测量学角测量
03 测量学-角度测量
◆
两个半测回合起来称为一测回, 两个半测回合起来称为一测回, 一测回 取平均值作为最后结果:β平=(β+β′)/2。 取平均值作为最后结果: ( ) 。
方向法观测水平角的记录
水 度 平 盘 水 方 值 数 平 向 读 ° ′ ″ 0 01 18 49 50 12 229 50 18 180 01 48 水 平 角 半 回 测 值 一 回 测 值 ° ′ ″ ° ′ ″ 49 48 54 49 48 42 49 48 30
测 站
盘 位 盘 左
目 标 A B B A
备
注
O 盘 右
Δ =α -α α 左 右 =24″ Δ 容 = 30″ α
2. 方向观测法
A
B C
O
盘左位置,瞄准起始方向目标 读数 读数, 盘左位置,瞄准起始方向目标A读数,然后顺时针方向依 次瞄准目标B、C、A并读数。 并读数。 次瞄准目标 、 、 并读数 检查归零差是否超限( )。否则重测 否则重测。 检查归零差是否超限(要求≤±18″)。否则重测。 盘右位置,瞄准起始方向目标 读数 读数, 盘右位置,瞄准起始方向目标A读数,然后逆时针方向 依次瞄准目标C、 、 并读数 并读数。 依次瞄准目标 、B、A并读数。 检查归零差是否超限(要求 )。否则重测 否则重测。 检查归零差是否超限(要求≤±18″)。否则重测。
盘右位置: 盘右位置: 位置 先瞄准B目标, 先瞄准B目标,读取水平度盘读数 b 然后瞄准A目标,读取水平度盘读数a 然后瞄准A目标,读取水平度盘读数a 下半测回。 角值β′= a - b,盘右位置所测角度β称为下半测回。 角值 ,盘右位置所测角度β称为下半测回
◆限差要求
上半测回与下半测回所测角值之差不得超过40″ 上半测回与下半测回所测角值之差不得超过
测量学课件角度测量

视线水平、指标铅垂时,竖盘读数为常数:
盘左时一般 L0=90 ,盘右时一般 R0=270 。
(2)竖直角的观测与计算
盘左 270
盘右 90
180
0
0
180
90
270
• 竖直角观测
仪器对中整平后,盘左位置,十字丝横丝精确切准目标顶部。
转动竖盘水准管微动螺旋,使竖盘水准管气泡居中。
读取盘左读数 L,得上半测回竖角:L 90 L
741924 741915
741906
第2方向
K
B 测站
起始方向第一个读数应调成0或180/N(N为测回数);
分、秒数写足二位; 一测回过程中,不得再调整水准管气泡或改变度盘
位置。
三、水平角测量
1.测回法
(1)上半测回(盘左又称正镜) 左 b1 a1
(2)下半测回(盘右又称倒镜)右 b2 a2
C
A
对中、整平、瞄准、 读数
1.对中——将仪器中心安置在过测
站点的铅垂线上。对中
误差3mm。
B
垂球对中步骤:
粗略对中:移动三脚架,使垂球尖离测
站中心12cm内;
精确对中:稍微松开中心螺丝,在脚架
头上移动(不能旋转)仪器,使垂球尖精
确对中测站标志中心,旋紧中心螺丝。
光学对中步骤:对准、调平、整平、对中
(3)照准部
DJ6光学经纬仪 DJ6光学经纬仪外观图
3.2.1 DJ6光学经纬 仪 1.DJ6光学经纬
仪外观图
2. 主要轴线和几何条件
• 主要轴线 (1)望远镜视准轴CC (2)仪器横轴HH (3)照准部水准管轴LL (4)仪器竖轴VV • 几何条件 (1)LL垂直于VV (2)VV垂直于HH (3)HH垂直于CC (4)十字丝竖丝垂直于HH
测量学 3章角度
3.4竖直角测量
竖直角:同一竖面内,视线与水平线的夹角 (+、-.0-90)
