基于模糊神经网络的单路口智能控制方法
结合Q学习和模糊逻辑的单路口交通信号自学习控制方法
( 中山 大学 智 能 交通研 究 中心 广 东省智 能交通 系统 重点 实验 室 ,广 州 5 0 7 ) 1 2 5
摘 要 : 对城 市 交通 系统 的动 态性 和不确 定性 , 出 了基 于 强化 学 习的 信 号 交叉 口智 能控 制 系统 结 构 , 单 针 提 对
w s aa l o ol e erig ho g o bnt no B erl e o n la iga o tm utem r, u e a pbe f ni a n ruhacm iao f Pnuan t r adQ— r n l rh .F r r oe d e ot c n l n t i w k en gi h t h m l—bet e rpr ai s n l ot l hspprdvl e e adds nm to rQ l rigb sdo zy ut ojc v oe yi t fc i a cnr ,t a e ee p dar r ei ehdf — ann ae nf z i i p t n r f g o i o w g o e u
Q lann n zylgc — riga df z oi e u
H E Zh o— h n a c e g,SHE — Xi wei YANG e c e , W n— h n,CHEN ng nig Ni — n
( un dn r i il e aoaoyo t letTa sott nSs m, T e ac et , u a— n U i rt,G a gh u5 07 G ag ogPo n a K yL brtr I e i n rnpr i yt ISRs rhCne S nY te nv sy unzo 25,C ia vc f n l 10 —6 5 2 1 . 1 0 6 o:0 3 6 /.sa 0 1 3 9 .0 1 0 .5 s.
交通信号控制中的模糊控制应用
交通信号控制中的模糊控制应用在现代城市交通管理中,交通信号控制是优化交通流量、提高道路通行效率和保障交通安全的关键手段。
传统的交通信号控制方法往往基于固定的时间间隔或简单的逻辑判断,难以适应复杂多变的交通状况。
随着控制理论和技术的不断发展,模糊控制作为一种智能控制方法,在交通信号控制领域展现出了显著的优势和潜力。
模糊控制的基本原理是基于模糊集合理论和模糊逻辑推理,它能够处理和描述那些具有不确定性、模糊性和不精确性的信息和问题。
在交通信号控制中,交通流量、车辆速度、排队长度等参数都具有一定的不确定性和模糊性,例如“交通拥堵”、“车辆较多”等概念难以用精确的数值来定义,而模糊控制正好能够有效地应对这些模糊性。
模糊控制在交通信号控制中的应用主要包括以下几个方面:首先是交通流量的模糊感知。
通过安装在道路上的传感器,获取交通流量、车速等信息。
然而,这些传感器采集到的数据往往存在噪声和误差,并且交通状况本身也是动态变化的。
利用模糊控制的方法,可以对这些不精确的数据进行模糊化处理,将其转化为模糊语言变量,如“小流量”、“中流量”、“大流量”等,从而更准确地反映交通状况的本质特征。
其次是信号配时的模糊决策。
传统的信号配时方法通常基于固定的周期和绿信比,无法根据实时交通状况进行灵活调整。
而模糊控制可以根据模糊感知到的交通流量、车辆速度等信息,通过模糊推理规则,制定出灵活的信号配时方案。
例如,当交通流量较大且车辆速度较慢时,延长绿灯时间;当交通流量较小且车辆速度较快时,适当缩短绿灯时间。
再者是多相位交通信号的模糊协调控制。
在复杂的路口,往往存在多个相位的交通信号。
模糊控制可以综合考虑各个相位的交通需求,实现相位之间的协调控制,减少冲突和延误。
例如,对于相邻的路口,可以根据上游路口的交通状况,提前调整下游路口的信号配时,实现交通流的平稳过渡。
在实际应用中,模糊控制的实现需要建立合适的模糊控制器。
模糊控制器的设计包括输入变量的选择、模糊化方法的确定、模糊规则库的建立、模糊推理算法的选择以及输出变量的解模糊化等步骤。
基于神经网络的高速公路智能交通管理技术研究
基于神经网络的高速公路智能交通管理技术研究随着城市化的加速进程,人口的不断增长和经济的飞速发展,高速公路已经成为城市交通中不可或缺的一部分。
而随之而来的问题,则是高速公路拥堵、事故频发等交通安全问题。
为了解决这一系列问题,近年来,基于神经网络的高速公路智能交通管理技术得到了广泛的应用和推广。
本篇文章将着重分析和探讨这一技术的研究进展和应用实践。
一、神经网络与交通流量预测神经网络是一种模拟人脑神经元之间信息交互的数学模型,可以通过训练得到一些复杂非线性函数的近似解。
在交通流量预测中,神经网络模型被广泛应用。
