spi实验代码及仿真图
电子万年历报告(SPI总线、含仿真图及程序)

目录目录 0摘要 (1)1课题研究 (2)2 设计要求与方案论证 (2)2.2方案研究 (6)3. 系统硬件电路设计 (7)3.1电路设计 (7)3.2系统硬件概述 (7)3.2.1主控制器AT89C51 (7)3.2.2时钟电路DS1302 (8)3.3主要单元电路设计 (9)3.3.1时钟电路 (9)4 系统的软件设计 (12)4.1程序设计 (12)4.2程序流程图 (12)4.2.1 显示驱动程序流程图 (12)4.2.3 时间控制流程图 (14)5 结束语 ..................................................................................... 错误!未定义书签。
参考文献 ..................................................................................... 错误!未定义书签。
附录一(电路原理图) (15)附录二(程序清单) (15)摘要随着单片机应用技术的发展,单片机的应用模式也在不断变化,一方面,单片机系统的规模越来越大,其外未连接了种,类繁多的外设;一方面,单片机进入了计算机网络系统,工业控制系统多采用多机分布式系统。
同时单片机的嵌入式系统应用模式使其体积越来越小且器件数目越来越少。
近年来,串行接口设备凭借其控制灵活,接口简单、占用资源少等优点在工业控制、仪器仪表等领域被广泛应用。
这些发展趋势更加使得串行通信功能加强了,同时带有串行接口器件也被广泛使用。
本次设计就是对不同总线方式进行研究,并选取带有一种总线接口的器件进行系统设计。
本文以AT89C51单片机作为主控中心,由带有SPI接口的DS1302时钟芯片提供时钟,并用LCD1602液晶显示器进行显示。
AT89C51单品即使有Atmel公司推出的,功耗小,电压可选用4-6V电压供电。
模拟SPI程序【范本模板】
写程序:void SPIx_WriteByte(u8 TxData){u8 j=0;SPI_FLASH_CLK_LOW();//clk=0if(TxData&0x80){SPI_FLASH_DI_HIGH();}//mosi=1else{SPI_FLASH_DI_LOW();} //mosi=0for(j=0;j〈3;j++); //延时SPI_FLASH_CLK_HIGH();//clk=1,一个上升沿写入一位for(j=0;j〈5;j++); //延时SPI_FLASH_CLK_LOW(); //clk=0if(TxData &0x40){SPI_FLASH_DI_HIGH();} //mosi=1else{SPI_FLASH_DI_LOW();}//mosi=0for(j=0;j<3;j++);//延时SPI_FLASH_CLK_HIGH();for(j=0;j<5;j++);SPI_FLASH_CLK_LOW();if(TxData&0x20){SPI_FLASH_DI_HIGH();}//mosi=1else{SPI_FLASH_DI_LOW();} //mosi=0for(j=0;j〈3;j++);//延时SPI_FLASH_CLK_HIGH();for(j=0;j〈5;j++);SPI_FLASH_CLK_LOW();if(TxData&0x10){SPI_FLASH_DI_HIGH();}//mosi=1else{SPI_FLASH_DI_LOW();}//mosi=0for(j=0;j〈3;j++); //延时SPI_FLASH_CLK_HIGH();for(j=0;j〈5;j++);SPI_FLASH_CLK_LOW();if(TxData&0x08){SPI_FLASH_DI_HIGH();} //mosi=1else{SPI_FLASH_DI_LOW();}//mosi=0for(j=0;j〈3;j++);//延时SPI_FLASH_CLK_HIGH();for(j=0;j<5;j++);SPI_FLASH_CLK_LOW();if(TxData&0x04){SPI_FLASH_DI_HIGH();} //mosi=1else{SPI_FLASH_DI_LOW();}//mosi=0for(j=0;j〈3;j++); //延时SPI_FLASH_CLK_HIGH();for(j=0;j〈5;j++);SPI_FLASH_CLK_LOW();if(TxData&0x02){SPI_FLASH_DI_HIGH();}//mosi=1else{SPI_FLASH_DI_LOW();}//mosi=0for(j=0;j〈3;j++); //延时SPI_FLASH_CLK_HIGH();for(j=0;j<5;j++);SPI_FLASH_CLK_LOW(); //clk=0if(TxData&0x01){SPI_FLASH_DI_HIGH();}else{SPI_FLASH_DI_LOW();}for(j=0;j〈3;j++); //延时SPI_FLASH_CLK_HIGH(); //clk=1for(j=0;j<3;j++);//延时SPI_FLASH_CLK_LOW();//clk=0}读程序0x80==0x80u8 SPIx_ReadByte(void){u8 i=0,j=0;for(j=0;j〈3;j++); //延时SPI_FLASH_CLK_HIGH(); //clk=1if(GPIOC-〉IDR&0x80==0x80){i=i+0x80;}for(j=0;j<3;j++); //延时SPI_FLASH_CLK_LOW();//clk=0,下降沿读数for(j=0;j<5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC-〉IDR&0x80==0x80){i=i+0x40;}for(j=0;j<3;j++);//延时SPI_FLASH_CLK_LOW();for(j=0;j<5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC->IDR&0x80==0x80){i=i+0x20;}for(j=0;j〈3;j++);//延时SPI_FLASH_CLK_LOW();for(j=0;j<5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC—>IDR&0x80==0x80){i=i+0x10;}for(j=0;j〈3;j++);//延时SPI_FLASH_CLK_LOW();for(j=0;j〈5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC—>IDR&0x80==0x80){i=i+0x08;}for(j=0;j〈3;j++); //延时SPI_FLASH_CLK_LOW();for(j=0;j〈5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC—>IDR&0x80==0x80){i=i+0x04;}for(j=0;j〈3;j++); //延时SPI_FLASH_CLK_LOW();for(j=0;j<5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC-〉IDR&0x80==0x80){i=i+0x02;}for(j=0;j<3;j++);//延时SPI_FLASH_CLK_LOW();for(j=0;j<5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC->IDR&0x80==0x80){i=i+0x01;}for(j=0;j<3;j++);//延时SPI_FLASH_CLK_LOW();return i;}读程序0x40==0x40u8 SPIx_ReadByte(void){u8 i=0,j=0;for(j=0;j<3;j++); //延时SPI_FLASH_CLK_HIGH(); //clk=1if(GPIOC-〉IDR&0x40==0x40){i=i+0x80;}for(j=0;j〈3;j++); //延时SPI_FLASH_CLK_LOW();//clk=0,下降沿读数for(j=0;j<5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC—〉IDR&0x40==0x40){i=i+0x40;}for(j=0;j<3;j++);//延时SPI_FLASH_CLK_LOW();for(j=0;j<5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC—>IDR&0x40==0x40){i=i+0x20;}for(j=0;j<3;j++); //延时SPI_FLASH_CLK_LOW();for(j=0;j〈5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC—>IDR&0x40==0x40){i=i+0x10;}for(j=0;j〈3;j++); //延时SPI_FLASH_CLK_LOW();for(j=0;j<5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC—>IDR&0x40==0x40){i=i+0x08;}for(j=0;j<3;j++);//延时SPI_FLASH_CLK_LOW();for(j=0;j<5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC-〉IDR&0x40==0x40){i=i+0x04;}for(j=0;j〈3;j++);//延时SPI_FLASH_CLK_LOW();for(j=0;j〈5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC-〉IDR&0x40==0x40){i=i+0x02;}for(j=0;j〈3;j++); //延时SPI_FLASH_CLK_LOW();for(j=0;j<5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC—〉IDR&0x40==0x40){i=i+0x01;}for(j=0;j<3;j++); //延时SPI_FLASH_CLK_LOW();return