天顶距: 视线与天顶方向的夹角(0-180)
水平线
仰角 +16°48'36″ 俯角 -7°05'12″
180°
270°
α
0°
90°
180°
270°
0° α
90°
L
一.竖直角测量与计算 1.盘左:瞄M点(横丝切目标顶端),读数L
三.竖盘指标自动归零补偿装置
A:盘左读数 900112 盘右读数 2695830
B:盘左读数 885236
注:竖盘注记形式 为顺时针
测 目 竖盘 竖盘读数 站 标 位置 ° ′ ″
左 90 01 12 O A 右 269 58 30
左 88 52 36 OB
180 00 21
左 右 40
1( 2
左
右)
• 2.方向法(三个或三个以上方向)
• 盘左:顺时针观测A、B、C……A 盘右:逆时针观测A……C、B、A 计算:
• 两倍照准误差 2C=盘左读数-(盘右读数±180º) • 各方向平均值=1/2[盘左读数+(盘右读数±180º) • 归零后方向值=平均值-起始方向平均值(括号内) • 各测回归零后方向平均值 • 多测回观测时,按180º/n变换水平度盘(削弱度
光
路
读数显微物镜
聚光镜
水平度盘
二.DJ2型光学经纬仪
竖直读盘 反光镜
测微轮 换像手轮
DJ2经纬仪的读数 一般采用对径重合读数法——转动测微轮,使上下
分划线精确重合后读数。
3.3 水平角观测方法
测量学方向观测法测水平角和竖直角测量
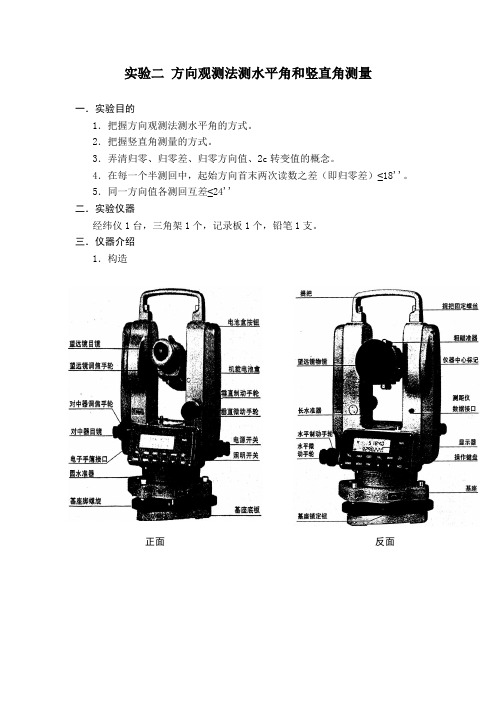
实验二方向观测法测水平角和竖直角测量一.实验目的1.把握方向观测法测水平角的方式。
2.把握竖直角测量的方式。
3.弄清归零、归零差、归零方向值、2c转变值的概念。
4.在每一个半测回中,起始方向首末两次读数之差(即归零差)≤18''。
5.同一方向值各测回互差≤24''二.实验仪器经纬仪1台,三角架1个,记录板1个,铅笔1支。
三.仪器介绍1.构造正面反面正面反面2.键盘功能与信息显示四.测量前的预备1.仪器的安置、对中与整平安置三脚架和仪器⑴选择牢固地面放置脚架之三脚,架设脚架头至适当高度,以方便观测操作。
⑵将垂球挂在三脚架的挂钩上,使脚架头尽可能水平地移动脚架位置并让垂球粗略对准地面测量中心,然后将脚尖插入地面使其稳固。
⑶检查脚架各固定螺丝固紧后,将仪器置于脚架头上并用中心联接螺丝联结固定。
利用光学对中器对中⑴调整仪器三个脚螺旋使圆水准器气泡居中。
通过对中器目镜观看,调整目镜环,使对中分划标记清楚。
⑵调整对中器的调焦手轮,直至地面测量标志中心清楚并与对中分划标记在同一成像平面内。
⑶松开脚架中心螺丝(松至仪器能移动即可),通过光学对中器观看地面标志,警惕地平移仪器(勿旋转),直到对中十字丝(或圆点)中心与地面标志中心重合。
⑷再调整脚螺旋,使圆水准器的气泡居中。
⑸再通过光学对中器,观看在面标志中心是不是与对中器中心重合,不然重复(3)和(4)操作,直至重合为止。
⑹确认仪器对中后,将中心螺丝旋紧固定好仪器。
●仪器对中后不要再碰三脚架的三个脚,以免破坏其位置。
用长水准器精准整平仪器⑴旋转仪器照准部让长水准器与任意两个脚螺旋连线平行,调整这两个脚螺旋,使长水准器气泡居中。
调整两个脚螺旋时,旋转方向应相反(如图)。
⑵将照准部转动90°,用另一脚螺旋使长水准器气泡居中。
⑶重复⑴和⑵,使长水准器在该两个位置上气泡都居中。
⑷在⑴的位置将照准部转动180°,若是气泡居中而且照准部转动至任何方向气泡都居中,那么长水准器安置正确且仪器已整平。
测量学第03章角度测量

测量学第03章角度测量
