HMR3000数字罗盘在微型飞行器中的应用
HMR数字罗盘说明书

定向和导航 姿态参考 卫星天线位置 平台水平度 GPS 集成系统 激光侧距机
特征 方向 精度
分辨率 迟滞
重复精度
倾斜和俯仰
精度
分辨率 磁滞 重复性
测试条件
水平 0-30 度(只有 HMR3300) ± 30~60 度(只有 HMR3300)
HMR3200 HMR3300 HMR3200 HMR3300
高斯 微高斯 VDC mA mA 波特
HZ
mm 克
˚C ˚C
模块尺寸约为 37mmX25mm, 8 个针。手持模块时将有管脚内的一边对准自己并把管脚一面朝下。最左边为 PIN1。
Honeywell/Commercial Switch&Sensor 霍尼韦尔商业开关与传感器
数字罗盘 HMR3200/HMR3300
磁场计输出命令 *M<cr><lf>选择磁场计输出模式
格式:Magx,MagY,Magz
举例:1256,-233,1894
SPI(串行外围接口)接口运行模式
SPI 运行模式如下: SCK 空置低
数据输出紧跟于 SCK 下降沿后
数据采样在 SCK 上升沿前
(MODE 协议 HMR3200/HMR3300 模块控制 SCK 和 SDO 脚,主控制器控制 SDI 和 CS 脚,主控制将此 HMR 模块 CS 脚延迟 20ms 开始 SPI 通讯。HMR 模块作为响应会发送 ASCII 的“S”,主控制器同时会发送一个有效命令字符。HMR 模块将估算从主控制器 收到的命令字符;如果命令字符是被认可的并且有效,HMR 模块将传出响应的数据。在发送被请求的数据后,HMR 模块将 结束 SPI 通讯周期。如果命令是不被认可或者无效的,HMR 模块将回应一个 ASCII 的“e”,然后结束 SPI 通讯周期。
磁罗盘HMR3200HMR3300

技术规格:
参数 航向
适用条件
最小值
标准值
最大值
水平
1.0
精度
0°至±30°(仅限HMR3300)
3.0
±30°至±60°(仅限HMR3300)
4.0
分辨率 磁滞性
HMR3200 HMR3300
0.1
0.1
0.2
0.2
0.4
重复性
HMR3200 HMR3300
纵倾与侧倾(仅限HMR3300)
0.1
0.2
NAV Technology
HMR3200/HMR3300
磁罗盘HMR3200/HMR3300
霍尼韦尔HMR3200/3300型数字罗盘是一种电子式 罗盘装置,主要用于航海和导航系统。霍尼韦尔磁阻传感 器为小型的固态电子罗盘装置提供了足够的可靠性和精 确性,这类罗盘装置很容易在系统中集成,只需要使用 ASCII格式的UART或者SPI协议就可以方便地实现。
0.2
0.4
范围
纵倾与侧倾范围
±60°
精度 零位精度*
0°至±30° ±30°至±60°
水平 -20°至+70°热磁滞性能
0.4
0.5
1.0
1.2
0.4
1.0
-40°至+85°热磁滞性能
5.0
分辨率
0.1
磁滞性
0.2
重复性
0.2
磁场
范围
最大磁通量
±2
分辨率 电场
0.1
0.5
输入电压
未调制
6
15
电流 数字接口
25.4×36.8×11
重量
7.5
环境
温度
HMR3000数字罗盘模块解读
HMR3000数字罗盘模块用户指南1、概述Honeywell的HMR3000数字罗盘模块使用磁阻传感器和两轴倾斜传感器来提供航向信息。
带有电子常平架的罗盘即使倾达40°,也能给出精确的航向。
HMR3000内部全部使用表面贴装元件,不含有任何的移动元件,所以非常可靠和坚固。
这个低功耗、小体积的装置带有非铁磁性金属外壳,便于安装固定在任何一个平台上。
HMR3000便于使用,极其多样化。
允许用户对罗盘的输出进行组态,包括六种NMEA标准信息的组合,改变磁场计的测量参数以适应不同应用的需要等。
完善的罗盘自动标定程序将修正平台的磁影响。
磁场计的宽动态范围(±1G或100μT)允许HMR3000工作在当地较大的磁场下。
2、开始了解HMR30002.1辨别产品HMR3000罗盘模块有三种不同的选型(1)带有RS232或RS485接口的电路板(2)带有RS232或RS485接口,带有外壳的罗盘模块(3)演示装置(只有RS232接口)在选型(1)中,接口形式清楚地标在线路板上,在选型(2)中,清楚地标在产品标签上。
选型(3)只有RS232接口。
2.2安装对于演示装置,接口和电源电缆包括在其中(参见“电连接”一节)对于其他的HMR3000选型,用户自己应按照下表制作带有标准9针阴连接器的电缆。
电源只接到第9针或第8针上。
对于多数应用,连接好表1中所列出的几个管脚就可以了,而第1、4、6和7针在HMR3000工作中执行特定的功能,平时应保持其开路(维持逻辑高电平)。
(见表1关于所有管脚的定义)。
有关HMR3000和PC机COM口的连线图请参见图1。
In/Out 名称针号说明TxD/A Out 2 RS232发送/RS485发送-接收信号RxD/B In 3 RS232接收/RS485发送-接收返回GND In 5 电源和信号的公共地6-15V In 9 未稳压的电源输入5V In 8 经过稳压的电源输入表1 HMR3000在平常操作时的管脚定义(参见表3的完整的定义)注意:在8脚上加的电压不要超过+5.5V,以免对元件造成损坏。
罗盘应用及用法
罗盘应用及用法罗盘是一种指示方向的仪器,通过指示地磁场的方向,帮助人们确定自身的朝向。
它的用途非常广泛,可以用于户外定位、航海导航、军事作战、航天探测等众多领域。
那么下面就详细介绍一下罗盘的应用及用法。
首先,罗盘在旅行和户外活动中是一项非常重要的工具。
当我们进行远足、探险或登山等活动时,经常会面临方向迷失的情况,这时候罗盘就能派上用场了。
只要我们根据罗盘指示的方向,就可以迅速找到正确的道路,避免走错方向或走丢。
其次,罗盘在航海导航中也是一项必不可少的工具。
通过测定地磁场的方向,船员们可以准确确定船舶的指南针方向,从而确定船舶的航向。
在没有现代导航设备的年代,罗盘是航海者们重要的航向指示器,保证了船只的安全航行。
在军事领域,罗盘也具有重要的应用价值。
例如,在战场上进行定位、导航和朝向判断的时候,可以由罗盘来指引方向,确保部队的行动准确有效。
此外,罗盘还可以通过指示地磁场的变化,帮助士兵们判断地雷和炸弹等敌方设备的位置,提高战斗的胜率。
另外,罗盘在航天探测中也扮演着重要的角色。
航天器在进入太空之前,通常需要通过罗盘来进行校准和定位,从而确保其在太空中的正确方向和航行路径。
同时,罗盘还可以帮助科学家们进行天文观测,了解地球磁场的变化和太空时空的特性。
除了以上几个领域,罗盘在日常生活中也能发挥一定作用。
