stm32实验485实验
(完整word版)STM32的485最简单例程
485最基本的半双工通信配置采用STM32F103ZET6串口3连接485芯片通信口,485芯片的A,B通过485转串口模块与电脑相连,完成在串口软件上输入输出功能。
串口3,配置函数:void USART3_Config(void){GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE);// USART3_TX —> PB10 , USART3_RX —> PB11GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure。
GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure。
GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB,&GPIO_InitStructure);GPIO_InitStructure。
GPIO_Pin = GPIO_Pin_11;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);USART_ART_BaudRate = 115200; // 1200;USART_ART_WordLength = USART_WordLength_8b;USART_ART_StopBits = USART_StopBits_1;USART_ART_Parity = USART_Parity_No; //USART_Parity_Even;USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_InitStructure。
实验五 485实验

基于EIA-485总线的多机数据通信实验一、实验目的1.理解RS485串口通讯原理2.掌握RS485串口通讯硬件连接3.掌握基本的主从式通讯网络的搭建4.理解协议的概念5.掌握简单的协议的收发原理6.学会在ARM开发板上编写程序实现简单协议的收发二、实验设备硬件:RS485通信模块、EasyArm2200开发套件、实验连接跳线软件:ADS1.2集成开发环境三、实验原理1.RS485原理RS485采用平衡发送和差分接收,具有抑制共模干扰的能力,加上总线收发器具有高灵敏度,能检测低至200mV的电压,故传输信号能在千米以外得到恢复。
RS485的电气特性:逻辑“1”以两线间的电压差为+(2—6) V表示;逻辑“0”以两线间的电压差为-(2—6)V表示。
接口信号电平比RS-232-C降低了,就不易损坏接口电路的芯片,且该电平与TTL电平兼容,可方便与TTL 电路连接。
RS485采用半双工工作方式,一般只需二根连线,所以RS485接口均采用屏蔽双绞线传输,数据最高传输速率为10Mbps。
任何时候只能有一点处于发送状态,因此,发送电路须由使能信号加以控制。
RS485用于多点互连时非常方便,可以省掉许多信号线。
应用RS485可以联网构成分布式系统,其允许最多并联32台驱动器和32台接收器。
EasyArm2200开发套件上自带有RS232串口,所以需要使用扩展模块。
选用MAX485芯片,其引脚图如下:图1:MAX485接口引脚图其中各个引脚的功能如下:图2 EIA-485接口模块引脚说明其典型的组网连接图如下:图3 典型组网连接示意图其中电阻为120欧姆,并且将RE与DE相连,是为了更好的控制串口的收发,当ARM 的GPIO输出高电平时,处于发送状态,此时接收被禁止;反之亦然。
2.通讯协议所谓通信协议是指通信双方的一种约定。
约定包括对数据格式、同步方式、传送速度、传送步骤、检纠错方式以及控制字符定义等问题做出统一规定,通信双方必须共同遵守。
实验11:RS485通信
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOG,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_3; //RX-485
//串口输入
PA3
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;
*函数名
: rs485_init
* 函数功能
: IO 端口及串口 2,时钟初始化函数
*输 入
:无
*输 出
:无
*********************************************************************
**********/
void rs485_init()
我们 STM32 开发板上采用 SP3485 作为收发器,该芯片支持 3.3V 供电,最大传输速度 可达 10Mbps,支持多达 32 个节点,并且有输出短路保护。该芯片的框图如图所示:
图中 A、 B 总线接口,用于连接 485 总线。 RO 是接收输出端, DI 是发送数据收入 端, RE 是接收使能信号(低电平有效), DE 是发送使能信号(高电平有效)。
//使能
NVIC_Init(&NVIC_InitStructure);
}
2) 中断函数
void USART2_IRQHandler(void) //485 通信中断函数
{
static u8 k;
USART_ClearFlag(USART2,USART_FLAG_TC);
if(USART_GetITStatus(USART2,USART_IT_RXNE)!=RESET)//检查指定的
STM32综合实验
