CPS_V1.0.0 (Cycling Power Service)
噢易维护系统-变量版使用手册(印刷版)
聲明歡迎使用噢易科技產品,在使用產品之前,請首先閱讀本使用手冊。
本手冊適用于噢易維護系統-變量版和噢易保護卡版本。
本手冊由武漢噢易科技有限公司製作。
未經噢易科技許可,不得以任何目的而使用任何形式的複製或傳播本手冊的任何部分。
武漢噢易科技有限公司有權更改本手冊的內容,如手冊內容與實際產品不符,以實際產品為准,恕不另行通知!武漢噢易科技有限公司對於產品、應用程式、版權和其中涵蓋的其他知識產權擁有專利,若無噢易科技的書面授權,不得擅用。
本手冊中所提到的某些產品名稱僅作識別之用,這些名稱可能屬於其他公司的注冊商標或版權!目錄使用手冊閱讀導航 (4)第一章產品介紹 (5)1、產品說明 (5)2、產品規格 (5)3、產品特色 (6)4、系統需求 (7)5、硬體安裝 (7)6、安裝流程圖 (8)第二章在單機或網路中的第一部電腦上進行安裝 (9)1、在本機已經安裝作業系統情況下的安裝步驟 (11)2、在本機無作業系統或需要安裝多作業系統時的安裝 (11)3、在作業系統中安裝驅動程式 (16)4、系統的優化 (19)第三章網路安裝與網路複製 (20)1、進入網路複製 (20)2、進入接收端 (21)3、設置佔位機 (21)4、分組 (22)5、發送資料、命令和修改IP (23)6、中斷點續傳(不適用于噢易保護卡) (28)第四章設置 (30)1、密碼設定 (30)2、參數設定 (31)3、分區信息 (34)4、網路複製 (35)5、重新分區 (35)6、版本升級 (35)7、移除 (36)8、關於 (37)9.計費擴展 (38)第五章變量複製(不適用于噢易保護卡) (40)1、首先根據需要在一部機器上進行操作 (40)2、進入發射端 (41)3、部分變量和全部變量 (41)4、變量複製 (42)附錄一、LINUX安裝指南 (43)附錄二、常見問題解答 (47)使用手冊閱讀導航歡迎使用噢易科技產品,在使用產品之前,請首先閱讀本使用手冊。
驱动模块详细介绍

6.4
参数调整图 ......................................................................................................................... 51
6.5
数据显示列表...................................................................................................................... 52
Siemens AG Industry Sector Postfach 48 48 90026 NÜRNBERG 德国
6SL3097-0AS00-0RP0 Ⓟ 04/2009
Copyright © Siemens AG 2009. 本公司保留技术更改的权利
前言
手册用途 技术支持
手册指南
本手册为用户提供有关正确安装、连接、调试、操作以及检修 SINAMICS V60 伺服驱动 系统的信息。
机械安装............................................................................................................................. 27 安装驱动............................................................................................................................. 27 安装电机............................................................................................................................. 31
Indradrive 系列 故障代码

Error MessagesF9001 Error internal function call.F9002 Error internal RTOS function callF9003 WatchdogF9004 Hardware trapF8000 Fatal hardware errorF8010 Autom. commutation: Max. motion range when moving back F8011 Commutation offset could not be determinedF8012 Autom. commutation: Max. motion rangeF8013 Automatic commutation: Current too lowF8014 Automatic commutation: OvercurrentF8015 Automatic commutation: TimeoutF8016 Automatic commutation: Iteration without resultF8017 Automatic commutation: Incorrect commutation adjustment F8018 Device overtemperature shutdownF8022 Enc. 1: Enc. signals incorr. (can be cleared in ph. 2) F8023 Error mechanical link of encoder or motor connectionF8025 Overvoltage in power sectionF8027 Safe torque off while drive enabledF8028 Overcurrent in power sectionF8030 Safe stop 1 while drive enabledF8042 Encoder 2 error: Signal amplitude incorrectF8057 Device overload shutdownF8060 Overcurrent in power sectionF8064 Interruption of motor phaseF8067 Synchronization PWM-Timer wrongF8069 +/-15Volt DC errorF8070 +24Volt DC errorF8076 Error in error angle loopF8078 Speed loop error.F8079 Velocity limit value exceededF8091 Power section defectiveF8100 Error when initializing the parameter handlingF8102 Error when initializing power sectionF8118 Invalid power section/firmware combinationF8120 Invalid control section/firmware combinationF8122 Control section defectiveF8129 Incorrect optional module firmwareF8130 Firmware of option 2 of safety technology defectiveF8133 Error when checking interrupting circuitsF8134 SBS: Fatal errorF8135 SMD: Velocity exceededF8140 Fatal CCD error.F8201 Safety command for basic initialization incorrectF8203 Safety technology configuration parameter invalidF8813 Connection error mains chokeF8830 Power section errorF8838 Overcurrent external braking resistorF7010 Safely-limited increment exceededF7011 Safely-monitored position, exceeded in pos. DirectionF7012 Safely-monitored position, exceeded in neg. DirectionF7013 Safely-limited speed exceededF7020 Safe maximum speed exceededF7021 Safely-limited position exceededF7030 Position window Safe stop 2 exceededF7031 Incorrect direction of motionF7040 Validation error parameterized - effective thresholdF7041 Actual position value validation errorF7042 Validation error of safe operation modeF7043 Error of output stage interlockF7050 Time for stopping process exceeded8.3.15 F7051 Safely-monitored deceleration exceeded (159)8.4 Travel Range Errors (F6xxx) (161)8.4.1 Behavior in the Case of Travel Range Errors (161)8.4.2 F6010 PLC Runtime Error (162)8.4.3 F6024 Maximum braking time exceeded (163)8.4.4 F6028 Position limit value exceeded (overflow) (164)8.4.5 F6029 Positive position limit exceeded (164)8.4.6 F6030 Negative position limit exceeded (165)8.4.7 F6034 Emergency-Stop (166)8.4.8 F6042 Both travel range limit switches activated (167)8.4.9 F6043 Positive travel range limit switch activated (167)8.4.10 F6044 Negative travel range limit switch activated (168)8.4.11 F6140 CCD slave error (emergency halt) (169)8.5 Interface Errors (F4xxx) (169)8.5.1 Behavior in the Case of Interface Errors (169)8.5.2 F4001 Sync telegram failure (170)8.5.3 F4002 RTD telegram failure (171)8.5.4 F4003 Invalid communication phase shutdown (172)8.5.5 F4004 Error during phase progression (172)8.5.6 F4005 Error during phase regression (173)8.5.7 F4006 Phase switching without ready signal (173)8.5.8 F4009 Bus failure (173)8.5.9 F4012 Incorrect I/O length (175)8.5.10 F4016 PLC double real-time channel failure (176)8.5.11 F4017 S-III: Incorrect sequence during phase switch (176)8.5.12 F4034 Emergency-Stop (177)8.5.13 F4140 CCD communication error (178)8.6 Non-Fatal Safety Technology Errors (F3xxx) (178)8.6.1 Behavior in the Case of Non-Fatal Safety Technology Errors (178)8.6.2 F3111 Refer. missing when selecting safety related end pos (179)8.6.3 F3112 Safe reference missing (179)8.6.4 F3115 Brake check time interval exceeded (181)Troubleshooting Guide | Rexroth IndraDrive Electric Drivesand ControlsI Bosch Rexroth AG VII/XXIITable of ContentsPage8.6.5 F3116 Nominal load torque of holding system exceeded (182)8.6.6 F3117 Actual position values validation error (182)8.6.7 F3122 SBS: System error (183)8.6.8 F3123 SBS: Brake check missing (184)8.6.9 F3130 Error when checking input signals (185)8.6.10 F3131 Error when checking acknowledgment signal (185)8.6.11 F3132 Error when checking diagnostic output signal (186)8.6.12 F3133 Error when checking interrupting circuits (187)8.6.13 F3134 Dynamization time interval incorrect (188)8.6.14 F3135 Dynamization pulse width incorrect (189)8.6.15 F3140 Safety parameters validation error (192)8.6.16 F3141 Selection validation error (192)8.6.17 F3142 Activation time of enabling control exceeded (193)8.6.18 F3143 Safety command for clearing errors incorrect (194)8.6.19 F3144 Incorrect safety configuration (195)8.6.20 F3145 Error when unlocking the safety door (196)8.6.21 F3146 System error channel 2 (197)8.6.22 F3147 System error channel 1 (198)8.6.23 F3150 Safety command for system start incorrect (199)8.6.24 F3151 Safety command for system halt incorrect (200)8.6.25 F3152 Incorrect backup of safety technology data (201)8.6.26 F3160 Communication error of safe communication (202)8.7 Non-Fatal Errors (F2xxx) (202)8.7.1 Behavior in the Case of Non-Fatal Errors (202)8.7.2 F2002 Encoder assignment not allowed for synchronization (203)8.7.3 F2003 Motion step skipped (203)8.7.4 F2004 Error in MotionProfile (204)8.7.5 F2005 Cam table invalid (205)8.7.6 F2006 MMC was removed (206)8.7.7 F2007 Switching to non-initialized operation mode (206)8.7.8 F2008 RL The motor type has changed (207)8.7.9 F2009 PL Load parameter default values (208)8.7.10 F2010 Error when initializing digital I/O (-> S-0-0423) (209)8.7.11 F2011 PLC - Error no. 1 (210)8.7.12 F2012 PLC - Error no. 2 (210)8.7.13 F2013 PLC - Error no. 3 (211)8.7.14 F2014 PLC - Error no. 4 (211)8.7.15 F2018 Device overtemperature shutdown (211)8.7.16 F2019 Motor overtemperature shutdown (212)8.7.17 F2021 Motor temperature monitor defective (213)8.7.18 F2022 Device temperature monitor defective (214)8.7.19 F2025 Drive not ready for control (214)8.7.20 F2026 Undervoltage in power section (215)8.7.21 F2027 Excessive oscillation in DC bus (216)8.7.22 F2028 Excessive deviation (216)8.7.23 F2031 Encoder 1 error: Signal amplitude incorrect (217)VIII/XXII Bosch Rexroth AG | Electric Drivesand ControlsRexroth IndraDrive | Troubleshooting GuideTable of ContentsPage8.7.24 F2032 Validation error during commutation fine adjustment (217)8.7.25 F2033 External power supply X10 error (218)8.7.26 F2036 Excessive position feedback difference (219)8.7.27 F2037 Excessive position command difference (220)8.7.28 F2039 Maximum acceleration exceeded (220)8.7.29 F2040 Device overtemperature 2 shutdown (221)8.7.30 F2042 Encoder 2: Encoder signals incorrect (222)8.7.31 F2043 Measuring encoder: Encoder signals incorrect (222)8.7.32 F2044 External power supply X15 error (223)8.7.33 F2048 Low battery voltage (224)8.7.34 F2050 Overflow of target position preset memory (225)8.7.35 F2051 No sequential block in target position preset memory (225)8.7.36 F2053 Incr. encoder emulator: Pulse frequency too high (226)8.7.37 F2054 Incr. encoder emulator: Hardware error (226)8.7.38 F2055 External power supply dig. I/O error (227)8.7.39 F2057 Target position out of travel range (227)8.7.40 F2058 Internal overflow by positioning input (228)8.7.41 F2059 Incorrect command value direction when positioning (229)8.7.42 F2063 Internal overflow master axis generator (230)8.7.43 F2064 Incorrect cmd value direction master axis generator (230)8.7.44 F2067 Synchronization to master communication incorrect (231)8.7.45 F2068 Brake error (231)8.7.46 F2069 Error when releasing the motor holding brake (232)8.7.47 F2074 Actual pos. value 1 outside absolute encoder window (232)8.7.48 F2075 Actual pos. value 2 outside absolute encoder window (233)8.7.49 F2076 Actual pos. value 3 outside absolute encoder window (234)8.7.50 F2077 Current measurement trim wrong (235)8.7.51 F2086 Error supply module (236)8.7.52 F2087 Module group communication error (236)8.7.53 F2100 Incorrect access to command value memory (237)8.7.54 F2101 It was impossible to address MMC (237)8.7.55 F2102 It was impossible to address I2C memory (238)8.7.56 F2103 It was impossible to address EnDat memory (238)8.7.57 F2104 Commutation offset invalid (239)8.7.58 F2105 It was impossible to address Hiperface memory (239)8.7.59 F2110 Error in non-cyclical data communic. of power section (240)8.7.60 F2120 MMC: Defective or missing, replace (240)8.7.61 F2121 MMC: Incorrect data or file, create correctly (241)8.7.62 F2122 MMC: Incorrect IBF file, correct it (241)8.7.63 F2123 Retain data backup impossible (242)8.7.64 F2124 MMC: Saving too slowly, replace (243)8.7.65 F2130 Error comfort control panel (243)8.7.66 F2140 CCD slave error (243)8.7.67 F2150 MLD motion function block error (244)8.7.68 F2174 Loss of motor encoder reference (244)8.7.69 F2175 Loss of optional encoder reference (245)Troubleshooting Guide | Rexroth IndraDrive Electric Drivesand Controls| Bosch Rexroth AG IX/XXIITable of ContentsPage8.7.70 F2176 Loss of measuring encoder reference (246)8.7.71 F2177 Modulo limitation error of motor encoder (246)8.7.72 F2178 Modulo limitation error of optional encoder (247)8.7.73 F2179 Modulo limitation error of measuring encoder (247)8.7.74 F2190 Incorrect Ethernet configuration (248)8.7.75 F2260 Command current limit shutoff (249)8.7.76 F2270 Analog input 1 or 2, wire break (249)8.7.77 F2802 PLL is not synchronized (250)8.7.78 F2814 Undervoltage in mains (250)8.7.79 F2815 Overvoltage in mains (251)8.7.80 F2816 Softstart fault power supply unit (251)8.7.81 F2817 Overvoltage in power section (251)8.7.82 F2818 Phase failure (252)8.7.83 F2819 Mains failure (253)8.7.84 F2820 Braking resistor overload (253)8.7.85 F2821 Error in control of braking resistor (254)8.7.86 F2825 Switch-on threshold braking resistor too low (255)8.7.87 F2833 Ground fault in motor line (255)8.7.88 F2834 Contactor control error (256)8.7.89 F2835 Mains contactor wiring error (256)8.7.90 F2836 DC bus balancing monitor error (257)8.7.91 F2837 Contactor monitoring error (257)8.7.92 F2840 Error supply shutdown (257)8.7.93 F2860 Overcurrent in mains-side power section (258)8.7.94 F2890 Invalid device code (259)8.7.95 F2891 Incorrect interrupt timing (259)8.7.96 F2892 Hardware variant not supported (259)8.8 SERCOS Error Codes / Error Messages of Serial Communication (259)9 Warnings (Exxxx) (263)9.1 Fatal Warnings (E8xxx) (263)9.1.1 Behavior in the Case of Fatal Warnings (263)9.1.2 E8025 Overvoltage in power section (263)9.1.3 E8026 Undervoltage in power section (264)9.1.4 E8027 Safe torque off while drive enabled (265)9.1.5 E8028 Overcurrent in power section (265)9.1.6 E8029 Positive position limit exceeded (266)9.1.7 E8030 Negative position limit exceeded (267)9.1.8 E8034 Emergency-Stop (268)9.1.9 E8040 Torque/force actual value limit active (268)9.1.10 E8041 Current limit active (269)9.1.11 E8042 Both travel range limit switches activated (269)9.1.12 E8043 Positive travel range limit switch activated (270)9.1.13 E8044 Negative travel range limit switch activated (271)9.1.14 E8055 Motor overload, current limit active (271)9.1.15 E8057 Device overload, current limit active (272)X/XXII Bosch Rexroth AG | Electric Drivesand ControlsRexroth IndraDrive | Troubleshooting GuideTable of ContentsPage9.1.16 E8058 Drive system not ready for operation (273)9.1.17 E8260 Torque/force command value limit active (273)9.1.18 E8802 PLL is not synchronized (274)9.1.19 E8814 Undervoltage in mains (275)9.1.20 E8815 Overvoltage in mains (275)9.1.21 E8818 Phase failure (276)9.1.22 E8819 Mains failure (276)9.2 Warnings of Category E4xxx (277)9.2.1 E4001 Double MST failure shutdown (277)9.2.2 E4002 Double MDT failure shutdown (278)9.2.3 E4005 No command value input via master communication (279)9.2.4 E4007 SERCOS III: Consumer connection failed (280)9.2.5 E4008 Invalid addressing command value data container A (280)9.2.6 E4009 Invalid addressing actual value data container A (281)9.2.7 E4010 Slave not scanned or address 0 (281)9.2.8 E4012 Maximum number of CCD slaves exceeded (282)9.2.9 E4013 Incorrect CCD addressing (282)9.2.10 E4014 Incorrect phase switch of CCD slaves (283)9.3 Possible Warnings When Operating Safety Technology (E3xxx) (283)9.3.1 Behavior in Case a Safety Technology Warning Occurs (283)9.3.2 E3100 Error when checking input signals (284)9.3.3 E3101 Error when checking acknowledgment signal (284)9.3.4 E3102 Actual position values validation error (285)9.3.5 E3103 Dynamization failed (285)9.3.6 E3104 Safety parameters validation error (286)9.3.7 E3105 Validation error of safe operation mode (286)9.3.8 E3106 System error safety technology (287)9.3.9 E3107 Safe reference missing (287)9.3.10 E3108 Safely-monitored deceleration exceeded (288)9.3.11 E3110 Time interval of forced dynamization exceeded (289)9.3.12 E3115 Prewarning, end of brake check time interval (289)9.3.13 E3116 Nominal load torque of holding system reached (290)9.4 Non-Fatal Warnings (E2xxx) (290)9.4.1 Behavior in Case a Non-Fatal Warning Occurs (290)9.4.2 E2010 Position control with encoder 2 not possible (291)9.4.3 E2011 PLC - Warning no. 1 (291)9.4.4 E2012 PLC - Warning no. 2 (291)9.4.5 E2013 PLC - Warning no. 3 (292)9.4.6 E2014 PLC - Warning no. 4 (292)9.4.7 E2021 Motor temperature outside of measuring range (292)9.4.8 E2026 Undervoltage in power section (293)9.4.9 E2040 Device overtemperature 2 prewarning (294)9.4.10 E2047 Interpolation velocity = 0 (294)9.4.11 E2048 Interpolation acceleration = 0 (295)9.4.12 E2049 Positioning velocity >= limit value (296)9.4.13 E2050 Device overtemp. Prewarning (297)Troubleshooting Guide | Rexroth IndraDrive Electric Drivesand Controls| Bosch Rexroth AG XI/XXIITable of ContentsPage9.4.14 E2051 Motor overtemp. prewarning (298)9.4.15 E2053 Target position out of travel range (298)9.4.16 E2054 Not homed (300)9.4.17 E2055 Feedrate override S-0-0108 = 0 (300)9.4.18 E2056 Torque limit = 0 (301)9.4.19 E2058 Selected positioning block has not been programmed (302)9.4.20 E2059 Velocity command value limit active (302)9.4.21 E2061 Device overload prewarning (303)9.4.22 E2063 Velocity command value > limit value (304)9.4.23 E2064 Target position out of num. range (304)9.4.24 E2069 Holding brake torque too low (305)9.4.25 E2070 Acceleration limit active (306)9.4.26 E2074 Encoder 1: Encoder signals disturbed (306)9.4.27 E2075 Encoder 2: Encoder signals disturbed (307)9.4.28 E2076 Measuring encoder: Encoder signals disturbed (308)9.4.29 E2077 Absolute encoder monitoring, motor encoder (encoder alarm) (308)9.4.30 E2078 Absolute encoder monitoring, opt. encoder (encoder alarm) (309)9.4.31 E2079 Absolute enc. monitoring, measuring encoder (encoder alarm) (309)9.4.32 E2086 Prewarning supply module overload (310)9.4.33 E2092 Internal synchronization defective (310)9.4.34 E2100 Positioning velocity of master axis generator too high (311)9.4.35 E2101 Acceleration of master axis generator is zero (312)9.4.36 E2140 CCD error at node (312)9.4.37 E2270 Analog input 1 or 2, wire break (312)9.4.38 E2802 HW control of braking resistor (313)9.4.39 E2810 Drive system not ready for operation (314)9.4.40 E2814 Undervoltage in mains (314)9.4.41 E2816 Undervoltage in power section (314)9.4.42 E2818 Phase failure (315)9.4.43 E2819 Mains failure (315)9.4.44 E2820 Braking resistor overload prewarning (316)9.4.45 E2829 Not ready for power on (316)。
SIMOVERT MASTERDRIVES VC Compact PLUS 微型驱动器系列说明书

The proven MASTERDRIVES VC series with optimized power density.The Compact PLUS design is ideally suited for applications where space is at a premium.MASTERDRIVES VC Compact PLUS drives together with the 1PH7 or1LA5/1LA7 series motors form a perfectly harmonized drive system.SIMOVERTMASTERDRIVES VCCompact PLUSThe Compact PLUS design is the newestmember of the SIMOVERT MASTER-DRIVES VC (Vector Control) family andcompliments the spectrum in the lowerpower range. The SIMOVERT MASTER-DRIVES VC power spectrum now spansfrom 0.55 kW to 2300 kW. The CompactPLUS series covers the power rangefrom 0.55 kW to 18.5 kW. Larger powerratings are available in the form of com-pact, chassis and cabinet series units.3-ph. 380–480 V3-ph. 200–230 V3-ph. 380–480 V3-ph. 500–600 V3-ph. 200–230 V3-ph. 380–480 V3-ph. 500–600 V3-ph. 660–690 VSIMOVERT MASTERDRIVES VC is theoptimal drive solution for applicationswhich place high demands on reliabilityand control performance. MASTER-DRIVES VC Compact PLUS are the idealdrives for applications in the textile,packaging and printing industries as wellas in plastics processing and manufac-turing.2CHASSIS22–23kWCOMPACT2.2–37kW1-ph. 380–480 V3-ph. 500–600 V3-ph. 660–690 VCABINET45–15kWCOMPACTPL55185SIMOVERTMASTERDRIVES VC Compact PLUSMulti-motor drive systems may be im-plemented with minimal wiring require-ments using Compact PLUS inverters and rectifier units:The DC link connections are realised using tinned copper bus-bars to DIN 46 433(E-Cu 3 x 10) which are simply inserted into the terminals located on the upper side of the drives. Electrical contact is maintained via spring contacts avoiding the need for tightening screw terminals.The electronics of the rectifier and inver-ter units need only be supplied via an external 24 V auxiliary power supply and the multi-motor drive system is ready for operation.D U L ESystem components may be used to expand the Compact PLUS drive system – also at a later date.Energy may be stored for short periods of time using the capacitor module .The DC link module is used for making the connection between cop-per bus-bar and wired DC links, e.g.for connecting other SIMOVERT MASTERDRIVES series components such as AFE compact rectifier units to the DC link of the Compact PLUS series.Converters may be used for both single and multi-motor drive pact PLUS converters may also be used to supply additional inverters with power and are therefore ideally suited for smaller multi-motor drive systems.The converter is used to supply the in-verters with both power and 24 V DC.C A P A C I T O R M OD U L ED A 65-5964==M =M =M ...InverterRectifier unitBraking resistor Commutating reactorRFI filter=24 V DCPower supply 24 V DCX9X100X100X100X1003AC 380 - 480 V DA65-59673~3~3~~~~~~RFI filter Commutating reactor 3AC 380 - 480 V RFI filter Commutating reactor3AC 380 - 480 VSIMOVERT MASTERDRIVES VC Compact PLUSThe converter has an integrated braking chopper. Only an external braking resistor is required to dissipate the braking energy generated during generative operation. Within the compact PLUS series, addi-tional inverters may be connected to a converter unit via the DC link bus. The sum of the nominal power ratings of the connected inverters may equal the nominal power rating of the converter,e.g. a 5.5 kW converter may supply a4 kW inverter and additionally two0.75 kW inverters.A switched mode power supply is used to supply the converter control electro-nics from the DC link. The control elec-tronics may also be supplied externally using a 24 V DC power supply connected to terminals X9, e.g. in order to maintain communication with a higher level con-trol system when the power section is switched off (DC link is discharged). The switched mode power supply of a converter is also capable of supplying the control electronics of an additional two inverters with the necessary power. The control electronics of an inverter unit must always be supplied externally with 24 V DC power via the X100 termi-nals. The location of the X100 terminalsis always identical enabling the 24 V DC power supply to be wired easily.Unit OptionsSafe STOP (K80)With appropriate external components, unexpected starting of the drive toEN954-1 Safety Category 3 may beprevented. This option is available forall inverters and for converters from5.5 kW nominal power rating.Operation with non-earthedsupplies (L20)Converters without radio-interferencesuppression capacitors, enabling connec-tion to IT-supply networks.Notice:Rectifier units and inverters are suitable for connection to IT-supply networks as standard.The control electronics are alwaysearthed (PELV circuit).4U2V2W2P24P15DCM3~ X100X53312433334P24VM24DA65-5976ASICwithtrigger logicK1Safety relayVoltage adaptationControl electronics24 V DCSupplyOptionK80C o n v e r t e rI n v e r t e rw i t h“S a f e S T O P”O p t i o nU2V2W2M3~ X100123334P24VM24X9U1V1W1D C G HDA65-5975AVoltage adaptactionControl electronics24 V DCOutput24 V DCSupplySwitched-modepower supplyBraking resistor(external)SBP•Evaluation of an external encoder or frequency generator, e.g. setpoint signal•HTL or TTL level selectableNotice:All units have a HTL motor encoder input as standard.5MASTERDRIVES VC Compact PLUSCBP2•Communication via PROFIBUS-DP •The CBP2 board supports PROFIBUS Profile V3 (direct communication,acyclical communication with Master Class II)CBC•Communication via CAN Bus •The CBC board supports CAN levels 1 and 2SLB•Fast communication between the drives via the SIMOLINK bus(fiber-optic cable) with a maximum of 201 nodesCOMMUNICATION BOARDSOption Boards for the Available Option Board Slots (Slots A and B):EB1•4 bidirectional digital inputs/outputs •3 digital inputs •2 analog outputs •3 analog inputs EB2•3 relay outputs with make contacts •1 relay output with change-over contact •2 digital inputs •1 analog output •1 anlaog inputTERMINAL EXPANSION BOARDSPULSE ENCODER EVALUATIONThe units are available with the requiredoption boards factory fitted using the option codes. A maximum of 2 option boards may be installed.For a detailed description of the option boards, please refer to Catalog DA 65.10SIMOVERT MASTERDRIVES VC, Chap-ter 6.Option Option Board Code Board Slot A Slot B CBP2G91G92CBC G21G22SLB G41G42EB1G61G62EB2G71G72SBPC11C12S l o t AS l o t BMASTERDRIVES VC Compact PLUSThe control structure of the SIMOVERT MASTERDRIVES VC is initially set in the factory and maybe selected via parameter, e.g. V/f control, field oriented frequency control.Additionally, signals may be picked-off and injected at given points. Soft-ware defined connections may be severed and new connections made. All possible thanks to BICO Tech-nology.With its free function blocks the SIMOVERT MASTERDRIVES VC is in the position to carry out simple PLC (programmable logic controller) functions. BICO Technology enables the free function blocks to be freely configured.6Available as free function blocksare, for example:•fixed setpoints•fault and alarm signal blocks•arithmetic and control blocks•logic blocks•timers•counters•ramp-function generator•wobble generator•technology controllerUsing BICO Technology, flexible drivesolutions for all applications may becreated.With SIMOVERT MASTERDRIVES VCsimple technology functions throughto complex applications, e.g. winders,may be realised.Doing away with external PLCcomponents saves space and re-duces both engineering time andcosts.Function diagram87654321fp_vc_360_e.vsdSpeed controllerMASTERDRIVES VC09.04.98Speed control, master drive- 360 -smooth n/f(set)0...2000 msP221.M (4)KK0150n/f(set)n/f(set,smo'd)r229P241.B (0)KSrcSetV n/f-Reg1P242.B (0)BSrc Set n/f-Reg1P243.B (0)BSrc