通过历史流量数据对神经网络模型进行训练,模型通过学习历史数据的规律来预测未来的交通流量。
该方法主要有两种:前向网络模型和反向传播网络模型。
前者通过对输入数据进行加权和求和,生成输出结果。
后者则是通过通过多层神经元对一个误差函数进行逆向传播,将误差分摊到每一个神经元中,从而优化模型的参数和拟合效果。
二、神经网络与交通信号控制信号控制是交通管理中最为重要的一个环节,它直接影响着城市交通流量、路口通行能力以及行车安全。
在传统的信号控制方法中,往往是通过建立交通优化模型,寻找一个最优的控制策略。
然而,这种方法很难考虑到实际的交通需求和变化。
基于神经网络的交通信号控制方法,可以通过神经网络模型对信号灯周期进行自适应调整。
在这种方法中,神经网络将交通流量、速度以及车辆等待时间等信息作为输入,输出一个最适合当前交通需求的信号灯周期,从而保证了交通信号控制的合理性和有效性。
三、神经网络与车辆行为预测车辆行为预测是交通管理中非常重要的一个研究领域。
它可以帮助交通管理者预测车辆的行驶路线、速度以及目的地,从而更好的进行路网优化和信号控制。
神经网络在车辆行为预测中,也有很大的应用前景。
以高速公路为例,基于神经网络的车辆行为预测方法,可以通过对车辆轨迹、车速和加速度等数据进行分析和处理,从而预测出车辆的下一步行动。
这种方法可以提高车辆的安全性,避免事故的发生,并可以更好的进行路网优化和交通流量控制。
基于模糊神经网络和遗传算法的智能控制器

( 北京林业大学 ,北京 1 0 8 ) 0 3 0
摘 要:PD I控制算法简单、鲁棒性强,但其参数整定过程繁琐 ,整定时需要控制对象的精确数学模
型 ,而 且整定 往往 是针 对某一 种具 体工 况进行 的 ,缺乏 自学 习和 自适应 能 力。模 糊神经 网 络则兼 备了模糊逻 辑和神经 网络 的优点 ,具有函数 逼近功 能 ,具有较强 的自适应 、自学习能 力 、容错 能力和泛化 能力 。借助 于遗传算法对 全局 性参数进行优 化设计 ,借助于B 算 法对局 P 部性参数进行优 化 ,将模糊神经网络和遗传算法 引入PD I控制参数的整定过程 , 造出一种基 构 于模糊神经网络和遗传算法的智 ̄; D PI控制器。 关键 词 : PD I控制器 ;模糊神经网络 ;遗传算法
图2 采 用 智 能 PD控 制 器 的位 置 伺 服 系 统 I
NB NM
交 叉 概 率 和变 异 概 率 对 遗 传 算 法 的 收 敛 速 度 有 很 大 影 响 ,如 果 选 择 不 当 ,可 能 会 造 成 算 法 收
敛 过 程 缓 慢 ,甚 至 无 法 收敛 ,也 可 能 会 造 成 早 熟
系统 的过 渡 过 程 变 长 ,甚 至 出 现 振 荡 ;比例 因 子 选择 较 大 时 , 系统 的超 调 量减 小 ,比例 因子越 大 , 系统 的超 调量 就 越 小 ,但 系统 的 响 应速 度 会变 慢 ; 初 始 连 接 权 系数 选 的 较 大 时 ,可 以 减小 系统 的静
中图分类号 :T 3 H9 文献标识码 :A 文章编号 :1 0-0 ( 0 ) ( -0 0 - 3 9 14 21 5 下) 0 7 0 0 3 1
D i1 .9 9 Jis . o9 0 .O 1 5 下 ) o o : 3 6/ . n 1 o - 14 2 l .( .3 0 s 3
城市单路口交通信号两级模糊优化控制与仿真

与 VC + + 的混合编程技术构建交通信号两级模糊 在线优化控制 Paramics 仿真平台,并以典型城市单 交叉口进行实验,采用四种控制策略对案例进行大 量仿真,对提出的两种模型进行效用评价。
1 两级组合模糊控制模型
1. 1 建模理论分析
交通信号两级模糊控制器的性能受限于交通状
态变量的选择和控制器参数的合理设置。路口车辆
第 51 卷
城市交通信号多级模糊控制器综合考虑多维交 通状态影响因素,如排队长度、饱和流量和相位持 续时间等,可较准确地描述路口各相位交通流通行 需求的紧急程度,并通过分级分散处理状态变量可 避免状态变量间相互干扰; 同时,通过优化路口相 位顺序,可提高控制器性能; 仿真结果表明该方法 能有效减少延误、提高路口通过量,优于定时控制 等[1]。但其采 用 的 标 准 四 相 位 结 构 忽 略 了 右 转 等 非关键车流,在交通状况复杂的路口,对交通流的 波动响应不足; 在低饱和的交通状态下,因考虑多 维交通状态影响因素,致使路口交通状态弱化,多 级模糊控制器性能差; 而且,多级模糊控制器的多 参数采用经验知识确定,不具备学习功能[2]。
在两个方面:
1) 相位决策延长时间小,相位频繁切换致使
路口新增车辆通常要排队才能通过。
2) 红灯相位时间短而目标绿灯相位排队车辆
数少,致使新绿灯相位无车浪费绿灯时间现象严
重。
因而,两级模糊控制器状态变量的选取应与路
口交通状态直接关联,状态变量的选择取决于路口
