B+RS执行器调试手册
执行器调试作业指导书

目录一、编制依据 (2)二、作业任务 (2)三、作业准备及作业环境条件 (3)四、施工进度安排 (3)五、作业方法及施工要求 (3)六、作业质量标准及检验要求 (4)七、职业安全卫生与环境管理 (5)八、绿色工程管理措施 (6)九、强制性条文 (6)十、创优措施 (6)十一、应急预案 (7)执行器调试作业指导书一、编制依据1.1 《新疆电力设计院设计》1.2 《电力建设施工及验收技术规范》(热控部分)(DL/T5190.5-2004)1.3 《火力发电厂热工仪表及控制装置监督条例》(83)水电电生字第73号1.4 《热工仪表及控制装置检修运行规程》 (86)水电电生字第93号1.5 《火电工程调整试运质量检验及评定标准》 (DL/T5210.4-2009)。
1.6 《电力建设安全工作规程》(火力发电厂部分)1.7 《火力发电厂基本建设工程启动及峻工验收规程》1.8 《火电机组达标投产考核标准(2001年版)》1.9 《火力发电厂技术标准(计量标准)》。
1.10《热工技术手册》1.11 设计及制造厂家技术标准和要求及供货商产品说明书及相关技术图纸二、作业任务2.1 工程概况大唐呼图壁热电厂2×300MW工程,本工程由大唐集团建设,其中2号机组由湖北省火电二公司承担安装及单体调试工作,总体设计由新疆电力设计院设计。
锅炉由东方锅炉集团股份有限公司提供DG1060/17.5-II13亚临界锅炉。
为一次中间再热、采用单炉膛、平衡通风、固态排渣、四角切圆燃烧、全钢架、全悬吊结构锅炉。
汽轮机由东方集团东方汽轮机有限公司提供CC300/270-16.67/0.4/538/538一次中间再热、凝汽式汽轮机。
发电机由东方电气集团东方电机有限公司的“水氢氢”冷却方式汽轮发电机组.2.2 工程量2号机组系统中所有执行器几百多台,主要用于远方操作、自动控制系统,它对提高机组的自动化程度和安全可靠运行起着极其重要的作用;其中包括主给水调节阀及前后电动门、减温水调节阀、各风机出入口及风道调节挡板、锅炉、汽机本体疏水等;一些重要控制对象选用进口或进口件国内组装产品。
伯纳德执行器调试说明书

如果 用户 对产品 有疑 问,特 别是 对产品 技术 参数的 疑 问 ,可以通过 我公 司的销 售部 门进行 确认 。确认 时请 提供使 用 产 品的铭牌数据及 出厂序号。
1:Terms concerned with safety
The electric actuators are equipment which is intended for use in heavy current industrial plants. During operation, this equipment has dangerous ,uninsulated live parts and moving or rotating parts. Serious damage to health or property can therefore result from unauthorized removal of the necessary covers, improper use, incorrect operation or inadequate maintenance.
Unquali ed persons are not permitted to work on the machines or in the vicinity of the machines
伯纳德执行器调试说明书
2:运输与存储
使用坚固的包装将电动执行机构运输到安装地点
不允许使用设备的手轮作为吊装位置
电动执行机构应该存储在干燥、通风良好的房间里
电动执行机构在一年中应该至少接通电源一次,以保证电容器冲满电 (防止电解液干枯)
设备要避免放置于潮湿地面,应置于货架托盘Байду номын сангаас上
应当保证电器密封盖密封紧密,即使电缆出口也要严格密闭
Potentiometer 反馈电位器
Cams 凸轮组
Terminal 接线端子排
3 The tension point of two ball-joints is keeping same plane, it is necessary to keep parallel with the plane of two output arms, to avoid the additional torque.
不具 备相 关资质 的 人 员不允 许操 作设备 或接 近设备
注意 设备 可以使 用 范 围的技 术数 据和技 术参 数(安 装、 连接、环 境 及使用 条 件 ),以 上数 据应该 包括 在产品 样本 、订货 合同 、操 作 手 册 中。用 户应 该在产 品文 件中保 留产 品铭牌 的详细内容 。
如果 用户 对产品 有疑 问,特 别是 对产品 技术 参数的 疑 问 ,可以通过 我公 司的销 售部 门进行 确认 。确认 时请 提供使 用 产 品的铭牌数据及 出厂序号。
1:Terms concerned with safety
The electric actuators are equipment which is intended for use in heavy current industrial plants. During operation, this equipment has dangerous ,uninsulated live parts and moving or rotating parts. Serious damage to health or property can therefore result from unauthorized removal of the necessary covers, improper use, incorrect operation or inadequate maintenance.