nf-Reg1 STOPKp TnLimitation active from torque limit,stop I component when torque limits of the unithave been reached;Limit I component to torque limitsK0153T(set, n/f Reg)T(set,reg. off)r255K0154n/f (Reg,P)K0155n/f(Reg,I-Comp)P254.M (50.0)5.0...200.0 HzResonFreqBStopFilter bandwidth0.5...20.0 HzP253.M (0.5)Band-Stop Gain0.0...150.0P251.M (0.0)n/f Reg Time25...32001 msP240.M (400)P233.M (0.0)0.0...200.0 %n/f Reg. Adapt.1P234.M (100.0)0.0...200.0 %n/f-Reg. Adapt.2n/f-Reg. Gain20.0...2000.0P236.M (10.0)n/f-Reg Gain 10.0...2000.0P235.M (~)n/f RegGain(act)r237P232.B (0)KSrc n/f RegAdaptKK0152n/f Deviation+–>0.0%=0.0 %Scale T(Pre)[ 317.7]KK0158n/f(Band-Stop)T3 = 8 xT0B0229Set I Comp act.Smooth n/f(act)0...2000 msP223.M (~)n/f(act,smo'd)r230KK0151n/f(act,smo´d)xyMotor #PolePairs1 (15)P109.M (~)n (act)r219xyn/f(act)r218KK0148n/f(act)To torque pre-control [365.6]From speedprocessing[350.8]Is only calculated if P260 or P262are not connected in diagram 375From setpoint channel[319.8], [329.8]From control word 2 bit 25 [190.5]r014Setp SpeedK0156n/f RegGain(act)B0228n/f-Reg.StopP238.B (1)KSrc n-RegGain n957.15 = 3P256.B (173)KSrc M(lim,reg1)MINK0161Mmax1(reg,act)P257.B (173)KSrc T(lim,reg2)MAXK0162Mmax2(reg,act)M(lim,act)[369], [370]T(lim2,act)[369], [370]xy[371.5] ... [374.5]DA65-6367F MF 1d n/d tD n F JD V n +M +FD ManeuveringV setboostactset Power sectionSpeed controllerCurrent controllerFriction torque act actGain-adaptionGain-adaptionactTaper tension characteristic Jog setpointTension controlactInertia characteristicDiameter calculatoractconstD A 65-6034Datum Bearb. Zelder09.11.0130A&D MC PM5Siemens AG Dateifp_winder_030_e.vsdSeite Diameter- Speed calculationWinder concept, Basic drive CUMC/VCy x x =43U951.32 =4U961.32 =1085KK0484K0471U115 (0).01x4K0401.02x x 12•x1x2K0501.03y2=x4100%x3 (16bit)y2ScalingK0483y when division by 0 (x3=0):x4 > 0 :y =+199,99 %x4 = 0 :y =0,00 %x4 < 0 :y = -199,99 %value range of X4: -400 % ...+400 %;in case of KK0484 limited on range -200% (200)<1>(32bit)(32bit)200%-200%200%-200%D min [%]Transformation line speed setpoint -> speed setpointn set [%] (Source main speed setpoint)D act [%] (Output limiter)V set [%]Jog line speed setpointto [40.C2]from [35.B7]from [30.C6]KK0470.01U176 (0)U950.86 =4U960.86 =1065KK0526KK0470U177 (0)B0601.02KK040501Jog OFF: 0Jog ON: 1V set [%]U951.31 =4U961.31 =1055KK0404U110 (0).01yKK0001.02x1x2100 %•x1x2200%-200%Maneuvering input (e.g. analog input)Line speed setpointU951.05 =4U961.05 =1075K0471K0526U111 (0).01yK0042.02x1x2x x 1100%2•when division by 0 (x2=0):x1 > 0 :y =+199,99 %x1 = 0 :y =0,00 %x1 < 0 :y = -199,99 %200%-200%KK0042Gear ratio k Gto [30.E3]P402.F (100%) -200.00 ... 200.00%K0405U005.F (0%)-200.00...200.00 %V set [%]n act [%]y x x =43U951.06 =4U961.06 =1005KK0482K0404U114 (0).01x4K0401.02x x 12•x1x2K0091.03y2=x4100%x3 (16bit)y2ScalingK0481y when division by 0 (x3=0):x4 > 0 :y =+199,99 %x4 = 0 :y =0,00 %x4 < 0 :y = -199,99 %value range of X4: -400 % ...+400 %in case of KK0482 limited on value range -200% (200)<1>(32bit)(32bit)200%-200%200%-200%Diameter calculation-1-13210U124 (1)0 (3)K0481U123 (0)Smoothing time constant0...10000 ms U125 (100 ms)K0493U952.67 =4U962.67 =1015D act [%] (Input motorpoti)D min [%]to [35.D4]D A 65-60358•4 combined digital inputs/outputs •3 additional digital inputs •1 analog input, current or voltage •1 analog input, voltage•1 analog output, current or voltage •1 analog output, voltage•One RS 232 and one RS 485 interface•••••In In P10 V / N10 V I < 5 mA 5V 24VIn5V24V7819101112R i = 3.4 k 1314P10N101516DADA In 5V24V121718DA S345-10...+10 V DA -10...+10 VMMX102In In AI 1AI 2U : R in = 60 k I : R in = 250 k U : I < 5 mAAO 2AO 192120HS1HS2R i = 3.4 k R in = 60 k 30 V / 0.5 AOutU : I < 5 mA I : 0...+20 mA0...+20 mA3S4-10...+10 V-10...+10 VDA65-5971Ω ΩΩΩΩ 4 bidirectional digital inputs/outputsOutputsReference voltage Digital inputs Analog input 2(non-floating)11 bits + sign (close S3)Analog output 210 bits + sign Analog output 110 bits + sign InputsDigital input Analog input 1(non-floating)11 bits + sign Floating switch A9MASTERDRIVES VC Compact PLUS10Converters 3-ph. 380 V –15% to 480 V +10% 50/60 HzNominal Rated Line Order No.Dimensions Weight Cooling Soundpower output Short-time current W x H x D air re-press.rating current I n current1)*)quirement levelkW A A A mm kg m3/s db (A)0.55 1.5 2.4 1.76SE7011-5EP60 45 x 360 x 260 3.00.002181.1 3.0 4.8 3.36SE7013-0EP6067.5 x 360 x 260 3.70.009401.5 5.0 8.0 5.56SE7015-0EP6067.5 x 360 x 260 3.70.009403 8.012.8 8.86SE7018-0EP60 90 x 360 x 260 4.10.01837410.016.011.06SE7021-0EP60 90 x 360 x 260 4.20.018375.514.022.415.46SE7021-4EP60135 x 360 x 26011.10.041487.520.532.822.66SE7022-1EP60135 x 360 x 26011.20.041481127.043.229.76SE7022-7EP60180 x 360 x 26015.30.061591534.054.437.46SE7023-4EP60180 x 360 x 26015.50.06159*)Rated line current of a converter excluding additional inverters. If the converter supplies additional inverters then this value is 1.76 x I n (I n = rated output current).Within the compact PLUS series, additional inverters may be connected to a converter unit via the DC link bus.The sum of the nominal power ratings of the complete system may equal twice the nominal power rating of the converter.For the infeeding power, a coincidence factor of 0.8 must be taken into account, i.e. the rectifier of the converter is thermically designed for 1.6 times the nominal power of the converter.The converter switched mode power supply can supply an additional 2 inverters with 24 V DC power(in the case of a 6SE7011-5EP60 converter only 1 additional inverter may be supplied).A capacitor module may be connected to the converter for short-time energy storage.Inverters DC 510 V –15% to 650 V +10%Nominal Rated DC link Order No.Dimensions Weight Cooling Sound Aux. currentpower output Short-time rated W x H x D air re-press.24 V DCrating current I n current1)current quirement level(max. at 20 V)kW A A A mm kg m3/s db (A)A0.75 2.0 3.2 2.46SE7012-0TP6045 x 360 x 260 2.60.00218 1.51.5 4.0 6.4 4.86SE7014-0TP6067.5 x 360 x 260 3.20.00940 1.52.2 6.1 9.8 7.36SE7016-0TP6067.5 x 360 x 2603.30.00940 1.5410.216.312.16SE7021-0TP6090 x 360 x 260 3.40.01837 1.55.513.221.115.76SE7021-3TP60135 x 360 x 260 8.90.0414827.517.528.020.86SE7021-8TP60135 x 360 x 260 9.10.0414821125.540.830.36SE7022-6TP60135 x 360 x 260 9.30.0414821534.054.440.56SE7023-4TP60180 x 360 x 26013.80.06159218.537.560.044.66SE7023-8TP60180 x 360 x 26014.00.0615921)Short-time current1.6 x I n for 30 s1.36 x I n for 60 srefer to diagram on page 111.36 x I n for 60 srefer to diagram above2)The busbars E-Cu 3x10 have a rated current of 120 A. The 100 kW rectifier unit must therefore be located in the middle of the multi-motor drive configuration,so that the DC link current is shared equally to the inverters connected to the left and the right of the rectifier unit.1112MASTERDRIVES VC Compact PLUS13Braking resistorsRated braking power Short-time braking Continuous braking Resistance Order No.Dimensions Weight power power W x H x D P20P3PDB kWkWkWOhmmmkg5 7.5 1.25806SE7018-0ES87-2DC0145 x 180 x 5406 10 15 2.5406SE7021-6ES87-2DC0145 x 360 x 54012 20 30 5206SE7023-2ES87-2DC0450 x 305 x 48517 50 7512.5 86SE7028-0ES87-2DC0745 x 305 x 4852710015025 46SE7031-6ES87-2DC0745 x 605 x 48547Capacitor moduleCapacitance max. DC link voltage Order No.DimensionsWeight continuous short-time W x H x D mFVVmmkg5.17157806SE7025-0TP87-2DD090 x 360 x 2606DC link moduleContinuous current Voltage rangeOrder No.Dimensions Weight W x H x D Ammkg120510 V DC –15% to 650 V +10%6SE7090-0XP87-3CR090 x 360 x 260 2.6Radio interference suppression filtersRated current Integrated Limit-Typ. power loss Order No.Weight line reactor value class2% u kAWkg2yes B1 56SE7012-0EP87-0FB0 2 6yes B1 136SE7016-0EP87-0FB0 3.5 12yes B1 236SE7021-2EP87-0FB0 5.5 18yes B1 266SE7021-8EP87-0FB0 7.5 36no B1 306SE7023-4ES87-0FB1 4 80no B1 406SE7027-2ES87-0FB110190no A1 706SE7031-8ES87-0FA013320no A11006SE7033-2ES87-0FA121Commutating reactors 2% u kRated current Power loss Order No.Weight 50/60 Hz approx.AWkg1.5 8/104EP3200-4US 1 312/184EP3200-5US 1 523/354EP3200-2US 1 9.135/384EP3400-2US 1.511.235/384EP3400-1US 1.51645/484EP3500-0US 21852/574EP3600-4US 32852/574EP3600-5US 3Rated current Power loss Order No.Weight 50/60 Hz approx.AWkg35.5 57/604EP3700-2US 4 40 57/604EP3700-5US 4 50 67/714EP3800-2US 5 63 67/714EP3800-7US 5 80 82/874EP3900-2US 6.5125 96/1034EP4000-6US10224190/2004EU2552-8UA00-0A 16.5System componentsDC link connectionThe DC link connection is made using three busbars: positive-connection (C), negative-connection (D) and protective earth (PE). Copper busbar E-Cu 3x10 tinned and rounded according to DIN 46 433, rated current 120 A (e.g. Siemens 8WA2 842length 1 m, or Phoenix Contact GmbH & Co., type NLS-Cu 3/10 Internet: )3000 1/min15MASTERDRIVES VC Compact PLUSDimensionsRectifier unitsFront views without front coverDC link and capacitor moduleConverter 0.55 kW 1.1/1.5 kW 3 kW and 4 kW 5.5/7.5 kW 11/15 kW Inverter0.75 kW1.5/2.2 kW4 kW5.5/7.5/11 kW15/18.5 kWFront views without front coverMASTERDRIVES VC Compact PLUSBraking resistor 100 kW6SE7031-6ES87-2DC016MASTERDRIVES VC Compact PLUS6SE7012-0EP87-0FB0MASTERDRIVES VCCompact PLUS ArrayScrew terminal 8WA9 200(for I≤ 15 A)LNSolid0.5 mm2 to 6.0 mm2Finely stranded 1.5 mm2to 4.0 mm2Screw terminal RKW 110 or16 A to 35.5 A)TRKSD 10 (for ILNSolid 1.0 mm2 to 16.0 mm2Finely stranded 1.0 mm2to 10.0 mm2Earthing stud M 6 x 12Solid 2.5 mm2 to 10.0 mm2Finely stranded 4.0 mm2to 10.0 mm2Screw terminal RKW 110≤ 40 A)or TRKSD 10 (for ILNSolid 1.0 mm2 to 16.0 mm2Finely stranded 1.0 mm2to 10.0 mm2Earthing stud M 6 x 12Solid 2.5 mm2 to 10.0 mm2Finely stranded 4.0 mm2to 10.0 mm2Screw terminal 8WA1 30440 A to 50 A)(for ILNSolid 1.0 mm2 to 16.0 mm2Stranded10.0 mm2 to 25.0 mm2Finely stranded 2.5 mm2to 16.0 mm2Earthing terminalEK 16/35Solid 2.5 mm2 to 16.0 mm2Finely stranded 4.0 mm2to 16.0 mm2MASTERDRIVES VC Compact PLUSSiemens AGAutomation and Drives Group Motion Control SystemsP .O. Box 3269, 91050 Erlangen Federal Republic of Germany Siemens AktiengesellschaftOrder No. 6ZB5711-0AA02-0BA0Printed in the Federal Republic of Germany 18401/222198 SV 1101 4.0© Siemens AG 2001Subject to change without prior notice Additional information about SIMOVERT MASTERDRIVEScan be found in our Catalogs DA 65.10 and DA 65.11Information about this product can befound in the Internet under:http://www.siemens.de/automation/mc。
occupancy_sensor_installation_说明书

PK-93307-10-00-2BWARNINGS AND CAUTIONS:• TO AVOID FIRE, SHOCK, OR DEATH; TURN OFF POWER AT CIRCUIT BREAKER OR FUSE AND TEST THAT POWER IS OFF BEFORE WIRING!• To be installed and/or used in accordance with appropriate electrical codes and regulations.• If you are unsure about any part of these instructions, consult an electrician.• Sensors must be mounted on a vibration free surface.• Do not terminate using data type wire, such as Cat 5/5E.• Do not mount sensors closer than 10 feet to each other.• All sensors must be mounted at least 6 feet away from air vents, air handlers, and reflective surfaces (windows/mirrors).