受水黾启发水上行走机器人控制系统开发.kdh
水上行走机器人
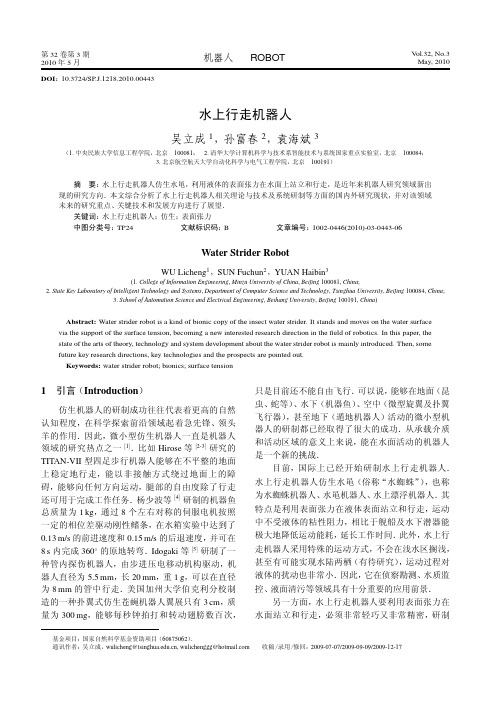
第32卷第3期2010年5月机器人ROBOT V ol.32,No.3May,2010DOI:10.3724/SP.J.1218.2010.00443水上行走机器人吴立成1,孙富春2,袁海斌3(1.中央民族大学信息工程学院,北京100081; 2.清华大学计算机科学与技术系智能技术与系统国家重点实验室,北京100084;3.北京航空航天大学自动化科学与电气工程学院,北京100191)摘要:水上行走机器人仿生水黾,利用液体的表面张力在水面上站立和行走,是近年来机器人研究领域新出现的研究方向.本文综合分析了水上行走机器人相关理论与技术及系统研制等方面的国内外研究现状,并对该领域未来的研究重点、关键技术和发展方向进行了展望.关键词:水上行走机器人;仿生;表面张力中图分类号:TP24文献标识码:B文章编号:1002-0446(2010)-03-0443-06Water Strider RobotWU Licheng1,SUN Fuchun2,YUAN Haibin3(1.College of Information Engineering,Minzu University of China,Beijing100081,China;2.State Key Laboratory of Intelligent Technology and Systems,Department of Computer Science and Technology,Tsinghua University,Beijing100084,China;3.School of Automation Science and Electrical Engineering,Beihang University,Beijing100191,China)Abstract:Water strider robot is a kind of bionic copy of the insect water strider.It stands and moves on the water surface via the support of the surface tension,becoming a new interested research direction in thefield of robotics.In this paper,the state of the arts of theory,technology and system development about the water strider robot is mainly introduced.Then,some future key research directions,key technologies and the prospects are pointed out.Keywords:water strider robot;bionics;surface tension1引言(Introduction)仿生机器人的研制成功往往代表着更高的自然认知程度,在科学探索前沿领域起着急先锋、领头羊的作用.因此,微小型仿生机器人一直是机器人领域的研究热点之一[1].比如Hirose等[2-3]研究的TITAN-VII型四足步行机器人能够在不平整的地面上稳定地行走,能以非接触方式绕过地面上的障碍,能够向任何方向运动,腿部的自由度除了行走还可用于完成工作任务.杨少波等[4]研制的机器鱼总质量为1kg,通过8个左右对称的伺服电机按照一定的相位差驱动刚性鳍条,在水箱实验中达到了0.13m/s的前进速度和0.15m/s的后退速度,并可在8s内完成360◦的原地转弯.Idogaki等[5]研制了一种管内探伤机器人,由步进压电移动机构驱动,机器人直径为5.5mm,长20mm,重1g,可以在直径为8mm的管中行走.美国加州大学伯克利分校制造的一种扑翼式仿生苍蝇机器人翼展只有3cm,质量为300mg,能够每秒钟拍打和转动翅膀数百次,只是目前还不能自由飞行.可以说,能够在地面(昆虫、蛇等)、水下(机器鱼)、空中(微型旋翼及扑翼飞行器),甚至地下(遁地机器人)活动的微小型机器人的研制都已经取得了很大的成功.从承载介质和活动区域的意义上来说,能在水面活动的机器人是一个新的挑战.目前,国际上已经开始研制水上行走机器人.水上行走机器人仿生水黾(俗称“水蜘蛛”),也称为水蜘蛛机器人、水黾机器人、水上漂浮机器人.其特点是利用表面张力在液体表面站立和行走,运动中不受液体的粘性阻力,相比于舰船及水下潜器能极大地降低运动能耗,延长工作时间.此外,水上行走机器人采用特殊的运动方式,不会在浅水区搁浅,甚至有可能实现水陆两栖(有待研究),运动过程对液体的扰动也非常小.因此,它在侦察勘测、水质监控、液面清污等领域具有十分重要的应用前景.另一方面,水上行走机器人要利用表面张力在水面站立和行走,必须非常轻巧又非常精密,研制基金项目:国家自然科学基金资助项目(60875062).通讯作者:吴立成,wulicheng@,wulichenggg@收稿/录用/修回:2009-07-07/2009-09-09/2009-12-17444机器人2010年5月难度很大,被Sitti教授[6]称为“是对微型机器人研究的极限挑战”、“是微型机器人研究的最后冲刺”.相关研究在国内外都还处于空白或刚刚起步阶段.其研究在微小型机器人系统集成、水面拖动、特殊运动模式系统的运动分析和动力学建模与控制系统设计,以及超疏水材料的制备与应用等方面,具有重要的研究意义.2水上行走机器人研究现状分析(Analysis on the state of arts of water strider robot)2.1原型系统目前已研制成功的水上行走机器人原型系统为数不多.其中最早见诸文献的是美国麻省理工大学的“Water Strider”机器人[7].如图1(a)所示,它有6条腿,均由Φ0.2mm规格的不锈钢丝制成,骨架为铝质结构.中间两条腿为驱动腿,以橡皮筋驱动,拧紧一次皮筋只能划水5次,向前滑行20cm左右.虽然它结构简陋,运动能力有限,但它是全世界第一个能够在水面站立和移动的机器人,因而备受关注.其相关理论研究和实验结果在Nature上发表时,还配发了评论文章[8].随后卡耐基—梅隆大学Sitti教授带领的小组在2004年9月制作成功了名为Water Walker的水上行走机器人[9],如图1(b)所示.该机器人主身躯为一个边长0.5in的四方状碳化纤维盒,8条2in长、涂有防水塑料的钢丝构成腿部.利用3片金属压电制动器构成驱动器,总质量为1g 左右.该机器人没有自带能源和控制器,必须通过导线与地面电源和控制卡相连,还不能算是真正意义上的水上行走机器人.而且Water Walker的运动能力也非常有限,移动缓慢,无法转向.清华大学吴立成等人[10]于2005年设计制作了如图1(c)所示的水上行走机器人“Water Dancer”,采用小电机驱动,三级齿轮减速增扭,钮扣电池提供能量.“Water Dancer”无缆、运动速度良好,虽然尚没有调速和转向能力,性能明显优于前两者(见表1).此外,日本学者研制了形状记忆合金(SMA)驱动的有缆机器人[11],用于对水蜘蛛腿部肌肉群进行模拟.文[12]为研究两个驱动器配合生成椭圆轨迹的腿部机构,研制了使用浮筒作为支撑腿的原型机器人,由于使用浮力而不是表面张力支撑,不是真正意义上的水上行走机器人.哥伦比亚大学也研制了利用电机驱动的水上行走机器人[13],机器人本体是由碳纤维制成,4条支撑腿由铝制成,该机器人结构简单,划水效率较低,负载能力差.2007年,卡耐基—梅隆大学的研究组提出了新的电机驱动水上行走机器人原型[14].为提高支撑能力,机器人由12条支撑腿、2个电机驱动,但只能通过开关设置工作于直行或纯转弯模式,无法控制其运动.文[15]提出了一个电机驱动的6腿水上漂浮机器人,其驱动腿采用曲柄滑块机构,可输出与生物体类似的椭圆运(a)Water Strider(b)Water Walker(c)Water Dancer图1水上行走机器人原型系统Fig.1Prototypes of water strider robot表1现有原型系统参数表Tab.1Parameters of the prototypesWater Dancer(清华)Water Walker(CMU)Water Strider(MIT)驱动方式电机压电驱动橡皮筋系统结构无缆有缆无缆持续工作时间>10h5~8s腿部表面处理纳米材料防水塑料蜡自重 1.8~2g≈1g0.35g第32卷第3期吴立成等:水上行走机器人445(a)实物照片(b)侧视图图2水上行走机器人Water Dancer IIFig.2Water Dancer II动.本课题组近期研制成功了一款名为Water Dancer II的水上行走机器人[16],如图2所示.该机器人采用双电机驱动,能转向和调速,采用红外信号实现了遥控水上行走.2.2相关理论和关键技术生物水黾利用表面张力,仅用单腿就能在水面上支撑起其身体15倍的重量,以前一直无法在理论上解释这一现象.2004年中国学者在Nature上发表文章指出[17],水黾腿部表面附有数千根按同一方向排列的刚毛.这些刚毛表面形成微—纳二级结构(螺旋形沟槽),使其腿能够排开300倍于身体体积的水量而不刺破水面,产生极大的表面张力.人造材料要完全模拟生物表面微—纳结构非常困难,但通过疏水性材料增加表面张力、提高腿部的支撑能力却很容易.MIT、卡耐基—梅隆和本课题组的机器人分别在腿部钢丝表面喷涂了石蜡、防水塑料和纳米疏水剂,达到了提高支撑能力的目的.许多文献研究了超疏水性纳米材料的机理和制备方法[18],实验材料表面对水的接触角达到了171±0.5◦.具有超强疏水性的一些涂料产品也已问世[19].文[15]还提出了利用高分子材料为机器人模拟制造超疏水性绒毛腿部的方法,实验结果显示可以大大提高机器人腿的支撑能力.水上行走机器人能够在水面上站立和行走主要依靠表面张力,详细分析腿部的受力情况对机器人的设计非常必要.表面张力的大小反映表面自动收缩的趋势大小,对于平衡表面可以根据比表面自由能来计算[20].因此估算机器人可产生的水体表面积增量,可以计算腿部最大支撑力.课题组制作了多个如图3所示的无动力机架,每个机架有4条对称的腿.腿部材料为Φ0.2mm不锈钢丝,并使用北京首创纳米科技有限公司研制的SS-1型水性纳米疏水剂增强表面疏水性.当腿部形状和尺寸如图4所示时,不考虑表面疏水材料的影响,计算所得最大支撑力为2.939g.而实验测得,腿部涂敷疏水材料之后,机器人最大静止载重为4g,可见使用疏水性材料可以大大提高腿部的表面张力.文[18-21]也对腿部的形状和长度与支撑能力的关系,以及支撑力的估算等问题,进行了重点研究,给出了支撑力与接触角关系曲线仿真结果,但没有计算支撑力大小.文[15]给出了计算支撑力大小的实验结果,理论计算依然比较简单.目前看来,机器人腿部的支撑能力依然很小,水上行走机器人要提高性能,比如增加传感器等负载,必须进一步提高支撑能力才行.而要较大地提高支撑力,显然应朝着模拟生物腿部绒毛结构的方向努力.图3支撑腿结构示意图Fig.3Structure of the supportinglegs图4支撑腿零件图Fig.4Blue print of the supporting legs在水面生物驱动能力的机理研究中,长期以来一直认为生物水蜘蛛(学名水黾)是依靠腿部在水面上划动产生的表面张力波来驱动的[23-24],但该理论无法解释水黾幼虫的水面运动,这称为Denny悖论.2003年Hu等[7]的研究指出,水黾靠腿部划动水面时形成半球形的涡旋产生驱动力,而水面张力波对推力的贡献非常小.对半球形涡旋的分析表明它完全符合蜗丝结构理论,解决了Denny悖论[8].446机器人2010年5月这无疑给水上行走机器人驱动机构设计及机理的研究打下了坚实的基础.但对于水上行走机器人而言,如何建立涡旋驱动的数学模型(划动运动与驱动力之间的动力学关系),如何设计腿部结构和形状以提高驱动效率,如何设计和制造微型、轻质的运动机构,以及如何实现运动控制等问题,都还有待进一步研究.在精密机器人的制造技术方面,目前采用微机电系统(MEMS)技术、传统的精密加工技术或两者相结合,已可实现只有几克重的多种形态微小机器人.比如,用手表电机和微小齿轮减速传动的微小移动机器人Monsieur[25],能够根据两个光电传感器接收到的光强差,调整车轮速度,沿着光线方向移动,重量仅为4.3g.日本Denso公司等单位研究的用压电陶瓷驱动的微小管道机器人[26],用微波进行能量供应,重量仅为0.3g.除了微电机驱动,微小机器人主要可采用的驱动方式还有:静电驱动、热力驱动、压电驱动、水/气压驱动等.