基于 PLC 的机器人电气控制系统的设计
PLC在工业机器人控制中的设计应用

PLC在工业机器人控制中的设计应用随着工业自动化技术的不断发展,工业机器人在生产制造领域中扮演着愈发重要的角色。
而作为工业自动化系统的关键组成部分之一,可编程逻辑控制器(PLC)在工业机器人控制中也发挥着不可替代的作用。
PLC通过其灵活可靠的控制能力,为工业机器人的运行提供了强大的保障,使得生产制造过程更加高效、精准,同时也提高了机器人的安全性和稳定性。
本文将着重探讨PLC在工业机器人控制中的设计应用,探讨其在工业机器人控制领域的重要性和作用。
一、PLC在工业机器人控制中的基本原理1. PLC的工作原理PLC是一种用于工业控制系统的数字计算机,其主要功能是根据预设的程序对输入的信号进行处理,然后输出相应的控制信号,以控制机器设备的运行。
PLC通过其自身的程序运行逻辑和存储能力来实现对设备和系统的自动控制,其操作方式简单灵活,运行稳定可靠。
PLC的工作原理是基于输入、输出和中央处理器三者之间的关系,当接收到输入信号时,PLC通过程序运算生成对应的输出信号,从而实现对设备的控制。
工业机器人是一种用于代替人工进行生产制造的自动化设备,其控制原理是借助先进的控制系统,通过程序控制精确地执行各种任务。
工业机器人通常由机械结构、控制系统、传感器和执行机构等部分组成,其中控制系统起着至关重要的作用。
控制系统通过传感器感知环境信号,然后根据预设的控制程序生成相应的控制信号,驱动执行机构完成各种动作任务。
工业机器人的控制系统要求具有高速、高精度和高可靠性,以满足各种复杂的生产制造需求。
1. 灵活多样的控制方式2. 高精度的动作控制3. 多功能的安全保护4. 高效稳定的通信接口PLC的设计应用不仅体现在其对机器人动作的控制上,还体现在其与其他设备的高效稳定的通信接口上。
工业机器人通常需要与各种传感器、执行机构、监控设备等各种设备进行数据交换和协作控制。
PLC作为中央控制设备,可以通过其丰富的通信接口,实现与各种设备的高效稳定的数据通信。
基于PLC控制的工业机器人系统设计与实现

03
工业机器人系统设计
工业机器人系统需求分析
01
02
03
任务需求
明确工业机器人需要完成 的任务,如物料搬运、装 配、焊接等。
性能需求
确定工业机器人的运动性 能指标,如速度、加速度 、定位精度等。
可靠性需求
确保工业机器人在长时间 运行中保持稳定性和耐久 性。
工业机器人机械结构设计
机构类型选择
根据应用场景选择合适的机构类型,如关节型、串联型等。
控制系统性能测试
控制信号稳定性测试
通过在控制系统中添加反馈环节,监测控制信号的稳定性和抗干扰能力。
控制算法性能测试
针对控制系统中使用的算法,进行功能验证和性能测试,包括逻辑运算、数值计算等。
06
结论与展望
研究成果总结
系统设计
算法优化
成功构建了一个基于PLC控制的工业机器人 系统,实现了对机器人运动轨迹、速度、加 速度等参数的精确控制。
的数据交换和控制指令的发送。
05
系统测试与性能评估
系统测试方案与实施
测试计划制定
根据系统功能需求,制定详细的测 试计划,包括测试目标、测试内容 、测试方法等。
测试环境搭建
根据测试计划,搭建相应的测试环 境,包括机器人、PLC控制系统、 传感器等。
测试数据采集
通过测试程序,采集系统在各种工 况下的运行数据,如机器人运动轨 迹、控制信号等。
通过改进传统的运动控制算法,提高了机器 人的运动性能和稳定性,减少了运动轨迹的 误差。
实时监控
实验验证
系统具备实时监控功能,可以在线检测机器 人的运动状态和位置信息,及时发现并处理 异常情况。
经过多次实验验证,系统在各种条件下均表 现出良好的稳定性和可靠性,达到了预期的 设计目标。
基于 PLC 码垛机器人控制系统的设计
基于 PLC 码垛机器人控制系统的设计作者:颜安冷晓春宋艳芳来源:《科学与财富》2020年第20期摘要:随着工业自动化技术的进一步成熟与发展,码垛机器人在水泥、包装、物流等行业已经得到了广泛的应用,并且在工业自动化产业的升级发挥着重要作用。
由于市场环境不断变化和工业4.0的提出与发展,本文研究开发了基于 PLC 一款四自由度直角坐标纸箱码垛机器人,来代替人工码垛。
关键词:PLC;交流伺服;码垛机器人1.;;;;; 引言自动化码垛技术作为物流方面的重要环节,在工业自动化中已经得到了广泛的应用。
例如在自动化流水线上,通过机器人把从流水线上输送过来的纸箱等物料按照实现规定的摆放规则依次在托盘上堆放起来,其主要目的是为了使得物料的存储、搬运、运输变得更加方便有序。
而传统的机械式自动化码垛设备己经不能满足人们对工业生产自动化的高要求,取而代之的是更为先进的智能化码垛机器人。
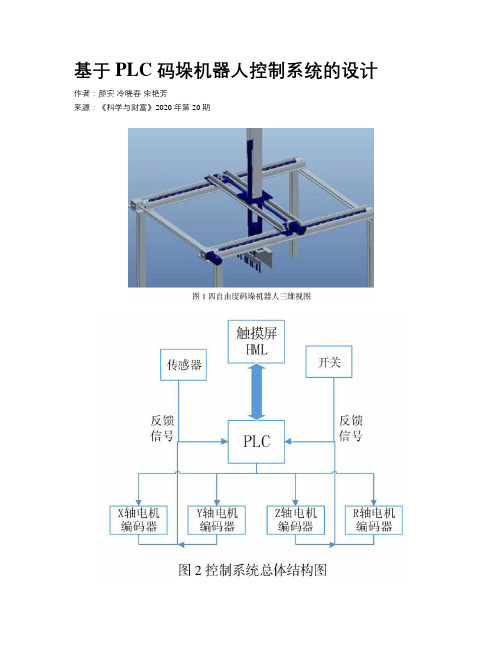
2.;;;;; 码垛机器人组成根据工厂生产线的实际情况,设计一款4自由度的直角坐标机器人就能够实现码垛任务。
该机器人的空间姿态少,结构简单,重复定位精度高,其三维视图如图1所示。
码垛机器人不但可以沿着 X 轴(前后),Y 轴(左右),Z 轴(上下)方向作直线运动,还能够旋转(R)定位,R 轴的旋转实现对货物的夹取以及码垛,其中 R 轴附加在Z 轴。
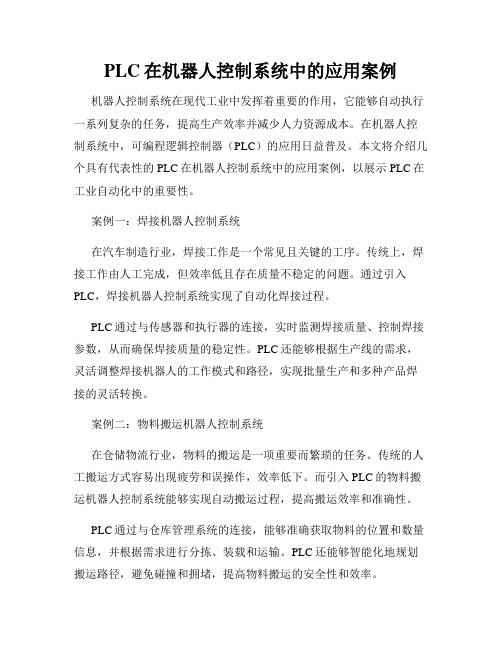
3.;;;;; 控制系统设计方案3.1;; 控制系统的思路控制系统的流程框图如图2所示。
由图2所知,采用三菱 PLC 作为主控制器,交流伺服电机和气缸作为执行机构,位置传感器和光电编码器作为实时检测装置。
主要作用是用来检测是否码垛和码垛的位置,实现对码垛位置的精确定位以及控制电机的运转。
现场工作人员按照生产控制要求操作,指挥码垛机器人完成相关的工作任务。
