 66 108-4*****************/actuators Niederlassungen / Branches : ■ Vertriebspartner / Sales partners:。
GP2Y0A02YK0F 无触摸开关距离测量传感器单元说明说明书
GP2Y0A02YK0FGP2Y0A02YK0FDistance Measuring Sensor Unit Measuring distance: 20 to 150 cm Analog output type■Applications1. Touch-less switch(Sanitary equipment, Control of illumination, etc. )2. Sensor for energy saving(ATM, Copier, Vending machine, Laptop computer, LCD monitor)3. Amusement equipment(Robot, Arcade game machine)■Features1. Distance measuring range : 20 to 150 cm2. Analog output type3. Package size : 29.5×13×21.6 mm4. Consumption current : Typ. 33 mA5. Supply voltage : 4.5 to 5.5 V■DescriptionGP2Y0A02YK0F is a distance measuring sensor unit,composed of an integrated combination of PSD(position sensitive detector) , IRED (infrared emitting diode) and signal processing circuit.The variety of the reflectivity of the object, theenvironmental temperature and the operating duration are not influenced easily to the distance detection because of adopting the triangulation method.This device outputs the voltage corresponding to the detection distance. So this sensor can also be used as a proximity sensor.■Agency approvals/Compliance1. Compliant with RoHS directive (2002/95/EC)Notice The content of data sheet is subject to change without prior notice.In the absence of confirmation by device specification sheets, SHARP takes no responsibility for any defects that may occur in equipment using any SHARP■Block diagram■Outline Dimensions(Unit : mm)Product mass : approx. 4.8gSignalprocessing circuitPSDLEDDistance measuring ICVoltage regulatorOscillation circuitOutput circuitLED drive circuit①V O②GND③V CCStampStamp (Example)Model nameLight detector sideConnectorPWBLens caseLight emitter sideNote 1. Unspecified tolerances shall be ± 0.3 mm.Note 2. The connector is made by J.S.T.TRADING COMPANY,LTD. and its part number is S3B-PH.Note 3. The dimensions in parenthesis are shown for reference.Note 4. The dimension marked by “*” show a distance from/to the center of an internal optical slit.Production year : Last digit of prod. yearProduction month : Jan. to Sep. ; 1 to 9Oct. ; X, Nov. ; Y , Dec. ; Z TerminalSymbol ①Output terminal voltage V O ②GroundGND ③Supply voltageV CC**(T a =25℃,V CC =5V)ParameterSymbol ConditionsRating Unit Supply voltageV CC4.5 to5.5V■Absolute Maximum RatingsSymbol Rating Unit Supply voltageV CC -0.3 to +7V Output terminal voltage V O -0.3 to V CC +0.3V Operating temperature T opr -10 to +60℃Storage temperatureT stg-40 to +70℃Parameter■Electro-optical Characteristics* L : Distance to reflective objectNote 1 : Using reflective object : White paper (Made by Kodak Co., Ltd. gray cards R-27・white face, reflectance; 90%)ParameterSymbol Conditions MIN.TYP.MAX.Unit Average supply current I CC L=150cm (Note 1)―3350mA Measuring distance range ΔL (Note 1)20―150cm Output voltageV O L=150cm (Note 1)0.250.40.55V 2.3VOutput voltage difference between L=20cm and L=150cm (Note 1)ΔV OOutput voltage differential1.82.05■Recommended operating conditions(T a =25℃,V CC =5V)Fig. 1 Timing chartVcc(Power supply)nth outputnthmeasurementSecondmeasurementFirst measurementSecond outputFirst output Unstable output MAX 5.0ms38.3ms±9.6msDistance measuring operatingVo(Output)Fig. 2 Example of distance measuring characteristics (output)00.511.522.530102030405060708090100110120130140150Distance to reflective object L [cm]O u t p u t v o l t a g e [V ]White paper (Reflectance ratio : 90 %)Gray paper (reflectance ratio : 18 %)00.511.522.5300.010.020.030.040.050.060.070.080.090.1Inverse number of distance [1/cm]O u t p u t v o l t a g e [V ]White paper (Reflectance ratio : 90 %)Gray paper (reflectance ratio : 18 %)150cm100cm60cm50cm 40cm 30cm20cm15cm10cm■Notes●Advice for the optics• The lens of this device needs to be kept clean. There are cases that dust, water or oil and so on deteriorate the characteristics of this device. Please consider in actual application.• Please don’t do washing. Washing may deteriorate the characteristics of optical system and so on.Please confirm resistance to chemicals under the actual usage since this product has not been designed against washing.