bkut%arm商业资料2011年政法英杰系统精讲曹兴明知识产权讲义
民用航空器维修执照考试:导航系统考点(强化练习)

民用航空器维修执照考试:导航系统考点(强化练习)1、单选在使用RMP(无线电管理面板)调谐ILS/DME时,其DME信息将显示在?()A、PFD上B、备用仪表盘上C、两者都可以显示正确答案:A2、单选在执行快速(江南博哥)校准时,需在()秒以内重新设定三个ADIRS选择器到导航位(NAV)?()A、3秒B、5秒C、8秒正确答案:B3、单选ADIRU1(第一部大气数据惯性基准组件)由哪个探头提供信号?()A、机长探头B、副驾驶探头C、备用探头D、备用探头及机长全温探头正确答案:A4、单选当听到“TRAFFIC TRAFFIC”时,入侵飞机对本航空器()?A、有潜在的碰撞威胁B、有真正的碰撞威胁正确答案:A5、单选惯导故障对起落架的影响是:()A、最大起落架速度由ADR探测到的表速决定,惯导故障则受控安全活门关闭,故不能正常放轮B、起落架相关数据由FMGC计算决定,惯导故障则不影响起落架的正常收放正确答案:A6、单选当飞机与前方地形发生冲突,此时TERRONND的按钮处于关位,ND上能不能显示地形?()A、能B、不能正确答案:A7、单选在正常情况下ADIRU(大气数据惯性基准组件)提供的是:()A、真航向B、磁航向正确答案:B8、单选云上绕飞雷暴云需在其上方5000英尺以上的高度通过,雷达观测前方雷暴顶部高度在25000英尺以上,能不能从其上方通过?()A、可以B、不可以正确答案:B9、单选要避开大风暴,机组必须在离天气现象()以外做出决定?A、20海里B、40海里C、80海里正确答案:B10、单选起飞滑跑100海里/小时以前,系统探测到前方5海里有风切变,ND 上()获得风切变图像,同时PFD上()显示W/SAHEAD字样A、能,能B、能,不能C、不能,能正确答案:B11、单选正常工作时GPS接收机向ADIRU提供数据信息,ADIRU1由下列哪个GPS接收机提供信号?()A、GPS1B、GPS2正确答案:A12、单选TCAS(交通警报和防撞系统)的探测能力范围是多少?()A、30-40海里B、50-60海里C、70-80海里正确答案:A13、单选ADIRU2(第二部大气数据惯性基准组件)由哪个探头提供信号?()A、机长探头B、副驾驶探头C、备用探头D、备用探头及机长全温探头正确答案:B14、单选落地后,飞行员应该在飞机停稳后在ND上检查剩余地速,当发现剩余地速大于()海里时应报告机务(连续两次飞行漂移过大,认为IR失效)A、10B、15C、20正确答案:B15、单选FMGS可以存储最多()个导航台?A、10B、15C、20正确答案:C16、单选计划的下降中,高度15000英尺以下每5000英尺将雷达天线向上增加()使导航显示器ND相对的不受地面回波干扰?A、0.5°B、1°C、1.5°正确答案:B17、单选IR(惯性基准)可以提供下列哪项参数?()A、空速B、迎角C、地速D、温度正确答案:C18、单选▲▲\\()表示:()A、270度/120海里B、270度/110海里C、90度/120海里D、90度/110海里正确答案:A19、单选ILS进近飞机在无线电高度1000英尺以上低于下滑道2个点,此时会不会触发GLIDE SLOPE?()A、会B、不会正确答案:B20、单选正常工作时GPS接收机向ADIRU提供数据信息,GPS接收机1向哪个提供信号?()A、ADIRU1+ADIRU2B、ADIRU1+ADIRU3C、ADIRU2+ADIRU3正确答案:B21、单选飞机停在地面处于停止状态的时候可以执行校准,当原地启动发动机,停留刹车刹住时,能不能执行校准?()A、能B、不能正确答案:B22、判断题在双FMGC失效的情况下,RMP(无线电管理面板)1和2可以提供导航设备的备用调谐。
2011年各大学录取分数Microsoft Word 文档 (4)
辽宁省2011年文史类第一批本科A段院校最低录取分数2011-7-17 19:01:40 浏览人数:4426院校代号院校名称最低录取分数0002安徽大学5510040北京大学6290042北京第二外国语学院5880052北京工业大学5460055北京航空航天大学5900058北京化工大学5560064北京交通大学5950072北京科技大学5830078北京理工大学5650081北京林业大学5600087北京师范大学6090091北京体育大学5640092北京外国语大学6010099北京邮电大学5530102北京语言大学5890114长安大学5520178重庆大学5670207大连海事大学5790213大连理工大学5640233电子科技大学5440237东北财经大学5730240东北大学5680245东北林业大学5500248东北师范大学5720249东北师范大学*5530256东南大学5730259对外经济贸易大学608 0267福州大学5570273复旦大学6200340哈尔滨工程大学546 0343哈尔滨工业大学567 0345哈尔滨工业大学(威海)551 0379合肥工业大学5370418河海大学5700504湖南大学5650532湖南师范大学5430546华北电力大学(保定)537 0547华北电力大学(北京)544 0553华东理工大学558 0554华东师范大学592 0555华东政法大学580 0557华南理工大学560 0559华南师范大学546 0564华中农业大学550 0581吉林大学5780617暨南大学5750624江苏大学5580721兰州大学5610742辽宁大学5540819内蒙古大学5350841南方医科大学550 0848南京大学6020853南京航空航天大学563 0856南京理工大学552 0860南京农业大学547 0864南京师范大学552 0871南京信息工程大学544 0877南开大学5980927清华大学6250950山东大学5890951山东大学威海分校572 1020陕西师范大学554 1026上海财经大学606 1028上海大学5751034上海对外贸易学院566 1048上海交通大学629 1060上海外国语大学594 1076深圳大学5511130首都经济贸易大学569 1137四川大学5831162苏州大学5631198天津大学5911263武汉大学5951275武汉理工大学549 1305西安建筑科技大学542 1307西安交通大学5571327西北大学5561328西北工业大学5491331西北农林科技大学547 1340西南财经大学5831342西南大学5501346西南交通大学5481352西南政法大学5621356厦门大学6011426云南大学5471454浙江大学6071468郑州大学5471479中国传媒大学5891481中国地质大学(北京)551 1483中国地质大学(武汉)551 1486中国海洋大学5741492中国矿业大学5431497中国民用航空飞行学院546 1498中国农业大学5791499中国农业大学*5551501中国人民大学6171505中国石油大学(北京)559 1506中国石油大学(华东)5531510中国药科大学564 1514中国政法大学599 1516中南财经政法大学576 1518中南大学5651521中山大学5951522中央财经大学606 1526中央民族大学587辽宁2009年第一批本科A段院校文史类最低录取分数线[声明]本专区是中国高中生网特为网友提供的信息存储空间,该文(作品)系网友156145314081上传,来源:辽宁招生考试之窗,作者:。
滇藏铁路沿线重要活动断裂带晚第四纪活动性初步研究

张献兵,于皓,余潇,等. 滇藏铁路沿线重要活动断裂带晚第四纪活动性初步研究[J]. 地震科学进展, 2024, 54(1): 94-109.doi:10.19987/j.dzkxjz.2023-147Zhang X B, Yu H, Yu X, et al. Preliminary study on the Late Quaternary activity of important active fault zones along the Yunnan-Tibet railway[J]. Progress in Earthquake Sciences, 2024, 54(1): 94-109. doi:10.19987/j.dzkxjz.2023-147综述与评述滇藏铁路沿线重要活动断裂带晚第四纪活动性初步研究张献兵1, 2, 3) 于 皓1, 2, 3) 余 潇1, 2, 5) 郭长宝1, 2, 4)吴瑞安1, 2, 4) 王 炀1, 2, 4) 钟 宁1, 2, 4)※1) 中国地质科学院地质力学研究所,北京 1000812) 自然资源部活动构造与地质安全重点实验室,北京 1000813) 中国地质大学(北京)地球科学与资源学院,北京 1000834) 中国地质调查局新构造与地壳稳定性研究中心,北京 1000815) 中国地质大学(武汉)地球科学学院,湖北武汉 430074摘要 滇藏铁路位于青藏高原东南缘板块碰撞和构造活跃的地形急变带,沿线活动断裂发育,地震频发,地震烈度强,且地质灾害频繁,其规划施工建设和长期运营面临的地质安全风险问题严峻。
滇藏铁路香格里拉—波密段沿线发育了哈巴—玉龙雪山东麓断裂带、中甸—龙蟠断裂带、德钦—中甸—大具断裂带、维西—乔后断裂带、金沙江断裂带、巴塘断裂带、澜沧江断裂带、怒江断裂带、边坝—洛隆断裂带、嘉黎—察隅断裂带等10余条活动断裂带。
受断裂黏滑位错、蠕滑变形和引发强震风险的突出影响,迫切需要厘定区域活动断裂带的几何展布和活动性。
移动煤矿样品摘取机器人Yuanfang Li等人的动态特性分析:悬挂臂的动态特性对移动煤矿样品摘取机

Dynamic Characteristics Analysis of the Hydraulic Arm ofMobile Coal Sampling RobotYuanfang Li1, Haibo Xu1, Jun Wang2, Rong Deng1 and Yufeng Lin11Xi'an Jiaotong University, Xi’an 710049, Shanxi, China2Xi'an Hongyu mining special mobile equipment Co., Xi’an 710075, Shaanxi, China Abstract—Dynamic characteristics of the hydraulic armaffects the mobile coal sampling robot’s accuracy and efficiency.The complex and varied working conditions put many highrequirements on the stability of the hydraulic arm. This papertook the hydraulic arm of the MCYY2000 mobile coal samplingrobot as the research object, and established a simplified modelof the hydraulic arm with SolidWorks. It carried out the analysisunder both the condition of no-sampling resistance and thecondition of variable sampling resistance. The analysis was donewith the module of multi-body dynamics simulation in Simulink.This paper helps to obtain the joint torques and hydraulicdriving forces of the hydraulic arm under different conditions. The results provide a basis for further work including accurate motion control, chatter reduction and safety improvement of the coal sampling robot.Keywords—coal sampling robot; hydraulic arm; complex working conditions; dynamic characteristicsI.I NTRODUCTIONThe mobile coal sampling robot is suitable for the sampling of carts, trains and coal heaps in places such as coal