编号:《嵌入式原理及应用》实验报告实验项目:综合实验专业:电子信息工程学号:学生姓名:指导教师:时间批次:第13周星期7第4大节第4批次2020 年5月24日一、源代码详细注释#include "stm32f10x.h"#define Key1 GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_2)#define Key2 GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_10)unsigned char LCDBuffer[10]={""};unsigned char LCDBuffer2[12]={" LISONGLIN"};int msCounter=0;void SysTick_Handler(void)//--- systick中断函数---{msCounter++;}void DelaymS(int t){ int ta,tb;ta=tb=msCounter;while((tb-ta)<t){tb=msCounter;}}void Init_LCD_Pin(void)//初始化屏幕引脚、按键引脚、虚拟终端引脚{ GPIO_InitTypeDef MyGPIO;//定义结构体RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC|RCC_APB2Periph_GPIOB|RCC_APB2Periph_ GPIOA,ENABLE); //使能PC,PB端口时钟MyGPIO.GPIO_Pin=GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_4 | GPIO_Pin_5 |GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_13| GPIO_Pin_14 ;MyGPIO.GPIO_Speed=GPIO_Speed_50MHz; // I/O口频率50MhzMyGPIO.GPIO_Mode=GPIO_Mode_Out_PP;GPIO_Init(GPIOB, &MyGPIO); //使用MyGPIO参数初始化GPIOBMyGPIO.GPIO_Pin=GPIO_Pin_1 | GPIO_Pin_2 ; //选择引脚MyGPIO.GPIO_Speed=GPIO_Speed_50MHz; I/O口频率50MhzMyGPIO.GPIO_Mode=GPIO_Mode_Out_PP; //推挽输出GPIO_Init(GPIOA,&MyGPIO); //使用MyGPIO参数初始化GPIOAMyGPIO.GPIO_Pin=GPIO_Pin_10 | GPIO_Pin_2 ; //选择引脚MyGPIO.GPIO_Speed=GPIO_Speed_50MHz; I/O口频率50MhzMyGPIO.GPIO_Mode=GPIO_Mode_IN_FLOATING; //配置IO口为浮空输入模式GPIO_Init(GPIOC,&MyGPIO); //使用MyGPIO参数初始化GPIOC}#define RS_CLR GPIO_ResetBits(GPIOA,GPIO_Pin_2) //设置GPIOB.2输出0,等同PBout(2)=0#define RS_SET GPIO_SetBits(GPIOA,GPIO_Pin_2) //设置GPIOA.2输出1,等同PAout(2)=1#define EN_CLR GPIO_ResetBits(GPIOA,GPIO_Pin_1)#define EN_SET GPIO_SetBits(GPIOA,GPIO_Pin_1)//LCD1602写指令函数void LCD_Write_Com(unsigned char com)//写指令{ int i;for(i=0; i<1000; i++);GPIO_Write(GPIOB,(int)(com & 0x03)<<1 |(com&0x0c)<<2 |(com & 0x30)<<4 |(com & 0xc0)<<7);RS_CLR;EN_SET;EN_CLR;}//LCD1602写数据函数void LCD_Write_Data(unsigned char Data)//写数据{ int i;for(i=0; i<1000; i++);GPIO_Write(GPIOB,(int)(Data & 0x03)<<1 |(Data & 0x0c)<<2 |(Data & 0x30)<<4 |(Data & 0xc0)<<7); RS_SET;EN_SET;EN_CLR;}void LCD_Init (void) //LCD1602初始化函数{ int i;LCD_Write_Com(0x38);//设置成8位驱动,2行5x7点for(i=0;i<100000;i++);LCD_Write_Com(0x38);for(i=0; i<100000; i++);LCD_Write_Com(0x38);for(i=0;i<100000;i++);LCD_Write_Com(0x38);关闭光标LCD_Write_Com(0x08);//显示模式LCD_Write_Com(0x01);//不显示光标LCD_Write_Com(0x06);//清除显示for(i=0;i<100000;i++);LCD_Write_Com(0x0C);}void LCD_Write_Char(char x, char y, char Data)//显示字符{ if(0==y)LCD_Write_Com(0x80 + x);elseLCD_Write_Com(0xC0+x);LCD_Write_Data(Data);}long KeyCnt=0;void keyscan(){ unsigned char i;if(Key1==0){ DelaymS(10);if(Key1==0){ LCD_Write_Com(0x38);for(i=0;i<12;i++)LCD_Write_Char(2+i,0,LCDBuffer2[i]);}DelaymS(10);//时延}if(Key2==0){ DelaymS(10);if(Key2==0){KeyCnt++;}DelaymS(10);}if(KeyCnt==9999)KeyCnt=0;//返回}unsigned char LCDBuffer1[]={" KeyCnt=0000"};//虚拟终端初始化显示int main(void)//主程序{ unsigned char i=0;if(SysTick_Config(SystemCoreClock/1000)){while(1);}Init_LCD_Pin();LCD_Init();for(i=0;i<14;i++)LCD_Write_Char(i,1,LCDBuffer1[i]);for(i=0;i<10;i++)LCD_Write_Char(3+i,0,LCDBuffer[i]);while(1){ keyscan();if(KeyCnt/1000 >0)LCD_Write_Char(10,1,KeyCnt/1000 + '0');else LCD_Write_Char(10,1,'0');if((KeyCnt%1000)/100 >0)LCD_Write_Char(11,1,(KeyCnt%1000 /100) + '0');else LCD_Write_Char(11,1,'0');if((KeyCnt%100)/10 >0)LCD_Write_Char(12,1,(KeyCnt%100)/10 + '0');else LCD_Write_Char(12,1,'0');if(KeyCnt%10 >0)LCD_Write_Char(13,1,KeyCnt%10 + '0');else LCD_Write_Char(13,1,'0');}}二、程序流程图三、程序运行过程描述先定义中断函数和延时函数;后将屏幕引脚和按键引脚初始化,定义引脚功能,声明结构体,输出模式等参数等,定义虚拟终端输出引脚;再定义存储数据的寄存器,在寄存器中写入指令和数据;定义LED显示函数,信号初始化等,然后屏幕显示字符。
RS485通讯实验
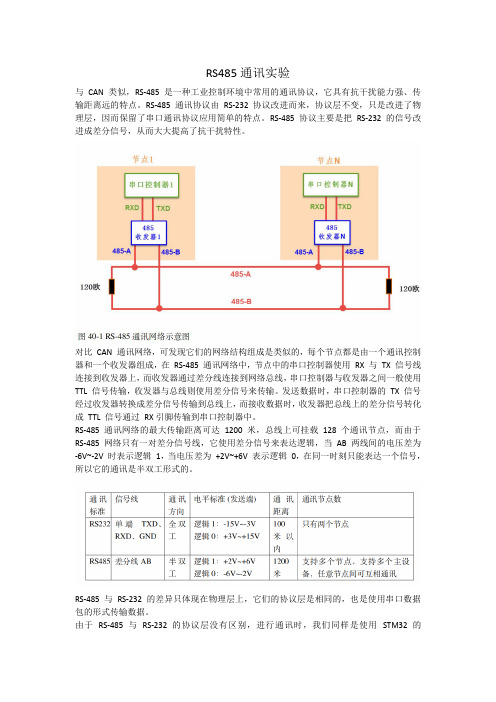
RS485通讯实验与CAN 类似,RS-485 是一种工业控制环境中常用的通讯协议,它具有抗干扰能力强、传输距离远的特点。
RS-485 通讯协议由RS-232 协议改进而来,协议层不变,只是改进了物理层,因而保留了串口通讯协议应用简单的特点。
RS-485 协议主要是把RS-232 的信号改进成差分信号,从而大大提高了抗干扰特性。
对比CAN 通讯网络,可发现它们的网络结构组成是类似的,每个节点都是由一个通讯控制器和一个收发器组成,在RS-485 通讯网络中,节点中的串口控制器使用RX 与TX 信号线连接到收发器上,而收发器通过差分线连接到网络总线,串口控制器与收发器之间一般使用TTL 信号传输,收发器与总线则使用差分信号来传输。
发送数据时,串口控制器的TX 信号经过收发器转换成差分信号传输到总线上,而接收数据时,收发器把总线上的差分信号转化成TTL 信号通过RX引脚传输到串口控制器中。
RS-485 通讯网络的最大传输距离可达1200 米,总线上可挂载128 个通讯节点,而由于RS-485 网络只有一对差分信号线,它使用差分信号来表达逻辑,当AB 两线间的电压差为-6V~-2V 时表示逻辑1,当电压差为+2V~+6V 表示逻辑0,在同一时刻只能表达一个信号,所以它的通讯是半双工形式的。
RS-485 与RS-232 的差异只体现在物理层上,它们的协议层是相同的,也是使用串口数据包的形式传输数据。
由于RS-485 与RS-232 的协议层没有区别,进行通讯时,我们同样是使用STM32 的USART 外设作为通讯节点中的串口控制器,再外接一个RS-485 收发器芯片把USART 外设的TTL 电平信号转化成RS-485 的差分信号即可。
RS-485—双机通讯实验本小节演示如何使用STM32 的USART 控制器与MAX485 收发器,在两个设备之间使用RS-485协议进行通讯,本实验中使用了两个实验板,无法像CAN 实验那样使用回环测试(把STM32USART 外设的TXD 引脚使用杜邦线连接到RXD 引脚可进行自收发测试,不过这样的通讯不经过RS-485 收发器,跟普通TTL 串口实验没有区别),本教程主要以“USART—485 通讯”工程进行讲解。
2-STM32串口通信实验

3、在工程属性的“Target” -> “Code Generation” 选项中勾选 “Use MicroLIB””。
Company Logo
STM32printf用法配置
在这里讲解一下fputc函数里面的代码,我们前面提到 过USART_SR寄存器的5、6、7三位,理解了这几位的 功能就可以大概理解串口是如何发送数据的了。
第二课 串口通信
LOGO
串口简介
串行接口简称串口,也成串行通信接口,是采用串行通 信方式的扩展接口。串口的使用对于开发调试过程的作 用是非常大的,串口可以用来查看、打印及输出相关信 息,使我们在嵌入式开发中最先与中央处理器通信的接 口。
串行通讯的特点是:数据位传送,传按位顺序进行,最 少只需一根传输线即可完成,成本低但传送速度慢。串 行通讯的距离可以从几米到几千米。
自行更改),数据位长度为8bit,停止位为1,无校验位。
在使用printf函数之前还需要进行一些操作。如果要 printf函数工作的话,还需要把printf()重新定向到串口 中,这部分工作是由fputc(int ch,FILE *f)这个函数来完 成的,这个函数在usart.c中实现。