譬如,当我们在城市中进行步行或驾驶时,罗盘可以帮助我们快速确定前进方向,避免走错道路;在进行地图阅读时,罗盘可以帮助我们准确理解地图上的指示,找到目标位置等。
在使用罗盘时,首先要保证罗盘处于水平放置,避免重力对指针的干扰。
然后需要把罗盘与地图或目标点对齐,对比罗盘指针和地图上的朝向,来确定正确的方向。
同时还需熟悉和了解罗盘的使用规则和指针的含义,以便正确理解罗盘的指示。
此外,在使用罗盘时还需要注意一些干扰因素。
例如,铁矿石、电线、电子设备等都会对罗盘的指示产生干扰,因此在使用罗盘时应尽量避开这些干扰物。
同时,在使用罗盘进行航海导航时,还需要考虑地球磁场的变化,通过校正和调整罗盘的指示,以保持船舶的正确航向。
Honeywell HMR3000三轴数字罗盘 磁阻传感器 说明书

电子罗盘模块按照NMEA格式,通过RS232/485串口提供航向输出(横滚、俯仰、偏航)采用Honeywell公司的固态磁阻传感器,具有快速的响应时间至20Hz,航向精度为0.5˚ ,分辨率为0.1˚。
快速响应时间小体积低功耗高精度宽的倾斜角度对铁磁物性金属进行补偿使用固态磁传感器提高了响应速度,和万向架固定式的磁通门传感器相比提高了数据更新速度。
仅为一块线路板,重量小于57克,体积为83x25x22mm,铝外壳封装。
功耗小于25mA,可长时间电池供电0.5˚ 航向精度,分辨率0.1˚ ,可适用于严格定向的应用场合。
倾斜角度为±40˚ ,适合于广泛的要求精确的应用通过对因环境中存在铁磁性金属而对地磁场造成的扭曲的补偿,提高精度。
下表显示,9针插头引脚排列,电源可以为调制的5V ,或不调制6—15V ,只有#9针或#8针中的一个,可由给定连接方法连接。
见以下:接口信号描述通信HMR3000 用简单的ASCII 字符与外部主控制器,通过 RS-232 或 RS-485 通讯。
ASCll 码的发送和接收,使用1个起始位,8个数据位(先是LSB,MSB 总为0) ,无奇偶位,和一个停止位,波特率可设置为1200,2400,4800,9600,19200或38400,HMR3000 对所有收到的带校验码的有效输入作反应。
罗盘输出HMR3000输出三种NMEA 标准格式(HDG,HDT 和XDR),三种专用格式(HPR,RCD 和CCD),及一个 ASCll 码航向输出,用于数据显示。
HDG,HDT 和HPR 是最通用格式。
$HCHDG 航向、偏差角、磁偏角$HCHDG, 85.5, 0.0, E, 0.0, E*77$HCHDT,航向、对(True)$HCHDT,271.1,T*2C$PTNTHPR,航向、俯仰和横滚$PTNTHPR,Heading,Heading Status,Pitch,Pitch Status,Roll,Roll Status*hh<cr><lf>$PTNTHPR,85.9,N,-0.9,N,0.8,N*2C名称TxD/B RxD/A GND 6-15V 5VOper/Calib(2)Run/Stop(2)Ready/Sleep(2)Cont/Reset(2)入/出Out In In In In In In In In引脚235981647描述RS-232 发送/ RS-485RS-232 接收 / RS-485电源/信号地未调理的电源电压输入调理的电源电压输入Operate/Calibrate (3) input (open=Operate)Run/Stop (3) input (open=Run)Ready/Sleep (3) input(open=Ready)Continue/Reset (3) input (open=Continue)(典型值)---6-155 ± 5%0-50-50-50-5(最小值)(1)-18-1800-20-20-20-20单位Vdc VdcVdc Vdc Vdc Vdc Vdc Vdc(最大值)(1)1818307.520202014(1) 绝对最大值(2) 沉电流:200µA (典型值), 400mA(最大值)(3) 开路输入 =高电平HMR3000 连线图——计算机RS232 到 HMR3000订货指南HMR3000-Demo-232*.....RS232HMR3000-D00-232..........RS232.........NoneHMR3000-D21-232..........RS232.........Extended BaseHMR3000-D00-485..........RS485.........NoneHMR3000-D21-485..........RS485.........Extended Base*Development Kit includes one module in alu minum enclosure, cablingwith power supply, demonstration software for PC running Windows™and User’s Manual.数值<0.5˚<1.5˚± 0.3˚0.1˚degrees/mils ±40˚±0.4˚±0.6˚±0.2˚0.1˚degree/mils ±1.0 Gauss (最大值)1 mGauss 5.0 Vdc 调理电压6~15Vdc 未调理电压35 mA@6 Vdc13 mA 2.0 mA RS-232RS-4851200 to 38400 bps NMEA 0183连续滤波0.75 oz (22g)3.25 oz (92g)1.2 x 2.95 x 0.7601.5 x 4.2 x 0.88-20 to 70˚C -35 to 100˚C 30 英寸高落下20~2000Hz Random 2 hrs/axisIPC6012IPC610航向角俯仰和横滚磁场电气接口物理环境制造指标1. 航向精度是假设地球磁体只有硬铁干扰,已通过标定进行补偿2. 标定值3. 由设计参数保证4. 典型5. 迟到或超过*器件方向角不超过75˚在工作或贮存时——可引起短暂的精度损失。
HMR3000数字罗盘模块解读

HMR3000数字罗盘模块解读什么是HMR3000数字罗盘模块HMR3000是一种数字罗盘模块,由Honeywell公司生产。
它可以作为导航系统中的关键组件,帮助无人机、机器人和其他导航设备方向感应和定位。
HMR3000数字罗盘模块可以测量三个轴上的磁场,并将结果转换为数字形式供设备使用。
HMR3000数字罗盘模块的特性高精度HMR3000数字罗盘模块具有非常高的精度。
它可以测量其所处的环境中的磁场,这使得导航设备可以确定方向和位置。
抗干扰HMR3000数字罗盘模块具有抗干扰能力。
它可以识别和消除环境中的噪音和干扰,从而确保测量精度的稳定性。
低功耗HMR3000数字罗盘模块拥有低功耗的特性。