i;}读程序0x20==0x20u8 SPIx_ReadByte(void){u8 i=0,j=0;for(j=0;j〈3;j++);//延时SPI_FLASH_CLK_HIGH(); //clk=1if(GPIOC—>IDR&0x20==0x20){i=i+0x80;}for(j=0;j<3;j++); //延时SPI_FLASH_CLK_LOW(); //clk=0,下降沿读数for(j=0;j〈5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC->IDR&0x20==0x20){i=i+0x40;}for(j=0;j<3;j++); //延时SPI_FLASH_CLK_LOW();for(j=0;j<5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC—〉IDR&0x20==0x20){i=i+0x20;}for(j=0;j〈3;j++);//延时SPI_FLASH_CLK_LOW();for(j=0;j<5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC-〉IDR&0x20==0x20){i=i+0x10;}for(j=0;j<3;j++);//延时SPI_FLASH_CLK_LOW();for(j=0;j<5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC->IDR&0x20==0x20){i=i+0x08;}for(j=0;j<3;j++);//延时SPI_FLASH_CLK_LOW();for(j=0;j<5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC->IDR&0x20==0x20){i=i+0x04;}for(j=0;j〈3;j++); //延时SPI_FLASH_CLK_LOW();for(j=0;j<5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC->IDR&0x20==0x20){i=i+0x02;}for(j=0;j<3;j++); //延时SPI_FLASH_CLK_LOW();for(j=0;j〈5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC—〉IDR&0x20==0x20){i=i+0x01;}for(j=0;j<3;j++);//延时SPI_FLASH_CLK_LOW();return i;}读程序0x10==0x10读程序0x08==0x08读程序0x04==0x04读程序0x02==0x02u8 SPIx_ReadByte(void){u8 i=0,j=0;for(j=0;j〈3;j++);//延时SPI_FLASH_CLK_HIGH(); //clk=1if(GPIOC->IDR&0x02==0x02){i=i+0x80;}for(j=0;j<3;j++);//延时SPI_FLASH_CLK_LOW();//clk=0,下降沿读数for(j=0;j〈5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC—〉IDR&0x02==0x02){i=i+0x40;}for(j=0;j<3;j++); //延时SPI_FLASH_CLK_LOW();for(j=0;j<5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC—〉IDR&0x02==0x02){i=i+0x20;}for(j=0;j〈3;j++); //延时SPI_FLASH_CLK_LOW();for(j=0;j<5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC-〉IDR&0x02==0x02){i=i+0x10;}for(j=0;j〈3;j++);//延时SPI_FLASH_CLK_LOW();for(j=0;j〈5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC—>IDR&0x02==0x02){i=i+0x08;}for(j=0;j<3;j++); //延时SPI_FLASH_CLK_LOW();for(j=0;j<5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC-〉IDR&0x02==0x02){i=i+0x04;}for(j=0;j<3;j++); //延时SPI_FLASH_CLK_LOW();for(j=0;j〈5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC-〉IDR&0x02==0x02){i=i+0x02;}for(j=0;j<3;j++);//延时SPI_FLASH_CLK_LOW();for(j=0;j<5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC-〉IDR&0x02==0x02){i=i+0x01;}for(j=0;j〈3;j++);//延时SPI_FLASH_CLK_LOW();return i;}读程序0x01==0x01u8 SPIx_ReadByte(void){u8 i=0,j=0;for(j=0;j〈3;j++);//延时SPI_FLASH_CLK_HIGH();//clk=1if(GPIOC-〉IDR&0x01==0x01){i=i+0x80;}for(j=0;j〈3;j++);//延时SPI_FLASH_CLK_LOW();//clk=0,下降沿读数for(j=0;j<5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC—〉IDR&0x01==0x01){i=i+0x40;}for(j=0;j<3;j++); //延时SPI_FLASH_CLK_LOW();for(j=0;j〈5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC->IDR&0x01==0x01){i=i+0x20;}for(j=0;j<3;j++);//延时SPI_FLASH_CLK_LOW();for(j=0;j<5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC—〉IDR&0x01==0x01){i=i+0x10;}for(j=0;j<3;j++); //延时SPI_FLASH_CLK_LOW();for(j=0;j〈5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC—>IDR&0x01==0x01){i=i+0x08;}for(j=0;j〈3;j++); //延时SPI_FLASH_CLK_LOW();for(j=0;j〈5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC—>IDR&0x01==0x01){i=i+0x04;}for(j=0;j<3;j++); //延时SPI_FLASH_CLK_LOW();for(j=0;j<5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC-〉IDR&0x01==0x01){i=i+0x02;}for(j=0;j<3;j++);//延时SPI_FLASH_CLK_LOW();for(j=0;j〈5;j++);SPI_FLASH_CLK_HIGH();if(GPIOC—>IDR&0x01==0x01){i=i+0x01;}for(j=0;j〈3;j++);//延时SPI_FLASH_CLK_LOW();return i;}。
SPI总线信号特性和完整性的测试程序与规定

SPI总线信号特性和完整性的测试程序与规定1. 简介SPI(Serial Peripheral Interface)总线是一种常用于片上系统(SoC)中的串行通信接口。