yards, steel mills, power plants, and harbors[1]. With its advantages of small size, high mobility, and wide adaptability, it has demonstrated an important position in the industry of mechanized coal sampling in recent years. Compared to manual sampling, the mobile coal sampling robot can reduce labor intensity and increase sampling efficiency[2].The MCYY2000 mobile coal sampling robot developed by Xi'an Hongyu Mining Special Mobile Equipment Co., Ltd. has the advantages of convenient movement, simple operation, and various control modes (manual, semi-automatic, and automatic), and can realize the integration of full-section sampling, crushing, shrinking, and collection. With high sampling efficiency, the sampling robot overcomes the disadvantages of low accuracy, low efficiency, and poor flexibility in the current manual sampling and mechanical sampling processes. As respectively shown by No.1-7 in Figure I, the whole structure of the sampling robot is mainly composed of the car chassis, the disposal storage device, the sample preparation device, the hydraulic arm, the hydraulic system, the driving room and the electrical system.FIGURE I. STRUCTURE OF THE MOBILE COAL SAMPLING ROBOT The hydraulic arm is the most important part of the mobile coal sampling robot. Its dynamic characteristics affects the sampling accuracy and sampling efficiency. Therefore, the dynamic characteristics of the hydraulic arm are important targets for the analysis and research of the coal sampling robot[3][4][5]. This paper takes the hydraulic arm of the MCYY2000 mobile coal sampling robot as the research object, establishes a simplified model of the hydraulic arm of the coal sampling robot in the SolidWorks, and carries out the analysis of no-sampling resistance and variable sampling resistance of the hydraulic arm through the multi-body dynamics simulation module of Simulink. The dynamic simulation analysis under the two working conditions helps to obtain joint torques and hydraulic driving forces. The analysis is used to provide the basis for follow-up accurate motion control, reducing flutter, and improved work accuracy and safety.II.I NTRODUCTION OF THE H YDRAULIC A RM ANDW ORKING C ONDITION A NALYSISAs respectively shown by No.1-11 in Figure II, the hydraulic arm of the mobile coal sampling robot is composed the base, the upper arm, the second arm, the telescopic arm, the mast, the sampling head, the upper arm cylinder, the second arm cylinder, the telescopic arm cylinder, the guide cylinder and the swing hydraulic motor. The base is connected with the slewing bearing, and the hydraulic motor provides power. The base drives the entire hydraulic arm to realize a 300° rotation. The upper arm, second arm and telescopic arm are driven by their respective hydraulic cylinders to achieve the motion of pitching and telescoping. The sampling cylinder is fixed in the mast, and the directly reciprocating motion of the sampling head guide rail is driven by moving the pulley block and the chain. This motion controls the vertical down sampling and the oblique down sampling at different angles. The mast makes it possible to keep the upper arm and the second arm stationary3rd International Conference on Electrical, Automation and Mechanical Engineering (EAME 2018)during sampling, so the sampling accuracy can be higher. The sampling head is a spiral structure[6] and can complete the deep sampling into coal heaps with a depth of 2 meters.FIGURE II. STRUCTURE OF THE HYDRAULIC ARM The related size parameters of the hydraulic arm of the coal sampling robot are shown in Table I. The parameters in the table are all from the actual design parameters of the MCYY2000 mobile coal sampling robot.TABLE I. RELATED SIZES OF THE HYDRAULIC ARMComponent Size / mmupper arm 2900second arm 2700telescopic arm 1000mast 3400Sampling head 2100Complex and varied working conditions[7] of coal sampling projects put many high requirements on the stability of the dynamic characteristics of the hydraulic arm:(1) When the sampling head of the hydraulic arm is moving at a low speed and operating the pitching movement with no-sampling resistance, the torque of each joint and the driving force of the hydraulic cylinder should be changed smoothly with small amplitude, so that the hydraulic arm can maintain safety and stability during its adjustment of the sampling angle.(2) When the hydraulic arm is sampling at a fixed sampling angle, the sampling head is subject to a varying sampling resistance. At this time, the joint torques and the hydraulic driving forces must avoid sharp changes or exceeding its safety range[8] so that the coal sampling robot can stay safe. The key research of this paper focuses on the dynamic characteristics of the hydraulic arm of the coal sampling robot under the two working conditions.III.A NALYSIS OF D YNAMIC C HARACTERISTICS OF THEH YDRAULIC A RMTo build a virtual prototype, simplified models should be used as much as possible. In order to reduce the simulation time[9], the number of parts should be reduced as much as possible while satisfying the integrity of the virtual prototyping simulation movement. According to the actual size of the hydraulic arm and the types of hydraulic cylinders, the components including the base, the upper arm, the second arm, the telescopic arm, the mast, the sampling head and hydraulic cylinders are modeled and assembled in SolidWorks. The virtual prototype of the hydraulic arm of the coal sampling robot is shown in Figure III.FIGURE