这使得它可以在仅有几个电池的情况下运行数天或数周,从而成为无人机和机器人等导航设备的理想选择。
兼容性HMR3000数字罗盘模块具有高度的兼容性。
它可以与各种不同类型的设备进行通信,例如无人机、机器人和其他导航设备。
HMR3000数字罗盘模块的使用方法安装在使用HMR3000数字罗盘模块之前,需要安装它。
将其安装在需要使用导航设备的机器上,然后将接口与其他设备连接。
配置HMR3000数字罗盘模块需要正确配置以实现最佳性能。
可以使用特定软件进行配置,或通过与其他设备连接并发送命令进行配置。
实时测量一旦HMR3000数字罗盘模块正确配置,就可以进行实时测量。
其精度和稳定性将有助于导航设备准确测量方向和位置。
总结HMR3000数字罗盘模块是一款高精度、抗干扰、低功耗和具有高兼容性的导航模块。
它可以作为无人机、机器人和其他导航设备的关键组件,帮助其准确测量方向和位置。
通过安装、配置和实时测量的步骤,可以充分利用HMR3000数字罗盘模块最优秀的性能。
磁罗盘在军事和航空领域的重要性
磁罗盘在军事和航空领域的重要性简介:磁罗盘是一种测量地球磁场的工具,可以在无需依赖其他设备的情况下确定方位。
它在军事和航空领域扮演着重要的角色,为导航和定位提供了精准的数据。
本文将探讨磁罗盘在军事和航空领域的应用,以及它们的重要性。
第一部分:军事领域的应用磁罗盘在军事领域的重要性不可忽视。
它是军队进行定向导航和战术行动的基本工具之一。
以下是磁罗盘在军事领域的一些应用:1. 方向确定:在战场上,军队需要准确地确定方向,以便快速部署兵力和执行任务。
磁罗盘能够精确测量地球磁场,并帮助士兵或指挥官在没有其他导航工具的情况下找到正确的方向。
2. 地图导航:磁罗盘通常与地图配合使用。
士兵可以使用磁罗盘测量地图上的方向,并据此确定自身位置。
这对于发现敌军位置和规划军事行动至关重要。
3. 精确目标定位:军队需要准确地确定目标位置,以便执行精确打击。
磁罗盘可以帮助士兵在地面上迅速确定目标的方位,配合其他装备使用,例如望远镜和无人机,能够提供准确的目标定位。
4. 电子装备校准:现代军队使用各种电子装备,包括雷达和通信设备。
磁罗盘可以帮助校准这些设备的方向性,确保它们能够准确地工作。
第二部分:航空领域的应用磁罗盘在航空领域同样有着重要的应用。
它们成为了飞行员和飞行员学员进行导航和定位的关键工具。
以下是磁罗盘在航空领域的一些应用:1. 飞行导航:飞行员在飞行中需要准确地确定方向和位置。
磁罗盘可以帮助飞行员测量地球磁场,并提供准确的方位数据。
配合无线电导航设备,例如VOR和ADF,飞行员可以准确定位飞机,并执行精确的航线。
2. 飞行训练:飞行员学员需要通过模拟器和实际飞行训练来提高他们的导航技能。
磁罗盘是训练中必不可少的工具之一,它能够帮助学员熟悉和理解航空仪表板上的导航设备,并学会使用磁罗盘进行方向确定和导航。
3. 仪表飞行:在恶劣天气条件下,飞行员无法依赖目视导航。
磁罗盘在仪表飞行中非常重要,可以帮助飞行员测量飞机的方向,并在飞行中提供准确的数据,确保飞机保持正确的航线。
新型电子罗盘在组合航向系统的应用
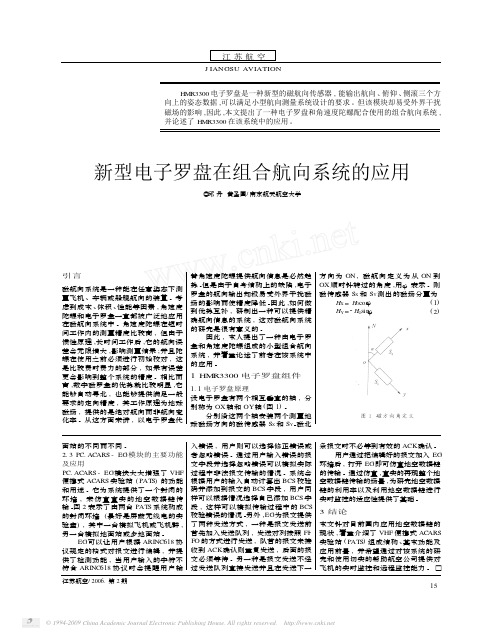
J IAN GSU AVIATIONHMR3300电子罗盘是一种新型的磁航向传感器,能输出航向、俯仰、侧滚三个方向上的姿态数据,可以满足小型航向测量系统设计的要求。
但该模块却易受外界干扰磁场的影响,因此,本文提出了一种电子罗盘和角速度陀螺配合使用的组合航向系统,并论述了HMR3300在该系统中的应用。
新型电子罗盘在组合航向系统的应用◎邱丹黄圣国/南京航天航空大学面站的不同而不同。
2.3PC.AC ARS -EG 模块的主要功能及应用PC.AC ARS -EG 模块大大增强了VHF 便携式AC ARS 实验站(PAT S )的功能和用途。
它为系统提供了一个封闭的环境,来仿真真实的地空数据链传输。
图2表示了由两台PAT S 系统构成的封闭环境(最好是屏蔽无线电的实验室),其中一台模拟飞机或飞机群,另一台模拟地面站或多地面站。
EG 可以让用户根据ARINC618协议规定的格式对报文进行编辑,并提供了检测功能,当用户输入的字符不符合ARINC618协议时会提醒用户输入错误,用户则可以选择修正错误或者忽略错误。
通过用户输入错误的报文字段并选择忽略错误可以模拟实际过程中非法报文传输的情况。
系统会根据用户的输入自动计算出BCS 校验码并添加到报文的BCS 字段,用户同样可以根据情况选择自己添加BCS 字段,这样可以模拟传输过程中的BCS 校验错误的情况。
另外,EG 为报文提供了两种发送方式,一种是报文发送前首先加入发送队列,发送对列按照FI 2FO 的方式进行发送,队首的报文未接收到ACK 确认则重复发送,后面的报文必须等待。
另一种是报文发送不经过发送队列直接发送并且在发送下一条报文时不必等到有效的ACK 确认。
用户通过把编辑好的报文加入EG 环境后,打开EG 即可仿真地空数据链的传输。
通过仿真,真实的再现整个地空数据链传输的场景,为研究地空数据链的利用率以及利用地空数据链进行实时监控的适应性提供了基础。
3结论本文针对目前国内应用地空数据链的现状,着重介绍了VHF 便携式AC ARS 实验站(PAT S )组成结构、基本功能及应用前景,并希望通过对该系统的研究和使用切实的帮助航空公司提供对飞机的实时监控和远程监控能力。
Honeywell HMR3200 HMR3300型数字罗盘用户手册说明书

HMR3200/HMR3300型数字罗盘用户手册目录概述 (3)规格性能参数 (3)插脚配置 (4)电路说明 (4)结构参数 (5)应用说明 (6)UART通讯协议 (6)运行命令 (6)设置命令 (7)磁场滤波器 (8)响应命令 (8)数字表示 (9)SPI时间设定 (9)电路板模块演示套件 (10)通讯开发套件 (10)开发套件安装 (10)HMR3200型演示程序的操作 (11)HMR3300型演示程序的操作 (11)简介霍尼韦尔HMR3200/HMR3300型数字罗盘是一种电子式罗盘装置,主要用于航海和导航系统,霍尼韦尔磁阻传感器为这些小型的固态电子罗盘装置提供了足够的可靠性和精确性,这类罗盘装置很容易在系统中集成,只需要使用ASCII格式的UART或者SPI 协议就可以方便地实现。
HMR3200型数字罗盘是双轴式罗盘,既可以用于垂直方向的探测,也可以用于水平方向的探测。
HMR3300型数字罗盘是三轴式罗盘,属于可以倾斜补偿的罗盘,由于使用了双轴式加速度计,性能得到了极大的提高,倾斜角度可以达到±60°。