• Do not touch the surface of the lens. Clean outer surface with a damp cloth only.WARNINGS AND CAUTIONS:For Occupancy Sensors installed to control Emergency Lighting Equipment:If this equipment is being used for Emergency Lighting and Power Equipment, please adhere to the following information. This equipment is rated for only 25C if used on Emergency Lighting Equipment. Apply the "Emergency Circuits" label (provided) to the front cover.IMPORTANT SAFEGUARDSWhen using electrical equipment, basic safety precautions should always be followed, including the following:a) READ AND FOLLOW ALL SAFETY INSTRUCTIONS.b) DO NOT use outdoors.c) DO NOT mount near gas or electric heaters.d) Equipment should be mounted in locations and at heights where it will not readily be subjected to tampering by unauthorized personnel.e) The use of accessory equipment not recommended by manufacturer may cause an unsafe condition.f) DO NOT use this equipment for other than the intended use.SAVE THESE INSTRUCTIONSAll servicing shall be performed by qualified service personnel. If any Emergency Circuits are fed or controlled from this panel, it must be located electrically where fed from a UPS, generator, or other guaranteed source of power during emergencies and power outage situations.120V 60Hz277V 60Hz800W/VA, Tungsten, Ballast 8A, Electronic Ballast1/4 hp1200VA, Ballast 5A, Electronic Ballast 1/3 hpRating:6A-6AX 250VOperating Temperature:32˚ to 104˚F (0˚ to 40˚C)720-1440 W/VA120-240 50Hz MUltrasonic Ceiling Mounted Line Voltage Occupancy SensorCalifornia Title 20 CompliantCat. No. ODC Ø5-UDW, ODC1Ø-UDW, ODC2Ø-UDWNo Minimum Load RequiredCompatible with electronic and magnetic ballasts, electronic and magnetic low-voltage transformers, incandescent lamps, and fansINSTALLATION INSTRUCTIONSMount in corner/over doorwaySuggested Mounting Location 500 sq. ft.1000 sq. ft.2000 sq. ft.Coverage ODC05-UDW ODC10-UDW ODC20-UDW Cat. No.1-Way Ultrasonic 2-Way Ultrasonic 2-Way Ultrasonic Description120-277,50/60Hz 120-277,50/60Hz 120-277,50/60HzVoltage Range60-30ma 60-30ma 60-30maCurrent ConsumptionCATALOG ITEMSMount in center of room, 8-12 ft height Mount in center of room, 8-12 ft heightLIMITED 5 YEAR WARRANTY AND EXCLUSIONSLeviton warrants to the original consumer purchaser and not for the benefit of anyone else that this product at the time of its sale by Leviton is free of defects in materials and workmanship under normal and proper use for five years from the purchase date. Leviton’s only obligation is to correct such defects by repair or replacement, at its option. For details visit or call 1-800-824-3005. This warranty excludes and there is disclaimed liability for labor for removal of this product or reinstallation. This warranty is void if this product is installed improperly or in an improper environment, overloaded, misused, opened, abused, or altered in any manner, or is not used under normal operating conditions or not in accordance with any labels or instructions. There are no other or implied warranties of any kind, including merchantability and fitness for a particular purpose, but if any implied warranty is required by the applicable jurisdiction, the duration of any such implied warranty, including merchantability and fitness for a particular purpose, is limited to five years. Leviton is not liable for incidental, indirect, special, or consequential damages, including without limitation, damage to, or loss of use of, any equipment, lost sales or profits or delay or failure to perform this warranty obligation. The remedies provided herein are the exclusive remedies under this warranty, whether based on contract, tort or otherwise.。
汽车零部件维护指南说明书
AccessoriesInstallation.................................. 117ACCESSORY (Ignition KeyPosition) .......................................51AddingAutomatic TransmissionFluid ....................................... 161Brake Fluid................................. 163Clutch Fluid................................ 163Differential Oil ...........................161Engine Coolant ..........................156Engine Oil ..................................152Manual Transmission Fluid.......162Power Steering Fluid................. 165Windshield Washer Fluid......... 160Additional Safety Information ......... 18Door Locks................................... 19Head Restraint Position .............. 18Seat-back Position ....................... 18Driving with Pets......................... 19Storing Cargo Safely ................... 19Additives, Engine Oil..................... 154AdjustmentsHeadlights (182)Head Restraints ...........................60Mirrors .........................................69Seats.............................................. 55Steering Wheel ............................45Airbag (SRS) .....................................12Air Cleaner...................................... 166Air ConditioningMaintenance............................... 175Usage......................................81, 88Air Outlets (Vents) .....................80, 87Air Pressure, Tires......................... 174Alarm, Anti-theft............................. 107Alcohol and Drugs ...........................26Aluminum Wheels, Cleaning ........ 195Antenna, Cleaning.......................... 194Antifreeze........................................ 156Anti-lock Brakes (ABS)Description.................................230Fluid ............................................164Indicator Light .............................33Operation.................................... 131Anti-theft Steering ColumnLock ..............................................51Anti-theft System............................ 107Appearance Care............................ 193Ashtrays .. (75)Audio Controls, Remote ................104Audio System....................................93Automatic Climate ControlSystem ..........................................87Automatic Speed Control ................47Automatic Transmission ............... 126Capacity, Fluid ...........................228Checking Fluid Level................ 161Shifting ....................................... 126Shift Lever Positions ................. 126Shift Lock Release ..................... 129Shift Position Indicator (35)Baby, Holding a................................21Back-up Lamp Replacement ......... 188BatteryCharging SystemIndicator...........................32, 215Jump Starting .............................210Maintenance............................... 170Specifications .............................229Before Driving................................ 109Belts, Seat . (5)CONTINUEDBeverage Holder ..............................73Body Repair ....................................200Brakes ............................................. 130Anti-lock System (ABS) ............ 131Break-in, New Linings............... 110Fluid............................................ 163Light, Burned-out ......................188Parking .........................................71System Indicator.......................... 32Wear Indicators ......................... 130Brakes, ABSDescription.................................230Operation.................................... 131System Indicator.......................... 33Braking System.............................. 130Break-in, New Car.......................... 110Brightness Control,Instruments..................................41Brights, Headlights..........................40Bulb Replacement.......................... 184Back-up Lights........................... 188Brake Lights............................... 188Ceiling Lights............................. 189Courtesy Lights ......................... 189Front Side Marker Lights......... 186Headlights. (184)License Plate Lights ..................189Parking Lights ........................... 186Rear Side Marker Lights .......... 187Specifications .............................229Trunk Light................................ 191Turn Signal Lights..................... 185Bulbs, Halogen . (184)Cables, Jump Starting with ........... 210Cancel Button ...................................49Capacities Chart .............................228Carbon Monoxide Hazard...............26Cargo, Loading............................... 118Car Seats for Children .....................20Cassette PlayerCare............................................. 106Operation...................................... 98CAUTION, Explanation of ................ii CD Changer.................................... 100Ceiling Lights ...................................76Certification Label ..........................226Chains ............................................. 181Change OilHow to (154)When to ...................................... 146Changing a Flat Tire ...................... 203Changing Engine Coolant............. 157Charging System Indicator .....32, 215Check Engine Light................. 33, 216CheckingAutomatic TransmissionFluid ....................................... 161Battery Condition ...................... 170Brake Fluid................................. 163Clutch Fluid................................ 165Differential Oil ...........................162Drive Belts.................................. 176Engine Coolant ..........................156Engine Oil .................................. 152Fuses ...........................................218Manual Transmission Fluid...... 162Power Steering Fluid................. 165Checklist, Before Driving.............. 120Child Safety.......................................20Cigarette Lighter.............................. 74Cleaner, Air..................................... 166CleaningAluminum Wheels..................... 195Antenna....................................... 194Exterior.......................................194Interior........................................ 197Leather........................................ 197Seat Belts.................................... 197Vinyl............................................ 197Windows..................................... 198Wood Trim ................................. 197CLEAN Light.................................. 106Climate Control System ..................87Clock, Setting the............................. 72Clutch Fluid.................................... 165Code, Audio system....................... 105CO in the Exhaust............................26Cold Weather, Starting in.............. 122Compact Spare ...............................202Console Compartment.....................73Controls, Instruments and ..............29CoolantAdding ........................................ 156Checking .................................... 156Proper solution .......................... 156Temperature Gauge ....................37Corrosion Protection ..................... 199Courtesy Lights ................................76Crankcase Emission ControlSystem ........................................235Cruise Control Operation ................47Customer Relations Office (241)DANGER, Explanation of.................. ii Dashboard ........................................30Daytime Running Lights .................40Dead Battery, What to do ..............210Defog and Defrost...................... 86, 91Defogger, Rear Window.................. 44Defog, Rear Window........................44Defrosting the Windows............86, 91Dexron ® II AutomaticTransmission Fluid.................... 161Differentral Oil ...............................162Dimensions.....................................228Dimming the Headlights................. 40DipstickAutomatic Transmission........... 161Engine Oil ..................................152Directional Signals ...........................41Disabled, Towing Your Car if .......223Disc Brake Wear Indicators..........130Disposal of Used Oil...................... 155DoorsLocking and Unlocking...............52Lockout Prevention .....................52Monitor Light. (34)Power Door Closers ....................53Power Door Locks....................... 52DOT Tire Quality Grading ............233Downshifting, 6-speed ManualTransmission.............................. 123Drive Belts ......................................176Driving ............................................ 119Economy..................................... 116In Bad Weather..........................135In Foreign Countries .....................111Driving Position MemorySystem (61)Economy, Fuel ...............................116Emergencies on the Road .............201Battery, Jump Starting ..............210Changing a Flat Tire .................203Charging System Indicator.......215Check Engine Light ..................216Checking the Fuses...................218Low Oil Pressure Indicator.......214Malfunction Indicator Lamp .. (216)CONTINUEDManually ClosingtheMoonroof.........................217Overheated Engine ...................212Emergency Brake ............................71Emergency Flashers........................ 44Emission Controls ..........................235EngineBelts............................................ 176Check Light..........................33, 216Coolant Temperature Gauge...... 37Malfunction IndicatorLamp.................................33, 216Oil Pressure Indicator .........32, 214Oil, What Kind to Use (15)3Overheating ...............................212Specifications .............................229Ethanol in Gasoline........................ 111Evaporative Emission controls .....235Exhaust Fumes.................................26Exhaust Gas RecirculationSystem ........................................236Expectant Mothers, Use of SeatBelts by.........................................10Exterior, Cleaning the . (194)Fabric, Cleaning............................. 197Fan, Interior................................ 81, 92Features, Comfort andConveniences...............................79Filling the Fuel Tank ..................... 112FiltersFuel............................................. 167Oil................................................ 154First Gear, Shifting......................... 