基于SMS的GPS差分定位系统设计
GPS差分测量的原理与实施步骤

GPS差分测量的原理与实施步骤GPS(全球定位系统)是一项引领现代定位技术的重要发明,它在我们的日常生活中扮演着重要角色。
GPS的准确度受到多种因素的影响,如天气、建筑物的阻挡等。
为了提高GPS定位的准确度和精度,人们开始使用GPS差分测量技术。
差分测量是通过使用两个或多个接收器来测量GPS信号的时间差,从而确定接收器的位置。
这种技术利用了GPS信号在传播过程中的误差,通过对比接收器之间的差异来消除这些误差,并提高定位的准确度。
GPS差分测量的原理和实施步骤如下所述。
首先,GPS差分测量的原理是基于多个接收器之间的时间差。
每个GPS接收器都能接收来自卫星的信号,并记录下信号到达的时间。
接收器之间的时间差取决于它们之间的距离差异。
差分测量利用了这种时间差,并将其用作改善位置测量精度的基础。
在实施GPS差分测量之前,我们需要准备一些必要的设备。
首先是至少两个GPS接收器,每个接收器都需要有稳定的电源供应和对卫星信号敏感的接受能力。
其次,我们需要一台计算机或数据处理系统,用于接收和处理接收器所记录的数据。
最后,还需要一种数据通信方式,以便接收器之间能够传输数据。
接下来,我们需要采取一系列步骤来实施GPS差分测量。
首先,确定参考接收器的位置。
参考接收器是一个已知位置的接收器,它的坐标将用作基准来对比其他接收器的测量数据。
通常情况下,参考接收器会放置在一个已知坐标的地点,如测量标志物或已知地点的建筑物上。
接着,我们需要将所有接收器与计算机或数据处理系统连接起来。
这可以通过使用数据线或者蓝牙连接来实现。
确保所有接收器都能够与计算机或数据处理系统成功建立连接,并且能够传输数据。
一旦所有接收器都连接好了,我们就可以开始进行差分测量了。
在开始测量之前,确保所有接收器的时间都同步。
这可以通过接收卫星的时间信号来实现,或者手动将时间设置为一致。
开始测量时,让每个接收器记录接收到的GPS信号的时间。
时间记录的频率取决于需要测量的精度和精确度。
基于GPS和GSM定位车辆短信追踪系统设计

空间方面: 卫星星座主要存在着以下的参数,24个卫星,55度轨道的倾角,6个卫星轨道面,4颗卫星定位于每个轨道面上, 的卫星的高度,卫星星座的运行周期为11小时 分,载波频率 。在任何的地区和方位,都可以观测到四棵卫星,而且定位的精度准确。
地面控制部分:主要功能是需要对全球定位系统进行监测,并测量每颗卫星的位置,并以电文的手段发送给卫星,然后由卫星把取得地信息发送给用户,这就是卫星提供的信息。从整个控制部分可以得出:主控站1个、监控站5个和注入站3个。其中,主控站负责对监控站发出的信息进行收集,计算出各种轨道的参数,并把这些信息转发给卫星。监控站中配有P码接收机和精密时钟等装置,对于来自于卫星地信息进行监测,而且在每过十五分钟把取得地信息发送给相应的监测部门。
2.
本文说明的基本硬件方法是通过 系统模块、 移动模块和 的地理模块;软件方面是通过每个分支实现的不同功能模块,软件部分则是通过程序语句来沟通配合各个模块的不同功能并完成整体功能。
2.1车辆监控系统中关键技术
2.1.1 GPS定位技术
该系统是伴随现代高科技产品应运而生的的一个无误差、不间断和范围广的电子追踪跟踪、定位的多功能系统。GPS网络大体由三部分构成,通过GPS卫星部分构成的太空整体、由大量陆地站构成的控制部件和接受器件为主要驱动的用户设备,其主要可以实现以下的功能:
基于GPS定位信息系统的设计与实现 毕业设计
本科毕业设计(论文)题目:基于GPS定位信息系统的设计与实现学号: *****XXXXXXX姓名: XXXX 班级: XXXXX 专业:电子信息工程学部(院):工学部入学时间: XXXX 级指导教师: XXXX日期: 2017年 X月X日上海第二工业大学本科毕业设计(论文)毕业设计(论文)独创性声明本人所呈交的毕业论文是在指导教师指导下进行的工作及取得的成果。
除文中已经注明的内容外,本论文不包含其他个人已经发表或撰写过的研究成果。
对本文的研究做出重要贡献的个人和集体,均已在文中作了明确说明并表示谢意。
作者签名:日期:基于GPS定位信息系统的设计与实现摘要随着无线导航定位技术、网络技术、计算机通信技术、自动化和人工智能系统的飞速发展,使得GPS在很多领域都因其独特的优点而得到广泛应用,如广泛应用在土建测量、车辆查询与监控、工程测量、航空摄影测量、地壳运动监测、个人旅游及野外探险、紧急救助、飞机、轮船、车辆的导航与定位等各个领域,定位服务市场得到空前发展,目前市场上也存在一些定位系统绕开了无GPS 卫星定位系统信号的问题,使用蓝牙、射频识别、ZigBee、WIFI等技术,这些技术虽然可以提供较高精度的定位,但其不足之处在于只能应用在特定的设备上和特定的环境中,不仅安装复杂、费用高,而且应用范围狭隘。
如何扩大定位系统服务的应用范围,降低定位系统的部署成本,提高设备的利用率,使得定位系统应对突发事件的救援能力得以增强,在现实中具有非常重要的意义。
本设计是基于嵌入式系统和GPS模块等部件设计的一款定位信息系统,将接收到的数据进行读取和处理并将接收到的定位信息显示在液晶显示屏上,通过WIFI实现对定位信息数据的传输,其中WIFI选用ESP8266芯片,在硬件设计中,起通信桥梁的作用,通过HTML实现web网页在PC机端的定位信息的管理。
关键词:GPS;定位服务;液晶显示;WIFI;ESP8266Design and Implementation of LocationInformation System Based on GPSABSTRACTWith the rapid development of wireless positioning technology, wireless network, computer, automation and intelligent system makes the GPS in many fields because of its unique advantages and is used in various fields widely, such as land and engineering surveying, photogrammetry, crustal movement monitoring, engineering deformation monitoring, and personal rescue, and vehicles, aircraft, ship navigation and so on. Positioning market has been an fast development. There are some positioning systems without the satellite positioning system signal which use Bluetooth, frequency identification, ZigBee, WIFI and other