III. VIRTUAL PROTOTYPE MODEL OF THE HYDRAULICARMAs shown by No.1-8 in Figure IV. the simplified schematic diagram of the movement mechanism includes three joints - join1, joint2 and joint3 - and five hydraulic cylinders - cylinder1, cylinder2, cylinder3, cylinder4 and cylinder5. The range of the motion of each joint variable and cylinder driving variable is shown in Table II.FIGURE IV. MOTION MECHANISM OF THE HYDRAULIC ARM OFTHE COAL SAMPLING ROBOTTABLE II. RANGE OF JOINT ANGLES AND CYLINDER LENGTHS Joint angle Range /(°) Cylinder length Range / mmjoint θ1 66-130 cylinders1 1750-2750 joint θ2 90-160cylinder s2 1450-2300cylinder s3 2700-3700 joint θ3 60-135cylinder s4 1650-2650cylinder s5 3400-5500Import the assembled model into Simulink and generate a block diagram of the model. Set the appropriate material properties and apply the necessary constraints[10] for each component in the model, and add torque sensors and force sensors for the rotating joints and hydraulic cylinders. The signal window modules are also added. The general Simulink dynamic analysis block diagram after settings is shown in Figure V. The multibody structure diagram of the hydraulic arm is shown in Figure VI.FIGURE V. GENERAL SIMULINK DYNAMIC ANALYSIS BLOCKDIAGRAMFIGURE VI. SIMSCAPE MULTIBODY STRUCTURE DIAGRAM A.Analysis of the Dynamic Characteristics of the HydraulicArm of Coal Sampling Robot under the Condition of No-sampling ResistanceWhen the hydraulic arm is under the no-sampling resistance condition, the sampling head only performs low-speed pitching movements. At this time, each joint torque and the hydraulic cylinder driving force should be stable and be of small-scale changes, so that the coal sampling robot can remain safe and stable during the adjustment of its sampling angle. When analyzing the dynamic characteristics of the hydraulic arm under this condition, the sampling resistance is set to zero. The curve of the length of the hydraulic cylinder s4 is shown in Figure VII. The lengths of cylinders s1, s2, s3 and s5 are respectively set to 2250mm, 1950mm, 2700mm and 3400mm. According to the relationship between the joint variables and the cylinder driving variables, the curve of the joint angle θ3 is shown in Figure VIII.FIGURE VII. CURVE OF THE LENGTH OF CYLINDER 4FIGURE VIII. CURVE OF JOINT ANGLE θ3The curves of the joint torques and the hydraulic cylinder driving forces are respectively shown in Figure IX and Figure X. With the extension and retraction of the mast cylinder s4, the torques of the joint1-joint3 firstly increase and then decrease within a smaller range, and the change trend is relatively stable. The torque of joint1 is the largest. The torque of joint2 is the next, and the torque of joint3 is the smallest. The driving forces of the hydraulic cylinders also change smoothly. The driving force of the hydraulic cylinder1 is the largest, and the driving force of the hydraulic cylinder3 remains basically unchanged.The results show that when the hydraulic arm of the coal sampling robot performs low-speed swing movement of its sampling head under the condition of no-sampling resistance, the joint torques and the driving forces of the hydraulic cylinders change smoothly and slightly. The driving forces of the hydraulic cylinders mainly overcome the effect of gravity. The simulation results are in accordance with the actual situation.FIGURE IX. CURVES OF JOINT TORQUESFIGURE X. CURVES OF CYLINDER DRIVING FORCESB.Analysis of the Dynamic Characteristics of the HydraulicArm of Coal Sampling Robot under the Condition ofVariable ResistanceIn the sampling process, the sampling head of the coal sampling robot is mainly subjected to three external loads including the insertion resistance, the gravity of coal and the lifting resistance. The insertion resistance and the ascending resistance are uncertain under different working conditions. According to formulas and relevant experiences, the insertion resistance and the ascending resistance are respectively set to 6000 N and 5000 N. The designing parameters of the coal sampling robot show that the coal sampling weight is about 200N, which is much smaller compared with the other two resistances. Therefore, the curve of the sampling resistance during vertical sampling process is shown in Figure XI. According to this, the dynamic characteristics of the hydraulic arm of the coal sampling robot under the variable resistance condition can be verified.FIGURE XI. CURVE OF THE SAMPLING RESISTANCEFIGURE XII. CURVE OF THE LENGTH OF CYLINDER 5 When analyzing the dynamic characteristics of the hydraulic arm under the variable resistance condition, the joint angles θ1 and θ2 respectively maintain 70° and 110°. The joint angle θ3 is set to 90°, which means the sampling head performs vertical sampling at a sampling angle of 90°. Curve of the length of Hydraulic cylinder 5 is shown in Figure XII.As shown in Figure XIII and Figure XIV when the sampling resistance is given, the curves of the joint torques and the driving forces of the hydraulic cylinders are no longer smooth. Instead, they show sharp turning changes with the changes of the sampling resistance. The joint 1 and the joint 2 show large torques and relatively large variation. The joint 3 shows relatively small torque. The driving forces of the hydraulic cylinder 1 and the hydraulic cylinder 2 are relatively large and the amplitude of their changes is also large. The driving forces of the hydraulic cylinder 4 and the hydraulic cylinder 5 change within