128Flashers, Hazard Warning ..............44Flat Tire, Changing a .....................203FluidsAutomatic Transmission........... 161Brake........................................... 163Clutch .........................................165Differential Oil ...........................162Manual Transmission ............... 162Power Steering .......................... 165Windshield Washer ....................... 160FM Stereo RadioReception...................................... 94Four-way Flashers............................44Front End, Towing by Emergency Wrecker.. (223)Fuel.................................................. 110Fill Door and Cap ...................... 112Filter ............................................167Gauge............................................ 37Octane Requirement .................110Oxygenated................................ 110Reserve Indicator......................... 35Tank, Filling the ........................112Fuel Mileage, Improving............... 116Fuel Station Procedures ................ 112Fuses, Checking the . (218)Gasohol........................................... 111Gasoline .......................................... 110Filter............................................ 167Fuel Reserve Indicator ................35Gauge............................................ 37Octane Requirement .................110Oxygenated Fuels...................... 110Tank, Filling the ........................112Gauges ..............................................36Engine Coolant Temperature.....37Fuel ...............................................37GAWR(Gross Axle Weight Rating) (137)Gearshift Lever PositionsAutomatic Transmission (126)6-speed ManualTransmission (123)Glass Cleaning (198)Glove Box (54)GVWR (Gross Vehicle WeightRating) (137)Halogen Headlight Bulbs (184)Hazard Warning Flashers (44)HeadlightsAiming (182)Daytime Running Lights (40)High Beam Indicator (35)High Beams, Turning on (40)Low Beams, Turning on (40)Reminder Chime (40)Replacing Halogen Bulbs (184)Turning on (40)Head Restraints (60)Heating and Cooling (80)High Altitude, Starting at (122)High-Low Beam Switch (40)High Speed, Shifting at (124)Holding a Baby (20)Hood, Opening the (113)Horn (49)Hot Coolant, Warning about (156)Hydraulic Clutch (165)Hydroplaning (136)Identification Number, Vehicle (226)If Your Car has to be Towed (223)IgnitionKeys (50)Switch (51)Timing Control System (236)Important Facts AboutAirbags (13)Indicator Lights, InstrumentPanel (31)Infant Restraint (19)Inflation, Proper Tire (177)Inside Mirror (69)Inspection, Tire (178)Instrument Panel (30)Instrument Panel Brightness (41)Interior Cleaning (197)Interior Lights (76)Introduction (i)Jacking Up the Car (205)Jack, Tire (204)Jump Starting (210)Keys (50)Label, Certification (226)Lane Change, signaling (41)Lap Belt (7)Lap/Shoulder Belts (6)Leaking of Exhaust into Car (26)Leather, Cleaning (197)Lighter, Cigarette (74)CONTINUED。
C2000系统应用协同化开发套件v1.01高压数字电机控制套件快速引导说明书
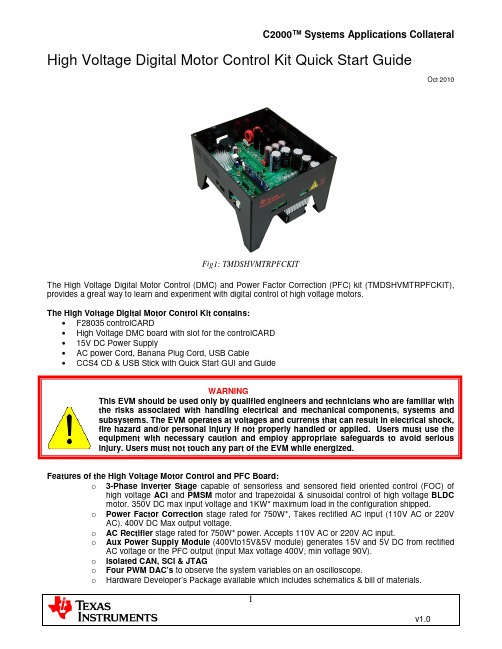
High Voltage Digital Motor Control Kit Quick Start GuideOct 2010Fig1: TMDSHVMTRPFCKITThe High Voltage Digital Motor Control (DMC) and Power Factor Correction (PFC) kit(TMDSHVMTRPFCKIT), provides a great way to learn and experiment with digital control of high voltage motors.The High Voltage Digital Motor Control Kit contains:•F28035 controlCARD•High Voltage DMC board with slot for the controlCARD•15V DC Power Supply•AC power Cord, Banana Plug Cord, USB Cable•CCS4 CD & USB Stick with Quick Start GUI and GuideWARNINGThis EVM should be used only by qualified engineers and technicians who are familiar withthe risks associated with handling electrical and mechanical components, systems andsubsystems. The EVM operates at voltages and currents that can result in electrical shock,fire hazard and/or personal injury if not properly handled or applied. Users must use theequipment with necessary caution and employ appropriate safeguards to avoid seriousinjury. Users must not touch any part of the EVM while energized.Features of the High Voltage Motor Control and PFC Board:o3-Phase Inverter Stage capable of sensorless and sensored field oriented control (FOC) of high voltage ACI and PMSM motor and trapezoidal & sinusoidal control of high voltage BLDCmotor. 350V DC max input voltage and 1KW* maximum load in the configuration shipped.o Power Factor Correction stage rated for 750W*, Takes rectified AC input (110V AC or 220V AC). 400V DC Max output voltage.o AC Rectifier stage rated for 750W* power. Accepts 110V AC or 220V AC input.o Aux Power Supply Module (400Vto15V&5V module) generates 15V and 5V DC from rectified AC voltage or the PFC output (input Max voltage 400V, min voltage 90V).o Isolated CAN, SCI & JTAGo Four PWM DAC’s to observe the system variables on an oscilloscope.o Hardware Developer’s Package available which includes schematics & bill of materials.o Open source software available through controlSUITE for each type of the motor and control type.*For detailed feature list and power ratings and safety related information refer to the kit’s HW Reference guideThe software available with the kit is pre-optimized for the motors that are available with the kit. The software is completely open source, and hence can be easily modified to tune and run a different motor. The following motors are available with the kit:AC Induction Motor (HVACIMTR)(220V , 3 phase AC, 0.25 HP)PMSM Motor (HVPMSMMTR)(200V, 3 Phase AC, 0.4KW)BLDC Motor (HVBLDCMTR)(160-170V, 3 Phase AC)Note: The BLDC motor being shipped with the kit is rated for 160V in regions having mains supply > 140V AC a step down transformer needs to be used. Otherwise the GUI would give an over voltage error and disconnect from the controller.Hardware OverviewFig2: Block Diagram for a typical motor drive system using power factor correctionFig 2, illustrates a typical motor drive system running from AC power and various blocks that make up such a system. All these power/control blocks are present on the TMDSHVMTRPFCKIT board in form of macro blocks. Below is a list of all the macro blocks names and numbers present on the board and a short description of it’s function, Fig 3, shows the location of these block on the motor control board and a few key connector location. HVDMC Main Board [Main]– Consists of controlCARD socket, communications(isoCAN) block,Instrumentation(DAC’s), QEP and CAP connection and routing of signals in b/w the macros and to the control card.AC-Power Entry [M1] – Takes input AC power from mains/wall power supply and rectifies it. This rectified voltage can then be used for input of the PFC stage or used to generate the DC bus for the inverter directly. Aux Power Supply Module [M2]– This module can take up to 400V input and generate 5V and 15V DC power. Rectified AC input can directly be connected to this module or output from the PFC stage cane be used with appropriate jumper settings.Iso-USB-to-JTAG Macro [M3] – Provided on board isolated JTAG connection through USB to the host. Can also be used for SCI(isolated) communication for connection with GUI.PFC-2PhiL Macro [M4] - Two-phase interleaved PFC stage can be used to increase efficiency of operation. Inverter2Ph-HV-3shunt Macro [M5] - Three-phase inverter, provides the inverter stage to enable control of high voltage motors.DC-PwrEntry Macro [M6] - DC power entry, used to generate the 15V, 5V and 3.3V for the board from 15V DC power supply supplied with the kit.Nomenclature : To easily find a component let’s say a jumper they are referred with their macro number in the brackets. For example, [M3]-J1 would refer to the jumper J1 located in the macro M3 and [Main]-J1 would refer to the J1 located on the board outside of the defined macro blocks.Inverter3Ph-HV-Control Card Slot PFC-2PhiL MacroAC-Power EntryAux PowerIso-USB-to-JTAG DC-PwrEntry [Main]-P1[Main]-BS1[Main]-BS5USB Cable connector3Shunt Macro [M5]C2000[M4][M1]Supply Module[M2][M3]Macro [M6]AC Power InputRectified AC Out Inv-BUS Input[Main]-TB3Terminal Block[M3]-JP1Fig3: HVDMCMTRPFCKit Board Macros Quick Start GUIThe kit comes with a GUI which provides a convenient way to evaluate the functionality of the kit and the F28035 device without having to learn and configure the underlying project software or install CCS. The interactive interface using sliders, buttons, textboxes and graphs enables easy demo of sensorless control of ACI, PMSM and BLDC Motor.Hardware SetupNote: Do not apply AC power to board before you have verified these settings!The kit ships with the control card inserted and the jumper and switch settings pre done for connecting with the GUI. However the user must ensure that these settings are valid on the board. To validate these settings and connect the motor the lid of the kit needs to be unscrewed. The lid can be screwed back once these settings are verified.1) Make sure nothing is connected to the board, and no power is being supplied to the board.2) Insert the Control card into the [Main]-J1 controlCARD connector if not already populated.4) Make sure the following jumpers & connector settings are valid i.e.a. [M3]-J4 is populatedb. [Main]-J11,J12 & J13 are populated with jumper b/w 1 and middle pinc. [Main]-J3,J4 & J5, are populatedd. [Main]-J2 is populated with a jumper b/w bridge and the middle pine. Make sure that [M6]-J6,J7,J8 ; [Main]-J9 and [M3]-J1,J3,J5 are not populatedf. Banana cable b/w [Main]-BS1 and [Main]-BS5 is installed5) Make sure that the following switches are set as described below on the F28035 control card to enableboot from flash and connection to the SCIa. SW1 is in the OFF positionb. SW2 on controlCARD, Position 1 = ON, Position 2 = ON6) Connect a USB cable from [M3]-JP1 to the host computer. [M3]-LD1 would light up indicating that theUSB is powered. Windows would then search for a driver for the device. If the computer has CCSv4 or prior versions of it installed which supported XDS100 emulator, Windows should be able to find the driver successfully. If not you would be prompted to install the driver. Installing driver for USB to serial : Do not let Microsoft search for the driver, instead browse to the following location on the USB stick drive shipped with the kit <Drive Name:\CDM 2.06.00 WHQL Certified>, windows should now be able to find the driver and would install it. If Windows still does not find the driver, you may have to repeat the process and point to the location pointed out previously. You may have to reboot the computer for the drivers to come into effect. Once installed you can check if the installation was completed properly by browsing to ControlPanel-> System->Hardware->Device Manager and looking for USB Serial Port under Ports(COM&LPT). Note this port number down.7) Connect the motor you want to spin to the terminal block [Main]-TB3 on the board, (Only the Red, Whiteand Black wire need to be connected to TB3, the Green wire is ground and should not be connected to the [Main]-TB3)8) Re-fit the Lid on the kit.9) Connect one end of the AC cord to [Main]-P1, Do not connect the other end to wall supply. Use anarrangement which allows for a switch b/w the wall supply and the board.Software SetupThe QSG GUI (HVMTRPFCKIT-GUIv1.exe) can be located in the drive that is shipped with the kit or once controlSUITE is installed at the following location:controlSUITE\developement_kits\HVMotorCtrl+PfcKit\~GUI\HVMTRPFCKIT-GUIv1.exeThe GUI is written in C# using Microsoft Visual Studio .NET with the source code located at:controlSUITE\developement_kits\HVMotorCtrl+PfcKit\~GUI\ ~SourceThe GUI requires Microsoft .NET framework 2.0 or higher to run. Please ensure that this software is installed prior to running this program.The kit ships with a F28035 Control Card which is pre-flashed with the code that enables interface to this GUI. The flashed code is optimized for running sensorless FOC on ACI and PMSM motor and sensorless trapezoidal control on BLDC motor that are available with the kit. Note that the performance of the motor with the flashed image is not a metric of quality of control and performance levels achievable using the TI DMC library. Please refer to the individual system software and corresponding literature for details. These can be downloaded through controlSUITE. The flash image can be re-flashed using CCSv4 if need be. The image can be found in the drive shipped with the kit or at the following location:controlSUITE\developement_kits\ HVMotorCtrl+PfcKit\~GUI\ HVMTRPFCKIT-GUI-FlashImagev1.outRunning the GUI1) Make sure all the jumper and connector setting are as described in the Hardware setup section.2) Browse to and double click on HVMTRPFCKIT-GUIv1.exe The GUI window should pop up (Fig 4). If thisis the first time you would have to go through a license agreement. The GUI is divided into the following sections•Motor Select Box: Allows the user to select the motor type that is connected to the board. It also notifies the type of control being used for each type of motor.