读数窗反光镜
测量学第03章角度测量
读数窗反光镜
测量学第03章角度测量
测量学第03章角度测量
二、读数设备与读数方法
112°54′30″
H
112
113
6543210
6543210
88
89
V
测量学第03章角度测量
89°04′42″
读数练习
234°21′06″
测量学第03章角度测量
照准标志:大花杆、 小花杆和觇标
测量学第03章角度测量
经纬仪的十字丝分划板
单丝
上丝
中丝
双丝
测量学第03章角度测量
下丝
瞄准
测量学第03章角度测量
瞄准
测量学第03章角度测量
瞄准
测量学第03章角度测量
瞄准
测量学第03章角度测量
第三章 角度测量
3.1 角度测量原理 3.2 经纬仪结构及其使用 3.3 角度测量方法 3.4 经纬仪检验与校正 3.5 角度测量误差分析
2 水平度盘
❖水平度盘:顺时针方向刻有0º到 360º的分划线,用来测量水平角。
❖水平度盘转动控制装置:位置变动 手轮和复测装置。
❖外轴装置:
测量学第03章角度测量
经纬仪1
照准部
基座
测量学第03章角度测量
读数显微镜 水平度盘
望远镜 上下制动螺旋
望远镜 上下微动螺旋
光学对中器
经纬仪2
竖直度盘
竖直指标水准 管微动螺旋
测量学第03章角度测量
竖盘
盘盘左右
➢ 测回法测量水平角
观测方法
A
B
O
第三章角度测量

②盘右(倒镜):β R=bR-aR ,下半测回 (B→A);
③上、下半测回合称一测回,计算一 测回平均角值:
L R
(3-3)
2
工程测量学
3 角度测量
测回法用盘左、盘右观测,可以消除仪器某些系统误差对测角的影响,校 核观测结果和提高观测成果精度。同一测回中,上、下半测回角值之差和各测回 间角值之差均不应超过相应细则、规范所规定之容许值(±40″)。否则应重测, 如各较差合乎要求,则分别取平均值。
• 掌握角度测量的基本原理; • 掌握光学经纬仪的构造及测角(水平角和竖直角)方法; • 自学经纬仪的检验校正; • 自学经纬仪测角误差分析和经纬仪测角注意事项; • 了解电子经纬仪的构造;
工程测量学
3 角度测量
§3.1 角度观测原理
一、水平角观测原理:
水平角是指地面上一点到两个目标点的方向线垂直投影到水平面上的夹角
工程测量学
3 角度测量
经纬仪系列技术参数和用途
技术项目
经纬仪等级
DJ1
DJ2
一测回水平 方向中误差
1
2
DJ6 6
望远镜有效 孔径不小于
60mm
40mm
望远镜放大 倍数不小于
30倍
28倍
水准管 水平度盘 分划值 垂直度盘
6/2mm 10/2mm
20/2mm 20/2mm
当测角精度要求较高时,往往要观测几个测回,为也减少度盘分划误差的 影响,各测回间应根据测回数n,按180°/n变换水平度盘位置。
工程测量学
3 角度测量
⑵ 方向观测法 ——当一个测站上需要测量的方向数多于两个时,应
测量学第三章 角度测量1

测水平角 用双丝夹 粗目标
测竖直角 用横丝切 目标顶部
三、读数
方法: ①打开采光反光镜,使 读数窗光线均匀; ②调焦使读数窗分划清晰 (注意消除视差); ③按不同的测微器直接 读取水平、竖直度盘 读数(度、分、秒,秒为估读且为6的倍数)。
水平角:215˚06' 48 " 竖直角: 78˚52' 00 "
一测回竖直角:
逆时针注记竖盘
刻划:目镜180° ,物镜0°
盘左: 盘右: αL= L- 90° (上半测回) αR= 270°-R(下半测回) α =(αL+αR)/2 =(L-R+180°)/2 (L、R分别为盘左、盘右竖盘读数)
