温度传感器C程序
仪表自动化专业试题及答案

仪表自动化专业试题及答案一、选择题(每题2分,共20分)1. 仪表自动化中常用的传感器类型不包括以下哪一项?A. 温度传感器B. 压力传感器C. 流量传感器D. 音频传感器答案:D2. 以下哪个不是自动化控制系统的组成部分?A. 传感器B. 执行器C. 显示器D. 电源答案:D3. 在自动化控制系统中,PID控制器的“P”代表什么?A. 比例(Proportional)B. 积分(Integral)C. 微分(Derivative)D. 程序(Program)答案:A4. 下列哪个设备不属于自动化控制系统的执行元件?A. 阀门B. 电机C. 继电器D. 传感器答案:D5. 仪表自动化中,以下哪个术语与“反馈”无关?A. 闭环控制B. 开环控制C. 正反馈D. 负反馈答案:B6. 以下哪个不是自动化仪表的常见故障类型?A. 电源故障B. 信号干扰C. 机械故障D. 软件升级答案:D7. 在自动化控制系统中,什么是“开环控制”?A. 控制器根据反馈信号调整输出B. 控制器不使用反馈信号C. 控制器只使用输入信号D. 控制器只使用输出信号答案:B8. 以下哪个是自动化控制系统中常用的控制算法?A. PID控制B. 线性控制C. 非线性控制D. 所有选项都是答案:A9. 仪表自动化中,以下哪个术语与“控制”无关?A. 控制器B. 执行器C. 传感器D. 显示器答案:D10. 在自动化控制系统中,什么是“闭环控制”?A. 控制器根据反馈信号调整输出B. 控制器不使用反馈信号C. 控制器只使用输入信号D. 控制器只使用输出信号答案:A二、填空题(每空1分,共10分)11. 自动化控制系统的三个基本环节是:____、____、执行器。
答案:传感器;控制器12. PID控制器中的“D”代表的是______。
答案:微分(Derivative)13. 在自动化控制系统中,______是指系统输出与输入成反比的现象。
海康威视 X20(c)AT4222 温度传感器系统用户手册说明书

X20TB12
Short description Temperature measurement X20 temperature input module, 4 inputs for resistance measurement, PT100, PT1000, resolution 0.1°C, 3-wire connections
for hazardous locations Class I, Division 2, Groups ABCD, T5
Zone 2, II 3G Ex nA nC IIA T5 Gc
IP20, Ta (see X20 user's manual)
FTZÚ 09 ATEX 0083X
Temperature: B (0 - 55°C) Humidity: B (up to 100%)
0.1 to 4500 Ω / 0.05 to 2250 Ω 1st-order low pass / cutoff frequency 500 Hz
EN 60751 >0.7 V 500 Veff Internal
250 µA ±1.25% 4530 Ω ±0.1% Short-term max. ±30 V
• 4 inputs for resistance temperature measurement • For PT100 and PT1000 • Configurable sensor type per channel • Direct resistance measurement • Configurable 2- or 3- wire connections per module • Configurable filter time
ds18b20的C语言完整程序(c51)
ds18b20的C语言完整程序(c51)(可组网数字式温度传感器)发布日期:[2005-05-10]作者:(sparkstar)//DS1820 C51 子程序//这里以11.0592M晶体为例,不同的晶体速度可能需要调整延时的时间//sbit DQ =P2^1;//根据实际情况定义端口typedef unsigned char byte;typedef unsigned int word;//延时void delay(word useconds){for(;useconds>0;useconds--);}//复位byte ow_reset(void){byte presence;DQ = 0; //pull DQ line lowdelay(29); // leave it low for 480usDQ = 1; // allow line to return highdelay(3); // wait for presencepresence = DQ; // get presence signaldelay(25); // wait for end of timeslotreturn(presence); // presence signal returned} // 0=presence, 1 = no part//从 1-wire 总线上读取一个字节byte read_byte(void){byte i;byte value = 0;for (i=8;i>0;i--){value>>=1;DQ = 0; // pull DQ low to start timeslotDQ = 1; // then return highdelay(1); //for (i=0; i<3; i++);if(DQ)value|=0x80;delay(6); // wait for rest of timeslot}return(value);}//向 1-WIRE 总线上写一个字节void write_byte(char val){byte i;for (i=8; i>0; i--) // writes byte, one bit at a time {DQ = 0; // pull DQ low to start timeslotDQ = val&0x01;delay(5); // hold value for remainder of timeslotDQ = 1;val=val/2;}delay(5);}//读取温度char Read_Temperature(void){union{byte c[2];int x;}temp;ow_reset();write_byte(0xCC); // Skip ROMwrite_byte(0xBE); // Read Scratch Padtemp.c[1]=read_byte();temp.c[0]=read_byte();ow_reset();write_byte(0xCC); //Skip ROMwrite_byte(0x44); // Start Conversionreturn temp.x/2;}。
pid算法温度控制c语言程序
pid算法温度控制c语言程序PID算法是一种常用的温度控制算法,广泛应用于各种温度控制系统中。
在C语言中,我们可以通过编写程序来实现PID算法的温度控制功能。
我们需要了解PID算法的基本原理。
PID算法是通过对系统的反馈信号进行不断调整,使得系统的输出达到期望值。
PID算法由三个部分组成:比例控制、积分控制和微分控制。
比例控制根据反馈信号与期望值的差异来调整输出;积分控制根据反馈信号与期望值的累积差异来调整输出;微分控制根据反馈信号的变化率来调整输出。
在C语言中,我们可以使用变量来表示系统的输入、输出和期望值。
以下是一个简单的示例代码:```c#include <stdio.h>// 定义PID参数float Kp = 1.0; // 比例系数float Ki = 0.5; // 积分系数float Kd = 0.2; // 微分系数// 定义系统变量float setpoint = 25.0; // 期望值float input = 0.0; // 输入值float output = 0.0; // 输出值// 定义误差变量float error = 0.0; // 当前误差float last_error = 0.0; // 上一次误差float integral = 0.0; // 累积误差// PID算法函数float pid_algorithm(float setpoint, float input) {// 计算误差error = setpoint - input;// 计算比例控制float proportional = Kp * error;// 计算积分控制integral += error;float integral_control = Ki * integral;// 计算微分控制float derivative = Kd * (error - last_error); // 计算输出output = proportional + integral_control + derivative;// 更新误差last_error = error;return output;}int main(){// 模拟温度传感器的输入input = 23.5;// 调用PID算法函数output = pid_algorithm(setpoint, input);// 打印输出结果printf("Output: %.2f\n", output);return 0;}```在上述代码中,我们首先定义了PID算法的参数和系统变量。