它允许微控制器与外部设备(如传感器、存储器等)进行高速通信。
为确保SPI总线的稳定性和可靠性,在设计和测试过程中需要考虑信号特性和完整性的问题。
2. 测试程序为了测试SPI总线信号特性和完整性,我们可以采用以下步骤:步骤1:确定测试需求首先,需要明确测试的目标和需求,例如测试SPI总线的最大传输速率、噪声容限等。
步骤2:选择测试设备和工具根据测试需求,选择合适的测试设备和工具。
例如,可以使用示波器、逻辑分析仪等仪器来监测和分析SPI总线的信号。
步骤3:连接测试设备将测试设备正确连接到SPI总线上,确保信号的传输路径正确无误。
步骤4:执行测试程序编写测试程序,通过发送特定的数据和命令,观察和分析SPI总线上的信号特性和完整性。
可以使用合适的软件或硬件工具来实现测试程序。
步骤5:数据分析和结果评估根据测试结果,对SPI总线的信号特性和完整性进行分析和评估。
可以比较测试结果与规定的标准,判断SPI总线是否符合要求。
步骤6:记录和报告将测试过程、结果和评估记录下来,并撰写测试报告。
报告应包括测试目的、测试步骤、测试结果和评估等内容。
3. 规定在测试SPI总线信号特性和完整性时,需要遵守以下规定:- 选择合适的测试设备和工具,确保其性能和准确性。
- 确保测试设备与SPI总线的连接正确可靠。
- 在测试过程中,应注意测试设备的采样率和分辨率,以确保准确捕获和分析信号。
- 根据测试需求,选择合适的测试方法和参数,例如最大传输速率、信号噪声容限等。
- 将测试结果与规定的标准进行比较和评估,判断SPI总线是否符合要求。
- 记录并报告测试过程、结果和评估,以便后续分析和改进。
结论通过合适的测试程序和遵守相关规定,可以有效测试SPI总线的信号特性和完整性。
SPI1SPI2_DMA通信实验(STM32)

SPI1SPI2_DMA通信实验(STM32)STM32学习笔记(⼆)——之SPI_DMA寄存器级操作⼀、实验⽬标学会配置STM32的SPI寄存器和DMA寄存器,实现STM32的SPI1与SPI2通信功能,每次发送⼀字节数据,并可多次发送,如果接收的数据正确,则点亮LED灯。
⼆、实验⽬的加⼊DMA的SPI通信相对于普通SPI通信有什么好处?ST给SPI加了DMA功能出于什么⽬的?我觉得这是很重要的⼀个问题,⼀直边学习边想。
以下是我的看法:减少CPU负荷?我想这应该是DMA最主要的功能,可是对于SPI通信来说,其实⼤部分时候我们需要根据发送的指令->⽬标器件的应答来决定下⼀个指令,所以此时CPU还是需要⼀直等待每次通信的结束。
⽽且像SD卡的操作,是⼀个顺序流的指令操作过程,⽤中断也不容易控制。
那到底加⼊了DMA有什么好处?仔细查看了STM32F10xxx的⽤户⼿册,发现这么⼀⾏字“连续和⾮连续传输:当在主模式下发送数据时,如果软件⾜够快,能够在检测到每次TXE的上升沿(或TXE中断),并⽴即在正在进⾏的传输结束之前写⼊SPI_DR寄存器,则能够实现连续的通信;此时,在每个数据项的传输之间的SPI时钟保持连续,同时BSY位不会被清除。
如果软件不够快,则会导致不连续的通信;这时,在每个数据传输之间会被清除”以及也就是说如果连续传输⽽不使⽤DMA的话,需要CPU不停检测TXE并很快地置⼊SPI->DR的值,对于复杂程序的话这是很难达到的,⽽如果使⽤DMA,就可以轻易实现连续传输,CPU只需等待其完成就好。
我想到的⼀个应⽤就是在写SD卡的时候,每次写⼀个块512字节,就可以⽤到,能提⾼SD卡的写⼊数据速率。
其次还可以降低功耗,记得数字集成电路⽼师说过⼀句话“软件上降低数字电路功耗的⼀个⽅法就是减少电平转换。
”那么连续通信的时候,像SPI的BSY电平转换会⼤⼤减少!最后⼀点,虽然效果不⼤,就是如果不是⽤DMA,那么CPU的⼯作就是搬运⼯,把SPI->DR 的内容搬到内存存储起来,⽽如果使⽤DMA,就省略了这个环节!我想,为什么实现同⼀个功能,有的执⾏起来很流畅,有的却很卡,应该和这些⼩细节的减载有关吧。
FPGA——SPI从机通信实现与仿真
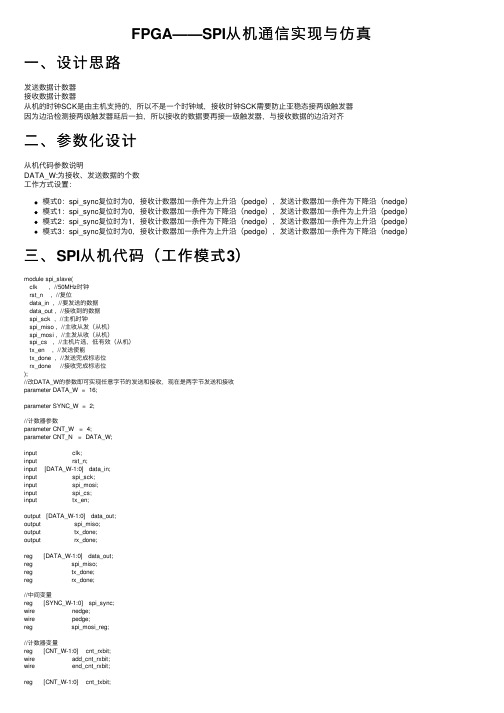
FPGA——SPI从机通信实现与仿真⼀、设计思路发送数据计数器接收数据计数器从机的时钟SCK是由主机⽀持的,所以不是⼀个时钟域,接收时钟SCK需要防⽌亚稳态接两级触发器因为边沿检测接两级触发器延后⼀拍,所以接收的数据要再接⼀级触发器,与接收数据的边沿对齐⼆、参数化设计从机代码参数说明DATA_W:为接收、发送数据的个数⼯作⽅式设置:模式0:spi_sync复位时为0,接收计数器加⼀条件为上升沿(pedge),发送计数器加⼀条件为下降沿(nedge)模式1:spi_sync复位时为0,接收计数器加⼀条件为下降沿(nedge),发送计数器加⼀条件为上升沿(pedge)模式2:spi_sync复位时为1,接收计数器加⼀条件为下降沿(nedge),发送计数器加⼀条件为上升沿(pedge)模式3:spi_sync复位时为0,接收计数器加⼀条件为上升沿(pedge),发送计数器加⼀条件为下降沿(nedge)三、SPI从机代码(⼯作模式3)module spi_slave(clk , //50MHz时钟rst_n , //复位data_in , //要发送的数据data_out , //接收到的数据spi_sck , //主机时钟spi_miso , //主收从发(从机)spi_mosi , //主发从收(从机)spi_cs , //主机⽚选,低有效(从机)tx_en , //发送使能tx_done , //发送完成标志位rx_done //接收完成标志位);//改DATA_W的参数即可实现任意字节的发送和接收,现在是两字节发送和接收parameter DATA_W = 16;parameter SYNC_W = 2;//计数器参数parameter CNT_W = 4;parameter CNT_N = DATA_W;input clk;input rst_n;input [DATA_W-1:0] data_in;input spi_sck;input spi_mosi;input spi_cs;input tx_en;output [DATA_W-1:0] data_out;output spi_miso;output tx_done;output rx_done;reg [DATA_W-1:0] data_out;reg spi_miso;reg tx_done;reg rx_done;//中间变量reg [SYNC_W-1:0] spi_sync;wire nedge;wire pedge;reg spi_mosi_reg;//计数器变量reg [CNT_W-1:0] cnt_rxbit;wire add_cnt_rxbit;wire end_cnt_rxbit;reg [CNT_W-1:0] cnt_txbit;wire add_cnt_txbit;wire end_cnt_txbit;reg tx_flag;//边沿检测always @(posedge clk or negedge rst_n)beginif(!rst_n)//SCK时钟空闲状态位⾼电平,⼯作模式3spi_sync <= 2'b11;elsespi_sync <= {spi_sync[0],spi_sck};endassign nedge = spi_sync[1:0] == 2'b10;assign pedge = spi_sync[1:0] == 2'b01;//上升沿接收,⼯作模式三always @(posedge clk or negedge rst_n)beginif(!rst_n)cnt_rxbit <= 0;else if(add_cnt_rxbit)beginif(end_cnt_rxbit)cnt_rxbit <= 0;elsecnt_rxbit <= cnt_rxbit + 1'b1;endendassign add_cnt_rxbit = pedge;assign end_cnt_rxbit = add_cnt_rxbit && cnt_rxbit == CNT_N - 1; //下降沿发送,⼯作模式三always @(posedge clk or negedge rst_n)beginif(!rst_n)cnt_txbit <= 0;else if(add_cnt_txbit)beginif(end_cnt_txbit)cnt_txbit <= 0;elsecnt_txbit <= cnt_txbit + 1'b1;endendassign add_cnt_txbit = nedge && tx_flag;assign end_cnt_txbit = add_cnt_txbit && cnt_txbit == CNT_N - 1; //因为异步信号同步化的原因,为了与延后的下降沿对齐,多打⼀拍always @(posedge clk or negedge rst_n)beginif(!rst_n)spi_mosi_reg <= 0;elsespi_mosi_reg <= spi_mosi;end//下降沿接收always @(posedge clk or negedge rst_n)beginif(!rst_n)data_out <= 0;else if(!spi_cs)data_out[CNT_N - 1 - cnt_rxbit ] <= spi_mosi_reg;end//上升沿发送数据always @(posedge clk or