技术规格参数适用条件最小值标准值最大值单位航向精度水平0°至±30°(仅HMR3300)±30°至±60°(仅HMR3300) 1.03.04.0RMS 度(°)分辨率 0.1 度(°)磁滞性HMR3200HMR3300 0.10.20.20.4度(°)重复性HMR3200HMR3300 0.10.20.20.4度(°)纵倾与侧倾(仅HMR3300)范围纵倾与侧倾范围 ±60° 度(°)精度0至±30°±30°至±60° 0.41.00.51.2度(°)零位精度水平-20°至+70°热磁滞性能-40°至+85°热磁滞性能 0.41.0度(°)分辨率 0.1 度磁滞性 0.2 度重复性 0.2 度磁场范围最大磁通量 ±2 高斯分辨率 0.1 毫高斯电场输入电压未调制 6 15 直流电压电流HMR3200HMR3300 18222024mAmA参数适用条件最小值标准值最大值单位数字接口UART协议 ASCII(1启动、8数字、1停止、无奇偶校验)用户可以选择波特率2400 19200波特SPI CKE=0, CKP=0虚拟主通道更新速率连续/选通/平均HMR3200 HMR3300 158Hz连接器在线8插脚模块(间距0.1”)物理量外形尺寸电路板组件 25.4×36.8×11mm重量HMR3200HMR3300 7.257.5g环境温度工作温度(HMR3200)工作温度(HMR3300)储存温度-40-20-55---+85+70+125°C插脚配置插脚编号插脚名称描述1 SCKSPI 模式串行时钟输出2 RX/SDIUART 接收数据/SPI 数据输入3 TX/SDOUART 发送数据/SPI 数据输出4 CSSPI模式(输入)时选用跟踪侧模块5 CAL开关触发(输入)跟踪侧校正6 +5VDC*备选的+5VDC 电源(输入)7 接地电源和信号接地8 +V*未稳压的电源输入(+6 到+15VDC)*注:电路板可以用插脚6(+5VDC)或插脚8(+V)接口供电,手持模块时将插脚侧靠近自己,并将插脚朝下,则最左边为插脚1。
磁罗盘在航天飞行器中的导航解决方案

磁罗盘在航天飞行器中的导航解决方案导言:随着人类对宇宙的探索不断深入,航天飞行器的导航问题也成为关注的焦点。
在航天器中,位置信息的准确获取对于控制和导航是至关重要的。
目前,除了各种现代导航技术外,磁罗盘作为一种简单而可靠的导航工具,也被应用于航天飞行器中的导航解决方案。
本文将探讨磁罗盘在航天飞行器导航中的应用和相关技术。
一、磁罗盘在航天飞行器导航中的基本原理磁罗盘是一种利用地球的地磁场来确定方向的仪器。
它通过测量地磁场的强度和方向,以确定航天器相对于地球真北方向的角度。
当航天器在地球轨道中运行时,它能够提供方向指示,帮助航天员掌握航向,确保航天器按照预定轨道进行飞行。
磁罗盘常常采用了一种叫做磁致伸缩的材料,当受到外部磁场的影响时,磁罗盘内部的磁体会发生形变,从而使得磁致伸缩材料的尺寸发生变化。
这种变化会导致内部传感器的输出电压发生变化,通过这种变化可以准确测量地磁场的强度和方向。
二、航天飞行器导航中的磁罗盘应用1.方向测量与定位:航天飞行器需要准确测量自身的方向以及相对于目标的位置。
磁罗盘可以通过测量地磁场来提供方位角度的信息,使航天员能够准确掌握航向。
同时,结合其他导航系统(如GPS或星车),磁罗盘可以定位航天器的位置,确保它按照预定轨道飞行。
2.航向控制:磁罗盘在航向控制中起着至关重要的作用。
通过实时检测航向的偏差并通过调整航向控制系统来实时纠正,磁罗盘可以确保航天飞行器按照预定航向进行飞行。
这对于长期飞行任务和航天器的姿态稳定至关重要。
3.跟踪和测量轨道参数:磁罗盘还可以用于跟踪航天器在轨道上的位置,并测量一些关键的轨道参数,如倾角和偏斜角。
这些参数对于任何航天任务的成功实施都是至关重要的。
三、航天飞行器导航中的磁罗盘技术挑战尽管磁罗盘作为一种简单可靠的导航工具被广泛应用于航天飞行器,但在实际应用中仍然面临一些技术挑战。
1.信噪比问题:航天飞行器通常在复杂的电磁环境中工作,这可能会导致磁致伸缩材料受到附加的外界磁场干扰,进而影响磁罗盘的测量精度。
机器人导航中数字罗盘HMR3000的数据处理方法
式中, 系统状态转移矩阵: 1 * #& 5 1 + & 4 ’ 1
[ ]
(3)
,& 是协方差为 - 的系统噪声矩阵, ! & 是系 统噪声矩阵 的驱动矩阵, 本系统 中为 .。系统 的 量测方程为: / & 4 0& )& 5 1& (8) 式中 0& 为系统量测矩阵, 本系统中为 . 。 1& 是协 方差为 $ 的量测噪声矩阵。则通过下面的公式, 就可以估计出机器人的航向值: 2 & 5 1 + & 4 # & 5 1+ & ) 2 & +& ) 3 & 5 1 + & 4 # & 5 1+ & 3 & + & #
*+,$"""
的 数 据 处 理 方 法
邓鲁华- 宗光华- 王- 巍
( 北京航空航天大学 机械工程及自动化学院,北京 - !"""%$)
摘- 要: 介绍了 *+,$""" 型数字罗盘的主要性能, 根据罗盘在移动机器人导航 中的应用, 对航向 和俯 仰、 横滚输出数据设计了不同的卡尔 曼滤波 器, 有效地消 除了罗 盘输出 数据的 波动, 使机器 人姿 态测量精度稳定在 !. 左 右, 证 明了 *+,$""" 型数 字罗 盘在 机器人 导航 领域应 用的 良好效 果。 关 键词: *+,$""" 数字罗盘; 机 器人; 导航;卡尔曼滤波 中图 分类号: /’)!0 ) ; 12’)’ 文献标识码: 3
HONEYWELL 如何从 HMR3000数字罗盘得到稳定输出 说明

IIR 滤波器的应用IIR 滤波器的滤波作用,由一个可调时间参数TC1 决定的. 此滤波器对5个磁场数据都起作用. 上图指出了IIR 滤波器对于航向输出的影响.非线性航向滤波器的应用此过滤器仅用于航向输出,由两个用户可选的参数L 和S 控制.它的调节,可以导致大范围的滤波,也可以是细微的滤波,或罗盘航向大的变动时不滤波.参数L 的值,为滤波器选择了 '噪音阈值',当它较小时,会限制罗盘航向的小变化时的滤波作用.增大L 值,会对罗盘航向的大变化起滤波作用,就象噪声一样.若L 值给定时,S 值会决定对有噪声的航向数据的平波处理.S 值越小,波形越平稳,反之亦然.在实际应用中,人们会要求L 值越小越好,S 值越大越好.然而,滤波器的效果是L 和S 值的组合.滤波器的实际的使用是 :非线性航向滤波的计算(以下的计算,以13.75Hz 频率重复) :设:CH=当前航向,SH=平波后的值,L(整数,且>0,0=失效),S(小数值,>0且<1,0=失效,最大值=0.999985)则:D=CH-SH(差值),G=S+S*(D/L)**2(D/L 大时,G 会闭合,S<=G<=1),SH=SH+D*G(当G=1时,SH=CH)在动态环境下,常常需要使用罗盘,因而不可避免对滤波器有要求.