电动执行器操作手册

CP.RS调试前准备说明书
CN2 输出
CN4 输入
© 2015 Kawasaki Heavy Industries, Ltd. All Rights Reserved
17
通用IO的配线的说明
1. 连接通用IO信号前,要打开控制柜盖板,确认ITW板的型号是 NPN还是PNP,然后根据上面相应的原理图接线。
2
机器人的吊装方法 R系列
© 2015 Kawasaki Heavy Industries, Ltd. All Rights Reserved
3
机器人的吊装方法 CP系列
© 2015 Kawasaki Heavy Industries, Ltd. All Rights Reserved
4
机器人的吊装方法 请严格按照上图方法安装吊具,否则可能会导致机器人倾 倒! 其他未尽事宜请参考随机的‘安装和连接手册’。
22
移动机器人的方法
开机后,将控制柜面板和示教器上的急停按钮释放开,将控制柜面 板上的‚ TEACH/REPEAT‛选择开头置于‚TEACH‛状态,然后将 示教器的示教锁置于‚ON‛。
示教/再现模式选 择开关
示教锁选择开关
© 2015 Kawasaki Heavy Industries, Ltd. All Rights Reserved
© 2015 Kawasaki Heavy Industries, Ltd. All Rights Reserved
13
手臂信号的分配
确认输入无误后,按下回车键,此时通用信号中该部 分信号已经被分配到手臂抓手使用,信号分配完成。
© 2015 Kawasaki Heavy Industries, Ltd. All Rights Reserved
西贝智能执行器调试说明
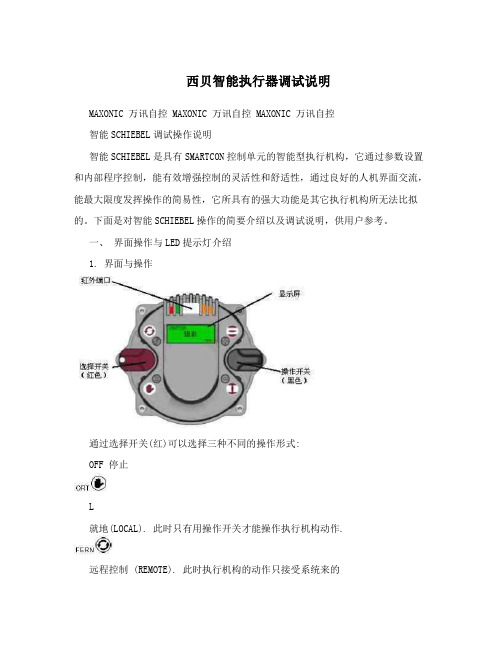
西贝智能执行器调试说明MAXONIC 万讯自控 MAXONIC 万讯自控 MAXONIC 万讯自控智能SCHIEBEL调试操作说明智能SCHIEBEL是具有SMARTCON控制单元的智能型执行机构,它通过参数设置和内部程序控制,能有效增强控制的灵活性和舒适性,通过良好的人机界面交流,能最大限度发挥操作的简易性,它所具有的强大功能是其它执行机构所无法比拟的。
下面是对智能SCHIEBEL操作的简要介绍以及调试说明,供用户参考。
一、界面操作与LED提示灯介绍1. 界面与操作通过选择开关(红)可以选择三种不同的操作形式:OFF 停止L就地(LOCAL). 此时只有用操作开关才能操作执行机构动作.远程控制 (REMOTE). 此时执行机构的动作只接受系统来的信号,不受操作开关的就地控制,但可查阅菜单. 如果须手动操作执行机构,请勿必先将两开关放到中间位置~再压下手柄,转动手轮即可实现手动(手动时禁止将红色选择开关打到状态~执行机构在电动运行状态时禁止压手柄~),如遇手柄压不下去,请先空转手轮再压手柄。
根据选择开关的位置,操作开关就能获得不同的功能:选择开关在“OFF”位置:操作开关被用来上、下翻动菜单,操作开关从中间旋向的方向,可用来观察数据记录状态(S项及H项) ,从中间旋向的方向可以观察参数菜单(P项)与您共享世界新技术成果 We build automation success in ChinaPage 1MAXONIC 万讯自控 MAXONIC 万讯自控 MAXONIC 万讯自控在菜单里,选择开关具有对实际输入的确认和取消的功能,选择开关15度的旋转可用来确认或取消参数项里的各种输入(如果要修改参数请注意将左下角的“edit”变为“save”才能修改,如果要确认参数请注意将“save”变为“edit”).如果在菜单中想快速返主界面,请将操作开关放到中间,选择开关打到L位置后即可。
选择开关在“REMOTE”位置这个状态是远程控制状态,通过操作开关只可观察不同的数据记录,不能进行参数的设定选择开关在“LOCAL”位置操作开关被用来控制执行机构,既可以将开关置于机械保持位置使执行机构做持续运动,也可以通过小幅偏转使执行机构点动,.点动时操作开关都能通过弹簧回到中间位置2. LED指示灯各指示灯不同状态所表示的含义名称颜色亮闪烁不亮L1 红开正在开启没到开位L2 绿关正在关闭没到关位L3 黄转矩正常转矩故障 ---------------L4 黄就绪报警故障二、参数菜单项说明在执行机构菜单中共有P项(组态参数)、S项(数据记录)和H项(历史记录),P 项在后面调试说明和参数设置中将详细讲述。
SB控制系统调试说明书