一测回竖直角:
竖直角计算的通用公式:
(1)当望远镜视线往上仰,竖盘读数增加时: α=瞄准目标时的读数 - 视线水平时的常数 (2)当望远镜视线往上仰,竖盘读数减小时: α=视线水平时的常数-瞄准目标时的读数 对不同注记形式的度盘 ,首先应正确判读 视线水平时的常数,且同一仪器盘左、盘右 的常数差为180˚。
测回法观测手簿 目 水平度盘读数 半测回角值一测回角值 各测回角值 备 测站 竖盘 标 ˚ ' " ˚ ' " ˚ ' " ˚ ' " 注 表3.1
左 第一 测回 O
M 0
00
36 48
N 68 42 右 M 180 00 N 248 42 M 90 10
68 42 12 68 42 09 68 42 06 68 42 15 68 42 18 68 42 21 68 42 24
表3.2
测 站
1
方向观测法观测手簿
水平度盘读数 盘左 盘右
2c
5
角度测量学

条件:◇带刻线的度盘 ◇对中及整平装置,使度盘水平且中心 处于角顶点的铅垂线上 ◇能在水平方向和竖直方向均可转动的 照准设备,以瞄准不同方向不同高度的目标 ◇读数设备以读取度盘上的刻划
返回 上页 下页 退出
退出
§3-2 经纬仪及其使用
◆ 经纬仪的发展: 游标经纬仪(金属度盘) 光学经纬仪(光学度盘)
62 4 719
62 47 19 88 31 54 151 19 13 208 4047
A
90 01 18
270 01 12
+6
90 01 15
返回
上页
下页
退出
方向观测法测量水平角的计算
B C O
A
1、两倍照准差:2C=L-(R+180°) 2、平均读数:(L+R±180°)/2 3、归零方向值: 4、各测回归零方向平均值: 5、水平角值:
一、 DJ6 型光学经纬仪
1、经纬仪的构造:
*照准部
*水平度盘
*基 座
基座
照准部
返回 上页
度盘
下页 退出
DJ6型光学经纬仪由照准部、水平度盘和基座三大部分组成。 (一)照准部 照准部由望远镜、横轴、竖直度盘、读数显微镜、 照准部水准管和竖轴等部分组成。 (二)水平度盘部分 (1)水平度盘 顺时针方向刻有0º 到360º 的分划,用来测量水平角。 (2)水平度盘转动的控制装置 是位置变动手轮和复测装置。 (三)基座
——对十字丝分划板位置的检验与校正
1.检验
整平仪器,用十字丝竖丝照准一 清晰小点,固定照准部,转动望远镜 微动螺旋使望远镜上下微动,若小点 始终在竖丝上移动,表明条件满足,
测量学 第四章 角度测量

40
28 20―/2mm
40
20 30―/2mm
10―/2mm
二等平面控 制测量及精 密工程测量
20―/2mm
30―/2mm
三、四等平面 图根控制测量、一 控制测量、一 般工程测量 般工程测量
第二节 光学经纬仪
DJ6光学经纬仪,它主要由照准部(包括望远镜、竖直 度盘、水准器、读数设备)、水平度盘、基座三部分组成。
•
电子测角仪器仍然足采用度盘来进行测角的。与光学 测角仪器不同的是,电子测角是从度盘上取得电信号,根 据电信号再转换成角度.并自动以数字方式输出,显示在 显示器上,并记入存贮器。电子测角度盘根据取得信号的 方式不同,可分为光栅度盘测角、编码度盘测角和电栅度 盘测角等。
第四节 水平角测量
为了测得地面两点间的水平角,首先应 当把仪器安装在水平角顶,整平,然后采 用一定的观测方法进行观测。
第三节 电子经纬仪
电子经纬仪是利用光电技术测角,带有 角度数字显示和进行数据自动归算及存储 装置的经纬仪
第三节 电子经纬仪
第三节 电子经纬仪