•Motor Control / Status Box: This box contains sliders, textboxes, checkboxes, buttons and graphs that enable control of the motor and display various system parameters depending on the motortype selected.•Connection Box: Contains control for setting up connection with the board. Clicking on Setup Connection opens a new window which lets you select the serial port and baud rate.Connect/Disconnect switch is used to establish SCI connection with the controller or terminate the connection. A checkbox displays the status of connection i.e. whether the connection is established/ not established or broken.Note: Many variables on the GUI are referenced in per unit scale (pu). This is done as fixed point math is used by the controller to execute the control algorithm.Fig4: GUI Startup3) Now Click on “Setup Connection” and ensure the Baud Rate is set to 57600 and that the Boot onConnect Box is unchecked.4) Now select the appropriate COM port. This can be found out by going toControl Panel->System->Hardware tab->Device Manager->Ports(COM & LPT).And look for the one which is described as USB Serial Port or similar. Hit OK once done.Fig5: GUI Setup Connections5) Return to the GUI screen and now connect the other end of the AC power cord to mains/wall poweroutlet. Use an assembly such that a switch is in place between the mains supply and the board. For example this can achieved using an extension cable.6) Once the mains is connected the board would power up and you would see that the [Main]-LD1 on theboard is green (indicating power) and LD3 (Red) on the board is blinking slowly indicating that code is running on the control card.7) Now press “Connect” on the GUI window. If an incorrect image is flashed on the control card an errormessage on the bottom of the screen would be displayed. In this case it is recommended to switch of the Mains supply and reflash the control card with the correct image. Once the connection is established the LD2(Red) on the control card would start blinking and the Motor Select Panel would become active.8) After the connection is established to the controller the type of motor can be selected by clicking on themotor image. Once the motor is selected the image of the motor and type of control being used would be highlighted and the motor select panel would gray out. If the selection needs to be changed the board needs to be power cycled as the code accepts motor type only once from the GUI for safety reasons in its lifetime. In case of connect disconnect without power cycling the board the previous motor selection is remembered. Also note if BLDC motor is being used with wall supply of >140V AC a step down transformer must be used as the BLDC motor is rated for 160V, otherwise an over voltage condition flag would be displayed.9) The motor control/status box would now become active. The variables being displayed in the box wouldchange depending on the type of motor selected. Following is a description of each of these controls: •DC Bus Voltage Textbox: Textbox displays the rectified AC voltage. This voltage should be around 154V for 110V AC supply but can go as high as 180V depending on line conditions. For 220 AC line this voltage would be close to 311V.•Start / Stop Button: This button can be used to start and stop the motor. The color & text of the button changes depending on what action can be taken. Please provide for enough time for the motor to respond to the command.•Speed Reference Slider & Textbox: Speed of the motor can be varied using this slider and the textbox. The range of speed reference slider changes depending on the motor type selected. By default when the motor is started a 0.3pu speed reference is provided. To change the speed the slider can be moved or a value entered into the textbox. The textbox changes color as value is being typed depending on if it can accept that value. A value can only be entered if it is displayed as green. Once the speed ref is changed the motor ramps up to the reference speed. Time taken for the motor to reach the speed would depend on motor type. Please provide for enough time for motor to ramp up to this speed. Also note that the ramp is deliberately slow in the flashed image, and can be easily modified in the code for desired performance levels and characteristics.•Estimated Speed Textboxes: These text boxes display the speed of the motor as estimated by the sensorless algorithm. Both per unit and absolute rpm values are displayed. Note for different type of motor the rpm speed may vary for the same per unit speed reference as the maximum rated speed of the motors are different.•Park Q & Park D output Textboxes (for ACI and PMSM motors only) These two text boxes display the park Q and park D values as computed by the sensorless algorithm. These can be observed to change as the motor is loaded. Note for the PMSM motor Park D value would remain close to zero.•Graph Windows: Upto Four graph windows can display data captured from the controller.Depending on the motor type this data would change. For example for an ACI motor the graphs would display the estimated flux, estimated angle and the leg currents sensed(Fig 6). For BLDC the back EMF’s sensed would be observed, and for PMSM the Phase voltage, phase Duty, estimated angle and Alpha back emf are displayed.•AutoScale Checkbox: Check this box to autoscale the graph to get more meaningful waveforms.•Dlog Prescalar Textbox: This value is used by the Data Logging module running on the controller to sample the data for plotting. Greater this value more cycles are visible in the graph window.However as fewer points are sampled this reduces the accuracy. This value needs to be changed depending on the motor type and speed reference chosen. By default a value of 5 is pre-selected.•Graph Update Rate Select: This is the rate at which the GUI asks the controller for data to plot on the graphs. Note unless you select a rate the GUI does not ask the controller for any data and hence nothing would be plotted on the graphs. Also note that the data is captured in real time however only a small snapshot of it is displayed on the graph window.•Update Rate Select: This is the rate of how frequently the data for the textboxes, buttons and sliders is updated from the GUI to the controller and vice versa.Fig 6: GUI Running ACI Motor10) Once the start button is clicked the motor accelerates to the speed reference value and the speed loopis closed. The time taken for motor to ramp up to a particular speed would depend on motor type.Hence provide for enough time for the motor to ramp up to the speed set. The speed can be varied by moving the slider or entering value in the textbox. The motor can be stopped and started number of times. Note that each time the motor is stopped you may observe a surge in the DC bus voltage. Note: If LD2 on the control card stops blinking and the GUI stops updating, this indicates that GUI has lost connection to the board. In this case it is recommended to click on the disconnect button, wait for the GUI status to change to disconnected and then click on connect. If the motor was spinning before GUI lost connection a connect would force the motor to stop.11) The parameters in the preflashed image have been tuned for light loads over the range for DC busvoltage generated from 110V AC line or 220v AC line. The motor can be loaded and the result in case of load observed on the GUI.12) Once finished evaluating, click on the stop button to stop the motor. Once motor comes to a full stopclick on disconnect. Now Switch off/ Unplug the AC power. As the capacitors are charged the LED onthe control card may remain ON for a couple of seconds. Do not touch the board unless these LED’s go OFF. You may hear a discharging noise as the capacitors discharge.13) All future updates/enhancements to the GUI and/or Flash image would be made available throughcontrolSUITE.14) Please note that the Flash image is meant for quick demonstration purpose only. For a more detailedexplanation and understanding on the control algorithm being used and tradeoffs refer to the individual project for the motor type and control method being implemented undercontrolSUITE\developement_kits\HVMotorCtrl+PFCKit.ReferencesFor more information please refer to the following:•Download and Install ControlSUITE/controlSUITE•F28xxx User’s Guides/f28xuserguidesAfter controlSUITE install• HighVoltageMotorCtrl+PFC HW Reference Guide – provides detailed information on the High voltage motor control and PFC kit hardware.controlSUITE\development_kits\HVMotorCtrl+PfcKit\~Docs•HighVoltageMotorCtrl+PFC-HWdevPkg – a folder containing various files related to the hardware on the kit board (schematics, bill of materials, Gerber files, PCB layout, etc).controlSUITE\development_kits \HVMotorCtrl+PFCKit\~HVMotorCtrl+PfcKit_HWdevPkg\•HighVoltageMotorCtrl+PFC How to Run Guide- presents more information on the HW setup required and software installation that need to be done for using projects associated with the kit.controlSUITE\development_kits \HVMotorCtrl+PFCKit\~Docs•All the projects for different motors and sensored and sensorless implementations can be found at controlSUITE\development_kits \HVMotorCtrl+PFCKit\ HVACISensorless\ HVACISensored\ HVPMSensorless\ HVPMSensored\ HVBLDCSensorless\ HVBLDCSensored。
潍柴汽车产品说明书

I
INDEX
v w
Main Menu
Index
Changing Oil How to......................................... 147 When to...................................Байду номын сангаас... 135
Charging System Indicator .... 46, 186 Checklist, Before Driving............. 123 Child Safety ...................................... 29
Booster Seats ............................... 38 Child Seats.................................... 34 Important Safety Reminders ...... 32 Larger Children ........................... 37 Risk with Airbags ........................ 30 Small Children.............................. 33 Child Seats........................................ 34 Cleaning Seat Belts........................ 160 Clock.................................................. 54 Clutch Fluid.................................... 154 CO in the Exhaust ......................... 207 Cold Weather, Starting in ............. 124 Compact Spare Tire....................... 174 Consumer Informationˎ................ 212 Controls, Instruments and.............. 43 Convertible Top ............................... 70 Convertible Top Cover................ 72 Lowering the Convertible Top... 70 Maintenance................................. 74 Raising the Convertible Top ...... 73
悍马汽车部件维修指南说明书

Cutoff Indicator Works........... 49
How Your Front Airbags Work.......................................... 46
CONTINUED
I
v w
Main Menu
Index
Bulb Replacement Back-up Lights ........................... 206 Stop Light ................................... 206 Cargo Area Light ....................... 211 Front Parking Lights................. 205 Front Side Marker Lights......... 204 Headlights .................................. 202 High-mount Brake Light .......... 207 Interior Lights............................ 210 License Plate Lights.................. 209 Side Marker Lights ................... 204 Side Turn Signal Lights ............ 208 Specifications ............................. 251 Turn Signal Lights..................... 203
三菱电机家用中央空调室内机风管机安装说明书