但各种驱动器在功率与重量和体积之间总是难以平衡,因此MIT 的Water Strider只是采用了一根橡皮筋进行简单的驱动.微小机器人研究中,机载控制器也是一项难点技术,也是限制其实际应用的主要障碍,有待计算机和外设集成技术的突破.目前问世的微小机器人多数是有缆的,通过缆线连接控制器来解决问题.能源供应有时也采用有缆方式,比如卡耐基—梅隆的Water Walker.但有缆机器人的导线不仅存在电压降和信号衰减,还限制了机器人的移动距离和移动路径.微波供能和信号传输等方法技术还不成熟,而且只适用于特定的环境[27].水上行走机器人的驱动器必须能精确地控制腿部运动,以保证腿部能有效地划动水面,同时又不刺破水面.因此微系统集成也是水上行走机器人研制的关键之一,即在微小尺寸和微小重量水平上集成驱动器、控制器、能源甚至传感器.3下一步研究重点与展望(Key directions and prospects on future research)如前所述,目前MIT、卡耐基—梅隆、本课题组制作的和其他文献中介绍的水上行走机器人都还非常简陋.要制作具有良好运动和控制性能的水上行走机器人还需要在表面张力支撑、涡旋驱动、系统集成、动力学建模与分析、控制方法等各项理论和技术上有所突破.本文对下一步研究重点及展望的分析如下:(1)微小化及轻量化系统集成技术大家都知道水的表面张力是很小的,自然界的水体因为含有杂质和表面污垢等原因,实际表面张力比纯水还要低.利用表面张力在水面活动的自然生物或机器人还必须留有足够的载重余量以抵御空气及水体流动带来的扰动,一旦重量太大,就很容易落水.这可能也是自然界不存在大型水黾的原因.因此,水上行走机器人必须尽可能地微小化和轻量化.真正意义上的水上行走机器人必须是一个无缆系统,即应自备完整的能源、动力和控制系统以及传感器和通讯设备等.如何在微小尺寸和微小重量水平上集成驱动器、控制器、能源和传感器,就成了研制水上行走机器人的一个重点.如上节所述,目前在微小型机器人的制造技术方面已取得大量成果.一种水上行走机器人的系统方案可以是:采用表用电机或其他微小电机驱动,多级齿轮或曲柄滑块机构传动.氧化银电池为能源.两条驱动腿独立驱动,差动转弯.使用光敏电阻调节电机的输入电压,实现电机的调速.通过遥控器控制发光二极管的光强,改变环境光场,最终实现机器人的运动控制.其中氧化银电池为能源,微小电机和多级齿轮减速构成驱动系统,环境光场引导机器人运动方向等各项技术,都有成功的先例.因此借鉴和发展现有技术,未来将可研制出能在野外执行侦察勘测、水质监控或液面清污等任务的水上行走机器人.(2)超疏水腿部材料技术水上行走机器人为避免粘性阻力和仿生水黾,必须采用丝状腿部接触水面.机器人的支撑力主要来自水的表面张力.腿部材料的亲水或憎水(即疏水)性能对于能获得多大表面张力非常关键.在相同结构与尺寸的情况下,腿部材料与水的接触角越大,能够获得的最大表面张力也越大.已有一些涂料和工艺能够在墙体和金属等材料的表面产生接触角接近180◦的超疏水效果.但水上行走机器人的丝状腿部还应具有一定的强度和刚度.因为腿部支撑力大小直接决定了机器人自重大小和负载能力,目前情况是支撑力提高1g,对于水上行走机器人总体设计都有非常大的帮助.所以采用何种材料和工艺来制作既满足强度和刚度要求,又具有超疏水表面性能的机器人丝状腿部,是一个值得研究的重点问题.文[16]指出生物水黾之所以能产生极大的表面张力(300倍于身体体积的水的重量),是因为腿部表面附有数千根按同一方向排列的刚毛,同时刚毛表面形成了特殊的微—纳二级结构.研究通过光刻、腐蚀和表面生长等方法,使材料表面出现类似第32卷第3期吴立成等:水上行走机器人447水黾腿部的表面结构,是研制腿部材料的一种重要思路.(3)支撑力分析与腿部优化设计水上行走机器人在水面活动,其支撑力来自丝状腿部在水面的表面张力和浮力,其中浮力非常小,主要是表面张力.表面张力和浮力的分析与计算对于水面行走机器人支撑腿的设计以及载重能力分析具有指导意义.这方面的研究可以根据Young-Laplace方程来展开.机器人丝状腿部在水面的受力情况类似于受到分布力作用的悬臂梁,必然会产生较大形变(因为细丝状形状决定了腿部的刚度较小).根据腿部的受力和形变,优化设计腿部形状和结构,使得腿部形变之后能在水面充分利用表面张力(比如与水面接触部分呈直线),也是一个研究重点.(4)动力学分析在复杂系统的动力学建模与分析方面,目前一般可采用ANSYS或ADAMS等动力学分析软件对微机器人进行有限元分析[28],或采用拉格朗日方法等建立机器人系统动力学方程.虽然文[7]解决了Denny悖论,并给出了腿部划动速度和驱动力之间的关系式,但水上行走机器人水面摩擦力分析、驱动腿划水的涡旋驱动数学模型以及腿部与水面碰撞过程的分析与计算等仍是动力学建模的一大难点.动力学仿真中如何有效地模拟液面效果也是一项值得研究的技术.(5)控制算法一方面受到自重和体积的限制,水上行走机器人驱动、传感和控制系统都将非常简陋.另一方面,机器人本身包含柔性部件(主要是腿部),在水面的运动和受力也非常复杂,难以建立精确的数学模型.工作环境开放、动态,变化因素较多.未来的工作任务还要求它具有一定的自主能力.如何设计有效的控制算法,满足其在野外执行侦察勘测、水质监控或液面清污等任务的需要,也是一个研究重点.(6)仿真和实验研究建立水上行走机器人仿真系统,对机器人重量、体积、受力(支撑力、摩擦力)和运动响应等情况进行仿真,甚至通过三维动画演示机器人运动过程,对于机器人的分析与设计显然具有重要意义.对机器人样机的实验研究,不仅包括测定其速度、转弯半径、续航时间、遥控距离等各项性能参数.还包括设计特定实验,辨识表面张力值、水面摩擦系数以及机体转动惯量等参数,并完成遥控越障及快速到达等多种科目的综合实验.4结论(Conclusion)水上行走机器人不同于地上、地下、水下、空中和管道等各种机器人,是国际上近期才开始研究的一个热点问题.由于利用表面张力在水面活动,不浸润水体,因此它可以避免受到液体粘性阻力的影响.并且其活动区域对水深几乎没有要求.相比于舰船和水下潜器具有独特的优势.通过加装摄像头、气体或化学等各类传感器,水上行走机器人将在侦察勘测、水质监控、液面清污等领域具有十分重要的应用前景.水上行走机器人的独特运动模式要求它只能有很小的自重和体积,因此研制难度也很大.在微小型机器人系统集成、水面拖动、特殊运动模式系统的运动分析和动力学建模与控制系统设计,以及超疏水材料的制备与应用、固液气表面物理化学等方面具有重要的理论研究意义,相关理论和关键技术的研究将大大推动微机器人、仿生机器人等学科领域的发展.参考文献(References)[1]马光.仿生机器人的研究进展[J].机器人,2001,23(5):463-466.Ma Guang.Research evolution on biorobotics[J].Robot,2001,23(5):463-466.[2]Arikawa K,Hirose S.Development of quadruped walking robotTITAN-VIII[C]//IEEE/RSJ International Conference on Intelli-gent Robots and Systems.Piscataway,NJ,USA:IEEE,1996:208-214.[3]Hirose S,Kato K.Study on quadruped walking robot in Tokyoinstitute of technology–Past,present and future[C]//IEEEInternational Conference on Robotics and Automation.Piscat-away,NJ,USA:IEEE,2000:414-419.[4]杨少波,韩小云,张代兵,等.一种新型的胸鳍摆动模式推进机器鱼设计与实现[J].机器人,2008,30(6):508-515.Yang Shaobo,Han Xiaoyun,Zhang Daibing,et al.Design anddevelopment of a new kind of pectoral oscillation propulsionrobotfish[J].Robot,2008,30(6):508-515.[5]Idogaki T,Kanayama H,Ohya N,et al.Characteristics of piezo-electric locomotive mechanism for an in-pipe micro inspectionmachine[C]//IEEE International Symposium on Micro Machineand Human Science.Piscataway,NJ,USA:IEEE,1995:193-198.[6].Engineer Builds Robot That Walks on Wa-ter[EB/OL].(2004-09-09)[2009-07-07].http://www-math.mit.edu/∼dhu/Press/Press03/forbes.htm.[7]Hu D L,Chan B,Bush J W M.The hydrodynamics of waterstrider locomotion[J].Nature,2003,424(6949):663-666.[8]Dickinson M.Animal locomotion:How to walk on water[J].Nature,2003,424(6949):621-622.[9]Suhr S H,Song Y S,Lee S J,et al.Biologically inspired minia-ture water strider robot[C]//Proceedings of the Robotics:Sci-ence and Systems I.Boston,USA:2005:319-325.[10]吴立成,丁樑,郭栋,等.水上漂浮仿生水黾机器人,中国:200610112601.7[P].2006-08-25.448机器人2010年5月Wu Licheng,Ding Liang,Guo Dong,et al.A bionic water strider robot,China:200610112601.7[P].2006-08-25.[11]Takonobu H,Kodaira K,Takeda H.Water strider’s musclearrangement-based robot[C]//IEEE/RSJ International Confer-ence on Intelligent Robots and Systems.Piscataway,NJ,USA: IEEE,2005:1754-1759.[12]Gao T H,Cao J Y,Zhu D Y,et al.Study on kinematics analy-sis and mechanism realization of a novel robot walking on water surface[C]//IEEE International Conference on Integration Tech-nology.Piscataway,NJ,USA:IEEE,2007:685-690.[13]Basso B,Fong A,Hurst A,et al.Robot using surface tension[D].Columbia,USA:Columbia University,2005.[14]Song Y S,Sitti M.STRIDE:A highly maneuverable and non-tethered water strider robot[C]//IEEE International Conference on Robotics and Automation.Piscataway,NJ,USA:IEEE, 2007:980-984.[15]Suzuki K,Takanobu H,Noya K,et al.Water strider robots withmicrofabricated hydrophobic legs[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway,NJ, USA:IEEE,2007:590-595.[16]Gao X F,Jiang L.Water repellent legs of water striders[J].Na-ture,2004,432(7013):36.[17]王庆军,陈庆民.