a little range and are relatively stable. The hydraulic cylinder 3 basically has no change of driving force under this condition.The results show that the joint torques and the driving forces of the hydraulic cylinders have turning changes under the condition of variable resistance. Due to the low moving speed of the sampling head, the influence of inertial force and inertia torque is relatively small[11]. The driving forces of the hydraulic cylinders mainly overcome the gravity of the arm itself and the external sampling resistance. The simulation results are in accordance with the actual situation.FIGURE XIII. CURVES OF JOINT TORQUESFIGURE XIV. CURVES OF CYLINDER DRIVING FORCESIV.C ONCLUSIONSThis paper took the hydraulic arm of the MCYY2000 mobile coal sampling robot as the researching object. It established a simplified model of the hydraulic arm with SolidWorks, and carried out the dynamic simulation analysis of the hydraulic arm under both the condition of no-sampling resistance and the condition of variable resistance with the Simulink. The simulation results are basically in accordance with the actual situation.(1) Under the condition of no-sampling resistance, the hydraulic arm of the coal sampling robot performs low-speed swing movement of the sampling head. The joint torques and the driving forces of the hydraulic cylinders change smoothly and slightly. The driving forces of the hydraulic cylinders mainly overcome the effect of gravity.(2) Under the condition of variable resistance, the joint torques and the driving forces of the hydraulic cylinders show turning changes. Due to the low moving speed of the sampling head, the influence of inertial force and inertial torque are relatively small. The driving forces of the hydraulic cylinders mainly overcome the gravity of the arm itself and the external sampling resistance.In this paper, the joint torques and hydraulic driving forces of the hydraulic arm are obtained through dynamic simulation analysis. The results help to provide a basis for further work including accurate motion control, chatter reduction and safety improvement of the coal sampling robot.A CKNOWLEDGMENTThanks to the support of Xi'an Hongyu Mining Special Mobile Equipment Co., Ltd. And thanks to the help of Shaanxi Science & Technology Co-ordination & Innovation Project.R EFERENCES[1]Yang Jinhe and Liu Enqing. Discussion on mechanized sampling ofcommercial coal [J]. Coal Processing & Comprehensive Utilization, 2007(04): 29-30.[2]Sun Gang. Research on Performance Index of Coal Sampling Machine[J].Journal of China Coal Society, 2009, 34(06): 836-839.[3]Qu Can. Virtual Design of Sampling Arm for Vehicle Coal samplingrobot [D]. Xi'an: Chang’an University, 2014.[4]Lu Na. Dynamic Analysis of Sampling Arm of Coal Sampling MachineBased on ANSYS [D]. Xi'an: Chang’an University, 2014.[5]Li Longlong. Inverse Kinematics Analysis and Sampling TrajectoryControl Simulation of Coal Sampling Arm [D]. Xi'an: Xi’an University of Architecture and Technology, 2014.[6]Li Xuta, He Lile, Zhang Youzhen and Leng Mingyou. Analysis of SpiralDrill Pipe Fatigue Strength of Spiral Coal Sampling Device [J]. Coal Engineering, 2012(11): 93-94+98.[7]Zhu Xiaoyong and Zhang Yuangen. Common problems in coal samplingand its solution [J]. Modern Industrial Economy and Informationization, 2017, 7(16): 72-74.[8]Chen Chuanxiong and Kong Jian. Optimization Design and Analysis ofCoal Sampling Robot Transmission System [J]. Coal Technology, 2016,(02): 259-262.[9]Geng Chunxia and Ye Feng. Research on the Optimized Design ofSampling Arm of Coal Sampling Machine [J]. Coal Technology, 2013,(12): 14-16.[10]SUN Xuguo, HUANG Sunzhuo, LIN Shuwen, et al. Modeling andsimulation of excavator mechanism dynamics based on Matlab[J].Mechanical Engineer, 2007(9): 91-93.[11]Zheng Deshuai, Gu Lichen, Zhang Ping and Jia Yongfeng. AMESimmodeling and feasibility analysis of a new coal sampling arm [J].Machine Tool & Hydraulics, 2013, 41(13): 155-157.。
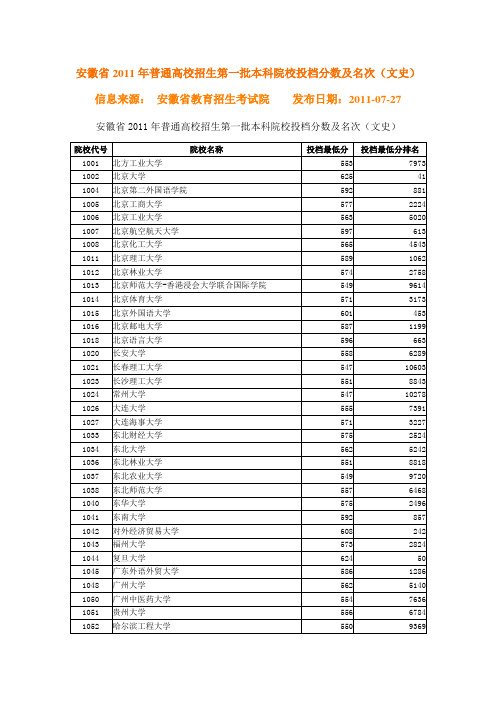
安徽省2011年普通高校招生第一批本科院校投档分数及名次
宁夏大学
547
10686
1115
青岛大学
570
3318
1118
青海大学
548
10160
1119
清华大学
635
11
1121
山东大学
593
808
1122
山东大学威海分校
576
2317
1123
山东科技大学
565
4529
1124
山西财经大学
551
8888
1127
陕西师范大学
554
7491
1128
汕头大学
547
10699
1235
安徽师范大学
548
9866
3173
1015
北京外国语大学
601
453
1016
北京邮电大学
587
1199
1018
北京语言大学
596
663
1020
长安大学
558
6289
1021
长春理工大学
547
10603
1023
长沙理工大学
551
8843
1024
常州大学
547
10278
1026
大连大学
555
7391
1027
大连海事大学
571
3227
624
50
1045
广东外语外贸大学
586
1286
1048
广州大学
562
5140
1050
广州中医药大学
554
7636
1051
贵州大学
556
2011年本科院校录取最低分数线
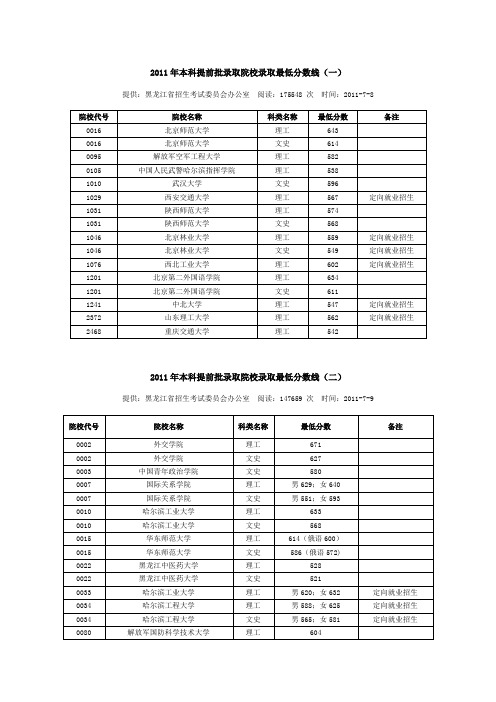
2011年本科提前批录取院校录取最低分数线(一)提供:黑龙江省招生考试委员会办公室阅读:175548 次时间:2011-7-82011年本科提前批录取院校录取最低分数线(二)提供:黑龙江省招生考试委员会办公室阅读:147659 次时间:2011-7-92011年本科提前批录取院校录取最低分数线(三)提供:黑龙江省招生考试委员会办公室阅读:112073 次时间:2011-7-102011年本科提前批录取院校录取最低分数线(四)提供:黑龙江省招生考试委员会办公室阅读:33290 次时间:2011-7-112011年本科提前批录取院校录取最低分数线(五)提供:黑龙江省招生考试委员会办公室阅读:34217 次时间:2011-7-122011年本科提前批录取院校录取最低分数线(六)提供:黑龙江省招生考试委员会办公室阅读:15945 次时间:2011-7-172011年本科提前批录取院校录取最低分数线(七)提供:黑龙江省招生考试委员会办公室阅读:5425 次时间:2011-7-202011年本科一批录取院校录取最低分数线(一)提供:黑龙江省招生考试委员会办公室阅读:114158 次时间:2011-7-122011年本科一批录取院校录取最低分数线(二)提供:黑龙江省招生考试委员会办公室阅读:28200 次时间:2011-7-132011年本科一批录取院校录取最低分数线(三)提供:黑龙江省招生考试委员会办公室阅读:22458 次时间:2011-7-142011年本科一批录取院校录取最低分数线(四)提供:黑龙江省招生考试委员会办公室阅读:45352 次时间:2011-7-152011年本科一批录取院校录取最低分数线(五)提供:黑龙江省招生考试委员会办公室阅读:109590 次时间:2011-7-162011年本科一批录取院校录取最低分数线(六)提供:黑龙江省招生考试委员会办公室阅读:54496 次时间:2011-7-172011年本科一批录取院校录取最低分数线(七)提供:黑龙江省招生考试委员会办公室阅读:51986 次时间:2011-7-182011年本科一批录取院校录取最低分数线(八)提供:黑龙江省招生考试委员会办公室阅读:3602 次时间:2011-7-192011年本科一批录取院校录取最低分数线(九)提供:黑龙江省招生考试委员会办公室阅读:15122 次时间:2011-7-202011年本科一批录取院校录取最低分数线(十)提供:黑龙江省招生考试委员会办公室阅读:34504 次时间:2011-7-212011年本科二批录取院校录取最低分数线(一)提供:黑龙江省招生考试委员会办公室阅读:33207 次时间:2011-7-202011年本科二批录取院校录取最低分数线(二)提供:黑龙江省招生考试委员会办公室阅读:97568 次时间:2011-7-212011年本科二批录取院校录取最低分数线(三)提供:黑龙江省招生考试委员会办公室阅读:23350 次时间:2011-7-22。