目 录序----------------------------------------------------------1 一. 电气线路连接及准备工作-----------------------------------2 二. 试上电及联机检查工作--------------------------------------2 三. 三轴读数头的位置调整--------------------------------------4 四. 通用参数设置--------------------------------------------------4 五. 各轴参数设置内容及相关提示信息 ---------------------11 六. 投入运行过程-------------------------------------------------15 七. 三轴 PID 参数优化方法及步骤---------------------------17 八. 手操器的参数设置-------------------------------------------19 九. 测头控制系统的调试----------------------------------------20 十. 更换 C NC0X 时的注意事项--------------------------------20SB控制系统调试说明书序三坐标测量机专用控制系统德国SB公司SB系列——德国先进技术和中国理念的完美结合——性能卓越、超强的抗干扰能力● 德国知名的三坐标测量机专用控制系统。
● 采用国际上先进的上、下位机式的双计算机控制系统。
● 支持多种侧头系统。
● 内置控制技术软件,可实现四轴伺服驱动及运动状态的优化调整。
● 具用伺服参数的调整可进行自动优化配置。
● 内含RENISHAW侧头控制器,可支持RENISHAW全系列侧头系统。
伯纳德调试说明书
BERNARD调试手册(中文)

8.保险丝 ................................................................................................................................. 14
执行器的调试注意事项(精)

电动(diàn dònɡ)执行器调试注意事项1.外观检查,执行器安装(ānzhuāng)固定螺丝螺栓紧固;2.执行器控制回路端子接线松紧检查;(有拆装工作时请特别注意(zhù yì)电源线信号线不要搞混3.执行器输出臂与机务连接部分检查(jiǎnchá),包括铰链、螺丝等紧固,角行程执行器的输出臂与连杆连接角度(jiǎodù)是否合适,避免压力死角(有拆装工作时请特别注意4.检查是否需要进行润滑油脂处理5.调试时先进行全关、全开行程确认并设置,检查开关量行程反馈是否正常;行程到位与否最好与机务检修核对。
对于不同运行场合的设备或有无法同时保证全开全关的情况发生时,要有优先保证全开还是全关的考虑6.机械开关行程设置好后,进行模拟量反馈调整7.如是AO电流控制(伺放板控制的执行器进行4~20mA指令全行程开关调试,一般需调整伺放板上的零位、满度、灵敏度电位器8.就地调试后必须进行DCS联调,AO电流控制的执行器注意定位精度及是否振荡,并进行断信号保护试验9.调试时注意执行器各信道的回路供电方式10.为便于机组(jīzǔ)运行时的隔离操作及故障确认时的操作平稳,就地操作方式请设置为“点动”11.A UMO常见故障:齿轮箱卡死;远方(yuǎnfāng)不能操作(切换按钮坏或逻辑板坏;报故障(力矩动作,停电或反向操作复位;烧电机(原因不明,堵转时热保护不起作用;执行器行程容易调乱(调整不当;只能往一个方向操作(接触器或可控硅坏;过力矩保护误动(短接力矩开关信号(xìnhào)接点12.罗托克电动(diàn dònɡ)执行机构故障:开关异常(主板或电源板故障;反馈波动( 反馈板或比例板故障;无法(wúfǎ)切换(红黑按钮组件老化或其电路板故障;电机转输出臂不转(手自动切换组件更换或其它传动部分故障;过力矩保护异常(主板或力矩检测部分故障;控制电源故障引起的远方无法控制13.瑞基电动执行机构故障:开关异常、晃动、报故障频繁(主板或电源板故障;齿轮箱卡或拉裂2008-7-24气动调节型执行器调试注意事项1.外观检查,执行器安装固定螺丝螺栓紧固;定位器本体及反馈连接、气路设备固定连接是否正常,过滤器、减压阀应无积水,气路无漏点2.过滤器气压调整检查,应高于执行器全开全关所需的薄膜最大压力或活塞气缸压力,并保证能顶开自锁阀3.