超疏水膜表面构造及构造控制研究进展[J].高分子通报,2005(2):63-69,92.Wang Qingjun,Chen Qingmin.Recent developments of the morphology and its control of super hydrophobic membrane[J].Polymer Bulletin,2005(2):63-69,92.[18]北京首创纳米科技有限公司.水性纳米疏水剂:SS—I型和SS—II型[EB/OL].(2005-06-30)[2009-07-06].http://www./cpin/ss.htm.[19]Adamson A W.表面的物理化学[M].顾惕人,译.北京:科学出版社,1984.Adamson A W.Physical chemistry of surfaces[M].Gu Tiren, trans.Beijing:Science Press,1984.[20]Song Y,Sitti M.Surface-tension-driven biologically inspiredwater strider robots:Theory and experiments[J].IEEE Trans-actions on Robotics,2007,23(3):578-589.[21]Song Y S,Suhr S H,Sitti M.Modeling of the supporting legsfor designing biomimetic water strider robots[C]//IEEE Inter-national Conference on Robotics and Automation.Piscataway,NJ,USA:IEEE,2006:2303-2310.[22]Keller J B.Surface tension force on a partly submerged body[J].Physics of Fluids,1998,10(11):3009-3010.[23]Suter,R B,Rosenberg O,Loeb S,et al.Locomotion on thewater surface:Propulsive mechanisms of thefisher spiderDolomedes triton[J].Journal of Experimental Biology,1997,200(19):2523-2538.[24]Miyazawa O.A self-contained micromechanism[C]//1stIFToMM International Symposium.1993:187-192.[25]Kawakita S,Isogai T,Ohya N,et al.Multi-layered piezo-electric bimorph actuator[C]//International Symposium on Mi-cromechatronics and Human Science.Piscataway,NJ,USA:IEEE,1997:73-78.[26]Shibata T,Sasaya T,Kawahara N,et al.Microwave energy sup-ply system for in-pipe micromachine[C]//International Sympo-sium on Micromechatronics and Human Science.Piscataway,NJ,USA:IEEE,1998:237-242.[27]刘品宽,孙立宁,刘涛,等.惯性冲击式运动原理的理论分析与仿真[J].中国机械工程,2004,15(24):2217-2221.Liu Pinkuan,Sun Lining,Liu Tao,et al.Theoretical analysisand simulation on the principle of inertia drive mechanism[J].China Mechanical Engineering,2004,15(24):2217-2221.作者简介:吴立成(1972–),男,博士,副教授.研究领域:机器人,计算机应用.孙富春(1964–),男,博士,教授.研究领域:智能控制及机器人,智能信息处理,网络控制等.袁海斌(1971–),男,博士,副教授.研究领域:网络化信息处理与智能诊断,计算机应用.水上行走机器人作者:吴立成, 孙富春, 袁海斌, WU Licheng, SUN Fuchun, YUAN Haibin作者单位:吴立成,WU Licheng(中央民族大学信息工程学院,北京,100081), 孙富春,SUN Fuchun(清华大学计算机科学与技术系智能技术与系统国家重点实验室,北京,100084), 袁海斌,YUAN Haibin(北京航空航天大学自动化科学与电气工程学院,北京,100191)刊名:机器人英文刊名:ROBOT年,卷(期):2010,32(3)1.Dickinson M Animal locomotion:How to walk on water[外文期刊] 2003(6949)2.Hu D L;Chan B;Bush J W M The hydrodynamics of water strider locomotion[外文期刊] 2003(6949) Engineer Builds Robot That Walks on Water 20094.Gao X F;Jiang L Water repellent legs of water striders[外文期刊] 2004(7013)5.Suzuki K;Takanobu H;Noya K Water strider robots with microfabricated hydrophobic legs 20076.Song Y S;Sitti M STRIDE:A highly maneuverable and non tethered water strider robot 20077.Suhr S H;Song Y S;Lee S J Biologically inspired miniature water strider robot 20058.Idogaki T;Kanayama H;Ohya N Characteristics of piezoelectric locomotive mechanism for an in-pipe micro inspection machine 19959.杨少波;韩小云;张代兵一种新型的胸鳍摆动模式推进机器鱼设计与实现[期刊论文]-机器人 2008(06)10.Hirose S;Kato K Study on quadruped walking robot in Tokyo institute of technology-Past,present and furore 200011.Arikawa K;Hirose S Development of quadruped walking robot TITAN-Ⅷ 199612.刘品宽;孙立宁;刘涛惯性冲击式运动原理的理论分析与仿真[期刊论文]-中国机械工程 2004(24)13.Shibata T;Sasaya T;Kawahara N Microwave energy sup ply system for in-pipe micrornachine 199814.Kawakita S;Isogai T;Ohya N Multi-layered piezo electric bimorph actuator 199715.Miyazawa O A self-contained micromechanism 199316.Snter R B;Rosenberg O;Loeb S Lecomotion on the water surface:Propulsive mechanisms of the fisher spider Dolomedes triton 1997(19)17.Keller J B Surface tension force on a partly submerged body[外文期刊] 1998(11)18.Song Y S;Suhr S H;Sitti M Modeling of the supporting legs for designing biomimetic water strider robots 200619.Song Y;Sitti M Surface-tension-driven biologically inspired water strider robots:Theory and experiments[外文期刊] 2007(03)20.Adamson A W;顾惕人表面的物理化学 198421.北京首创纳米科技有限公司水性纳米疏水剂:SS-Ⅰ型和SS-Ⅱ型 200922.王庆军;陈庆民超疏水膜表面构造及构造控制研究进展[期刊论文]-高分子通报 2005(02)23.Basso B;Fong A;Hurst A Robot using surface tension 200524.Gao T H;Cao J Y;Zhu D Y Study on kinematics analy sis and mechanism realization of a novel robot walking on water surface 200725.Takonobu H;Kodaira K;Takeda H Water strider's muscle arrangement-based robot 200526.吴立成;丁樑;郭栋水一卜漂浮仿生水黾机器人 200627.马光仿生机器人的研究进展[期刊论文]-机器人 2001(05)本文链接:/Periodical_jqr201003023.aspx。
水上行走机器人腿部静力学分析概要
2010年10月第36卷第10期北京航空航天大学学报Journal of Beijing University of Aeronautics and AstronauticsOctober2010Vol.36No.10收稿日期:2009⁃08⁃27基金项目:国家自然科学基金资助项目(60875062作者简介:王淑慧(1983-,女,河南卫辉人,博士生,ellenwong@.水上行走机器人腿部静力学分析王淑慧(北京航空航天大学自动化科学与电气工程学院,北京100191吴立成(中央民族大学信息工程学院,北京100081摘要:水上行走机器人仿生水黾,利用腿部产生的表面张力在液体表面站立和行走.通过静力学分析可计算机器人载重能力,并给出腿部形状设计准则.建立了水上行走机器人支撑腿的静力学模型,分析了表面张力最大值条件即水面打破条件,提出了腿部支撑力及其最大允许入水深度的计算方法.采用该方法,使用Matlab 计算得到了几种不同材料的表面张力与接触角关系曲线,计算了几种材料支撑腿的支撑力及其允许入水深度的最大值,并通过与实验数据相比较,验证了计算方法和结果的正确性.