3.2控制系统的方案其中前三个伺服电机分别控制 XYZ 三个轴的运动,最后一个电机驱动末端执行器的夹紧和放松以及旋转运动,码垛机器人在不同的工作方式下有不同的运行模式。
PLC在机器人控制系统中的应用案例
PLC在机器人控制系统中的应用案例机器人控制系统在现代工业中发挥着重要的作用,它能够自动执行一系列复杂的任务,提高生产效率并减少人力资源成本。
在机器人控制系统中,可编程逻辑控制器(PLC)的应用日益普及。
本文将介绍几个具有代表性的PLC在机器人控制系统中的应用案例,以展示PLC在工业自动化中的重要性。
案例一:焊接机器人控制系统在汽车制造行业,焊接工作是一个常见且关键的工序。
传统上,焊接工作由人工完成,但效率低且存在质量不稳定的问题。
通过引入PLC,焊接机器人控制系统实现了自动化焊接过程。
PLC通过与传感器和执行器的连接,实时监测焊接质量、控制焊接参数,从而确保焊接质量的稳定性。
PLC还能够根据生产线的需求,灵活调整焊接机器人的工作模式和路径,实现批量生产和多种产品焊接的灵活转换。
案例二:物料搬运机器人控制系统在仓储物流行业,物料的搬运是一项重要而繁琐的任务。
传统的人工搬运方式容易出现疲劳和误操作,效率低下。
而引入PLC的物料搬运机器人控制系统能够实现自动搬运过程,提高搬运效率和准确性。
PLC通过与仓库管理系统的连接,能够准确获取物料的位置和数量信息,并根据需求进行分拣、装载和运输。
PLC还能够智能化地规划搬运路径,避免碰撞和拥堵,提高物料搬运的安全性和效率。
案例三:装配机器人控制系统在电子产品制造行业,装配工作需要高度的精确性和稳定性。
PLC在装配机器人控制系统中充当着重要的角色,实现了高效、准确的产品装配。
PLC通过与传感器的连接,能够实时检测装配工艺中的关键参数,如零件的位置、装配力度等。
基于这些数据,PLC能够控制机器人的动作,保证装配过程的准确性。
PLC还能够实现工艺参数的灵活调整,适应不同产品的装配需求。
结论PLC在机器人控制系统中的应用案例展示了其在工业自动化中的重要作用。
通过PLC的引入,机器人控制系统能够实现自动化、高效率、高准确性的生产过程,提高工业生产的竞争力。
随着技术的不断进步,PLC在机器人控制系统中的应用将会更加广泛,为工业自动化带来更多的创新和发展。
基于PLC的电气自动化控制系统设计
基于PLC的电气自动化控制系统设计一、引言在工业生产和制造过程中,电气自动化控制系统起着至关重要的作用。
电气自动化控制系统通过各种电气设备和技术,实现对生产过程的自动控制和监测,提高了生产效率和产品质量。
其中,PLC(可编程逻辑控制器)是电气自动化控制系统中的核心。
本文将探讨基于PLC的电气自动化控制系统设计。
二、PLC的基本原理和特点PLC是一种特殊用途的计算机,用于控制工业自动化过程。
其基本原理是通过输入接口采集传感器和开关的信号,经过处理后,通过输出接口控制执行器和执行元件,从而实现对工业设备和生产过程的控制。
PLC的特点包括可编程性、可靠性、稳定性和实时性等。
三、PLC的应用领域基于PLC的电气自动化控制系统广泛应用于各个领域,包括制造业、化工业、电力系统、交通运输等。
在制造业中,PLC可以控制机械设备、生产线和装配过程,实现自动化生产和监控。
在化工业中,PLC可以控制各种化工过程,确保生产过程的安全和稳定。
在电力系统中,PLC可以监控和控制电力变压器、开关设备和电力输配系统,保证电力系统的正常运行。
四、PLC的软硬件配置PLC的软硬件配置决定了其在电气自动化控制系统中的功能和性能。
通常,PLC的硬件配置包括CPU、输入模块、输出模块、通信模块和电源模块等。
软件配置包括PLC编程软件和可视化软件等。
通过合理配置PLC的软硬件,可以满足不同应用场景下的控制需求。
五、基于PLC的电气自动化控制系统设计步骤1. 确定控制需求:根据具体应用场景和需求,确定需要控制和监测的设备和过程。
2. PLC选型:根据控制需求和性能要求,选择适合的PLC型号和配置,确保满足控制系统的要求。
3. 硬件布置:根据设备和过程的布局,合理布置PLC的硬件组件,如输入模块、输出模块和通信模块等。
4. 编程设计:使用PLC编程软件,设计控制程序,包括逻辑控制、数据采集和通信等功能。
5. 软件界面设计:使用可视化软件,设计人机界面,使操作者能够直观地监控和控制系统。
基于PLC和触摸屏的SCARA机器人控制系统设计
收稿日期:2018-08-28基金项目:福建省自然科学基金项目(2018J01556);2018年福建省高校杰出青年科研人才培育计划(闽教科〔2018〕 47号);宁德师范学院重大科研项目培育计划项目(2017ZDK20);福建省本科高校教育教学改革研究 项目(FBJG20170254)作者简介:胡洪钧(1988 -),男,江西九江人,讲师,硕士,研究方向为机电控制与机器人技术。
基于PLC 和触摸屏的SCARA 机器人控制系统设计Design of SCARA robot control system based on PLC and touch-screen胡洪钧HU Hong-jun(宁德师范学院 信息与机电工程学院,宁德 352100)摘 要:对实验室里闲置的二手SCARA机器人进行改造,采用PLC与触摸屏重新构建了机器人控制系统。
上位机由PC机和触摸屏组成,互相通信的两台PLC构成系统下位机。
介绍了该机器人硬件系统的工作原理及其组成;对系统软件设计进行了解析,其中重点介绍了人机交互界面的设计;最后对该机器人系统的现场调试进行了阐述。
关键词:SCARA机器人;可编程控制器(PLC);触摸屏;系统调试中图分类号:TP24 文献标识码:A 文章编号:1009-0134(2019)05-0098-030 引言SCARA 机器人具有3个旋转关节和1个移动关节,旋转关节轴线相互平行,在平面内进行定位和定向,移动关节用于完成末端执行器在垂直于平面的运动[1]。
