ATmega48在环境监测中时钟自动校对的应用
AVR单片机ATMEGA48的C程序举例
AVR单片机ATMEGA48的EEPROM操作例子/***************************************************** CodeWizardAVR Panxiaoyi快速PWM,也可以叫单斜率PWM*****************************************************/#include <mega48.h>unsigned char eeprom i=0; //把变量放保存在EEPROM上/赋值与否并不影响i的值void main(void){TCCR0A=0b10000011; //比较匹配时OC0A=0,计数到比较值时OC0A=1,TOP固定等于255TCCR0B=0b00000001; //时钟=1分频DDRD.6=1; //PD6必须设置为输出时OC0A 输出的PWM才有效DDRD.2=0;PORTD.2=1; //PD2接按键输入/上拉电阻使能while(1){if(PIND.2==0) //如果按键按下/简单的按键防抖动{while(PIND.2==0); //等待按键松开i+=10; //更新EEPROM的数据i/重新来电后数据不变}OCR0A = i ; //刷新比较值,PWM占空比随之改变}}ATMEGA48的USART串口与PC通讯例子/***************************************************** CodeWizardAVRChip type : ATmega48VClock frequency : 7.372800 MHzMemory model : SmallExternal SRAM size : 0Data Stack size : 128波特率9600/8个数据位 /1个停止位 /无校验M8V20实验板硬件设置1: J5的2个跳线帽短接,使用外部晶振7.3728MHz2: J6与J7的4个跳线帽短接,使用MAX232,其他跳线开路3: DB9接口连接到电脑请配合串口调试软件SSCOM32或者comdebug进行调试*/#include <mega48.h>#include <stdio.h>#include <delay.h>void main(void){UCSR0B=0x18; //下面是3条语句是串口初始化语句UCSR0C=0x06;UBRR0L=0x2F;while(1) //循环{unsigned char data; //定义一个局部变量data=getchar(); //等待,直到接收到一个数据putchar(data); //将接收到的数据发送出去}} //endATMEGA48的T/C2与精确时钟例子/*****************************************************CodeWizardAVR V1.25.6 ProfessionalChip type : ATmega48Clock frequency : 7.372800 MHzMemory model : SmallExternal SRAM size : 0Data Stack size : 128计算: 1秒= 时钟/ ( 分频* 计数)假设时钟= 7372800 Hz 那么: 1秒= 7372800 / ( 分频* 计数)得: 计数=7372800/分频由于分频只有1/8/32/64/128/256/1024 供我们选择,而计数最高只有8位(255)为了不占用资源,中断次数尽量少一点比较好,并且中断时间越短越好所以我们可以选择计数= 时钟7372800 / 分频1024 / 30次中断= 240这个240就是T/C2的计数上限TOP*****************************************************/#include <mega48.h>unsigned char TC2A=0;interrupt [TIM2_COMPA] void timer2_compa_isr(void){TC2A++;if(TC2A>=30) TC2A=0;if(TC2A>25) PORTD.3=1; else PORTD.3=0;}void main(void){TCCR2A|=2; //工作于CTC模式(比较匹配时计算器清零)OCR2A=240; //设置TOP的值(计算器的上限值)TCCR2B|=7; //取系统时钟1024分频作为T/C2时钟TIMSK2=2; //使能计数器的值达到TOP 时产生中断DDRD.3=1; //使用PD3每秒驱动蜂鸣器"嘀"一次#asm("sei") //插入汇编语句,打开全局中断while (1){#asm("nop") //空操作的汇编代码,等待中断发生};}/****************************************************假设程序还有一个3位数码管动态扫描任务,这时我们就可以这样计算1:数码管的扫描频率在75-85Hz比较合适,太低会闪烁,太高占用资源2:每扫描一次就必须分3次显示,分别是个位/十位/百位3:这时我们可以计数出显示频率是225-255Hz(中断频率),在这里假设=240Hz 4:这时我们就可以顺便使用这个T/C2定数中断来保证扫描的可靠运行了5:计算: 计数= 时钟7372800 / 分频128 / 240次中断= 240 ***/ATMEGA48外部电平变化中断PCINT例子/***************************************************** CodeWizardAVRChip type : ATmega48VClock frequency : 1.000000 MHzMemory model : SmallExternal SRAM size : 0Data Stack size : 128外部PCINT0-PCINT7共享一个中断源PCINT0外部PCINT8-PCINT14共享一个中断源PCINT1外部PCINT16-PCINT23共享一个中断源PCINT2没有使用延时/通信语句,所以使用内部/外部时钟都可以每按动INT0按键一次,PD3的电平就翻转一次本例子没有考虑太多的按键防抖动功能*******************/#include <mega48.h>//外部PCINT16-PCINT23共享一个中断源PCINT2//请参考M48数据手册的48页/75页interrupt [PCINT2] void PCINT2_isr(void){PORTB.0=~PORTB.0; //电平取反PCIFR|=4; //清除PCINT2中断触发标记,防止按键抖动}void main(void){PORTD=255;DDRD=0; //设置PCINT16-PCINT23端口为输入,上拉电阻有效PORTB.0=0;DDRB.0 =1; //设置PB0输出低电平,准备驱动蜂鸣器PCICR|=4; //使能PCINT16-PCINT23外部电平变化中断PCMSK2|=4; //使能PCINT18有效#asm("sei") //插入汇编语句,打开全局中断while (1) //循环,等待中断{#asm("nop") //空操作的汇编代码,等待中断发生};}ATMEGA48外部中断INT0例子/***************************************************** CodeWizardAVRChip type : ATmega48VClock frequency : 1.000000 MHzMemory model : SmallExternal SRAM size : 0Data Stack size : 128INT0最好接一个4.7K的上拉电阻,按键对地有效没有使用延时/通信语句,所以使用内部/外部时钟都可以每按动INT0按键一次,PD3的电平就翻转一次本例子没有考虑太多的按键防抖动功能*******************/#include <mega48.h>interrupt [2] void INT0_isr(void) //INT0的中断向量是2,请参考M48数据手册的48页{PORTD.3=~PORTD.3; //电平取反EIFR|=1; //清除INT0中断触发标记,防止按键抖动}void main(void){PORTD.2=1;DDRD.2=0; //设置INT0端口为输入,上拉电阻有效PORTD.3=0;DDRD.3 =1; //设置PD3输出低电平,准备驱动蜂鸣器EIMSK|=1; //打开INT0中断EICRA|=3; //INT0上升沿触发#asm("sei") //插入汇编语句,打开全局中断while (1) //循环,等待中断{#asm("nop") //空操作的汇编代码,等待中断发生};}ATMEGA48的ADC模数转换例子////ADC结果由串口输出到电脑显示#include <mega48.h>#include <stdio.h>#include <delay.h>void main(void){//外部时钟 7.3728MHz (请取消时钟8分频)//串口初始化,波特率9600Hz,8个数据位,1个停止位,无奇偶校验,无中断使能UCSR0B=8;UCSR0C=6;UBRR0L=47;//**************************************************************** *ADMUX=96; //设置参考电压为AVCC,结构左对齐(就是8位精度)ADCSRA|=135; //使能ADC,ADC时钟=系统时钟128分频while (1){unsigned char adc;ADMUX=ADMUX&240|2; //清除已选择的ADC通道,选择新的ADC通道(0-7)ADCSRA|=64; //启动单次ADC转换while((ADCSRA&16)==0); //等待ADC转换结束adc=ADCH; //结果左对齐只需读取高8位数据ADCSRA|=16; //清除ADC转换结束标记putchar(adc/100+48); //从串口输出ADC的百位数putchar(adc/10%10+48); //从串口输出ADC的十位数putchar(adc%10+48); //从串口输出ADC的个位数delay_ms(500); //延时putchar(13); //回车putchar(10); //换行}}ATMEGA8/ATMEGA16多机通讯例子下面是一个M16的多机通讯例子,也适合M8,只需要修改头文件就可以了,本例子在3台机上测试并稳定通过主机代码/* AVR单片机DIY网潘小艺 CVAVR1.25.9通讯规则:01:时钟7.3728 MHz/波特率9600/9个数据位/奇校验/1个停止位/硬件多机通讯功能/02:通讯连接采用硬件MAX485,双向单工03:MAX485的RE/DE并联接到单片机的PD2脚(高电平发送/低电平接收)04:所有MAX485的A脚并联/B脚并联/D脚接TXD/R脚接RXD05:每个上行/下行的数据包的字节个数都是一样的(通讯数据量)06:数据包格式: 地址_数据1_数据2_数据3_数据n_CRC8校验码07:所有单元的数据接收都是采用中断+查询的方式08:总是由主机向从机下发一个数据包,从机收到数据包并校验正确后向主机回复一个数据包09:不管是主机还是从机,如果收到的数据包有任何错误,都将丢弃该数据包,等效于没有接收10:通讯采用主机轮询方式,从机之间不能相互通讯,必须通过主机才能交换数据11:无效地址是0,主机地址是1,从机地址是11.12.13...