technologies. Not only can these technologies provide high precision positioning but its shortcomings used in specific equipment and specific environment. What’s more, complicated installation, high cost, and narrow range make its applications are limited. What is important to enlarge the application industry and the scope of the location service, to reduce the deployment cost, improve the utilization ratio of the equipment and enhance the ability of emergency, How to expand the scope of application of positioning system services, reduce the deployment cost of positioning system, improve the utilization of equipment, making the positioning system responded to emergencies can be enhanced, which has a very important significance in reality.The design is based on embedded systems and GPS modules and other components designed a positioning system,The received data is read and processed and the received positioning information is displayed on the liquid crystal display screen, and the transmission of the positioning information data is realized by the WIFI which selects the ESP8266 chip, and design the hardware, WIFI plays a role in bridge through the web page manage the computer information.Key words: GPS; Location service; LCD; WIFI; ESP8266目录1绪论 (1)1.1本课题设计的背景 (1)1.2本课题的研究目的与意义 (1)1.3本课题的设计内容 (2)2系统定位方案的总体设计 (3)2.1定位信息系统的简介 (3)2.2定位信息系统的结构设计 (3)2.3定位信息系统的功能 (4)2.4系统软件开发环境的选择 (5)3系统硬件电路的设计 (6)3.1系统硬件整体设计 (6)3.2主控制模块 (6)3.2.1微处理器 (6)3.2.2液晶显示屏 (7)3.2.3电源 (8)3.3ESP8266芯片 (9)3.4GPS模块 (9)3.5串口电路 (11)4系统软件的设计与实现 (13)4.1软件的整体设计流程 (13)4.3串口通信程序设计 (15)4.3GPS数据接收程序设计 (16)4.4WIFI数据传输程序设计 (18)4.4.1WIFI的串口AT指令 (18)4.4.2WIFI的热点设计 (19)4.5Web服务网页的设计与实现 (20)5系统功能测试 (22)5.1系统硬件测试 (22)5.1.1GPS模块的测试 (22)5.1.2WIFI模块的测试 (25)5.2系统软件测试 (25)5.3系统最终实现的功能 (25)5.4实验结果及分析 (26)6结束语 (29)6.1小结 (29)6.2展望 (29)参考文献 (32)附录 (33)1绪论1.1本课题设计的背景GPS定位技术是目前正在快速发展中的最具有开创意义的高新技术之一,与此同时数据处理技术也在一直不断更新的状态之中,各系列、型号的GPS接收机生产厂商研制的处理软件各自具有各自不同的特色。
GPS差分定位原理与解算方法介绍

GPS差分定位原理与解算方法介绍导语:全球定位系统(Global Positioning System,简称GPS)已经成为现代社会中不可或缺的一部分。
它的差分定位原理和解算方法是GPS定位精度提高的重要手段。
本文将从基本原理、差分定位方法和解算流程三个方面进行介绍,希望能带给读者更深入的了解。
一、GPS差分定位的基本原理GPS差分定位技术主要通过消除卫星信号传输过程中的时间延迟和误差,提高定位的精度。
其基本原理如下:1.1 卫星信号传输的时间延迟在GPS定位过程中,卫星信号需要经过大气层的传输。
然而,大气层中存在电离层和对流层等不均匀介质,会导致信号的传输速度和路径发生变化,从而引起时间延迟。
这种时间延迟是影响GPS定位精度的主要因素之一。
1.2 接收机和卫星钟差接收机和卫星钟差也会对GPS定位的精度产生影响。
接收机钟差是指接收机内部时钟的不准确性,而卫星钟差是指卫星内部时钟的不准确性。
误差累积后,会使GPS定位出现较大的误差。
二、GPS差分定位的方法GPS差分定位的方法有静态差分定位和动态差分定位两种。
2.1 静态差分定位静态差分定位主要适用于定位场景相对固定的情况,如建筑物测量和基础设施监测等。
它的工作原理是通过一个称为参考站(Reference Station)的固定GPS接收机对已知位置进行定位,并计算多普勒、钟差和大气层延迟等误差参数。
然后,通过无线通信将这些参数传输给移动接收机,移动接收机利用这些参数进行定位。
2.2 动态差分定位相对于静态差分定位,动态差分定位更适用于移动环境中的定位,如汽车导航和船舶定位等。
动态差分定位的关键是实时计算接收机位置的误差参数,并将其发送给移动接收机进行定位。
通常,这种方法需要两个或更多的接收机组成一个虚拟基线,并使用这些接收机之间的数据进行定位。
三、GPS差分定位的解算流程GPS差分定位的解算流程包括差分基准站的建立、测量数据的采集和处理。
3.1 差分基准站的建立差分基准站是差分定位的核心组成部分,它记录了精确的位置和时间信息,并对卫星信号进行实时观测和处理。
GPS后差分处理系统_毕业设计
前言GPS(GlobalPositionSystem)即为全球定位系统的简称。
它的含义是:利用导航卫星进行测时和测距,以构成全球定位系统,它具有全球性、全天候、连续性、实时性导航定位和定时功能,而且具有良好的抗干扰性和保密性,能为各类用户提供精密的三维坐标、速度和时间。
近年来,随着GPS接收机性能和数据处理技术逐渐完善,其应用领域也不断拓宽。