基于51单片机的温度检测系统_单片机C语言课题设计报告

单片机C语言课题设计报告设计题目:温度检测电气系2011级通信技术一班级通信技术一班通才达识,信手拈来通才达识,信手拈来1摘要本课题以51单片机为核心实现智能化温度测量。
利用18B20温度传感器获取温度信号,将需要测量的温度信号自动转化为数字信号,利用单总线和单片机交换数据,最终单片机将信号转换成LCD 可以识别的信息显示输出。
基于STC90C516RD+STC90C516RD+的单片机的智能温度检测系统,的单片机的智能温度检测系统,设计采用18B20温度传感器,其分辨率可编程设计。
本课题设计应用于温度变化缓慢的空间,综合考虑,以降低灵敏度来提高显示精度。
设计使用12位分辨率,因其最高4位代表温度极性,故实际使用为11位半,位半,而温度测量范围为而温度测量范围为而温度测量范围为-55-55-55℃~℃~℃~+125+125+125℃,℃,则其分辨力为0.06250.0625℃。
℃。
设计使用LCD1602显示器,可显示16*2个英文字符,显示器显示实时温度和过温警告信息,和过温警告信息,传感器异常信息设。
传感器异常信息设。
传感器异常信息设。
计使用蜂鸣器做警报发生器,计使用蜂鸣器做警报发生器,计使用蜂鸣器做警报发生器,当温度超过当温度超过设定值时播放《卡农》,当传感器异常时播放嘟嘟音。
单片机C 语言课题设计报告语言课题设计报告电动世界,气定乾坤2目录一、设计功能一、设计功能................................. ................................. 3 二、系统设计二、系统设计................................. .................................3 三、器件选择三、器件选择................................. .................................3 3.1温度信号采集模块 (3)3.1.1 DS18B20 3.1.1 DS18B20 数字式温度传感器数字式温度传感器..................... 4 3.1.2 DS18B20特性 .................................. 4 3.1.3 DS18B20结构 .................................. 5 3.1.4 DS18B20测温原理 .............................. 6 3.1.5 DS18B20的读写功能 ............................ 6 3.2 3.2 液晶显示器液晶显示器1602LCD................................. 9 3.2.1引脚功能说明 ................................. 10 3.2.2 1602LCD 的指令说明及时序 ..................... 10 3.2.3 1602LCD 的一般初始化过程 (10)四、软件设计四、软件设计................................ ................................11 4.1 1602LCD 程序设计流程图 ........................... 11 4.2 DS18B20程序设计流程图 ............................ 12 4.3 4.3 主程序设计流程图主程序设计流程图................................. 13 五、设计总结五、设计总结................................. ................................. 2 六、参考文献六、参考文献................................. ................................. 2 七、硬件原理图及仿真七、硬件原理图及仿真......................... .........................3 7.1系统硬件原理图 ..................................... 3 7.2开机滚动显示界面 ................................... 4 7.3临界温度设置界面 ................................... 4 7.4传感器异常警告界面 (4)电气系2011级通信技术一班级通信技术一班通才达识,信手拈来通才达识,信手拈来3温度温度DS18B20 LCD 显示显示过温函数功能模块能模块传感器异常函数功能模块数功能模块D0D1D2D3D4D5D6D7XT XTAL2AL218XT XTAL1AL119ALE 30EA31PSEN29RST 9P0.0/AD039P0.1/AD138P0.2/AD237P0.3/AD336P0.4/AD435P0.5/AD534P0.6/AD633P0.7/AD732P2.7/A1528P2.0/A821P2.1/A922P2.2/A1023P2.3/A1124P2.4/A1225P2.5/A1326P2.6/A1427P1.01P1.12P1.23P1.34P1.45P1.56P1.67P1.78P3.0/RXD 10P3.1/TXD11P3.2/INT012P3.3/INT113P3.4/T014P3.7/RD17P3.6/WR 16P3.5/T115U180C51X1CRYST CRYSTAL ALC122pFC222pFGNDR110kC31uFVCCGND234567891RP1RESPACK-8VCC0.0DQ 2VCC 3GND 1U2DS18B20R24.7K LCD1LM016LLS2SOUNDERMUC八、程序清单八、程序清单................................. .................................5 一、设计功能·由单片机、温度传感器以及液晶显示器等构成高精度温度监测系统。
LM35高精度摄氏温度传感器说明书
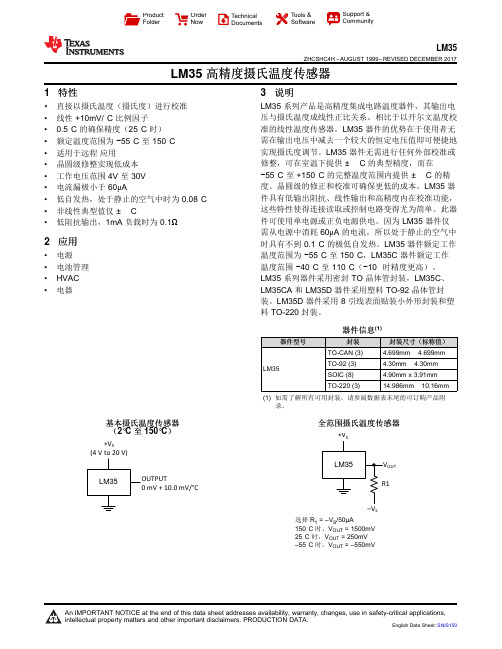
+V SOUTS+V S(4 V to 20 V)ProductFolder OrderNow TechnicalDocuments Tools &SoftwareSupport &CommunityLM35ZHCSHC4H –AUGUST 1999–REVISED DECEMBER 2017LM35高精度摄氏温度传感器1特性•直接以摄氏温度(摄氏度)进行校准•线性+10mV/°C 比例因子•0.5°C 的确保精度(25°C 时)•额定温度范围为−55°C 至150°C •适用于远程应用•晶圆级修整实现低成本•工作电压范围4V 至30V •电流漏极小于60μA•低自发热,处于静止的空气中时为0.08°C •非线性典型值仅±¼°C•低阻抗输出,1mA 负载时为0.1Ω2应用•电源•电池管理•HVAC •电器3说明LM35系列产品是高精度集成电路温度器件,其输出电压与摄氏温度成线性正比关系。
相比于以开尔文温度校准的线性温度传感器,LM35器件的优势在于使用者无需在输出电压中减去一个较大的恒定电压值即可便捷地实现摄氏度调节。
LM35器件无需进行任何外部校准或修整,可在室温下提供±¼°C 的典型精度,而在−55°C 至+150°C 的完整温度范围内提供±¾°C 的精度。
晶圆级的修正和校准可确保更低的成本。
LM35器件具有低输出阻抗、线性输出和高精度内在校准功能,这些特性使得连接读取或控制电路变得尤为简单。
此器件可使用单电源或正负电源供电。
因为LM35器件仅需从电源中消耗60μA 的电流,所以处于静止的空气中时具有不到0.1°C 的极低自发热。
LM35器件额定工作温度范围为−55°C 至150°C ,LM35C 器件额定工作温度范围−40°C 至110°C (−10°时精度更高)。
单片机控制的温度传感器C语言程序