交通状态特征,面向不同的交通状态,模糊控制器
选择相位交通强度作为交通状态变量; 采用基于交
通强 度 的 两 级 模 糊 控 制 ( Two-level Traffic Signal Control,TFTSC) [10]。组合模糊控制的概念模型用
基于神经网络的智能控制方法

基于神经网络的智能控制方法智能控制是近年来兴起的一种控制方法,它借助于神经网络的强大计算能力,能够对复杂的系统进行智能化的控制与决策。
本文将介绍基于神经网络的智能控制方法,并探讨其在实际应用中的潜力和优势。
一、神经网络简介神经网络是一种模拟人脑神经系统的计算模型,它由大量的神经元通过连接构成,能够对海量的信息进行高效的处理和学习。
神经网络具有自适应性、容错性和并行处理能力等特点,被广泛应用于图像识别、语音处理、自动驾驶等领域。
二、智能控制方法的基本原理基于神经网络的智能控制方法主要包括感知、决策和执行三个阶段。
感知阶段通过传感器采集系统的输入信号,并将其转化为神经网络可以处理的形式。
决策阶段利用训练好的神经网络对输入信号进行学习和判断,生成相应的控制策略。
执行阶段将控制策略转化为实际控制信号,通过执行器对系统进行控制。
三、基于神经网络的智能控制方法的优势1. 强大的学习能力:神经网络具有良好的自适应性和学习能力,能够通过大量的训练样本不断优化模型的参数,使之具备更好的控制性能。
2. 复杂系统的控制:神经网络可以对具有较高维度和非线性特性的复杂系统进行控制,能够应对更加复杂的实际场景和问题。
3. 实时性和适应性:神经网络能够在实时性要求较高的情况下对输入信号进行快速处理和决策,具备较强的适应性和反应能力。
4. 容错性和鲁棒性:神经网络在面对部分信息丢失或者噪声干扰时,仍能够保持较好的控制性能,具备较强的容错性和鲁棒性。
四、基于神经网络的智能控制方法的应用1. 智能交通系统:利用基于神经网络的智能控制方法,可以对交通流量进行实时监测和调度,达到优化交通流的效果,提高道路的通行能力和交通效率。
2. 工业自动化:神经网络可以应用于工业自动化领域中的生产线控制、设备故障预测等任务,提高生产效率和产品质量。
3. 智能机器人:通过神经网络实现智能机器人的导航、目标识别和路径规划等功能,使其具备更强的自主决策和执行能力。
基于模糊神经网络的单交叉口变相序控制
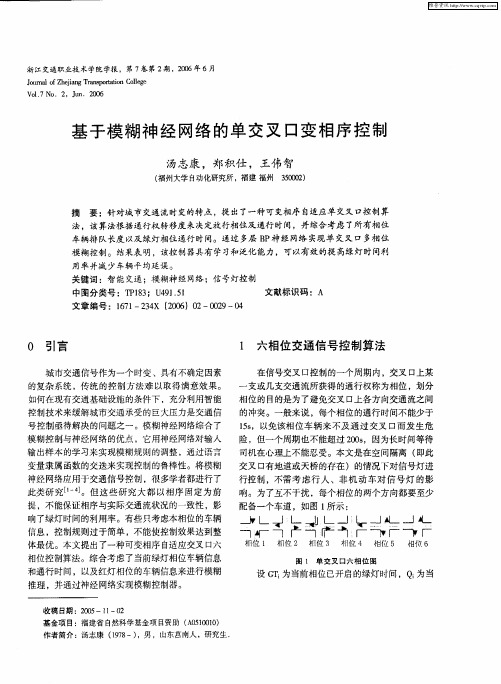
交叉 口 有地道或天桥的存在)的情况下对信号灯进 行控制 ,不需考虑 行人、非 机动车对 信号灯 的影 响 。为 了互不 干扰 ,每个 相 位 的两个方 向都 要 至少 配备一个车道 ,如图 1 所示:
# 。 r L ' - -
收 稿 日期 :20 一l 一0 05 l 2
1 六相位交通信 号控 制算 法
在信号交叉 口控制的一个周期内,交叉 口上某
一
支或几支交通流所获得的通行权称为相位 ,划分
相位的目的是为了避免交叉 口上各方向交通流之间 的冲突。一般来说 ,每个相位的通行时间不能少于 1s 5,以免该相位车辆来不及通过交叉 口而发生危 险,但一个周期也不能超过 20 ,因为长时间等待 0s
tl 等 待 ,需 设 定 一 个 最 长 红 灯 时 问 ,文 中 取 - ̄ ,- JJ
如何在现有交通基础设施的条件下 ,充分利用智能 控制技术来缓解城市交通承受的巨大压力是交通信 号控制亟待解决的问题之一。模糊神经网络综合了 模糊控制与神经网络的优点 , 它用神经网络对输入 输 出样 本 的学 习来实 现模 糊规则 的调 整 ,通 过语 言 变量隶属函数的交迭来实现控制 都进行了 此类研究【 l 这些研究大都 以相序 固定为前 卜4 。但 提,不能保证相序与实际交通流状况的一致性 , 影 响了绿灯时间的利用率。有些只考虑本相位的车辆 信息 ,控制规则过于简单 ,不能使控制效果达到整 体最优。本文提出了一种可变相序 自 适应交叉 口六 相位控制算法。综合考虑了当前绿灯相位车辆信息 和通行时间,以及红灯相位的车辆信息来进行模糊 推理 ,并通过神经网络实现模糊控制器。
步骤 2 给 i 位 以 最 短 的 绿 灯 时 间 G I 相 T=
基于SARSA(λ)算法的单路口交通信号学习控制
交通状态信 息动态进行决策 , 自动适应环境 以便取得 更好 的控 制效果 。由于 问题 状态 空间太 大而难 以直接存储 和
表示 。 采用径 向基 函数神经网络进行值 函数 近似 , 通过训练 自适应 非线性处理 单元 , 可达 到较好的近似 表示效果 , 解
决 了单个 十字交 叉路 口的交通信号控制 问题 。对该 方法进 行 仿真实验 , 果表 明其控 制效果 明显优于 传统 的固定 结
通流的变化具有较强的适应能力, 在控制效果上优于传统的固定配时控制策略 , 在状态空间和值 函数表示上
更简洁。
1 强化 学 习
.