该机器人大量用于装配印刷电路板和电子零部件,可以伸进有限空间中作业然后收回,适合于搬动和取放物件。
图1所示为实验室闲置的SCARA 机器人的外观图,由于年久失修,该机器人控制器基本报废,因此需要对机器人控制系统进行改造,使得机器人恢复基本功能。
SCARA 机器人控制器大多采用专用控制器或“PC 机+运动控制卡”[2],其优点在于功能模块集成程度高,程序语言严谨,但是这种控制器开放性较差,而且价格偏高。
基于PLC的机械手控制设计
基于PLC的机械手控制设计本文主要介绍了基于PLC的机械手控制设计。
随着现代制造技术的不断发展,机械手在工业生产中的应用越来越广泛,机械手控制系统的控制方式也在不断更新迭代。
本文提出了一种基于PLC控制机械手的新型控制方案。
1.机械手的基本原理机械手是一种基于电气、电子、机械、气动等多种技术相结合的智能机器人,其通过伺服电机、减速器、编码器等组件,实现了对各类物品的精准抓取、搬运、插入、安装等功能。
机械手控制系统一般由PLC、传感器、驱动模块等组成。
2.PLC的基本原理PLC(可编程控制器)是一种基于逻辑控制的自动化控制系统,主要由CPU、存储器、输入/输出模块、通信模块等组成。
通过编写PLC程序,可以实现对各类自动化设备的控制和管理。
(1)PLC编程设计程序编写是PLC系统中最重要的部分,这里以三轴机械手为例,可以将机械手运动分解成若干个基本的运动要素:横向、竖向、旋转。
通过PLC程序让机械手根据场景要求完成一系列的运动需求。
(2)PLC输入输出配置PLC输入/输出配置是设计控制系统时非常重要的部分。
基于PLC的机械手控制系统,输入/输出模块可以通过编程实现对机械手的控制。
需要根据机械手控制系统对应的型号、规格、要求等,对PLC输入/输出模块进行配置。
(3)硬件选型与安装本文实现的基于PLC的机械手控制,需要选择适合的硬件设备完成组装,并进行布线和安装。
(4)系统调试和优化在完成硬件组装和软件编程后,需要对整个机械手控制系统进行调试和优化。
主要是通过测试各项运动功能是否符合预期要求、能否按时完成任务等。
(1)控制精度高:PLC的控制精度高,支持对伺服电机进行精准控制,可以保证机械手运动精度。
(2)程序编写灵活:PLC编程可以根据生产实际需求,灵活定制机械手的各个运动要素及相应动作。
(3)易于维护:PLC控制系统将整个机械手控制系统设备集成在一起,为运维和维护带来便利。
(4)可实现远程监控:PLC控制系统可以通过网络连接实现远程监控,实时获取机械手的运行状态和运动参数。
基于PLC的电气自动化控制系统设计
基于PLC的电气自动化控制系统设计1. 引言1.1 背景介绍电气自动化控制系统是现代工业生产中十分重要的一部分,它可以有效提高生产效率、降低成本、提高产品质量和可靠性。
随着科学技术的不断发展,人们对电气自动化控制系统的要求也越来越高,迫切需要一种能够更灵活、更可靠、更智能地实现控制的技术工具。
随着PLC(可编程逻辑控制器)技术的不断成熟和普及,它在电气自动化控制系统中的应用也越来越广泛。
PLC具有高度可靠性、强大的逻辑处理能力、灵活的编程方式、便于使用和维护等优点,使其成为电气控制系统设计中的首选方案。
本文旨在对基于PLC的电气自动化控制系统设计进行深入探讨,从PLC的概念和特点、电气自动化控制系统的基本原理、PLC在电气自动化控制系统中的应用、PLC的选型与配置以及PLC控制程序设计等方面展开详细介绍。
通过本文的研究,可以更好地了解PLC在电气自动化控制系统中的作用,为实际工程应用提供参考和指导。
1.2 研究意义电气自动化控制系统作为现代工业生产中不可或缺的重要组成部分,其设计与应用已经成为工程领域中的研究热点。
通过对电气自动化控制系统的研究,可以提高生产效率,优化生产流程,降低人力成本,提高产品质量,减少生产安全风险等方面的好处。
随着技术的不断发展和进步,电气自动化控制系统在各个领域的应用也越来越广泛,相关研究的意义与价值也日益凸显。
PLC作为电气自动化控制系统中的核心控制设备,具有高度可靠性、灵活性强、适应性广等优点,在工业控制领域得到了广泛应用。
对基于PLC的电气自动化控制系统的设计与研究具有重要的意义。
通过对PLC的概念、特点、应用等方面进行深入分析,不仅可以帮助工程师更好地理解和掌握PLC在电气自动化控制系统中的作用机制,同时也能够为工程实践提供更合理、更高效的解决方案。
对基于PLC的电气自动化控制系统的设计研究具有重要的理论与实践意义。
1.3 文献综述文献综述部分主要对国内外关于基于PLC的电气自动化控制系统设计的相关研究进行总结和分析。
基于PLC的电气工程自动化控制设计
基于PLC的电气工程自动化控制设计摘要:电气工程自动化应用广泛,特别是当前工业生产下电气设备数量不断增多,自动化、智能化技术也不断提高,这对自动化控制设计提出更高的要求。
文章对PLC技术的原理进行分析,探讨PLC技术应用优势进行分析,探讨PLC技术下自动化控制策略。
关键字:PLC技术;电气工程;自动化;电气控制引言PLC技术在当前行业发展过程当中的应用范围非常广,并且这项技术在应用中能体现出诸多优势,具有较强的实用性,近几年来,电气工程领域发展速度越来越快,因此人们对于技术设备方面有了更高的要求,PLC技术就能有效提高工作的效率。
减少工作人员的劳动力。
为了能够更好的去发挥出这项技术的应用效果,相关企业需要加强对PLC技术的学习和研究,从而实现电气控制自动化水平的提升。
1PLC技术的原理概述PLC(可编程逻辑控制器)技术是工业自动化中一个广泛使用的电气控制技术。
它的基本原理是通过对输入输出信号进行逻辑运算和处理,实现对电气设备的控制。
PLC系统通常由中央处理器、输入输出模块、通信模块、电源模块等组成。
中央处理器是整个系统的核心,它负责接收输入信号、进行逻辑运算和处理,并生成控制信号。