LSHT Torqmotors

LSHT Torqmotors™ and Nichols™ MotorsBG Series Brake MotorHY13-1590-011/US,EU Exceptional Strength andDurability in a High Performance Motor/Brake PackageThis brake motor consists of a BG Series motor integrat-ed into a wet disc, spring applied, hydraulically released brake. Standard holding capacity is 12,000 lb in of holding torque. The brake is front mounted for reliable operation even in the event of a system failure. The brake release port is capable of pressures to 3000 PSI.Technical Information /TechnischeInformation / Segni/Informacion TecnicaRated Brake Holding Capacity Minimum Full @ Zero Release Pressure Release Pressure Nm (in-lbs) bar (PSI)1350 (12,000)22 (315)12,000 in-lbs is standard holding capacity. For other holding capacities, see page 287.For performance data curves, see TG section.Shaded areas indicate custom order components. Standard pricing and delivery terms may not apply to these* shuttle port position as viewed from the shaft end of the motor with theports up (12:00)** Not applicable to TA365&390, TB365&390, TC365&390, TE365&390,TG625,785&960, TH625,785&960Shaded areas indicate custom order components. Standard pricing and delivery terms may not apply to theseLSHT Torqmotors™ and Nichols™ MotorsBG Series Brake MotorHY13-1590-011/US,EURadial Load / Radiale Wellenbelastung Charges Radiale / Carga Radial The maximum load curve is defined by bearing static load ca-pacity. This curve should not be exceeded at any time includ-ing shock loads.Die maximale radiale Wellenbelastungskurve ist definiert als maximale statische Last ohne Drehzahl. Sie gilt als Grenze und sollte keinesfalls überschritten werden.La courbe de charge maximale est définie par la capacité de charge statique portante. Cette courbe ne devrait être dépassée en aucun moment y compris pour les charges par à-coups.La curva de carga máxima queda definida por la capacidad de carga estática del cojinete. No se deben superar los valores de esta curva, ni siquiera con cargas provisorias de impacto.The dynamic side load curve is based on uni-directional steady state loads for L 10 bearing life at 3 x 106 revolutions.Die zulässige auslegbare radiale Wellenbelastungskurve ist unter ruhenden, einseitig statisch gerichtetenLastverhältnissen auf eine L 10 Lebensdauer mit 3 x 106 Umdrehungen kalkuliert.La courbe de charge latérale permise se base sur des charges unidirectionnelles en régime permanent pour le roulement L 10 à 3 x 106 révolutions.La curva de valores admisibles de carga lateral estábasada en cargas constantes para cojinetes L 10 a 3 x 106 revoluciones.Wheel Mount/RadnabengehauseMonture à roue/ Montaje de ruedaEquation to Calculate the Expected Radial Bearing Life Gleichung zur Ermittlung der LagerlebensdauerEquation to calculate the dynamic bearing life for a given load:Bestimmung der erlaubten radialen Wellenbelastung mit vorgegebener LastUse F a , F b and S in equation to determine hours of L 10 bearing life.Die Lebensdauer in Stunden ergibt sich durch einsetzen von F a , F b , und S in die nachstehende Formel.3 x 106{ F a }3.33L = 60 x S F bWhere / Mit: S = Shaft Speed RPM / Abtriebswellendrehzahl in min -1 L = Life In Hours / Lebensdauer in StundenF a = Dynamic side load defined by above curve at a distance from mounting flange. / Erlaubte radiale Wellenbelastung als Function der LaengeF b = Application side load. / Anwendungsseitige Wellenbelastung Note: Calculations are based on L bearing life per ISO 281.Length "L" "L" Poids/PesoWeight / Gewicht Length "L""L"Code: ASFront Mounting / Front Bolting, 7/8-14 SAE O-RingCode: BM*Poids/Peso Weight / Gewicht Code AS Code BM 0140 0170 0195 0240 0280 0335 0405 0475 0530 0625 0785 0960kg 28.4 28.7 28.9 29.3 29.7 30.1 30.1 30.7 31.3 32.8 34.3 36.1 (lb) (62.6) (63.2) (63.7) (64.5) (65.4) (66.3) (67.6) (69.1) (70.7) (72.3) (75.7) (79.5) mm 233.2 236.4 239.6 244.3 249.1 255.4 262.8 271.3 277.7 287.2 306.3 325.3 (in) (9.18) (9.31) (9.43) (9.62) (9.81) (10.06) (10.35) (10.68) (10.93) (11.31) (12.06) (12.81)0140 0170 0195 0240 0280 0335 0405 0475 0530 0625 0785 0960kg 27.3 27.5 27.8 28.1 28.5 28.9 29.5 30.2 30.9 31.7 33.2 34.9 (lb) (60.2) (60.8) (61.3) (62.1) (63.0) (63.9) (65.2) (66.7) (68.3) (69.9) (73.3) (77.1) mm 192.3 195.3 198.6 203.2 208.0 214.4 221.7 230.4 236.7 246.1 265.2 284.2 (in) (7.57) (7.69) (7.82) (8.00) (8.19) (8.44) (8.73) (9.07) (9.32) (9.69) (10.44) (11.19)Length "L""L"Code: CSRear Mounting/Thru Bolting, 7/8-14 SAE O-Ring0140 0170 0195 0240 0280 0335 0405 0475 0530 0625 0785 0960kg 27.3 27.5 27.8 28.1 28.5 28.9 29.5 30.2 30.9 31.7 33.2 34.9 (lb) (60.2) (60.8) (61.3) (62.1) (63.0) (63.9) (65.2) (66.7) (68.3) (69.9) (73.3) (77.1) mm 192.3 195.3 198.6 203.2 208.0 214.4 221.7 230.4 236.7 246.1 265.2 284.2 (in) (7.57) (7.69) (7.82) (8.00) (8.19) (8.44) (8.73) (9.07) (9.32) (9.69) (10.44) (11.19)Poids/Peso Weight / Gewicht Code CSCode: CBRear Mounting/Thru-Bolting, 7/8-14 SAE Rear PortCode A & C1 1/4" KeyedCode: 051 1/4" 14 Tooth SplineCode: 081 1/4" TaperCode: 191 3/8" J501 Taper Code: 62SAE 14 Tooth Spline。
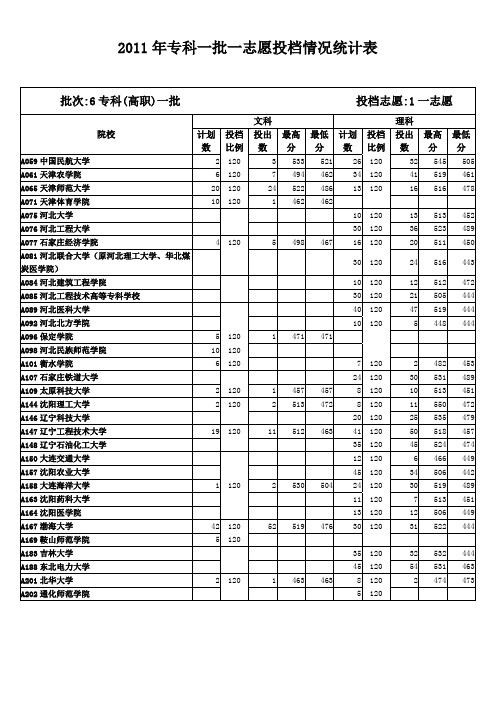
2011年山东专科一批一志愿投档情况统计表
120
2
465
456
4
120
1
446
446
C763四川工程职业技术学院
9
120
5
489
457
21
120
3
461
458