关键词:水上行走机器人;表面张力;静力学中图分类号:TP 242文献标识码:A文章编号:1001⁃5965(201010⁃1176⁃04Statics analysis on the leg of water strider robotWang Shuhui (School of Automation Science and Electrical Engineering,Beijing University of Aeronautics and Astronautics,Beijing 100191,ChinaWu Licheng(College of Information Engineering,Central University for Nationalities,Beijing 100081,ChinaAbstract :As a bionic robot of the water strider,water strider robot stays afloat and stride on water sur⁃face relies on surface tension provided by the legs.Statics analysis could be used to calculate the robot’s load capacity and then to define the criterions for designing the supporting leg.A static model of the supporting leg was built first and thesurface⁃breaking condition,namely the condition for getting maximum surface tension,was analyzed.Then the methods for calculating the supporting force and the maximum allowed depth that the leg pushes the water were proposedrespectively.Utilizing the proposed model and methods,the curves be⁃tween surface tension and contact angle of several kinds of materials were figured by using of the Matlab pro⁃gram.The supporting force and the maximum allowed depth of the leg with several kinds of materials were cal⁃culated.The validity of the proposed models and methods were verified by comparing the calculation with some experimental values.Key words :water strider robot;surface tension;statics文献[1]最早介绍了Water Strider 机器人有6条腿,均由Φ0.2mm 规格的不锈钢丝制成,其结构简陋,运动能力有限,但作为全世界第1个能够在水面站立和移动的机器人备受关注,其相关理论研究和实验结果在‘Nature“上发表并配发了评论文章[2].文献[3]Water Walker 机器人腿部由8条2英寸长涂有防水塑料的钢丝构成.文献[4]提出新的电机驱动水面漂浮机器人原型,为提高支撑能力,有12条支撑腿.文献[5]Water Dancer 和本文的Water DancerⅡ,腿部均由Φ0.2mm 规格的不锈钢丝制成,其中Water DancerⅡ采用双电机驱动,自带能源和控制器,可通过红外信号实现遥控转向和调速.水上行走机器人主要依靠表面张力在水面上站立和行走,详细分析腿部的受力情况对机器人的设计非常必要.建立水上行走机器人腿部的静态模型,分析计算腿部支撑力大小以及支撑力与接触角关系曲线,对于机器人支撑腿设计以及载重能力分析至关重要.文献[6]只给出了支撑力与接触角关系曲线仿真结果,没有计算支撑力大小.文献[7]只给出计算支撑力大小的实验结果,缺乏必要的理论计算,设计所需要的计算方法和数据都没有阐述.本文建立了水上行走机器人支撑腿的数学模型,根据Young⁃Laplace方程建立了接触面的控制方程,分析了表面张力最大值条件即水面打破条件.提出了腿部支撑力及其最大允许入水深度的计算方法,并进行了仿真分析.1支撑腿的数学模型为分析计算机器人支撑腿与水面接触产生的表面张力,计算机器人的支撑力大小,建立了支撑腿及其与水面接触情况的数学模型.1.1问题描述水上行走机器人为仿生水黾,其支撑腿一般为不锈钢或碳纤维材料的圆截面细丝,与水面接触部分呈直线形状.因此假设支撑腿是刚性的细长圆柱体,与水的接触角θc,不失一般性取单位长度进行分析.支撑腿与水面接触,并将水面下压一定深度,圆柱体中心轴保持水平,由于腿的长度远大于腿的截面直径,可假设圆柱体两端没有复杂的边缘效应,则可以简化为二维求解,如图1.z=0 水面;S1 z=0以下,物体与水接触面之上的面积;S2 z=0以下,空气与水接触面之上的面积;x0 三相接触点的横坐标;z0 腿部从水面下降的深度;r 圆柱体半径;R1 接触面某点的曲率半径;θ 接触面某点的倾斜角;θ0 三相接触点的θ值;ϕ物体下降角度;γ 水的表面张力;p 静态水压.图1支撑腿模型示意图物体置于液面且未打破液面时,同时受到液体的表面张力和浮力的作用[8].令F b和F s分别为浮力和表面张力产生的支撑力,则物体获得的支撑力为F=F b+F s(1 F b可以由积分得到,即p在圆柱体和水的接触面上的积分.F s 为γ的垂直分量,可简称为表面张力支撑力.文献[8]证明了F b和F s分别等于z= 0以下,物体和空气与水的接触面以上部分水的重量,也就是说,F b和F s分别与S1和S2成正比,即F b=∫ϕ0p cosϕ㊃r dϕ=ρgS1=ρg(-2z0r sinϕ+r2ϕ-r2sinϕcosϕ(2F s=2γsinθ0=ρgS2(3式中,ρ为水的密度;g为重力加速度.由Young⁃Laplace方程[9],空气和水的接触面上的某一点处p可表示为p=γ(1/R1+1/R2(4式中,R2为接触面在该点处的曲率半径.由于腿部与水面接触部分的长度远大于腿的截面直径,腿是直的圆柱体,可知R2=∞,则式(4可以简化为ρgh(x=-γ1R1=-γd2d x2h(x1+d d x h(x([]232(5式中,z=h(x为空气和水接触面的曲线方程,由于z<0,方程中出现 -”号,其边界条件为d hd x x=x0=tanθ0(6h(∞=0(7式中,x0为水㊁空气和圆柱体的三相交界点的x坐标值,因此有如下关系:x0=r sinϕ(8ϕ=π+θ0-θc(9式中,θc为腿部材料与水的接触角.若已知ϕ值,则由式(8和式(9求出x0和θ0,可由式(3得到F s.再由式(5~式(7解出h(x,求出z0=h(x0,由式(2可得F b.因此给定ϕ值,即可计算出F.下文通过对水面打破条件的分析,讨论ϕ值的计算问题.1.2最大表面张力支撑力由图1可见,当腿部压入水面越来越深,即圆柱体沿z方向不断下降时,固液气三相交界点沿着腿部表面不断上移.当腿部两边的固液气三相交界点相遇在腿部顶端(即ϕ=180°时,两边液面相遇,腿部被水淹没,即水面被打破.随着腿部压入水面越深,腿部作用于液体表面的压力越大.当这一压力达到极限,即支撑力取得最大值时,即使腿部两边的液面还未相遇,水面也可能被直接刺破,此时ϕ达到某个临界值.水面打破时ϕ的取值与θc有关,可如图2进行分析.随着支撑腿从平静水面压入深度的增加,θ07711第10期王淑慧等:水上行走机器人腿部静力学分析从零不断增大,ϕ角亦然.对于θc <90°的材料如图2a 所示,当θ0=θc 时,由式(9知ϕ=180°,物体两边液面相遇,水面处于打破前极限状态.θc =90°的材料如图2b 所示,当θ0=θc =90°时,由式(9可知ϕ=180°,物体两边液面相遇,水面处于打破前极限状态.而θc >90°的材料,当θ0=90°时,由式(3可知表面张力支撑力取得最大值,由式(9可知此时ϕ=270°-θc .由于水上行走机器人的腿部为细丝,自身重量和浮力都很小,支撑力主要就是表面张力支撑力[10].因此认为此时F 也取得最大值,水面处于打破前的极限状态.aθc <90°bθc =90°cθc >90°图2水面打破前极限位置示意图根据上述对水面打破条件的分析,可以定义水面打破时的ϕ值为ϕmax =180°θc <90°270°-θcθc ≥{90°(10即ϕ可以在0到ϕmax 之间取值.代入式(9可知,对于θc <90°的材料,θ0只能在0到θc 之间取值.而对于θc ≥90°的材料,可以有θ0=90°.由式(3可求得支撑腿能获得的最大表面张力支撑力为 F s,max =2γsin θc θc <90°,θ0=θc2γθc ≥90°,θ0={90°(11根据式(11,若已知腿部材料和长度,即可计算出机器人能获得的F s,max .因此该式可用于机器人支撑能力的估算,并作为支撑腿材料和长度等参数的设计依据.该式也说明,对于θc ≥90°的材料,单位长度能获得的F s,max 均为2γ,与θc 的具体值无关.水上行走机器人为仿生水黾,减少水面运动阻力,要求驱动腿在划水时也不能打破水面.为设计驱动腿,还需要分析计算驱动腿不打破水面的最大吃水深度.2界面方程及最大入水深度求解理论上对式(5积分即可求得方程z =h (x .但为求解方便,本文根据其反函数形式x =f (z 来求解,即由式(5有ρgz =-γ1R 1=-γd 2d z 2f (z 1+dd zf (z []{}232(12对式(12从0到z 积分,可以得到ρgz22γ=1-d f (z d z1+d f (zd (z2=1-cos θ(13定义a =2γ/ρg ,则有z =-a 1-cos θ(14在固液气三相交界点处即为z 0=-a 1-cos θ0(15化简式(13可得d f (z d z =z 2-a 2z 2a 2-z 2,再积分一次即可求得空气和水接触面的曲线方程为x =a 2arcosh 2a æèçöø÷-z -2a 2-z 2+c (16式中,c 为积分常数.利用边界条件式(8和式(15,可解得c 为c =r sin ϕ-a 2arcosh 2a -z æèçöø÷0+2a1-z 202a2(17将式(9代入式(15可得腿部压入水面的深度z 0和ϕ之间的关系式为z 0=-a 1-cos(ϕ+θc -π(18因此给定z 0或已知ϕ,即可由式(16~式(18求得气液界面方程,并可由式(2求得F b .由式(10可知ϕ的取值范围为[0,ϕmax ],因此腿部不打破水面的最大入水深度可由式(18求得为z 0,max =-a 1-cos θc θc <90°-aθc ≥{90°(19式(19进一步说明:对于θc ≥90°的材料,z 0,max 也与θc 的具体值无关.3仿真计算与分析本文仿真均取水在常温20℃时的参数:γ=0.072N /m,g =9.81m /s 2,ρ=9.98×102kg /m 3.设腿部为直径0.2mm 的无限长圆截面直线形状.3.1气液界面求解仿真针对不同接触角的材料,计算得到水面即将打破,即ϕ接近ϕmax 时的气液界面曲线如图3.由图3可知,对于θc >90°的材料,水面打破前空气8711北京航空航天大学学报2010年与水之间的接触面几乎是一样的.仿真验证了本文气液界面方程求解方法及相关分析的有效性.图3不同材料在即将打破水面时的气液界面曲线3.2支撑力与允许入水深度计算若机器人支撑腿采用直径D 为0.2mm 的不锈钢丝,不具有疏水性,θc 约为60°.为增加F s ,可通过喷漆㊁涂蜡等方法使其成为θc 超过90°的防水钢丝.分别对这两种腿部材料计算,各参数值如表1(L 为腿长度.仿真表明采用本文模型和算法,可估算机器人支撑力和腿部最大允许入水深度等参数,作为机器人设计的依据.由表1的计算结果可见,水上行走机器人采用疏水性材料制作腿部,将可以大大提高支撑能力和驱动腿的允许吃水深度.表1水上行走机器人钢丝腿部支撑力(L =10mm腿部材料θc /(°D /mmz 0,max /mmF s /(m㊃NF b /(m㊃NF /(m㊃N不锈钢丝600.2-2.70 1.180.09 1.27防水钢丝≈1200.2-3.86 1.440.041.48以文献[6]采用的具有良好疏水性的Teflon 材料为例,θc 为112°,D 为0.33mm .F s 越过最大值(θ0>90°时,计算结果见表2.由表2可见,若腿部在取得F s,max 之后继续增加入水深度,F s ,F b 和F 都不增反降.这意味着腿部将因支撑力小于载荷而打破水面下沉,验证了1.2节的假设.表2Teflon 材料支撑腿ϕ>ϕmax 时的支撑力(L =10mmθc /(°ϕ/(°F s /(m㊃NF b /(m㊃NF /(m㊃Nz 0/mm 901581.440.061.53.8690.1158.1 1.43990.0562 1.496 3.86792160 1.4390.053 1.492 3.995本文Walk DancerⅡ机器人如图4所示.图4Walk DancerⅡ机器人机器人设计为10条7cm 长不锈钢丝支撑腿,由表1数据可计算得F 约为70m㊃N,则有效载荷约为7g .实验中机器人站立和行走状况良好,可见本文计算方法和计算结果的正确性.4结论本文根据Young⁃Laplace 方程对水上行走机器人进行了静力学分析,建立了腿部与水的接触面控制方程,分析了表面张力最大值条件即水面打破条件,提出了腿部支撑力及其最大允许入水深度的计算方法.使用Matlab 编程仿真计算了几种不同材料的表面张力与接触角关系曲线,并对水面打破条件进行了数值验证.计算了几种材料支撑腿的支撑力及其允许入水深度的最大值,并通过与实验数据相比较,验证了本文计算方法和结果的正确性.本文方法和结果可用于指导水上行走机器人腿部设计.