●Advice for the characteristics• In case that an optical filter is set in front of the emitter and detector portion, the optical filter which has the most efficient transmittance at the emitting wavelength range of LED for this product (λ = 850 ± 70nm), shall berecommended to use. Both faces of the filter should be mirror polishing. Also, as there are cases that the characteristics may not be satisfied according to the distance between the protection cover and this product or the thickness of the protection cover, please use this product after confirming the operation sufficiently in actual application.• In case that there is an object near to emitter side of the sensor between sensor and a detecting object, please use this device after confirming sufficiently that the characteristics of this sensor do not change by the object.• When the detector is exposed to the direct light from the sun, tungsten lamp and so on, there are cases that it can not measure the distance exactly. Please consider the design that the detector is not exposed to the direct light from such light source.• Distance to a mirror reflector can not be sometimes measured exactly.In case of changing the mounting angle of this product, it may measure the distance exactly.• In case that reflective object has boundary line which material or color etc. are excessively different, in order todecrease deviation of measuring distance, it shall be recommended to set the sensor that the direction of boundary line and the line between emitter center and detector center are in parallel.• In order to decrease deviation of measuring distance by moving direction of the reflective object, it shall be recommended to set the sensor that the moving direction of the object and the line between emitter center and detector center are vertical.●Advice for the power supply • In order to stabilize power supply line, we recommend to insert a by-pass capacitor of 10μF or morebetween Vcc and GND near this product.(Incorrect)(Correct)(Incorrect)(Moving direction)(Correct)(Moving direction)●Notes on handling• There are some possibilities that the internal components in the sensor may be exposed to the excessive mechanical stress. Please be careful not to cause any excessive pressure on the sensor package and also on the PCB while assembling this product.●Presence of ODC etc.This product shall not contain the following materials.And they are not used in the production process for this product.Regulation substances : CFCs, Halon, Carbon tetrachloride, 1.1.1-Trichloroethane (Methylchloroform) Specific brominated flame retardants such as the PBB and PBDE are not used in this product at all.This product shall not contain the following materials banned in the RoHS Directive (2002/95/EC).• Lead, Mercury, Cadmium, Hexavalent chromium, Polybrominated biphenyls (PBB),Polybrominated diphenyl ethers (PBDE).■Package specificationProductTrayMAX. 50 pieces per tray■Important Notices· The circuit application examples in this publication are provided to explain representative applications of SHARP devices and are not intended to guarantee any circuit design or license any intellectual property rights. SHARP takes no responsibility for any problems related to any intellectual property right of a third party resulting from the use of SHARP's devices.· Contact SHARP in order to obtain the latest device specifi-cation sheets before using any SHARP device. SHARP reserves the right to make changes in the specifications, characteristics, data, materials, structure, and other contents described herein at any time without notice in order to improve design or reliability. Manufacturing locations are also subject to change without notice.· Observe the following points when using any devices in this publication. SHARP takes no responsibility for damage caused by improper use of the devices which does not meet the conditions and absolute maximum ratings to be used specified in the relevant specification sheet nor meet the following condi-tions:(i) The devices in this publication are designed for use in general electronic equipment designs such as:--- Personal computers--- Office automation equipment--- Telecommunication equipment [terminal]--- Test and measurement equipment--- Industrial control--- Audio visual equipment--- Consumer electronics(ii) Measures such as fail-safe function and redundant design should be taken to ensure reliability and safety when SHARP devices are used for or in connection with equipment that requires higher reliability such as:--- Transportation control and safety equipment (i.e.,aircraft, trains, automobiles, etc.)