C819山东科技职业学院
10
120
4
480
456
35
120
18
509
447
C903吉林工业职业技术学院
16
120
2
479
460
62
120
6
506
452
C920南京化工职业技术学院
8
120
120
120
149
533
481
120
120
145
521
471
C064成都航空职业技术学院
5
120
15
120
3
478
459
C065四川电力职业技术学院
20
120
3
479
453
C105天津中德职业技术学院
10
120
3
481
465
25
120
23
518
444
C317常州信息职业技术学院
25
120
3
463
456
1
120
1
476
476
3
120
4
507
462
A724西安外国语大学
15
120
18
533
493
5
120
5
507
查看战机首测资格名单

大区昵称奖励north内敛的包鱼战机首测资格账号north孤傲冷清风战机首测资格账号south内敛的包鱼战机首测资格账号north E-T-D突进战机首测资格账号north黑手之王--黑桃子战机首测资格账号north Veneno战机首测资格账号north妈妈说坦克名字长很难被发现战机首测资格账号north济南装甲---退敌钢炮战机首测资格账号south絮柳扬飞战机首测资格账号north丿雅丶丨灬战机首测资格账号south灬銶丶贁灬战机首测资格账号south战斧巡航战机首测资格账号north一軳成名战机首测资格账号south裸奔-男人战机首测资格账号south给你安慰我快乐战机首测资格账号south高速飞鼠战机首测资格账号north evanle战机首测资格账号south竞技场之神战机首测资格账号north HUI熊战机首测资格账号south老虎是猫战机首测资格账号north天煞流星雨战机首测资格账号south光明魂斗罗战机首测资格账号north陌兮_Erland战机首测资格账号north浪迹长空战机首测资格账号north给力霸王龙战机首测资格账号north星间丨飞行战机首测资格账号south Vika丶Komova战机首测资格账号north Negassonh战机首测资格账号south一只小鸟一只战机首测资格账号south Kepler-22b_闪雷兽战机首测资格账号north不打蚊子oo战机首测资格账号north速度A解决战机首测资格账号south大大个三人行战机首测资格账号south血洗美利坚战机首测资格账号north不会开坦克的厨子不是个好裁缝战机首测资格账号south老赵是吊丝战机首测资格账号north半哉冲锋战机首测资格账号north祥瑞御免恶灵退散战机首测资格账号south thierry_战机首测资格账号south iamw2k战机首测资格账号south fokker战机首测资格账号south桌子底下战机首测资格账号north胖飞鸟lin战机首测资格账号north飞越封锁线战机首测资格账号north金戋缶工战机首测资格账号south tianlangxing1战机首测资格账号south Tank_King_V战机首测资格账号south冷月无心战机首测资格账号south SS闪电部队在前行战机首测资格账号north世界之天罪战机首测资格账号south刘小多多战机首测资格账号south淞沪装甲师小V战机首测资格账号south陆军指挥官HL战机首测资格账号south剃刀达人战机首测资格账号north大连小爬虫战机首测资格账号north折腾死你丫挺的战机首测资格账号south囧炮囧兵囧战机首测资格账号south xiaoqigui0808战机首测资格账号south尼吃草马吃草尼玛吃草草尼玛战机首测资格账号south弄弄高手战机首测资格账号south二比二货战机首测资格账号south太空白菜战机首测资格账号south Spark_Flame战机首测资格账号south时速三百二战机首测资格账号north11月风飞舞战机首测资格账号south每战必胜1战机首测资格账号north雨雨大宝贝战机首测资格账号south传说中的白虎战机首测资格账号north都是哑炮战机首测资格账号south几十辆I-7战机首测资格账号south歪歪的爹战机首测资格账号south最强老鼠屎战机首测资格账号north Weakness战机首测资格账号north citroen1973战机首测资格账号north ferlich战机首测资格账号south峦城力量战机首测资格账号south惩罚并奴役战机首测资格账号north Peenioey战机首测资格账号south桂林飚车战机首测资格账号south蒙特利尔之剑战机首测资格账号north hades85战机首测资格账号south守望王者战机首测资格账号north陌路君子战机首测资格账号south一品慈善堂战机首测资格账号south yqybnx战机首测资格账号north闪电龙主战机首测资格账号south我爱便宜货战机首测资格账号south东方絶言战机首测资格账号south飛翔天使翼战机首测资格账号south similekj战机首测资格账号south公羽雨辰战机首测资格账号north yzuzj2011战机首测资格账号north法修D斯丹皮特战机首测资格账号north简单丶yy战机首测资格账号south DEVASTATOR56战机首测资格账号north济南装甲---退敌钢炮战机首测资格账号north包子型坦克战机首测资格账号south风流笑哈哈战机首测资格账号north沧海云飞扬战机首测资格账号north致远九号战机首测资格账号north坦克准星战机首测资格账号north rabbo战机首测资格账号north道藏1983战机首测资格账号south刺刀雷帝战机首测资格账号south放开丶那姑娘战机首测资格账号south绝不后退孙元良战机首测资格账号north代号大金牙战机首测资格账号north onth_不朽战机首测资格账号north c2ksof战机首测资格账号south飘渺-杀猪的战机首测资格账号south calibur战机首测资格账号north冰塵火羽战机首测资格账号south8222战机首测资格账号south昕宝的小炮战机首测资格账号north雨雨大宝贝战机首测资格账号south stuka99战机首测资格账号north丿雅丶丨灬战机首测资格账号north cobralee战机首测资格账号north远征军-凌云战机首测资格账号south破甲十字战机首测资格账号south望尘落定战机首测资格账号south游戏管里员战机首测资格账号south洋洋哥_战机首测资格账号north suppersniper战机首测资格账号north伏拉蒂米尔战机首测资格账号north银河长空战机首测资格账号north梦幻魔狱战机首测资格账号south外遇________哥搞不起战机首测资格账号north梦幻亞瑟战机首测资格账号south雇佣编号9527战机首测资格账号north虎浴天火战机首测资格账号south MacrossFB7战机首测资格账号south公羽雨辰战机首测资格账号south荣誉制造者战机首测资格账号south友盟军团战机首测资格账号south Melo菜鸟战机首测资格账号south华南军区装甲师战机首测资格账号north baby小小肖战机首测资格账号north德第18集团军战机首测资格账号north贼船船长战机首测资格账号north raymondws战机首测资格账号south学友大哥战机首测资格账号south祖国万岁_战机首测资格账号south天堂没有朋友战机首测资格账号south地方小怪物战机首测资格账号south橡皮大神战机首测资格账号south镜花琉璃战机首测资格账号south霹雳铁甲008战机首测资格账号south坚挺的蛋战机首测资格账号south顽强猪兜战机首测资格账号south ddgflanker战机首测资格账号north余温微凉战机首测资格账号south-灿灿爸-战机首测资格账号south维德之拳501部队战机首测资格账号south天空V淡蓝战机首测资格账号south一小牛穿甲弹一战机首测资格账号south随风--失落战机首测资格账号south不褪色的承诺战机首测资格账号north年华如手中跌落的繁花战机首测资格账号north elevengun战机首测资格账号south虎贲雄风战机首测资格账号south众神八拳豪战机首测资格账号south水火熊猫战机首测资格账号south亚瑟之王战机首测资格账号north轰轰送你战机首测资格账号south最后的归宿战机首测资格账号south镪龍飛忝战机首测资格账号south维德之拳501部队战机首测资格账号north6363战机首测资格账号south X嘛咪嘛咪轰死你X战机首测资格账号north F-22飞行机器战机首测资格账号south冷艳II冰霜战机首测资格账号north沙场雄狮战机首测资格账号south Pk怾逑壹炮灬战机首测资格账号north巴黎欧巴桑战机首测资格账号south雷霆子龙战机首测资格账号south鐵甲依然在战机首测资格账号north咩绝湿太战机首测资格账号south钒之鼎钛战机首测资格账号south tinlog战机首测资格账号south炎王_K1战机首测资格账号north钢甲电炮战机首测资格账号north灭绝师太的老公战机首测资格账号south kirby13战机首测资格账号north D火凤凰D战机首测资格账号south行动代号大米战机首测资格账号south weichenzhen战机首测资格账号south敏敏姐姐战机首测资格账号south夏天的彩虹战机首测资格账号south坚强的小鱼战机首测资格账号south耳东王木战机首测资格账号south萝卜汤的启示战机首测资格账号north决战人间战机首测资格账号south dwj008战机首测资格账号south阿铭踏踏战机首测资格账号south小情绪闹闹战机首测资格账号north黑白闪电战机首测资格账号north s血色骷髅s战机首测资格账号south张兵装甲坦克世界旅行战机首测资格账号north Hearts丶战机首测资格账号north鐵甲依然在战机首测资格账号south wyhleon战机首测资格账号north Vip唐少战机首测资格账号south虎豹_滴血雄鹰战机首测资格账号south SEleven_Sai战机首测资格账号south撸妹撸炮撸大姨战机首测资格账号north愤怒的泰坦战机首测资格账号north法克鱿啊战机首测资格账号north拉法埃尔战机首测资格账号north无敌胖头战机首测资格账号north青峰明岳战机首测资格账号south YHHLH战机首测资格账号south天空TANK战机首测资格账号south8222战机首测资格账号south陆军指挥官HL战机首测资格账号south咆哮的豆腐战机首测资格账号south不准不打你战机首测资格账号north别打我打我浪费战机首测资格账号south rong0304战机首测资格账号south不当出头椽子战机首测资格账号south维德之拳501部队战机首测资格账号south喜力王子战机首测资格账号south ssbasten战机首测资格账号south frank1967战机首测资格账号north美轮-美奂战机首测资格账号north国际闲_人战机首测资格账号north梅卡瓦和T90战机首测资格账号north折腾死你丫挺的战机首测资格账号north luoji1250战机首测资格账号north不高兴了吧战机首测资格账号north怕死鬼来了战机首测资格账号south Tabaco战机首测资格账号north流浪大兔战机首测资格账号south阿凡提的铁驴子战机首测资格账号north hades85战机首测资格账号south___优酱丶战机首测资格账号north Vip唐少战机首测资格账号north LUMIX-LX5战机首测资格账号south传说中的小菜鸟战机首测资格账号north fshw007战机首测资格账号south dukeoooooo战机首测资格账号south gy-古龙战机首测资格账号south落林雪寒战机首测资格账号north7鹄喃吓战机首测资格账号south忧郁的小明战机首测资格账号north卡尔-迪梅菲战机首测资格账号north快乐的大洋洋战机首测资格账号south流云117战机首测资格账号south阳光一片战机首测资格账号north黑羽纱雪战机首测资格账号south遗忘的甲壳虫战机首测资格账号north小砖头专打脸战机首测资格账号south kentlike2011战机首测资格账号south慕尼黑幽灵战机首测资格账号south轻声叹息战机首测资格账号south紫荷恋雨战机首测资格账号south毛线aaa战机首测资格账号north五阀电喷战机首测资格账号north g0052f战机首测资格账号south相信rz战机首测资格账号north闪光四级管战机首测资格账号south中钢泡泡战机首测资格账号south炮杆007战机首测资格账号south钢铁炮炮龍战机首测资格账号north亮亮1818战机首测资格账号north RifleBoy战机首测资格账号north灰色老鼠战机首测资格账号south中国特种精英战机首测资格账号north铁锤轰击战机首测资格账号。