GPS后差分处理系统的功能基于南方测绘公司的北极星9200 型GPS接收机,采用走走停停后处理差分模式。
由于不通过数据链实时传输数据,因此不会受到电磁波传播的影响,具有精度高,抗干扰性强,作用距离长等特点,适合于不需要实时处理的各项测量工作。
9200便携式后差分测量系统轻巧,便于携带野外输入方便,可直接输入属性采集数据自动进入南方CASS成图软件,无需转换。
后差分行业解决方案:▲国土资源部地籍处:土地权属调查,有力推动国土资源管理数字化;▲国土资源部地矿处:地矿资源调查,提高矿权管理工作水平,实现矿权登记坐标标准化、管理自动化、数字化;▲水利部门:江河、水库水面区域调查,库容调查,水土保持、水土流失调查;▲农场:土地面积测量,作物规划,农场的范围确定;▲交通部门:公路、铁路、各种管线普查;▲林业部门:各种植被覆盖面积的调查,林业资源调查;▲海洋管理部门:海洋区域面积测量,海洋资源调查;▲大规模小比例尺的绘制;等。
经过我们在学校内、河滨公园的多次的实验,我们得出了GPS 后差分在应用上得一些心得,使我们在应用得时候更加得心应手。
不过我们在许多地方还存在不足,在这一点我会继续努力探索。
在实习期间我们曾经做过多次数字化测图和矿区面积、距离测量等工作,在实践中我们发现,用GPS后差分作业,有着很多优势,在本文中我会一一做详细论述。
2008年1月在鲁山马楼乡的一个铁矿尾矿库测地形图,就是我们应用GPS后差分的一个成功例子。
另外2008年3月我们在汝洲运用这项技术测量两矿边界和与临近村庄的距离,精度良好,完全符合标准,很好的完成了任务。
差分GPS-INS组合定位定姿及其在MMS中的应用
差分GPS-INS组合定位定姿及其在MMS中的应用差分GPS/INS组合定位定姿及其在MMS中的应用摘要:随着现代测绘技术的发展,利用差分GPS和惯性导航系统(INS)进行组合定位定姿已成为一种有效的测绘方法。
本文将详细介绍差分GPS和INS的原理和工作机制,以及它们在组合定位定姿中的应用。
进一步探讨了差分GPS/INS组合定位定姿在移动测绘系统(MMS)中的具体案例,并对其在实践中的优势和挑战进行了讨论。
一、引言在现代测绘领域,获取精确的位置和姿态信息对于地图制作、三维建模以及地质勘探等应用至关重要。
相比传统的GPS定位技术,差分GPS/INS组合定位定姿技术结合了GPS和INS的优势,能够提供更精确和稳定的位置和姿态信息。
二、差分GPS和INS的原理与工作机制2.1 差分GPS定位原理差分GPS定位是一种利用测量基准站和流动测站之间的距离差异来消除GPS定位误差的方法。
差分GPS接收器接收到基准站发送的GPS信号,并与基准站上的接收器进行实时比对和纠正,从而消除了大气延迟等误差,提高了定位精度。
2.2 INS定位原理惯性导航系统(INS)通过测量三个加速度和三个角速度来确定运动物体的三维姿态和位置。
INS主要由加速度计和陀螺仪组成,通过对运动器件的力学特性和物体运动学原理的分析,从而实现对物体的位置和姿态进行测量。
三、差分GPS/INS组合定位定姿的方法3.1 状态预测差分GPS/INS组合定位定姿首先通过INS测量得到初始位置和姿态信息,然后通过状态预测方法对未来的位置和姿态进行预测。
常用的状态预测方法包括标准卡尔曼滤波和扩展卡尔曼滤波等。
3.2 测量更新在状态预测的基础上,差分GPS/INS组合定位定姿将基准站的GPS测量值与预测值进行比对和纠正,从而获得更精确的位置和姿态信息。
这一步骤可以通过差分GPS数据与INS数据进行加权融合实现。
四、差分GPS/INS组合定位定姿在MMS中的应用4.1 建筑物测绘差分GPS/INS组合定位定姿技术在建筑物测绘中具有广泛的应用前景。
GPS实时差分定位解决方案
精品好资料——————学习推荐
GPS实时差分定位解决方案
实时差分定位是指在测量点上实时得到高精度的定位结果。
这种模式的具体方法是:在一个已知测站上架设GPS基准站接收机和数据电台,连续跟踪所有可见卫星,并通过数据电台向移动站发送差分改正数据。
移动站接收机通过移动站数据电台接收基准站发射来的差分改正数据,并在移动站接收机内部进行处理,从而实时得到移动站的高精度位置。
实时差分定位分为伪距差分和载波相位差分。
伪距差分也叫DGPS,精度为亚米级到米级,这种方式是基准站将基准站上测量得到的RTCM数据(伪距改正数)通过数据链传输到移动站,移动站接收到改正数后,自动进行解算,得到经差分改正以后的坐标。
载波相位差分也叫RTK,它的工作思路与DGPS相似,只不过是基准站是将载波相位改正数发送到移动站(而不是发射伪距改正数),移动站接收到改正数后,自动进行解算,得到经改正以后的比DGPS高得多的实时测量结果。
这种方法的精度一般为2厘米左右。
配置
方案说明
1、方案中GPS接收机和GPS天线可以选择单频或双频,根据所选型号的不同,可以实现0.45米、0.2米、0.02米三种定位精度。
2、应用领域:可用于高精度位置采集、轨迹记录、动态目标位置监控等领域
1 / 1。
基于公网的差分GPS技术的开题报告

基于公网的差分GPS技术的开题报告一、选题背景全球定位系统(GPS)是一种卫星导航系统,用于确定地球上任何位置的准确性,它使用一组卫星以及在地面上接收信号的设备来确定一个接收器的位置,速度和方向。
尽管GPS是高精度导航系统,但在战争、灾难和紧急情况下,总是需要更高的定位精度。
为了满足这种需求,差分GPS技术应运而生。
差分GPS技术利用同时接收到的两个GPS信号之间的微小时间差来确定位置。
这个微小时间差可能源自卫星的时间振荡器或是信号传输通道的延迟,在精度较低的情况下,两个接收器可能会同时接收到同样的误差。
差分GPS技术通过使用于参考站的接收器来消除这些误差,因此可以获得更高的精度。
二、研究目的与意义本研究旨在基于公网的差分GPS技术,提高GPS定位精度和可靠性,以满足各种需求。
通过公用网建立的差分GPS站点集,提供高精度地、实时差分GPS参考信号给广大用户,不仅提高了GPS的应用价值,创造了更多的关键领域应用,同时也可用于解决卫星导航系统在城市峡谷、叶面浓密的森林等区域接收信号不良的问题。
三、预期研究内容1. 建立公网差分GPS站点集:该站点集包括由一组分布在特定地点的接收器组成的静态接收器网,将其与互联网网络相连,并通过全球星球定位系统(GNSS)计算机上载差分数据。
2. 开发基于Web的应用程序界面:提供基于Web的应用程序界面,与用户的数据和解决方案进行交互,并提供实时位置和时间数据,以及作为可视化地图的地面基础信息的图像。
3. 结合差分GPS和GNSS:将该方法与全球导航卫星系统(GNSS)结合使用,以获得更大的优势,精确计算差分节点周围的卫星位置。
使用自适应滤波算法,对接收器的坐标进行计算,从而实现对误差的有效控制。
4. 建立众包数据匹配算法:利用大量用户反馈收集的生成的卫星信号质量数据,建立统计模型,匹配不同用户之间的感知信号质量,以增加公网的可靠性。
四、创新点1. 建立公网差分GPS站点集:该站点集可以提供较高的精度和重复性,同时具有较低的维护成本。