电子经纬仪的主要特点是:
(1)采用电子测角系统,实现了测角自动化、数字化,能将 测量结果自动显示出来,减轻了劳动强度,提高了工作效 率。 (2)采用积木式结构,可与光电测距仪组合成全站型电子速 测仪,配合适当的接口,可将电子手簿记录的数据输入计 算机,实现数据处理和绘图自动化。
604906 604900
604903
βL -βR <=36
水平角观测记录(测回法)
测 目 竖盘 水平度盘读数 半测回角值 一测回角值 各测回平均角值 站 标 位置 ° ′ ″ ° ′ ″ ° ′ ″ ° ′ ″ A 1 O B 左 右 左 右 0 12 12 72 08 48 71 56 36 71 56 33 71 56 30 71 56 42 71 56 36
《测量学》第三章角度测量
换像手轮
水平读盘 反光镜
(二) 经纬仪的操作
1、光学对中
要求:3mm (1)大致水平大致对中 眼睛看着对中器,拖动三脚架两个脚,使仪器 大致对中,并保持“架头”大致水平。 (2)伸缩脚架粗平 根据气泡位置,伸缩三脚架两个脚,使圆水 准气泡居中。
B
2、整平(leveling) 要求:1格
C
H L C V
H L
L’
L’
V
一、经纬仪轴线应满足的条件
1、VV⊥LL ——照准部水准
C
管轴的检校。
2、HH⊥十字丝竖丝——十字 H
H C V L
丝竖丝的检校
3、HH⊥CC ——视准轴的检
L
校
V
L’
L’
4.HH⊥VV
——横轴
C
的检校
5.竖盘指标差应为零 — —指标差的检校 6.光学垂线与VV重合 — —光学对中器的检校 7. LL∥VV——圆水 准器的检验与校正(次 要)
水平角(horizontal
竖直角(vertical
angle)测量
angle)测量
(一)水平角(horizontal angle) 定义
水平度盘(horizontal circle)
地面一点至两目标方
向线在水平面上投影 的夹角,称为水平角。 范围:顺时针00~3600
O
a
A b
B
β=b-a
a o b
270 0
180
x
90
2、计算公式
1 (1)指标差: x ( L R 360) 2 1 或 x ( 右 左) 2
对于顺时针注记的:
正确的竖直角α=(90°+x) -L=α左+x
测量学(第四版)-第3章--角度测量

水平角— 从一点A到两个目标B,C的方向线,
垂直投影到水平面上所成的夹角,顺时针计算
b= c - a
0°< β < 360°
β也是包含 BA、BC
视线的两个铅垂面之 间的两面角。
水平度盘
oa
b
b
c
A
B
铅
铅
C垂
垂
线
线
B1
水平面
b
A1
C1
75
3
二、垂直角观测原理
2.垂直角观测原理
垂直角— 在同一铅垂面内,瞄准目标的倾斜视线
经纬仪等级 DJ2
±2
40mm
DJ6 ±6 40mm
28×
20/2mm 20/2mm
26×
30/2mm 30/2mm
主要用途
二等平面控制 测量及精密 工程测量
三、四等平面 控制测量及 一般工程测量
图根控制测量 一般工程测量 及地形测量
75
6
光学经纬仪
提要二光学经纬仪 的构造 及度盘读数
DJ6经纬仪 (6″级)
02 15 54 02 02
06 42 12 24 12
180 231 311
2 180
02 15 54 02 02
00 30 00 24 06
+6 +12 +12
0 +6
(0 02 06) 0 02 03 0 51 15 36 51 131 54 06 131 182 02 24 182 0 02 09