广播地址是255 */#include <mega16.h>#include <delay.h>#include <usart.h>#include <crc8.h>#define amount 10//设定通讯数据量#define address1//请在这里设定本机地址#define max485_out PORTD.2=1#define max485_in PORTD.2=0#define max485_RW_ok DDRD.2=1unsignedchar send[amount];//发件箱unsigned charinbox[amount];//收件箱unsigned charn=0;//记忆接收中断的次数unsigned char x=0;//******************************************************************* *******************void usart_out(unsigned char *datas,unsigned char n){unsigned char i=0;max485_out;//使MAX485处于发送状态while(i<n)//一共发送n个数据{if(i==0) UCSRB|=1; else UCSRB&=254;UDR=*(datas+i);//装载数据开始发送while((UCSRA&64)==0);//等待发送结束UCSRA|=64;//清除发送结束标志i++;//发送次数统计}max485_in;//使MAX485处于接收状态}//******************************************************************* *******************interrupt[12]Rxd_isr(void)//接收中断{if( UCSRA&28 ){ n=UDR; n=0; UCSRA|=0x01; } else //接收出错就重新打开地址帧筛选功能{if( UCSRB&2 )n=0;//检测到地址信息时计数清零inbox[n]=UDR; n++;//把接收到的数据保存到收件箱if( inbox[0]==address ) UCSRA&=254; else UCSRA|=0x01; //地址筛选}}//******************************************************************* *******************void main(void){usart_init();max485_in;max485_RW_ok;DDRA=7;//通讯状态指示#asm("sei");while(1){x=~x;//测试用的变量PORTA.0=~PORTA.0;//观察单片机是否死机(供电一定要好)//************************************与从机11对话****************************************if(x) send[3]=0; elsesend[3]=255; //更新发件箱的数据(测试代码)send[0]=11;//指向从机地址send[amount-1]=crc8(send,amount-1);//计算发件箱数据的crc8校验码usart_out(send,amount);//将发件箱的数据send[]发送出去;n=0;//计数复位,准备接收新数据 delay_ms(15);//等待从机回复数据,这个时间要计算好if(n==amount && inbox[amount-1]==crc8(inbox,amount-1)) //接收正确处理与测试{PORTA.1=1; delay_ms(10); PORTA.1=0;}else//接收错误处理与测试 {PORTA.2=1; delay_ms(10); PORTA.2=0;}//************************************与从机12对话****************************************if(x) send[3]=50; elsesend[3]=200; //更新发件箱的数据(测试代码)send[0]=12;//指向从机地址send[amount-1]=crc8(send,amount-1);//计算发件箱数据的crc8校验码usart_out(send,amount);//将发件箱的数据send[]发送出去;n=0;//计数复位,准备接收新数据 delay_ms(15);//等待从机回复数据,这个时间要计算好if(n==amount && inbox[amount-1]==crc8(inbox,amount-1)) //接收正确处理与测试{PORTA.1=1; delay_ms(10); PORTA.1=0;}else//接收错误处理与测试 {PORTA.2=1; delay_ms(10); PORTA.2=0;}}} //end从机(需要增加多个从机时可以修改从机的地址就可以了)//从机11#include <mega16.h>#include <usart.h>#include <crc8.h>#define amount 10//设定通讯数据量#define address11//请在这里设定本机地址#define max485_out PORTD.2=1#define max485_in PORTD.2=0#define max485_RW_ok DDRD.2=1unsignedchar send[amount];//发件箱unsigned charinbox[amount];//收件箱unsigned charn=0;//记忆中断次数//******************************************************************* *******************void usart_out(unsigned char *datas,unsigned char n){unsigned char i=0;max485_out;//使MAX485处于发送状态while(i<n)//一共发送n个数据{if(i==0) UCSRB|=1; else UCSRB&=254;UDR=*(datas+i);//装载数据开始发送while((UCSRA&64)==0);//等待发送结束UCSRA|=64;//清除发送结束标志i++;//发送次数统计}max485_in;//使MAX485处于接收状态}//******************************************************************* *******************interrupt[12]Rxd_isr(void)//接收中断{if( UCSRA&28 ){ n=UDR; n=0; UCSRA|=0x01; } else //接收出错就重新打开地址帧筛选功能{if( UCSRB&2 )n=0;//检测到地址信息时计数清零inbox[n]=UDR; n++;//把接收到的数据保存到收件箱if( inbox[0]==address ) UCSRA&=254; else UCSRA|=0x01; //地址筛选if( n==amount )//如果接收到完整的数据包{if( inbox[amount-1]==crc8(inbox,amount-1) )//如果crc8校验正确就...{send[0]=1;//发件箱地址指向主机//send[1]=?//请更新发件箱的数据//send[n]=?send[amount-1]=crc8(send,amount-1);//产生发件箱的crc8校验码usart_out(send,amount);//发送发件箱的数据包/查询方式比较耗时OCR1A=inbox[3];//收件箱测试(控制T/C1的PWM驱动LED)}}}}//******************************************************************* *******************void main(void){usart_init();max485_in;max485_RW_ok;TCCR1A =0B10000001;//OCR1A/PD5/8位快速PWMTCCR1B =0B00001001;//时钟1分频DDRD |=0b00100000;//输出使能OCR1A =255;//初始化PWM输出100%占空比#asm("sei")while (1){};}USART.h文件内容//波特率9600/9个数据位/1个停止位/奇校验/收发开启/接收中断/地址过滤void usart_init(void){UCSRA=0x01;UCSRB=0x9C;UCSRC=0xB6;UBRRH=0x00;UBRRL=47;}CRC8.h文件内容unsigned char crc8(unsigned char *ptr, unsigned char len){unsigned char i;unsigned char crc=0;while(len--!=0){for(i=1; i!=0; i*=2){if((crc&1)!=0) {crc/=2; crc^=0x8C;}else crc/=2;if((*ptr&i)!