--- Traffic signals--- Gas leakage sensor breakers--- Alarm equipment--- Various safety devices, etc.(iii) SHARP devices shall not be used for or in connection with equipment that requires an extremely high level of reliability and safety such as:--- Space applications--- Telecommunication equipment [trunk lines]--- Nuclear power control equipment--- Medical and other life support equipment (e.g.,scuba).· If the SHARP devices listed in this publication fall within the scope of strategic products described in the Foreign Exchange and Foreign Trade Law of Japan, it is necessary to obtain approval to export such SHARP devices.· This publication is the proprietary product of SHARP and is copyrighted, with all rights reserved. Under the copy-right laws, no part of this publication may be repro-duced or transmitted in any form or by any means, electronic or mechanical, for any purpose, in whole or in part, without the express written permission of SHARP. Express written permission is also required before any use of this publication may be made by a third party.· Contact and consult with a SHARP representative if thereare any questions about the contents of this publication.。
Current detection circuit
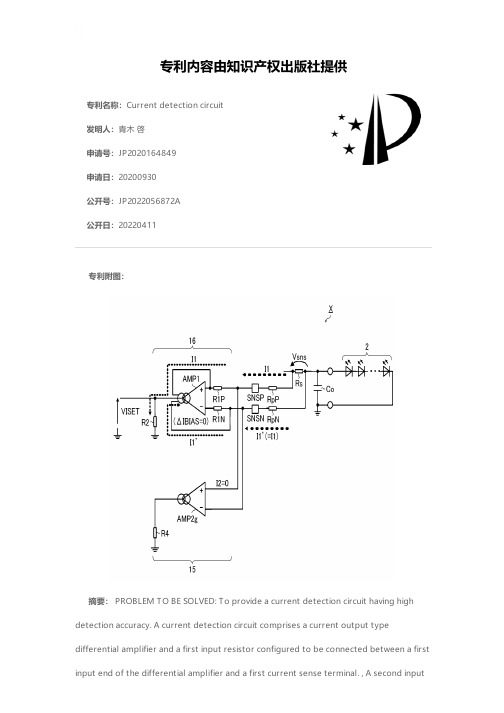
专利名称:Current detection circuit发明人:青木 啓申请号:JP2020164849申请日:20200930公开号:JP2022056872A公开日:20220411专利内容由知识产权出版社提供专利附图:摘要: PROBLEM TO BE SOLVED: To provide a current detection circuit having high detection accuracy. A current detection circuit comprises a current output typedifferential amplifier and a first input resistor configured to be connected between a first input end of the differential amplifier and a first current sense terminal. , A second inputresistor configured to be connected between the second input end of the differential amplifier and a second current sense terminal, and a second input resistor configured to be connected to the output end of the differential amplifier. An output resistor, a first feedback current path configured to allow a first feedback current to flow between the first input end and the output end of the differential amplifier, and the second current sense terminal and the differential. It has a second feedback current path configured to allow a second feedback current to flow between the output end of the amplifier. [Selection diagram] FIG. 12申请人:ローム株式会社地址:京都府京都市右京区西院溝崎町21番地国籍:JP代理人:特許業務法人 佐野特許事務所更多信息请下载全文后查看。
一种点目标探测系统能量集中度计算方法

一种点目标探测系统能量集中度计算方法杨天远;周峰;行麦玲【摘要】在点目标探测系统中,光学系统的能量集中度决定了单个像元收集到点目标能量的水平,直接影响点目标探测系统的图像信噪比.在相机设计完成后,需要对相机的能量集中度进行测试,评价相机的性能.传统方法对点目标探测系统的能量集中度计算采用"中心像元法",由于相机探测器中心位置偏移和靶标尺寸的影响,计算结果存在很大误差.文章通过建立点源靶标成像模型,分析出靶标尺寸和探测器位置对点目标像斑的影响,提出了求解点目标能量集中度的一般过程,并设计出了一种容易实现的计算方法.通过对点目标像斑进行高斯拟合,然后通过两次反卷积去除探测器位置和靶标尺寸的影响,实现了对能量集中度的求解.计算结果表明,文中提出的方法比传统方法更接近实际情况,具有工程应用价值.%In point target detection system, the energy collected by a single pixel is determined by the energy concentration degree of the optical system, which directly affect the detection signal to noise ratio. It is necessary to test the energy concentration degree after the completion of the camera design to evaluate the performance of the detection system. Traditionally, the energy concentration degree is calculated by dividing the sum of the point image energy by the center pixel energy. But the influence of the center pixel position offset and the size of the point target will lead to a big error. Through the establishment of a point source target imaging model, the influence of the center pixel position offset and the size of the point target is analyzed. The general process is offered for solving the point target energy concentration degree. And an easily achievable calculation methodis designed. After the Gaussian fitting of the sampling result, the deconvolution is applied twice to eliminate the influence of the centerpixel position offset and the size of the point target, and then the high precision solution of energy concentration degree is obtained. The calculation results show that this method is more close to actual situation than the traditional method, which has engineering application value.