#include 〈at89x52.h>#define DO P3_7#define SEG P0 //数码管自左至右依次为1234位#define MS2L 0x18 //1ms的延时参数#define MS2H 0xfc#define uchar unsigned char#define uint unsigned intuchar code comm[4] = {0x01,0x02,0x04,0x08};uchar code seg[10] = {0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};uchar code seg_add_dicimal[10]= {0x40,0x79,0x24,0x30,0x19,0x12,0x02,0x78,0x00,0x10};uchar code seg_dicimal[2]={0xc0, 0x92};uchar k = 0;uchar temp_l = 0;uchar temp_h = 0;uchar tempsign = 0;uchar hundreds = 0;uchar tens = 0;uchar ones = 0;uchar low_four = 0;/*延时以ms为单位的t时间*/void Delay(uint t){uint i;while(t--){for(i=0;i<125; i++){}}}/*us级延时,延时时间约4+2*i*/void Delayus(uchar i){while(——i);}/*产生复位脉冲,等待应答信号*/void Resetpaulse(){DO = 0; //拉低约600usDelayus(150);Delayus(150);DO = 1;//产生上升沿,延时约15~60usDelayus(30);while(~DO);//等待应答信号}/*读取数据一位*/bit Readbit(){uint i = 0;bit b = 0;DO = 0;//产生读时隙i++;//维持低电平至少1usDO = 1;//1us以上后拉高Delayus(2); //延时8us,DO下降沿15内ds18b20输出的数据才有效b = DO;//读取数据Delayus(40); //每个读时隙至少持续60usreturn(b);}/*读取一个字节*/uchar Readbyte(){uchar byte_read = 0;uchar i, j;for(i=0;i<8; i++){j = Readbit();byte_read = (j〈<i)| byte_read; //低位读起}return(byte_read);}/*写一个字节*/void Writebyte(uchar byte_to_write){uchar i = 0;uchar j = 0;bit write_bit = 0;for(j=0; j<8; j++){write_bit = (byte_to_write &0x01);if(write_bit == 1)//写1{DO = 0; //产生写时隙Delayus(3); //延时15usDO = 1; //写1Delayus(40); //延时,写时隙不得低于60us}else{DO = 0;//产生写时隙Delayus(50);//延时,保持低约60us~120usDO = 1;i++;}byte_to_write = byte_to_write >〉1;}}/*配置ds18b20,9位分辨率*/void Configurate(){EA = 0;Resetpaulse();//发出复位脉冲,每次操作都从复位开始Delay(1);Writebyte(0xcc); //skip room命令Writebyte(0x4e);Writebyte(0x7f);Writebyte(0x80);Writebyte(0x1f);EA = 1;}/*启动温度转换*/void StartConvert(){Resetpaulse(); // 发出复位脉冲,每次操作都从复位开始Delay(1);EA = 0;Writebyte(0xcc);//skip room命令Writebyte(0x44);//启动温度转换命令EA = 1;}/*读取温度值*/void ReadTempreture(){EA = 0;Resetpaulse();// 发出复位脉冲,每次操作都从复位开始Delay(1);Writebyte(0xcc);//skip room命令Writebyte(0xbe);//读取暂存器命令temp_l = Readbyte(); //存储温度低字节值(整数部分低四位和小数部分)temp_h = Readbyte(); //存储温度高字节值(其中高五位为符号位)EA = 1;}/*数据转换*/void DigitalConvert(){uchar total = 0;tempsign = (temp_h 〉> 7)& 0x01;//得出符号位if(tempsign == 0)//正数的处理方法{total = ((temp_h << 4)&0xf0)|((temp_l >〉4)&0x0f);//取整数位low_four = (temp_l>〉3)&0x01;//取小数位,9位分辨率,低字节第3位为小数位,只有0、1两种取值hundreds = total / 100;//计算百、十、个位tens = (total%100)/10;ones = (total%100)%10;}else //负数处理求负数补码规则是,按位取反,得到反码,加1即得补码(符号位不变){tempsign = 1;total = ((temp_l 〉〉4)& 0x0f);//取整数部分低4位total |= ((temp_h <〈4)& 0xf0);//整数部分高三位和符号位low_four = (temp_l 〉> 3) &0x01;//取小数位if(low_four == 0)//这里total位uchar型变量,所以根据最低位来确定整数取补规则total = ~total + 1;//最低位为0的时候,取反加1后有进位,所以这里total要取反加1elsetotal = ~total;//最低位为1的时候,取反加1没有进位,所以total直接取反即可tens = (total%100)/10;ones = (total%100)%10;}}/*中断处理*/void Display()interrupt 1{EA = 0;TL0 = MS2L;TH0 = MS2H;DigitalConvert();//数据转换if(tempsign == 0) //正数{if(k == 0){if(hundreds == 0) //高位0消隐{P1 = 0;}else{P1 = comm[k];SEG = seg[hundreds];}}else if(k == 1){if(tens == 0 && hundreds == 0)//高位0消隐{P1 = 0;}else{P1 = comm[k];SEG = seg[tens];}}else if(k == 2)//显示个位,因为个位有小数点,所以又定义了一个数组分开来显示{P1 = comm[k];SEG = seg_add_dicimal[ones]; //要加上小数点}else //显示小数,0或5{P1 = comm[k];SEG = seg_dicimal[low_four];}}else if(tempsign == 1) //负数{if(k == 0) //显示符号位{P1 = comm[k];SEG = 0xbf;}else if(k == 1){if(tens == 0){P1 = 0;}else{P1 = comm[k];SEG = seg[tens];}}else if(k == 2)//显示个位,因为各位有小数点,所以分开来显示{P1 = comm[k];SEG = seg_add_dicimal[ones]; //要加上小数点}else //显示小数,0或5{P1 = comm[k];SEG = seg_dicimal[low_four];}}k++;if(k == 4)k = 0;EA = 1;}/*主函数部分*/void main(){TMOD = 0x01;TL0 = MS2L;TH0 = MS2H;TF0 = 0;EA = 1;ET0 = 1;TR0 = 1;Configurate();do{Delay(1);StartConvert();Delay(100);ReadTempreture();}while(1);}。
c语言ntc查表法

C语言中的NTC查表法是一种常用的温度传感器数据处理方法。
NTC热敏电阻是一种常见的温度传感器,其电阻值随温度变化而变化。
通过测量电阻值,可以间接得到温度值。
但是,由于电阻值的变化范围很大,直接测量电阻值需要高精度的测量仪器,成本较高。
因此,使用查表法可以大大简化温度测量的过程,提高测量精度和效率。
查表法的基本原理是将电阻值与温度值的关系用表格的形式存储起来,通过查找表格中的对应值,就可以得到相应的温度值。
在C语言中,可以通过预先编写程序生成表格,并存储在文件中,在实际使用时,只需要读取文件中的数据即可。
以下是一个简单的C语言程序示例,用于实现NTC查表法:```c#include <stdio.h>#define NTC_NUM_SAMPLES 100 // NTC热敏电阻样本数量#define TEMP_RANGE 25 // 温度范围#define TABLE_SIZE (TEMP_RANGE + 1) // 表格大小// NTC热敏电阻样本数据float samples[NTC_NUM_SAMPLES] = { /* ... */ };// 查找表格中对应温度的值float find_temperature(float resistance) {for (int i = 0; i <= TEMP_RANGE; i++) {float sample = samples[i % NTC_NUM_SAMPLES];if (sample > resistance) {return i;}}return TEMP_RANGE; // 如果找不到对应的电阻值,返回最大温度值}int main() {// 读取NTC热敏电阻样本数据到数组中// ...// 读取温度值并查找对应的电阻值float temperature = 25.0; // 当前温度值float resistance = find_temperature(temperature);float actual_temperature = find_temperature(resistance); // 根据实际电阻值查找对应的温度值// 输出结果printf("Temperature: %.2f C\n", actual_temperature);return 0;}```在上述示例中,我们首先定义了NTC热敏电阻样本数量、温度范围和表格大小等参数。