negedge rst_n)beginif(!rst_n)spi_miso <= 0;else if(!spi_cs && tx_flag)spi_miso <= data_in[CNT_N - 1 - cnt_txbit];elsespi_miso <= 0;endalways @(posedge clk or negedge rst_n)beginif(!rst_n)rx_done <= 0;else if(end_cnt_rxbit)rx_done <= 1;elserx_done <= 0;endalways @(posedge clk or negedge rst_n)beginif(!rst_n)tx_done <= 0;else if(end_cnt_txbit)tx_done <= 1;elsetx_done <= 0;endalways @(posedge clk or negedge rst_n)beginif(!rst_n)tx_flag <= 0;else if(tx_en)tx_flag <= 1;else if(end_cnt_txbit)tx_flag <= 0;endendmodule四、SPI从机 2字节仿真验证代码`timescale 1ns / 1nsmodule spi_slave_tb();parameter DATA_W = 16;parameter CYCLE = 20;parameter CYCLE_SPI = 40;reg clk;reg rst_n;reg [DATA_W-1:0] data_in;reg spi_sck;reg spi_mosi;reg spi_cs;wire [DATA_W-1:0] data_out;wire spi_miso;wire rx_done;wire tx_done;reg [DATA_W-1:0] data;reg tx_en;spi_slave spi_slave(.clk (clk), //50MHz时钟.rst_n (rst_n), //复位.data_in (data_in), //要发送的数据.data_out (data_out), //接收到的数据.spi_sck (spi_sck), //主机时钟.spi_miso (spi_miso), //主收从发(从机).spi_mosi (spi_mosi), //主发从收(从机).spi_cs (1'b0), //主机⽚选,低有效(从机).tx_done (tx_done), //发送完成标志位.tx_en (tx_en),.rx_done (rx_done) //接收完成标志位);reg [3:0]state;initial beginrst_n = 1;#3;rst_n = 0;#(3*CYCLE)rst_n = 1;endinitial clk = 1;always #(CYCLE/2) clk = ~clk;//SCK空闲时为1initial spi_sck = 1;always #(CYCLE_SPI/2) spi_sck = ~spi_sck;initial begindata <= 16'hAAA1;repeat(5)begin@ (posedge rx_done)data <= data + 1'b1;end#1000;$stop;end@ (posedge rst_n)#(10*CYCLE)data_in = 16'hAAA9;tx_en = 1;#(CYCLE)tx_en = 0;end//下降沿发送数据always @(negedge spi_sck,negedge rst_n) beginif(!rst_n)beginspi_mosi <= 0;state <= 4'b0000;endelse begincase(state)4'd0:beginstate <= state + 1;spi_mosi <= data[15];end4'd1:beginstate <= state + 1;spi_mosi <= data[14];end4'd2:beginstate <= state + 1;spi_mosi <= data[13];end4'd3:beginstate <= state + 1;spi_mosi <= data[12];end4'd4:beginstate <= state + 1;spi_mosi <= data[11];end4'd5:beginstate <= state + 1;spi_mosi <= data[10];end4'd6:beginstate <= state + 1;spi_mosi <= data[9];end4'd7:beginstate <= state + 1;spi_mosi <= data[8];end4'd8:beginstate <= state + 1;spi_mosi <= data[7];end4'd9:beginstate <= state + 1;spi_mosi <= data[6];end4'd10:beginstate <= state + 1;spi_mosi <= data[5];end4'd11:beginstate <= state + 1;spi_mosi <= data[4];end4'd12:beginstate <= state + 1;spi_mosi <= data[3];state <= state + 1;spi_mosi <= data[2]; end4'd14:beginstate <= state + 1;spi_mosi <= data[1]; end4'd15:beginstate <= state + 1;spi_mosi <= data[0]; enddefault:state <= 4'b0000; endcaseendendendmodule。
实验十一单片机之间SPI总线通信实验

实现了两台单片机之间的SPI总线通信,成功传输 了数据。 掌握了SPI总线的通信协议和基本原理。
回顾本次实验成果和不足之处
• 熟悉了单片机的编程和调试过程。
回顾本次实验成果和不足之处
不足
在实验过程中,出现了数据传输错误的情况,需要进 一步排查问题。
对SPI总线的通信速率和稳定性还需要进一步优化。
稳定性测试
通过示波器等工具测试硬件平台 的信号稳定性和噪声水平,确保 硬件平台正常工作。
编写并调试软件代码实现通信功能
软件代码编写
根据SPI总线通信协议和单片机编程 语言规范,编写实现SPI通信功能的 软件代码。
代码调试
通过单步调试、断点设置等方法,对 编写的代码进行逐步调试,确保代码 逻辑正确且能够实现预期的通信功能 。
SPI通信协议
SPI通信协议定义了四种通信模式,包括主模式、从模式、 CPOL和CPHA的不同组合,以满足不同器件之间的通信需 求。
SPI接口电路
SPI接口电路包括主控制器、从控制器、时钟信号线、数 据输入线、数据输出线和片选信号线等部分,用于实现主 从器件之间的数据传输。
单片机之间通信需求
01
02
03
数据传输需求
单片机之间需要进行数据 传输,以实现信息共享、 协同工作等功能。
实时性要求
单片机之间的通信需要满 足一定的实时性要求,以 确保数据传输的准确性和 及时性。
可靠性要求
单片机之间的通信需要具 备一定的可靠性,以避免 数据传输错误或丢失等问 题。
实验目标与意义
实验目标
通过搭建单片机之间的SPI总线通信实验平台,实现两个单片机之间的数据传 输,验证SPI总线通信的可行性和稳定性。
SPI总线数据通信实验
1. 内部逻辑结构图
2. 时钟信号的相位和极性
SPI_CR1.LSBFIRST=0 的时序
3. 数据帧格式
根据 SPI_CR1.LSBFIRST 位,输出数据位时可以 MSB 在先也可以 LSB 在先。 根据 SPI_CR1.DFF 位,每个数据帧可以是 8 位或 16 位。所以选择的数据帧格式 对发送或者接受都有效。
Transfer_procedure();
/* Check the corectness of written dada */
TransferStatus = Buffercmp(SPI1_Buffer_Rx, SPI1_Buffer_Tx, BufferSize);
进行读写操作,此时串口会输出读到 FLASH ID 值。 2) 如果读到 ID 值正确,说明 FLASH 在位。FLASH 准备好后,先通过按钮"上"
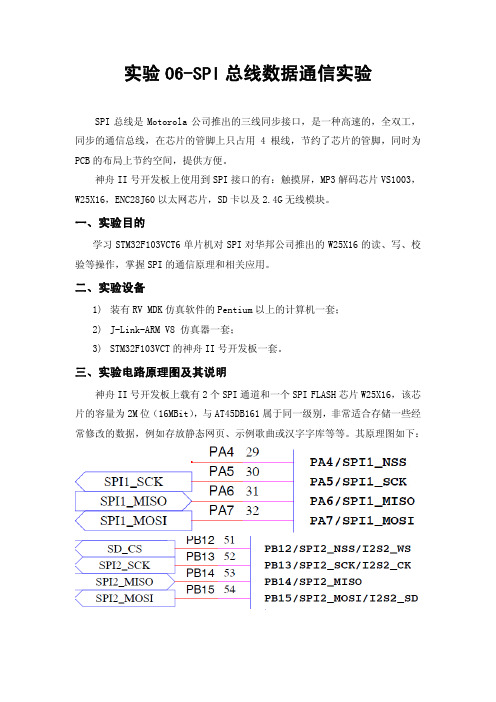
键,将由 SPI2 接口把提前设置好的字符串“const u8 TEXT_Buffer[]={神 舟 II 号 SPI 读写访问程序}”中的数据写到 FALSH W25X16 中;然后,通过 “下”键的检测,将写到 W25X16 的字符串读取出来,并在串口显示出来。 3) 上电后,读取 FLASH 的 ID 号,作为在位判断,如果不在位,则循环打印“当 读到的 ID 为 0xxxx:期望值的 ID 为 0XEF14,请检查硬件连接!”等。否则 准备好,并提示写 FLASH 或是读 FLASH 操作。
7) SPI Tx CRC寄存器(SPI_TXCRCR)
8) SPI_I2S配置寄存器(SPI_I2S_CFGR)
9) SPI_I2S预分频寄存器(SPI_I2SPR)
六、参考程序
SPI总线接口的verilog的实现
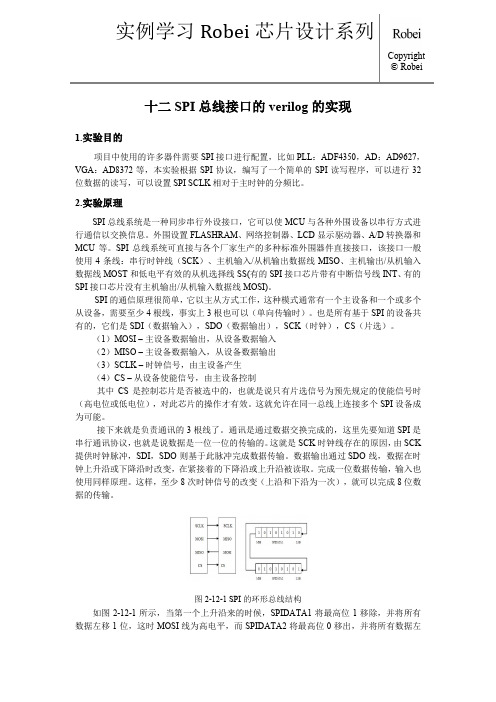