【期刊名称】《航天返回与遥感》【年(卷),期】2017(038)002【总页数】7页(P41-47)【关键词】能量集中度;高斯拟合;反卷积;点目标探测;空间相机【作者】杨天远;周峰;行麦玲【作者单位】北京空间机电研究所,北京 100094;北京空间机电研究所,北京100094;北京空间机电研究所,北京 100094【正文语种】中文【中图分类】TP391.41点目标的图像信噪比是评价点目标图像的主要参数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Current Sensing Completion Detection for Subthreshold Asynchronous CircuitsOmer Can Akgun,Yusuf Leblebici,Eric A.VittozSwiss Federal Institute of Technology(EPFL)Microelectronic Systems Laboratory(LSM)Lausanne,CH-1015,SwitzerlandE-mail:{omercan.akgun,yusuf.leblebici,eric.vittoz}@epfl.chAbstract—In this paper a novel completion detection method for self-timed,asynchronous subthreshold circuits is presented. By employing the self-timed operation principle,substantial speed gains in the operation of the asynchronous pipelines can be realized.The completion detection system is very simple,con-sisting of a sensor transistor,a very basic AC-coupled amplifier and a monostable multivibrator.The proposed method can be easily integrated into the CMOS designflow.The advantages of the proposed completion detection system is shown through simulations on an16-bit ripple carry adder in a standard0.18µm CMOS process operating at400mV supply voltage.I.I NTRODUCTIONPower density and power consumption of complex digital systems has become a major concern during the recent years, both due to thermal concerns and due to limited battery life-time in mobile applications.Any significant reduction in power dissipation can only be achieved by lowering the operating voltage of the circuits.This would be possible by relaxing the constraints of classical strong-inversion operation of MOS-FETs,and by accepting the notion that transistors can(and will)be operated well below threshold,in the subthreshold (weak-inversion)regime.In subthreshold mode of operation,the supply voltage can be scaled aggressively and power dissipation can be decreased significantly.There are successful implementations of digital circuits working in the subthreshold region[1]–[3]and tech-niques to improve the performance of subthreshold CMOS circuits have also been proposed[4].Subthreshold operation of static CMOS logic has been analytically analyzed using the EKV model in[5].According to the analysis,to benefit the most from the subthreshold operation,the logic circuits should be run at their maximum operating frequency with an activity factorαas close to1as possible.Maximizingαis non-trivial in synchronous circuits.Be-cause of thefixed time slot for computation,data-dependent processing times cannot be exploited in synchronous opera-tion.Also in a synchronous system,power is consumed with each clock transition regardless of the data or state change. Although clock gating has been proposed as a solution to this problem[6],it cannot provide a comprehensive solution to the problem of data-dependent computation times.On the other hand,asynchronous circuits do not consume clocking power and have the potential of operating with tunable voltage supplies at anαfactor of1at the optimum supply voltage.In addition,asynchronous operation also enables the absorption of time-domain(delay)variations that inevitably become more prominent in the subthreshold regime due to the device pa-rameter and temperature variations.Therefore,implementation of efficient asynchronous circuits operating in subthreshold regime would be a subject of high interest.In this work,we demonstrate a novel completion detection system(CDS)for self-timed circuits based on current sensing. The proposed CDS can operate in the subthreshold regime and sense currents in the pA-nA range.The proof of concept is shown by using the proposed system to generate the completion detection signals for an16-bit ripple carry adder. It has been observed that the improvement in the delay of the overall circuit operation is significant,justifying the use of the CDS.The remainder of the paper is organized as follows.In Section II the basic current equations for MOS transistors operating in the weak inversion regime is given.In Section III the novel CDS is proposed in the context of a4-phase bundled data pipeline.Section IV shows the application and improvements due to the CDS