气动薄膜执行器(一般为直行程的开关是由电/气定位器(I/P直接驱动(qūdònɡ),4~20mA指令在此转变成线性的开关气压作用与薄膜;气动活塞式执行器(一般为角行程的开关力矩较大,不是由电/气定位器(I/P直接驱动,4~20mA指令在电/气定位器先转变成线性的开关气压(一般范围为0~0.1MPa,该控制气压信号(xìnhào)再输入气/气定位器放大后得到活塞的上下缸工作压力(引导阀控制,反馈控制,类似于油动机错油门;4.气动薄膜执行器与机务本体连接时,必须注意确认执行器内弹簧预紧力是否(shì fǒu)调整合适(一般由机务调整,如加入稍大于执行器开始动作的初始气压(qìyā)阀门或挡板还未动作,则还需调整弹簧预紧力(请查阅各品牌阀门的技术数据5.气动(qì dònɡ)薄膜执行器的交点确认(定位器反馈臂与执行器输出轴即阀杆垂直,电位器反馈线性化处理,只要严格按照厂家要求连接执行器行程反馈臂和定位器反馈臂,不作交点调整一般也够用6.气动活塞式执行器全开全关调整注意:,4~20mA指令时电/气定位器(I/P的输出信号气压完全正常,但行程还不够,请调整气/气定位器内气动装置的零位、满度调整装置7.就地调试后必须进行DCS联调,气动调节型执行器一般由4~20mA AO电流控制,请注意定位精度及是否振荡;8.如有三断保护配置,选择一个(yī ɡè)中间开度进行三断(断电、断气、断电流指令信号保护试验9.调试时注意执行器各信道(xìn dào)的回路供电方式,执行器的工作电源(包括电磁阀、电/气转换器、断电流监视器工作(gōngzuò)电源10.存在问题:指令反馈(fǎnkuì)偏差大2008-7-24内容总结(1)电动执行器调试注意事项1.外观检查,执行器安装固定螺丝螺栓紧固(2)气动活塞式执行器(一般为角行程的开关力矩较大,不是由电/气定位器(I/P直接驱动,4~20mA指令在电/气定位器先转变成线性的开关气压(一般范围为0~0.1MPa,该控制气压信号再输入气/气定位器放大后得到活塞的上下缸工作压力(引导阀控制,反馈控制,类似于油动机错油门。
ABB电动执行器使用说明书

ABB电动执行器使用说明书用于过程自动化的智能型电动执行机构仪器仪表—解决方案1 DS_Ontrac_ZH Rev.B 产品简介历史悠久、拥有执行机构行业世界领先地位的Hartmann&Braun 早在40年前,就开始向中国提供高效的电动执行机构产品,并于八十年代向中国的一家企业转让了RHA 、RS 型生产技术。
1999年Hartmann&Braun 随 Elsag Bailey 过程自动化集团正式并入ABB 集团。
ABB 在淘汰了RHA 、RS 型技术后,于2000年推出了Ontrac 智能电动执行机构。
自诞生之日起,Ontrac 就几乎成为先进性和高可靠性的代名词,至今已在世界各地多个工业领域得到广泛的应用。
Ontrac 是实时多任务嵌入式系统与成熟的ABB 变频驱动技术的完美结合体,由于采用了先进的电子技术,Ontrac 的机械部分已经被简化至极致,这无疑是现代机电产品的一个重要的发展方向。
实践证明,Ontrac 产品可以适应各种复杂的甚至十分恶劣的使用环境。
灵活的功能,稳定的性能以及超长的使用寿命都使选用Ontrac产品成为一种很好的投资方案。
功能时间随着数字信息技术的迅猛发展,控制系统对执行机构的功能要求也越来越高,Ontrac 正是顺应这种趋势,做到了既能与当今最先进的控制系统匹配,又能满足所有传统控制系统的要求。
可以说,选用Ontrac 产品,您在技术上也就争得了先机。
主要特性描述:● 采用先进的ABB 变频驱动技术,实现了柔性启动和停机,彻底摆脱"水锤效应"● 速度和力矩双向独立可调,超大的调整范围大幅降低了用户的选型难度和备品成本●灵活的控制方式选择,即能实现总线控制又能满足开关量模拟量控制,并能够适应各种复杂的有特殊要求的改造项目● 电气部分充分的抗干扰和防冲击设计,使产品运行极为稳定,并有效杜绝了"电网污染"问题● 超高的定位精度,即使在全行程(多回转)1圈的情况下,也能够达到1%的定位精度● 广泛的监视与自诊断功能,帮助用户迅速准确地判断执行机构甚至阀门的运行状态● 完善的安全防护功能,可有效杜绝现场误操作或在系统紧急故障时将危害降低至最小● 简洁高效的人机交互界面和非侵入式设计,使现场安装调试变得异常简单● 