既然在不同的应用中,存在不同的环境,因而往往需要一个可调的滤波器,而不是固定的,通用的滤波器.因此,我们已提供了用户可设置的滤波器.本文,就是针对Honeywell 公司的数字罗盘计HMR3000,介绍了如何使用它自带的滤波器,来得到它的稳定的航向输出.罗盘的输出不能稳定,原因有很多,但是当用于驱动一个显示,或用于回馈控制回路,如自动舵等,这个输出就不是很理想.因此,能够将输出过滤一下,可以使此产品的功能得到成功的优化.航向的不稳定,归咎于罗盘的附件区域的磁场波动,和罗盘的安装平台倾斜角度的波动.磁场的波动归咎于罗盘附件的直流或交流电的电气情况,或任何磁性材料的周期的或随机的运动,如机床,执行器等安装平台的任何摇动,加速度,减速,或随机的震动,都会导致倾斜传感器中的液体处于动态,导致倾斜输出的噪音和航向输出的不稳定.要克服此问题,HMR3000装备了两种滤波器,用户都可以调节.首先,它有一个IIR 类型的滤波器,为5个原始的磁场数据输出同时服务.其次,有一个非线性滤波器,仅为航向数据服务.在HMR3000工作于 “连续”模式时,每隔72.7ms 或在13.75Hz 频率下,可得到一套原始的磁场数据,即这些数字滤波器的输入值.HMR3000的输出频率可以不是13.75Hz,但滤波的效果,与罗盘的输出信息和输出频率无关,因为滤波的发生频率为13.75Hz.任何滤波都会导致,罗盘输出的航向值与实际航向之间有时间上的滞后.因此,对平波器的使用和滞后时间两种之间的平衡,是非常重要的.下左图显示了一个非线性滤波器的应用,不同的L值的影响,航向数据在325度和322度之间振荡,下右图显示了对于L和S都是定值时,滤波器对于航向的一些较大变化的过滤效果.这种过滤器, 不象IIR 过滤器,不会在航向大幅变化时,导致时间滞后.使用仿真方法通过自带的Excel表格仿真方法,可以使您获得最适当的过滤参数.1.在应用环境中,安装HMR3000.2.设置参数为: TC1=0, TC2=0, L=03.将HMR3000设置成以每分钟825个句子的更新速率输出CCD数据.4.正常输出时,将数据导入Excel表格.5.通过不同的过滤参数测试,得到最适当的设置.。
数字电子罗盘HMR3000的特性及应用

使用前面叙述的串口协议,外部的主机可以用下 面的指令直接操作 HMR3000。现把一些较重要输入指 令列在表 1 中。
char stop[]={'#','F','A','0','.','3','=','0','*','2','7','\15','\12','\0'};
char acq[]={'#','B','A','4','H','?','*','4','0','\15','\12','\0'};
len=strlen(acq);
LE=strlen(stop); outport(0x3fb,0x80);
/*串口初始化:波特率
19200,1位起始位*/
outport(0x3f9,0); outport(0x3f8,0x06); /*8位数据位,1位停
止位,无奇偶校验*/
outport(0x3fb,7);
outport(0x3f9,0); for(i=0;i<LE;i++)
HMR3000数字罗盘在船舶导航中的应用

行控 制 船舶 上H 3 0 数 字 罗盘 由三 轴磁 阻传感 MR 0 0
器和 两轴倾 斜传 感器 组成 三轴 磁 阻传感 器测 量 三 个 轴 向角度 变 化所 引起 的磁 场变 化 . 根据 这 个变 化 和倾 斜 传感 器所 测 量 的角 度 . 生倾 斜补 偿 的三 个 产
衡 .尤 其是 操 舵所 需 的 指 向设 备方 面还 比较 落 后 , 目前 世 界 上 基 本 都 是 用 电 罗 经 和 磁 罗 经作 为 指 向 设 备 。 由于 电 罗经启 动 后 较长 时 间 才能 稳 定 、 螺 陀 球 转 速高 、 损 大 、 磨 寿命 短 、 格 高 、 障多 、 大 功 价 故 需 率 电源供 应 等诸 多 缺点 造 成使 用 上 的不 便 . 而基 于
2 HMR3 0 0 0的接 口电路设计
一
以其 价格 便 宜 、 作简 单 、 操 具有 数 字 化接 口 、 于 数 便 据 处 理 等优 势 . 船舶 导 航 中得 到越 来 越 普遍 的应 在
用
般 采 用 单 片 机 作 为 微 处 理 器 来 实 现 导 航 系
统 单 片机 要 完 成 的工 作 有 :首先 通 过 串行 口对
摘
要
H 30 ̄ MR 0 0
盘 能 实 时 输 出 载 体 的 航 向 、 仰 和 横 滚 二个 方 向 上 的 姿 态 数据 , 俯 三 因而 能 满 足 船 舶 电子 导 航 在 控 制 系
统设 计 要 求 。介 绍 了 数 字 罗 盘 的应 用 , 出 了系 统 设 计 的 接 口电路 和 实验 结 果 。 给
维普资讯
第 6卷
HMR3000电子罗盘与DSP的接口设计及编程(精)

HMR3000电子罗盘与DSP的接口设计及编程摘要:针对光电搜索侦察系统报告搜索到的空中目标当前方位、俯仰位置给后端武器打击系统的需要,在光电搜索系统与后端武器打击系统之间建立大地坐标系是解决此类问题的较好方法,以便后端武器打击系统指向搜索到的空中目标。
介绍了数字电子罗盘HMR3000的接口特性,给出了HMR3000的控制编程以及与DSP的接口电路,同时也给出了HMR3000电子罗盘获取光电搜索系统平台方位轴系相对地理正北的获取流程和编程实现方法以及DSP端相关程序。
结果表明系统坐标系建立精度达到±0.5°,重复精度达到±0.1°,且能稳定运行。
关键词:RS422;数字电子罗盘;光电搜索侦察系统;DSP;NMEA标准;微处理器美国Honeywell公司生产的数字罗盘模块HMR3000使用磁阻传感器和两轴倾斜传感器来提供航向信息,带有电子常平架的罗盘即使倾斜40°也能给出精确的航向。
该电子罗盘广泛应用于航海、航天、测量系统等领域。
HMR3000内部全部使用表面贴装元件,不含有任何的移动元件,所以非常可靠和坚固。
这个低功耗、小体积的装置带有非铁磁性金属外壳,便于安装固定在任何一个平台上。
允许用户对罗盘的输出进行组态,包括3类NMEA标准信息(HDG、 HDT 和XDR),3类专用语句(HPR、RCD和CCD)。
该模块内置微处理器控制传感器的测量顺序,控制器操作的参数存储在EEPROM中,输出的语句满足NMEA0813标准。
光电搜索侦察系统与后端武器打击系统通过有线或无线连接时,两个系统往往处于地球上不同的位置,如何将光电搜索系统搜索到的空中目标方位、俯仰位置传递到后端武器打击系统,成为后端武器打击系统有效打击目标的关键。
一般而言,两个系统安装处于地球的水平面且有机械或电子调平装置,这样空中目标的俯仰位置对两个系统平台而言是相同的。