输入输出模块则用于将外部信号转换为数字信号,以便中央处理器进行处理。
通信模块则用于与其他设备进行通信,以实现对整个系统的监控和控制。
电源模块则提供电力支持,保证整个系统的正常运行。
在PLC系统中,输入和输出信号是系统的核心。
输入信号用于检测外部环境的状态,例如传感器信号、按钮信号等;输出信号则用于控制外部执行器的行为,例如电机、气缸、蜂鸣器等。
PLC系统通过对输入信号进行逻辑运算和处理,最终实现对输出信号的控制和调节。
每种编程方式都有其独特的特点和适用场景,可以根据具体应用场景进行选择和使用。
总之,PLC技术的应用非常广泛,可以用于自动化生产线、机器人控制等领域。
因为PLC系统具有模块化、可编程、可扩展、可靠性高等优点,所以在现代工业控制中得到了广泛的应用。
基于PLC的焊接机器人控制系统设计
基于PLC的焊接机器人控制系统设计扬州大学广陵学院本科生毕业设计毕业设计题目基于PLC的焊接机器人控制系统设计学生姓名专业班级指导教师完成日期摘要焊接机器人作为工业机器人应用的一个重要领域,对提高企业的工作效率、提升产品质量、降低企业的生产成本等方面都有着非常重要的意义。
根据焊接机器人的控制需要,设计了基于PLC的焊接机器人控制系统。
焊接机器人控制系统是焊接机器人的核心部分,它是机器人控制柜和主控制柜以及夹具操作台之间通讯的桥梁,它可控制伺服的启动、暂停、旋转速度等,从而控制夹具翻转;可控制机器人和夹具之间的联动,使焊接动作能够自动的运行,并且能实现任意的暂停再启动和紧急停止再启动。
系统经过调试,联系焊接样件可知,本课题所设计的控制系统能良好的运行,适应各种环境干扰,能够较为准确的沿着示教的轨迹进行焊接,而且焊接质量达到了产品的质量要求。
关键字:焊接机器人、控制系统、PLC、伺服控制AbstractWelding robot as an important field of industrial robot applications, to improve the efficiency of enterprises, improve product quality, reduce the production cost of enterprises have a very important significance. According to the control of welding robot, designed a welding robot control system based on PLC. Welding robot control system is the core part of the welding robot, it is a bridge of communication between the robot control cabinet and main control cabinet and the jig operation platform, it can control servo motor start, pause, such as rotation speed, so as to control the fixture turnover; can control the robot and the linkage between the clamp, welding operation can be run automatically, and can realize any pause and restart and emergency stop and restart. The system after the debugging, the contact welding sample, control system designed by this paper can run in good, adapt to various environment interference, can accurately along the teaching track welding, and welding quality meets the quality requirement of products.Key words:Welding robot、control system、PLC、servo control目录第一章绪论 (1)1.1 引言 (1)1.2 焊接机器人的国内外研究现状 (1)1.3选题背景和意义 (2)1.4课题的主要研究内容 (3)第二章焊接机器人 (4)2.1 焊接机器人的组成 (4)2.2 焊接机器人的分类 (4)2.3 焊接机器人的常用控制方式 (7)2.4 焊接机器人的应用 (8)2.5 焊接机器人的发展趋势 (9)第三章控制系统 (10)3.1 伺服控制系统 (10)3.1.1 伺服控制系统的概述 (10)3.1.2 伺服控制系统的机构组成 (10)3.1.3 伺服控制系统的技术要求 (11)3.2 PLC控制系统 (11)3.2.1 PLC控制系统的概述及其特点 (11)3.2.2 PLC的基本结构及其分类 (13)3.2.3 PLC的型号选择 (20)3.2.4 PLC的性能指标与发展趋势 (24)3.2.5国内外PLC产品简介 (26)第四章硬件电路的设计 (28)4.1 PLC的选取 (28)4.2元器件的选择 (33)4.2.1断路器的选择 (33)4.2.2继电器的选择 (34)4.2.3 交流接触器的选取 (35)4.3 PLC的主控柜接线图 (37)第五章软件设计 (38)5.1 I/O的分配 (38)5.2 触摸屏的设计 (40)5.2.1 HMI的概述 (40)5.2.2 触摸屏画面的设计 (42)5.3 伺服控制 (47)5.4梯形图 (49)5.4.1程序梯形图见附录 (53)第六章系统安装与调试 (54)6.1引言 (54)6.2 焊接机器人的系统安装于调试 (54)6.2.1 焊接机器人的系统安装 (54)6.2.2 焊接机器人的调试 (54)6.3 机器人焊接实验 (55)6.3.1 焊接机器人的焊接实验 (55)6.3.2 焊接机器人实验及其结果分析 (58)6.4 小结 (59)第七章总结 (60)参考文献 (61)致谢 (62)第一章绪论1.1 引言焊接时一种将材料永久连接起来,成为具有给定功能的结构的制造技术。