温度控制的PID算法与C程序实现
温度控制的PID算法与C程序实现PID (Proportional-Integral-Derivative) 是一种经典的反馈控制算法,被广泛应用于温度控制中。
在温度控制中,PID算法可以根据实际温度与设定温度之间的差异来调整控制器的输出,以达到稳定的温度控制。
下面将介绍PID算法的原理及其在C程序中的实现。
PID算法是通过对三个控制参数的不同组合调整,来实现对控制系统的精确控制。
这三个参数分别是比例项(P),积分项(I)和微分项(D)。
比例项(P)是根据实际温度与设定温度的差异计算出来的,并且与这个差异成比例。
比例项主要用于对系统的快速响应进行调整。
如果比例项过大,可能会导致系统产生震荡,如果比例项过小,则可能导致控制系统响应迟缓。
积分项(I)用于校正持续的误差,通过对误差的积分来进行控制系统的调整。
积分项主要用于对系统的稳定性进行调整。
如果积分项过大,可能会导致系统产生超调和振荡,如果积分项过小,则可能导致系统无法快速地消除误差。
微分项(D)用于预测系统未来变化的趋势,并根据这个趋势来进行控制系统的调整。
微分项主要用于对系统的响应速度进行调整。
如果微分项过大,可能会导致系统产生过度的抖动,如果微分项过小,则可能导致系统响应迟缓。
PID算法的输出是三个控制参数的加权和,即 control = P * error + I * integral + D * derivative。
其中,error为实际温度与设定温度的差异,integral为误差的累积和,derivative为误差的变化率。
下面是一个使用PID算法实现温度控制的C程序的示例:```c#include <stdio.h>//PID参数float Kp = 0.5;float Ki = 0.2;float Kd = 0.1;//温度设定值float setpoint = 50.0;//初始化float errorSum = 0;float lastError = 0;//计算PID控制量float calculateOutput(float currentTemperature) float error = setpoint - currentTemperature; errorSum += error;//计算PID控制量float proportional = Kp * error;float integral = Ki * errorSum;float derivative = Kd * (error - lastError);float output = proportional + integral + derivative; lastError = error;return output;int mai//模拟当前温度float currentTemperature = 40.0;//模拟控制循环while (1)//获取温度传感器读数// float currentTemperature = readTemperature(;//计算PID控制量float controlOutput = calculateOutput(currentTemperature); //执行控制动作,例如根据控制量控制加热器或冷却器// executeControlAction(controlOutput);//模拟温度变化currentTemperature += 0.5;//输出当前温度和控制量printf("Current temperature: %.2f, Control output: %.2f\n", currentTemperature, controlOutput);}return 0;```上述C程序中,首先定义了PID参数Kp、Ki和Kd,以及温度设定值setpoint。
单片机控制的温度传感器C语言程序

EA = 1;
}
/*数据转换*/
void DigitalConvert()
{
uchar total = 0;
tempsign = (temp_h >> 7) & 0x01; //得出符号位
if(tempsign == 0)//正数的处理方法
{
uint i = 0;
bit b = 0;
DO = 0; //产生读时隙
i++;//维持低电平至少1us
DO = 1; //1us以上后拉高
Delayus(2); //延时8us,DO下降沿15内ds18b20输出的数据才有效
b = DO; //读取数据
Delayus(40);//每个读时隙至少持续60us
}
/*写一个字节*/
void Writebyte(uchar byte_to_write)
{
uchar i = 0;
uchar j = 0;
bit write_bit = 0;
for(j=0; j<8; j++)
{
write_bit =(byte_to_write & 0x01);
if(write_bit == 1) //写1
return(b);
}
/*读取一个字节*/
uchar Readbyte()
{
uchar byte_read = 0;
uchar i, j;ቤተ መጻሕፍቲ ባይዱ
for(i=0; i<8; i++)
{
j = Readbit();
基于ds18b20的温度计设计代码
基于DS18B20的温度计设计代码一、介绍DS18B20温度计DS18B20是一种数字温度传感器,由美国达拉斯半导体公司生产。
它采用单总线通信协议,并可以通过单总线接口进行多级串联。
DS18B20具有精度高、稳定性好、响应速度快等特点,因此在各种温度测量应用中被广泛使用。
二、DS18B20温度计设计代码在使用DS18B20温度传感器时,我们通常需要编写相应的代码来读取传感器的数据并进行温度计算。
以下是基于Arduino评台的DS18B20温度计设计代码:```c#include <OneWire.h>#include <DallasTemperature.h>#define ONE_WIRE_BUS 2 // 设置DS18B20数据线连接的Arduino 引脚OneWire oneWire(ONE_WIRE_BUS);DallasTemperature sensors(&oneWire);void setup() {Serial.begin(9600);sensors.begin();}void loop() {sensors.requestTemperatures(); // 发送获取温度命令float temperatureC = sensors.getTempCByIndex(0); // 获取温度值(摄氏度)float temperatureF = sensors.toFahrenheit(temperatureC); // 转换为华氏度Serial.print("Temperature: ");Serial.print(temperatureC);Serial.print("°C / ");Serial.print(temperatureF);Serial.println("°F");delay(1000); // 延时1s}```以上代码使用了OneWire库和DallasTemperature库来实现对DS18B20的温度测量。
模糊PID控制温控系统设计C语言程序代码

模糊PID控制温控系统设计C语言程序代码请注意,由于1200字的限制,下面的代码只是模糊PID控制温控系统的一个简单示例。
如果您需要更详细和完整的代码,请提供更多的细节和规格要求。
```c#include <stdio.h>//PID参数float kp = 0.5; // 比例系数float ki = 0.2; // 积分系数float kd = 0.1; // 微分系数//PID变量float integral = 0; // 积分累计float previous_error = 0; // 上一次的误差//温度传感器读取函数,返回当前温度float read_temperatur//实现温度传感器读取的代码逻辑//返回当前温度值//控制器输出函数,将控制信号发送给执行机构void control_output(float control_signal)//实现将控制信号发送给执行机构的代码逻辑int mai//设置设定温度float setpoint = 25.0;//主循环while (1)//获取当前温度float current_temperature = read_temperature(;//计算误差float error = setpoint - current_temperature;//计算PID控制信号float p_term = kp * error;integral += ki * error;float d_term = kd * (error - previous_error);float control_signal = p_term + integral + d_term; //更新上一次的误差previous_error = error;//输出控制信号control_output(control_signal);}return 0;```上述代码中,我们首先定义了PID参数和变量,以及温度传感器读取函数和控制器输出函数。