Company Logo
1、开启串口时钟 2、设置相应I/O模式 3、配置波特率、数据位长度、奇偶校验位等
Company Logo
STM32串口原理图
Company Logo
STM32 UART库函数
Company Logo
STM32串口时钟使能
串口作为STM32的一个外设,其时钟由外设时钟使能寄存器控制, 串口1的时钟使能在APB2ENR寄存器,其他串口的时钟使能位都在 APB1ENR。(以串口1为例)
【STM32H7教程】第31章STM32H7的USART应用之RS485
【STM32H7教程】第31章STM32H7的USART应⽤之RS485第31章 STM32H7的USART应⽤之RS485本章教程为⼤家讲解USART应⽤之485总线。
虽然这⼏年⽆线⽹络的使⽤率有所上升,有线的串⾏⽹络仍然提供最有⼒、最可靠的通信,特别是在恶劣的环境中。
在需要抗噪、抗静电、抗电压故障的⼯业,建筑⾃动化领域仍然是有线通信的天下。
31.1 初学者重要提⽰31.2 RS485基础知识31.3 RS485硬件设计31.4 RS485驱动设计31.5 RS485板级⽀持包(bsp_uart_fifo.c)31.6 RS485驱动移植和使⽤31.7 使⽤例程设计框架31.8 实验例程说明(MDK)31.9 实验例程说明(IAR)31.10 总结31.1 初学者重要提⽰1. 学习本章节前,务必优先学习第30章,RS485⽤到的串⼝FIFO也是建⽴在30章的基础上。
2. 了解了本章31.2和31.3⼩节的基础知识后,强烈推荐看此贴的两个⽂档,对RS485讲解的⽐较透彻,中⽂版:。
3. STM32H7⽀持RS485的硬件流控制,即有⼀个专门的引脚来控制485 PHY的收发状态切换。
V7开发板⽤的USART3,需要⽤PD12来控制,⽽这个引脚要⽤于FMC,所以⽤的是⼀个通⽤IO。
4. 经常会有⽹友咨询为什么程序⾥⾯收发切换没有做延迟处理,这⾥就涉及到⼀个关键的知识点TXE发送空中断和TC发送完成中断的区别,详细看教程中说明即可。
31.2 RS485的基础知识背景知识(了解即可)智能仪表是随着80年代初单⽚机技术的成熟⽽发展起来的,现在世界仪表市场基本被智能仪表所垄断。
究其原因就是企业信息化的需要,企业在仪表选型时其中的⼀个必要条件就是要具有联⽹通讯接⼝。
最初是数据模拟信号输出简单过程量,后来仪表接⼝是RS232接⼝,这种接⼝可以实现点对点的通信⽅式,但这种⽅式不能实现联⽹功能。
随后出现的RS485解决了这个问题。
485通讯使用STM32串口DMA发送数据丢失字节的问题
STM32F10x单片机串口DMA发送485数据问题
开启串口DMA发送数据,使能DMA发送完成中断,实测进入DMA发送完成中断后,有两个字节数据并没有通过串口发送出去;使用485发送数据时,当在DMA发送完成中断中,使能485接收,会造成485传输丢失两个字节;现通过以下方法解决了该问题:
在DMA发送完成中断中,
首先判断串口发送寄存器空标志是否有数据未移入到移位寄存器可用while(!USART_GetFlagStatus( USART2, USART_FLAG_TXE));等待移
入完成;因该标志默认状态下为1,且数据由硬件移入,故不会造成死循环,个人认为;
再判断,串口发送完成标志是否是发送未完成状态,如果为发送未完成,开启发送完成中断;否则,使能485接收(该处未验证不确定);
在串口发送完成中断中,使能485发送。
实测可用;有不合理之处欢迎指教。
基于STM32智能电表设计
基于 STM32智能电表设计摘要:今年来,随着社会的发展时代的进步,人们平均收入的提高越来越多的家庭,用电设备的增加,有的家庭还在用老式电表,电器设备越来越多,用电负荷页越来越大,非常容易造成短路打火,而且还容易引发火灾,如何解决问题,成为了人们颇为关注的问题。
这个智能电表采用的是STM32F103VET类型的控制器为主控芯片,设计成为了一中组成十分简单,而且具有比较强的实用性的多能智能电表。
我在设计这个智能电表的过程中,采用的是把它们模块化的设计理念,其中智能电表的硬件有主控模块、电源转换模块、LCD段码显示模块、按键模块和RS485通讯模块。
软件部分包括主程序、系统初始化程序、电量处理程序、键盘中断程序以及LCD段码显示程序。
关键词:智能电表STM32F103 LCD RS4851.研究背景智能电表作为智能电网中重要的基础组成部分之一,也是实现智能电网的"神经末梢"。
以后电能表不再仅仅是一个简单的仪表独立使用,而是朝着智能化、模块化、系统化、网络化、环保化方向发展,同时也伴随着我国智能电网的大力发展,智能电表也具有很大的市场前景。
2.课题研究的内容本设计采用STM32F103VET型号的微控制器作为主控芯片,设计了一款组成简单、具有较强实用性的多功能电能表。
在设计电能表硬件和软件的过程中,均采用了模块化的设计思想。
系统主要包括的是硬件设计方案和软件设计方案两部分的内容,以下将进行具体介绍。
3.系统的硬件设计这个论文设计的是基于stm32智能电表的硬件设计,在这个设计的整体结构上主要由主控模块、电源转换模块、电流电压采样模块、lcd显示模块、RS485通讯接口模块、按键输出模块以及EEPROM存储模块组成。
智能电表的总体结果框架,如图1所示。
图1 系统框架图3.1主控电路的设计以型号为STM32F103VET的微控制器作为主控芯片, 电量计量的任务、显示和显示屏切换的功能以及RS485的通讯功能都需要在主控芯片内设计和进行。
第25讲 485通信实验
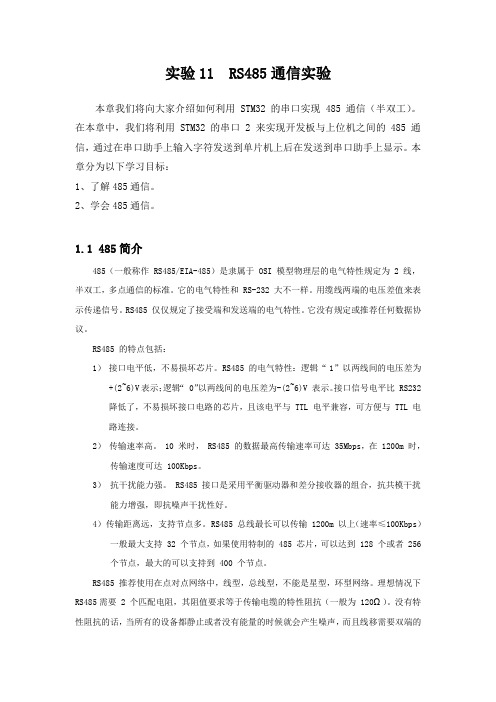
7.1RS-485总线收发实验7.1.1485简介485(一般称作RS485/EIA-485)是隶属于OSI(OSI:开放系统互连基本参考模型。