但空中目标对于两个系统平台方位而言却存在不同,基于地理正北固定不变原理,通过获取系统相对地理正北顺时针夹角,即可将光电搜索侦察系统指向目标的方位值报告给后端武器打击系统。
磁罗盘和仪器导航的结合应用
磁罗盘和仪器导航的结合应用导航对于人类的出行和探索活动来说至关重要。
随着技术的进步,磁罗盘和仪器导航相结合的应用已经成为现代导航系统中一项重要的技术。
磁罗盘作为测定方向的基本工具,结合各类仪器导航设备,可以大大提高导航精确度和效果。
磁罗盘作为一种使用磁性针指示方向的仪器,广泛应用于探险、航海、军事和航空等领域。
它利用地球自身的磁场来确定方向,通过指示磁北极和地理北极之间的角度差来确定方向。
然而,磁罗盘本身并不能提供准确的定位信息,只能提供方向的指示。
因此,结合其他仪器导航设备可以弥补磁罗盘的不足,从而提高导航的精确度和可靠性。
一种常用的结合应用是将磁罗盘与全球卫星导航系统(GNSS)相结合。
GNSS 是依靠一组卫星来提供全球定位和导航服务的系统,最著名的例子就是GPS(全球定位系统)。
磁罗盘在这种结合中可以用作指示方向的工具,而GNSS可以提供精确的位置信息。
通过将磁罗盘和GNSS的读数进行比较,我们可以准确地确定自己所处的位置和方向。
这种结合应用广泛用于航空、航海和探险等领域,使得导航变得更加方便和可靠。
除了GNSS,惯性导航系统也是与磁罗盘结合的一种常见应用。
惯性导航系统是一种利用陀螺仪和加速度计等传感器来测量加速度和角速度的设备。
通过将惯性导航系统与磁罗盘相结合,我们既可以获得定位信息,又可以获得方向指示。
惯性导航系统的优势在于可以提供连续的定位和导航信息,即使在没有外部信号或遮挡的情况下仍然能够正常工作。
这种结合应用在飞机、船舶和导弹等需要长时间无人操控的场景中尤为重要。
此外,磁罗盘和雷达也可以结合使用。
雷达是一种利用无线电波来探测和测量目标位置和速度的装置。
将磁罗盘与雷达结合可以用来确定目标的相对位置和方向。
磁罗盘提供了目标的方向信息,而雷达可以提供目标的距离和速度信息。
这种结合应用在军事和航海导航中起着重要作用,使得使用者可以准确地确定目标的位置和运动状态。
总的来说,磁罗盘和仪器导航的结合应用在现代导航系统中具有重要地位。
微小型无人机用微磁数字罗盘集成系统的设计
微小型无人机用微磁数字罗盘集成系统的设计马珍珍;盛蔚;房建成【期刊名称】《航空学报》【年(卷),期】2008(029)004【摘要】针对现有微磁数字罗盘成本高、输出频率低、动态定姿时易发散等问题,结合微小型无人机(MUAV)导航与控制系统的组成特点,设计了一种利用MUAV机载微惯性测量单元(MIMU)中的天向陀螺输出判断无人机的运动状态,采用MIMU 中的3轴加速度计组件测量的地球重力矢量,配合3轴磁阻传感器测量的地球磁场矢量,共同进行姿态确定的微磁数字罗盘集成系统.对传统的环境干扰磁场校正方法进行了完善与验证,使之适合于空间三维定姿.试验结果表明:系统总体性能良好,航向精度可达0.5°,成本为同类产品的1/5,输出响应可达50 Hz,满足应用于MUAV导航控制系统的微磁数字罗盘的高精度、低成本和实时性的要求.【总页数】8页(P973-980)【作者】马珍珍;盛蔚;房建成【作者单位】北京航空航天大学,仪器科学与光电工程学院,北京,100083;北京航空航天大学,仪器科学与光电工程学院,北京,100083;北京航空航天大学,仪器科学与光电工程学院,北京,100083【正文语种】中文【中图分类】V241.61+1【相关文献】1.《电机数字控制系统集成设计》系列讲座(九)第5章基于DSP架构交流电机数字控制系统集成设计 [J], 杨贵杰;崔乃政;2.《电机数字控制系统集成设计》系列讲座(十)第6章基于MCU架构交流电机数字控制系统集成设计 [J], 杨贵杰;崔乃政;宋合义;3.《电机数字控制系统集成设计》系列讲座(十一)第6章基于MCU架构交流电机数字控制系统集成设计 [J], 杨贵杰;崔乃政;李彦;4.《电机数字控制系统集成设计》系列讲座(十二)第6章基于HCU架构交流电机数字控制系统集成设计 [J], 杨贵杰;崔乃政;范国权;5.微小型无人机无线数字视频传输系统的设计与实现 [J], 黄家威;罗卫兵;邵华因版权原因,仅展示原文概要,查看原文内容请购买。
机载无线电罗盘定向原理研究

机载无线电罗盘定向原理研究作者:田鹏金皓王春雨来源:《科技视界》 2014年第30期田鹏1 金皓1 王春雨2(1.中国人民解放军空军航空大学飞行教官训练基地一团,吉林长春 130022;2.中国人民解放军空军航空大学飞行器控制系,吉林长春 130022)【摘要】某型无线电罗盘是飞机上重要的领航设备。
本文阐述无线电罗盘的功用、定向原理,对正确使用无线电罗盘实施空中领航具有重要意义。
【关键词】无线电罗盘;定向原理;飞行员无线电罗盘是利用无线电技术进行定向的导航设备。
它可以根据地面导航台发射的无线电波的来向,自动地测出电台相对方位角。
飞行员可借助于航向指示器所指示的电台相对方位角,飞越战区或返回基地,所以罗盘对保障作战训练、飞行安全起着重要的作用。
1 功用无线电罗盘的主要功用是自动定向。
它是利用罗盘天线接收地面导航台(无线电台)发射的无线电波,使测角系统的搜索线圈自动跟踪电波来向,因而能连续地测出从飞机纵轴顺时针到电波来向的角度,并由航向指示器指示出这个角度——电台相对方位角(DXF)。
飞行员根据此方位角,就可以驾驶飞机向导航台飞行或背导航台飞行;可以测定飞机所在位置:在能见度不好时,还可以与无线电高度表、信标接收机等配合,进行仪表着陆等。
2 罗盘定向基本原理2.1 环形天线的方向性环形天线是一种常用的方向性天线,它是一个多匝线圈,并绕在由高频导磁材料制成的矩形铁心上,其电波传播与环形天线的关系如图1所示。
当电波通过环形天线时,环形天线产生的感应电势为:eB=ep=Epmcosθcosωt(1)式中,Epm为环形天线感应电势的振幅,其表达式为:式中,N为环形天线的匝数,λ为无线电波的波长,S为环形天线的闭合面积,θ为环形天线平面与电波传播方向的夹角。
由公式(1)和(2)可知,环形天线的感应电势有如下几个特点:第一,环形天线感应电势和电波场强的相位相差90°。
第二,环形天线的感应电势的大小和电波在水平平面上的来向有关,当θ为90°或270°时,cosθ=0,环形天线的感应电势为零;当θ为0°或180°时,cosθ=±1,环形天线的感应电势绝对值最大;当电波的来向相反时,环形天线感应电势的相位也正好相差180°。
基于DSP的微型飞行器磁罗盘

基于DSP的微型飞行器磁罗盘
陈美丽;昂海松;高月山;郑祥明
【期刊名称】《传感器与微系统》
【年(卷),期】2008(027)003