温度传感器18B20驱动程序(C语言)
//1楼主:温度传感器18B20驱动程序(C语言)/*************************************************************18B20驱动程序,DQ为数据口,接于P2.1*11.0592M晶振,上拉4.7k电阻*************************************************************/#define uchar unsigned char#define uint unsigned intsbit dq = P1^7;bit flag;uint Temperature;uchar temp_buff[9]; //存储读取的字节,read scratchpad为9字节,read rom ID为8字节uchar id_buff[8];uchar *p;uchar crc_data;uchar code CrcTable [256]={0, 94, 188, 226, 97, 63, 221, 131, 194, 156, 126, 32, 163, 253, 31, 65,157, 195, 33, 127, 252, 162, 64, 30, 95, 1, 227, 189, 62, 96, 130, 220,35, 125, 159, 193, 66, 28, 254, 160, 225, 191, 93, 3, 128, 222, 60, 98,190, 224, 2, 92, 223, 129, 99, 61, 124, 34, 192, 158, 29, 67, 161, 255,70, 24, 250, 164, 39, 121, 155, 197, 132, 218, 56, 102, 229, 187, 89, 7,219, 133, 103, 57, 186, 228, 6, 88, 25, 71, 165, 251, 120, 38, 196, 154,101, 59, 217, 135, 4, 90, 184, 230, 167, 249, 27, 69, 198, 152, 122, 36,248, 166, 68, 26, 153, 199, 37, 123, 58, 100, 134, 216, 91, 5, 231, 185,140, 210, 48, 110, 237, 179, 81, 15, 78, 16, 242, 172, 47, 113, 147, 205,17, 79, 173, 243, 112, 46, 204, 146, 211, 141, 111, 49, 178, 236, 14, 80,175, 241, 19, 77, 206, 144, 114, 44, 109, 51, 209, 143, 12, 82, 176,238,50, 108, 142, 208, 83, 13, 239, 177, 240, 174, 76, 18, 145, 207, 45, 115,202, 148, 118, 40, 171, 245, 23, 73, 8, 86, 180, 234, 105, 55, 213, 139,87, 9, 235, 181, 54, 104, 138, 212, 149, 203, 41, 119, 244, 170, 72, 22,233, 183, 85, 11, 136, 214, 52, 106, 43, 117, 151, 201, 74, 20, 246, 168,116, 42, 200, 150, 21, 75, 169, 247, 182, 232, 10, 84, 215, 137, 107, 53};///*************************************************************Function:延时处理*parameter:*Return:*Modify:*************************************************************/void TempDelay (uchar us){while(us--);}/*************************************************************Function:18B20初始化*parameter:*Return:*Modify:*************************************************************/void Init18b20 (void){dq=1;_nop_();dq=0;TempDelay(86); //delay 530 uS//80_nop_();dq=1;TempDelay(14); //delay 100 uS//14_nop_();_nop_();_nop_();if(dq==0)flag = 1; //detect 1820 success!elseflag = 0; //detect 1820 fail!TempDelay(20); //20_nop_();_nop_();dq = 1;}/************************************************************ *Function:向18B20写入一个字节*parameter:*Return:*Modify:*************************************************************/ void WriteByte (uchar wr) //单字节写入{uchar i;for (i=0;i<8;i++){dq = 0;_nop_();dq=wr&0x01;TempDelay(5); //delay 45 uS //5_nop_();_nop_();dq=1;wr >>= 1;}}/************************************************************ *Function:读18B20的一个字节*parameter:*Return:*Modify:*************************************************************/ uchar ReadByte (void) //读取单字节{uchar i,u=0;for(i=0;i<8;i++){dq = 0;u >>= 1;dq = 1;if(dq==1)u |= 0x80;TempDelay (4);_nop_();}return(u);}/************************************************************ *Function:读18B20*parameter:*Return:*Modify:*************************************************************/ void read_bytes (uchar j){uchar i;for(i=0;i {*p = ReadByte();p++;}}/************************************************************ *Function:CRC校验*parameter:*Return:*Modify:*************************************************************/ uchar CRC (uchar j){uchar i,crc_data=0;for(i=0;i crc_data = CrcTable[crc_data^temp_buff[i]]; return (crc_data);}/************************************************************ *Function:读取温度*parameter:*Return:*Modify:*************************************************************/ void GemTemp (void){read_bytes (9);if (CRC(9)==0) //校验正确{Temperature = temp_buff[1]*0x100 + temp_buff[0];// Temperature *= 0.625;Temperature /= 16;TempDelay(1);}}/************************************************************ *Function:内部配置*parameter:*Return:*Modify:*************************************************************/ void Config18b20 (void) //重新配置报警限定值和分辨率{Init18b20();WriteByte(0xcc); //skip romWriteByte(0x4e); //write scratchpadWriteByte(0x19); //上限WriteByte(0x1a); //下限WriteByte(0x7f); //set 11 bit (0.125)Init18b20();WriteByte(0xcc); //skip romWriteByte(0x48); //保存设定值Init18b20();WriteByte(0xcc); //skip romWriteByte(0xb8); //回调设定值}/************************************************************ *Function:读18B20ID*parameter:*Return:*Modify:*************************************************************/ void ReadID (void)//读取器件 id{Init18b20();WriteByte(0x33); //read romread_bytes(8);}/************************************************************ *Function:18B20ID全处理*parameter:*Return:*Modify:*************************************************************/ void TemperatuerResult(void){p = id_buff;ReadID();Config18b20();Init18b20 ();WriteByte(0xcc); //skip romWriteByte(0x44); //Temperature convertInit18b20 ();WriteByte(0xcc); //skip romWriteByte(0xbe); //read Temperaturep = temp_buff;GemTemp();}/*急什么?急着买吗?还是要程序?我给你提供一段吧!也是网友写的。
中学信息技术练习题——程序设计、人工智能、物联网及新技术
中学信息技术练习题——程序设计、人工智能、物联网及新技术一、单选题13 ()是机器人的“灵魂”,机器人要做的任何动作都由程序决定。
A.程序(正确答案)B.外观C.材料D.重量62 不属于计算机算法的特征的是()A.传递性(正确答案)B.有穷性C.确定性D.可行性125 属于程序设计语言的是()。
A.QQB.LinuxC.Python(正确答案)D.windows209 在Python中,乘法的运算符用()代表。
A.XB.*(正确答案)C.#D.%1 在Python中,乘法的运算符用()代表。
A.XB.*(正确答案)C.#D.%2 在Python中,类型转换函数int(x)的作用是().A.将x转换成整型(正确答案)B.将x转换成浮点型C.将x转换成字符串D.将x转换成布尔型3 在Python中,循环结构的实现是利用()语句。
A.in语句B.while语句(正确答案)C.if语句D.and语句97 利用计算机来模仿人的智能,进行推理和决策的思维过程称为().A.数据处理B.自动控制C.计算机辅助系统D.人工智能(正确答案)232长期以来,人类一直梦想着能制造出具有智能的机器。
()年“人工智能”概念首次出现。
A.1956(正确答案)B.2001C.2018D.19004()就是“万物相连的互联网"(InternetofThings),它是在互联网的基础上,通过无线传感技术,实现人与物、物与物之间连接的系统A.物联网(正确答案)B.互联网C.局域网D.城域网11 ()使得任何人或物可以在任何时间、地点都可以接入互联网。
A.虚拟网B.物联网(正确答案)C.局域网D.主干网98 利用网络为教师和学生提供教育资源的平台,我们称之为()A.云存储B.云物联C.云教育(正确答案)D.云音乐195 游览故宫博物馆中带VR场景的宫殿或建筑需配戴()设备。
A.虚拟现实眼镜(正确答案)B.防滑眼镜C.透明眼镜D.防摔眼镜185 以教育机器人为例,其中的控制器或主板相当于人类的()A.大脑(正确答案)B.感官C.肢体D.皮肤186 以教育机器人为例,其中的声音传感器相当于人类的()A.大脑B.耳朵(正确答案)C.肢体D.皮肤5()具有车辆监控调度、车载终端、电子站牌和通信网络等功能模块,可实现各车次到站时间等信息的实时发布,为市民乘车选择和公交监控管理提供实时的公交到站信息。
C语言以温度测量为主的多功能任务设计
《单片机原理及应用课程设计任务》班级学号学生姓名指导教师淮阴工学院电子与电气工程学院2014-5目录一、课程设计目的 (3)二、设计要求 (3)2.1总体要求 (3)2.2 具体要求 (4)三、设计内容及方法 (5)3.1设计准备 (5)3.2功能设计及系统总体设计 (5)四、硬件电路总体设计 (5)4.1 硬件总框图 (5)4.1.1 主控电路 (6)4.1.2 按键控制扫描模块 (6)4.1.3 DS1820温度显示模块 (7)4.1.4 数码管显示模块 (7)4.1.5 LED显示模块 (8)4.1.6 扬声器模块 (9)五、软件流程框图 (11)六、完整的程序清单及注释 (14)七、设计总结 (23)八、参考文献 (23)一、课程设计目的《单片机原理及应用》课程设计是一项重要的实践性教育环节,是学生在校期间必须接受的一项工程训练。
在课程设计过程中,在教师指导下,运用工程的方法,通过一个简单课题的设计练习,可使学生通过综合的系统设计,熟悉应用系统的设计过程、设计要求、完成的工作内容和具体的设计方法,了解必须提交的各项工程文件,也达到巩固、充实和综合运用所学知识解决实际问题的目的。
通过课程设计,应能加强学生如下能力的培养:(1)独立工作能力和创造力;(2)综合运用专业及基础知识,解决实际工程技术问题的能力;(3)查阅图书资料、产品手册和各种工具书的能力;(4)工程绘图的能力;(5)编写技术报告和编制技术资料的能力。
二、设计要求2.1总体要求(1) 独立完成设计任务(2) 绘制系统硬件总框图(3) 绘制系统原理电路图(4) 制定编写设计方案,编制软件框图,完成详细完整的程序清单和注释;(5) 制定编写调试方案,编写用户操作使用说明书(6) 写出设计工作小结。
对在完成以上文件过程所进行的有关步骤如设计思想、指标论证、方案确定、参数计算、元器件选择、原理分析等作出说明,并对所完成的设计作出评价,对自己整个设计工作中经验教训,2.2 具体要求本次工程实践主要以单片机为基础,进行单片机软件编程,目的是为了提高学生的软件编程和系统设计能力,整个设计系统包括两个部分,硬件及软件部分,硬件部分已经制作成功,学生可以对硬件模块电路进行分析调试,在此基础上,编写模块软件,并进行仿真调试,最后各模块组织一个多功能任务系统,进行系统软件总体调试,实现设计任务要求。
温度传感器C代码

#inclu de<re g52.h>#de fineuchar unsi gnedchar#defi ne ui nt un signe d intsbit DQ=P2^0;//ds18b20与单片机连接口sbit RS=P1^0;sbitRW=P1^1;s bit E N=P1^2;un signe d cha r cod e str1[]={"temp eratu re: "};un signe d cha r cod e str2[]={" "};u chardatadisda ta[5];uin t tva lue;//温度值uchar tfla g;//温度正负标志/*************************lcd1602程序**************************/ v oid d elay1ms(un signe d int ms)//延时1毫秒(不够精确的){unsig ned i nt i,j; for(i=0;i<ms;i++) fo r(j=0;j<100;j++);}voidwr_co m(uns igned char com)//写指令//{delay1ms(1); RS=0;RW=0;E N=0;P0=com;d elay1ms(1);EN=1;d elay1ms(1);EN=0;}vo id wr_dat(unsig ned c har d at)//写数据//{ del ay1ms(1);RS=1; RW=0; EN=0;P0=da t; dela y1ms(1); EN=1; dela y1ms(1); EN=0;}voidlcd_i nit()//初始化设置//{delay1ms(15); wr_com(0x38);delay1ms(5); wr_c om(0x08);d elay1ms(5);wr_co m(0x01);de lay1m s(5);w r_com(0x06);del ay1ms(5);wr_com(0x0c);dela y1ms(5);}void disp lay(u nsign ed ch ar *p)//显示//{while(*p!