开放,是指非垄断的。
系统是指现实的系统中与互联有关的各部分。
)模型物理层的电气特性规定为2线,半双工,多点通信的标准。
它的电气特性和RS-232大不一样。
用缆线两端的电压差值来表示传递信号。
RS485仅仅规定了接受端和发送端的电气特性。
它没有规定或推荐任何数据协议。
RS-232在1962年发布,命名为EIA-232-E,作为工业标准,以保证不同厂家产品之间的兼容。
RS-422由RS-232发展而来,它是为弥补RS-232之不足而提出的。
为改进RS-232通信距离短、速率低的缺点,RS-422定义了一种平衡通信接口,将传输速率提高到10Mb/s,传输距离延长到4000英尺(速率低于100kb/s时),并允许在一条平衡总线上连接最多10个接收器。
RS-422是一种单机发送、多机接收的单向、平衡传输规范,被命名为TIA/EIA-422-A 标准。
为扩展应用范围,EIA又于1983年在RS-422基础上制定了RS-485标准,增加了多点、双向通信能力,即允许多个发送器连接到同一条总线上,同时增加了发送器的驱动能力和冲突保护特性,扩展了总线共模范围,后命名为TIA/EIA-485-A标准。
RS485的特点包括:1)接口电平低,不易损坏芯片。
RS485的电气特性:逻辑“1”以两线间的电压差为+(2~6)V 表示;逻辑“0”以两线间的电压差为-(2~6)V表示。
接口信号电平比RS232降低了,不易损坏接口电路的芯片,且该电平与TTL电平兼容,可方便与TTL 电路连接。
2)传输速率高。
10米时,RS485的数据最高传输速率可达35Mbps,在1200m时,传输速度可达100Kbps。
3)抗干扰能力强。
RS485接口是采用平衡驱动器和差分接收器的组合,抗共模干扰能力增强,即抗噪声干扰性好。
rs-485通信
4.本次试验的代码:main函数:int main(void){/* Configure the system clocks */RCC_Configuration();/* NVIC Configuration */NVIC_Configuration();/* Configure the GPIOs */GPIO_Configuration();/* Configure the USART1 */USART_Configuration();GPIO_SetBits(GPIOA, GPIO_Pin_8); //PA8是sp3485发送/接收控制端,这里先设置为发送(实现的功能就是上电之后STM32先向PC发送一个4和一个3)delay_ms(2);//稍稍延时一下,原因去查看sp3485的手册吧USART_ClearFlag(USART1,USART_FLAG_TC);//这一句很关键,如果没有这一句这个4会发送不成功或者发送错误的,//其实手册上讲了使能发送位后会发送一个无用的帧,所以那个帧发送完了这个//发送完成的标志位USART_FLAG_TC当然也被置位了。
USART_SendData(USART1, 4);while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);//上面清除了发送完成标志位,那么这里就可以等待发送完成标志位被置位来判断这一帧是否发完了USART_SendData(USART1, 3);while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);while(1){GPIO_ResetBits(GPIOA, GPIO_Pin_8);//现在把PA8清零,试试接收PC机发送过来的数据delay_ms(2);//稍稍延时一下,原因去查看sp3485的手册吧USART_ClearFlag(USART1,USART_FLAG_RXNE);//既然上面开始发送之前都将发送完成标志位清零,这里也将接收完成标志位清下零,就当是一个好习惯吧while(1){if(USART_GetFlagStatus(USART1,USART_FLAG_RXNE)==SET)//判断是否有一帧数据接收完成{buf[j++] = USART_ReceiveData(USART1); //接收完成的话就直接放到缓存区域里}if(10 == j)//接收完成10个之后就跳出去,不再接收了,有个意思就OK了break;}j = 0;//清零一下j变量,使得实验可以反复接收PC发过来的10个数据GPIO_SetBits(GPIOA, GPIO_Pin_8);//将sp3485设置为发送数据while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);delay_ms(2);//稍稍延时一下,原因去查看sp3485的手册吧for(i = 0; i < 10; i++){USART_SendData(USART1, buf[i]);//将数据依次发送出去while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);}}}注:在用STM32的串口做485通信的时候,发送数据的时候,检测到最后一个数据发送后的标志位已经置位,但是还不能立即失能485芯片的发送引脚,因为虽然标志位已经置位,485芯片的数据还没有完全发送出去,这个时候需要ms级别的延时,一般2个毫秒左右基本就没有问题了。
STM32串口实现485双机通信的原理
STM32 串口实现485 双机通信的原理
RS485 通信想必大家都知道,在学习RS232 时,都会拿485(RS485 下文就用485 代替)和其作对比。
485 优缺点不说,网上有。