【doc】实时位置差分GPS的设计与实现
实时位置差分GPS的设计与实现]994年8月西北工业大学Ag.1994第12卷第3期JOURNALOFNORTHWESTERNPOL YTECHNICALUNIVERSITYV o1.I2No.3;二时位置差分GPS的设计与实现王永生国摘要本文研究实时位置差分GPS的设计和实现方法.该系统采用基准台广播位置修正量.用户进行实时敷据处理的差分GPS方案.其主要优点是定位精度高.修正速度快,系兢完善性好,设奋简单,使用方便.该系统的基准台可以手控删除不健康卫星.用户能自动选择与基准台相同的卫星,这不仅能保证差分定位精度,还能改进系统的完善性.文章分析了位置差分GPS的定位误差,培出了测量结果.理论分析和测试结果都表明,该泉统的差分定位精度比GPS直接定位高一个敷量圾,静态定位误差(2-5)m,动态性能优良.关键同奎球卫星导航糸兢(GNSS),差别GPS(DGPs),定位误差~1~一引言全球定位系统(GPS)提供两种精度服务:其—是精密定位服务(PPS),使用P码(或Y 码),只供美国及其盟国军事部门使用;其二是标准定位服务(SPS).使用C/A码.对全世界开放.美国为了自身利益,采取选择可用性(sA)措施.人为降低了SPS精度.有SA时.SPS的水平误差为100m(2dRMS),垂直误差为156m(2a).对于飞机进场着陆港口船舰导航,车辆精确定位,导弹轨迹测量.五人机导航和飞行控制等应用领域.无论是否有SA影响.SPS的精度部不能满足要求.采用差分技术提高SPS的定位精度,是近年来世界各国竞相研究的课题.差分GPS(DGPS)不会损害美国的利益.美国没有必要也无法限制DGPS的研究与应用.普遍认为全球卫星导航系统(GNSS)将逐步取代其它无线电导航系统.美国航空无线电技术委员会(RTCA)在关于实现这种过菠的报告中,说明了差分技术的必要性【t1.本文在位置差分GPS误差分析的基础上.提出了这种系统的设计方案.对于位置差分,基准台和用户选用相同的卫星是必要的,所设计的基准台和用户软件成功地解决了这一问题,既保证了差分定位精度,又改进了系统完善性.该系统特别适合飞机,船舰.车辆等动态用户的精确导航.1总体设计1,1差分方式选择DGPS方式按修正量类型,数据传输方向和处理地点可分为4种方式:(1)基准台广播伪距修正①西北工业大学副教授本文收到口j瓠:I993年9月15口实第3期王永生:宴时位置差分GPS的设计与实现?355?量,用户处理数据:(2)基准台广播位置修正量,用户处理数据;(31用户向基准台传逑伪距数据,基准台处理数据;(4)用户向基准台传送位置数据,基准台处理数据.对于多用户,方式(3)和(4),基准台需要册大型高速计算机,而且用户数且有限;若用户需要实时定位信息,则还需要上行数据链,这样不仅使设备复杂,而且给用户的电磁兼容性增添麻烦.所研制的系统主要应用于飞机进场着陆,港口船舰导航,车辆精确定位无人机导航和飞行控制等,在这些应用中都是需要实时定位信息的多个动态用户,显然后两种方式是不可取的.第(】)种方式,基准台广播伪距修正量,用户处理数据.在不同时间,基准台的可见星数目不同,耍发送的伪距及其变化率修正量的数目不同,这样传送一帧修正量的时间也不同.按照美国海运无线电技术委员I~(RTCM)l04专业委员会关于差分GPS的推荐意见f2】,基准台使用16种电文,第一种电文是伪距及其伪距变化率修正量,当可见星为4颗,7颗和l1颗时,传送一帧电文所需的平均时问分别为6,23s,l0.22s和161ls.这种差分信号格式复杂,帧长度比较长而且不恒定.第(2)种差分方式,即基准台广播位置修正量,用户处理数据.这种方式差分数据格式觯,杖长度短而且恒定,差分修正快.为了保证差分定位精度,用户选星应当与基准台选星一致.研制的用户自动控制选里软件,可使用户选星与基准台选星相同;基准台手控选里软件,可以删除不健康卫星.这两个软件不仅保证了差分定位精度,而且改进了系统的完善性.1.2系统硬件该系统由基准台和用户两大部分组成,用户数目没有限制.差分数据链选用国产车载型U波段无线电话机,调制方式采用FSK-FM.基准台由TANS]]型GPS接收机,天线及其前登放大器,RS422/RS232接口转换器,数据链发射机及天线,FSK调制器和USER386型便携式微型汁算机组成.计算机把GPs接收机输出的位置参数的测量值与基准台位置参数的实际值不断进行比较,得到位置修正量,并按设定的数据格式产生差分数据.该数据通过FSK调制器送至数据链发射机.用户由TANSII型GPS接收机天线及其前世放大器RS422/RS232接口转换器数据链接收机及天线,FSK解调器和USER386型便携式微型计算机(现已研制成功代替鼢fI 算机的单片计算机板)组成.计算机把由GPS接收机输出的直接定位参数和数据链接收机输出的差分数据进行处理得到校正后的用户位置数据.计算机控制GPS接收机,使其选择与基准台相同的卫星.1.3差分信号特性差分数据采用空间直角坐标系或大地坐标系,帧长度恒定.帧内容包括:帧同步字,t,△,△y,△:和星号或者是杖同步字,f,△Lo.△L口,△f和星号.还可传迭速度修正量.若耍构成差分网,还需要增加基准台标志.1.4系统软件系统软件包括基准台软件,用户软件和数据处理软件.基准台工作软件主耍功能包括:注入基准台位置参数实际值;删除不健康卫星i从接收机提取时间,位置,速度,工作模式,选用的星号和几何精度系数;计算位置修正量;并按设定的数据格式产生差分数据坎信号,送至数据链发射机;显示有关参数;生成需要存储的数据文件用户工作软件主要功能包括:从GPS接收机提取时间,位置速度,工作模式,选用星号和几何精度系数;从数据链接收机提取位置修正量基准台选星号和差分数据经时;计算用户差分校正后的位--=——=—————————.兰堡竺!兰挫参数(可用空间直角坐标系大地坐标系或以墓准台为原点的极坐标系表示);自动控制GPs.机,使其与基准台选星—致;显示有关参数,生成需要存储的数据文件.数据处理软件用于事后处理,主要功能包括对原始数据进行坐标变换,平均值绝对误差标准偏差和最大残差,绘制备参数曲线和用户姚2误差分析2.1GPS定位解算在空问直甩坐标系中用户位置的解算可用图1说明.,为第j颗卫星.JJ,,=.匙.的坐标分量,r..为地心到.的距离矢量.u是月I户.,.堤的坐标分量?r是地恻用户u的距离矢量.r.为用户到的距离矢量.其方向余弦为e.三个矢量的关系如下.=一-《1)r是用户到的距离,它,的模.接收机测得的用户到的伪距为.=,.+,."1-,,则IPf一,.一,(2)式中:,.为用户钟差对应的距离,,为.钟差对应的距离..r/r.为用户到.的单位矢量.式(1)两边同乘以e.,并将式(2)代^得err一-=eJr"+,一f当i一1—4时,可把上式写成矩阵形式图1定位解算图一矩阵G和表示的部是用户和卫星之间的几何关系.式(4)可简化为Gu:AS一,,则U=G~[As一0)■t第3期王永生:实时位置差分GPS的设计与实现?357?2.2GPS定位误差用户直接定位时,式(5)中各矩阵都存在误差,按误差传递公式中的微小误差准则,矩阵G和A中的误差可以忽略.