强化学习( 增强学 习) 是一种 自 适应计算和机器学习方法 , 其原理是不需要问题的完整模型信息 , 智能体
收稿 日期 :0 8—0 20 4—2 9
配时控制策 略 。
关
键
词 :A S S 络 ; 交通信号 ; 学习控制
文献 标 识 码 : A
中 图分 类 号 : P 8 T 3 1 T 1 ; P 9
0 引 言
随着汽车拥有量和交通流量的急剧增长, 当前道路交通设施的使用 已到极限。从空间、 经济和环境等因 素考虑 , 继续扩张道路交通设施是不可能的事, 因此 , 在给定交通设施的条件下 , 如何去优化交通流有着重要 意义 。 城市交通路网的控制是一个非常复杂的问题 , 单个路 口是交通 网中最基本的结点, 它的交通信号控制是 路 网控 制 的基 础 , 决 好单路 口的交 通控 制问题 对解 决 整 个路 网的交 通 问题 具 有 重 大 的意 义 。传 统 的 固定 解 配时交通信号控制策略按照预设的信号周期和绿信 比进行信号控制 , 不考虑实时的车辆信息 , 所以无法适应 交通流的变化 , 有很大的局限性。为解决这一问题 , 国内外许多专家学者进行了深入细致 的研究 , 并取得 了 定的成果 。
利用人工神经网络的智能交通信号控制系统

利用人工神经网络的智能交通信号控制系统智能交通信号控制系统是利用人工神经网络技术为基础的一项重要技术,它能够有效地提高交通信号的灵活性和适应性,优化交通流量,减少交通拥堵,提高交通安全性。
本文将从智能交通信号控制系统的原理、应用和优势等方面进行详细介绍和分析。
智能交通信号控制系统基于人工神经网络的原理,通过学习、训练和演化,根据实际交通情况进行动态调整,确保道路交通的顺畅和高效。
其主要组成部分包括传感器、数据采集设备、神经网络模型、信号控制器以及相关的软件算法等。
传感器用于采集交通流量、速度和车辆类型等信息,然后将这些数据传输到数据采集设备中进行处理。
神经网络模型根据采集到的数据进行训练,学习交通流量和拥堵情况的规律以及信号控制策略。
信号控制器根据神经网络模型的输出结果,自动调整交通信号灯的时长和配时,以达到最佳的交通流量和通行能力。
通过这些部分的协同作用,智能交通信号控制系统能够实现智能化、自适应的交通信号控制。
智能交通信号控制系统的应用非常广泛。
在城市交通管理中,它能够根据实时的交通信息,自动调整交通信号灯的时长和配时,以适应交通流量的变化,并且可以根据交通拥堵情况,及时改变路口的通行策略,以减少交通拥堵和交通事故。
在高速公路和快速路等路段,智能交通信号控制系统可以实现车辆的高速无阻碍通行,提高道路通行能力和交通安全性。
此外,智能交通信号控制系统还可以应用于智能停车场、无人驾驶汽车等领域,为智能交通系统提供更全面的支持和服务。
与传统的交通信号控制系统相比,智能交通信号控制系统具有明显的优势。
首先,它可以根据实时的交通状况进行动态调整,适应交通流量的变化,提高道路交通的效率和安全性。
其次,采用人工神经网络技术,智能交通信号控制系统具有学习和演化的能力,可以不断改进和优化交通信号控制策略,提高交通系统的闭环控制能力。
第三,智能交通信号控制系统还可以与其他智能交通设备和系统进行联动,形成一个完整的智能交通系统,提供更全面的交通管理和服务。
神经网络在智能交通中的应用

神经网络在智能交通中的应用神经网络(Neural Network)是一种高效的人工智能技术,已被广泛应用于智能交通领域。
神经网络模拟人类大脑的工作方式,可以通过不断的训练来识别和分析数据,并根据数据进行决策。
本文将从神经网络在交通流预测、智能驾驶和交通信号控制三个方面探讨神经网络在智能交通中的应用。
一、交通流预测交通流预测是指预测某一区域内的车辆行驶情况,包括车辆的数量、速度和密度等信息。
神经网络可以通过历史数据来预测未来的交通流情况,从而为城市交通管理和规划提供科学的依据。
神经网络在交通流预测中的应用可以分为两种方式:前向预测和回归预测。
前向预测是基于当前时间之前的数据来预测未来的交通流;回归预测则是通过回归分析历史数据来预测未来的交通流。
前向预测适合于短期的预测,而回归预测则适用于长期的预测。
二、智能驾驶智能驾驶是指车辆自主感知、分析、决策并执行驾驶任务的能力。
神经网络可以通过模拟人脑的工作方式,对数据进行分析和判断。
这种技术已经被应用于自动驾驶汽车和卡车等汽车领域,同时还被应用于空中交通管制领域。
神经网络在自动驾驶汽车中的应用主要分为以下几个方面:感知、决策和控制。
感知是指汽车通过传感器收集车辆周围的信息,包括路面状况、障碍物和人行道等;决策则是根据感知到的信息对行驶的路线、速度和行动进行决策;控制则是根据决策结果来执行具体的驾驶任务。
在这些过程中,神经网络可以通过训练来提高车辆的识别能力和判断准确性,从而提高车辆的智能化。
三、交通信号控制交通信号控制是指通过控制路口交通信号灯的亮灭来指示交通流向。
神经网络可以通过对车辆和行人的监测来预测交通流,并根据交通流预测的结果来控制信号灯的亮灭,从而优化交通拥堵状况,提高交通效率。
神经网络在交通信号控制中的应用可以分为两个方面:统一控制和局部控制。
统一控制是指根据整个城市的交通流情况进行信号控制,对各路口的信号灯进行协调和整合;局部控制则是根据单个路口的交通流情况来进行信号灯的控制,优化路口的通行效率。
相邻交叉路口神经网络模糊协调控制的研究
Ke r s a jc n ne scin ;u z e rl ewok c odn t n c nrl s lt n y wo d :da e titre t s fzyn ua t r o r iai o t ;i ai o n o o mu o