in terms of the delay of the pipeline stage.II.MOS W EAK I NVERSION O PERATIONThe MOS digital circuits operate in subthreshold regime when the supply voltage is lower than the threshold voltage (V T)of the transistors.The drain current of an n-channel MOS transistor operating in this regime is given by[5]I DS=I S expV GS−V TnU T 1−exp−V DS U T(1)where n is a process dependent term called slope factor and is typically in the range of1.3−1.5for modern CMOS processes. The value of n depends on the depletion region characteristics of the transistor.V GS and V DS are the gate to source and drain to source voltages,respectively.The parameter I S is the specific current which is given by,I S=2nµC ox U2TWL(2) whereµis the mobility of carriers,C ox is the gate oxide capacitance per unit area,U T is the thermal voltage whose(b)Computation based delay implementation Fig.1.4-phase bundled data pipeline(After[7]).value is26mV at300K and WL is the aspect ratio of thetransistor.Due to the second term in(1),the drain current is0when V DS=0but reaches its maximum value and saturates with V DS values higher than a few U T.As it is apparent from(1), the drain current of a MOS transistor in subthreshold region shows exponential dependence on the gate-to-source,drain-to-source voltages,slope factor and the operating temperature. To alleviate the problems resulting from the exponential de-pendence on the supply voltage,process parameters and the operating temperature,self-timed circuits emerge as strong candidates for subthreshold operation.III.C OMPUTATION B ASED D ELAY Asynchronous circuits are fundamentally different from their synchronous counterparts.Although the signaling con-vention is binary,the data propagation through the stages take place by employing handshaking signals,not by using a common clock.A basic4-phase,bundled data asynchronous pipeline is shown in Fig.1.In Fig.1(a)the most common implementation(fixed delay)is shown.In thisimplementation the Request signal is delayed by an amount equal to the worst case delay of the purely combinational logic stage. This implementation is a similar approach to the synchronous operation,where unnecessary delay,which isfixed regardless of the logic computation time,is introduced.Another version of the4-phasebundled data pipeline is shownin Fig.1(b),where the delay should mimic the computation completion time of the logic block as much as possible.In the literature there are examples of completion detection using current sensing methods[8],[9].The techniques in the mentionedpapers use either bipolar transistors,which are not available in standard CMOS processes,or high valued resistors.Although these techniques can be used for detectingDelaycontrolDelaycontrolFig.2.Low V T PMOS current sensor used to detect the operation of the combinational block.Delaycontrolputation signature detected as the temporary drop of the supply voltage at the drain node of the current sensor device.current values in theµA-mA range,they cannot be used for detecting the currents for subthreshold operation which are in the pA-nA range because of the highβrequirements of the bipolar transistors and difficulty in implementing very high value resistors.In this paper we propose a new current sensing technique using a single low threshold voltage(V T)MOS transistor. The basic idea is shown in Fig.2.In this implementation, the current signal is sensed by the diode connected low V T PMOS transistor,converted to a voltage signal and compressed in the log domain.The conceptual waveform that corresponds to the combinational block processing a new input set is shown in Fig.3.Two operation regions can be discerned in thefigure.One is the time when the actual computation is taking place and the other is the settling of the supply node of the combinational logic block.The settling time depends on the capacitance of the supply node of the logic block and the resistance of the diode connected PMOS transistor.In order to avoid excessive computation delay when compared to the standard implementation,the resistance of the diode connected transistor should be kept as small as possible.The computation time comparison of an16-bit ripple carry adder with and without the sensor transistor is shown in Fig.4.In