='\0'){wr_dat(*p);p++;delay1ms(1);}}ini t_pla y()//初始化显示{ lc d_ini t();w r_com(0x80);di splay(str1);wr_com(0x80+0x40);dis play(str2);}/******************************ds1820程序***************************************/ voi d del ay_18B20(u nsign ed in t i)//延时1微秒{ whi le(i--);}void ds1820rst()/*d s1820复位*/{ unsi gnedcharx=0;DQ = 1;//DQ复位delay_18B20(4); //延时D Q = 0; //DQ拉低 dela y_18B20(100); //精确延时大于480us DQ = 1; //拉高delay_18B20(40);}uchar ds1820rd()/*读数据*/{ uns igned char i=0;u nsign ed ch ar da t = 0;for (i=8;i>0;i--){ D Q = 0; //给脉冲信号d at>>=1;//右移 DQ = 1; //给脉冲信号 if(D Q) dat|=0x80; //或 del ay_18B20(10);}r eturn(dat);}v oid d s1820wr(uc har w data)/*写数据*/{u nsign ed ch ar i=0; for (i=8; i>0; i--){ DQ= 0;DQ =wdata&0x01; del ay_18B20(10);D Q = 1; wda ta>>=1; }}read_temp()/*读取温度值并转换*/{uchar a,b;ds1820rst(); ds1820wr(0xcc);//*跳过读序列号*/d s1820wr(0x44);//*启动温度转换*/ds1820rst(); ds1820wr(0xcc);//*跳过读序列号*/d s1820wr(0x be);//*读取温度*/a=ds1820rd();b=ds1820rd();tva lue=b;tva lue<<=8;t value=tval ue|a;if(tv alue<0x0ff f) tfla g=0;e lse {tv alue=~tval ue+1;tfla g=1;}tvalu e=tva lue*(0.625);//温度值扩大10倍,精确到1位小数retu rn(tv alue);}/*******************************************************************/ voi d ds1820di sp()//温度值显示{ u charflagd at; dis data[0]=tv alue/1000+0x30;//百位数 disd ata[1]=tva lue%1000/100+0x30;//十位数d isdat a[2]=tvalu e%100/10+0x30;//个位数disda ta[3]=tval ue%10+0x30;//小数位 if(t flag==0)f lagda t=0x20;//正温度不显示符号 el seflagd at=0x2d;//负温度显示负号:-if(di sdata[0]==0x30){disd ata[0]=0x20;//如果百位为0,不显示if(disd ata[1]==0x30) {d isdat a[1]=0x20;//如果百位为0,十位为0也不显示 } } wr_com(0xc0);wr_da t(fla gdat);//显示符号位 wr_com(0xc1); wr_d at(di sdata[0]);//显示百位 wr_c om(0x c2);w r_dat(disd ata[1]);//显示十位w r_com(0xc3); wr_dat(d isdat a[2]);//显示个位 wr_com(0xc4);wr_da t(0x2e);//显示小数点wr_co m(0xc5); wr_dat(disda ta[3]);//显示小数位}/********************主程序***********************************/ void main(){init_play();//初始化显示wh ile(1){re ad_te mp();//读取温度 ds1820dis p();//显示}}。
DS18B20数字温度计C程序(能显示负温)
DS18B20数字温度计C程序(能显示负温)DS18B20数字温度计C程序(能显示负温)//***********DS18B20数字温度计C程序****************// //*MCU: AT892051 ////*MCU-crystal: 12M ////*Version: 01 ////*Last Updata: 2007-6-10 ////*Author: zhaojun ////*Description: ////DS18B20的读写程序,数据脚P3.4 ////温度传感器18B20汇编程序,采用器件默认的12位转化 // //最大转化时间750微秒,显示温度-55到+125度,显示精度 // //为0.1度,显示采用4位LED共阳显示测温值 ////P1口为段码输入,P0~P3为位选 ///***************************************************/#include "reg51.h"#include "intrins.h" //_nop_();延时函数用#define Disdata P1 //段码输出口#define discan P3 //扫描口#define uchar unsigned char#define uint unsigned intsbit DQ=P3^4; //温度输入口sbit DIN=P1^7; //LED小数点控制uint h;uint temp;//////**************温度小数部分用查表法***********//uchar code ditab[16]={0x00,0x01,0x01,0x02,0x03,0x03,0x04,0x04,0x05,0x06,0x06,0 x07,0x08,0x08,0x09,0x09};//uchar code dis_7[12]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0 xff,0xbf};//共阳LED段码表 "0" "1" "2" "3" "4" "5" "6" "7" "8" "9" "不亮" "-"uchar code scan_con[4]={0xfe,0xfd,0xfb,0xf7}; //列扫描控制字uchar data temp_data[2]={0x00,0x00}; //读出温度暂放uchar data display[5]={0x00,0x00,0x00,0x00,0x00}; //显示单元数据,共4个数据和一个运算暂用///////*****************11us延时函数*************************///void delay(uint t){for (;t>0;t--);}///****************显示扫描函数***************************/scan(){char k;for(k=0;k<4;k++) //4位LED扫描控制Disdata=dis_7[display[k]]; //数据显示if (k==1){DIN=0;} //小数点显示discan=scan_con[k]; //位选delay(300);}}/////****************DS18B20复位函数************************/ ow_reset(void){char presence=1;while(presence){while(presence){DQ=1;_nop_();_nop_();//从高拉倒低DQ=0;delay(50); //550 usDQ=1;delay(6); //66 uspresence=DQ; //presence=0 复位成功,继续下一步}delay(45); //延时500 uspresence=~DQ;}DQ=1; //拉高电平}///****************DS18B20写命令函数************************/ //向1-WIRE 总线上写1个字节void write_byte(uchar val){uchar i;for(i=8;i>0;i--){DQ=1;_nop_();_nop_(); //从高拉倒低DQ=0;_nop_();_nop_();_nop_();_nop_(); //5 