可靠的电路设计和简单的机械结构造就了超长的使用寿命技术参数供电电源:三相三线制:220/380/460/55V±10%,50/60Hz±5%单相两线制:110/220V±10%,50/60Hz±5%工作模式:1)开关型MOE产品:连续运行,S2-15min2)调节型MME产品:继续运行,S4-25%,接通次数≤1200/小时电机控制:变频控制内部电源:24V.DC,最大40mA,具短路保护功能外部电源:24V.DC(18~33V),最大500mA输入信号:1)模拟量:4~20mA.DC,输入阻抗250Ω,上升特性2)开关量:脉宽≥50ms,数字0为-3~+5V或开路,数字1为+12~+35V3) Pro?bus-DP输出信号:1)模拟量:4~20mA.DC 负载阻抗≤750Ω,温度影响≤0.1%/10K,上升特性(默认)2)开关量:4副基本无源触点,可增选至7或8副(所有输出触点均可组态),触点容量30V.DC,1A或125V.AC,0.5A,4副基本无源触点也可选250V.AC.8A规格3)Pro?bus-DP或MODBUS行程范围:多转式产品最小圈数为1圈,最大圈数不限设定力矩:40%~100%可调,步距5%设定转速:40%~100%可调,步距5%基本误差:1)多转式电动执行机构(行程≥1圈)≤±0.5% 2)角行程电动执行机构3)直行程电动执行机构(行程≥25mm)≤±0.5%控制死区:0.5%(0.5~10%可调)中途限位:1)开限位设置范围为55%~100%2)关限位设置范围为0%~45%防护等级:IP67(IP68可选)防爆等级:ExdⅡBT4可选环境条件:1)环境温度:开关型MOE为-25℃~+70℃调节型MME为-25℃~+60℃分体式传动部分为-40℃~+85℃2)相对湿度:≤95%3)空气介质:周围空气中无强腐蚀性、易燃、易爆气体除湿加热器:产品内部有专门的发热元器件,一般情况下不需要特殊提供CE电气法规:1) EN 61000-6-4: 2007, EN 61000-6-2: 20052) EN 61000-3-2:2006 +A1: 2009+A2: 2009,EN 61000-3-3: 20083) EN 60204-1:2006+A1:2009安装方向:任意方向抗震能力:5~200Hz内0.75g正弦波或5~150Hz内2g正弦波(分体式:加速度3g:X-28.97Hz,Y-96.68Hz,Z-149.6Hz)注:如果您有其他技术要求,请与我们联系,我们将尽力满足您的需求。
S执行器按装、调试和维护手册

3. 操作 3.1操作面板 3.2手自动切换 3.3 手动控制 4、用户设置 4.1 参数说明表 4.2 用户菜单进入 4.3 用户菜单项选择择 4.4 参数修改方法 4.5 退出用户菜单 4.6 整定 4.6.1 整定自动方式 4.6.2 整定手动方式 5、整定失效,处理指导 5.1状态显示处理参考
PS-MA执行机构调试
PS-MA调试
• PS-MA调节模式调试步骤:
• 在标准型号的根底上增加PS伺服放大器,即可实现执行机构的调节动作,执行机构 的调试也就是对PS伺服放大器的调试。在您根据阀门的行程调整好执行器的开关限 位之后,即可通电调试,具体方法如下:〔PS伺服放大器前期型号是PSAP4,后改 进为PSAP5,互相通用〕
M20〕螺母。 ➢ 2、PSL与阀门为柔性连接,如果将连接方法 改为刚性连接那么会引起调试的困难
及 ➢故障的产生,及导致一级减速齿轮或二级减速齿轮的损坏,此情况不在我司保修范
围之列。 ➢ 3、PSL与阀门连接完成后,全关时〔下关上开为例〕铜套外露值d不得超过额定 行程〔PSL201\202\204\208\210为50mm;PSL312/314<PSL214>为65mm; ➢柔性连接盘簧的安装➢〔P至SL关3重20要/3!2〕5为100mm), 见右图。 ➢PSL直行程执行机构与阀杆连接时配有弹性连接器〔即盘簧〕,其作用:①可以阻尼压力峰值及 补偿热膨胀,实现惯性和压力缓冲,保护执行机构和阀门;②初始安装自动校正中心与阀杆同轴; ③可预置关断力,确保由“推力/行程“决定阀位终端的限位关断,防止阀门内漏。
连接关系如图2所示
PS-MA调试
2、用户调试方法
PSAP5出厂时已经进展了默认设置,用户可采用出厂设置,也可自定义, 自定义设置可参考下面步骤进展:
伯纳德调节型电动执行器使用手册解读

电动执行机构使用手册