参考文献(References[1]Hu D L,Chan B,Bush J W M.The hydrodynamics of water striderlocomotion[J].Nature,2003,424(7:663-666[2]Dickson M.How to walk on water[J].Nature,2003,424(7:621-622[3]Song Y S,Metin S.Surface⁃tension⁃driven biologically inspiredwater strider robot:theory and experiments [J ].IEEE Transactions onRobotics,2007,23(3:578-589[4]Song Y S,Metin S.STRIDE:a highly maneuverable and non⁃tethered water strider robot [C ]//Hutchinson S.2007IEEE Inter Conf on Robotics and Automation.Rome:IEEE,2007:980-984[5]吴立成,丁樑,郭栋,等.水上漂浮仿生水黾机器人:中国,ZL200610112601.7[P].2008⁃07⁃23Wu Licheng,Ding Liang,Guo Dong,et al.A bionic water spider robot moving on the water:China,ZL 200610112601.7[P].2008⁃07⁃23(in Chinese[6]Song Y S,Suhr S H,Metin S.Modeling of the supporting legs fordesigning biomimetic water strider robots[C]//Proc of the 2006IEEE Inter,Conf on Robotics and Automation.Orlando:IEEE,2006:2303-2310[7]Suzuki K,Takanobu H,Noya K,et al.Water strider robots withmicrofabricated hydrophobic legs [C]//Anon.2007IEEE /RSJ Inter Conf on Intelligent Robots and Systems.San Diego:IEEE,2007:590-595[8]Keller J B.Surface tension force on a partly submerged body [J].PhysFluids,1998,10(11:3009-3010[9]Adamson A W,Gast A P.Physical chemistry of surfaces[M].6th Edition.New York:Wiley⁃Interscience,1997[10]Vella D.Floating objects with finite resistance to bending[J].Langmuir,2008,24:8701-8706(编辑:刘登敏9711第10期王淑慧等:水上行走机器人腿部静力学分析。
受水黾启发水上行走机器人控制系统开发
中 图分 类 号 T 2 P4 文献标识码 A
A n r lS se De e o m e tf raW ae — l n Co to y t m v l p n o trwaki g Ro t ns r db a e ti e s bo pie y W t rS rd r I
wae t d r op o u et ewa e v me t T i p p r e e o s mo ec n r l y tm f trwak n o o , a d tr r e r d c t r si t h mo e n . h s a e v l p r d a e t o t se o e- l ig r b t n os wa
Ke y wor r m o ec ntol wa e ti r ob ;w ak o t r ds e t o r ; t rsrde ;r ot l n wa e
水 黾依靠 其腿 表 面特 殊 结构 在 水面 停 留并 能快 速滑 行 或跳 跃 .水 上行 走机 器 人 以其 效率 高 、机动 性 好 、噪音低 、对环 境扰 动小 的优 势将 在军 事侦 察 、环境 监测 、水体检 测 、地 下管 网检测 等军 事和 民用方面 得 到,‘ 、 泛应 用 . 因此 ,开 展水 上行 走 机器 人 的研 究将 具 有 重要 的理 论 意义 和 实 际应 用 价值 .美 国麻省 理工 大
基于仿生原理的水上行走机器人基础技术分析
基于仿生原理的水上行走机器人基础技术分析基于仿生原理的水上行走机器人是一种受到生物形态和行为特点启发的机器人设计。
它模仿水生生物在水中行走和操纵的方式,实现了在水中高效移动和操作的能力。
本文将对基于仿生原理的水上行走机器人的基础技术进行分析,包括机器人结构设计、运动方式、控制算法和感知系统。
首先,机器人结构设计是实现水上行走能力的基础。
仿生水上行走机器人通常采用多脚、多鳍或者撞击式结构。
多脚结构模仿了一些水生生物的多节肢体,通过控制关节运动实现行走。
多鳍结构则模仿了鱼类和鳍足类动物的鳍,通过变换鳍的形状和运动方式实现行走。
撞击式结构使用一对短小而坚硬的臂进行撞击推动,类似于蚂蚁的触角运动。
机器人结构设计的关键是要具备足够的刚度和灵活性,以适应复杂的水动力环境。
其次,运动方式是决定机器人在水中行走能力的关键。
仿生水上行走机器人可以采用步态或者摆动方式进行运动。
步态运动模仿了生物的步态,通过周期性地改变机器人关节或鳍的姿态和相对运动来实现行走。
摆动运动则模仿了生物的摆动运动,通过改变机器人结构其中一部分的形变和运动来实现行走。
步态运动相对较为稳定和节能,但需要较复杂的运动规划和控制;摆动运动相对较简单,但对机器人结构设计和控制算法要求较高。
第三,控制算法是保证机器人稳定行走的核心。
仿生水上行走机器人的控制算法一般采用分层控制策略,将机器人的运动控制分为高级规划、中级控制和低级运动控制三个层次。
高级规划层负责规划机器人整体路径和行走速度;中级控制层负责计算机器人关节或鳍运动的轨迹和相对运动;低级运动控制层负责控制机器人各个关节或鳍的运动。
同时,控制算法还需要根据水动力环境实时调整机器人的运动和姿态,以保持机器人的稳定性和效率。
最后,感知系统是机器人实时获取环境信息和调整行为的基础。
仿生水上行走机器人的感知系统通常包括视觉、声纳和运动传感器。
视觉传感器用于获取水下物体和水面姿态信息;声纳传感器用于测量水下障碍物和水流速度等信息;运动传感器用于测量机器人自身运动和姿态状态。
基于表面张力的仿水黾机器人

将数据与正常水面行驶速度进行对比,分析机器 人的性能。
结果解释
根据数据分析结果,解释机器人在水面上的行驶 性能,以及可能的影响因素。
机器人性能评估与优化建议
评估指标
根据实验数据,评估机器人的性能指标,如速度、稳定性、耐力等。
优化建议
根据评估结果,提出针对性的优化建议,如改进机器人结构、调整表面张力等。
算法优劣
基于机器学习的路径规划算法具有自适应能力强、能够处理复杂环境等优点。但是,该算 法需要大量的训练数据和计算资源,且模型的泛化能力有待提高。
机器人导航实验与结果分析
实验设置
实验结果
为了验证基于机器学习的路径规划算 法的有效性,进行了仿水黾机器人的 导航实验。实验中,机器人需要穿越 不同形状的水面障碍物,并到达目标 地点。同时,水面环境会随机生成波 动和扰动,以模拟真实情况。
发展
随着表面张力的仿水黾机器人研究的深入,未来的发展 将更加注重机器人的智能化、自主性和适应性。通过引 入先进的传感器和控制系统,机器人可以更好地感知周 围环境并进行自主决策,实现更加智能化的运动和控制 。同时,随着材料科学和制造技术的进步,我们可以制 造出更加轻盈、坚固和高效的仿生机器人,进一步提高 其在水面上的运动性能和适应性。
材料选择与制作工艺
材料选择
选用具有高强度、轻质和抗腐蚀性的材料,如碳纤维和特种塑料,以确保机 器人的稳定性和耐用性。
制作工艺
采用精密制造和加工技术,确保机器人结构的精确度和稳定性。此外,还进 行防水和防尘处理,以提高机器人的可靠性和耐用性。
实验与测试方法
模型建立
建立机器人的三维模型,进行模拟测试,以验证设计可行性 和性能指标。
02
基于表面张力的仿水黾机 器人设计
水黾轻功奥秘破解人类水上行走成为可能(组图)
水黾轻功奥秘破解人类水上行走成为可能(组图)能够在水面上自由行走的水黾小型水生昆虫水黾被喻为“池塘中的溜冰者”,因为它不仅能在水面上滑行,而且还会像溜冰运动员一样能在水面上优雅地跳跃和玩耍。
它的高明之处是,既不会划破水面,也不会浸湿自己的腿。
水黾是如何练就如此水上绝技?对此,科学界一直有各种解释。
一种解释是水表面的张力,还有的解释是它们的腿会分泌油脂。
近日,中国科学院化学研究所研究员江雷和博士生高雪峰在11月4日出版的英国《自然》杂志上发表论文,揭开了水黾“水上轻功”的奥秘。
该发现可望在不远的将来设计出新型微型水上交通工具,如无舷船舶。
该发现还可用于新型防水纺织品的生产,甚至人类的水上行走都成为可能。
水黾(mian)是一种在湖水、池塘、水田和湿地中常见的小型水生昆虫,身长大约1厘米,可在水面划行。
它有6条细长的腿,足上有纤毛。
为什么水黾能在水上行走?一般教科书的解释是水表面的张力。
教科书的解释是错误的比如,一分钱的硬币重约一克,比重比水大,可是把它轻轻放在水面上,硬币却能漂浮,这是由于水表面张力的作用。
水滴之所以能变成圆球形,也是由于表面张力作用的缘故。
水的表面有一层膜叫表面层。
它处在气体与液体之间。
液体表面层由于跟空气接触,与液体内部情况有所不同。
表面层里分子的分布要比液体的稀疏些,也就是分子间的距离比液体内部的大一些。
在液体内部,分子间的引力基本上等于斥力;在表面层中,由于分子间的距离比液体内部大,分子间的相互作用表现为引力。
这种液体各部分间相互吸引的力,叫表面张力。
在表面张力的作用下,液体表面有收缩到最小的趋势。
水黾腿的扫描电镜SEM照片(a)水黾腿的无数细长微刚毛(b)单根刚毛上的精细螺旋状的纳米凹槽结构水滴的表面张力有多大呢?可以这样说,比水滴小的虫子,它是不能冲破表面张力而钻入水滴中去的。
水黾属于水生半翅目类昆虫,水黾的种类不同,大小也不一样,一只中等大小的水黾重约30毫克,比水轻,所以,它在水面上行走时,不会沉入水中。
受水黾启发水上行走机器人控制系统开发
受水黾启发水上行走机器人控制系统开发
李蕊;高铁红;杨世忠;薛永红
【期刊名称】《河北工业大学学报》
【年(卷),期】2010(039)005
【摘要】受水黾在水面上能快速滑行或跳跃运动机理的启发,研究一种水上行走机器人.根据功能仿生原理并考虑机器人的负载能力,该机器人前后4腿采用漂浮原理支撑,两中间腿模仿水黾中腿划水功能产生划水动作.进行了水上行走机器人遥控控制系统开发,并在实验室环境下进行机器人运动实验研究.研究水上行走机器人的长远目标是实现机器人独立在远距离水面等环境下自主工作.
【总页数】3页(P57-59)
【作者】李蕊;高铁红;杨世忠;薛永红
【作者单位】河北工业大学,机械工程学院,天津,300130;河北工业大学,机械工程学院,天津,300130;河北工业大学,机械工程学院,天津,300130;河北工业大学,机械工程学院,天津,300130
【正文语种】中文
【中图分类】TP24
【相关文献】
1.水黾研究(二)——发现村中水塘水黾消失 [J], 张溪典;
2.水黾研究(三)——实验发现水黾“杀手” [J], 张溪典;
3.仿水黾高速水上运动机器人划水产生的半球涡特征及其推进特性分析 [J], 郑俊;
张嘉钟;于开平;王宝寿;陈玮琪
4.仿水黾机器人控制系统的研究与开发 [J], 张兆隆;庄岩;靳迎波;高铁红
5.一种仿水黾新型水上行走机器人的研究 [J], 张兆隆;高铁红;高勇
因版权原因,仅展示原文概要,查看原文内容请购买。
哈尔滨工业大学研制出可在水上行走的微型机器人
哈尔滨工业大学研制出可在水上行走的微型机器人
佚名
【期刊名称】《机械工程师》
【年(卷),期】2011(000)009
【摘要】水黾(water strider)是一种长腿的昆虫,能够在池塘、湖和其他水路的表面迅速奔跑.由哈工大化工学院潘钦敏副教授领导的研究人员开发出一种可以在水面上行走的微型机器人,具有像水黾一样的水上行走能力.在军事侦察、水污染监测等领域具有广阔应用前景.有关研究成果已经刊登在美国《应用材料与界面》( ACS Applied Materials& Interfaces)杂志上.