水平
分微尺全长分60格,
73
72
因此其最小格值为:
0 1234 56
1′= 60″
读数时,估读至0.1格
高程测量中的三角测量示意图

高程测量中的三角测量示意图Introduction高程测量是地理测量学中的一个重要分支,它涉及到测量地球表面上各个点的高度或海拔。
为了实现精确测量,三角测量是一种常用的方法。
本文将深入探讨高程测量中的三角测量示意图,并讨论其原理和应用。
三角测量的原理三角测量是一种基于三角形性质的测量方法,通过测量边长和角度来计算未知点的位置和高程。
在高程测量中,我们关注的是点的高度,即垂直距离。
三角测量的原理可以简单概括为以下几个步骤:1. 构建三角形:首先选择一个基准点,确定一个基线和两个观测点,形成一个三角形。
2. 观测角度:使用测量仪器测量观测点到基准点的角度,通常使用全站仪等测量仪器。
3. 测量边长:使用测距仪或其他测量工具测量三角形的边长。
4. 计算高程:通过测量的角度和边长,使用三角函数计算出待测点的高程。
三角测量在高程测量中的应用三角测量在高程测量中有广泛的应用,下面将介绍其中几种常见的应用。
1. 地形测量:通过三角测量可以绘制地形图,用于农业、城市规划、环境保护等领域的研究和规划。
2. 工程测量:在建筑和土木工程中,三角测量可以用于确定建筑物或道路的高程,以确保工程施工的准确性。
3. 水文测量:三角测量可以用于测算河流的坡度和高程变化,帮助研究水文学和水资源管理。
4. 遥感测量:通过航空或卫星遥感技术,结合三角测量原理,可以获取大范围地表高程数据,为数字地球模型和环境监测提供支持。
5. 导航定位:利用三角测量可以确定船舶或飞机在海上或空中的位置和高度,为导航和空中交通管理提供重要数据。
结论三角测量在高程测量中起着重要作用,它以测量角度和边长为基础,计算出未知点的高程。
通过构建三角形和运用三角函数,可以在实际应用中获得准确的高程数据。
高程测量的广泛应用领域使三角测量示意图成为地理测量学中不可或缺的工具。
测量学 第3章 角度测量

(1)目标
花杆
测钎
水准尺
觇标
3.2 经纬仪的构造与使用
(2)经纬仪十字丝
瞄准
3.2 经纬仪的构造与使用
(3)瞄准方法
瞄准
3.2 经纬仪的构造与使用
瞄准
3.3 水平角测量
测回法测量水平角
盘 左 : 望观 远测 镜目 的镜 左时 边, 。竖 盘 在
盘 右 : 观望 测远 目镜 镜的 时右 ,边 竖。 盘 在
H
234
0123456
0123456
273
272
V
3.2 经纬仪的构造与使用
H 116
115 115°58′24″
01 23456
0123456
79
78
V
79°04′18″
3.2 经纬仪的构造与使用
经纬仪的使用
对中 整平 瞄准
——使仪器的中心与测站点的标志 中心在同一铅垂线上
——使仪器的竖轴垂直,即水平度 盘处于水平位置
盘右
180 01 12 251 52 00 325 30 48 30 12 06 180 01 18 270 01 18 341 52 00 55 30 48 120 12 18 270 01 24
平均读数
归零方向值 归零平均值
0 01 09 71 52 03 145 30 48 210 12 09 0 01 21 90 01 21 161 52 03 235 30 51 300 12 21 90 01 30
0 00 00 71 50 48 145 29 33 210 10 54
A 0 01 06
O左
B
85 35 12 85 36 18