十二SPI总线接口的verilog的实现1.实验目的项目中使用的许多器件需要SPI接口进行配置,比如PLL:ADF4350,AD:AD9627,VGA:AD8372等,本实验根据SPI协议,编写了一个简单的SPI读写程序,可以进行32位数据的读写,可以设置SPI SCLK相对于主时钟的分频比。
2.实验原理SPI总线系统是一种同步串行外设接口,它可以使MCU与各种外围设备以串行方式进行通信以交换信息。
外围设置FLASHRAM、网络控制器、LCD显示驱动器、A/D转换器和MCU等。
SPI总线系统可直接与各个厂家生产的多种标准外围器件直接接口,该接口一般使用4条线:串行时钟线(SCK)、主机输入/从机输出数据线MISO、主机输出/从机输入数据线MOST和低电平有效的从机选择线SS(有的SPI接口芯片带有中断信号线INT、有的SPI接口芯片没有主机输出/从机输入数据线MOSI)。
SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要至少4根线,事实上3根也可以(单向传输时)。
也是所有基于SPI的设备共有的,它们是SDI(数据输入),SDO(数据输出),SCK(时钟),CS(片选)。
(1)MOSI –主设备数据输出,从设备数据输入(2)MISO –主设备数据输入,从设备数据输出(3)SCLK –时钟信号,由主设备产生(4)CS –从设备使能信号,由主设备控制其中CS是控制芯片是否被选中的,也就是说只有片选信号为预先规定的使能信号时(高电位或低电位),对此芯片的操作才有效。
这就允许在同一总线上连接多个SPI设备成为可能。
接下来就是负责通讯的3根线了。
通讯是通过数据交换完成的,这里先要知道SPI是串行通讯协议,也就是说数据是一位一位的传输的。
这就是SCK时钟线存在的原因,由SCK 提供时钟脉冲,SDI,SDO则基于此脉冲完成数据传输。
数据输出通过 SDO线,数据在时钟上升沿或下降沿时改变,在紧接着的下降沿或上升沿被读取。
STM32之IO口模拟SPI
STM32之IO⼝模拟SPI本⽂介绍如何使⽤STM32标准外设库的GPIO端⼝模拟SPI,本例程使⽤PA5、PA6和PA7模拟⼀路SPI。
SPI有4种⼯作模式,模拟SPI使⽤模式0,即空闲时SCK为低电平,在奇数边沿采样。
本⽂适合对单⽚机及C语⾔有⼀定基础的开发⼈员阅读,MCU使⽤STM32F103VE系列。
1. 简介SPI 协议是由摩托罗拉公司提出的通讯协议(Serial Peripheral Interface),即串⾏外围设备接⼝,是⼀种⾼速全双⼯的通信总线。
它被⼴泛地使⽤在要求通讯速率较⾼的场合。
SPI⽤于多设备之间通讯,分为主机Master和从机Slave,主机只有⼀个,从机可以有多个,通过⽚选信号对从机进⾏选择,⼀次只能选择⼀个从机。
通讯只能由主机发起,⽀持的操作分为读取和写⼊,即主机读取从机的数据,以及向从机写⼊数据。
SPI⼀般有4根线,分别是⽚选线SS、时钟线SCK、主设备输出\从设备输⼊MOSI、主设备输⼊\从设备输出MISO,其中除MISO对于主机为输⼊引脚外,其他引脚对于主机均为输出引脚。
因为有独⽴的输⼊和输出引脚,因此SPI⽀持全双⼯⼯作模式,即可以同时接收和发送。
2. 总线传输信号空闲状态:⽚选信号SS低电平有效,那么空闲状态⽚选信号SS为⾼。
开始信号及结束信号:开始信号需要将⽚选信号SS拉低,结束信号需要将⽚选信号SS拉⾼。
通讯模式:SPI有4种通讯模式,分别为0、1、2、3,根据时钟极性和时钟相位确定,时钟极性分别为空闲低电平和空闲⾼电平,时钟相位分别为SCK奇数边沿采样和偶数边沿采样。
常⽤的模式为模式0和模式3。
SPI模式时钟极性(空闲时SCK时钟)时钟相位(采样时刻)0低电平奇数边沿1低电平偶数边沿2⾼电平奇数边沿3⾼电平偶数边沿3. 时序说明以模式0举例说明:空闲状态:⽚选信号SS为⾼,SCK输出低电平。
开始信号:⽚选信号SS变低,SCK输出低电平。
结束信号:⽚选信号SS变⾼,SCK输出低电平。
模拟SPI通信ad7705单片机源代码

MSP430_WriteSPI0(0x10); // 写0x11通信寄存器,测温channel 01 ,下一个写时钟寄存器
MSP430_WriteSPI0(0x40); // 写0x46设置寄存器,设置成单极性、无缓冲、增益为1、滤波器工作、自校准
ADC_tem=0;
for(pit=4;pit<n;pit++)
{
ADC_tem+=ADC_temp[pit]; //求和
}
max=ADC_temp[4];
min=ADC_temp[4];
for(i=4;i<n;i++)
{
if(ADC_temp[i]>max)
TempData = (TempData << 1) | TempBit;
}
spiDIR_OUT;
SpiDi_1;
return TempData;
}
int get_ad7705(char channel) //读温度channel=0x01或差压数据 channel=0x00
else
{
SpiDo_0;
}
SpiCL_1;
temp = temp>>1;
}
d)
{
unsigned char i;
unsigned char TempBit = 0;
int TempData = 0;
}
while (DRDY==1);//DRDY为高不能进行读操作
kb[30] = Read7705();//RXBUF0
SPI接口时序仿真

SPI接口数据交互 讲授人:尤恺元
SPI接口
• SPI接口应用: • 串行flash 的读写擦除命令通过SPI接口进 行通信。 • CPU芯片与FPGA通过SPI接口进行通信。 • 其他功能集成电路芯片参数寄存器配置。
某DAC芯片的SPI配置时序
• SPI(Serial Peripheral Interface)
dac_ini_ctrl.v代码
always @(posedge sclk) if(shift_end) shift_cnt<='d0; else if(state==WRITE && pose_flag == 1'b1) shift_cnt<=shift_cnt+'d1; //latch data always @(posedge sclk) if(state==READ_MEM) shift_data<=dout; else if(state==WRITE && pose_flag == 1'b1) shift_data<={shift_data[14:0],1'b0}; //spi clk always @(posedge sclk) if(div_cnt==DIV_NUM) clk_p=~clk_p; assign clk_n=~clk_p;
仿真脚本run.do
#虚拟信号结构 virtual type { {1 IDLE} {2 WAIT} {4 READ_MEM} {8tate;
add wave -noupdate -divider {top module dac_ini_ctrl} add wave -radix hexadecimal tb_dac_ini_ctrl/dac_ini_ctrl/* add wave -noupdate -divider {state} virtual function {(dac_ctrl_state)/tb_dac_ini_ctrl/dac_ini_ctrl/state} new_state_signal add wave -radix hexadecimal -color yellow /tb_dac_ini_ctrl/dac_ini_ctrl/new_state_signal run 1ms
TMS320x2802x_SPI(完全版)
TMS320x2802x, 2803x Piccolo SerialPeripheral Interface (SPI)翻译杨建旭单位曲阜师范大学新能源研究所1 增强的SPI模块概览 (2)1.1SPI块框图 (3)1.2 SPI模块信号概要 (4)1.3 SPI模块寄存器概要 (4)1.4 SPI操作 (5)1.4.1 操作引言 (5)1.4.2 SPI模块从模式和主模式操作 (6)1.4.2.1主模式 (6)1.4.2.2 从模式 (7)1.5 SPI中断 (7)1.5.1 SPI中断控制位 (7)1.5.1.1 SPI INT ENA 位(SPICTL.0) (7)1.5.1.2 SPI INT FALG位(SPISTS.6) (8)1.5.1.3 OVERRUN INT ENA位(SPICTL.4) (8)1.5.1.4 RECEIVER OVERRUN FLAG 位(SPISTS.7) (8)1.5.2 数据格式 (8)1.5.3 波特率和时钟策略 (9)1.5.3.1 SPI时钟策略 (9)1.5.4 复位初始化 (10)1.5.5 数据发送例程 (11)1.6 SPI FIFO描述 (12)1.7 SPI 3线模式描述 (14)1.8 数字音频传输中SPI STEINV位 (16)串行外设接口(SPI)串行外设接口(SPI)是高速同步串行输入/输出口,该口允许可编程长度的串行比特以可片成的位移速率流移进和移出设备。
SPI通常用作DSP控制器和外部设备或者其他控制器之间的通信。
典型的应用包括I/O或者诸如移位寄存器,显示驱动和模拟数字转换器等的外部扩充设备。
多设备的通信由SPI的主/从模式来完成。