=0) crc^=0x8C;}ptr++;}return(crc);}ATMEGA48多机通讯例子主机程序********************************************************************* ********************************/* AVR单片机DIY网潘小艺 CVAVR1.24.8d通讯规则:1:时钟7.3728 MHz/波特率9600/9个数据位/奇校验/1个停止位/硬件多机通讯功能/2:通讯连接采用硬件MAX485,双向单工3:每个上行/下行的数据包的字节个数都是一样的(通讯数据量)4:每个上行/下行的数据包都采用CRC8校验5:数据接收采用中断+查询的方式6:总是由主机向从机发送一个数据包,从机收到数据包后向主机回复一个数据包7:不管是主机还是从机,如果收到的数据包有任何错误,都将丢弃该数据包,等效于没有接收8:从机之间不能相互通讯,必须通过主机才能交换数据9:无效地址是0,主机地址是1,从机地址是2.3.4......广播地址是255*/#include <mega48.h>#include <delay.h>#define amount 10 //设定通讯数据量(包括1个地址帧,n个数据帧,1个校验帧)#include <usart.h>#include <1wire.h> //CRC校验函数就在这个文件里面unsigned char send[amount]; //发件箱unsigned char inbox[amount]; //收件箱unsigned char n=0; //记忆中断次数//--------------------------------------------------------------------interrupt[19] Rxd_isr(void) //接收中断{unsigned char ERROR=0;if( UCSR0A&4 || UCSR0A&16 ) ERROR=1; //奇偶效验错误或者帧错误就记录下来inbox[n]=UDR0; //保存到收件箱n++;//记忆中断次数if(ERROR) inbox[0]=0; //如果通讯有错,收件箱的地址帧就标记成无效地址0}//---------------------------------------------------------------------void main(void){USARTinit(); //串口初始化UCSR0A=0; //主机关闭地址筛选功能(多机通讯功能)#asm("sei") //打开全局中断while(1){//-------------与从机2对话,与其他从机对话与下面的程序类似-------------------n=0;//中断次数清0inbox[0]=0; //收件箱地址清0send[0]=2; //改变这个地址就可以实现与某个从机对话send[amount-1]=w1_dow_crc8(send,amount-1); //计算发件箱的crc8校验码TXD(send); //将发件箱的数据send[]发送出去;//等待,从机接收到数据后会回复数据的,如果是10个字节数据量,不能少于13ms//这个时间由人工计算,要考虑从机由于各种中断延长回复时间的可能 delay_ms(30);//如果收件箱已经收到amount个数据,并且crc8校验成功就...if(n==amount && inbox[amount-1]==w1_dow_crc8(inbox,amount-1)) {if(inbox[0]==1) //如果收件箱地址帧属于本机就运行下面的测试代码{DDRD.3=1;PORTD.3=1; delay_ms(50);PORTD.3=0; delay_ms(950);}if(inbox[0]==255){//请在这里添加收到广播数据的处理程序}}}} //end//******************************************************************* *******************************从机程序//******************************************************************* *******************************#include <mega48.h>#include <delay.h>#define amount 10 //设定通讯数据量(包括1个地址帧,n个数据帧,1个校验帧)#include <usart.h>#include <1wire.h>#define address 2 //请在这里设定本机地址unsigned char send[amount]; //发件箱unsigned char inbox[amount]; //收件箱unsigned char n=0; //记忆中断次数//--------------------------------------------------------------------interrupt[19] Rxd_isr(void) //接收中断{unsigned char ERROR=0;if( UCSR0A&4 || UCSR0A&16 ) ERROR=1; //记录奇偶效验错误或者帧错误inbox[n]=UDR0;//把接收到的数据保存到收件箱n++;//记忆接收的次数if(ERROR)//如果通讯有错....{n=0;//接收计数清0inbox[0]=0;//把地址改为无效地址0UCSR0A|=0x01;//重新打开接收器的地址帧筛选功能}//如果地址匹配本机或者是广播地址就关闭地址筛选(多机通讯)功能if(inbox[0]==address ||inbox[0]==255) UCSR0A&=254;if(n==amount)//接收到amount个数据以后...{n=0;//接收计数清0UCSR0A|=0x01;//重新打开接收器的地址帧筛选功能if(inbox[amount-1]==w1_dow_crc8(inbox,amount-1)) //如果crc8校验正确就...{if(inbox[0]==address) //如果地址匹配本机就回复数据{send[0]=1;//发件箱地址指向主机send[amount-1]=w1_dow_crc8(send,amount-1); //产生发件箱的crc8校验码TXD(send);//发送发件箱的数据包send[]//请在这里备份你的收件箱信息}if(inbox[0]==255) //如果是广播地址就...{//请在这里添加你的代码//收到广播数据请不要回复}}}}//---------------------------------------------------------------------void main(void){USARTinit();//串口初始化UCSR0A=0x01;//从机打开地址帧筛选功能(多机通讯模式)#asm("sei")//打开全局中断while(1){//请在这里添加你的代码}} //end//******************************************************************* **************************<usart.h> 头文件//******************************************************************* **************************//波特率9600/9个数据位/1个停止位/奇校验/收发开启/接收中断void USARTinit(void){UCSR0B=0x9C;UCSR0C=0x36;UBRR0L=0x2F;PORTD.4=0; //M AX485平时工作在接收状态DDRD.4=1;}//-----------------------------------------------------------//从数组datas[]的首地址开始发送amount个数据,其中第0个数据是地址帧,其他是数据帧void TXD(unsigned char *datas){unsigned char i=0;PORTD.4=1; //使MAX485处于发送状态while(i<amount) //一共发送amount个数据{if(i==0) UCSR0B|=1; else UCSR0B&=254;UDR0=*(datas+i); //装载数据开始发送while((UCSR0A&64)==0); //等待发送结束UCSR0A|=64; //清除发送结束标志i++;//发送次数统计}PORTD.4=0; //使MAX485处于接收状态}//******************************************************************* **************************ATMEGA48中T/C0的相位修正PWM与快速PWM例子/***************************************************** CodeWizardAVR V1.25.3 Professional相位修正PWM,也可以叫双斜率PWM*****************************************************/#include <mega48.h>void main(void){TCCR0A=0b10000001; //升序比较匹配时OC0A=0,降序时比较匹配时置OC0A=1,TOP固定等于255TCCR0B=0b00000101; //时钟=1024分频,一旦设定时钟,TCNT0就开始不断的计数OCR0A =123; //比较设定值,数字越大,PD6输出1的占空比越大DDRD.6=1; //端口方向设置为输出才有效while (1);}/***************************************************** CodeWizardAVR V1.25.3 Professional快速PWM,也可以叫单斜率PWM*****************************************************/#include <mega48.h>void main(void){TCCR0A=0b10000011; //比较匹配时OC0A=0,计数到比较值时OC0A=1,TOP 固定等于255TCCR0B=0b00000101; //时钟=1024分频OCR0A =123; //比较设定值,数字越大,PD6输出1的占空比越大DDRD.6=1; //端口方向设置为输出才有效while (1);}名词解释:TOP计数器(TCNT0)由0开始不断的作+1计数,计数到最大值时,计数器又返回到0开始作+1计数(单斜率),如此循环;计数器(TCNT0)由0开始不断的作+1计数,计数到最大值时就开始作-1计数,计数到0时又开始不断的作+1计数(双斜率),如此循环;这个最大值就是TOP(TOP可以为固定值255,也可以是OCR0A的值)由于 TCNT0 是一个计数器,一旦时钟设定,它就会不断的计数(倒数),这样TCNT0 和OCR0A(OCR0B)就会有相等的时候,相等时就是比较匹配。