我用的是STM32 库函数学的485 通信,所以接下来就讲讲STM32 串口实现485 双机通信的原理:
485 和232 都是基于串口的通讯接口,在数据的收发操作上都是一致的。
但是他两的通讯模式却大不相同~!232 是全双工(例:A->B 的同时B->A,瞬时同步)工作模式,而485 是半双工(发时不能收,收时不能发)工作模式。
在232 通信中,主机在发送数据的同时可以收到从机发过来的数据;但在485 通信中,收发要经过模式位的切换来进行,譬如,发送数据时,会把模式为置‘1’,表示为发送模式,此时不能接收;当接收数据时,会把模式位置‘0’,
表示为接收模式,此时不能发送。
在讲STM32 串口实现485 双机通信的原理之前,先来复习一下串口中的中断知识点:。
STM32的RS485通信
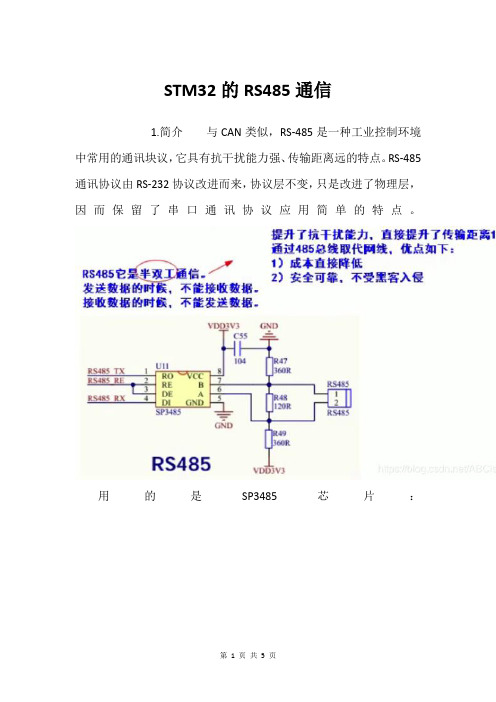
STM32的RS485通信1.简介与CAN类似,RS-485是一种工业控制环境中常用的通讯块议,它具有抗干扰能力强、传输距离远的特点。
RS-485通讯协议由RS-232协议改进而来,协议层不变,只是改进了物理层,因而保留了串口通讯协议应用简单的特点。
用的是SP3485芯片:通信的时候,A端口连接另一个设备的A端口,B端口连接B端口,不是交叉相连。
最多能够连接128个设备,所以在某种情况下可以取代网络,RE引脚用来控制通讯数据的方向,要么进行接收,要么进行发送。
本质还是串口通信RS485_RE为高电平的时候,DE为高电平有效,允许发送数据RS485_RE为低电平的时候,RE为低电平有效,允许接收数据所以当你要发送数据的时候,需要将与RE连接的引脚置为高电平、2.编码所以我们大致可以得到一个程序模板:发送数据函数void rs485_send(uint8_t *pbuf,uint32_t len) { //设置RS458为发送模式,将所连引脚设置高电平输出PGout(2)=1; //调用串口2的库函数发送数据... //延时100us delay_us(100); //设置RS485为接收模式PGout(2)=0;} 接收函数,使用中断接收void USART2_IRQHandler(void) { uint8_t data=0; if(USART2_GetITStatus(USART2,USART_IT_RXNE)!=RESET) data = USART2_ReceiveData(USART2);}下面是演示代码,供参考#include "stm32f4xx.h" #include "stm32f4xx_gpio.h" #include "stm32f4xx_rcc.h" #include "stm32f4xx_usart.h"//模式控制#define RS485_TX_ENPGout(8)//485模式控制.0,接收;1,发送. static GPIO_InitTypeDef GPIO_InitStructure; static USART_InitTypeDef USART_InitStructure; static NVIC_InitTypeDef NVIC_InitStructure;void USART1_Init(uint32_t baud) { RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//使能USART1时钟//串口1对应引脚复用映射GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1);//GPIOA9复用为USART1 GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1);//GPIOA10复用为USART1 //USART1端口配置GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //GPIOA9与GPIOA10 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//速度50MHz GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉GPIO_Init(GPIOA, //初始化PA9,PA10//USART1 初始化设置USART_ART_BaudRate = baud;//波特率设置USART_ART_WordLength = USART_WordLength_8b;//字长为8位数据格式USART_ART_StopBits = USART_StopBits_1;//一个停止位USART_ART_Parity = USART_Parity_No;//无奇偶校验位USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx;//收发模式USART_Init(USART1, //初始化串口 1 USART_Cmd(USART1, ENABLE); //使能串口 1 USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启相关中断//Usart1 NVIC 配置NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//串口1中断通道NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;//抢占优先级3 NVIC_InitStructure.NVIC_IRQChannelSubPriority =3;//子优先级3 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//IRQ通道使能NVIC_Init(//根据指定的参数初始化VIC寄存器}void USART1_WriteBytes(uint8_t *pbuf,uint32_t len) { uint32_t i =0; for(i=0; iDRUSART1_WriteBytes( } }。