thefigure the x-axis shows the computation time of the adder block which is directly connected to the supply voltage and the y-axis shows the computation time of the adder which is connected to the sensor transistor.Each individual data point corresponds to a randomly generated input vector,resulting in a spread of computation(completion)times.As it is apparent from thefigure,the adder with the sensor transistor takes about 40%more time for computation,on average.C om p u t a t i o n t i m e w i t h t h e s e n s o r (u s )Computation time without the sensor (us)Fig. parison of computation time of the 16bit adderwith and without the sensor transistor,where each data point corresponds to a randomly generated input vector.Fig.5.Block diagram of the proposed completion detection system.The complete CDS consists of the sensing low V T transis-tor,an AC-coupled amplifier and a monostable multivibrator (Fig.5).After sensing the current signal and converting to a log-compressed voltage signal,amplification of this signal is necessary before feeding it into the monostable multivibrator.The basic AC-coupled amplifier used for amplification is shown in Fig.6.Diode connected transistors mp 1and mn 1bias the transistors mp 2and mn 2,which are acting as an amplifier,at the maximum gain point for a given size and DC level.By changing the transistor sizes,the frequency response of the amplifier can be changed and there is a trade off between the gain required from the AC-coupled amplifier and the delay caused by the sensor transistor.If greater delay caused byFig.6.AC-coupled amplifier used to amplify the detected signal.Fig.7.Basic monostable multivibrator with variable resistor.the sensor transistor (larger spikes in the supply node of the combinational logic block)can be tolerated,the gain,thus the power consumption of the AC-coupled amplifier can be reduced.The monostable multivibrator [10]is used for converting the sensed signal to a pulse,whose width is proportional to the time spent during computation (shown in Fig.7).In this monostable multivibrator implementation,a PMOS transistor acts as a variable resistor,whose resistance is modulated by the amplified current signal.By modulating the instantaneous resistance of the PMOS transistor,the RC time constant of the multivibrator is modulated as well,resulting in a pulse whose width is proportional to the area under the current curve of the combinational block.The pulse width of the multivibrator is given by equation (3)T =C (R +R on )ln R R +R on V DDV DD −V th(3)where R is the average resistance of the PMOS transistor during pulse generation,R on is the resistance of the NOR gate and V th is switching threshold of the inverter.Assuming R on <<R and V th =V DD /2,equation (3)can be simplified as T =0.69CR .This means the pulse generated by the monostable multivibrator will be compressed by a factor of 0.69compared to the actual computation time in the ideal case.101520253035400.00.20.4Trigger101520253035400.00.20.4n1101520253035400.00.20.4time(us)n3Fig.8.Monostable multivibrator node voltages.The pulse width of the signal at n1is proportional to the control voltage,and hence,to the actual completion time of the combinational block.In the standard implementation of the multivibrator,node n3is used as the output.For some cases,the resistance of the PMOS transistor might be too low,so a very fast switching occurs at node n2and no switching occurs at node n3,resulting in no signal generation.To prevent this situation, signal at node n1was used as the output.The node voltage waveforms of the multivibrator are shown in Fig.8,for four consecutive and different control voltages.The signal at n1 goes low when the trigger signal goes high and if there is no change in the signal at n3,it goes high as the trigger signal goes low.This operation guarantees a completion detection signal is generated for each trigger input.The minimum width of the completion detection pulse is thus set by the trigger pulse width,setting the minimum delay of the Request signal of the preceding stage.IV.S IMULATION R ESULTSTo prove the effectiveness of the proposed completion detection method,the concept was applied to an16-bit ripple carry adder in a standard0.18µm process.The simulations