【总页数】1页(P17)
【正文语种】中文
【相关文献】
1.美国科学家研制出可在沙地上行走的机器人 [J], 锋格
2.中国科学家研制出“水上漂”微型机器人 [J],
3.美研制出可在水上行走的微型机器人 [J],
4.美国科学家研制出可在沙地上快速行走的机器人 [J],
5.胶囊可在体内“行走” 美研制出纳米级胶囊 [J], 毛黎
因版权原因,仅展示原文概要,查看原文内容请购买。
水上无人机自主着水控制系统设计
水上无人机自主着水控制系统设计杜欢;范国梁;易建强【摘要】针对水上无人机在高海况下的着水问题,本文在分析了不同着水阶段特性的基础上,提出了一种自主着水控制系统设计方案.该方案将整个系统分为速度控制子系统和姿态控制子系统.速度控制子系统包含速度动态逆控制器和油门切换模块,姿态控制子系统包含海浪滤波器俯仰角反步控制器、高度PID控制器、俯仰角切换模块和T-S模糊推理模块.其中,海浪滤波器能有效滤除受扰姿态角中的海浪高频扰动,避免了着水之后舵面的频繁抖动;俯仰角反步控制器采用指令滤波的反步法设计,有效缓解了高海况下的舵面饱和问题.最后,在不同海况条件下进行了仿真.仿真结果表明所设计的控制系统具有良好的控制性能.【期刊名称】《控制理论与应用》【年(卷),期】2015(032)010【总页数】11页(P1305-1315)【关键词】水上无人机;自主着水控制;高海况;速度控制;姿态控制【作者】杜欢;范国梁;易建强【作者单位】中国科学院自动化研究所,北京100190;中国科学院自动化研究所,北京100190;中国科学院自动化研究所,北京100190【正文语种】中文【中图分类】TP273;V249.122水上无人机是指具有自主起降、飞行甚至是完成特定任务的水上飞机,近些年来得到了越来越广泛的关注和研究.相比于一般的陆基飞行器,水上无人机具有独特的水上起降和水面驻留作业能力,因此在军用和民用方面都有极为广泛的用途,如海上快速救援、侦察作战、海上运输、森林与城市灭火等[1-5].无人机飞行过程中,着陆阶段是事故发生最高的一个阶段,因此自主着陆控制技术已成为影响无人机发展和应用的关键技术.对于一般的无人机,着陆控制系统的设计已经取得了较多的研究成果,多种控制方法应用于着陆控制器的设计[6-11],如文献[6]采用PID控制方法设计了无人机自动着陆的纵向和横侧向控制律,并在实际飞行试验中得到了验证;文献[7]采用非线性动态逆方法设计了无人机快、慢状态子系统的控制器,使无人机在无风及定值风干扰下完成自动着陆;文献[8]采用滑模控制方法设计了无人机自动着陆系统,相比PID方法,滑模控制器具有更好的轨迹跟踪性能;文献[9]使用航迹角指令发生器产生精确的下滑轨迹,并在参数不确定的情况下采用自适应反步法设计了自动着陆控制律;文献[10]和文献[11]分别采用模糊系统和神经网络设计了智能着陆控制器,均具有较强的鲁棒性.但对于水上无人机,仅有少量的文献提及自主着水控制的研究[12-13].美国的“飞鱼(flying fish)”水上无人机在着水阶段采取开环控制策略,着水过程中关闭发动机,并将升降舵维持在最大偏转角度[12];文献[13]中总结了水上飞机在不同海况下的最优着水方向,但没有给出具体的控制系统设计方法.要实现不同海况下水上无人机的自主着水,主要面临以下两个方面的问题:首先,在水上无人机着水的一瞬间,水动撞击很大,如果不能保持较好的入水姿态,极易引发动力学不稳定现象,造成严重的上下颠簸和左右摇晃,从而损坏机身结构和机载设备;其次,在高海况条件下,着水之后海浪对水上无人机的冲击尤为明显,如果不能较好地实现海浪跟随,有可能会出现抛出海面的跳跃现象[2,5].因此,自主着水控制系统应当能够缓解水上无人机与水面的撞击,并提高其在高海况下的抗浪性能和适航性能.针对以上问题,本文设计了一种高海况下水上无人机自主着水控制系统.该系统包含速度控制子系统和姿态控制子系统.速度控制子系统由速度动态逆控制器和油门切换模块组成,姿态控制子系统由海浪滤波器、俯仰角反步控制器、高度PID控制器、俯仰角切换模块和T--S模糊推理模块组成.其中,俯仰角反步控制器采用指令滤波的反步法设计,引入对控制量的幅值、速率和带宽的限制[14-16],有效地缓解了高海况下的舵面饱和问题;海浪滤波器采用基于无源理论的非线性状态观测器设计[17-20],能有效滤除输出姿态角信号中的海浪高频扰动,并对低频状态进行重构,避免了舵面对海浪高频扰动的过度补偿.本文剩余章节安排如下:第2节描述了水上无人机模型和海浪模型;第3节分析了水上无人机在不同着水阶段的特性,并给出了相应的参考指令;第4节设计了水上无人机自主着水控制系统;第5节在不同海况下进行了仿真实验,验证所设计控制系统的有效性;第6节对全文进行了总结.2.1 水上无人机模型(Model of unmanned seaplanes)文献[2,21]中给出了水上无人机的非线性数学模型,其纵向动力学方程可以描述为其中:V,α,q,θ,xg,zg分别为水上无人机的速度、攻角、俯仰角速度、俯仰角以及重心在地球坐标系下沿Xg,Zg坐标轴的投影值;G,T,La,Da,Nw,Df分别为自身重力、发动机推力、气动升力、气动阻力、水动压力、水摩擦阻力;Ma,Mw,MT分别为气动力矩、水动力矩和发动机推力力矩;u,w分别为机体坐标系下沿Xb,Zb坐标轴的速度分量;Iy为水上无人机在Yb轴的转动惯量;αt 为发动机推力和Xb轴的夹角;m为水上无人机的质量.水上无人机的受力示意图如图1所示,详细的力和力矩的计算方法见文献[2,21].2.2 海浪模型(Wave model)为了描述水上无人机在不同海况下的运动,需建立海浪模型.在海浪研究中常用的波谱有很多种,本文采用P-M谱来产生仿真中所使用的不规则长峰波海浪,P-M 谱的表达式如下[22]:其中:U为海面以上19.4m处的平均风速,g为重力加速度.当U=7m/s时,对应的P-M谱如图2所示.上述P-M谱的近似线性模型可以表示成如下传递函数形式[22]:其中:Kw为海浪强度系数,ζ为阻尼比,ωe为遭遇频率,可以表示为其中:ω0为主导海浪频率,β为水上无人机滑行方向与海浪传播反方向的夹角,即遭遇角(迎浪时,β=0).将式(3)写成如下的状态空间形式:其中:wH为标准零均值高斯白噪声,θH为由海浪扰动产生的高频俯仰运动.注1线性模型用于海浪滤波器设计,P-M谱用于仿真.2.3 风模型(Wind model)水上无人机在整个着水过程中,会遭遇各种风干扰,因此需要建立风干扰模型.本文主要考虑风紊流,即叠加在常值风上的连续随机脉冲.本文采用德莱顿(Dryden)模型来产生风紊流[23],其中水平风紊流uturb和垂直风紊流wturb可以表示为其中:L-1为拉普拉斯反变换符号,N(s)为高斯白噪声的频域信号,Hu(s),Hw(s)分别为水平方向和垂直方向的成形滤波器,Lu,Lw分别为水平方向和垂直方向的紊流尺度,σu,σw分别为水平方向和垂直方向的紊流强度,V为无人机速度.当高度H小于300m时,其中W20为高度6m处的实测风速值.3.1 自主着水阶段(Phases of autonomous landing)本文仅考虑水上无人机的纵向着水控制.参考一般无人机的着陆过程,并防止水上无人机着水后与海浪的撞击,将整个着水过程分为直线下滑段、末端拉平段、飘落段和水面滑行段,如图3所示.下面分别给出这4个阶段的控制任务.1)直线下滑段.从高度H2开始预先规划好一条参考轨迹,使水上无人机能够稳定而快速的到达近水面.此阶段要稳定其空速,并进行高度跟踪控制.2)末端拉平段.当高度下降到H1时,进入末端拉平段,水上无人机沿指数轨迹下滑.为了避免着水时的剧烈撞击,此阶段保持较低的油门开度,以减小到达水面时的速度.3)飘落段.当高度下降到H0时,进入飘落段.此阶段关闭发动机,使速度进一步减小.为了保证着水时较好的入水角度,此阶段要进行姿态控制.4)水面滑行段.此阶段水上无人机开始沿水面滑行.刚着水的一段时间,速度仍比较快,应当保持其姿态稳定,避免与水面的撞击;当速度减慢后,应当使其进行波面跟随,避免被剧烈的海浪再次抛起.3.2 参考指令(Reference command)根据第3.1节中的分析,不同的阶段应采取不同的控制策略,总结如表1所示. 下面给出不同阶段的参考指令.1)直线下滑段.此阶段的高度指令可设计为[24]其中:X2为下滑轨迹的延长线与海平面的交点,X1为拉平的初始水平坐标,H2和H1分别为下滑段和拉平段的初始高度,γ为航迹倾角.此阶段的速度维持在恒定值,表示如下:2)末端拉平段.此阶段的高度指令可设计为[24]其中H0为飘落段的初始高度.3)飘落段.此阶段,水上无人机的俯仰角维持在恒定值,表示如下:4)水面滑行段.为了实现此阶段的控制目标,俯仰角参考指令可通过如下T-S模糊推理给出[2,25]:其中:hw(t)为与海浪的相对高度,Aj为速度V(t)的第i个模糊集,Bl为相对高度hw(t)的第j个模糊集,θj,l为俯仰角参考指令,aj为实现水上无人机波面跟随控制的控制参数,bj,l为波面跟随控制中期望的飞机和水面的相对俯仰角角度值,cj为姿态保持的控制参数,为期望的俯仰角,kq为提高水上无人机阻尼的参数.方程(19)的详细介绍和参数选择见文献[2,25],本文不再详细讨论.注2本文上述参数的取值为根据第3节对水上无人机着水过程的分析,本节设计了自主着水控制系统,系统框图如图4所示.由图4可以看出,整个控制系统可分为速度控制子系统和姿态控制子系统.速度控制子系统包含速度动态逆控制器和油门切换模块;姿态控制子系统包含海浪滤波器、俯仰角反步控制器、高度PID控制器、俯仰角切换模块和T-S模糊推理模块.下面分别介绍各部分设计.4.1速度动态逆控制器(Velocity dynamic inversion controller)定义非线性模型(1)中的第1个方程可写成如下形式:定义速度跟踪误差V˜=V-Vc,则速度跟踪误差的动态方程为设计油门控制信号δth1为其中kV>0.则式(23)可写为4.2 油门切换模块(Throttle switch module)油门切换模块的作用是在不同的着水阶段提供不同的油门指令.根据上一节的分析,油门切换模块可以设计为其中:δth1由式(24)得到,δth2=0.1max(δth),δth3=0.4.3 海浪滤波器(Wave fliter)在海浪干扰下,水上无人机的姿态运动可以看作低频运动和高频运动的叠加.因此,结合式(1)和式(5)-(6),姿态运动方程可以写成如下形式:其中:θL和qL分别为低频俯仰角和低频俯仰角速率,δe为升降舵偏转量,为气动力俯仰力矩操纵系数,f(θL,qL)为气动力、水动力和发动机推力的合力矩.海浪滤波器的功能是利用状态观测器从受海浪扰动的姿态角信息中重构低频运动成分,避免高频海浪扰动进入控制回路.仿照船舶运动控制中海浪滤波器的设计方法,基于无源理论设计如下的非线性状态观测器[17,19-20]:通过选取合适的观测增益系数,可以保证非线性观测器(28)是无源的和稳定的.在忽略白噪声的情形下,即假定wH≡0,和渐近收敛于零.具体的参数选择和观测器无源性、稳定性的证明,见文献[17,19-20],本文不再详细讨论.4.4 俯仰角反步控制器(Pitch angle backstepping controller)水上无人机在高海况下着水之后,极易引发舵面饱和现象.本节采用指令滤波的反步法设计俯仰角控制器,引入对舵面和中间状态量的幅值、速率和带宽的限制,可有效缓解饱和现象的发生.带幅值、速率和带宽限制的指令滤波器如图5所示[14-15],其中,xcd为控制输入信号,xc和x˙c为实际可执行的控制输入信号及其导数.下面进行俯仰角反步控制器设计.第1步为了避免高频海浪扰动进入控制回路,定义低频俯仰角跟踪误差为由式(28)可得跟踪误差的动态方程为定义扩展俯仰角跟踪误差为其中辅助滤波误差εθ为对式(32)求导,可得其中2为扩展俯仰角速率跟踪误差,将在第2步给出定义.第2步定义低频俯仰角速率跟踪误差为z2=,由式(28)可得其跟踪误差的动态方程为设计虚拟升降舵偏转量δe cd为其中kq>0.将δe cd通过上述指令滤波器,得到实际可执行的升降舵偏转量δe c.由于δe c是物理可实现的,可假定δe=δec.定义扩展俯仰角速率跟踪误差为其中辅助滤波误差εq为对式(37)求导,可得稳定性分析取如下的Lyapunov函数:求导,并结合式(34)(39),可得式(41)可以写成如下形式:使用Young's不等式,可得由矩阵U和W的表达式可知,存在kξ1,kξ2,kθ1,kθ2使得U和W正定.式(43)表明姿态闭环控制系统的扩展跟踪误差相对于状态观测误差是渐近稳定的.又由第4.3节可知,状态观测误差渐近收敛于零.因此,根据文献[26],整个姿态闭环控制系统的稳定性得到保证,且扩展跟踪误差渐近收敛于零.注3上述分析过程是针对扩展跟踪误差1和2而言,无法直接保证实际跟踪误差z1和z2渐近收敛于零.当指令滤波器未饱和时,辅助滤波误差εθ和εq收敛于零,因此实际跟踪误差也渐近收敛于零;但当指令滤波器发生饱和时,期望的控制输入信号无法被完全执行,导致实际跟踪误差可能增大,而由于辅助滤波误差的补偿作用,扩展跟踪误差仍是渐近收敛的.4.5 高度PID控制器(Altitude PID controller)作为外环控制器,高度PID控制器给出在直线下滑段和末端拉平段的期望俯仰角指令,具体表达为其中:eh=Hc-H,khp,khi,khd为相应的比例、积分、微分系数.根据第3节的描述,Hc可以表示为4.6 俯仰角切换模块(Pitch angle switch module)俯仰角切换模块的作用是在不同的着水阶段为俯仰角控制器提供不同的期望俯仰角指令.根据第3节的分析,俯仰角切换模块可以设计为其中:Nw为水动力,θc0由式(44)得到,θ0和θj,l已在第3节中给出.T-S模糊推理模块已在第3节中讨论过,本节不再具体给出.上述几个部分组成了整个自主着水控制系统,此系统可使水上无人机在不同的海况状态下自主着水.为了验证本文设计的自主着水控制系统的有效性,本节将选取以下几种不同的海况条件进行仿真实验:i)无风紊流,静水面;ii)有风紊流,三级海况,遭遇角为180°(顺浪);iii)有风紊流,三级海况,遭遇角为60°;iv)有风紊流,三级海况,遭遇角为0°(逆浪).其中,三级海况的平均风速设定为U=7m/s,风紊流参数取为W20=7m/s.水上无人机的初始配平状态选择为:V=50m/s,α=-1.97°,q= 0rad/s,θ=-1.97°,H=200m.控制器参数选择为:kV=10,kθ=5,kq=5;观测器参数选择为:k1=[-80 24]T,k2=5,k3=1.俯仰角速率q和升降舵偏转量δe的指令滤波器参数设置如表2.首先,条件i)下的仿真曲线如图6和图7所示.