目录一、简介…………………………………………………………………………… 1二、产品的种类及型式…………………………………………………………… 1三、产品用途……………………………………………………………………… 2四、主要技术性能………………………………………………………………… 2五、结构及特点…………………………………………………………………… 2 1.执行机构…………………………………………………………………… 2 2.位置定位器………………………………………………………………… 4六、电动执行机构工作原理……………………………………………………… 5七、安装调试……………………………………………………………………… 11 1.安装………………………………………………………………………… 11 2.接线………………………………………………………………………… 12 3.整体比例调节型电动执行机构的调试…………………………………… 15 4.远控型电动执行机构的调试……………………………………………… 20 5.两位式电动执行机构的调试……………………………………………… 21 6.调试安装使用注意事项…………………………………………………… 21八、型号规格及外型尺寸图……………………………………………………… 23 1.角行程电动执行机构……………………………………………………… 23 2.直行程电动执行机构……………………………………………………… 31 3.多圈转动式电动执行机构………………………………………………… 33
伯纳德调节型电动执行器操作手册

SR电动执行机构安装调试说明书

A3E型:用于SR20到SR35执行器A3型的延长型
B1型:用于SR10到SR35执行器,有较大的固定轴孔,轴孔和键槽符合ISO标准
B3型:用于SR10到SR35执行器,FREET已加工好轴孔的B4型联轴器
B4型:用于SR10到SR35执行器,驱动轴套为实心,以便于用户加工
SKVAL
SR系列操作手册
智能型阀门电动执行机构
注意:安装使用前,请确保认真完整地阅读和理解了本手册!
SR系列执行器是一种新型的全智能电动阀门执行器,它不仅采用了独特的双密封结构,而且对于所有参数均可利用红外线设定器进行非侵入式设置。独有的多项措施保证了SR执行器的安全性、可靠性和方便性。
本手册将介绍SR执行器的准备、安装、设置(包括对执行器的一级设定和二级设定)和故障诊断功能,目的是帮助用户更好地使用、维护SR执行器。
红旋钮可以选择就地、远程和停止三种控制模式,每种模式都可用一个带6.5mm铁钩的挂锁锁定。
红旋钮图标:
就地操作远程操作停止
就地操作
就地操作的控制信号源包括红外设定器和黑旋钮两种;
黑旋钮图标:
就地开就地关
旋转红旋钮至就地位置。相邻的黑旋钮可分别转至开和关的位置,使执行器执行对应的开关操作。黑旋钮带有自回位功能,黑旋钮回位后开关命令撤销。如果执行器设置为非自维持方式,开关命令撤销后,执行器停止运行。如果执行器设置为自维持方式,即使开关命令撤销后,执行器会持续运行到开关位限。用户可采用反方向控制使执行器中途停止。例如执行器在开过程时,旋转黑色旋钮发出第一次关命令,可使执行器停止(如再次发出关命令将使执行器进行关操作),反之亦然。
初始工作界面
执行器处于初始工作界面时,液晶显示器实时显示当前的力矩和阀位读数值。其中左边为当前力矩百分数值,显示值为当前力矩与执行器额定力矩的百分比。右边为当前阀位的开度值。
ABB工业机器人RS操作手册
操作员手册 RobotStudio
Trace back information: Workspace R15-2 version a5 Checked in 2015-09-24 Skribenta version 4.6.081
操作员手册 RobotStudio
6.02 文档编号: 3HAC032104-010
修订: Q
© 版权所有 2008-2015 ABB。保留所有权利。
本手册中包含的信息如有变更,恕不另行通知,且不应视为 ABB 的承诺。 ABB 对本手 册中可能出现的错误概不负责。 除本手册中有明确陈述之外,本手册中的任何内容不应解释为 ABB 对个人损失、财产 损坏或具体适用性等做出的任何担保或保证。 ABB 对因使用本手册及其中所述产品而引起的意外或间接伤害概不负责。 未经 ABB 的书面许可,不得再生或复制本手册和其中的任何部件。 可从 ABB 处获取此手册的额外复印件。 本出版物的原始语言为英语。所有其他语言版本均翻译自英语版本。