基于PLC的电气自动化控制系统设计

基于PLC的电气自动化控制系统设计摘要:基于PLC技术的不断更新和发展,传统电气自动化控制系统需要花费大量的人力、物力和财力,难以实现电气自动化控制完整可靠性,为此提出基于PLC技术的电气自动化控制优化系统设计。
基于PLC技术的可靠性,以及运行稳定性,制定电气自动化控制优化原则,在满足电气自动化控制优化原则的前提下,进行电气自动化控制优化系统的输入、输出电路设计。
关键词:PLC技术;电气自动化;控制优化;系统设计;随着我国工业自动化水平不断提高,对电气自动化控制系统提出更高的要求,基于PLC技术的不断快速发展。
传统控制系统的弊端不断凸显,其需要花费大量的人力、物力和财力,难以实现运行控制的统一性和运行可靠性[1],为此提出基于PLC技术的电气自动化控制优化系统设计。
传统电气自动化在生产中存在工作效能较低和运行可靠性指数较小的不足,为此提出PLC技术在电气自动化中的应用。
PLC技术作为一种最新研发的技术,基于PLC技术的新优势,对电气自动化中的控制开关量逻辑、控制模拟量、数据处理以及集中性对系统控制进行应用。
使电气自动化的工作效率、整体运行稳定性不断提高,同时降低系统运行时产生的能耗。
使电气自动化不断向着智能化、人机一体化、集成化、设备一体化方向发展。
进一步提升电气自动化水平。
1.PLC技术工业自动化水平是衡量国家经济生产力水平的关键性标准,在这个过程中,工业自动化模式的发展,有利于促进国民经济的健康、可持续运作。
随着科学技术的不断创新及应用,电气自动化系统已经成为工业发展体系的关键构成部分,该系统实现了对计算机技术、网络技术等的应用,自动化控制器是该技术系统的核心部件。
在实践工作中,PLC自动化控制系统实现了对处理器、电源、存储器等设备的结合性应用,通过对各个设备应用功能的结合,有利于提升自动化控制系统的运作效率。
在这个过程中,电源设备是该系统正常运作的基础,一旦电源设备不能正常发挥其功能,就会导致控制系统停滞的状况。
基于PLC技术的电气自动化控制优化系统设计

《装备维修技术》2021年第13期基于PLC技术的电气自动化控制优化系统设计孔祥盛 (广东明华机械有限公司连南分公司,广东 清远 511500)摘 要:随着PCL技术的不断发展和更新,以往电气设备所采用的自动化控制系统对人力、物理和财力有着大量的要求,无法对电气设备进行完整、可靠的自动化设置,因此,本文以PCL技术为基础,对电气设备系统的自动化控制进行了优化设计。
通过对可靠、稳定的PCL技术的应用,为电气设备提供了更优的自动化控制,以此为前提,在优化后的电气自动化控制系统中设计了输入电路和输出电路。
根据实验数据能够得知,与以往的控制系统相比,优化后的控制系统提升了48.14%的可靠性。
能够更加安全、可靠的自动控制电气设备。
关键词:PCL技术;电气自动化;控制优化;系统设计由于工业自动化在我国的水平得到了不断提升,因此电气控制系统加大了对自动化技术的要求,特别是电力能源,其与人们的生活有着密切的关系,目前,人们工作生活的方方面面都涉及到了电气工程,因此自动化控制在电气工程中的重要性日益凸显。
在实现自动化电气工程后,电气工程整个行业都得到了提升和发展,使相关事故在电工程行业的发生得到了减少,使电气工程具备了更高的效率,并且为人们带来了更高品质的生产生活。
所以,针对目前的电气工程行业来说,在实际控制电气设备的过程中,通过对自动化技术的应用,能够极大的促进行业的发展,有着十分重要的意义。
1 PLC控制系统的工作原理和系统设计1.1工作原理在对工业生产进行控制的过程中,PCL控制系统发挥出了极大的优势,在具有存储功能的设备中,能够对编写完成的程序代码进行存储,然后,由程序对数据进行采集和计算,中央处理器以集中的形式对其进行处理后,程序进入运行状态,同时,由机械设备中的软件对其进行控制,机械设备在接收到软件发出的指令后,能够按照规定的流程进行操作和加工。
PLC自动控制系统所具备的自动控制功能,能够对人工操作进行提点,从控制和操作方面,对人力资源进行了节省,并且,能够对更多的产品进行加工,有着较强的适用性,可以使生产更加精细和高效,实现高难度的成产,工业化生产阶段对其的应用,能够给控制工作带来极大的优势[1]。
基于PLC的ABB工业焊接机器人控制系统设计
图2过零检测逻辑原理
图1基于PLC的白车身焊接Robot控制系统框图
①焊接自动化水平高、降低焊接工位劳动强度、节约人力成本;
②控制系统能够精确控制和监控焊接电流和时间,可适用于不同型号汽车零部件的焊接;
③伺服电机具有较好的反应速度和控制精度,焊接可靠性高;
④焊点的位置、质量等一致性高,确保车身的焊接品质。
参考文献:
[1]邢行,马永力.基于PLC 的汽车自动焊控制系统设计[J].南
昌工程学院学报,2018,37(04):96-99.
[2]罗淼,巩虎军,金书骋.基于Profinet 的ABB 机器人与S7-300信号交互[J].电气自动化,2018,40(03):109-111.
[3]丁姝慧.基于PLC 的白车身焊接机器人控制研究[J].现代信息科技,2019,3(12):157-161.
[4]垚潘锟,刘波.基于S7-200PLC 的汽车后桥焊接专机控制系统[J].机械设计与制造工程,2015,44(01):62-65.