PART NO. 9373385066-02E n g l i s hINSTALLATION MANUALVRF SYSTEM INDOOR UNIT Duct TypeFor authorized service personnel only.Contents1. SAFETY PRECAUTIONS .............................................22. ABOUT THE UNIT2.1. Precautions for using the R410A refrigerant ..........22.2. Special tool for R410A ............................................22.3. Accessories ............................................................22.4. Optional parts .........................................................33. INSTALLATION WORK3.1. Selecting an installation location ............................33.2. Installation dimensions ...........................................43.3. Installing the unit ....................................................44. PIPE INSTALLATION4.1. Selecting the pipe material .....................................74.2. Pipe requirement ....................................................74.3. Flare connection (pipe connection) ........................74.4. Installing heat insulation .........................................85. INSTALLING DRAIN PIPES (8)6. ELECTRICAL WIRING6.1. Electrical requirement ..........................................106.2. Wiring method ......................................................116.3. Unit wiring ............................................................116.4. Connection of wiring .............................................136.5. Air fl ow changing ..................................................137. FIELD SETTING7.1. Setting the address ..............................................147.2. Custom code setting ............................................157.3. Function setting ....................................................168. TEST OPERATION8.1. Test operation using PCB (Outdoor unit) .............178.2. Test operation using Remote Controller ...............179. CHECK LIST ...............................................................1710. ERROR CODES (17)1. SAFETY PRECAUTIONS• Be sure to read this Manual thoroughly before installation.• The warnings and precautions indicated in this Manual contain important information pertaining to your safety. Be sure to observe them.• Hand this Manual, together with the Operating Manual to the customer.Request the customer to keep them on hand for future use, such as for relocating or repairing the unit.WARNING!This mark indicates procedures which, if improperly performed, might lead to the death or serious injury of the user.• Request your dealer or a professional installer to install the unit in accordance with this Manual.An improperly installed unit can cause serious accidents such as water leakage, electric shock, or fi re.If the unit is installed in disregard of the instructions in the Installation Manual, it will void the manufacturer’s warranty.• Do not turn ON the power until all work has been completed.Turning ON the power before the work is completed can cause serious accidents such as electric shock or fi re.• If refrigerant leaks while work is being carried out, ventilate the area.If the refrigerant comes in contact with a flame, it produces a toxic gas.• Installation work must be performed in accordance with national wiring standards by authorized personnel only.CAUTION!This mark indicates procedures which, if improperly performed, might possibly result in personal harm to the user, or damage to property.2. ABOUT THE UNIT2.1. Precautions for using the R410ArefrigerantWARNING• Do not introduce any substance other than the prescribed refrigerant into the refrigeration cycle.If air enters the refrigeration cycle, the pressure in the refrigeration cycle will become abnormally high and cause the piping to rupture.• If there is a refrigerant leakage, make sure that it does not exceed the concentration limit.If a refrigerant leakage exceeds the concentration limit, it can lead to accidents such as oxygen starvation.• Do not touch refrigerant that has leaked from the refrigerant pipe connections or other area. Touching the refrigerant directly can cause frostbite.• If a refrigerant leakage occurs during operation, immediately vacate the premises and thoroughly ventilate the area.If the refrigerant comes in contact with a flame, it produces a toxic gas.2.2. Special tool for R410AWARNING• To install a unit that uses the R410A refrigerant, use dedicated tools and piping materials that have been manufactured specifi cally for R410A use.Because the pressure of the R410A refrigerant is approximately 1.6 times higher than the R22, failure to use dedicated piping material or improper installation can cause rupture or injury.Furthermore, it can cause serious accidents such as water leakage, electric shock, or fi re.Tool name Contents of changeGauge manifold• Pressure is huge and cannot bemeasured with a conventional gauge.To prevent erroneous mixing of otherrefrigerants, the diameter of each porthas been changed.It is recommended to use a gaugemanifold with a high pressure displayrange –0.1 to 5.3 MPa and a lowpressure display range –0.1 to 3.8 MPa. Charging hose• To increase pressure resistance, thehose material and base size werechanged.Vacuum pump• A conventional vacuum pump can beused by installing a vacuum pumpadapter.Gas leakagedetector• Special gas leakage detector for HFCrefrigerant R410A.2.3. AccessoriesWARNING• For installation purposes, be sure to use the parts supplied by the manufacturer or other prescribed parts.The use of non-prescribed parts can cause serious accidents such as the unit to fall, water leakage, electric shock, or fi re.• The following installation parts are furnished. Use them as required.• Keep the Installation Manual in a safe place and do not discard any other accessories until the installation work has been completed.En-2Binder (Medium)Coupler heat insulation (Small)Coupler heat insulation (Large)Special nut A(Large flange)Special nut B(Small flange)HangerHose bandDrain hose insulationEn-4CAUTION• Do not use the unit for special purposes, such as storing food, raising animals, growing plants, or preserving precision devices or art objects.It can degrade the quality of the preserved or stored objects.• Do not install where there is the danger of combustible gas leakage.• Do not install the unit near a source of heat, steam, or fl ammable gas.• Install the unit where drainage does not cause any trouble.• Install the indoor unit, outdoor unit, power supply cable, transmission cable, and remote control cable at least 1 m away from a television or radio receivers. The purpose of this is to prevent TV reception interference or radio noise.(Even if they are installed more than 1 m apart, you could still receive noise under some signal conditions.)• If children under 10 years old may approach the unit, take preventive measures so that they cannot reach the unit.• Decide the mounting position with the customer as follows:(1) Install the indoor unit on a place having a suf fi cient strength so that it withstands against the weight of the indoor unit.(2) The inlet and outlet ports should not be obstructed; the air should be able to blow all over the room.(3) Leave the space required to service the air conditioner.(4) A place from where the air can be distributed evenly throughout the room by the unit.(5) Install the unit where connection to the outdoor unit is easy.(6) Install the unit where the connection pipe can be easily installed.(7) Install the unit where the drain pipe can be easily installed.(8) Install the unit where noise and vibrations are not ampli fi ed.(9) Take servicing, etc., into consideration and leave the spaces. Also install the unit where the fi lter can be removed.(10) Providing as much space as possible between the indoorunit and the ceiling will make work much easier.(11) If installing in a place where its humidity exceeds 80%, useheat insulation to prevent condensation.3.2. Installation dimensions• Provide the space around the unit as shown in the following fi gure.400 mm or more 150 mm or more ❈1❈1 400mm or more when drain from drain pipe.• Provide a service hole for inspection purposes.• Do not place any wiring or illumination in the service space, as they will impede service.• When an air fi lter is installed on the air inlet, provide enough service space to replace the fi lter.AirAirService holeControl box300 mmor more 500 mm or more500 m m o r m o r e100 m mAir AirService spaceControl box300 mm or more1,550 mm or more500 m m o r m o r e100 m mIntake panel3.3. Installing the unitWARNING• Install the air conditioner in a location which can withstand a load do at least fi ve times the weight of the main unit and which will not amplify sound or vibration. If the installation location is not strong enough, the indoor unit may fall and cause injuries.• If the job is done with the panel frame only, there is a risk that the unit will come loose. Please take care.3.3.1. Installing the hangersHanging bolt installation diagram.(Top side)(Right side)270 m mA i rA i rWARNING• When fastening the hangers, make the bolt positionsuniform.740 mm477 mmA i rA i r1,135 m m1,177 m mDuct installation pattern ( CUT PART)Cut Cut Cut Cut(2) Turn up the insulation around the points to be cut ac-cording to the outlet port shape working points so thatthe insulation does not stick out at the(3) Cut with nippers and remove the sheet metal.• The screw holes to install the flange are located behind the round cutouts in the insulation.Duct4.PIPE INSTALLATIONCAUTION• Be more careful that foreign matter (oil, water, etc.) does not enter the piping than with refrigerant R410A models. Also, when storing the piping, securely seal the openings by pinching, taping, etc.• While welding the pipes, be sure to blow dry nitrogen gas through them.4.1. Selecting the pipe materialCAUTION• Do not use existing pipes.• Use pipes that have clean external and internal sides without any contamination which may cause trouble during use, such as sulfur, oxide, dust, cutting waste, oil, or water.• It is necessary to use seamless copper pipes.Material : Phosphor deoxidized seamless copper pipesIt is desirable that the amount of residual oil is less than 40 mg/10 m.• Do not use copper pipes that have a collapsed, deformed, or discolored portion (especially on the interior surface). Otherwise, the expansion valve or capillary tube may become blocked with contaminants.• Improper pipe selection will degrade performance. As an air conditioner using R410A incurs pressure higher than when using conventional refrigerant, it is necessary to choose adequate materials.• Thicknesses of copper pipes used with R410A are as shown in the table.• Never use copper pipes thinner than those indicated in the table even if they are available on the market. Thicknesses of Annealed Copper Pipes (R410A)Pipe outside diameter [mm (in.)]Thickness [mm]6.35 (1/4)0.809.52 (3/8)0.8012.70 (1/2)0.8015.88 (5/8) 1.0019.05 (3/4) 1.204.2. Pipe requirementCAUTION• Refer to the Installation Manual of the outdoor unit for description of the length of connecting pipe or for difference of its elevation.• Use pipe with water-resistant heat insulation.CAUTION• Install heat insulation around both the gas and liquid pipes.Failure to do so may cause water leaks.Use heat insulation with heat resistance above 120 °C.(Reverse cycle model only)In addition, if the humidity level at the installation location of the refrigerant piping is expected to exceed 70 %, install heat insulation around the refrigerant piping. If the expected humidity level is 70-80 %, use heat insulation that is 15 mm or thicker and if the expected humidity exceeds 80 %, use heat insulation that is 20 mm or thicker. If heat insulation is used that is not as thick as specified, condensation may form on the surface of the insulation. In addition, use heat insulation with heat conductivity of 0.045 W/(m·K) or less (at20 °C).4.3. Flare connection (pipe connection)WARNING• Tighten the flare nuts with a torque wrench using the specified tightening method. Otherwise, the flare nuts could break after a prolonged period, causing refrigerant to leak and generate a hazardous gas if the refrigerant comes into contact with a fl ame.4.3.1. Flaring• Use special pipe cutter and fl are tool exclusive for R410A. (1) Cut the connection pipe to the necessary length with apipe cutter.(2) Hold the pipe downward so that cuttings will not enter thepipe and remove any burrs.(3) Insert the fl are nut (always use the fl are nut attached tothe indoor and outdoor units respectively) onto the pipeand perform the flare processing with a flare tool. Usethe special R410A flare tool, or the conventional flaretool. Leakage of refrigerant may result if other fl are nutsare used.(4) Protect the pipes by pinching them or with tape toprevent dust, dirt, or water from entering the pipes.BDieAPipeCheck if [L] is flared uniformlyand is not cracked or scratched.LEn-7Width across4.3.2. Bending pipesIf pipes are shaped by hand, be careful not to collapsethem.Do not bend the pipes in an angle more than 90°.When pipes are repeatedly bend or stretched, the material will harden, making it dif more.Do not bend or stretch the pipes more than three times.Connection pipeTorque wrenchIndoor unit pipe Flare nutHolding wrenchTighten with two wrenches.