t lspee t .I ti pp r h daet rfcit sci saecniee sal g cl ss m. r rsne n hs ae eajcn a i ne et n r o s rda a esa yt oi d t t r o d r e e T efs—l e cnrl e m ig nesc o n d s h ai o re i a i ieet i c h r —e l ot s v T s l it e t na daj t tert f en s g lndf rn dr ・ it v o ne r i us o g n f e- t n .T esc n lvl eem n s h eidadp ae i rn eo daetrfcit sc o s g i s h eo d~ ee d t ie ep r n h s df e c f jcn a ne et nui o r t o f e a ti r i n
0 引言
城 市道 路 交通 中 , 干道 往 往 承 受 着 巨大 的交 主 通 负荷 , 干道交 叉路 口的 交 通流 控 制 效 果 的好 坏 直 接影 响着 整个城 市 的交通状 况 。 由于交通 流具有 时
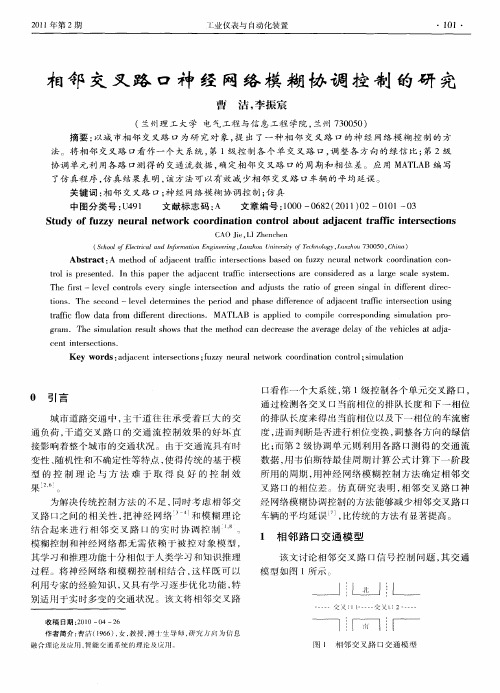
口看作 一个大 系统 , 1 控制 各个单 元交 叉路 口, 第 级
通 过检测 各交 叉 口当前相 位 的排 队 长度 和下 一相位 的排 队长度来 得 出肖前相 位 以及下一相 位 的车流 密
基于神经网络模糊控制的单交叉口信号控制

交通 信号控 制是 指通过 对城市 交叉路 口信号 灯 持 续时 问进行合 理 控 制 , 得 交 通 流_ 能够 高 效驶 使 1 ]
离路 口, 到疏导 改善交 通 流的 目的. 达 由于 交通流 系
网络 模糊 控制 可 以把模 糊控制 和神经 网络两 种技术 的优 点结合 起来 , 既可 以利用专 家 的经验知识 , 又具 有学 习逐 步优化 功能 , 别适 用 于 实 时 多变 的 交通 特 状况 , 其控 制效果 优于一 般 的智能控 制方案 ] .
S n l nt r e to i n lc n r lb s d o u z u a t r o r l i g e i e s c i n s g a o t o a e n f z y ne r lne wo k c nt o C AO i ,LIZ e -h n,REN i g Je h nc e Bn
统 的时变 性 、 随机 性 和不确 定性等 , 得传 统 的基 于 使 模 型 的 控 制 理 论 与 方 法 难 于 取 得 良好 的 控 制 效
果 [3 2. _ ]
1 单交叉路 口交通模型
进行相位变换. 以每个周期 内交叉 口的车辆平均延误作 为控制指标 , 来判断该控 制器 的控制性能. 计算机 仿真结果
表 明 , 方 法 能 够 降低 车辆 在 交叉 路 口的 平 均 延 误. 该
关键词 :神经网络模 糊控 制;排队长度 ;车流密度 ;仿真
中 图分 类号 : 2 3 TP 7 ;U4 1 9 文 献 标 识 码 :A
基于 神经 网络 模 糊控 制 的 单 交叉 口信 号 控制
曹 洁, 李振宸 , 任 冰
( 兰州理工大学 电气工程与信息工程学 院.甘肃 兰州 70 5) 30 0
图神经网络在智能交通中的应用案例分享
随着人工智能技术的不断发展和普及,图神经网络作为一种新兴的深度学习模型,在智能交通领域中得到了广泛的应用。
图神经网络以图为输入数据,能够处理非结构化数据,具有对复杂关系进行建模的能力,因此在交通流量预测、交通信号控制、智能驾驶等方面展现出了巨大的潜力。
本文将结合实际案例,探讨图神经网络在智能交通中的应用。
一、交通流量预测交通流量预测是智能交通系统中的重要组成部分,对于交通拥堵的缓解和交通信号的优化具有重要意义。
传统的交通流量预测模型往往只能考虑局部信息,无法充分利用道路网中不同交叉路口之间的关系。
而图神经网络能够利用道路网的拓扑结构,将交通拥堵问题视为图中节点之间的信息传递和交互过程,从而实现对整个道路网络的流量预测。
以某城市的道路网络为例,通过图神经网络可以将城市的道路网抽象为一个图结构,每个路口或者道路段可以看作是图中的节点,而节点之间的连接则代表了道路之间的关系。
利用图神经网络对这个图结构进行训练,可以学习到不同路口之间的交通流量关系,进而实现更加准确的交通流量预测。
通过对历史交通数据的学习和建模,图神经网络能够实现对未来交通流量的精准预测,为交通管理部门提供决策支持,帮助他们更好地规划交通流量调控策略。
二、交通信号控制交通信号控制是另一个重要的智能交通领域,通过合理的交通信号控制可以有效减少交通拥堵,提高交通效率。
传统的交通信号控制方法通常采用固定的时间间隔或者传感器检测的方法,难以动态调整信号灯的时长和频率。
而图神经网络在交通信号控制方面的应用,可以实现根据实时交通流量情况来动态调整信号灯的时长,从而优化交通信号控制策略。
以城市的路口信号灯控制为例,通过图神经网络可以将不同路口之间的交通流量关系建模为图结构。
图神经网络可以利用各个路口之间的交通流量来动态调整信号灯的时长,使得交通信号更加适应实时的交通情况。
通过对图结构进行训练和学习,图神经网络可以根据实时交通数据来预测未来的交通流量,从而调整信号灯的时长,实现交通信号的智能控制。
基于RBF神经网络的单交叉口自学习控制系统
m一州~一 m 删
O 前 言