[5]宋欣欣,徐教礼,李盛,等.基于PLC 的白车身焊接机器人图2软件程序流程图
图3HMI 人机界面示意图。
基于PLC的机器人控制智能系统设计—-毕业论文设计
基于PLC的机器人控制智能系统设计—-毕业论文设计简介本文旨在设计一种基于可编程逻辑控制器(PLC)的机器人控制智能系统。
通过该系统,机器人能够实现复杂的自主运动和任务执行,提高工作效率和生产能力。
目标本论文设计的目标包括:1. 设计一个基于PLC的机器人控制系统,能够精确控制机器人的运动和动作;2. 提供一个用户友好的界面,使操作者能够轻松输入指令和监控机器人的状态;3. 实现机器人的自主导航和自动避障功能,以提高机器人的自主性和安全性;4. 验证系统设计的可行性和有效性,通过实际测试和性能评估。
方法本论文采用以下方法设计基于PLC的机器人控制智能系统:1. 确定机器人的控制要求和功能需求,包括运动范围、动作规划和交互能力等;2. 设计PLC的硬件结构,选择适合机器人控制的控制器和传感器;3. 开发控制系统的软件,实现对机器人运动和动作的控制;4. 设计用户界面,使操作者能够方便地输入指令和监控机器人的状态;5. 实现机器人的自主导航和自动避障功能,通过传感器数据和算法实现;6. 进行系统测试和性能评估,验证系统设计的可行性和有效性。
预期结果通过本论文设计的基于PLC的机器人控制智能系统,预期实现以下结果:1. 实现精确控制机器人的运动和动作,提高机器人的工作效率和生产能力;2. 提供用户友好的界面,方便操作者输入指令和监控机器人的状态;3. 实现机器人的自主导航和自动避障功能,提高机器人的自主性和安全性;4. 验证系统设计的可行性和有效性,通过实际测试和性能评估。
结论本论文设计基于PLC的机器人控制智能系统,旨在提高机器人的自主性和工作效率。
通过实现精确控制、用户友好界面以及自主导航和自动避障等功能,该系统具有广泛的应用前景和市场价值。
基于PLC的机器人电气控制系统设计

研发设计 I R E S E A R C H D E S I G N摘要:PLC是计算机技术与传统控制技术深度融合后形成的新技术,其在工业机器人控制中也得以广泛应用,对于提升工业机 器人控制水平具有积极的作用。
基于PLC的机器人电气控制系统设计具有系统性和复杂性,在设计的过程中须准确把握设计的 核心要点。
文章从P L C技术的发展概•况、机器人软硬件设计和工业机器人控制P L C技木的应用三个方面介绍基于P L C的机器人 电气控制系统设计。
关键词:P L C;计算机技禾:机器人电气控制;系统设计I基于PLC的机器人电气控制系统设计■文/王圆星郭洪月陈鹏李洪谊近年来,随着我国科学技术的不断进步,机器人在专用 机床和自动化生产线上得到了较大范围的应用,其能够搬用 和装卸零件,推动生产自动化建设。
本文主要介绍了 PLC 技术的发展概况、机器人软硬件设计和工业机器人控制PLC 技术的应用,以期为专业人员提供参考。
1.P L C概述1. 1PLC技术的特点PLC技术与其他控制技术相比存在十分明显的差异。
工 业机器人控制中是结合工业机器人动作开展自动化编程的过 程,其作用的有限性较为明显,寿命不长,需要消耗大量的 能源。
计算机控制技术若想发挥自身作用,则对环境提出了 十分严格的要求。
计算机结构的精度较高、复杂性较强、维 护的难度较大。
PLC技术融合了上述控制系统的特点和优势,具备计算机系统的存储功能,也可在内存盘中记录控制系统 的操作流程,之后由半导体电路配合与控制。
虽然与计算机 操控系统相比,PLC技术的作业能力存在一定的缺陷,但是 该系统的稳定性优势更为明显,且维护相对便捷,在复杂的 工业现场控制中得以广泛应用。
1.2PLC技术的发展现状PLC技术与工业机器人的深入融合,能够更好地体现 PLC技术的特点和优势,在工业机器人控制中也十分普遍。
P LC技术在工业机器人控制中的多个环节均发挥着极为关键 的作用,其也是工程施工中最为重要的核心内容,如顺序控 制、开关控制等,是工程控制中的重要基础。
基于PLC的机器人控制系统设计
基于PLC的机器人控制系统设计摘要:本文设计了一种基于PLC的机器人控制系统,该系统由机器人控制器、机器人执行器、传感器、信号调节器与主机等组成。
在系统设计中,我们运用了PLC编程语言进行控制逻辑的编写,并采用了开放式机构的机器人执行器,提高了机器人的可操作性和灵活性。
实验结果表明,该系统具有高效稳定、响应迅速、相容性好、操作简单等特点,为实现机器人技术的应用与推广提供了一定的参考价值。
关键词:PLC;机器人;控制系统;程序设计;开放式机构一、绪言近年来,机器人技术得到了越来越广泛的应用,对于提高生产效率和缓解人力短缺等方面都发挥着不可或缺的作用,能够广泛应用于工业生产、医疗卫生、农业生产、教育研究等领域。
然而,机器人的应用离不开合理、高效、安全、稳定的控制系统,而作为一种智能控制技术,可编程逻辑控制器(PLC)正逐渐成为机器人控制系统的主要控制装置。
本文从PLC技术的角度出发,针对机器人控制系统的需求进行研究和设计,主要包括控制系统的硬件构造和软件开发。
控制系统硬件构造主要包括机器人控制器、机器人执行器、传感器、信号调节器与主机等部分,控制系统的软件开发则采用PLC编程语言进行编写,实现逻辑控制。
二、PLC编程PLC编程是一种用于数字逻辑控制的专业编程语言,主要用于工业自动化控制领域。
PLC编程语言支持多种控制模式,具有易操作、高效稳定等特点。
本文采用PLC编程语言进行控制系统的编写,实现机器人的逻辑控制。
三、控制系统硬件构造机器人控制器:机器人控制器是机器人控制系统中的核心部分,可通过PLC编写逻辑控制程序,将程序直接加载到机器人控制器中,完成对机器人的控制。
本文采用的机器人控制器为PLC自动化控制器,可支持多种通信接口,方便与其他设备对接和控制。
机器人执行器:机器人执行器是实现机器人动作的执行机构,本文选择了一种开放式机构,即可随意改变机器人形态和尺寸,提高机器人的灵活性和可操作性。
另外,机器人执行器具有高质量材料、高耐用性、高精度等特点,可保证机器人执行动作的准确性和稳定性。
基于PLC的电机控制系统设计