【摘要】介绍了一种基于数字信号处理器(DSP)的微型飞行器(MAV)磁罗盘,它包括S/R电路,三轴磁阻传感器、信号调理电路和DSP.为了使传感器达到最高的精度,设计了S/R开关电路,消除了高磁场對输出的影响和温度变化引起的偏置误差.详细分析了磁罗盘的误差来源,给出其误差模型,并提出一种非线性、两步补偿算法,此算法也适用于其他存在比例、偏置和非正交误差的二维或三维传感器.经实验测试,该微型磁罗盘误差小于1.2°,且具有体积小、重量轻、功耗低、工作可靠等特点.【总页数】3页(P94-96)
【作者】陈美丽;昂海松;高月山;郑祥明
【作者单位】南京航空航天大学航空字航学院,江苏,南京,210016;南京航空航天大学航空字航学院,江苏,南京,210016;南京航空航天大学航空字航学院,江苏,南
京,210016;南京航空航天大学航空字航学院,江苏,南京,210016
【正文语种】中文
【中图分类】V241.61+1
【相关文献】
1.一种基于超限学习机的电子磁罗盘非线性误差补偿方法 [J], 韦宝泉;陈忠斌;林知明
2.基于Labview的磁罗盘测试系统设计与实现 [J], 吕事桂;孙浩谋;刘学业
3.基于DSP的微型飞行器空速计 [J], 王秀琳;曹云峰;程月华;陆广平
4.基于DSP的微型飞行器高度计的研制 [J], 王秀琳;曹云峰
5.基于PNI磁罗盘的矿用筛管手持式轨迹仪研究 [J], 刘耀波
因版权原因,仅展示原文概要,查看原文内容请购买。
浅析飞机无线电罗盘数字化设计
浅析飞机无线电罗盘数字化设计
那宇
【期刊名称】《军民两用技术与产品》
【年(卷),期】2017(000)002
【摘要】无线电罗盘被广泛的应用在导航的领域中,无线电罗盘也是每个飞机上必要的也是最重要的一个装备部分,无线电罗盘的数字化设计可以便捷主机收发信号,它也可以定位飞机并且进行导航功能,因此在飞行过程中,无线电罗盘可进行指引航向的功能.并且一旦飞机出现事故时,该部分也可以作为寻找的线索一遍更快的找到目标.所以无线电罗盘的抗干扰能力也是其最重要的指标之一.本文主要针对飞机无线电罗盘的数字化的抗干扰设计展开几个重要部分的讨论.
【总页数】1页(P33)
【作者】那宇
【作者单位】天津航新航空科技有限公司,天津 300000
【正文语种】中文
【相关文献】
1.浅谈飞机无线电罗盘数字化设计与抗干扰研究 [J], 王钰霖;王世琪;孙哲;荆献勇
2.浅析飞机无线电罗盘数字化设计 [J], 那宇
3.飞机无线电罗盘数字化设计与抗干扰研究 [J], 王旭;刘百新;董志远
4.浅析数字化关联设计在飞机设计中的应用 [J], 陈双;徐望
5.浅析飞机结构件数字化设计与制造技术 [J], 王响;覃芳艳;王鑫
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
HMR3000数字罗盘在微型飞行器中的应用陈皓生,徐 军,李 疆(清华大学精密仪器与机械学系,北京100084)摘 要:HMR3000数字罗盘体积小,质量轻,并能输出飞行器俯仰、航向、滚转三个方向上的姿态数据,因而能满足微型飞行器飞行控制系统设计的要求。
但是HMR3000的输出数据并不能直接为控制系统所用,必须设计接口电路,使数字罗盘的输出能配合微型飞行器控制系统的工作,并可作为在微型控制系统中使用串行异步通信数据的参考方法。
关键词:数字罗盘;微型飞行器;飞行控制中图分类号:TP212.12 文献标识码:A 文章编号:1000-9787(2001)09-0044-03 Application of HMR3000digital compass in micro air vehicleCHEN Hao2sheng,XU J un,L I Jiang(Dept.of Precision I nst.&Mech.,Tsinghu a U niversity,B eijing100084,China)Abstract:Because the light weight and small volume,HMR3000digital compass can well fit the need of micro air vehicle(MAV)control system.Before it can work in the control system,the interface circuit must be well de2 signed.The circuit provides an example about how to use HMR3000in the control system.Also,it introduced a way to solve such problems in dealing with the serial communication of MAV’s control system.K ey w ords:digital compass;micro air vehicle(MAV);flight control0 引 言当前对微型大气飞行器(micro air vehicle简称MAV)的研究十分广泛。
这种飞行器的直径或翼展在25cm以下,质量在几十g至500g之间。
为提高微型飞行器的实用价值,必须设计飞行器的控制系统。
由于体积和载荷的限制,微型飞行器控制系统中使用的传感器必须体积小、质量轻,并且在功能上要能快速、准确地获得飞行器的姿态数据。
HMR3000数字罗盘能集三个轴向的转动角度测量于一体,并且在体积和质量上能很好地满足设计需要,是一种非常适用于微型飞行器的传感器。
就有关数字罗盘在微型飞行器中的使用方法进行探讨。
1 HMR3000在微型飞行器中的应用微型飞行器的控制系统主要是进行导航、姿态监测和增稳。
传感器的作用是测量各个轴向上的角度和角速度、速度等数据,形成反馈回路参与飞行控制。
目前微型飞行器上安装的陀螺大多是压电晶体类型的角速度陀螺,主要用于飞行器增稳[1]。
但要收稿日期:2001-05-07满足飞行控制系统对导航和姿态监测的要求,还要用到角度传感器。
由于微型飞行器的特殊性,选择姿态角度传感器的要求是:体积和质量不能超出微型飞行器的有效载荷;数据的刷新率必须快于飞行器动态响应速度;测量的准确度必须满足控制算法的要求;输出必须可靠。
目前,比较典型的传感器有HMR3000数字罗盘。
HMR3000数字罗盘在目前的使用中大多用作姿态反馈和纠正。
其外形尺寸为7.49cm×3.05cm×0.87cm,质量约30g(不含保护性外壳)。
HMR3000数字罗盘由三轴磁阻传感器和一个充有液体的两轴倾斜传感器组成,三轴磁阻传感器测量三个轴向角度变化所引起的磁场变化,根据这个变化和倾斜传感器所测量的水平角度,产生倾斜补偿的三个轴向角度变化数据。