usDQ=val&0x01; //最低位移出delay(6); //66 usval=val/2; //右移1位}DQ=1;delay(1);}///****************DS18B20读1字节函数************************///从总线上取1个字节uchar read_byte(void){uchar i;uchar value=0;for(i=8;i>0;i--){DQ=1;_nop_();_nop_();value>>=1;DQ=0;_nop_();_nop_();_nop_();_nop_(); //4 usDQ=1;_nop_();_nop_();_nop_();_nop_(); //4 usif(DQ)value|=0x80;delay(6); //66 us}DQ=1;return(value);}///****************读出温度函数************************///read_temp(){ow_reset(); //总线复位delay(200);write_byte(0xcc); //发命令write_byte(0x44); //发转换命令ow_reset();delay(1);write_byte(0xcc); //发命令write_byte(0xbe);temp_data[0]=read_byte(); //读温度值的第字节temp_data[1]=read_byte(); //读温度值的高字节temp=temp_data[1];temp<<=8;temp=temp|temp_data[0]; // 两字节合成一个整型变量。
c语言 温度传感器补偿算法

在C语言中,实现温度传感器补偿算法需要使用温度传感器读取温度值,然后根据补偿算法对温度值进行修正。
以下是一个简单的示例代码,演示如何使用C语言实现温度传感器补偿算法:```c#include <stdio.h>// 定义温度传感器读取函数float read_temperature() {// 在这里实现温度传感器的读取逻辑// 返回读取的温度值}// 定义温度补偿函数float compensate_temperature(float temperature) {// 在这里实现温度补偿逻辑// 返回补偿后的温度值}int main() {float temperature = read_temperature(); // 读取温度值float compensated_temperature = compensate_temperature(temperature); // 补偿温度值printf("原始温度值:%f\n", temperature);printf("补偿后温度值:%f\n", compensated_temperature);return 0;}```在上面的代码中,我们首先定义了一个`read_temperature`函数,用于从温度传感器中读取温度值。
在这个函数中,我们需要根据具体使用的温度传感器来实现读取逻辑。
然后,我们定义了一个`compensate_temperature`函数,用于对读取的温度值进行补偿。
在这个函数中,我们需要根据具体的补偿算法来实现补偿逻辑。
最后,在`main`函数中,我们调用`read_temperature`函数读取温度值,并调用`compensate_temperature`函数对温度值进行补偿。
最后,我们输出原始温度值和补偿后的温度值。
需要注意的是,在实际应用中,温度传感器的读取和补偿算法的实现可能更加复杂,需要根据具体的使用场景和要求来实现。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
void tempchange(void);
uint get_temp();
void delay(uint z);
void write_com(uchar com);
void write_data(uchar date);
sbit ds=P2^2; //温度传感器信号线
P0=date;
delay(5);
lcden=1;
delay(5);
lcden=0;
}
void initlcd()
{dula=0;
wela=0;
lcden=0;
write_com(0x38);
write_com(0x0c);
write_com(0x06);
{ uint i;
uchar j;
bit testb;
for(j=1;j<=8;j++)
{ testb=dat&0x01;
dat=dat>>1;
if(testb) //写 1
{ ds=0;
i++;i++;
ds=1;
for(i=1;i<=8;i++)
{ j=tempreadbit();
dat=(j<<7)|(dat>>1);//读出的数据最低位在最前面,这样刚好一个字节在DAT里
}
return(dat);
}
void tempwritebyte(uchar dat)//向18B20写一个字节数据
write_com(0x01);
}
void main()
{ uint kk,bb,ss,gg;
uint tempdata;
uchar num;
initlcd();
dsreset();
while(1)
{ tempchange();
tempdata=get_temp();
return temp;
}
void write_com(uchar com)
{lcdrs=0;
P0=com;
delay(5);
lcden=1;
delay(5);
lcden=0;
}
void write_data(uchar date)
{lcdrs=1;
i=8;
while(i>0)i--;
}
else
{ ds=0; //写 0
i=8;
while(i>0)i--;
ds=1;
i++;i++;
}
}
}
void tempchange(void) //DS18B20 开始获取温度并转换
{write_data(table[num]);
delay(5);
}
write_data(kk+0x30);
write_data(bb+0x30);
write_data(ss+0x30);
write_data('.');
i=103;
while(i>0)i--;
ds=1;
i=4;
while(i>0)i--;
_nop_();
_nop_();
ds=1;
}
bit tempreadbit(void) //读1位函数
{ uint i;
bit dat;
ds=0;
void delay(uint z)//延时函数
{uint x,y;
for(x=z;x>0;x--)
for(y=110;y>0;y--);
}
void dsreset(void)//18B20复位,初始化函数 {ຫໍສະໝຸດ uint i; ds=1;
_nop_();
ds=0;
write_data(gg+0x30);
delay(500);
}
}
sbit lcden=P3^4;
sbit lcdrs=P3^5;
sbit beep=P2^3; //蜂鸣器
sbit dula=P2^6;
sbit wela=P2^7;
uint temp;
uchar tflag;
float f_temp;
uchar code table[]="temp:";
dsreset();
delay(1);
tempwritebyte(0xcc);
tempwritebyte(0xbe);
a=tempread(); //读低8位
b=tempread(); //读高8位
temp=b;
temp<<=8; //两个字节组合为1个字
#include<reg52.h>
#include <intrins.h>
#define uchar unsigned char
#define uint unsigned int
void dsreset(void);
bit tempreadbit(void);
uchar tempread(void);
temp=temp|a;
if(temp<=0x0fff)
tflag=1;
else
{temp=~temp+1;
tflag=-1;
}
f_temp=temp*0.0625;
temp=f_temp*10+0.5;
temp=temp*tflag;
i++; //i++ 起延时作用
ds=1;
i++;i++;
dat=ds;
i=8;
while(i>0)i--;
return (dat);
}
uchar tempread(void)//读1个字节
{ uchar i,j,dat;
dat=0;
{ dsreset();
delay(1);
tempwritebyte(0xcc); // 写跳过读ROM指令
tempwritebyte(0x44); // 写温度转换指令
}
uint get_temp() //读取寄存器中存储的温度数据
{ uchar a,b;
kk=tempdata/1000;
bb=tempdata%1000/100;
ss=tempdata%100/10;
gg=tempdata%10;
write_com(0x80);
for(num=0;num<5;num++)