基于Atmega48太阳能充电控制器的设计

原料 的前提下更好地应用于工业生产 中。 参考文献 :
放 电条件予 以限制 。
1脉 冲宽 度调 制( P WM)
脉冲宽度调 制 ( P wM)模式是指在一个 固定的时钟频 率 下, 通过 At me g a 4 8微处理器的数字输出来控制开关 的关断时 间, 从而达到控制信号 的占空 比, 以控制输 出电压 的大小 。实 际上就是用一定频率开关来控 制直流电压 的输 出。 利用P WM 脉 宽调制方法对蓄 电池进行充 电, 就是先对 电池充 电一会儿,
摘要 : 采 用先进 的 P wM( P u l s e Wi d t h Mo d u l a t i o n ) 脉 宽调 制 的 方法 来给 蓄 电池 充 电' 硬件 主要 通过 At me g a 4 8 微 控 制 器的 P W M 口。 利 用软 件 编程 的 方 法 来 实现 对 占空 比 大小 的 控制 , 从 而 达到 控 制 蓄 电 池 充 电 电压 的 目的 。对 于 蓄 电池 的 电压 采 用 时
以生产中对位等 , 也就 是整 张 I T O玻璃并不是都能用上 。 若① L C D 的外形为玻璃长 L = 6 6 mm, 大玻璃 宽 3 0 mm,小玻璃 宽 W1 = 2 6 mm, 台阶 宽 Wp = 4 mm。②选 用 I T O玻璃 3 0 0 mmx
3 6 0 mr n x 1 . 1 mm。③ 标 盒 四周 留 7 . 5 mm 的 边 用 于 生产 中对 位
2 0 1 3 年 第 3 期 ( 总第 1 2 5期 )
信 息 通 信
I NF 0RM AT 1 0N & COM MUNI C AT I ONS
201 3
( S u m .N o 1 2 5 )
AVRISP MKII使用说明
AVRISP MKII编程器使用说明谢谢您使用A VRISPMKII下载器如有问题,可与我处技术支持部门联系A VR单片机开发工具网友情赞助,提供测试所需的各种开发平台,再这里向A VR单片机学习网的朋友致以诚挚的谢意。
网址:/总体介绍产品简介A VRISP MKII 下载器是ATMEL 公司开发的A VRISP 第二代产品,USB接口。
A VRISP MKII 支持全系列A VR + 部分其他芯片(如S51等)。
USB接口,便于使用与携带,特别适用于没有串口的台式电脑和笔记本电脑。
A VRISP MKII是一种结构紧密而且容易使用的在线编程工具,它为ATMEL 系列A VR 单片机开发应用程序设计。
由于其尺寸小,它也成为一种为现有的利用A VR单片机的应用程序局升级的极好的工具。
A VRISP MKII是由USB供电,因而A VR ISP 编程器无需额外能源供应。
A VRISP MKII编程接口是集成于A VR Studio中的。
Flash,EEPROM和所有的Fuse和Lock bit可编程ISP选项,可以选择单个分别编程或者连续自动编程。
我公司生产的A VRISP MKII在线编程器和atmel官方的A VRISP MKII在线编程器功能上完全兼容,但价格更低,是工厂,学校,个人等开发A VR单片机的首选工具。
产品特点A VR Studio4.1x 接口支持所有A VR芯片的ISP编程可以对Flash和EEPROM进行编程支持熔丝位和锁定位的编程支持RC振荡器校准可以工作在2.7伏到5.5伏电压之间速度可调,支持50Hz~4MHz的isp时钟频率使用USB高达4MHz的全速通讯,兼容USB2.0可直接利用USB供电而不需要额外供电A VR Studio完全支持A VRISPMKII,我们推荐使用最新的A VR Studio 4.X。
支持芯片型号AT90PWM1、AT90PWM2、AT90PWM216、AT90PWM2B、AT90PWM3、AT90PWM316、AT90PWM3B。
基于ATmega48的温度测控系统

图 2 硬 件 电 路 图
3 系统 软 件 方 案 设 计
系统 软 件 设 计 包 括 单 片 机 硬 件 采 集 程 序 和 上 位 机监 控 程 序
两部分 。 3 . 1 单 片机 控 制 程 序 设 计 下 位 机 程 序 用 C 语 言 编 程 实 现 。该 部 分 包 括 硬 件 初 始 化 , 数据 采集 , 接收发送等部分 。 数 据采 集 由 A t me g a 自带 AD转 换 器、 定时计数器 完成 , 把结果存在相 应寄存器 中, 数 值 经 过 简 单 滤 波 处 理 后 发 送 给 上 位 机 。AD转 换 公 式 为 :
,
l o we r c om pu t er . Co mmu ni ca t i on be t we en t h e co m pu t er an d l o we r c or gp ut er i s ba s e d on RS23 2 s er i al c om mun i c at i on Ke y wo r d s: At me ga 48, RS-2 32, co mmu n i c at i on, di es e l e ngi ne e xp er i me n t
千 次 并在 低 温 状 态保 持 4 0 s的 实 验 , 显 然 用 原 系统 手 动 切 换 将 大
大 增 加 操 作 人 员 的负 担 , 增 大 人 工 干 预 的误 差 因 素 , 延 长 实 验 周 期。 本 系统 应 循 环 试 验 而设 计 。 用原有 P I D 控制 器 保 持低 温 4 0 s , 升 温 过 程 由单 片 机 系 统控 制 , 实 现 两 个 控制 器 的 自动切 换 。
ATmega48中文数据手册
•高性能、低功耗的8位AVR® 微处理器•先进的RISC结构–131条指令 – 大多数指令的执行时间为单个时钟周期–32 x 8 通用工作寄存器–全静态操作–工作于20 MHz时性能高达20 MIPS–只需两个时钟周期的硬件乘法器•非易失性的程序和数据存储器–4/8/16K字节的系统内可编程Flash (ATmega48/88/168)擦写寿命: 10,000次–具有独立锁定位的可选Boot代码区通过片上Boot程序实现系统内编程真正的同时读写操作–256/512/512字节的EEPROM (ATmega48/88/168)擦写寿命: 100,000次–512/1K/1K字节的片内SRAM (ATmega48/88/168)控制器–可以对锁定位进行编程以实现用户程序的加密•外设特点–两个具有独立预分频器和比较器功能的8位定时器/计数器–一个具有预分频器、比较功能和捕捉功能的16位定时器/计数器–具有独立振荡器的实时计数器RTC–六通道PWM–8路10位ADC(TQFP与MLF封装)–6路10位ADC( PDIP封装)–可编程的串行USART接口–可工作于主机/从机模式的SPI串行接口–面向字节的两线串行接口–具有独立片内振荡器的可编程看门狗定时器–片内模拟比较器–引脚电平变化可引发中断及唤醒MCU•特殊的微控制器特点–上电复位以及可编程的掉电检测–经过标定的片内振荡器–片内/外中断源–五种休眠模式:空闲模式、ADC噪声抑制模式、省电模式、掉电模式和Standby模式•I/O口与封装–23个可编程的I/O口线–28引脚PDIP, 32引脚TQFP与32引脚MLF封装•工作电压:–ATmega48V/88V/168V:1.8 - 5.5V–ATmega48/88/168:2.7 - 5.5V•工作温度范围:–-40°C至85°C•工作速度等级:–ATmega48V/88V/168V:************.5V,*************.5V–ATmega48/88/168:*************.5V,*************.5V•极低功耗–正常模式:1 MHz, 1.8V: 240µA32 kHz, 1.8V: 15µA (包括振荡器)–掉电模式:1.8V,0.1µAFigure 1. ATmega48/88/168引脚排列声明本数据手册的典型值来源于对器件的仿真,以及其他基于相同产生工艺的 AVR 微控制器的标定特性。
ATmega48在火灾探测器中的应用

以 A m g4 芯片为开发平 台, T ea8 具体谈谈如何 开发 出性 价比高的火 灾报警探测器 。
火器 灾联 报动 控 制 警
图 1 火 灾 自动报蕾 系统构成
口
2 火灾 自动报警 系统 的基本构成
火灾报警系统一般 由火灾报警控制器 以及并接 于 控制器两总线 ( +和 S s 一)上的探测器 以及报警按钮等
[ 中图分类 号 】P 7 [ T 2 3 文献标识码 】 [ B 文章编号 】0 038 (0 6 0 ,0 00 10 .8 6 2 0 )30 5 .3
1 引 言
目前 国内的火灾 报警探测器 已大部分实现 了智能 化, 每个探测器内部都 有一 个微处理器 ( )该微处理 , 器 承担起解码 、 数据采集 、 火灾判断 、 返回数据等功能 , 因此( ) 的性能对于探测器来讲 是至关重 要的。本文
存字 E O; 字 LH A 节ERM P 节
11 RS 3 条 IC指令 , 流水线结构 。 时钟周 期 , 单 硬件乘 法指令
3 A me a 8芯片 的特点 T g4
A mg T ea系列 P是 A M L公 司的基于 A R R S TE V IC结 构的高
裹 1 A mea 8芯 片主要技术指标 T g4
项 目 指 标
部件组成 , 制器对探测器等部件进行巡检 , 控 检查各部件 的工作状 况 ,当探测器感知到有报警信号时,则探测器通过电流信号返回报 警信号, 控制器收到报警信号后进行声光报警 , 同时启动相关的联
动设备 。连接框 图见图 1 。
码成功后 以及发现巡检地址 同 自身存储 的地址 相匹配 时 , 通过 0 .