2.4.1 RTT 或 IRBTx003 型导轨运动 ..................................................................... 84 2.4.2 IRBTx004 型导轨运动 ............................................................................... 85 2.5 虚拟控制器 ....................................................................................................... 86 2.5.1 启动VC .................................................................................................. 86 2.5.2 重启VC .................................................................................................. 87 2.6 工作站组件 ....................................................................................................... 88 2.6.1 导入工作站组件 ....................................................................................... 88 2.6.2 转换CAD格式 .......................................................................................... 90 2.6.3 故障排除和优化几何体 .............................................................................. 91 2.7 对象 ................................................................................................................ 93 2.7.1 概述 ...................................................................................................... 93 2.7.2 机械装置 ................................................................................................ 95 2.7.3 工具和工具数据 ....................................................................................... 96
b码对时调试规范 附deq中控代码资料(适用于USB转RS232或者RS485接口)

B码对时调试规范B码对时采用能输出B码的GPS对时装置,经过对时适配器NDS801将GPS输出的5V B码波形转换成24V B码波形,然后接至装置的对时端子给装置校时。
具体接线如下:ACIN(DC- )地GPS直流偏置头B码对时系统接线原理图1、IRIG-B格式时间码(简称B码)为国际通用时间格式码,用于各系统的时间同步。
其对时精度<10us。
B码是每秒一帧的时间串码,每个码元宽度为10ms,一个时帧周期包括100个码元,为脉宽编码。
时帧的参考标志由一个位置识别标志和相邻的参考码元组成,其宽度为8ms,每10个码元有一个位置识别标志。
也就说一个时间格式帧从帧参考标志开始,连续两个8ms宽脉冲表明秒的开始,对时的时序依次为秒-分-时-天。
二进制"1"和"0"的脉宽为5ms和2ms。
2、GPS对时装置采用直流偏置电路设计技术输出B码脉冲,输出电平为5V。
每个GPS直流偏置头485输出可并接4个NDS801。
3、NDS801有两路B码输出接点,即JP2端子的6、7和6、8管脚。
管脚6为24V公用地,7、8管脚分别为两路B码输出的正极端(注:接线时请注意GPS的正负端子不要接反,否则容易烧毁NDS801的B码输出接点的光隔)。
当每个输出接点并接少于4个对时开入回路时处于最佳工作状态,其可并接的最大回路数没有明确的设计数据和试验验证。
目前经工程实际验证过的并接最大对时回路为6个。
4、对于具有MMI插件的装置(如WXH810系列),其对时要求有两路B码输入,分别对CPU插件及MMI插件对时(MMI插件对时端子为4-GPS开入,5-GPS地)。
并且在装置的“系统”菜单内将“GPS对时方式”整定为B,使装置GPS开入设置为B码开入。