目录目录 (1)第一章绪论 (3)1.1研究背景及意义 (3)1.2相关技术简介 (3)1.2.1变频器的应用与发展概况 (3)1.2.2 PLC技术 (5)1.3本文设计的主要内容 (6)第二章变频调速原理 (6)2.1变频器基本结构 (6)2.2 变频调速的基本原理 (7)2.3 变频调速的优点 (10)第三章 PLC技术 (12)3.1 PLC概述 (12)3.2 PLC的组成及各部分作用 (12)3.3 PLC的工作原理 (15)第四章实验系统的设计 (17)4.1系统设计功能分析 (17)4.2 PLC和变频器的选择 (17)4.2.1SIMATIC S7-200介绍 (17)4.2.2 SIMATIC MICROMASTER420变频器性能介绍 (21)4.3 闭环系统设计 (22)4.3.1 系统硬件设计 (23)4.4 多段速控制设计 (28)4.4.1 硬件设计 (28)4.5软件设计 (30)4.5.1 编程软件介绍 (30)4.5.2闭环程序设计 (31)4.5.3 多段速程序设计 (34)第五章实验调试和数据分析 (36)5.1 闭环系统 PID参数整定 (36)5.2 多段速控制分析 (38)第六章总结与体会 (38)参考文献 (39)致谢 (39)第一章绪论1.1研究背景及意义调速系统快速性、稳定性、动态性能好是工业自动化生产中基本要求。
在科学研究和生产实践的诸多领域中调速系统占有着极为重要的地位特别是在国防、汽车、冶金、机械、石油等工业中,具有举足轻重的作用。
调速控制系统的工艺过程复杂多变,具有不确定性,因此对系统要求更为先进的控制技术和控制理论。
可编程控制器(PLC)可编程控制器是一种工业控制计算机,是继续计算机、自动控制技术和通信技术为一体的新型自动装置。
它具有抗干扰能力强,价格便宜,可靠性强,编程简朴,易学易用等特点,在工业领域中深受工程操作人员的喜欢,因此PLC已在工业控制的各个领域中被广泛地使用。
基于PLC控制的机器人自动化生产线设计

基于PLC控制的机器人自动化生产线设计机器人自动化生产线是一种先进的制造生产方式,其可以实现机器人对生产过程的自动控制和操作。
本文将介绍一种基于可编程逻辑控制器(PLC)控制的机器人自动化生产线的设计。
我们需要了解PLC的基本原理和功能。
PLC是一种专用于工业自动化控制系统的控制器,它以可编程的方式实现了对不同设备的控制和监测。
PLC控制器具有丰富的输入输出接口,可以与各种传感器、执行器和其他设备进行连接和通信。
在机器人自动化生产线中,PLC可以实现对机器人的运动控制、工作模式切换、传感器信号处理等功能。
在机器人自动化生产线的设计中,需要考虑以下几个方面:1. 机器人选择:根据生产线的需求,选择适合的机器人类型和规格。
常见的机器人类型包括:多关节机器人、协作机器人、移动机器人等。
根据生产过程的要求,确定机器人的自由度、载重能力、操作精度等参数。
2. 传感器选择:生产线中的传感器用于感知环境和监测机器人的状态。
根据需要选择适合的传感器类型,如:视觉传感器、力传感器、位移传感器等。
传感器可以实时采集数据,并通过PLC进行处理和决策。
3. PLC编程:根据生产线的工艺流程,编写PLC的控制程序。
PLC控制程序包括输入输出配置、逻辑控制、运动控制等功能模块。
在编写程序时,需要考虑不同设备之间的协调和同步,保证整个生产线的稳定运行。
4. 通信和数据处理:生产线中的不同设备之间需要进行数据交互和通信。
PLC可以通过以太网、串口等方式与其他设备进行通信,实现数据的传输和共享。
PLC还可以将采集到的数据进行处理和分析,用于生产线的监测和调优。
5. 安全保护:在机器人自动化生产线中,需要考虑人机交互的安全性。
通过在PLC程序中设置相应的安全防护逻辑,可以保证机器人在工作过程中的安全性。
设置急停开关、光幕安全检测等。
机器人自动化生产线的设计需要综合考虑机器人的运动控制、工作协调、数据通信等多个方面,在PLC控制器的支持下,实现各个设备之间的协同工作和自动化控制。
谈基于PLC的机器人自动控制系统设计

谈基于PLC的机器人自动控制系统设计摘要:在现代科学技术不断发展的背景之下,工业生产所涉及到的重体力劳动量不断提升,因此为了良好的完成相关工业生产作业任务,就需要通过对机器人装置的研究与应用来实现。
基于PLC的机器人装置主要采取关节式结构,能够模拟人体手臂部分的活动动作,在自动控制系统下的预定程序、轨迹、以及要求作用下,实现包括零部件抓取、搬运、以及装配在内的一系列动作。
关键词:PLC;机器人;自动控制系统设计1.PLC控制工业机器人系统的功能机器人被广泛应用在专用机床及自动化生产线上,主要被用来搬取以及装卸零件,以实现生产的自动化。
基于PLC的机器人自动控制系统是现今提出的一个机器人控制探究方向,考虑PLC的主要原因是PLC的可调整性以及可控制性较强,是采用编程、输入指令的方式控制,操作相对简单,运行复杂性较低,安全性稳定性相对较高,基于PLC编程基础下的机器人自动控制系统设计结果直接具备PLC的优势,实用性较高,操作要求较低,运行连续性以及运行可靠性高,这对于机器人自动控制系统的进一步发展较为有利,有实际的促进作用。
2.基于PLC的工业机器人系统设计要点2.1控制系统硬件设计基于PLC的机器人装置包括抓取、搬运、以及装配在内的一系列动作均需要在气缸驱动作用之下实现。
而电磁阀部件作为控制气缸驱动动作的最主要部件,通过操作开关(以按钮开关或者是定位开关)的方式来实现。
在整个机器人装置结构当中,通常设置有两个工作台。
在操作过程中,被加工工件自初始位置达到1#工作台,将待操作工件传输至2#工作台,进而再次回到1#工作台,完成对下一工件的操作。
机器人装置自初始位置,手腕向下移动,操作手指夹紧1#工作台上待操作的工件,进而对其进行上行移动。
到位之后,机器人手指、手腕在手臂引导下沿右侧轨迹移动,移动至预定位置后再次沿下行轨迹移动,最后控制机器人装置手指放松,并将该工件放置于2#工作台当中。
再次回到1#工作台的动作顺序与上述流程相反,进而实现一个完整的工作周期循环。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于 PLC 的机器人电气控制系统的设计
发表时间:2018-04-02T11:55:00.723Z 来源:《红地产》2017年7月作者:侯跃云
[导读] PLC 是专为工作环境条件较恶劣的工业应用而设计的,其可以控制各种自动化应用。
1 PLC 技术概述