其内部单片机控制传感器的测量时序,能及时获得当前飞行器航向和机体的水平姿态。
在通常的工作状态下,HMR3000进行7次测量:4次倾斜和3次磁场测量,然后产生出航向、滚转和俯仰角度数据。
HMR3000的测量准确度是0.5°,分辨力是0.1°。
罗盘在倾斜40°的情44 传感器技术(Journal of Transducer Technology) 2001年第20卷第9期况下也能给出精确的航向信息。
HMR3000和外部的数据交换主要根据NM EA0183标准进行串行异步通信。
和外部的接口有RS232或者RS485两种方式。
传输波特率可选择从1200到38400波特不等。
从以上的参数可以看出,HMR3000在性能上,尤其是在体积和质量上能满足微型飞行器控制系统的要求。
但在控制系统中,HMR3000数字罗盘的使用还存在一些问题,其中最主要的是:需要重新设计接口电路。
2 HMR3000接口电路的设计在设计微型飞行器的控制系统时,一般采用单片机来实现飞行控制系统的控制算法。
单片机要完成的工作有:首先获得外部控制指令,并等待通过串行通信获得HMR3000数字罗盘的反馈信号,从而实现控制算法,最后将运算结果输出给舵机。
这样,单片机一方面要处理控制信号的中断和实现控制算法,另一方面要和数字罗盘进行串行数据通信,在实际应用中存在很大的困难:(1)运算速度受影响。
HMR3000输出的飞行器姿态数据被用来作为反馈数据参考,而串行通信的速度较慢,会产生控制算法等待数据的状态,从而延误指令输出;(2)数据的可靠性差。
控制算法和串行通信两个部分都要保证实时性和连续性,但是单片机最主要的任务是完成控制算法并处理控制指令输入和输出的中断。
这样,单片机就有可能无法及时响应和处理串行通信的中断。
同时,又因单片机中的串行寄存器SBU F只能保留一个字节的数据,就可能造成传输数据的丢失或错误,从而影响串行通信数据接收的可靠性;(3)资源紧张。
HMR3000输出的RS232信号数据是ASCII码,并不能被单片机直接拿来运算,通用的单片机一般都是用汇编或者C51等语言进行编程,要将ASCII码字符转换成二进制数才能用来运算。
这个工作量对于一个单片机的中断服务程序来说相当大,转换过程要大量占用单片机内部数据区,会引起单片机资源紧张。
所以HMR3000所提供的RS232数据接口不能直接适用于微型飞行器控制系统。
提供的解决办法是飞行器的控制系统采用主从单片机的方案。
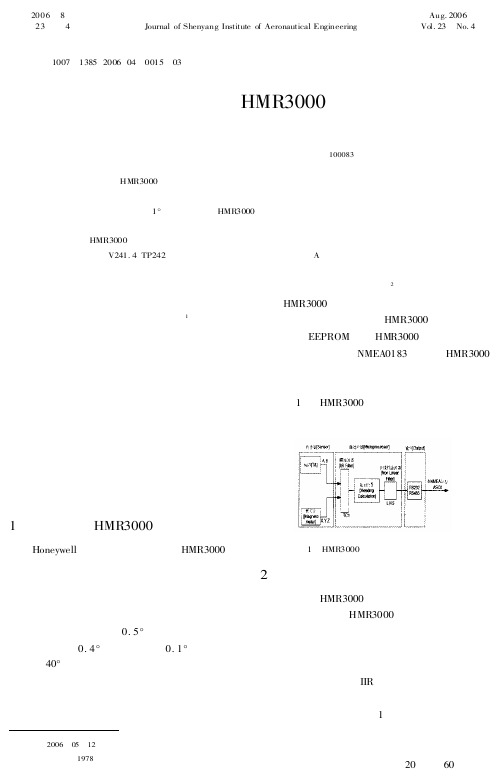
电路的结构如图1所示。
图1 H MR3000接口电路的设计Fig.1 Interface circuit of H MR3000 图1中,主单片机负责控制算法的实现和指令的输出,通信单片机负责和HMR3000进行通信,并且将得到的ASCII字符转换成数字类型,对该数字类型进行判断和限幅,使得从HMR3000输入的信号始终符合主单片机对姿态数据的要求。
双端口RAM负责为主单片机和通信单片机提供交换数据的通道。
通信单片机将ASCII码的数据处理完后,将这些数据存放在双端口RAM中。
主单片机在需要飞行器姿态数据时,根据同样的地址访问双端口RAM中的数据区,读出需要的姿态信息[2,3]。
飞行器控制系统中的数据流向是单向的,即数据总是从传感器写入到RAM中,又从RAM中被读到主单片机中,所以不会存在同时读或同时写数据的非法状态。
双端口RAM一般可用CY7C136,DS1609等。
从数据处理的角度看,主单片机可以从数据总线上直接读取姿态数据,有效地提高了数据的可靠性,减小了系统的数据等待时间,并极大地降低了主单片机的工作量;从系统设计的角度看,只要传感器的数据刷新率快于飞行器的动态响应,双端口RAM 中的数据就是可用的反馈数据,而不必等待传感器每次传输的新数据,使控制算法的实现更加方便。
例如,选择HMR3000的数据输出为20次/s,而飞行器的动态响应一般都大于0.1s,那么在任一时刻,双端口RAM中的数据都可以用作姿态反馈数据。
3 实际应用举例图2所示的电路是设计完毕并在实际使用的模型直升机姿态测控电路。
图2 测控电路的组成Fig.2 Makeup of the measurement and control system54第9期 陈皓生等:HMR3000数字罗盘在微型飞行器中的应用 图2中从左至右分别对应的是作为参照物的圆珠笔、HMR3000数字罗盘、飞行器姿态测控电路、舵机;上方是无线数据传输系统。
HMR3000数字罗盘串口传输的输出是9600波特,输出数据的刷新率为1200句/min 。
测控系统的输出一路到舵机,另一路通过无线传输将数据发送到地面站。
实验所得的监测数据可参见图3。
图3 实验数据Fig.3 Data of experiment 图中曲线对应的是测控系统在1min 内采集到的部分数据,反映了模型直升机处于悬停状态、航向作变化时,俯仰、航向、滚转三个姿态角的变化。
4 结束语HMR3000数字罗盘的性能 体积和质量都能适应微型飞行器控制系统的要求。
但是其数据输出的接口还不够灵活。
如果在HMR3000中的单片机基础上开发控制算法和设计硬件,确实可以设计不同的数据输出方式,但是对于已经封装完毕的传感器,这样做相当于重新设计传感器的外围电路,并且有可能损害到传感器输出数据的准确度和可靠性。
提出的设计方法,能够较好地将HMR3000数字罗盘应用到微型飞行器控制系统中去,同时设计的方法也比较简单。
为微型飞行器飞行控制系统对陀螺反馈姿态数据的使用,尤其是对串行通信数据的使用,提供了一种可供参考的设计思路。
参考文献:[1] 普劳蒂R W.直升机性能及稳定性和操纵性[M ].北京:航空工业出版社,1990.410-472.[2] 马忠梅,籍顺心,何立民.单片机的C 语言应用程序设计[M ].北京:北京航空航天大学出版社,1999.57-73.[3] 窦振中.单片机外围器件实用手册存储器分册[M ].北京:北京航空航天大学出版社,1999.365-416.作者简介:陈皓生(1975-),男,安徽省合肥市人,清华大学博士研究生。
主攻方向:微型飞行器控制系统设计。
(上接第43页)凸台上。
主要优点:(1)用小量程力传感器实现了大量程测力称重,具有与小量程力传感器相同的性能参数(如准确度等);(2)有更好的抗震动碰撞性能,因而具有更好的长期稳定性,(3)对安装地面不平不敏感。
已用于矿井箕斗提升井下定量装载系统进行称重。
量程30,50t ,准确度0.3%FS ,分辨力0.01t ,长期稳定性好[2]。
8 G SJ -2型多功能电脑检测仪GS J -2多功能电脑检测仪是与双线圈自激振弦式传感器配套使用的便携式仪器,内有高增益弱激发自激激发电路单片机测量系统,由可充电电池供电,为本质安全防爆型仪器。