基于微分平坦的高超声速飞行器跟踪控制方法

第46卷 第3期2024年3月系统工程与电子技术SystemsEngineeringandElectronicsVol.46 No.3March2024文章编号:1001 506X(2024)03 1084 09 网址:www.sys ele.com收稿日期:20230329;修回日期:20230816;网络优先出版日期:20231024。
网络优先出版地址:http:∥link.cnki.net/urlid/11.2422.TN.20231024.1150.006基金项目:国家自然科学基金(62003351,62003352);中央高校基本科研业务费(CAUC3122019055)资助课题 通讯作者.引用格式:赵昱宇,索超,王雨潇.基于微分平坦的高超声速飞行器跟踪控制方法[J].系统工程与电子技术,2024,46(3):1084 1092.犚犲犳犲狉犲狀犮犲犳狅狉犿犪狋:ZHAOYY,SUOC,WANGYX.Differentialflatness basedtrackingcontrolmethodforhypersonicvehicle[J].SystemsEngineeringandElectronics,2024,46(3):1084 1092.基于微分平坦的高超声速飞行器跟踪控制方法赵昱宇,索 超,王雨潇(中国民航大学电子信息与自动化学院,天津300300) 摘 要:针对高超声速飞行器跟踪控制存在控制相对阶较高、过程状态约束强等问题,提出基于微分平坦的高超声速飞行器跟踪控制和外环跟踪控制方法,避免串级自抗扰控制(activedisturbancerejectioncontrol,ADRC)等控制方法带来的鲁棒性问题,微分平坦将过程状态和控制输入映射为关于平坦输出的函数,在模型线性化的同时实现了轨迹规划的约束降维。
针对不确定性较强的姿控内环,搭配ADRC从而避免微分高阶模型推导下的微分爆炸问题,ADRC不依赖于精确模型信息,提升了控制系统鲁棒性。
乘用车驻车制动性能转毂测试与评价方法
乘用车驻车制动性能转毂测试与评价方法张小龙;丁文俊;葛胜迅;韩鹏;刘鹏飞;井梅【期刊名称】《农业机械学报》【年(卷),期】2017(48)3【摘要】In order to meet the requirements for human machine optimization design,the dynamic test system was designed based on the chassis dynamometer,which was used to evaluate the parking brake performance of passenger vehicle.Firstly,the feasibility analysis was conducted for the test scheme,and the test model for the equivalent angle of parking slope was put forward.Then,the test system was designed,in which the CompactRIO (cRIO) controller and the related C modules made by National Instrument Company of America were selected as the core components.Under the consideration of the general installing requirements,both the handle force sensor and the angle sensor were selected,and their related mounting brackets were designed.Besides,the LabVIEW was employed to program the code for the controller and the host computer,in which the functions,such as data collection,data processing,communication and GUI,were conducted reliably in real time.Thirdly,the test method was explored,in which these influence factors were taken into consideration,such as elastic elements rebound,surface state of brake drum or disk,processing technology.In particular,the method of probability and statistics were introduced to evaluate the parking brakeperformance.Finally,the test system was used to conduct several tests and it worked reliably,and it met the design requirements.The result showed that it was effective and plausible for the dynamometer based test system and the evaluation method proposed for the parking brake performance of passenger vehicle.%为满足乘用车驻车制动系统人机优化设计需要,设计了基于转毂试验台的驻车制动动力学性能测试系统并进行性能评价方法研究.首先,建立了在转毂试验台上进行等效驻坡度的测试模型.其次,构建了以美国NI嵌入式控制器cRIO及其C模块为核心的测试系统,对手柄力传感器和角位移传感器进行选型,设计了安装夹具以满足车上通用性安装要求.基于LabVIEW对数据采集器和上位机进行编程,实时可靠地实现数据采集、处理、通讯和人机交互等功能.再次,进行了测试方法研究,综合考虑了弹性元件回弹、制动毂或盘的表面状态、加工工艺等影响因素,引入概率统计方法对驻车制动性能进行评价.最后,进行了系统的实车试验,结果表明设计的测试系统能够可靠工作,满足既定要求.研究表明提出的基于转毂试验台的乘用车驻车制动性能测试与评价方法是有效可行的.【总页数】7页(P361-367)【作者】张小龙;丁文俊;葛胜迅;韩鹏;刘鹏飞;井梅【作者单位】安徽农业大学工学院,合肥230036;安徽农业大学工学院,合肥230036;安徽江淮汽车集团股份有限公司技术中心,合肥230601;安徽江淮汽车集团股份有限公司技术中心,合肥230601;安徽农业大学工学院,合肥230036;安徽农业大学工学院,合肥230036【正文语种】中文【中图分类】U467.1【相关文献】1.商用车排气辅助制动性能转鼓测试与评价方法 [J], 王恒;邵彦;汪旭明;韩鹏;张小龙2.测试液力缓速器持续制动性能的转毂试验方法 [J], 耿凤鸣;孙博3.乘用车驻车制动拉索振动断裂验证方法研究 [J], 刘成华;武文超4.液力缓速器持续制动性能测试的转毂试验方法 [J], 耿凤鸣;陈俊宇5.基于底盘测功机的乘用车制动器温度场性能测试与评价 [J], 王鸿飞; 方华; 丁文俊; 韩鹏因版权原因,仅展示原文概要,查看原文内容请购买。
飞行员招考基础知识考试题库(精练500题)

B44号和5号侧窗C43等侧窗D43号和4号风挡答案:A115.起落架指示灯根据什么亮或灭?A4起落架和起落架手柄的位置及推力手柄的位置B、空/地安全传感器和起落架手柄的位置C4从起落架和起落架手柄来的电信号D、襟翼和推力手柄的位置答案:A116.737-800导航系统包括哪些?A、FMS x GPS4ADIRSB4无线电导航系统(ADF、DME、I1.S、指点标和VOR)C4应答机和气象雷达D、以上都是答案:D117.伴随雷暴的风切变,其出现位置的最正确的说法是A,仅出现在雷暴单体的前方右侧B、出现在雷暴单体的所有侧边和雷暴单体的正下方Cv出现在雷暴单体运动的前方和单体之正下方答案:B118.737-800如何实现直飞和切入?A、通过航段页面修改现用航路点Bv如果是切入,在草稿行输入被修改的现用航路点的切入航道,按压右61NTCC RS(切入航道)行选键C、以上都对答案:C119.要能越过前方障碍物.应该选用什么方式爬升A t最大上升角B、最大上升率答案:A120.在一定条件下才能运输的特殊旅客应如何办理?A、运输前必须事先取得公司同意B4无须取得公司同意.由地面人员安排C4机长同意即可运输答案:A121.飞机距最近的海岸线多少公里(海里)为延伸跨水飞行?Ax185公里(100海里)B493公里(50海里)C4飞行超过30分钟答案:B122.正常情况下,APU或发动机的灭火手柄灯亮都会导致相应的灭火手柄自动开锁。
As对B t错答案:A123离场/进场索引页第6行其他机场,通过草稿行输入到该机场的离场/进场页,所显示的信息可见但无法选择<•这种说法是否正确?A、对B、错答案:A124.在飞机电气系统有正常电源的情况下,将备用电源电门放到“BAT”位,则备用交流汇流条由谁供电?A4仍保持由交流转换汇流条供电B、由电瓶通过睁变流机供电C4由电瓶汇流条通过静变流机供电答案:B125.报告飞机脱离跑道的条件是:A、机头越过等待线Bv飞机前轮越过等待线C、整个飞机包括机尾部分均脱离跑道等待线以外答案:C126.飞机I1.S进近时,HS1.航道偏高杆偏左,下滑指标在零位以下,表明BA、飞机偏在航向道左边,低于下滑道B、飞机偏在航向道右边,高于下滑道C、飞机偏在航向道右边,低于下滑道B、顺风C、逆风答案:B239.飞机在地面正常断开交流电后应及时关断电瓶电门,为什么?A4备用电源电门放AUTO位可自动转换,及时关断电瓶电门将会避免损耗电瓶的电B、不使自动转换,没有影响C4如果在5分钟内不关,APU将自动起动答案:A240.当飞机正切电台时,如果电台在左侧,则电台相对方位应为A4270°B、90°G180*答案:A241.在起飞过程中,无线电高度480英尺时,若要终止飞行指引仪的起飞方式,可以A.接通一部自动驾驶Bv选择其他的俯仰方式C4选择其他的飞行指引仪横滚方式Ds以上都对答案:D242.哪种类型的天气与具有暖、湿、不稳定气团的发展中的暖锋有关答案:B399.每位旅客岫身携带的物品至量是多少公斤?Ai5公斤B、10公斤C、15公斤答案:A400排雨系统包括:As风挡上的一个永久的排雨膜和雨刷B、机长座椅后面的瓶装液体Cv前顶板上的排雨电门D4前顶板上的排雨电门答案:A401.压下反推手柄指令反推收回时,位于后顶板上的反推灯亮超过多长时间说明存在故障?A、8秒B、10秒G12秒答案:C402.如果看到前方同高度有英状云,以下规避措施中最合适的是Ax降低高度Bv上升高度C4目视绕飞D4A或B答案:D407.在雷暴的生存周期中,哪一阶段的特征是云中充满下降气流A、积云阶段B、成熟阶段G消散阶段答案:C408.在彩色气象雷达上,显示红色的区域代表什么天气A、大雨区B4中雨区C4暴雨和湍流区答案:A409起落架减震支柱上的地面安全电门主要功用:A4保证起落架的地面工作安全B、飞机接地断开收放控制电路,防止地面误收起落架C、飞机离地断开收放控制电路,防止飞行中掉下答案:B410.下述何种天气现象标志若雷暴已进入成熟阶段Ax地面开始下雨B4出现了砧状云顶C、云体增长速度达到最大答案:A472.EEC在什么方式下对什么参数进行红线保护。
2011款 Edition Style

最大功率(kW)
254
最大功率转速(rpm)
6500
最大扭矩(N·m)
390
最大扭矩转速(rpm)
4400
发动机特有技术
-
燃料形式
汽油
燃油标号
97号
供油方式
直喷
缸盖材料
铝
缸体材料
铝
环保标准
欧IV
软顶敞篷车
车门数(个)
2
座位数(个)
2
油箱容积(L)
67
行李厢容积(L)
105
2011款Edition Style敞篷版发动机
发动机型号
M97/05
汽缸容积(cc)
3614
排量(L)
3.6
工作方式自然吸气汽缸排列式H汽缸数(个)
6
每缸气门数(个)
4
压缩比
12.5
气门结构
DOHC
缸径
-
冲程
-
最大马力(Ps)
287
官方0-100加速(s)
4.9
工信部综合油耗(L)
-
整车质保
两年不限公里
2011款Edition Style敞篷版车身
长度(mm)
4435
宽度(mm)
1852
高度(mm)
1310
轴距(mm)
2350
前轮距(mm)