高 级 语 言 支 持 I gC ft 司 的 C语 言 mae r 公
基于ATMEGA48的线阵CCD数据采集系统

AD 2 0的采 样 速 度 可 达 1MH ,它 92 0 z 在 采 样 时钟 的上 升 沿 采 样 信 号 ,然 后 经 过 3个时钟 周期输 出数字信 号 。 AD 2 0的采 样 时 钟 C K可 由 M 经 92 L 4分 频 后 获 得 。 3 IO 存 储 、FF FF 存 储 器 芯 片采 用 I 7 0 , IO DT 2 4 字 长 为 9位 , 容量 为 4 9 个 存 储 字 其 06 节 。 IO 存 储 器 的特 点在 于它 有 两 个 FF 端 口:输 入 口和 输 出 口 ,并 按 先 进 先 出 的顺 序 来 存 放 数 据 ,无 需 地 址 发 生
www.e o wod m ∞ s ns r dm
. ◆ ∞ 、 .■ ∞ , r
与 系 统
数 据 的 大 小 来 查表 以获 得 代 表 积 分 时 间 的数 据 ,然 后 将 查 表 所 得 的数 据 写入 t r 相 关 的 寄存 器 从 而 改 变 I G 的周 期 , i l me C
A ME A4 是 A ME T G 8 T L公司生产 的精 简指令 集【单片机 ,工作时可采用 内部时钟 ,并且 4 ] 内部定时器在一定的设置下可在引脚上可产 生 P WM 波形输 出。系统 的基本原理框 图如
图 1 示。 所
1 驱 动 脉 冲 的生 成 以及 积 分 时 间 的 设 定 、 T D10 DG 是 一 款 高 灵 敏 度 、 低 暗 电 C 34
生 C D所需要的驱动脉冲以及控制数据的采集等 。使用先进先出存储器 IT 24 O D 70 解决了高速的 A D转 /
换和慢 速的数据读取 之间的矛盾 。电路简 单,易于 实现 。 关键词 :A M G 4 ;先进 先出存储器 ;线阵 CO T E A8 D;
ATmega48中文数据手册
•高性能、低功耗的8位AVR® 微处理器•先进的RISC结构–131条指令 – 大多数指令的执行时间为单个时钟周期–32 x 8 通用工作寄存器–全静态操作–工作于20 MHz时性能高达20 MIPS–只需两个时钟周期的硬件乘法器•非易失性的程序和数据存储器–4/8/16K字节的系统内可编程Flash (ATmega48/88/168)擦写寿命: 10,000次–具有独立锁定位的可选Boot代码区通过片上Boot程序实现系统内编程真正的同时读写操作–256/512/512字节的EEPROM (ATmega48/88/168)擦写寿命: 100,000次–512/1K/1K字节的片内SRAM (ATmega48/88/168)控制器–可以对锁定位进行编程以实现用户程序的加密•外设特点–两个具有独立预分频器和比较器功能的8位定时器/计数器–一个具有预分频器、比较功能和捕捉功能的16位定时器/计数器–具有独立振荡器的实时计数器RTC–六通道PWM–8路10位ADC(TQFP与MLF封装)–6路10位ADC( PDIP封装)–可编程的串行USART接口–可工作于主机/从机模式的SPI串行接口–面向字节的两线串行接口–具有独立片内振荡器的可编程看门狗定时器–片内模拟比较器–引脚电平变化可引发中断及唤醒MCU•特殊的微控制器特点–上电复位以及可编程的掉电检测–经过标定的片内振荡器–片内/外中断源–五种休眠模式:空闲模式、ADC噪声抑制模式、省电模式、掉电模式和Standby模式•I/O口与封装–23个可编程的I/O口线–28引脚PDIP, 32引脚TQFP与32引脚MLF封装•工作电压:–ATmega48V/88V/168V:1.8 - 5.5V–ATmega48/88/168:2.7 - 5.5V•工作温度范围:–-40°C至85°C•工作速度等级:–ATmega48V/88V/168V:************.5V,*************.5V–ATmega48/88/168:*************.5V,*************.5V•极低功耗–正常模式:1 MHz, 1.8V: 240µA32 kHz, 1.8V: 15µA (包括振荡器)–掉电模式:1.8V,0.1µAFigure 1. ATmega48/88/168引脚排列声明本数据手册的典型值来源于对器件的仿真,以及其他基于相同产生工艺的 AVR 微控制器的标定特性。
atmega8原理及应用手册
atmega8原理及应用手册摘要:I.简介- ATmega8单片机的背景和特点II.原理- ATmega8单片机的基本结构和工作原理- ATmega8单片机的核心组件和功能III.应用领域- ATmega8单片机在嵌入式系统和自动化领域的应用- ATmega8单片机在消费电子和通信领域的应用IV.开发工具与技术- AVR Studio开发环境- GCC编译器- ATmega8单片机的编程与调试技巧V.结论- ATmega8单片机的发展趋势和市场前景正文:I.简介ATmega8单片机是Atmel公司于2002年推出的一款高性能AVR单片机。
其内部集成了大容量的存储器和丰富的硬件接口电路,具有AVR高档单片机Mege系列的全部性能和特点。
ATmega8采用了小引脚封装,价格低廉,且系统内可编程,因此被广泛应用于各种嵌入式系统和自动化领域。
II.原理ATmega8单片机的基本结构包括:AVR核、指令缓存、程序计数器、数据缓存、内存空间、外围设备接口等。
AVR核是单片机的核心,负责执行指令和处理数据。
指令缓存用于暂存从内存中读取的指令,程序计数器用于存储下一条要执行的指令地址。
数据缓存则用于存储处理过程中的数据。
内存空间包括数据存储器和程序存储器,用于存储程序和数据。
外围设备接口用于与外部设备进行通信。
ATmega8单片机的核心组件包括:定时器/计数器、中断控制器、串行通信接口、定时器/中断控制器、看门狗定时器等。
定时器/计数器用于计时和计数,中断控制器用于处理外部中断信号,串行通信接口用于实现串行通信,定时器/中断控制器用于定时中断处理,看门狗定时器用于检测系统是否异常。
III.应用领域ATmega8单片机广泛应用于嵌入式系统和自动化领域,如工业控制、智能家居、医疗设备等。
在消费电子和通信领域,ATmega8单片机也得到了广泛的应用,如智能手机、平板电脑、通信基站等。
IV.开发工具与技术ATmega8单片机的开发工具包括AVR Studio开发环境、GCC编译器等。
新版核磁共振分析应用软件用户手册——Ver 1.0

纽迈电子科技有限公司
பைடு நூலகம்
核磁共振分析应用软件 Ver 1.0
目录
目录................................................................................................................................ 1 第一章 分析软件概述.................................................................................................. 5 一、软件功能概述................................................................................................ 5 二、软件版本声明................................................................................................ 5 三、软件应用........................................................................................................ 5 1、范例一:如何自动匀场.......................................................................... 5 2、范例二:如何寻找中心频率.................................................................. 8 3、范例三:如何确定的硬脉冲脉宽........................................................ 10 4、范例四:如何设置 RG1、DRG1 和 PRG ........................................... 12 5、范例五:确定样品后,如何设置 TW ................................................ 14 6、范例六:硫酸铜水溶液的 T2 时间 ..................................................... 