由于城 市 化 速 度 的 加 快 , 动 车 保 有 量 的 迅 速 机 增加 , 现有 的设 施 、 路 , 别 是 城 市 道 路 交 叉 口 已 道 特 经很 难 适应 这 种 发 展 速 度 , 因此 对 城 市 交 叉 路 口交 通 灯 实 施合 理 优 化 控 制 , 高 交 叉 路 口的 通 行 能 力 , 提 对 改 善 城 市交 通 状 况 具有 很 大 的作 用 。 对 于 交叉 口的信 号 控 制 , 常 有 两 种 控 制 方 式 : 通 大 时 , 容 易 退 化 成 定 周 期 控 制 , 而 失 去 感 应 能 则 从
② 感 应 控制 。即 根据 布 置 在 交 叉 口传 感 器 检 测 到 的
车辆 排 队长 度来 设 置 控 制 方 案 , 应 控 制 在 当 车 流 感
量 较 小且 无 规 律 时 , 易 产 生 绿 时 分 配 不 合 理 的 现 容
象, 同样 也 会 降 低 路 口 的 通 行 能 力 。而 当 车 流 量 较
个 或 多个 ( 于 不 同 时 段 ) 制 方 案 , 种 控 制 方 法 用 控 这 在 交 通流 不 大 且 较 稳 定 的情 况 下 是 简 单 有 效 的 。 而 交通拥挤 且变 化 较大 时 , 时控 制 的效 果 比较 差 。 定
1 问 题 描 述
城 市 单 交 叉 路 口 的 交 通 流 , 图 1所 示 。 东 、 如 南 、 、 4个 方 向 , 个 方 向均 存 在 左 行 、 行 、 西 北 每 直 右 行 3个 车 道 车 流 。 考 虑这 个 十 字 形 的 平 面 交 叉 路 口具 有 四相 位 , 每个 相 位 对 应 的 车流 流 向 , 图 2所 示 。 如
网联环境下基于深度强化学习的单路口交通信号控制优化
16网联环境下基于深度强化学习的单路口交通信号控制优化网联环境下基于深度强化学习的单路口交通信号控制优化鄢Based on Deep Reinforcement Learning Optimization of Traffic SignalControl at Single Intersection龙顺忠1,2王志建1刘皓2,3(1北方工业大学电气与控制工程学院交通设备与控制工程系,北京100144;2中国科学院自动化研究所复杂系统管理与控制国家重点实验室,北京100190;3中国科学院大学人工智能学院,北京100049)摘要:深度强化学习能为交通信号控制研究带来诸多优化空间,它能够实现Agent与道路交通环境之间的交互,根据获得的惩罚或奖励不断地学习知识,从而更加适应环境。
研究主要是基于深度强化学习和SUMO仿真的方法,以从仿真的方式建立的智能网联车辆环境中得到单路口交通实时动态信息,并从中输出深度Q网络(DQN)算法所需要的重要参数。
基于搭建的深度神经网络,通过不断优化它的权重参数来提高性能,进一步实现对单路口交通信号控制方案的优化,并最终探索一个能够通过自主学习来高效控制单路口交通的信号控制方案。
关键词:深度强化学习;DQN算法;SUMO仿真;信号控制策略Abstract:Deep reinforcement learning can b ring a lot of optimization space for traffic signal control research.It can realize the interaction between agent and road traffic environment,and continuously learn knowledge according to the punishment or reward obtained,so as to adapt to the environment more.The research of this paper is mainly based on deep reinforcement learning and SUMO simulation method to obtain the real-time traffic dynamic information of single intersection from the intelligent network connected vehicle environment established by simulation,and output the important parameters required by the DQN algorithm.Based on the constructed deep neural network,the performance is improved by continuously optimizingits weight parameters,further realizing the optimization of singlea signal control scheme which can effectively control the trafficKeywords:deep reinforcement learning,DQN algorithm,SUMO1问题描述不确定性、随机性和自组织性一直以来就是城市道路交通信号控制系统的典型特征。
四种智能控制方法简述

第34卷第1期2018年3月金陵科技学院学报JOURNAL OF JINLING INSTITUTE OF TECHNOLOGY Vol.34, No.1Mar.,2018DOI:10.16515/ki.32-1722/n.2018.01.0007四种智能控制方法简述张艳,杨忠,司海飞(金陵科技学院智能科学与控制工程学院,江苏南京211169)摘要:主要介绍了四种常见的智能控制方法:专家控制、模糊控制、神经网络控制和基于遗传算法的优化控制。