stm32芯片资料
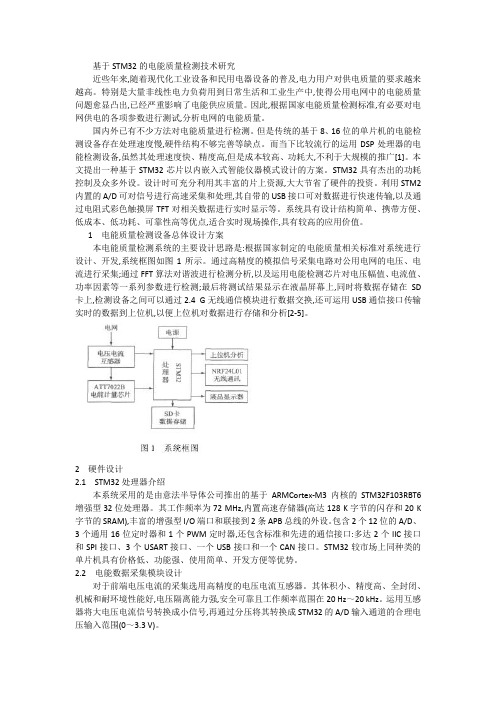
基于STM32的电能质量检测技术研究近些年来,随着现代化工业设备和民用电器设备的普及,电力用户对供电质量的要求越来越高。
特别是大量非线性电力负荷用到日常生活和工业生产中,使得公用电网中的电能质量问题愈显凸出,已经严重影响了电能供应质量。
因此,根据国家电能质量检测标准,有必要对电网供电的各项参数进行测试,分析电网的电能质量。
国内外已有不少方法对电能质量进行检测。
但是传统的基于8、16位的单片机的电能检测设备存在处理速度慢,硬件结构不够完善等缺点。
而当下比较流行的运用DSP处理器的电能检测设备,虽然其处理速度快、精度高,但是成本较高、功耗大,不利于大规模的推广[1]。
本文提出一种基于STM32芯片以内嵌入式智能仪器模式设计的方案。
STM32具有杰出的功耗控制及众多外设。
设计时可充分利用其丰富的片上资源,大大节省了硬件的投资。
利用STM2内置的A/D可对信号进行高速采集和处理,其自带的USB接口可对数据进行快速传输,以及通过电阻式彩色触摸屏TFT对相关数据进行实时显示等。
系统具有设计结构简单、携带方便、低成本、低功耗、可靠性高等优点,适合实时现场操作,具有较高的应用价值。
1电能质量检测设备总体设计方案本电能质量检测系统的主要设计思路是:根据国家制定的电能质量相关标准对系统进行设计、开发,系统框图如图1所示。
通过高精度的模拟信号采集电路对公用电网的电压、电流进行采集;通过FFT算法对谐波进行检测分析,以及运用电能检测芯片对电压幅值、电流值、功率因素等一系列参数进行检测;最后将测试结果显示在液晶屏幕上,同时将数据存储在SD 卡上,检测设备之间可以通过2.4 G无线通信模块进行数据交换,还可运用USB通信接口传输实时的数据到上位机,以便上位机对数据进行存储和分析[2-5]。
2硬件设计2.1STM32处理器介绍本系统采用的是由意法半导体公司推出的基于ARMCortex-M3内核的STM32F103RBT6增强型32位处理器。
微机原理STM32实验指导书

微机原理与接口技术STM32实验指导书V2.0龙岩学院物理与机电工程学院电子工程系2016.3实验一GPIO 模块实验一、实验目的1、学习S TM32 模块的G PIO 模块的配置2、学习S TM32 模块的输入输出功能的实验二、实验原理1 、S TM32 的 IO 口相比 51 而言要复杂得多,所以使用起来也困难很多。
首先S TM32 的IO 口可以由软件配置成如下8种模式:输入浮空、输入上拉、输入下拉、模拟输入、开漏输出、推挽输出、推挽式复用功能、开漏复用功能。
STM32 的每个 IO 端口都有 7 个寄存器来控制。
他们分别是:配置模式的 2 个 32 位的端口配置寄存器C RL 和C RH;2 个32 位的数据寄存器I DR 和O DR;1 个32 位的置位/复位寄存器 BSRR;一个16 位的复位寄存器B RR;1个32 位的锁存寄存器L CKR。
刚复位后,复用功能未开启,I/O 端口被配置成浮空输入模式STM32 的CRL 控制着每组 IO 端口(A~G )的低8 位的模式。
每个 IO 端口的位占用C RL 的4个位,高两位为C NF,低两位为M ODE。
这里我们可以记住几个常用的配置,比如0X0 表示模拟输入模式(ADC 用)、0X3 表示推挽输出模式(做输出口用,50M 速率)、 0X8 表示上/下拉输入模式(做输入口用)、0XB 表示复用输出(使用I O 口的第二功能,50M 速率)。
CRH 的作用和C RL 完全一样在固件库开发中,操作寄存器C RH 和C RL 来配置I O 口的模式和速度是通过G PIO 初始化函数完成:void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct);第一个参数是用来指定G PIO,取值范围为G PIOA~GPIOG。
第二个参数为初始化参数结构体指针,结构体类型为G PIO_InitTypeDef。
RS485指导书

实验二十七:柔性加工系统的485通信(实验一)熟悉485的网络一、实验目的1、利用上所学的PLC编程完成程序的编制及485的通信控制。
2、将所学的知识运用于实践中,培养分析问题、解决问题的能力。
3、熟悉N﹕N网建立的方法4、通过柔性加工系统的拼合,培养学生的动手能力,尤其是机械上的一些装配、调节能力以及程序的调试能力。
二、实验设备1、安装有WINDOWS操作系统的PC机(具有FXGPWIN软件)2、485通信模块7块及其连接线。
3、PC与PLC的通信电缆7根。
4、整套柔性加工系统。
三、实验内容1、首先构建485的通信网络,建立通信平台(中央控制台-自动传输站-三坐标测量站-CNC加工站-安装搬运站-拆卸分检站)后做如下操作:2、每站分别上电操作,任意点击一站的X20按钮将其置1时,各站的Y21灯开始闪动;再点击该站的X21按钮(其它站的X21不起作用)将其置1时,各站的Y20灯开始闪动;再点击该站的X23按钮(其它站的X23不起作用)将其置1时,各站的Y20,Y21灯开始同时亮;再同时点击该站的X20,X21按钮(其它站的X20,X21不起作用)将其置1时,各站的Y20,Y21灯同时灭。