则GPS直接定位误差为△c,=G一[AAS一△1(6】式中:AS为卫星状态误差阵.它包括星斜误差,星历误差和选择可用性(SA)误差,△为伪距误差阵,它包括电离层效应和对流层效应引起的测距误差.接收机噪声和通道引起的测距误差以及多径效应引起的误差.(6)式表明GPS定位精度与G密切相关.几何精度系数GDOP值越小.定位精度越高.2.3位置差分GPS误差所研制的实时位置差分GPS把基准台GPS接收机收到的位盐参数测量值c'与基准台位置参数实际值相减,得到位置差分修正量△=,一..基准台广播该修正量.差分用户把GPS接收机收到的位置参数与△相减-得到差分校正后的用户位置参数=△.设c,为用户位置参数真值,则位置差分定位误差'△U"=U"一U∞=U4一△U一U∞=Av4一△U式中:△=U一U为用户无差分校正时的位置误差.把式(6】代人上式可得△=G.【JASJ一△1一G_.【AS一△,】=G'AAS—G'△一G'A,AS,+G'△,(8)当用户和基准台选用相同的卫星时.△=AS,=△.因用户与基准台的距离同它们与卫星的距离相比很小-故GJ≈G,≈G?A≈A,≈A-式(8)的第一三两珂抵消-即△c,一G(AP,一△,J)(9)上式中△,.△分别为基准台和用户的曲距测量误差.它们包括电离层效应对流层效应接收机噪声,接收机通道以及多径效应引起的测距误差.当用户与基准台在地面相距500kin吨卫星与两者连线的夹角不大于1.5,此时电离层效应,对流层效应引起的用户和基准台距测量误差相近.GPS和DGPS的定位精度估算见表1【3~41.表中各项误差都用标准偏差表示.UERE为用户等效距离误差.水平误差的水平精度系数HDOP=1.5.垂直误差的垂直精度系数VDOP;2.5.185km和926km为用户与基准台之间的距离.表1定位误差估算DOPS(m)GPS(m)185km926km星钟误差3.10O星历误差2.80.10.5SA误差2800电离层传播误差9.12.24.9对漉层传播误差1.80.60.9接收机噪声误差3.1313.1接收机通道误差0.60.60.6多路径误差3.13.13.1UERE30'5.06.7水平定位误差457.510垂直定位误差75l217西北工业大学第12卷3测试结果1992年11月12日,在国家标定的测量点上,对该系统进行了静态测量和动态测试.坐标系采用空间直角坐标系WGS-84,测量点.z误差不大于6ram.测量结果表明,该系统定位精度比GPS直.接定位精度高一个数量级,静态定位误差为(2~5)m.在作者研制的GPS/数字地图组台系统中,已采用了这种差分技术?车载试验时,车速为(20~100)kin/h,数字地图上显示的汽车位置始终在给定路线.上.试验结果表明系统动态性能优良.表2和图2是其中一个点的测试结果.表中起始和终止时间为GPS时间.测试日期起始时间终止时间时阐问隔数据总数l992.11.12364023&364554&53ls623个4结论表2测试结果绝对误差171标准偏差mGPSDGPSGPSDGPs-9.062—045l10.3692.619-6.580一088018882329643.092I26227.4995.760水平32.9o21463247583.84l垂直22.558O.15622.8785606图2测试结果由误差分析和测试结果可见,耍取得良好的位益差分效果,系统应满足3点要求:(1)基准台应选用最佳星座,取得最小的GDOP值;(2)用户应选用与基准台同样的卫星;(3)用户和基准台距离增大,差分定位误差也增大,当两者距离小于500kin时,位置差分的定位精度比GPS 直接定位可提高一个数量级.此外若接收机噪声经过滤波,采用多蹄径抑制天线,则差分效果更加明显.该实时位置差分全球定位系统具有下述特点:该系统定位精度比GPS直接定位高一个数量级,静态定位误差(2~5Ira.车载试验表明.系统动态性能优良.差分数据格式简单,帧长度短而恒定,差分修正速度快,差分数据通过平滑处理,提高了定位精度.基准台可手动控制删除不健康卫星,用户可自●t第3期王永生:实时位置差分GPS的设计与实现?359-动选择与基准台相同的卫星,从而保证了差分定位精度,并改进了系统的完营睦.数据链可使用普通的无线电话机.采用FSK-FM调制,抗干扰能力强.研制的硬件性能好,体积小,重量轻,价格低.设计的软件性能优良.工作可靠.操作方便.基准台结构轻巧,架设维修方便,实际坐标注入容易,便于野外基准台(例如无人机测控站)使用.该系统可用于飞机船舰,车辆等动态用户的精确导航,也可用于油田钻井等静态用户的精确定位.参考文献【I1RTCATaskForceReportOlltheG]obalNavigationSate]]iLos(GNSS)TransitionandI mplementaLionStrategy1992:7l1.[21KalafusRM.程安真译.(RTCM)1o4专业委员会关于差分GPST作的推荐意见导航1988,(2):9~20i31BrownA.ExpendedDifferentialGPS.Navigation.1989,36(3):265285 BlaekwcllG.魏还毅译.差分GPS综述.导航,1987,(3):2126 DesignandImplementationofReal-timePositionDifferentia】GPSWangY ongsheng,DepartmentofElectronicEngineering,\NorthwestcrnPolytcchnica1University,Xian710072J Adesignandimplementationmethodofreal—timepositiondifferentialGPS(GlobalPositioningSys?tom)isdiscussedinthispaper.ThedifferentialGPS(DGPS)schcmcadoptedinthissystemdiffersfrompseudorangeDGPS mainlyinthatreferencestationbroadcastspositioncorrection——instcadofpscudorangecorrection——needcdforreal—timedataprocessingofusers.Thissystemhasthefollowingmainadvantages:highpositionin gaccuracy,fastcorrection,goodintegrity,simpleequipmentandeasyoperation.Inthesystem,r eference stationcandeletemanuallyanunhealthysatelliteanduserscanchooseautomaticallythosesat ellitesse?lcctcdbythereferencestation,sothatnotonlythedifferentialpositioningaccuracycanbeensu red,butalsotheintegritybeimproved. InthepaperthepositioningerrorofpositionDGPSisanalyzedandtheexperimentedresultsar egiv-cn.Fromthetheoretlealanalysisandtheexperimentedresults,weeanseethatthepositioninga ccuracyofthisDGPSismuchhigherthanthatofGPS,itsstaticpositioningelTrOfcanreach(2~5)m.itsdynamicfeaturc3arcalsoexecllcnt.KeywordsDifferentialGPS(DGPS),positioningerror。