分别阐述了这四种智能控制方法的原理、特色、应用范围、发展现状和趋势。
关键词:智能控制;专家控制(莫糊控制(申经网络;遗传算法中图分类号:TP18 文献标识码:A文章编号"672 - 755X(2018)01 - 0029 - 04O v e rv ie w o f F o u r T ypes o f In te llig e n t C o n tro l M e th o d sZHANG Y an,YANG Zhong,SI Hai-fei(Jinling Institute of Technology,Nanjing 211169, China)Abstract:Four types of common intelligent control methods are illustrated in this paper which contain expert control,fuzzy control,neural networks control and optimal control based on genetic algorithm.Respetively,their main ideas,characteristic,applications,present situation and tendency are overviewed.Key words:intelligent control;expert control;fuzzy control;neural networks control;genetic algorithm传统的控制方法包含了经典控制理论和现代控制理论。
基于FNNC的城市交通智能红绿灯控制系统
∑( u
n
i
× u n)
( 3) un
U =
E
i =1
∑
NB NM NS NB 110 018 016 NM 018 016 014 NS 016 014 012
EC
ZO 013 012 011 0 - 011 - 012 - 013
PS 0 0 0
PM 0 0 0
PB 0 0 0
式中 , u i 为第 i 条规则的隶属度 ; u n 为第 i 条规则 中 , 控制量 U 相应于 n 时的值 。 当第一层为输入层 , 第四层为输出层 , 中间各 层为隐层 。 设第 q 层 ( q = 1 , 2 , …, 4) 的神经元个 q q 数为 n q , 每层的输出为 x q p ( 其中 , x 0 = θ i) , d 为 输出的理想值 , 输入到第 q 层的神经元的连接权 系数为
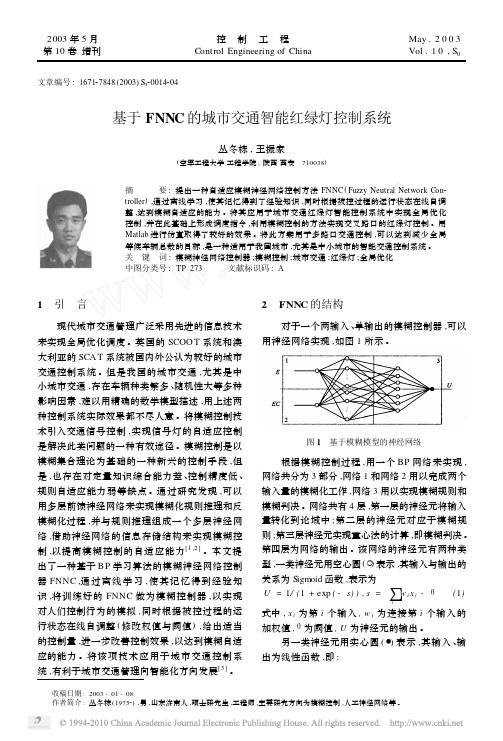
1 引 言
现代城市交通管理广泛采用先进的信息技术 来实现全局优化调度 。英国的 SCOO T 系统和澳 大利亚的 SCA T 系统被国内外公认为较好的城市 交通控制系统 。但是我国的城市交通 , 尤其是中 小城市交通 ,存在车辆种类繁多 、 随机性大等多种 影响因素 ,难以用精确的数学模型描述 ,用上述两 种控制系统实际效果都不尽人意 。将模糊控制技 术引入交通信号控制 , 实现信号灯的自适应控制 是解决此类问题的一种有效途径 。模糊控制是以 模糊集合理论为基础的一种新兴的控制手段 , 但 是 ,也存在对定量知识综合能力差 、 控制精度低 、 规则自适应能力弱等缺点 。通过研究发现 , 可以 用多层前馈神经网络来实现模糊化规则推理和反 模糊化过程 ,并与规则推理组成一个多层神经网 络 ,借助神经网络的信息存储结构来实现模糊控 制 ,以提高模糊控制的自适应能力
基于自适应神经模糊推理系统的智能化控制技术研究

基于自适应神经模糊推理系统的智能化控制技术研究随着科技的快速发展,智能化控制技术得到了广泛应用并取得了显著的成果。
在传统的控制方法基础上,自适应神经模糊推理系统(ANFIS)作为一种新型的控制方法,已经被广泛研究和应用于工业生产、汽车、机器人等领域,取得了良好的效果。
本文主要介绍ANFIS的原理及应用,探讨其在智能化控制中的优势和发展前景。
一、ANFIS的原理ANFIS是一种由模糊理论和神经网络理论相结合的自适应智能控制算法。
模糊推理是一种可以模拟人类语言思维的方法,适用于处理模糊信息和非线性问题;神经网络是一种能够自我学习和优化的计算模型,适用于处理复杂数据和高维空间的问题。
这两种计算模型的结合,使得ANFIS可以有效处理多变量、非线性、误差较大的复杂控制问题。
ANFIS的核心是基于模糊推理的自适应调节机制。
在ANFIS系统中,通过对已知输入输出样本进行学习和训练,建立输入变量与输出变量之间的映射关系,并确定各个输入变量的权值和模糊集隶属度函数。
这些权值和函数随着学习的进行实现自适应调节,从而达到更加精确和准确的输出结果。
二、ANFIS的应用ANFIS在智能化控制领域的应用广泛,例如:1. 工业生产控制ANFIS可以应用于流程控制、生产优化、质量控制等多个领域,提高工业生产的效率和质量。
例如在钢铁生产中,利用ANFIS控制系统对生产过程的影响进行分析和优化,可以降低烧结温度、减少气体排放,从而减轻环境污染。
2. 汽车控制ANFIS在汽车动力控制、防抱死制动系统、车身稳定控制等方面的应用,可以提高车辆的行驶稳定性和安全性。
例如,在雪地、湿滑路面行驶时,利用ANFIS控制系统对车速、刹车压力等参数进行实时控制,保证车辆行驶稳定、操控性安全。
3. 机器人控制ANFIS在机器人的控制、路径规划、姿态控制等领域应用广泛,提高了机器人的自主性和智能化水平。
例如,在机器人视觉系统中,利用ANFIS对图像识别和目标追踪进行优化,可以实现机器人的自主导航和操控。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