5、对于没有MMI插件的装置(如FCK800系列),只要程序支持B码对时即可,无需进行参数设置。
接线时将NDS801的B码输出接点接至装置CPU插件上的GPS开入和24V开入地。
RS的使用 说明 中文

R&S ZVB矢量网络分析仪使用操作说明操作规范:使用者要爱护仪器,确保文明使用。
1、开机前确保稳压电源及仪器地线的正确连接。
2、使用中要求必须佩戴防静电手镯。
3、使用中不得接触仪器接头内芯(含连接电缆)4、使用时不允许工作台有较大振动。
5、使用中不能随意切断电源,造成不正常关机。
不能频繁开关机。
6、使用射频电缆时不要用力大,确保电缆保持较大的弧度。
用毕电缆接头上加接头盖。
7、旋接接头时,要旋接头的螺套,尽量确保内芯不旋转。
8、尽量协调、少用校准件。
校准件用毕必须加盖放回器件盒。
9、转接件用毕应加盖后放回盒中。
10、停用时必须关机,关闭稳压电源。
方可打扫卫生。
11、无源器件调试必须佩戴干净的手套。
概述:1、本说明书主要为无源器件调试而做,涵盖了无源器件调试所需的矢量网络分析仪基本能,关于矢量网络分析仪的其它更进一步的使用,请参照仪器所附的使用说明书。
2、本说明书仅以ZVB4矢量网络分析仪为例,对其它型号矢量网络分析仪,操作步骤基本相同,只是按键和菜单稍有差别。
3、仪器使用的一般要求仪器操作使用规范。
4、带方框的键如MEAS键为仪器面板上的按键,方框内带单引号的键为软菜单(soft menu),即屏幕右侧所示菜单所对应的键,如‘dB Mag’。
5、本仪器几乎所有操作都可以通过鼠标进行。
仪器典型使用流程图如下:开机设定功率设定起始状态(要求见具体器件的工艺文件)设置显示调用已存储状态进行两通道校准存储状态按要求连接器件,测量长时间停用-关机Ⅰ、按左下方的电源键启动矢量网络分析仪,启动后,待仪器完成自检后进入启动界面。
初始状态的默认值如下:起始频率----300KHz终止频率----4GHz端口输出功率----0dBm测量点数----201个轨迹代表的测量值----S21显示格式----dB MAG参考电平----0dB参考线位置----第8格Ⅱ、起始状态设置:1 功率电平设定:㈠按POWER/BW/A VG键,进入功率/测量带宽/平均值设置菜单(菜单如左图所示)。
执行器控制主板调试及使用说明
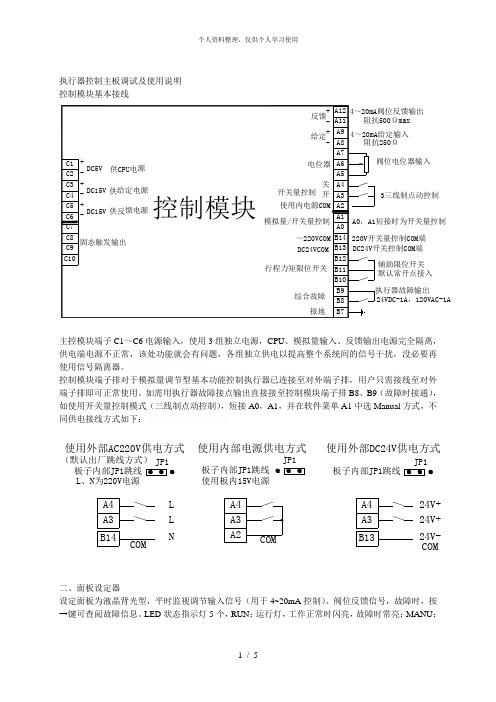
执行器控制主板调试及使用说明控制模块基本接线阀位电位器输入ΩmaxΩ3三线制点动控制辅助限位开关默认常开点接入24VDC-1A,120VAC-1A主控模块端子C1~C6电源输入,使用3组独立电源,CPU、模拟量输入、反馈输出电源完全隔离,供电端电源不正常,该处功能就会有问题,各组独立供电以提高整个系统间的信号干扰,没必要再使用信号隔离器。
控制模块端子排对于模拟量调节型基本功能控制执行器已连接至对外端子排,用户只需接线至对外端子排即可正常使用。
如需用执行器故障接点输出直接接至控制模块端子排B8、B9(故障时接通),如使用开关量控制模式(三线制点动控制),短接A0,A1,并在软件菜单A1中选Manual方式,不同供电接线方式如下:使用内部电源供电方式板子内部JP1跳线使用板内15V电源JP1JP1L、N为220V电源A4A3板子内部JP1跳线使用外部AC220V供电方式B14NLL24V+24V+24V-B13使用外部DC24V供电方式板子内部JP1跳线A3A4JP1COM COM(默认出厂跳线方式)二、面板设定器设定面板为液晶背光型,平时监视调节输入信号(用于4~20mA控制)、阀位反馈信号,故障时,按→键可查阅故障信息。
LED状态指示灯5个,RUN:运行灯,工作正常时闪亮,故障时常亮;MANU:本地手动或远控运行模式指示;AUTO:自动运行灯接受标准信号运行模式;R:正行,电制动瞬间闪亮;F:反行,电制动瞬间闪亮;操作按键5个,SET:设定参数、确认键;M/A:手/自动切换键;→键:移位键;↑键;设定数字增,上翻可选择项,手动开阀;↓键:设定数字减,下翻可选择项,手动关阀。
当按SET键或→键超过3秒则相当于复位键,设置若中途退出可复位。
若选用带红外遥控设定功能的执行器,遥控器操作面板设定方法同液晶屏设定面板,可实现接线后免开盖智能设定及操作维护,设定时请把红外遥控设定器对准玻璃窗口。
三、设定菜单密码:(默认555)按M/A键进入手动状态,按SET键,显示SET A菜单,再次按SET键,显示SET B菜单、SET C 菜单,依次循环;显示菜单项后按M/A键,进入密码显示555,用→键可移位,用↑↓键可修改。