在C28x系列上,SPI口支持4级深度,接受和发送FIFO,该技术减少了CPU占用率。
注意:28x相对240xA的SPI增强了几个方面的特性。
查看1.5获得更多的细节。
1 增强的SPI模块概览图1显示了SPI与CPU的接口。
STM32 SPI通信原理及编程步骤

一、简介
SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线。 SPI 接口一般使用 4 条线通信:
MISO 主设备数据输入,从设备数据输出。 MOSI 主设备数据输出,从设备数据输入。 SCLK 时钟信号,由主设备产生。 CS 从设备片选信号,由主设备控制。
从图中可以看出, 主机和从机都有一个串行移位寄存器,主机通过向它的 SPI 串行寄存器写入一个字节来发起一次传输。寄存器通过 MOSI 信 号线将字节传送给从机,从机也将自己的移位寄存器中的内容通过 MISO 信号线返回给主机。这样,两个移位寄存器中的内容就被交换。外设的写 操作和读操作是同步完成的。如果只进行写操作,主机只需忽略接收到的字节;反之,若主机要读取从机的一个字节,就必须发送一个空字节来引 发从机的传输。
uint16_t SPI_Direction; uint16_t SPI_Mode; uint16_t SPI_DataSize; uint16_t SPI_CPOL; uint16_t SPI_CPHA; uint16_t SPI_NSS; uint16_t SPI_BaudRatePrescaler; uint16_t SPI_FirstBit; uint16_t SPI_CRCPolynomial; }SPI_InitTypeDef;
1) 配置相关引脚的复用功能,使能 SPI2 时钟 我们要用 SPI2,第一步就要使能 SPI2 的时钟。其次要设置 SPI2 的相关引脚为复用输出,这样才会连接到 SPI2 上否则这些 IO 口还是默认的状 态,也就是标准输入输出口。这里我们使用的是 PB13、 14、 15 这 3 个( SCK.、 MISO、 MOSI, CS 使用软件管理方式),所以设置这三个为 复用 IO。 GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE );//PORTB 时钟使能 RCC_APB1PeriphClockCmd(RCC_APB1Periph_SPI2, ENABLE );//SPI2 时钟使能 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //PB13/14/15 复用推挽输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化 GPIOB 2) 初始化 SPI2,设置 SPI2 工作模式 接下来我们要初始化 SPI2,设置 SPI2 为主机模式,设置数据格式为 8 位,然设置 SCK 时钟极性及采样方式。并设置 SPI2 的时钟频率(最大 18Mhz),以及数据的格式( MSB 在前还是LSB 在前)。 这在库函数中是通过 SPI_Init 函数来实现的。void SPI_Init(SPI_TypeDef* SPIx, SPI_InitTypeDef* SPI_InitStruct);跟其他外设初始化一样,第一个参数是 SPI 标号,这里我们是使用的 SPI2。 下面我们来看看第二个参数结构 体类型 SPI_InitTypeDef 的定义: typedef struct {
电子线路与仿真技术课程设计spi接口控制开关及模拟量输出

电子线路与仿真技术课程设计说明书题目:SPI接口控制开关及模拟量输出系部:信息与控制工程学院专业:电子信息工程班级:2013级2班学生姓名: AA 学号:指导教师:2015年5月24日目录1 设计背景 (1)1.1 SPI的简介 (1)1.2 SPI的应用与特点 (1)1.3 接口信号 (1)1.4 数据传输 (2)1.5 时钟极性和时钟相位 (3)2 设计任务与要求 (4)2.1 设计任务 (4)2.2 设计要求 (4)3 设计方案 (4)4 SPI主机接口设计 (5)4.1 SPI总线标准 (5)4.2 SPI主机功能描述 (7)4.3 单片机扩展SPI总线的系统框图 (7)4.4 单片机SPI总线的时序模拟 (9)5 从机的接口设计 (9)5.1 从机设计原理 (9)5.2 74HC595资料 (10)5.3 74HC595的连接原理图 (13)5.4 16路开关量输出电路 (14)5.5 模拟量输出电路 (15)5.6 整体程序框图 (15)6 实验仿真图 (16)7 实验结果分析 (16)7.1 16路开关量输出电路分析 (16)7.2 模拟量输出电路 (17)8 结论与体会 (17)参考文献 (19)1设计背景1.1SPI的简介SPI(Serial Peripheral Interface--串行外设接口)总线系统是一种同步串行外设接口,它可以使MCU与各种外围设备以串行方式进行通信以交换信息。
SPI有三个寄存器分别为:控制寄存器SPCR,状态寄存器SPSR,数据寄存器SPDR。
外围设备包括FLASHRAM、网络控制器、LCD显示驱动器、A/D转换器和MCU等。
SPI总线系统可直接与各个厂家生产的多种标准外围器件直接接口,该接口一般使用4条线:串行时钟线(SCLK)、主机输入/从机输出数据线MISO、主机输出/从机输入数据线MOSI和低电平有效的从机选择线NSS(有的SPI接口芯片带有中断信号线INT、有的SPI接口芯片没有主机输出/从机输入数据线MOSI)。
spi模拟——精选推荐

spi模拟#include#include#define MODE 0 //MODE=1时为发送代码 MODE=0时为接收代码typedef unsigned char uchar;//****************************************IO端⼝定义***************************************sbit MISO =P1^2;sbit MOSI =P1^3;sbit SCK =P1^1;sbit CE =P1^0;sbit CSN =P3^2;sbit IRQ =P3^3;//******************************************************************************************uchar bdata sta; //状态标志sbit RX_DR =sta^6;sbit TX_DS =sta^5;sbit MAX_RT =sta^4;//*********************************************NRF24L01*************************************#define TX_ADR_WIDTH 5 // 5 uints TX address width#define RX_ADR_WIDTH 5 // 5 uints RX address width#define TX_PLOAD_WIDTH 32 // 32 uints TX payload#define RX_PLOAD_WIDTH 32 // 32 uints TX payloaduchar const TX_ADDRESS[TX_ADR_WIDTH]= {0x34,0x43,0x10,0x10,0x01}; //本地地址uchar const RX_ADDRESS[RX_ADR_WIDTH]= {0x34,0x43,0x10,0x10,0x01}; //接收地址uchar code Tx_Buf[TX_PLOAD_WIDTH]={0xff,0xee,0x11,0x22,0x33,0xaa,0xbb,0x11,0x22,0x33,0xaa,0xbb,0x11,0x22, 0x33,0xaa,0xbb,0x11,0x22,0x33,0xaa,0xbb,0x11,0x22,0x33,0xaa,0xbb,0x11,0x22,0x33,0xee,0xff};//发送数据uchar Rx_Buf[RX_PLOAD_WIDTH];//接收数据//***************************************NRF24L01寄存器指令*******************************************************#define READ_REG 0x00 // 读寄存器指令#define WRITE_REG 0x20 // 写寄存器指令#define RD_RX_PLOAD 0x61 // 读取接收数据指令#define WR_TX_PLOAD 0xA0 // 写待发数据指令#define FLUSH_TX 0xE1 // 冲洗发送 FIFO指令#define FLUSH_RX 0xE2 // 冲洗接收 FIFO指令#define REUSE_TX_PL 0xE3 // 定义重复装载数据指令#define NOP 0xFF // 保留//*************************************SPI(nRF24L01)寄存器地址****************************************************#define CONFIG 0x00 // 配置收发状态,CRC校验模式以及收发状态响应⽅式#define EN_AA 