15 第二章 分析软件介绍................................................................................................ 19 一、软件的结构.................................................................................................. 19 二、实验步骤...................................................................................................... 19 三、登陆界面...................................................................................................... 20 四、主界面.......................................................................................................... 20 五、参数设置界面.............................................................................................. 24 1、工具栏.................................................................................................... 24 2、参数面板................................................................................................ 27 3、显示区.................................................................................................... 28 六、设置计划任务界面...................................................................................... 30 1、参数含义................................................................................................ 30 2、实验步骤................................................................................................ 31 七、用户管理界面.............................................................................................. 33 1、参数含义................................................................................................ 34 2、超级用户................................................................................................ 35 3、普通用户................................................................................................ 35 八、设备参数界面.............................................................................................. 35 九、采样数据界面.............................................................................................. 36 1、查询........................................................................................................ 38 2、输出........................................................................................................ 39
毕业设计(论文)基于atmega8单片机的gps定位系统设计

基于ATMEGA8单片机的GPS定位系统设计摘要本文主要是研究利用ATMEGA8单片机提取GPS卫星接收芯片(SDC Inc)接收到的数据,然后再把数据用软件滤波,并在LCD上显示经纬度等信息,以实现系统的功能。
由于GPS定位数据中存在着影响定位精度的随机误差,文中对接收机的位置误差建立了线性卡尔曼滤波模型,并利用观测数据对GPS定位数据的自适应卡尔曼滤波算法进行了仿真,结果表明滤波后定位精度得到了提高。
关键词: GPS, AVR单片机,卡尔曼滤波AbstractThis article is extracted using ATMEGA8 SCM GPS satellite receiver chip (SDC Inc) to receive the data, and then the data filtering software and LCD display latitude and longitude and other information in order to achieve the function of the system. As GPS positioning data in a positioning accuracy of the impact of random error, the text of the receiver's position error to establish a linear model Kalman filtering and use of data on the GPS positioning data adaptive Kalman filter the simulation results After that filter positioning accuracy has been enhanced.Key words:GPS, AVR microcontroller, Kalman filter目录1 绪论 (1)1.1课题的提出目的及意义 (1)1.2国内外研究与应用现状 (2)1.3论文构成及研究内容 (4)2 GPS工作原理及组成 (4)2.1GPS工作原理 (4)2.2GPS系统的组成 (7)2.3GPS接收机 (9)2.4GPS信号结构与数据采集 (9)3 硬件电路设计与实现 (12)3.1系统硬件框图 (12)3.2硬件电路的组成 (12)3.2.1 GPS接口电路 (12)3.2.2 复位电路设计 (13)3.2.3 串口电路 (14)3.2.4 LCD液晶显示电路 (15)4系统软件设计与实现 (18)4.1系统软件设计概述 (18)4.2GPS数据采集与处理的实现 (20)4.2.1GPS数据格式 (20)4.2.2系统串口设计 (20)4.3滤波算法的实现 (21)4.4LCD显示任务 (23)5系统实验测试及定位精度分析 (24)5.1实验方案 (24)5.2实验结果分析与讨论 (24)结论 (25)参考文献 (26)致谢 (29)附录 (30)1 绪论1.1课题的提出目的及意义随着国民经济的迅猛发展及社会信息化的空前提高,因为GPS技术和全天候、高精度和自动测量功能先进的测量工具和新的生产力,已经集成到国家经济建设、国防建设和社会发展的各种应用程序。
基于ATmega48 的电厂巡检指纹考勤系统设计

Science and Technology &Innovation ┃科技与创新2019年第17期·123·文章编号:2095-6835(2019)17-0123-02基于ATmega48的电厂巡检指纹考勤系统设计杜艳红,李刚(天津农学院工程技术学院,天津300384)摘要:为了保证电厂电能生产、输送、分配的连续性以及设备运行可靠稳定,必须安排巡检员定时或不定时进行巡视与检查,而较为枯燥的巡检工作容易让巡检工人厌倦和麻痹大意。
为了避免电厂巡检人员出现少巡、漏巡的情况,激发巡检人员的工作自觉性和主动性,设计了一款指纹考勤系统。
系统以ATmga48单片机为核心,应用AS-608指纹识别模块、240×320液晶模块、报警电路等,实现了指纹的识别、人员匹配与信息显示。