采用GPS差分改正数提高手机导航定位精度
∭ ∑ˊ ∳ ∰ ˇ ∢‟ ∳ ˇ ∳∰ ∳ ∰ ≏ ˋ ∑ æ ’
⇌ ⇌ ∰,
∭∑ ˇ ∳ ˇ ’ ∰ ˙
∰ , ∰, ≏
∢
Байду номын сангаасˋ ɶ
∳ ∑∰ ˇ ∳∯ ∑ ∑ˇ ∳∰ ‟
( ,T ,S ) C o l l e eo fS u r v e i n n dG e o I n f o r m a t i c s o n iU n i v e r s i t h a n h a i 2 0 0 0 9 2,C h i n a g y ga g j y g : ≏‟ ˇ ∑ˇ T h e c u r r e n t s m a r t h o n e i s c a a b l eo f l o c a t i n t h eu s e r sw i t ha na c c u r a c f a b o u t 1 0m e t e r s . F o r t i c a l s e u d o r p p g yo y p p ,t ,s , h em e a s u r e m e n t sa r eu s u a l l o n t a m i n a t e db t m o s h e r i ce r r o r a t e l l i t eo r b i te r r o r a n e b a s e ds m a r t h o n ep o s i t i o n i n yc ya p g p g s a t e l l i t ec l o c ke r r o ra n dc e l l h o n e i n t e r n a l n o i s e . S o i t i ss i n i f i c a n t f o r e n h a n c i n h ep o s i t i o n i n c c u r a c . B a r r i n u tD i f p g gt ga y yc y go ( ) , f e r e n t i a lGN S S D GN S S c o m u t a t i o n i nt h ec o o r d i n a t ed o m a i n t h ea l o r i t h mu t i l i z e s t h ep s e u d o r a n ec o r r e c t i o n s t oe s t i m a t e p g g ,a t h ec o o r d i n a t ec o r r e c t i o n s n da l i e s t h ec o o r d i n a t ec o r r e c t i o n st ot h e i n i t i a l c o o r d i n a t e so b t a i n e df r o mt h eGN S Sc h i s e t i n p p p t h es m a r t h o n e .T h e f i e l dt e s td e m o n s t r a t e s t h a t t h ed i f f e r e n t i a l s o l u t i o ne n h a n c e s t h ep o s i t i o n i n c c u r a c 3%i nt e r m so f p ga yb y1 ,a 3 De r r o r n dt h ep e r f o r m a n c e sv a r nd i f f e r e n tp h o n e sd u et od i f f e r e n tc h i s e td e s i n st h a tg i v er i s et om o d e le r r o r s i nt h e yi p g c o r r e c t i o np r o c e s s i n . g :G ;d ; P S;s i n l er e f e r e n c es t a t i o n i f f e r e n t i a l c o r r e c t i o n s s m a r t h o n e l o c a t i o n g p æ˙ ∑‟
GPS差分 关于MSAS 系统信号探索

GPS差分关于MSAS 系统信号探索
今天测试用u-center软件M-1000的漂移情况,发现有个编号129号的卫星在空中静止不动。
打开orbitron软件,发现GPS卫星中并没有这颗编号129号的卫星,感觉奇怪。
于是仔细看了一下u-center软件,意外发现这竟然是一颗MSAS系统卫星的信号。
MSAS系统,是日本搞的,用于提高GPS定位精度的系统。
具体可以看这个文章
另外上文提到的3个系统,覆盖的区域示意图如下
这颗编号129的MSAS卫星,在我这里接收信噪比达到了36DB
虽然信号条显示是蓝色而不是绿色,但U-center软件明确显示出了定位状态为DGPS。
差分式GPS
GPS定位原理
• GPS通过测量卫星和接收机之间无线电信号(GPS卫星 信号)传输所花费的时间来确定卫星和接收机的距离。 无线电波以光速传播,大约每秒30万公里的速度。因 此,如果信号从卫星到接收机的时间量是已知的,卫星 到接收机的距离(距离=速度×时间)可以被确定。如
果信号发送和收到的时间确定,信号的传输时间就能确
-------------------
差分式GPS系统的设计及数 据分析
---系统设计
全球定位系统(GPS)
• GPS是英文Global Positioning System的简称, 即全球定位系统。 • GPS由三部分组成:空间部分—GPS星座(GPS星座 是由24颗卫星组成的,其中21颗是工作卫星,3 颗是备份卫星);地面控制部分—地面监控系统; 用 户设备部分—GPS 信号接收机。 • 它可以为地球表面绝大部分地区提供准确的定位、 测速和高精度的标准时间。 • 在裸眼可视位置GPS卫星信号产生的定位精度为 50到100米。当使用差分技术时,用户可以 得到精度为5米以下的定位。