从图6中的着水轨迹可以看出,在直线下滑段,水上无人机可以较好地跟踪参考轨迹,图7(a)表明在此阶段空速维持在一个恒定值.在大约60s左右,水上无人机开始转入末端拉平段.由于此阶段的油门开度设置为一个较低的数值(如图7(e)所示),速度开始减小,俯、仰角开始增加(如图7(a)(b)所示).从图6左下角的放大部分可以看出,此阶段的轨迹跟踪仍然有较好的效果.在大约76s~83s之间,水上无人机处于飘落阶段.在此阶段,发动机关闭,速度继续减小.俯仰角控制在一个较大的数值,使其着水时有较好的入水角度,避免与水面的过大冲击.从图6右上角的放大部分可以看出,由于俯仰角的增加,此阶段的高度略有上升.在大约83s时,水上无人机开始着水.着水的瞬间水动冲击很大(如图7(d)所示),此时的升降舵也会产生一个较大的偏转量(如图7(f)所示).在着水之后,水动力逐渐减小,水上无人机的状态也趋于稳定.其次,条件ii)下的仿真曲线如图8和图9所示.本文所采用的水上无人机模型对应的重心和机身底部之间的距离为0.552m,而三级海况的有义波高超过了1m,因此三级海况相对飞机的尺寸而言属于较大的海况级别.从图9的(b)-(c)(e)-(f)可以看出,由于加入了风紊流,在前3个阶段水上无人机的俯仰角和俯仰角速率出现了振荡,油门和舵面偏转也出现了抖动,但在控制器作用下,其状态仍能稳定在一定范围内.图9的(b)-(d)表明,在三级海况下,着水之后海浪对飞机的冲击较大,俯仰角和俯仰角速率在较大范围内波动.由于引入了海浪滤波器,并在控制器设计时考虑了舵面特性,着水之后升降舵仅出现了几次饱和并且偏转变化在允许的范围之内(如图9(f)所示).从图8右上角的放大部分可以看出,着水之后水上无人机对海浪的跟随效果较好,有效的避免了海浪的冲击.为了验证不同遭遇角对水上无人机着水的影响,在条件ii)、iii)和iv)下进行对比实验.由于着水过程的前3个阶段相同(如图9所示),这里只对着水之后3种条件下水上无人机的状态响应进行比较,如图10-12所示.从图10的(a)-(b),图11的(a)-(b)和图12的(a)-(b)可以看出,遭遇角为180°(顺浪)时水上无人机跟踪海浪的效果最好,俯仰角在较小范围内波动,海浪的冲击也最小.在遭遇角为60°时,由于遭遇频率变大,海浪对机身的冲击也变大,俯仰角变化范围也较大,着水之后出现了被海浪抛起的现象.而在遭遇角为0°(逆浪)时,此现象更为明显.图11(c)和图12(c)表明在后两种条件下舵面饱和现象也较为严重,均出现了多次饱和.但在这3种条件下,所设计的自主着水控制系统均能使水上无人机成功着水.此对比实验表明,调整水上无人机和海浪的遭遇角度、减少海浪遭遇频率能有效减弱海浪的冲击,改善着水性能.为了验证海浪滤波器的作用,图13给出了条件ii)下测量姿态角和滤波后姿态角的变化曲线.由图13可以看出,海浪滤波器能有效滤除高频扰动,并在受海浪扰动的俯仰角测量值中重构出低频运动状态.为了进一步验证海浪滤波器的有效性,图14给出了条件ii)下着水之后有无海浪滤波器时升降舵面偏转的对比.由图14可以看出,未加入海浪滤波器时,升降舵会出现频繁的抖动现象,这会造成舵机的磨损和额外的能量消耗;而加入海浪滤波器之后,这种现象得到明显的缓解,有效避免了舵面对海浪高频扰动的过度补偿.本文针对水上无人机在高海况下的着水问题,提出了一种自主着水控制系统设计方案,目的在于提高水上无人机的抗浪性能和安全性能.所设计的控制系统包含速度控制子系统和姿态控制子系统.速度控制子系统包含速度动态逆控制器和油门切换模块,姿态控制子系统包含海浪滤波器、俯仰角反步控制器、高度PID控制器、俯仰角切换模块和T-S模糊推理模块.仿真结果表明所设计的控制系统可使水上无人机在不同海况下成功自主着水,提高了适航性能,有利于水上无人机装备的发展和应用.[1]EUBANK R D.Autonomous flight,fault,and energy management of the flying fish solar-powered seaplane[D].Michigan:University of Michigan,2012.[2]朱迎谷.水上无人机建模与起飞控制研究[D].北京:中国科学院大学,2013.(ZHU Yinggu.Modeling and taking off control design for an unmannedflying boat[D].Beijing:University of Chinese Academy of Sciences,2013.)[3]褚林塘,叶树林.水上飞机文集[M].北京:航空工业出版社,2011. (CHULintang,YEShulin.CollectedWorksofSeaplane[M].Beijing:Aviation Industry Press,2011.)[4]YANG X B,WANG T M,LIANG J H,et al.Survey on the novel hybrid aquatic-aerial amphibious aircraft:Aquatic unmanned aerial vehicle (AquaUAV)[J].Progress in Aerospace Sciences,2014,74:131-151. [5]DU H,FAN G L,YI J Q.Autonomous takeoff control system design for unmanned seaplanes[J].Ocean Engineering,2014,85(3):21-31. [6]张剑锋,刘秉华,贾彩娟.无人机的自动着陆控制[J].控制理论与应用,2009,26(12):1383-1386.(ZHANG Jianfeng,LIU Binghua,JIA Caijuan.Automatic landingcontrol for an unmanned aerial vehicle[J].Control Theory&Applications,2009,26(12):1383-1386.)[7]韩英华,范彦铭.基于非线性动态逆的无人机自动着陆控制系统[J].航空学报,2008,29(增刊):66-72.(HAN Yinghua,FAN Yanming.Control system of automatic landing of UAV based on nonlinear dynamic inversion[J].Acta Aeronautica et Astronautica Sinica,2008,29(Sup):66-72.)[8]RAO D V,GO T H.Automatic landing system design using sliding mode control[J].Aerospace Science and Technology,2014,32(1):180-187.[9]JU H S,TSAI C C.Longitudinal auto-landing controller design viaadaptive backstepping[J].International Journal of Adaptive Control and Signal Processing,2009,23(7):640-666.[10]NHO K,AGARWAL R K.Automatic landing system design using fuzzy logic[J].Journal of Guidance,Control,and Dynamics,2000,23(2):298-304.[11]JUANG J G,CHENG K C.Application of neural networks to disturbances encountered landing control[J].IEEE Transactions on Intelligent Transportation Systems,2006,7(4):582-588.[12]EUBANK R D,ATKINS E M,MACY D.Autonomous guidance and control of the flying fish ocean surveillance platform[C]//AIAA************************************:AIAA,2009:2009-2021. [13]NEBYLOV A,NEBYLOV V.Seaplane landing smart control at wave disturbances[C]//Proceedings of the 18th IFAC World ano:IFAC,2011:3021-3026.[14]FARRELL J,POLYCARPOU M,SHARMA M.On-line approximation based control of uncertain nonlinear systems with magnitude,rate and bandwidth constraints on the states and actuators[C]//Proceedings of the American Control Conference.Boston:IEEE,2004:2557-2562.[15]FARRELL J,SHARMA M,POLYCARPOU M.Backstepping-based flight control with adaptive function approximation[J].Journal of Guidance,Control,and Dynamics,2005,28(6):1089-1102.[16]FARRELL J,POLYCARPOU M,SHARMA M,et mand filtered backstepping[J].IEEE Transactions on Automatic Control,2009,54(6):1391-1395.[17]FOSSEN T I,STRAND J P.Passive nonlinear observer design for ships using Lyapunov methods:full-scale experiments with a supply vessel[J].Automatica,1999,35(1):3-16.[18]TORSETNES G,JOUFFROY J,FOSSEN T I.Nonlinear dynamic positioningofshipswithgain-scheduledwavefiltering[C]//Proceedings of the 43rd IEEE Conference on Decision and Control.Atlantis:IEEE,2004:5340-5347.[19]彭秀艳,胡忠辉.带有海浪滤波器的船舶航向反步自适应输出反馈控制[J].控制理论与应用,2013,30(7):863-868.(PENG Xiuyan,HU Zhonghui.Adaptive nonlinear output feedback control with wave filter for ship course[J].Control Theory&Applications,2013,30(7):863-868.)[20]DU H,FAN G L,YI J Q.Nonlinear longitudinal attitude control of an unmanned seaplane with wave filtering[J].International Journal of Automation and Computing,2015,(Accepted).[21]ZHU Y G,FAN G L,YI J Q.Modeling for flying boats in regular wave [C]//Proceedings of the 10th World Congress on Intelligent Control and Automation.Beijing:IEEE,2012:3019-3024.[22]FOSSEN T I.Guidance and Control of Ocean Vehicles[M].New York:Wiley,1994.[23]itary specification MIL-F-8785C[S].November 5,1980. [24]XIONG H,YI J Q,FAN G L,et al.Anti-crosswind autolanding of UAVs based on active disturbance rejection control[C]//Proceedings of the Guidance,Navigation,and Control Conference.Toronto:AIAA,2010:2010-7734.[25]ZHU Y G,FAN G L,YI J Q.Controller design based on T-S fuzzy reasoning and ADRC for a flying boat[C]//Proceedings of the 10th IEEE International Conference on Control and Automation. Hangzhou:IEEE,2013:1578-1583.[26]ASTOLFI A,KARAGIANNIS D,ORTEGA R.Nonlinear and Adaptive Control with Applications[M].London:Springer,2008.杜欢(1989-),男,博士研究生,目前研究方向为非线性控制、飞行控制,E-mail:*************.cn;范国梁(1979-),男,副研究员,目前研究方向为无人自主系统、飞行控制,E-mail:******************.cn;易建强(1963-),男,研究员,博士生导师,目前研究方向为智能控制、自适应控制、飞行控制,E-mail:******************.cn.。
仿生机械水黾特性研究与实现