系统配合计算机可调取考勤记录,使巡检实现智能化、高效化、便捷化。
系统测试结果表明,单片机指纹考勤系统抗干扰能力强、成本低、操作简单、工作性能良好。
关键词:电厂巡检;考勤系统;单片机;指纹识别中图分类号:TP391.41文献标识码:ADOI :10.15913/ki.kjycx.2019.17.057电力作为日常生活中重要的组成部分,发挥着重要的作用。
在电厂中,发电和输送电能设备的日常巡检和运行维护是保证电网稳定和可靠的基础,则预测性的巡检和维护就显得尤为必要。
目前,中国多数电厂巡检仍然是依靠人工巡检,但是当下的人工巡检存在很多问题,例如效率低下,易出现漏巡、代巡,不按规定巡检等问题。
目前,指纹识别技术最主要的应用领域是考勤和门禁系统,且在信息安全领域的应用也较为广泛,最常见的有手机指纹识别等。
因为指纹的采集、处理、识别、比对等技术已相当完善,所以,现阶段更多地将指纹识别技术用于考勤的身份认证环节。
1系统结构本系统主要以ATmega48单片机为系统核心控制器,外围扩展指纹识别模块、实时时钟模块、外置Flash 存储器、液晶屏和报警电路等,结构如图1所示。
基于ATmega8的多功能定时器设计
基于ATmega8的多功能定时器设计吴新杰;吕殿基【摘要】目前钟表和定时器的输入多采用五个按键,显示采用字段方式,操作繁琐,人机界面不友好.本文提出一种采用4×4键盘输入,128×64点阵液晶显示的多功能定时器,具有人机界面友好、使用方便灵活、便于功能拓展的优点.文中给出了系统设计方案和主要设计思路,经验证,这种设计确实可行.%At present,the clock and the timer input uses five keys,the display uses the seven segment digital tube,the operation is tedious,the man-machine interface is not friendly.This paper presents a multi function timer with 4×4 keyboard input,128×64 dot matrix LCD display.It has the advantages of friendly man-machine interface,convenient and flexible use, and easy to expand.The system design scheme and main design ideas are given in this paper.【期刊名称】《电子测试》【年(卷),期】2016(000)021【总页数】2页(P20-21)【关键词】ATmega8;单片机;定时器;相对定时;绝对定时【作者】吴新杰;吕殿基【作者单位】北京经济管理职业学院,北京,100102;北京经济管理职业学院,北京,100102【正文语种】中文钟表和定时器应用极为广泛,通常采用上下键、左右键和确认键五个按键作为输入,在调整时间时,需要反复按键选择功能,然后再逐一改变数值,操作繁琐。
TWO mega48实验板介绍

TWO MEGA48 开发实验板ATmega48 属于美国ATMEL公司AVR 高档单片机成员之一,它具有AVR 高档单片机的性能,且具有低档单片机的价格,深受广大单片机用户的喜爱尤其AVR 单片机不需购买昂贵的仿真器编程器也可搞单片机的开发应用,这对单片机初学者尤为重要。
本产品适合初学者和开发者使用。
初学者无需任何辅助器件可在实验板上实践AVR单片机的所有功能(下有所有功能的列表);开发者也无需任何辅助器件可在实验板上开发出常用系统程序;也可外接功能器件,开发出相应系统程序。
本实验板的主要特点:1.采用两片单片机,实现AVR强大的通信功能。
2.外扩展口可兼容多数器件的实验,例如AT24C02、DA TLC5620等。
3.功能完善,AVR的功能都可进行实验。
4.下载口采用USB接口,方便个人作移动实验。
5.输入电源电压宽7—12V。
6.所有功能模块均独立,可灵活使用。
TWO MEGA48 开发实验器实验清单1.I/O 普通I/O 口输入/输出实验,均有发光二极管显示;I/O 口均可外引。
2.中断两个外部中断可通过短路环选择。
3.ADC 模数转换AD 实验。
4.LED LED 流动实验。
5. PWM 2 路PWM 输出接口,电路通过跳线可做全部PWM 实验。
6.DAC 数模转换DA 实验(PWM实现D/A)。
7.MUSIC 电子合成音乐实验。
8.NUMLED 数码LED 实验(有4 位LED 数码管)。
9.4×4键盘键盘接口实验。
10.UART RS232(模拟)通信实验(上机和两片m48之间)。
11.I2C I2C总线实验使用两片MEGA48 的硬件TWI(I2C)之间通信。
12.LCD OCMJ4X8 汉字LCD 液晶显示器,自带GB2312 16X16 点阵国标一级简体汉字和ASCII8X8(16X16)英文字库,用户输入区位码ASCII码即可实现文本显示(OCMJ4X8 汉字LCD 液晶显示器另文详解)。
基于ATmega48单片机的电动自行车控制器的设计的开题报告
基于ATmega48单片机的电动自行车控制器的设计的开题报告一、课题背景电动自行车作为城市出行的一种常见交通工具,具有节能环保、使用简便、成本低等优点。
而电动自行车控制器则是控制电动自行车电机运转的重要部件。
电动自行车控制器通常包括几个功能模块,例如功率放大模块、速度控制模块、电池状态检测模块等。
目前,市面上的电动自行车控制器大多采用简单的模拟控制方式,样式较为单一,而且稳定性和安全性有待提高。
基于此,本项目拟设计一种基于ATmega48单片机的电动自行车控制器。
该控制器将采用数字信号处理技术,通过对电机驱动板进行控制,实现对电动自行车速度、加速、减速、制动等方面的精细控制。
二、课题研究目的本项目旨在设计一种稳定、可靠、安全的电动自行车控制器,主要包括以下三个方面的研究目的:1. 实现对电动自行车速度、加速、减速、制动等方面的精细控制。
利用数字信号处理技术对电机的运转进行控制,保证电动自行车在各种路况下的稳定性和安全性。
2. 提高电动自行车控制器的智能化水平。
通过采用ATmega48单片机,实现电动自行车控制器的智能化,增强其对各种情况下的自主判断和应对能力。
3. 对项目的可行性进行评估。
通过市场需求分析、技术方案研究、数学模型的建立等方法,对本项目进行可行性评估,为后期研发提供科学的参考依据。
三、课题研究内容及进度安排1.模拟电路设计及模块测试(预计完成时间:1个月)(1)功率放大模块的设计和测试。
根据电动自行车所需的功率大小,设计并搭建针对电机的功率放大电路,并对其电路参数进行测试和优化。
(2)速度测量和控制模块的设计和测试。
为了实现对电动自行车速度的准确控制,设计并实现一个精细的速度控制电路,并对其电路参数进行测试和优化。
(3)电池状态检测模块的设计和测试。
为了实现对电动自行车电池状态的实时检测,设计并实现一个电池状态检测电路,并对其电路参数进行测试和优化。
2.单片机控制程序编写及调试(预计完成时间:2个月)(1)单片机底层驱动程序编写。
基于ATmega48的防垢水温水位测控仪设计
基于ATmega48的防垢水温水位测控仪设计
谢亮
【期刊名称】《微计算机信息》
【年(卷),期】2008(024)002
【摘要】根据对金属接触式水温水位传感器结垢成因的分析,提出在传感器两端注入对称交流信号抑制水垢形成的方法.介绍了一种基于ATmega48低成本、高性能的太阳能热水器防垢水温水位测控仪的设计.通过对测量噪声的分析,建立"白噪声+工频干扰"的噪声模型.针对这种噪声,运用过采样和求均值的方法提高ADC有效分辨率和改善信噪比,并给出一种抑制工频干扰的方法.
【总页数】3页(P98-99,146)
【作者】谢亮
【作者单位】330013,南昌,江西财经大学电子学院
【正文语种】中文
【中图分类】TP273;TP368
【相关文献】
1.基于MSP430的水池水温、水位监测系统设计 [J], 田芳明;谭峰;赵文阳
2.基于单片机的锅炉水温与水位控制设计 [J], 林继
3.基于单片机的智能水箱水位和水温控制系统的设计 [J], 张金花;周雯超
4.基于单片机的锅炉水温与水位控制设计 [J], 裘继雷
5.基于单片机的水温水位控制系统设计 [J], 鄢来应
因版权原因,仅展示原文概要,查看原文内容请购买。
基于ATmega48单片机的LED照明系统的太阳能控制器设计

基于ATmega48单片机的LED照明系统的太阳能控制器设
计
邢辉;孟丽囡;王加宝;高发亮
【期刊名称】《计算机光盘软件与应用》
【年(卷),期】2011(000)002
【摘要】本文设计了一种简单实用的独立先伏系统的太阳能LED照明系统的控制器,介绍了该控制器的结构及工作原理.该控制器采用光控加时控方式,光控方式能根据外界环境智能调整时段,从而极大提高了系统的效率.采用PWM控制整个系统充电过程,提高充电效率,放电过程采用PWM恒流放电驱动LED,ATmega48设置过充过放自动关断.