差分定位示意图
GPS卫星 信 号 G正参数
改正参数 无线发送
GPS接收机
设计流程
• 1.一个已知确定地理位置的点。 • 2.在该点上设置基准站。 • 3.接收GPS定位信号,已知该位置精确坐标,可以由此计 算出定位改正参数。 • 4.将改正参数通过无线电发送到目标定位点。
定。
GPS定位主要误差来源 • 大气延迟(电离层和对流层延迟)
• 卫星轨道误差 • 卫星钟差
• 多径效应
差分式GPS的定位方法
• 根据已知精确坐标的基准站,计算出基准站到卫星的距 离改正参数,并由基准站实时地将这一参数发送。一定
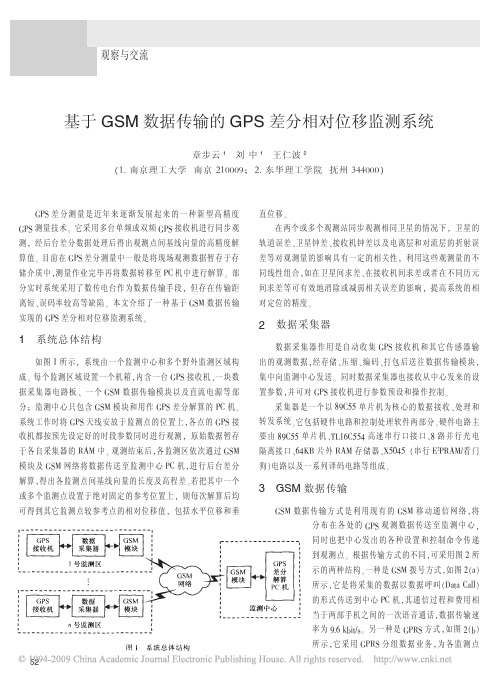
基于GSM数据传输的GPS差分相对位移监测系统
创我科技中标北京移动业务报表系统项目
日前 ! 创我科技继建设中国移动集团公司统计查询系统之 后 ! 再次顺利中标北京移动的业务报表 系 统 & 含 LQ( $ 项 目 ! 该 项目总投资 0 OOO 多万元 % 北京移动为减轻 RL(( 系统的工作 压力 ! 通过从 RL(( 系统等读出数据 ! 形成 LQ( & 中间数据存 储 $! 然后生成业务报表系统 ! 其核心工作是建立一个 RL(( ’ 网 管等系统数据的数据仓库系统 ! 并与现有的经营分析系统进行 整合 ! 准确生成各种业务报表 %
#&
("
电信科学 !""# 年第 ! 期
点数据的接收 ’ 监测参数的设置 ’ 差分 ’$( 基线解算 ’ 监测数据 和监测结果的存储以及位移数据的图形显示等工作 " 整个处理软件在 GA=C:HB 环境下 ! 采用 3AB9<> #IJK 面向 对象 &LL$ $ 的高级语言进行编程 " 开发过程中充分利用 LL$ 环 境中对象的封装和继承特性 ! 建立完整的数据和文件结构 ! 结合 消息和多任务机制 ! 实现数据传输 ’ 处理和显示的实时性 " 该软件系统分为 5 个模块 ( 数据文件管理模块 ’ 串行数据通 信模块 ’ 观测参数设置模块 ’’$( 基线解算模块及监测结果显示 模块 ! 如图 M 所示 % ’$( 差分解算模块是软件的核心部分 % 解算 可生成由各观测点基线构成的监测网图 ! 各观测点的位置坐标 存入观测结果数据库中 % 只要上述各项设置参数预先配置好 ! 后续的每次观测数据处理过程可自动进行 % 与中心之间建立起一个无线分组数据传输网络 ! 且该网络在协 议层采用 "#$%&$ 协议 ! 因此各采集终端无需依次排队拨号 ! 能 边观测边传送数据 " 这两种方式均可构建成一 # 中心 $ 对多 #采集 器 $ 的数据传输网 %
基于差分GPS相对定位的方法探究
基于差分GPS相对定位的方法探究邓潇【期刊名称】《价值工程》【年(卷),期】2011(30)20【摘要】GPS has been deepened into the mapping, navigation and communication and other fields comparing with positioning technology, It is applied extensively, especially after the policy of SA and AS be cancelled by the US government, for example, to measure vehicle and vessel formation, such as flight and navigation, the relative position.In this paper, based on the basic principles of GPS pseudo-range positioning, the problems of the relative position between the known and unknow location information are studied.%GPS相对定位技术已深入到测绘、导航、通讯等的各个领域,尤其在美国政府取消SA和AS政策后,更是得到了广泛的应用.如测量飞行器和船舶编队的飞行及航行时的相对位置.本文以GPS伪距定位基本原理为基础,针对已知位置信息目标和未知位置信息目标之间的相对位置问题进行了探究.【总页数】2页(P125-126)【作者】邓潇【作者单位】海军航空工程学院,烟台,264000【正文语种】中文【中图分类】TP399【相关文献】1.基于GNSS动动差分相对定位方法的研究与探讨 [J], 汪捷;徐冠楠2.GPS差分相对定位应用于航天器自主交会对接的研究 [J], 范利涛;吴杰;汤国建3.一种GPS载波相位差分相对定位算法 [J], 王艳丽;雷继兆;赵笛4.基于差分双向测距协议的两飞行体相对定位算法 [J], 江涛;陈卫东5.基于北斗差分的多目标协同相对定位技术 [J], 孙伟玮; 王晓旺; 原彬因版权原因,仅展示原文概要,查看原文内容请购买。
差分GPS导航系统的设计

差分GPS导航系统的设计
周永余
【期刊名称】《海军工程大学学报》
【年(卷),期】1993(000)001
【摘要】本文详细地介绍了差分GPS导航系统的设计方法。
试验结果证明了该方法是正确可行的。
【总页数】6页(P21-26)
【作者】周永余
【作者单位】海军工程学院舰船电工电子工程系
【正文语种】中文
【中图分类】E273-55
【相关文献】
1.论差分GPS导航系统的技术指标和运动功能 [J], 陈俊勇
2.基于GPS导航系统的伪卫星信号发射器设计 [J], 黄桂;纪元法;孙希延
3.一种制导炸弹MINS/GPS导航系统误差分析与分配 [J], 孔星炜;郭美凤;马芮;董景新
4.一种基于北斗/GPS导航系统的110报警软件平台新设计 [J], 李德志;黄旭方;张发;;;
5.资源一号02D卫星双频GPS导航系统容错设计 [J], 王建;赵里恒;武小栋;胡萍;苏莹
因版权原因,仅展示原文概要,查看原文内容请购买。
差分gps——精选推荐
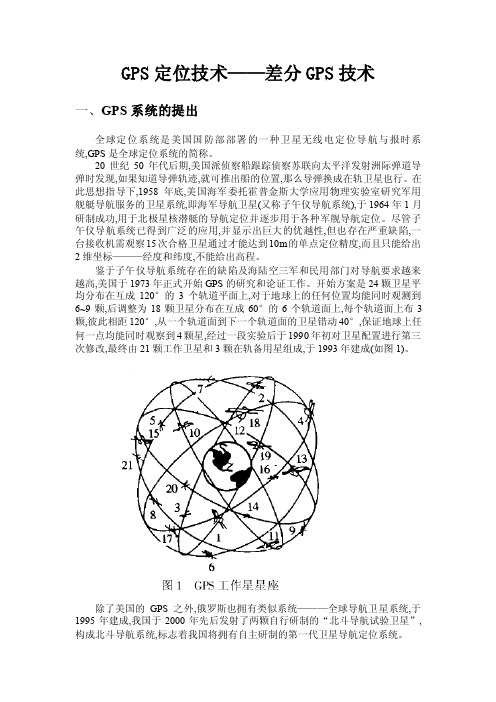
GPS定位技术——差分GPS技术一、GPS系统的提出全球定位系统是美国国防部部署的一种卫星无线电定位导航与报时系统,GPS是全球定位系统的简称。
20世纪50年代后期,美国派侦察船跟踪侦察苏联向太平洋发射洲际弹道导弹时发现,如果知道导弹轨迹,就可推出船的位置,那么导弹换成在轨卫星也行。
在此思想指导下,1958年底,美国海军委托霍普金斯大学应用物理实验室研究军用舰艇导航服务的卫星系统,即海军导航卫星(又称子午仪导航系统),于1964年1月研制成功,用于北极星核潜艇的导航定位并逐步用于各种军舰导航定位。
尽管子午仪导航系统已得到广泛的应用,并显示出巨大的优越性,但也存在严重缺陷,一台接收机需观察15次合格卫星通过才能达到10m的单点定位精度,而且只能给出2维坐标———经度和纬度,不能给出高程。
鉴于子午仪导航系统存在的缺陷及海陆空三军和民用部门对导航要求越来越高,美国于1973年正式开始GPS的研究和论证工作。