(1 )右
测量学试题及答案第三章角度测量
第三章角度测量一、名词解释水平角竖直角竖盘指标差二、填空题1.经纬仪主要由、与三部分组成。
2.J6级光学经纬仪采用得测微装置一般有两种类型,其一为分微尺测微器,其二为单平板玻璃测微器。
3.经纬仪得安置包括与两项工作。
4.对中得目得就是使仪器中心通过地面点即所测角顶得铅垂线上。
5.整平得目得就是水平度盘处于水平位置。
6.光学经纬仪得对中方法一般有两种,一种就是用对中,另一种就是用对中。
7.经纬仪测水平角时,根据观测方向数量得不同,测角方法有法与法。
8.经纬仪观测角度时,竖盘有两个盘位,一个就是,一个就是9.光学经纬仪得竖盘如果就是顺时针刻划,其盘左竖直角计算公式为,盘右竖直角计算公式为,竖盘指标差得计算公式为。
10.经纬仪得轴线有轴、轴、轴、轴,其轴线之间应满足得关系为、、、与竖盘指标差为零。
11.经纬仪角度测量误差来源于、与三个方面。
12.观测误差一般包括误差、误差、误差、误差与误差。
13.测回法一测回测水平角得限差要求有。
14.方向观测法中(J2仪器)得限差要求有、、三项。
三、读数题2.读出下列经纬仪读数窗得读数( H ) ( H )( V )( V )( )( )( )( )四、计算题1、完成表中得测回法观测水平角记录水平角读数观测记录(测回法)测站盘位目标水平度盘读数半测回角值一测回角值备注°′″°′″°′″O 左A0 0112B196 1612右A180 01竖直角读数观测记录(测回法)五、简答题简述经纬仪得轴线有哪些,以及各轴线之间应满足得关系。
第三章一,1水平角;就是指地面上一点到两个目标点得方向线垂直投影到水平面上得夹角,或者就是两条方向线得竖直面所夹得两面角,其范围在0°~360°、 2,竖直角;在同一竖直面内,某一方向线玉水平线得夹角、 3, 竖盘指标差;当视线水平,竖盘指标水准管气泡居中时,竖盘指标不指向正确位置,而就是与正确得读数有一定得偏差值x,称为指标差。
矿山测量学-- 第三章 角度测量

12
§3.4
水平角和竖直角测量方法
3.4.1 水平角测量
水平角测量有测回法和方向观测法两种 ⑴ 测回法——常用于测量两个方向之间的单角。图3-14。 ①盘左(正镜)、βL=bL-aL 、上 半测回(A→B)
②盘右(倒镜)、βR=bR-aR 、下 半测回(B→A)
③上、下半测回合称一测回, 计算一测回平均角值。
((33--1100))
将各观测数据填入竖直角观测手簿(表3-3),利用上列各式逐 项计算,得出一测回竖直角。
低处目标的观测、计算方法与此相同。
21
§3.4
水平角和竖直角测量方法
3.4.2 竖直角测量
δ=1/2(R+L-360)
竖直角观测手簿
测 目 竖盘 竖盘读数 半测回
站 标 位置
竖直角
P左 O右
水平角是指地面上一点到两个目标点的方向线垂直投影到水平
面上的夹角,或者是过两条方向线的竖直面所夹的两面角。如图3-
1所示。
在过A点的铅垂线上,水平地安置
一个有刻度的圆盘(称为水平度盘),度
盘中心在o点,过AB、AC竖直面与水平
度盘交线为on、om,在水平度盘上读数
为n、m。则∠nom为所测得的水平角。
92°+d
10
§3.3
DJ6型光学经纬仪读数装置和操作使用
3.3.3 经纬仪的使用
经纬仪的使用包括对中、整平、瞄准、读数四个步骤
⑴ 对中——对中的目的是使仪器的中心与测站点位于同一铅 垂线上。对中可用垂球或光学对点器对中。垂球对中精度一般在 3mm之内,光学对点器对中可达1mm。