【总页数】1页(P154)
【作者】邢辉;孟丽囡;王加宝;高发亮
【作者单位】辽宁工业大学,辽宁锦州,121001;辽宁工业大学,辽宁锦州,121001;辽宁工业大学,辽宁锦州,121001;辽宁工业大学,辽宁锦州,121001
【正文语种】中文
【中图分类】TM571
【相关文献】
1.基于STC单片机的太阳能LED路灯控制器设计 [J], 吴正茂;杨莹;吴勇;周鹏辉
2.基于STC单片机的太阳能LED路灯控制器设计 [J], 吴正茂;杨莹;吴勇;周鹏辉
3.基于单片机的太阳能LED路灯控制器设计 [J], 贾瑞匣;王丽娟
4.基于单片机的太阳能LED照明系统控制器设计 [J], 麦强
5.基于单片机的太阳能LED草坪灯控制器设计 [J], 于莉
因版权原因,仅展示原文概要,查看原文内容请购买。
AVR单片机Atmega48程序设计报告——比赛计时计分器
一、A VR单片机Atmega48程序设计报告——比赛计时计分器本设计是基于ATMEGA48单片机的比赛计时计分器,利用8路7段LED数码管作为显示器件,使用3乘3矩阵式键盘作为输入,要紧用于各类体育比赛记录分数,在此设计中共接入了2个四位一体7段LED数码管显示器,第一个显示器为一个倒数计时,第二个显示器为两队得分。
本设计中的倒数计时器时间为40分钟,能够进行开始计时、暂停计时的操作,分别通过S3_1、S3_2按钮实现,并通过蜂鸣器表示是否操作成功,时间通过1个四位一体7段LED 数码管显示器显示,前两位为分钟数,后两位为秒数。
本设计中能够对两队得分进行加1分、加2分、加3分操作,分别通过S1_1、S1_2、S1_3、S2_1、S2_2、S2_3按钮实现,并通过蜂鸣器的不一致工作方式表示是否操作成功与所加的分值。
得分通过1个四位一体7段LED数码管显示器显示,每队得分显示两位数,显示范围为0~99分。
本设计能够进行清零操作,清零后倒计时恢复40分钟,得分均为0,通过S3_3按钮实现,并通过蜂鸣器表示是否操作成功。
二、设计思路本设计中由AVR核心板、数码管、蜂鸣器、3乘3矩阵键盘四部分构成。
电路中PORT_B 端口连接数码管,显示八位,完成倒计时与记录每队得分,PORT_C与3乘3矩阵键盘相连,由按键操纵完成初始化、开始与暂停计时与加分的功能,PORT_D与蜂鸣器端口相连,根据所加得分的不一致,开始与暂停计时,初始化,蜂鸣器有不一致的应答方式。
本设计中的程序要紧分为两个部分,即暂停计时时的显示与开始计时时的显示。
暂停计时时与开始计时时都能够对每队加分,初始化。
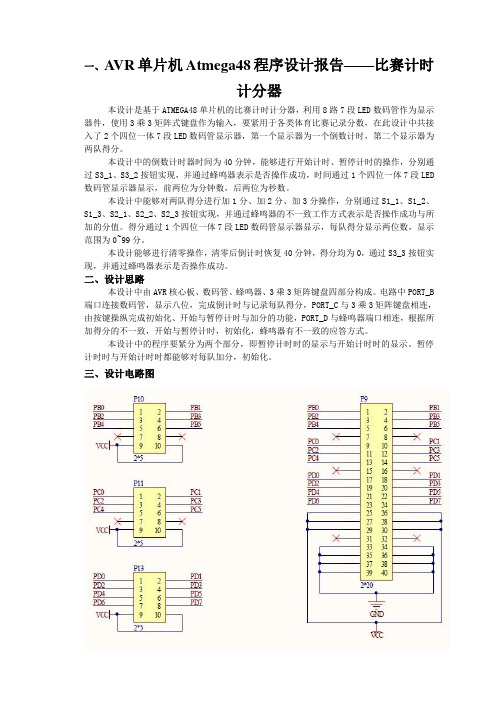
三、设计电路图图一接口模块电路图二蜂鸣器电路图三 8路7段LED数码管电路图四 3*3矩阵操纵键盘电路四、设计过程1、关闭硬件实验平台电源。
2、将下载器与主控单片机的下载口P5相连。
3、使用3条2*5排线连接P10与P14端口、P11与P19端口、P13与P4端口,从电路图上分析,PB口与LED显示器相连,PC口与3*3矩阵按键相连,PD口与蜂鸣器相连。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
t r n u dt n e vo o m e t l o i rn e o etu . u ea d h miiy i n i r n n a n t ig b c m r e m o
Ke r s e e t o i i e s r ie o c e o n t n;e v r n n a n t rn y wo d : l c r n c t e v c ;v ie r c g ii m o n io me t l mo io i g
自动 校对 时钟 的功 能 。并 且 使 用 UART 中断 配 合
பைடு நூலகம்
凌 阳单 片 机 S C 0 1 作 为 系 统 的人 机 交 互 及 生 P E 6A
收稿 日期 :0 70 —O 2 0 —92 作者 简 介 : 正 苏 (9 3 ) 女 , 级 实 验 师 , 究 方 向 : 子 技 术 . 张 16 ̄ , 高 研 电
模块 的 时 问 编 码 , 应 用 全 新 的 C U 管 理 芯 片 并 P
X 2 9的 RT X7 9 C功能 , 通过 秒 输 出 引发 主 控 机外 中
设 计 中采 用 了 ATme a 8单 片 机 的 I P捕 获 g4 C 中断读 取 脉宽 的方 法实 现字 的解 码 。 图 2为 电子授 时 长波 信号 中时 间信息 的接 收芯 片连 线 图 。
时 间标 准 应运 而 生 , 就是 “ 子 钟 ” 这 原 。本 文研 究 国 内外 电子授 时信 息 的编 码 、 段 等 相关 内 容 的 电子 频 信息处 理 方法 和协 议 , 用 和 开 发 基 于 电 子授 时信 应
息接 收部 件 , 现 可根 据 国家 授 时 中心 自动校 准 的 实
gr n e ut m a i r f r a ng coc i a , v c e og to a e or i g o t n r i e, t m p r — a tda o tc p oo e di l k sgn l oie r c nii n nd r p tn f s a da d tm e e a
Z ANG h n — U,H U a— o, ANG ,ZH ANG u - a H Z egS H i b ZH Li Ch n y n
( p. f lcrncE gnei ,Heo gi gIsi t o cn lg , ri 1 0 5 , hn ) Deto eto i n ier g E n i nj n n tue f h oo y Habn 5 0 0 C ia l a t Te
时钟装 置 , 经实 际测试 , 度 达到 国家要 求 。同时该 精 装 置能 检测 温 度 、 度 参 数 , 给 出 是 否 合 适 的 播 湿 并
报。
图 1 系统 框 图
1 系统 硬 件
1 1 主 控单 元 .
本 系统使 用 ATme a8作 为 系统 主 控 单元 , g4 用 它 的 I P捕 获 中断 来 捕 获 电子 授 时 电波 时 间 信 息 C
维普资讯
第 2 卷第 2 2 期
20 年 6 08 月
黑
龙
江
工
程
学
院
学
报( 自然科 学 版)
Vo . 2 № . 12 2
J u n l f i n j n n t ueo e h oo y o r a o l gi gI si t f c n lg He o a t T
J r ,0 8 uL 2 0
ATme a 环 境 监 测 中 时钟 自动 校 对 的应 用 g4 8在
张正 苏 , 胡海波 , 张 立, 张春艳
( 黑龙 江 工 程 学 院 电 子 工 程 系 , 龙 江 哈 尔 滨 1 0 5 ) 黑 50 0
摘
要: 在分析 JY模 式授时信号 的基础上 , J 应用 A Tme a8单 片机实 现 电子 授 时信 号 自动校对 时钟 的功能 , g4 配合
U2
断 , 用其 内 置 的 硬 件 I 采 I C来 操 作 3片 XX 2 9实 79
VCC
PC0N DATA G ND
1
2 3 4
VCC
PCoN I CP GND ATme a 8 g4
现时 钟表 盘 的光指 针 显 示 , 而 实 现 电 子 授 时信 号 从
凌 阳单 片机 S C 0 1 的人机交互 功能的使用 , P E 6A 在环 境监测 中实现标准时 间、 温度及湿度 的语音识别 、 播报 。
关 键 词 : 子 授 时 ; 音 识 别 ; 境 监 测 电 语 环 中图分类号 : 23 TP 7 文 献标 识 码 : A 文 章 编 号 :6 14 7 (0 8 0 —0 10 17 —6 9 2 0 }20 7 —4
社会 的进 步 和科 学 技 术 的 飞 速 发 展 , 人 们 对 使
活环境 的监测 控制 部 分 , 用 其 独 特 的语 音 处 理 能 采
力 , 电路 具有 语 音 识 别 和播 报 功 能 。系统 原 理 框 使
图如 图 1 示 。 所
时间精度 的要求越来越高。一种更为精确和稳定的
Ab ta tBa e n t ea ay i o in la r ig o J m o e n h p l a in o sr c : s d o h n lss fsg a wa d n fJ Y d la d t e a p i to fATm e a 4 CU c g 8M
Ap i a i n o u o a i o f e d ng o he c o k o plc to f a t m tc pr o r a i f t l c f AT m e a 4 nd r e v r nm e a o n t r n g u e n io 8 nt lm r io i g