开始方案是24颗卫星平均分布在互成120°的3个轨道平面上,对于地球上的任何位置均能同时观测到6~9颗,后调整为18颗卫星分布在互成60°的6个轨道面上,每个轨道面上布3颗,彼此相距120°,从一个轨道面到下一个轨道面的卫星错动40°,保证地球上任何一点均能同时观察到4颗星,经过一段实验后于1990年初对卫星配置进行第三次修改,最终由21颗工作卫星和3颗在轨备用星组成,于1993年建成(如图1)。
除了美国的GPS之外,俄罗斯也拥有类似系统———全球导航卫星系统,于1995年建成,我国于2000年先后发射了两颗自行研制的“北斗导航试验卫星”,构成北斗导航系统,标志着我国将拥有自主研制的第一代卫星导航定位系统。
二、GPS系统的组成GPS系统由导航星座、地面台站和GPS接收机3部分组成。
导航星座由21颗工作星和3颗备用星,分布在6条轨道上,轨道呈圆形,偏心率为0·01,轨道高度20200km,倾角55°,运行周期为12小时,每颗星以1575·42Hz和1227·60Hz两种频率为军事用户播发加密的高精度导航数据(P码),定位精度可达10米,测速精度0·1m/s,授时精度为10ns,同时以1575·42Hz的频率为民用用户播发精度较低的导航数据(C/A码),定位精度100米。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
l9 99
【】戟佳, 戴卫恒 , 1单片机 C语言应 用程序 设计实例精讲 . 4 5 北京 【】D IB 0 5 S 8 2 技术 资利手册 .2 ( . (3 ) )
电路结构简堆、检测准确 、稳 定忡好 ,实现 了粮仓管理的 自动 化、
维普资讯
遮过 墨
J 单片机实现渝度转换并 读取濡度数值f程 序流程 图如图 3。 = } { f j () 4 数掘处理子 序 :比较濡艘 预设值 和实际值的大小.产生 各个 电 器 设备 的 启停 及 声 光报 警 信 ‘ 。 () 5 通信子程序 :按照粮仓 的不川.每个单片机系统分配一 个地 址 , 当主 机 向 备从 机 发送 地 址 时 , 各从 机 先 判 断送 来 的地 址 是 甭 是奉仓地址,若是 .划阳土机 发送 本仓温 度数据。 主机通信 时. 先发出所选仓的地址 ,在得到该从机的确 认应答后,开始接收温度 数据,备仓的温度数据 长度 已行入主机。
M A Fa .M A i c o ng Jn- ha
Hale Waihona Puke ( o lg f Co u e ce c ,Ya g z ie st , C l e o mp t r S i n e e n te Un v r i y
2 基 本 原 理
2 1 差 分 GPS .
Jn z o 3 0 3 Chn ) i g h u 4 4 2 i a
智 能 化 。 @
参考文献
作者 简介 :杨仁弟. 男.硕 士,烟台大学机 电汽车工程 学院教师
文章编号 : 1 7 ・0 12 0 )3 0 3 -2 6 11 4 (0 7 0 — 0 0 0
基 于 SMS 的 GP S差 分 定位 系统 设 计
王 月浩 ,张 红 民 ,马 芳 ,马 金 超
度。
关键词:差分定位:全球移动通信系统 ( M)短 消息服 务 ( M ) R GS : S S; M A 中图分类号: T 3 8 1 P 7 文献标识码 :A P 6 ,; 2 3 T
T e d in o h sg f DG S p st nn P o i o ig i s se y t m a e n SMS b s d o
( 长江 大学 计算机 科 学学院 ,荆 州 4 42 ) 30 3
摘要 :设计了一种 GP S伪距差分定位系统 .使用 GS 网络 的短消息服务作 M 为差分系统基站和用 户终端之间 的数据传输方式 ,用户终端使用 A M微处 R
理器进行控制 。实验结果表 明其 运行稳 定、能够 提供 2 5 的平面定位精 -m
5 结 束语
数字温度传感器 DS1B 0采用 1wi 82 - r 术来实现信号 的双向 e技 传输,接 口简单 ,仅刖 一 I 口线 就完成 了数据 和时钟的传输 。 条 / O 4仅 省 了 片机的 I 口线 .I 且减少 了 A/ 器件,降低 了成 . / O 『 J l D 小。凶此该器件具有极 高的性能价格 比,在多点温度测量控制系统 的应用前景非常的广阔。小文 j DS1B2 8 0的粮仓温度测量 系统
Ab t c : A s u o r n e i e e t l l a Po io ig s r t p e d —a g d f r n i G ob l a f a st n n Sy t m i i se s p e e t d i u e t e Sh r r s n e . t s s h o t e s g S i e o lba y t m or M s a e er c f G o lS s e f v Mo l Co m u ia i n t c m m u ia e b t e t e r f r n e bi e m nc t s o o o nc t e we n h e e e c
19 . 9 7
图3 实现温度转按 、渍默温度数值程序流程图
【】何立 民 . 1 单片机应用技 术选编 . 北京 :北京航 航 天大学 出版 社 【1李正军 . 2 计算机测控系统设计与 f. 应f 北京:机械-,l版社. 2 0 】 EI f kL 03 【】阳宪惠 . 3 现场 总线技 术及其应用 . 北京:清华大学 …版
W ANG Yue h o - a ,ZH ANG o g. i 。 H n m n
% 的置信度),仍然满足 不了某些情况 下精确定位 的需 要。差 分 GP S定位技术可使 定位 精度达到 m 级甚 至 c 级 .凶此 得到了广 m 泛的应用。 目 前 , 伞 球 移 动 通 信 系 统 GS ( o a S se fr Mo i M Glb l y tm o bl e Co mmu iain ,也被称 为蜂窝 移动 无线 )的他用 已经得到 普 nc t s o 及 . GS 网络基木 覆盖全国。 S ( h r Me sg evc ) M MS S o t sa e S r ie 消息通讯利用 GS 网络,直接使用常 见的无线 GS 发送接 收设 M M 备就能实现 短消息 的传送 ,具有 实现 绚单 、通信 赞J 低、保密件能 I = l j 好 、 抗 干扰 能 力 强等 优 点 。 因此 在 差 分 定化 时 ,移 动 终端 和 控 制 中 心 之 间 可 以通 过 基 于 GS 无 线 公 用 网 的 S 式 进 行 数 掘 的 传 M MS 送 , 从 而 实现 差分 定位 。
开始 l { 始化 D I 2 S 0 8 B
仪器仪表用尸
初始化 DS1B2 8 0
发起 “ 温度 变拽 命夺
二二[= =
延时 1,等 待 s
发起 r d c t pd命令 e a ( n a s- ; ah
温度转 换完成
I_ | L 祭
— — — —
读取 第 1 宁节 、2 即 为温度敷据