1.1 PLC 技术的结构可编程逻辑控制器,其实质是一种专门用在工业控制领域的计算机,它的主要结构基本与微型计算机基本相同,PLC 技术的结构为:电源,PLC 的电源对整个系统的正常工作起着非常重要的作用。
假如没有可靠、良好的电源为其供电,PLC 是无法工作的,因此制造商是非常重视对可编程逻辑控制器的电源的设计制作;中央处理单元 (CPU),中央处理单元 (CPU) 是 PLC 的控制中心,主要是以扫描的方式收发现场各输入设备的状态和数据,然后分别存入 I/O 映象区,再读取程序进而控制相应设备;存储器,主要分
为存放系统软件的系统程序存储器和存放应用软件的用户程序存储器;输入输出接口电路,输入接口电路用于连接 PLC 与现场控制的接口界面,输出接口电路集成了选通电路、数据寄存器和中断请求电路;功能模块,如计数、定位等;通信模块。
1.2 PLC 技术优势 PLC 技术在维护机械运转和数字化运算方面具有一定的优势,能结合传统继电技术,确保互联网和自动化结构符合常规性技术标准。
技术本身具有一定的价值优势,能在推动工业进程的基础上,维护工业生产的精简效果。
PLC 作为现代化工业中较为重要的项目结构和管理器件,整体管控结构的实效性价值十分关键,能在优化整体机械工程与自动化项目效率的同时,确保相关技术结构的优势得以发挥出来。
首先,PLC 技术操作性较高,多数 PLC 技术能有效支持相应的程序进行语言的互译管理,确保用户能有效掌握相关语言结构和模式,进一步提升应用效率。
并且,结合自动翻译功能的 PLC 技术也能为用户后续操作提供较为有效的保障。
需要注意的是,正是由于互译优势,在实现 PLC 技术编程的同时,也能减少外部处理的难度,集中简化了系统的整体结构问题,优化改善工作效率。
提升了 PLC 技术实用价值的过程中,借助统一国际标准通信协议,能为差异化厂家进行 PLC 技术互换提供坚实的保障,促进实践水平和处理效果的维护程度。
在整合调试操作水平的同时,也为提升 PLC 产品通信开放度提供了保障。
其次,PLC 技术设备体积小且能耗较少,在 PLC 技术装置结构中,由于集成电子线路的应用价值和整体处理水平,能在安装管理工作发挥实际水平的同时,确保相关处理结构和应用体系最优化,尺寸在 10 厘米以下时,PLC 技术设备中重量会在 150g 以下,确保消耗功率的维护程度贴合实际。
最后,PLC 技术抗干扰能力较强,在实际管理机制和整合措施统筹升级的基础好上,要对相关工艺流程的运行结构予以分析。
因此,结合 PLC 技术的界面管理水平对现场总线体系和 PLC 技术界面处理进行统筹整合,维护通信保障体系的实效性,也为后续工作中电磁、电路以及可靠性处理工作顺利完成提供保障。
2 基于 PLC 的机器人电气控制系统的设计要点
2.1 总体结构及流程设计系统的控制要求是实现方形和圆形玻璃的定尺寸打磨,即要求驱动流水线横向运动的电动机 M1 在达到设置尺寸后停止运动,光电编码器与横向运动电动机 M1 同轴连接,电动机的水平驱动位移与光电编码器的脉冲数输出成比例关系,光电编码器的输出与 S7-200CPU 的高速计数器输入相连接,利用高速计数器实时计算光电编码器输出脉冲数,通过计算即可测量出横向运动的长度。
组态实现长度宽度尺寸的设置和显示功能,人机界面将设置的相关参数传递给 S7-200CPU 的寄存器,执行用户程序计算当前横向移动距离和设置值的关系,打磨机构根据限制尺寸实现打磨,待打磨完成后,电动机 M3 驱动打磨机构实现纵向位移,光电编码器测量纵向位移的尺寸,当设置尺寸和测量尺寸相等时,垂直电动机 M2 驱动打磨机构垂直位移,行程开关限制垂直电动机行程位置,打磨机构垂直运动达到设置行程后,完成一次完整的控制任务,控制系统再次驱动电机进行流水线横向运动。
实现以上控制任务,控制系统应包括三大部分:主电路、控制部分和显示部分。
因此可以设计出控制系统的结构流程图。
系统结构流程图如图 1 所示。
图 1 系统结构流程图
2.2 电源电路设计在最机器人进行电气系统设计时,在设计的时候应考虑:安全性、经济性、可行性、外观及维修的方便性等。
电源电路是指全机器人的动力电路以及控制电路,主要包括:控制电路、电源电路、PLC 电源的开关电路以及动力电源转换回路。
控制系统主电源由空气开关控制,PLC 电源通断由启动按钮和继电器控制。
电源锁旋钮与启动按钮串联,当电源锁旋钮和启动按钮闭合,继电器的线圈得电,常开触点闭合,与启动按钮构成起一保一停控制回路,PLC 得电后开始循环扫描。
2.3 控制系统主程序设计
针对相应的控制要求,设计的 PLC 控制系统,通过组态人机界面完成对玻璃长、宽等参数的设置,利用 S7-200 系列 PLC 对台车电机、升降电机、进刀电机的运动控制。
为实现系统控制要求,完成控制任务,系统需要加入定时安全报警程序,即每一个动作启动时同时启动定时器,根据每个动作完成的时间设置定时器的定时时间,如果系统出现故障,定时时间到而未完成相应动作,停止后续动作,触发报警动作。
控制系统主要是为了完成玻璃定长定宽的打磨,主程序是控制电动机的设置长度和设置宽度的定尺寸打磨运动,主要完成下降、定宽、横向进给、定长打磨和上升运动。
在常用的梯形图设计方法中有经验设计法和顺序功能图设计方法,在此次主程序设计中采用顺序功
能图设计方法,全部用寄存器位来代表步具有概念清楚、编程规范、梯形图易于阅读和查错的优点。
利用以转换为中心的顺序控制梯形图设计方法,按照步及转换条件设计出主程序的顺序功能图如图 2 所示。
2.4 功能和性能参数轮式全向移动机器人系统的通信
功能和信息采集功能都是通过底层控制器来实现的,通信功能是通过 S7- 1200 的两个 PROFINET 接口分别与上位机或其他设备用普通网线相连实现,这里其他设备可以是另一个 PLC 的 CPU,如此可以为将来的功能扩展预留了途径;系统实现信息处理功能需要很多不同的数据,如电机编码器反馈的脉冲信息,底层控制器对收集到的信息数据进行整合,为控制机器人的自主或半自主运动提供数据依据。
参考文献:
[1] 王春 . 浅谈工业机器人的安全生产 [J]. 科技创新与应用 ,2016(34):109.
[2] 贾舒涵 . 结合电气工程和其自动化剖析机器人设计 [J]. 通讯世界 ,2016(05):233.
[3] 陈立新 , 郭文彦 . 工业机器人在冲压自动化生产线中的应用 [J]. 机械工程与自动化 ,2010(03):133-135.。