⑵ 整平——整平的目的是使仪器竖轴在铅直位置,而水平度 盘在水平位置。图3-12。
测量学角度测量实习报告
一、实习背景角度测量是工程测量学中的一项基本技能,也是土木工程、水利工程、地质勘探等领域不可或缺的技术。
本次实习旨在通过实际操作,使学生掌握角度测量的基本原理、方法和技巧,提高学生的实际操作能力和对测量数据的分析处理能力。
二、实习目的1. 巩固和深化课堂所学角度测量的理论知识;2. 熟练掌握角度测量的仪器操作;3. 提高学生独立完成角度测量任务的能力;4. 培养学生的团队协作精神。
三、实习内容1. 角度测量的基本原理和仪器操作;2. 角度测量的误差分析和数据处理;3. 角度测量的实际操作训练。
四、实习过程1. 实习前准备(1)熟悉实习场地,了解实习任务和要求;(2)复习角度测量的理论知识,掌握角度测量的基本原理和方法;(3)检查实习仪器,确保仪器性能良好。
2. 实习过程(1)角度测量的基本原理和仪器操作① 角度测量的基本原理:角度测量是利用测角仪器直接或间接测量两个观测目标之间的夹角。
角度测量通常分为水平角测量和垂直角测量。
② 角度测量的仪器操作:实习中主要使用经纬仪进行角度测量。
经纬仪主要由望远镜、水平管、垂直管、读数显微镜、水平制动螺旋、垂直制动螺旋、望远镜制动螺旋、照准器等部件组成。
(2)角度测量的误差分析和数据处理① 角度测量的误差分析:角度测量误差主要来源于仪器误差、观测误差和外界因素影响。
② 角度测量的数据处理:通过对观测数据进行平差处理,消除误差,提高测量精度。
(3)角度测量的实际操作训练① 观测目标的选取:选取两个观测目标,确保目标间视线清晰。
② 观测数据的采集:按照操作规程,使用经纬仪进行角度测量,记录观测数据。
③ 观测数据的处理:对观测数据进行平差处理,计算最终测量结果。
3. 实习总结(1)总结实习过程中遇到的问题及解决方法;(2)对实习内容进行归纳总结,提高自身实际操作能力;(3)撰写实习报告。
五、实习成果1. 学生掌握了角度测量的基本原理和仪器操作;2. 学生具备独立完成角度测量任务的能力;3. 学生提高了团队协作精神。
测量学—水平角测量的误差
水平角测量误差的主要来源有
仪器误差 观测误差 外界条件的影响
一、仪器误差
1.视准轴误差
采用盘左、盘右观测取平均值的方法,可以消 除此项误差的影响。
2.横轴误差
采用盘左、盘右观测取平均值的方法,可以消 除此项误差的影响。
3.水平度盘的偏心差
采用盘左、盘右观测取平均值的方法,可以消 除此项误差的影响。
1 2
β
O θ eβ′
O′
B D2
δ2
1
e sin
D1
2
e
sin(
D2
)
1
2
e
sin
D1
sin( )
D21ຫໍສະໝຸດ 2esin
D 1
sin( )
D 2
对中误差对水平角的影响有以下特点:
(1)△β与偏心距e成正比;
(2)△β与测站点到目标的距离D成反比;
(3)△β与水平角β′和偏心角θ的大小有关, 当β′=180˚,θ=90˚时,△β最大。
4.水平度盘刻划不均匀误差
采用在各测回间变换水平度盘位置观测,取各 测回平均值的方法,可以减弱由此给测角带来的影 响。
5. 竖轴误差
仪器竖轴倾斜引起的误差无法采用一定的观测 方法加以消除。因此,在经纬仪使用之前应严格检 校仪器竖轴仪器竖与水准管轴的垂直关系。
二、观测误差
1.对中误差
A D1 δ1
2.目标偏心误差
目标偏心误差是由于观测标志倾斜或没有立在目标点
中心的原因,而产生的误差。
A′
e Lsin
e Lsin
D
D
α
L
目标偏心误差对
水平角观测的影响与