on the adder were run for1000random input vectors,and the pulse width of the completion detection signal,representing the delay of the Request signal,were measured.The results of the simulations for V DD=0.4V operation are shown in Fig.9. In thefigure,the response of the CDS is also plotted as a continuous curve on the y-axis and the maximum computation time for the sample data set is marked with a horizontal line.The shaded area under the curve below the marker line represents the gain in the operation speed of the asynchronous pipeline with regards to the worst case computation delay in the applied data set.By changing the R and C values of the multivibrator and matching the slowest response to the worst case delay of the combinational logic block,substantial gain in the speed of any logic pipeline can be realized.A dashed line with a slope of1is also drawn in thefigure as a reference. As long as all the data points are above this curve,the delayed Request signal will not arrive at the next stage before the computation is completed.The pulse width(delay)generated by the completion detection circuitry and the computation time has a correlation coefficient of0.8,showing a clear correlation between the computation time and the generated delay.The data points in Fig.9have a slope of0.6,close to the expected value of0.69,which clearly shows the compression of the computation time by the monostable multivibrator.It can be seen that the mean delay is improved by about32%compared to the maximum(worst-case)computation time,and by16% compared to the worst-case delay even without the influence of the sensor device.Due to the AC-coupled amplifier there is a static power consumption of1nW.V.C ONCLUSIONSIn this work a novel completion detection system based on current sensing has been demonstrated.The proposed system can be integrated into the standard CMOS designflow very easily.The current sensing completion detection system can operate with subthreshold and superthreshold circuits withoutCompletiondetectionpulsewidth(us)Computation time (us)parison of the actual computation time of the16-bit adder and the monostable multivibrator response for randomly generated input vectors, showing the time-domain gain obtained by the proposed approach.any modification.The proposed CDS creates pulses highly correlated to the actual computation time.It can be concluded from the simulation results that the operating speed of any asynchronous pipeline can be increased substantially by intro-ducing computation based delay signal generation.The area of the proposed implementation is on the same order of the worst-case delay implementation with a very small overhead.R EFERENCES[1] A.Wang and A.Chandrakasan,“A180-mV subthreshold FFT processorusing a minimum energy design methodology,”IEEE Journal of Solid-State Circuits,vol.40,no.1,pp.310–319,2005.[2]J.Kao,M.Miyazaki,and A.Chandrakasan,“A175-mV multiply-accumulate unit using an adaptive supply voltage and body bias ar-chitecture,”IEEE Journal of Solid-State Circuits,vol.37,no.11,pp.1545–1554,2002.[3] C.-I.Kim,H.Soeleman,and K.Roy,“Ultra-low-power DLMS adaptivefilter for hearing aid applications,”IEEE Transactions on Very Large Scale Integration(VLSI)Systems,vol.11,no.6,pp.1058–1067,2003.[4]H.Soeleman,K.Roy,and B.Paul,“Robust subthreshold logic forultra-low power operation,”IEEE Transactions on Very Large Scale Integration(VLSI)Systems,vol.9,no.1,pp.90–99,2001.[5] E.Vittoz,Low-Power Electronics Design.CRC Press LLC,2004,ch.16.[6]V.Tiwari,D.Singh,S.Rajgopal,G.Mehta,R.Patel,and F.Baez,“Reducing power in high-performance microprocessors,”in Design Automation Conference,1998.Proceedings,June1998,pp.732–737.[7]J.Sparso and S.Furber,Eds.,Principles of Asynchronous Circuit Design-A Systems Perspective.Kluwer Academic Publishers,2001.[8]M.E.Dean,D.L.Dill,and M.Horowitz,“Self-timed logic usingcurrent-sensing completion detection(CSCD),”in International Con-ference on Computer Design,1991,pp.187–191.[9]mpinen and O.Vainio,“Dynamically biased current sensor forcurrent-sensing completion detection,”in Circuits and Systems,2001.ISCAS2001.The2001IEEE International Symposium on,vol.4,May 2001,pp.394–397.[10] A.S.Sedra and K.C.Smith,Microelectronic Circuits,4th ed.OxfordUniversity Press,1998.。