3、在2的实验基础上,作些更改重新做,体会485控制的方法:每站分别上电操作,任意点击一站的X20按钮将其置1时,各站的Y21灯开始闪动;再点击任意一站的X21按钮将其置1时,各站的Y20灯开始闪动;再点击该任意一站的X23按钮将其置1时,各站的Y20,Y21灯开始同时亮;再同时点击任意一站的X20,X21按钮将其置1时,各站的Y20,Y21灯同时灭。
自己写顺序功能图体会一下?注:本实验需要团体合作来完成。
四、组建N﹕N网1、N﹕N的链接示意图2、主站点和从站点的设置3、设置主站点和从站点的程序4、各站点的软元件号分配:五、程序框图X26=1 M0等待命令 X20=1 M1 Y21灯闪 X21=1 M2 Y20灯闪 X23=1 M3 Y20,Y21灯闪 X20=1&&X21=1 M4 Y20=0,Y21=0返回M0将编制好的程序送入PLC ,运行通过,并将程序存盘。
4.8 STM32 RS485串口通讯及程序设计
版本号:V2.2
第 6 页 共 14 页
官方网站:
(众想)哈尔滨卓恩科技开发有限公司
STM32 开发板用户使用手册
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);//设置串口 2 时钟使 能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);//功能复用 IO 时钟使能
(众想)哈尔滨卓恩科技开发有限公司
STM32 开发板用户使用手册
语句 #ifndef、#endif 是为了防止 pbdata.h 文件被多个文件调用时出
现错误提示。如果不加这两条语句,当两个文件同时调用 pbdata 文件时,
会提示重复调用错误。
4.8.4.4 pbdata.c 文件里的内容是
#include "pbdata.h" //很重要,引用这个头文件
无论编写任何程序都要打开相关的时钟设置,在这个实验中用到使能
AHB 外设时钟有 3 各部分,分别是使能端口时钟、使能串口 2 时钟、使能端
口复用时钟。所有的外设时钟全部挂接在 AHB 后的两个预分频器上,初学者
一般都感觉在设置外设时钟时不知道怎样填写使能或使能外设时钟函数中
的“参数 1”,下表我列出了一些“参数 1”的固定书写格式,方便大家查
一个很成熟的电路,电路大家都熟悉了(参考原理图纸)。从图中可以看出
芯片 1#管脚是数据接收端,4#管脚是数据发送端;2#、3#管脚是发送/接收
状态转换控制端。
图一 RS485 通讯电路 4.8.4 软件设计
RS485 通讯程序中我们用到中断、端口复用功能等函数。我们采用 PA 端口进行串口通讯;PA2 端口接 TX,PA3 端口接 RX,状态转换控制线连接 PE5 端口。在这里我们也是全部使用库函数编写程序。 4.8.4.1 STM32 库函数文件
基于STM32处理器与Modbus485协议的主轴电机温控系统设计

2020年8月 第20卷 第4期无锡商业职业技术学院学报JournalofWuxiVocationalInstituteofCommerceAug.2020 Vol.20 No.4 收稿日期:2020 05 14作者简介:戴明(1978—),女,江苏兴化人,讲师,研究方向为信号处理与嵌入式应用;李军科(1972—),男,陕西岐山人,副教授,研究方向为电机控制;孟召议(1982—),男,江苏盐城人,实验师,研究方向为电子技术控制与测试。
基于犛犜犕32处理器与犕狅犱犫狌狊/485协议的主轴电机温控系统设计戴 明,李军科,孟召议(无锡商业职业技术学院,江苏无锡214153;江苏省无线传感系统应用工程技术开发中心,江苏无锡214153)摘 要:基于STM32处理器与Modbus/485协议设计主轴电机温控系统,实现电机温度实时采集、PC机上LabVIEW人机界面设计以及Modbus协议电机控制,利用LabVIEW实现电机温度的远程查询、显示、控制和保存,最终实现基于工业网络的智能控制。
关键词:STM32处理器;Modbus/485协议;主轴电机;温度;LabVIEW中图分类号:TP272 文献标志码:A 文章编号:1671 4806(2020)04 0107 06DesignofSpindleMotorTemperatureControlSystemBasedonSTM32ProcessorModbus/485Protocol犇犪犻犕犻狀犵,犔犻犑狌狀犽犲,犕犲狀犵犣犺犪狅狔犻(WuxiVocationalInstituteofCommerce,Wuxi214153,China;TheEngineeringTechnologyDevelopmentCenteronWirelessSensorSystemofJiangsuProvince,Wuxi214153,China)Abstract:ThetemperaturecontrolsystemofspindlemotorisdesignedbasedonSTM32processorandModbus/485protocol.Theembeddedplatformisusedtoacquirereal timemotortemperature,designLabVIEWhuman machineinterfaceonPCandcontroltheModbusprotocolmotorofthedriver.Lab VIEWisusedtorealizeremotequery,display,controlandsaveofmotortemperature,andfinally,anintelligentcontrolsystembasedonindustrialnetworkisrealized.Keywords:STM32processor;Modbus/485protocol;spindlemotor;temperature;LabVIEW 《中国制造2025》规划明确提出今后我国将逐步完成工厂的“智能制造”升级。