1488
后轮距(mm)
1548
最小离地间隙(mm)
-
整备质量(Kg)
1605
车身结构
2011款Edition Style敞篷版基本参数
车型名称
保时捷911 2011款Edition Style敞篷版
厂商指导价(元)
寻找UTM中的“高富帅”

寻找UTM中的“高富帅”
佚名
【期刊名称】《网络运维与管理》
【年(卷),期】2013(000)003
【摘要】UTM(统一威胁管理)是保护企业信息安全的设备。
这个不为普通大众所了解的、部署在企业网络边界的、四四方方造型简单的铁盒子看上去和网络流行语“高富帅”风马牛不相及。
但是只要您仔细寻找,就会发现在众多的UTM中也有鹤立鸡群的“高富帅”,UTM也可以让人眼前一亮。
【总页数】1页(P152-152)
【正文语种】中文
【中图分类】TP393.08
【相关文献】
1.农学中的“高富帅”专业
2.寻找“高富帅”——上市公司2012中报聚焦
3.“珍珠鲩”,鲩鱼中的“高富帅”塘头价19元/斤,是普通鲩鱼价格的3倍多
4.SUV 中“高富帅”
5.如何处理好教学中的趣味性与科学性?——关于一道涉及“高富帅”“吊丝”的试题探讨
因版权原因,仅展示原文概要,查看原文内容请购买。
黄山学院市级科研平台简介——黄山市智能功率集成创新中心

黄山学院市级科研平台简介——黄山市智能功率集成创新中
心
佚名
【期刊名称】《黄山学院学报》
【年(卷),期】2024(26)1
【摘要】黄山市智能功率集成创新中心成立于2021年,负责人为宁仁霞教授。
中心旨在联合省内多家电力电子行业公司共同研发智能功率模块产品技术。
目前得到多家汽车电子行业公司的支持,它们对创新中心研制的样品进行整机验证和推广。
创新中心具有智能功率模块设计、仿真、加工、检测、可靠性试验等全套研究开发能力,将对安徽省功率半导体产业的发展起到积极推动作用。
【总页数】1页(PF0002)
【正文语种】中文
【中图分类】F42
【相关文献】
1.黄山学院市级科研平台简介——黄山市电动汽车充换电与驱动系统工程技术研究中心
2.黄山学院市级科研平台简介——装配式建筑黄山市技术创新中心
3.黄山学院市级科研平台简介——黄山市文旅大数据技术创新中心
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
、.~①我们‖打〈败〉了敌人。
②我们‖〔把敌人〕打〈败〉了。
A thesis submitted toin partial fulfillmentof the requirementfor the degree ofMaster of Engineering知识产权法第一专题著作权一、著作权的取得①著作权因作品的创作完成,形成作品这一法律事实的存在而自然取得,而不需再履行任何法定手续。
即著作权自动取得。
②首先在中国境内出版的外国人、无国籍人的作品,其著作权自首次出版之日起受保护。
③外国人、无国籍人的作品在中国境外首先出版后,30日内在中国境内出版的,视为该作品同时在中国境内出版。
④外国人、无国籍人的作品,根据作者所属国、经常居住地国与中国签订的协议、共同参加的国际条约享有的著作权,受中国法保护;未与中国签订协议,共同参加国际条约的国家的作者、无国籍人的作品,首次在中国参加的国际条约的成员国出版的;或在成员国、非成员国同时出版的,也受中国法保护。
例题:小刘从小就显示出很高的文学天赋,九岁时写了小说《隐形翅膀》,并将该小说的网络传播权转让给某网站。
小刘的父母反对该转让行为。
下列哪一说法是正确的?(C.2009.三.14)A、小刘父母享有该小说的著作权,因为小刘是无民事行为能力人B、小刘及其父母均不享有著作权,因为该小说未发表C、小刘对该小说享有著作权,但网络传播权转让合同无效D、小刘对该小说享有著作权,网络传播权转让合同有效二、作者1、作者即创作作品的人。
2、创作的含义是直接产生文学、艺术及科学作品的智力活动,以下辅助性行为均不视为创作:(1)为他人创作进行组织工作(2)提供咨询意见(3)提供物质条件(4)进行其他辅助工作例题:甲提供资金,乙组织丙和丁以乡村教师戊为原型创作小说《小河弯弯》。
在创作中丙写提纲,丁写初稿,丙修改,戊提供了生活素材,乙提供了一些咨询意见。
下列哪些选项是错误的?(ABC.2007.三.60)A、甲提供资金是完成创作的保障,应为作者B、乙作为组织者并提供咨询意见,应为作者C、戊提供生活素材,应为作者D、丁有权不经甲、乙、丙的同意发表该小说3、作者并不仅限于公民,一部作品同时符合下列条件时,法人、其他组织视为作者(拟制):(1)由法人、其他组织主持(2)代表法人、其他组织意志创作(3)由法人、其他组织承担责任4、作者推定。
如无相反证明,在作品上署名的公民、法人或其他组织即为作者。
三、著作权的主体(一)一般作品(二)合作作品的著作权合作作品是指两人以上共同创作完成的作品。
合作作品的作者须具备创作合意与合创事实两个条件。
合作作品的著作权属于全体作者,对著作权的形式须征得全体合作作者的同意。
对于可以分割的作品,作者对于各自创作的部分可以单独享有著作权,但不得侵犯合作作品整体的著作权。
对于不可分割使用的,由合作作者协商一致行使;协商不成的,无正当理由任何一方不得阻止他方行使除转让以外的权利,所得收益应合理分配给所有合作作者。
(三)演绎作品的著作权演绎作品是指通过改编、翻译、注释、整理已有作品而产生的作品。
演绎行为是演绎着的创造性劳动,也是一种创作方式。
因此,法律规定,演绎作品的著作权由演绎者享有但其对著作权的行使,不得侵犯原作品的著作权。
另外第三人在使用演绎作品时,应征求原作者和演绎作品作者的同意。
(四)汇编作品的著作权人汇编若干作品、作品的片段或者不构成作品的数据或者其他材料,对其内容的选择或者编排体现独创性的作品,为汇编作品,其著作权由汇编人享有,但行使著作权时,不得侵犯原作品的著作权。
(五)影视作品的著作权影视作品是指电影作品或以类似摄制电影的方式创作的作品。
影视作品的著作权由制片人享有,但编剧、导演、摄影、作词、作曲等的作者享有署名权和依合同获得报酬权。
影视作品中的剧本音乐等可以单独使用的作品的作者,有权单独行使其著作权。
(六)委托作品的著作权委托作品是指作为受托人的作者按照委托人的意志和要求而创作的作品。
关于委托作品著作权的归属,由委托人和受托人通过合同约定解决,没有订立合同或合同没有明确约定的,为保护作者权益著作权属于受托人,即作者本人。
例题:甲公司委托乙公司设计并制作产品包装盒,未签订书面合同。
丙在市场上发现该产品包装盒上未经其许可使用了其画《翠竹》作为背景图案。
如果该产品包装盒的整体设计也构成美术图案,下列哪些选项是正确的?(BCD.2007.三.58)A、产品包装盒的版权属于甲公司B、乙公司侵害了丙的复制权C、甲公司对乙公司的侵权行为不知情,但仍构成侵权D、甲公司不能对产品包装盒获得外观设计专利(七)美术作品的著作权美术作品的著作权由作者享有。
但须注意美术作品和美术作品载体的关系,作品原件的所有权与作品的著作权是相区别的。
“美术作品与原件所有权的转移,不视为作者著作权的转移”,此规则也适用于计算机软件等具有知识产权的标的物,但法律另有规定或当事人另有约定的除外。
但美术作品原件的所有权享有展览权,此外的其他权利仍由著作权人享有。
(八)身份不明的作品的著作权身份不明的作品是制作者不具名或不写其真实姓名的作品。
身份不明的作品由作品原件合法持有人行使除署名权外的著作权。
作者身份确定后,由作者或其继承人行使著作权。
作者身份不明的作品,只有作品是原件,且必须是合法持有人才享有除署名权以外的著作权。
作者身份不明的作品其著作权法第十一条第一款第(五)至(十七)项规定的权利的保护期截止于作品首次发表后50年的12月31日。
作者身份确定后适用著作权法第二十一条的规定,就是终身家死亡后50年。
(九)职务作品公民为完成法人或者其他组织工作任务所创作的作品是职务作品,除本条第二款的规定以外,著作权由作者享有,但法人或者其他组织有权在其业务范围内优先使用。
作品完成两年内,未经单位同意,作者不得许可第三人以与单位使用的相同方式使用该作品。
(十)自传体作品当事人合意以特定人物经历为题材完成的自传体作品,当事人对著作权权属有约定的,依其约定;没有约定的,著作权归该特定人物享有,执笔人或整理人对作品完成付出劳动的,著作权人可以向其支付适当的报酬。
因此自传体作品的著作权原则上归传主所享有。
例题:国画大师李某欲将自己的传奇人生记录下来。
邀请作家王某执笔,其助手张某整理素材。
王某以李某的人生经历为素材完成了自传体小说《我的艺术人生》。
李某向王某支付了5万元,但未约定著作权的归属。
该小说的著作权应当归谁所有?(B.2006.三.17)A、归王某所有B、归李某所有C、归王某和张某共同所有D、归王某、张某和李某三人共同所有四、著作权的内容(一)著作人身权1、发表权,即作者依法决定是否将其作者公之于众的权利。
“公之于众”是指将作品像不特定的人公开,但不以公众知晓为要件。
发表权是一次性的权利,一经行使即归消灭。
2、署名权,即标明作者身份在作品上署名的权利。
具体包括作者决定是否署名及如何署名等。
3、修改权,即作者本人或授权他人修改其作品的权利。
4、保护作品完整权,即保护作品不受歪曲、篡改的权利。
(二)著作财产权著作财产权是指著作权人依法享有的控制其作品的使用并获取财产收益的权利,主要内容包括:1、复制权,即通过印刷、拓印等方式将作品复制一份或多份的权利。
2、发行权,即以出售或赠与的方式向公众提供作品原件或复制件的权利。
3、出租权,即有偿许可他人临时使用电影作品或以类似摄制电影的方式创作的作品计算机软件的权利,但计算机软件不是出租的主要标的除外。
4、展览权,即公开陈列美术作品摄影作品原件或复制件的权利。
5、表演权,即公开表演作品,及用各种手段公开播送作品的权利。
6、放映权,即通过各种技术设备公开再现美术、摄影、电影等作品的权利。
7、广播权,即以无线、有线或转播的方式向公众传播广播的作品,以及通过扩音器或其他设备向公众传播广播的作品的权利。
8、信息网路传播权,即以无线或有线的方式,向公众提供作品,使公众可以在其选定的时间和地点获得作品的权利。
9、摄制权,即以摄制电影或以类似摄制电影的方式将作品固定在有关载体上的权利。
10、改编权、翻译权、汇编权等应当由著作权人享有的其他权利。
11、转让权,著作权人可以转让上述部分或全部权利并获取报酬的权利。
12、许可使用权,是指著作权人通过与他人签订使用许可合同,许可他人使用其作品并获得报酬的权利。
13、获得报酬权是指著作权人依法享有的因作品的使用或转让而获得报酬的权利。
五、著作权的合理使用著作权的合理使用是指针对他人已经发表的作品,根据法律的规定,在不必征得著作权人同意的情况下,而无偿使用其作品的行为,但应指明作者姓名、作品名称,并不得侵犯著作权人的其他权利。
根据《著作权法》22条的规定合理使用的范围包括:(一)为个人学习、研究或者欣赏,使用他人已经发表的作品;(二)为介绍、评论某一作品或者说明某一问题,在作品中适当引用他人已经发表的作品;(三)为报道时事新闻,在报纸、期刊、广播电台、电视台等媒体中不可避免地再现或者引用已经发表的作品;(四)报纸、期刊、广播电台、电视台等媒体刊登或者播放其他报纸、期刊、广播电台、电视台等媒体已经发表的关于政治、经济、宗教问题的时事性文章,但作者声明不许刊登播放的除外;(五)报纸、期刊、广播电台、电视台等媒体刊登或者播放在公众集会上发表的讲话,但作者声明不许刊登、播放的除外;(六)为学校课堂教学或者科学研究,翻译或者少量复制已经发表的作品,供教学或者科研人员使用,但不得出版发行;(七)国家机关为执行公务在合理范围内使用已经发表的作品;(八)图书馆、档案馆、纪念馆、博物馆、美术馆等为陈列或者保存版本的需要,复制本馆收藏的作品;(九)免费表演已经发表的作品,该表演未向公众收取费用,也未向表演者支付报酬;(十)对设置或者陈列在室外公共场所的艺术作品进行临摹、绘画、摄影、录像;(十一)将中国公民,法人或者其他组织已经发表的以汉语言文字创作的作品翻译成少数民族语言文字作品在国内出版发行;将已经发表的汉语言文字作品翻译成少数民族文字在国内发行;将已经发表的作品改成盲文出版,在我国均属于合理使用。
(十二)将已经发表的作品改成盲文出版。
六、著作权法定使用许可制度法定许可使用制度是指依照著作权法的规定,传播者在使用他人已经发表但没有著作权保留声明的作品时,可以不经著作权人的许可,但应在向其支付报酬,并尊重著作权人其他权利的制度。
法定许可与合理使用的主演区别在于:首先,合理使用无须向著作权人支付报酬,而法定许可则必须向著作权人支付报酬;其次,合理使用的范围较为广泛,我国著作权法第二十二条规定十二种,而法定许可的范围较窄;再次,前者是任何人用,后者是传播这的特权。
根据《著作权法》的规定,法定许可包括以下几种情况:(一)作品在刊登后,著作权人声明不得转载、摘编的以外,其他报刊可以转载或作为文摘、资料刊登,但应当向作者支付报酬。