仿生机械水黾特性研究与实现ii THE CHARACTERISTIC RESEARCH AND REALIZATION ON BIONIC MECHANICAL WATER STRIDERABSTRACTNowadays the research on bionic robot is an advanced subject in robot field. The futuredeveloping direction of bionic robot is to manufacture a robot which can work on adverse circumstances instead of man in simulation to excellent functions of biology on diversified given conditions. The characteristic research and realization on bionic mechanical water strider is developing a novel bionic based on the basic principle that water strider can walk on water surface. Domestic and foreign scholars have made some researches on bionic mechanical water strider, but the researches are now on the stage of laboratory research. In order to realize the aim that the robot can fulfill tasks on far-water surface independently, many researches, innovations, experimentations on robot should be done. Therefore, to study the bionic mechanical water strider not only has important scientific significance but military and civilian significance. It has very broad application prospects.This paper makes research aiming at the walking function of the water strider and put forwards a novel bionic mechanical water strider. The main contents of the work are as follows: Based on the virtual prototyping technology the robot driving mechanism and the overall mechanism have been designed and simulated. The mechanism was verified reasonably. The mechanism kinematics was simulated based on ADAMS software to obtain trajectory, speed and acceleration curve. The reasonableness of the structure design, efficiency of movement and the correctness of function were confirmed. Structural strength was tested to meet actual requirements by analysis on strength of the joints.Through hydraulics analysis, robots thrash legs force formula and the overall stability of calculation was set up.Based on ANSYS software modality analysis was done to compute the natural frequency and vibration mode of the structure to improved weak structural design.Based on PIC microcontroller the motion control system was designed. The physical prototype was made to verify the correctness and rationality through experiment.Key words: bionic robots, water strider, hydraulics, kinematics, modal111222111222河北工业大学硕士学位论文第一章绪论§1-1 引言仿生机器人的研究是以仿生学和机器人技术的发展为基础的。
水上行走机器人智能控制方法研究及仿真
水上行走机器人智能控制方法研究及仿真
魏鲜明;徐林森;赵江海;曹凯;张文举
【期刊名称】《系统仿真学报》
【年(卷),期】2014(26)1
【摘要】以蛇怪蜥蜴为对象,研究其水上行走功能。
通过分析蛇怪蜥蜴水上行走机理,建立了水上行走机器人虚拟样机。
通过机电系统联合仿真,得到了水上行走机器人的非线性模型。
由于水面环境的复杂性及特殊性,传统的基于模型的精确运动学求解方法无法适用。
因此设计了中枢模式发生器(CPG)-模糊控制与CPG-PID两种智能控制算法,并比较了两种控制算法的性能。
仿真结果分析表明,这两种算法均能满足机器人水上行走过程中的控制要求。
【总页数】6页(P163-168)
【作者】魏鲜明;徐林森;赵江海;曹凯;张文举
【作者单位】中国科学技术大学;中国科学院合肥物质科学研究院;常州先进制造技术研究所;71352部队保障部
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.仿生双足水上行走机器人行走机构的运动学分析及参数化设计
2.一种水上行走机器人红外遥控器的设计与实现
3.全方向蠕动机器人斜坡步态智能控制方法仿真
4.
一种仿水黾新型水上行走机器人的研究5.仿生双足水上行走机器人优化设计及控制方法
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第39卷第5期河北工业大学学报2010年10月V ol.39No.5JOURNAL OF HEBEI UNIVERSITY OF TECHNOLOGY October2010
文章编号:1007-2373(2010)05-0057-03
受水黾启发水上行走机器人控制系统开发
李蕊,高铁红,杨世忠,薛永红
(河北工业大学机械工程学院,天津300130)
摘要受水黾在水面上能快速滑行或跳跃运动机理的启发,研究一种水上行走机器人.根据功能仿生原理并考虑机器人的负载能力,该机器人前后4腿采用漂浮原理支撑,两中间腿模仿水黾中腿划水功能产生划水动作.进行了水上行走机器人遥控控制系统开发,并在实验室环境下进行机器人运动实验研究.研究水上行走机器人的长远目标是实现机器人独立在远距离水面等环境下自主工作.
关键词遥控;水黾;机器人;水上行走
中图分类号TP24文献标识码A
A Control System Development for a Water-walking
Robot Inspired by Water Striders
LI Rui,GAO Tie-hong,YANG Shi-zhong,XUE Yong-hong
(School of Mechanical Engineering,Hebei Univercity of Technology,Tianjin300130,China)
58河北工业大学学报第39卷
2水上行走机器人
根据功能仿生原理,在研究仿生原型水黾结构及运动特性基础上,模仿水黾六条腿结构布局和两中间腿做划水运动进行水面滑行的运动机理,构建微小型水上行走机器人,如图1所示.该机器人以电磁铁二元逻辑控制替代电机复杂伺服驱动,其具有驱动数量少、结构简单、易微小型化、机动性好、转弯灵活、划水效率高、控制简单等特点.
3水上行走机器人控制系统
该机器人的控制系统采用遥控操作,总体结构框图如图2所示.该控制系统主要内容包括硬件部分搭建和
软件部分设计,根据系统要求,搭建一个基于AT89C51
单片机[10]的主运动控制系统.
3.1控制系统硬件部分
水上行走机器人控制系统硬件部分包括遥控器部件和机器人的接收遥控信号的控制系统硬件.
系统的硬件主要由信号输入模块,主控模块,驱动
执行模块等组成.其中信号输入部分由遥控通讯发射部
分——TX100ASK 模块和接收部分——RX100ASK 模块
完成,两模块按照串口规则通讯.其中遥控发射部分为按键电路、编码控制模块、发射模块等,是遥控器的一部分;接收部分为接收模块、编码控制模块、逻辑部分和执行部分,属机器人运动驱动的执行部件;用户通过
按键输入信息,发射部分将信号传输给接收模块,再通过主控模块将信号发送给被控对象,从而实现遥控通讯
技术控制终端.主控模块采用AT89C51单片机作为控制核心,在自动运行时当AT89C51单片机接收到遥控信号
输入时,AT89C51单片机自动控制电磁铁的通断电.驱
动执行模块包括3个电磁铁,通过电磁铁的通断电的配合来完成机器人腿部的划水动作,从而使机器人能够实现前进,左转,右转等运动.3.2控制系统软件部分
根据水上行走机器人运动控制方案,设计运动控制软件系统.控制系统软件部分主要包括主程序和子程序.主程序完成系统参数初始化、循环检测外部控制信号、消抖处理和调用相应子程序的功能;动作子程序包括前进、左转和右转3个子程序,控制电磁铁的通断电时间和动作顺序.主程序流程图如图3所示.左转弯动作子程序流程图如图4所示.
4水上行走机器人实验研究
在设计了遥控控制系统基础上,重新制作水上行走机器人,在实验室环境下,进行水上行走机器人在水面上前行、转弯实验,如图5所示.实验表明,该机器人可以实现前进、转弯等运动,具有良好的速度响应特性、运动灵活性,划水效率高、控制简单方便.
图1
水上行走机器人
Fig.1The water-walking robot
程序输入
指示灯及按键电路复位信号
TX100ASK 无线发送模组RX100ASK 无线接收模组AT89C51TTL 电平信号放大电路
AT89C51电磁铁1电磁铁2
电磁铁3水上行走机器人图2控制系统总体结构框图Fig.2The overall diagram of the control system
59
李蕊,等:受水黾启发水上行走机器人控制系统开发
第5期5结论
本文进行了水
上行走机器人控制系统开发,以AT89C51单片机为核心芯片并添加遥控通讯功能,设计遥控通讯技术控制终端,使机器人能够实现前进,左转,右转等运动.研究水上行走机器人的长远目标是可以实现机器人独立在远距离水面等环境下自主工作.由于实现遥控操作,本机器人更适合应用于要求本身承载能力强的场合,如环境监测、军事侦察等,适合在人类不适合达到的区域工作.因此,开展水上行走机器人的研究不仅具有重要的科学意义而且将在军用和民用上具有非常广阔的应用前景.
参考文献:
[1]Bush ,John W M ,David L Hu ,et al .The hydrodynamics of water strider locomotion [J ].Nature ,2003(424):663-666.[2]Takashi Yabe ,Kazuya Chinda ,Tomohiro Hiraishi .Computation of surface tension and contact angle and its application to water strider [J ].Computers
&Fluids ,2007,36:184-190.
[3]髙信英明,小平圭佑,竹田ひとみ.アメンボの脚構造をモデルとしたロボットの基礎研究[EB/OL ].http://kiko.mech.kogakuin.ac.jp .[4]高雪峰,江雷.天然超疏水生物表面研究的新进展[J ].物理,2006,35(7):559-564.
[5]Bush J ,Hu D .Walking on Water :Biolocomotion at the Interface [J ].Annu Rev of Fluid Mech ,2006,38:339-369.
[6]Suhr S H ,SongY S ,Lee S J ,et al .Biologically inspired minature water strider robot [A ].Proceedings of the Robotics :Science and Systems I
[C ].2005:319-325.
[7]Girard .Design review #1:water strider [Z ].Columbia University ,2005.2.
[8]Hideaki TAKANOBU ,Jun YAMANAKA ,et al .Development of Robot Based on Water strider [EB/OL ].http://kiko.mech.kogakuin.ac.jp .[9]高铁红.仿水黾机器人机构及性能分析[D ].天津:河北工业大学,2008.
[责任编辑张颖志]
图3主程序流程图
Fig.3The main program flow chart
图5水上行走机器人水上实验
Fig.5
The water experiment of the water-walking robot
图4水上行走机器人水上实验
Fig.4The water experiment of the water-walking robot
开始初始化
接受模块是否前进?消抖延时是否前进?前进程序是否左转?消抖延时是否左转?左转程序是否右转消抖延时是否右转?右转程序停止程序是否停止?消抖延时是否停止?Y
Y
N
N
N
N
N
N
N
N
Y
Y
Y
Y
Y
Y
开始
电磁铁1上电,电磁铁3断电
延时
是否停止电磁铁1断电,电磁铁3上电
电磁铁2上电
延时是否停止
延时是否停止
电磁铁2断电
延时
是否停止结束
Y
Y Y Y N
N
N
N。