0x01 // ⾃动应答功能设置#define EN_RXADDR 0x02 // 可⽤信道设置#define SETUP_AW 0x03 // 收发地址宽度设置#define SETUP_RETR 0x04 // ⾃动重发功能设置#define RF_CH 0x05 // ⼯作频率设置#define RF_SETUP 0x06 // 发射速率、功耗功能设置#define STATUS 0x07 // 状态寄存器#define OBSERVE_TX 0x08 // 发送监测功能#define CD 0x09 // 地址检测#define RX_ADDR_P0 0x0A // 频道0接收数据地址#define RX_ADDR_P1 0x0B // 频道1接收数据地址#define RX_ADDR_P2 0x0C // 频道2接收数据地址#define RX_ADDR_P3 0x0D // 频道3接收数据地址#define RX_ADDR_P4 0x0E // 频道4接收数据地址#define RX_ADDR_P5 0x0F // 频道5接收数据地址#define TX_ADDR 0x10 // 发送地址寄存器#define RX_PW_P0 0x11 // 接收频道0接收数据长度(1到32字节)#define RX_PW_P1 0x12 // 接收频道1接收数据长度#define RX_PW_P2 0x13 // 接收频道2接收数据长度#define RX_PW_P3 0x14 // 接收频道3接收数据长度#define RX_PW_P4 0x15 // 接收频道4接收数据长度#define RX_PW_P5 0x16 // 接收频道5接收数据长度#define FIFO_STATUS 0x17 // FIFO栈⼊栈出状态寄存器设置/******************************************延时函数********************************************************/ //长延时void Delay(unsigned int s){unsigned int i,j;for(i=0;i<1000;i++)for(j=0;j}//短延时void delay_ms(unsigned int x){unsigned int i,j;i=0;for(i=0;i{j=108;;while(j--);}}/************************************IO ⼝模拟SPI总线代码************************************************/ uchar SPI_RW(uchar byte){uchar bit_ctr;for(bit_ctr=0;bit_ctr<8;bit_ctr++){MOSI=(byte&0x80);byte=(byte<<1);SCK=1;byte|=MISO;//led=MISO;Delay(150);SCK=0;}return(byte);}uchar SPI_RW_Reg (uchar reg,uchar value) // 向寄存器REG写⼀个字节,同时返回状态字节{uchar status;CSN=0;status=SPI_RW(reg);SPI_RW(value);CSN=1;return(status);}uchar SPI_Read (uchar reg ){uchar reg_val;CSN=0;SPI_RW(reg);reg_val=SPI_RW(0);CSN=1;return(reg_val);}uchar SPI_Write_Buf(uchar reg, uchar *pBuf, uchar bytes){uchar status,byte_ctr;CSN = 0; // Set CSN low, init SPI tranactionstatus = SPI_RW(reg); // Select register to write to and read status bytefor(byte_ctr=0; byte_ctrSPI_RW(*pBuf++);CSN = 1; // Set CSN high againreturn(status); // return nRF24L01 status byte}/*******************************发*****送*****模*****式*****代*****码*************************************/void TX_Mode(void){CE=0;SPI_RW_Reg(FLUSH_TX,0x00);SPI_Write_Buf(WRITE_REG + TX_ADDR, TX_ADDRESS, TX_ADR_WIDTH); // Writes TX_Address to nRF24L01SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // RX_Addr0 same as TX_Adr for Auto.AckSPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // Enable Auto.Ack:Pipe0SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); // Enable Pipe0SPI_RW_Reg(WRITE_REG + SETUP_RETR, 0x1a); // 500us + 86us, 10 retrans...1aSPI_RW_Reg(WRITE_REG + RF_CH, 40); // Select RF channel 40SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); // TX_PWR:0dBm, Datarate:1Mbps, LNA:HCURRSPI_RW_Reg(WRITE_REG + RX_PW_P0, RX_PLOAD_WIDTH); //设置接收数据长度,本次设置为2字节SPI_RW_Reg(WRITE_REG + CONFIG, 0x0e);CE=1;delay_ms(100);}void Transmit(unsigned char * tx_buf){CE=0;//StandBy I模式SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // 装载接收端地址SPI_RW_Reg(FLUSH_TX,0x00);SPI_Write_Buf(WR_TX_PLOAD, tx_buf, TX_PLOAD_WIDTH); // 装载数据SPI_RW_Reg(WRITE_REG + CONFIG, 0x0e); // IRQ收发完成中断响应,16位CRC,主发送CE=1; //置⾼CE,激发数据发送delay_ms(150);}#else/*******************************接*****收*****模*****式*****代*****码*************************************/uchar SPI_Read_Buf(uchar reg, uchar *pBuf, uchar uchars){uchar status,uchar_ctr;CSN = 0; // Set CSN low, init SPI tranactionstatus = SPI_RW(reg); // Select register to write to and read status ucharfor(uchar_ctr=0;uchar_ctrpBuf[uchar_ctr] = SPI_RW(0); //CSN = 1;return(status); // return nRF24L01 status uchar}/******************************************************************************************************//*函数:unsigned char nRF24L01_RxPacket(unsigned char* rx_buf)/*功能:数据读取后放如rx_buf接收缓冲区中/******************************************************************************************************/unsigned char nRF24L01_RxPacket(unsigned char* rx_buf){unsigned char revale=0;sta=SPI_Read(STATUS); // 读取状态寄存其来判断数据接收状况if(RX_DR) // 判断是否接收到数据{//CE = 0; //SPI使能SPI_Read_Buf(RD_RX_PLOAD,rx_buf,RX_PLOAD_WIDTH);// read receive payload from RX_FIFO bufferrevale =1; //读取数据完成标志//Delay(100);}SPI_RW_Reg(WRITE_REG+STATUS,sta); //接收到数据后RX_DR,TX_DS,MAX_PT都置⾼为1,通过写1来清楚中断标志}/****************************************************************************************************//*函数:void RX_Mode(void)/*功能:数据接收配置/****************************************************************************************************/void RX_Mode(void){CE=0;SPI_RW_Reg(FLUSH_RX,0x00);//SPI_Write_Buf(WRITE_REG + TX_ADDR, TX_ADDRESS, TX_ADR_WIDTH); // Writes TX_Address to nRF24L01 SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // RX_Addr0 same as TX_Adr for Auto.AckSPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // Enable Auto.Ack:Pipe0SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); // Enable Pipe0//SPI_RW_Reg(WRITE_REG + SETUP_RETR, 0x1a); // 500us + 86us, 10 retrans...1aSPI_RW_Reg(WRITE_REG + RF_CH, 40); // Select RF channel 40SPI_RW_Reg(WRITE_REG + RX_PW_P0, RX_PLOAD_WIDTH); //设置接收数据长度,本次设置为2字节SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); // TX_PWR:0dBm, Datarate:1Mbps, LNA:HCURRSPI_RW_Reg(WRITE_REG + CONFIG, 0x0F);CE=1;delay_ms(130);}//************************************串⼝初始化*********************************************************void StartUART( void ){ //波特率9600SCON = 0x50;TMOD = 0x20;TH1 = 0xFD;TL1 = 0xFD;PCON = 0x00;TR1 = 1;}//************************************通过串⼝将接收到数据发送给PC端**************************************void R_S_Byte(uchar R_Byte){SBUF = R_Byte;while( TI == 0 ); //查询法TI = 0;}#endif//************************************主函数************************************************************void main(){int i=0;CE=0;SCK=0;CSN=1;P1=0x00;#if MODE //发送模式代码TX_Mode();//SPI_RW_Reg(FLUSH_RX,0x00);while(1){Transmit(Tx_Buf);Delay(10);sta=SPI_Read(READ_REG + STATUS);if(TX_DS){P1=sta; //8位LED显⽰当前STATUS状态发送中断应使bit5 = 1 灯灭Delay(100);SPI_RW_Reg(WRITE_REG + STATUS,sta);}if(MAX_RT) //如果是发送超时{P1=0x0f; //发送超时时 8位LED灯 bit4 = 1 灯灭Delay(150);SPI_RW_Reg(WRITE_REG + STATUS,sta);}}#else //接收模式代码StartUART();RX_Mode();Delay(0);//防⽌编译警告while(1){if(nRF24L01_RxPacket(Rx_Buf)){for(i=0;iR_S_Byte(Rx_Buf[i]);}}#endif}。
本科毕业设计--spi接口的仿真及验证
毕业设计(论文)
题目:SPI接口的仿真及验证
物联网工程学院电子信息工程专业
学号0703090121
学生姓名胥翔
指导教师虞致国 副教授
二〇一三年六月
摘要
在专用集成电路(ASIC)设计技术以及超大规模集成电路(VLSI)工艺技术的飞速发展的今天,FPGA编程的硬件电路被越来越多的应用于实现诸如SPI接口等方面。相对于软件实现,硬件具有更多的优点。SPI接口技术是一种高速高效率的串行接口技术,主要用于扩展外设及其数据交换,已经作为一种配置标准。作为一个标准的接口,SPI具有简单方便和节省系统资源的优点,使得大多数芯片都支持该接口。SPI接口主要应用在EEPROM、FLASH、实时时钟、AD转换器,还有数字信号处理器和数字信号解码器之间。
In application-specific integrated circuit (ASIC) design technology and very large scale integrated circuit (VLSI) technology rapid development today, the FPGA programming of the hardware circuit is more and more used in implementation such as SPI interface. Relative to the software, hardware has more advantages.As a standard interface, SPI has advantages of simple and convenient and saving system resources, makes the most of the chip is supported by the interface.SPI interface block is mainly used in EEPROM, FLASH, real-time clock, AD converter, and between the digital signal processor and digital signal decoder.
SPI主机实验---7段数码管显示

班级07电本(2)学号50 姓名邹雪卫同组人实验日期2010-4-13 室温大气压成绩
主机操作
下面的步骤描述了SPI设置为主机是如何处理数据传输。
该处理假设已经设定引脚连接SPI,并且如何之前的数据传输已经结束。
(1)设置SPCCR,得到需要的SPI时钟。
(2)设置SPCR,控制SPI为主机模式,配置SPI时钟极性等。
(3)选择从机,将要发送的数据写入SPI数据寄存器。
此写操作启动SPI数据传输。
(4)等待SPI状态寄存器中SPIF位置。
SPIF位将在SPI数据传输的最后一个周期之后置位。
(5)读取SPI状态寄存器。
(6)从SPI数据寄存器之中读出接收到的数据。
(7)如果有更多数据需要发送,则跳到第(3)步。
SPI主机实验---7段数码管显示
该实验演示在7段数码管上显示一些字符,字符的字模表存于一数组中
补充说明:7段数码管(有小数点的是8段数码管)真值表的有来。
EasyARM2131开发板上使用的数码管是8段共阳数码管,低电平点亮其示意原理图和段的定义如下图所示:。
实验报告温度计(SPI通信及单总线通信)
{
dat_w12864(0x00);//写点内容,列地址自动加1
}
}
}
/***初始化****/
void init12864(void)
{
chekbusy12864();
cmd_w12864(0xc0);
cmd_w12864(0x3f);
}
/**8X16字符的显示**/
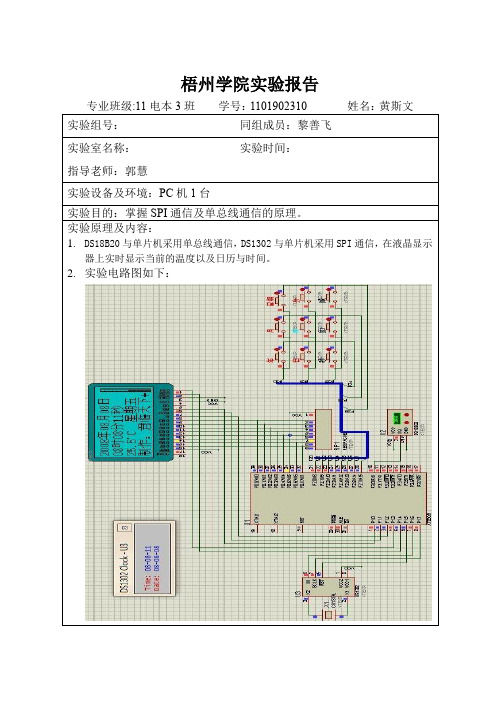
实验原理及内容:
1.DS18B20与单片机采用单总线通信,DS1302与单片机采用SPI通信,在液晶显示器上实时显示当前的温度以及日历与时间。
2.实验电路图如下:
实验步骤及数据记录:
3.实验程序如下:
main程序如下:
#include "ds18b20.h"
#include "12864.h"
#include "1302.h"
vertical(3,63,63);
vertical(3,63,62);
vertical(3,63,58);
vertical(3,63,57);
for(i=0;i<7;i++)
{
dot(57+i,3);
dot(57+i,63);
}
for(i=0;i<12;i++)
{
dot(59,8+5*i);
}
for(i=0;i<7;i++)
cmd_w12864(page+0xb9);
for(i=16;i<32;i++)
{