车辆平 均延误 是评 价交 叉 口服 务水 平 的重要指
标, 因此 , 它作 为 比较 各种 信号控 制方 法优 劣 的依 选 据。 车辆 的排 队长 度 和 车辆 平 均 到 达率 是 延 误 时 间 增 加 的主要诱 导 因素 。 文 以 △P, 本 ‘ )=P‘ 一P‘ 和 ’ 到达率 系数 口= 尺‘/ 作 为模糊 控制器 的输 人 , R 模糊 控 制器 的输 出 △e绿 时增 量 ) ( 对 作 实 时在线 调整, 以保证 系统 的实 时性 。
到达 的车 辆 总数 ; 为第 i 信 号周期 内第 f 相 p 个 个 位 中所 有方 向车流 的排 队长度 之 和 ; P为 一 个 训 练 周期 ( 个 信号 周期 组 成 )内 , 信 号周 期 内总 排 队 6 各
个处 于顶 层是 自学 习神 经 网络和一 个处 于底 层 的
模糊 控制 器组 成 , 统 运行 时分 别 完 成 自学 习 和控 系 制 的功能 。仿 真结 果 表 明 : 方 法 能 够 有效 地 提 高 该 相位 路 口的通行 能 力 , 制 效 果 明 显 优 于模 糊 控 制 控 方 法 , 有广 阔 的应 用前 景 。 具
夏 书 霞
( 坊 技 师 学 院 , 河北 廊 坊 o 5 o ) 廊 60 o
摘 要 :本文 采用人 工神经网络和模糊控制技术 ,结合各个车道 的到 车率 ,提 出一种全新 的智能交通 控制方法 。 仿真结果表明该方法控制效果明显 。 关键词 :到车率 ;B P神经 网络 ;模糊控 制 ;MA A AB仿真 TL 中图分类号 :T 2 3 P 7 文献标识码 :A 文章 编号 :17 —7 3 (0 0 0 —0 1 —0 63 9821)3 0 3 3
2
具 有 自学 习功 能的智 能控 制 系统结 构如 图 l 所
示
o否 z . , 则 =1 且有P ∑ p
∑P = 厂。
将 分为大 、 较大 、 小 和很小 5挡 , 中、 对应 的周 期 增量 AC分别为 1、、、、 , G+ +AC 0750 一5则 = 。 C 即为 下一 个训 练周期 将要 采 用 的新 信号 周 期 , 了方便起 见 , 简记 为 G。 为 仍
13 . 系统 的 整 体 设 计 思路
以保持现有神经网络的稳定性 , 阶段性地停止训练 , 也可 以继续 训练 下去 。
3 模糊 控 制器 的设计
3. 设 计 思 路 1
取各 训 练周期 结束 时的各 相位 的 _ 、 作 p C、 ‘ 为 神经 网络 的训练样 本 , 经过一 段 时间 的训 练 之后 ,
第 2 卷第 3 0 期 21 0 0年 6月
北华航 天工业 学院学报
J u nlo rh C iaI siueo rs aeEn o r a fNo t hn n ttt f AeoD c
Vo . 120 No. 3
J n. 01 u 2 0
基于模糊神经 网络的单路 口智 能 口均 有 左 转 、 行 、 右 转 其 直 和 3 车 道 , 相 位 组 织 为 相 位 1东 西 直 行 、 西 右 条 其 东 转 ; 位 2东西 左传 ; 相 相位 3 北直行 、 北右转 、 南 南 相 位 4南 北左 转 。
12 参数 定 义 .
O 引 言
假设所 研 究 的平 面交叉 口为 一个 十字形 交叉 路
近年来 , 国内外许多专家学者致力于开发新 的
交 通信 号控 制方法 , 工智 能是 新 的研 究 方 向之 一 , 人 这是 因为在 复 杂交 通 环 境 下 , 多 传 统控 制 方 法 的 许 效果 不甚 理想 , 人 工 智 能却 在 定 性 建模 和控 制 上 而
一
在 每 条 车 道 入 口停 车 线 上 和 停 车 线 的 上 游 10 5 m处安 装有 车辆 检测 器 , 测该 车道 的车辆 到 达 检 信息。
p 为第 i 个信号周期结束时的总排队 长度;l s J
为第 i 个信号周 个相位中所有方向放行的车辆总
数;: 为第 i d’ 个信号周期内第 个相位中所有方向
富有成效。然而, 当前 的交叉 口信号控制研究都集 中于基本 模糊 控制 技术 H 。 j 模糊控制规则一经确定就不在改变, 不具备实 时 自学习功能 , 这样一来 , 系统 的信号控制效果完全
依赖 于控制 规则 的合 理性 和遍 历 性 , 对 于 交 通 状 这 况复杂 的路 口, 特别 是 多相 位 路 口 , 很 难做 到 的 。 是 本 文提 出一种 全 新 的 信号 控 制 方 法 , 方 法 主 要 由 该
3 2 模 糊 集 的 定 义 .
使其模拟 ‘ 周期 c 、 和绿信 比 之间的函数关系 , 在网络运行时 , 以上个训练周期的 ‘ 作为神经 网 ’
络 的输 入 , 网络 的输 出为 前一 个 训 练 周期 的最 佳 平
均输 出 , 时性较 差 。 了弥 补 这一 不 足 , 文 采 用 实 为 本
1 系统 的总体 设计
1 1 简介 .
长度的平均值 ; ‘ 为一个训练周期结束时的 相 p _,
位总排 队 长度之 和 的平均值 , 有 则
p :z p 一s : ( : +d , ,为上个周期 ) p ) l
相 位 未清完 的车辆数 , 中括 号 内数 小 于 0 z= 式 时
图 1 系统 模 型 结 构 图
收 稿 日期 : 0 0—0 21 4—0 2
2 1 6月 0 0年
北华航天工业 学院学报
第2 0卷
另外 定 义 ‘ , 第 个 相 位 的平 均 到 车 率 , 为
尺 为 车 辆 最 大 到 车 率 ,到 达 率 系 数 a =
‘ R ; / 为绿 时增 量 。