(Accessories)Binder (Large)(Accessories)Heat insulationheat insulation.CAUTION• After checking for gas leaks (refer to the Installation Manual of the outdoor unit), perform this section.• Install heat insulation around both the large (gas) and small (liquid) pipes. Failure to do so may cause water leaks.INSTALLING DRAIN PIPESUse general hard polyvinyl chloride pipe and connect it withadhesive (polyvinyl chloride) so that there is no leakage.Always heat insulate the indoor side of the drain e a drain hose that matches the size of the drain pipe.Do not perform a rise, trap and air bleeding.Provide a downward gradient (1/100 or more).Provide supporters when long pipes are installed.Use an insulation material as needed, to prevent the pipes from freezing.Install the pipes in a way that allows for the removal of the control box.Drain port Drain cap(Accessories)• Cover the drain cap with the drain hose insulation.Drain hose insulation (Accessories)Unit Unit Drain hose insulation (Accessories)Drain cap0 mmINSTALL THE DRAIN HOSEWorking procedure1) Install the attached drain hose to the drain port of the body.Install the hose band from the top of the hose within the graphic display area. Secure fi rmly with the hose brnd.2) Use vinyl adhesive agent to glue the drain piping (PVC pipe VP25) which is prepared on site or socket. (Apply color ad-hesive agent evenly until the gauge line and seal)3) Check the drainage.4) Install the heat insulation.5) Use the attached heat insulation to insulate the drain port and band parts of the body.DrainhoseArrange the drain hoselower than this portionTrapNO GOODOKRiseNO GOOD1.5 to2.0 mAir bleedingNO GOODCAUTION• Always check that the drain cap is installed to the unused drain port and is fastened with the binder.If the drain cap is not installed, or is not suffi ciently fastened by the binder, water may drip during the cooling operation.6.ELECTRICAL WIRING6. E L E C T R I C A L WWARNING• Electrical work must be performed in accordance with this Manual by a person certified under the national or regional regulations. Be sure to use a dedicated circuit for the unit.An insufficient power supply circuit or improperly performed electrical work can cause serious accidents such as electric shock or fi re.• Before starting work, check that power is not being supplied to the indoor unit and outdoor unit.• For wiring, use the prescribed type of wires, connect themEn-116.2. Wiring method(EXAMPLE)PR SUPPLY OUTDOOR UNIT TRANSMISSIONTRANSMISSION TRANSMISSION POWER SUPPLYPOWER SUPPLY POWER SUPPLYPOWER SUPPLYPOWER SUPPLYREMOTE CONTROL UNIT (MASTER)REMOTE CONTROL UNIT (SLAVE)REMOTE CONTROL UNITREMOTE CONTROLINDOOR UNITINDOOR UNIT INDOOR UNITBREAKERBREAKER POWER SUPPLY REMOTE CONTROLPOWER SUPPLY REMOTE CONTROLBREAKER BREAKERTRANSMISSION 6.3. Unit wiring• Before attaching the cable to terminal block.6.3.1. Power supply cablePower supply cable25 mm Earth cable30m m A. For solid core wiring(1) To connect the electrical terminal, follow the below diagram and connect after looping it around the end of the cable. (2) Use the speci fi ed cables, connect them securely, and fasten them so that there is no stress placed on the terminals.(3) Use an appropriate screwdriver to tighten the terminal screws. Do not use a screwdriver that is too small, otherwise, the screw heads may be damaged and prevent the screws from being properly tightened.(4) Do not tighten the terminal screws too much, otherwise, the screws may break.(5) See the table for the terminal screw tightening torques.(6) Please do not fi x two power supply cables with one screw.St ri p 25 mmLoop Screw with spe-cial washerScrew with special washer Cable end(Loop)Cable end (Loop)CableCableTerminal blockWARNING• When using solid core cables, do not use the ring terminal. If you use the solid core cables with the ring terminal, the ring terminal's pressure bonding may malfunction and cause the cables to abnormally heat up.B. For strand wiring(1) Use ring terminals with insulating sleeves as shown in the fi gure below to connect to the terminal block.(2) Securely clamp the ring terminals to the cables using an appropriate tool so that the cables do not come loose.(3) Use the speci fi ed cables, connect them securely, and fasten them so that there is no stress placed on the terminals.(4) Use an appropriate screwdriver to tighten the terminal screws. Do not use a screwdriver that is too small, otherwise, the screw heads may be damaged and prevent the screws from being properly tightened.(5) Do not tighten the terminal screws too much, otherwise, the screws may break.(6) See the table for the terminal screw tightening torques.(7) Please do not fi x two power supply cables with one screw.St r i p10 mmSleeveScrew with special washerScrew with special washerRing terminalCableCableTerminal blockRing terminalRing terminalWARNING• Use ring terminals and tighten the terminal screws to thespeci fi ed torques, otherwise, abnormal overheating may be produced and possibly cause heavy damage inside the unit.Tightening torqueM4 screw(Power supply /L, N, GND) 1.2 to 1.8 N·m (12 to 18 kgf·cm)En-126.3.2. Transmission and Remote control cableTransmission cableShielded cable (No fi lm)20 mm 45m mRemote control cable20 m m• Connect remote control and transmission cables as shown in Fig. A.Fig. AScrew Terminal blockCableCable of the same caliber: OKCable of the different caliber: NO GOODWARNING• Tighten the terminal screws to the specified torques, otherwise, abnormal overheating may be produced and possibly cause heavy damage inside the unit.Tightening torqueM3.5 screw(Transmission /X1, X2)(Remote control /Y1, Y2, Y3)0.8 to 1.0 N·m (8 to 10 kgf·cm)CAUTION• To peel the fi lm from the lead cable, use a dedicated tool that will not damage the conductor cable.• When installing a screw on the terminal block, do not cut the cable by overtightening the screw. On the other hand, an undertightened screw can cause faulty contact, which will lead to a communication failure.En-136.4. Connection of wiring(1) Remove the control box cover and install each connection cable.ScrewControl box cover(2) After wiring is complete, secure the remote control cable, connection cable, and power cable with the cable clamps.Power supply cable (Field supply)Binder (Medium) (Accessories)Binder (Medium) (Accessories)Remote control cable Transmission cable (Field supply)Binder (Medium) (Accessories)L, N:Power supply cableX1, X2:Transmission cableRemote control cable Y1:Red Y2:White Y3:Black6.5. Air fl ow changingWhen using the ARXB24/30/36/45L model with external Static Pressure under 40 Pa, the Wire (FAN MOTOR) must be replaced as explained below.Replacement method (1) Remove the cover.(2) Remove the Wire (TYPE A) connector from Wire (FAN MOTOR).(3) Remove the Wire (TYPE A) connector from CN4 of the PCB.(4) Insert the Wire (TYPE B) connector into CN4 of the PCB.(5) Insert the Wire (TYPE B) connector into Wire (FAN MOTOR).(6) Insert the cover.En-147.1. Setting the addressCAUTION• Use an insulated screwdriver to set the dip switches.Rotary switch Example: “0”Dip switch “SET 3”Rotary switch Example: “0”SW 1SW 2SW 3SW 4SettingSetting rangeType of switchIndoor unit address0–63Setting example2IU AD X 10 IU AD X 1Refrigerant circuit address0–99Setting example 63REF AD X 10 REF AD X 1(1) Indoor unit addressRotary switch (IU AD x 1)...Factory setting “0” Rotary switch (IU AD x 10)...Factory setting “0”When connecting multiple indoor units to one refrigerant system, set the address at IU AD SW as shown in the T able A.(2) Refrigerant circuit addressRotary switch (REF AD x 1)...Factory setting “0” Rotary switch (REF AD x 10)...Factory setting “0”In the case of multiple refrigerant systems, set REF AD SW as shown in the Table A for each refrigerant system.Set to the same refrigerant circuit address as the outdoor unit.• If working in an environment where the wireless remote controller can be used, the addresses can also be set using the remote controller.• If setting the addresses using the wireless remotecontroller, set the indoor unit address and refrigerant circuit address to “00”.(For information on setting using the wireless remote controller.)CoverWire (Fan motor)External Static Pressure and Required Connector TypeType ABExternal Static Pressure40 – 80 Pa0 – 40 PaWire123456123451 BLACK2 WHITE3 PINK4 PURPLE5 BLUEARXB24 ARXB30 ARXB361 BLACK 2 WHITE 3 RED 4 BLUE 5 PINK 6 PURPLEARXB451 BLACK2 WHITE3 RED4 PINK5 PURPLE6 BLUERemarkFactory setting (Standard static pressure)Accessories (Low static pres-sure)7. FIELD SETTING• Refer to the following three items for setting the FIELD SETTING address. The respective settings are included below.(1) IU AD, REF AD SW settings ............ T his section (2) Remote control settings ................... R efer to the wired orwireless remote control manual for detailed set-ting information. (Set IU AD, REF AD SW to 0)(3) Automatic address settings .............. R efer to the indoor unitmanual for detailed set-ting information. (Set IU AD, REF AD SW to 0)CAUTION• Be sure to turn OFF the power before performing the fi eld setting.Table AAddressRotarySwitch SettingAddressRotarySwitch SettingRefrigerant circuit REF AD SWIndoor unitIU AD SW x 10x 1x 10x 1000000 101101 202202 303303 404404 505505 606606 707707 808808 909909 10101010 11111111 12121212.. ................99996363 Do not set the indoor unit address (IU AD SW) at 64 to 99. It may result failure.RC AD SWRC AD SW1RC AD SW2RC AD SW3Indoor unitRemotecontrollerIndoor unit Indoor unit Indoor unitA B C DA B C D IndoorunitRemotecontrollerConfusionCode change(3) Remote controller addressRotary switch (RC AD SW)...Factory setting “0”When connecting multiple indoor units to one standard wired remote controller, set the address at RC AD SW in sequence from 0.SettingSettingrangeType of switchRemotecontrolleraddress0–15SettingexampleRC ADExample If 4 indoor units are connected.RC AD SW01234567 Address01234567RC AD SW89A B C D E F Address891011121314157.2. Custom code settingSelecting the custom code prevents the indoor unit mix-up.(Up to 4 codes can be set.)Perform the setting for both the indoor unit and the remote controller.En-15En-16Function detailsFunctionFunction numberSetting number DefaultDetailsFilter indicator interval1100Default ○Adjust the fi lter cleaning interval noti fi cation. If the noti fi cation is too early, change to setting 01. If the noti fi cation is too late, change to setting 02.01Longer 02Shorter Filter indicator action1300Enable ○Enable or disable the fi lter indicator. Setting 02 is for use with a central remote control.01Disable 02Display only on central remote control Horizontal swing air fl ow direction2400Default ○Adjust the horizontal swing air fl ow direction.(For horizontal swing equipped models)01Left half 02Right half Cool air temperature trigger3000Default ○Adjust the cool air trigger temperature. To lower the trigger temperature, use setting 01. To raise the trigger temperature, use setting 02.01Adjust (1)02Adjust (2)Hot air temperature trigger3100Default ○Adjust the hot air trigger temperature. To lower the trigger temperature by 6 degrees C, use setting 01. To lower the trigger temperature by 4 degrees C, use setting 02. To raise the trigger temperature, use setting 03.01Adjust (1)02Adjust (2)03Adjust (3)Auto restart4000Enable Enable or disable auto-matic system restart after a power outage.01Disable○External control4600Start/Stop○Allow an external control-ler to start or stop the system, or to perform an emergency shutdown.* I f an emergency shut-down is performed from an external controller, all refrigerant systems will be disabled.01Emergen-cy stopError report target4700All ○Change the target for reporting errors. Errors can either be reported in all locations, or only on the wired remote.01Display only on central remote control• Custom code setting for indoor unitSet the DIP SW SET 3 SW1, SW2, referring to the Table B.Dip switch “SET 3”SW 1SW 2SW 3SW 4OFFON Table BCustom codeA (Factory setting)BC D DIP SWSET 3 SW1OFF ON OFF ON DIP SW SET 3 SW2OFFOFFONON7.3. Function setting• FUNCTION SETTING can be performed with the wired or wireless remote control.(The remote control is optional equipment)• Refer to the wired or wireless remote control manual for detailed setting information. (Set IU AD, REF AD SW to 0)• Refer to “7.1. Setting the address” for indoor unit ad-dress and refrigerant circuit address settings.• T urn the power of the indoor unit ON before starting the setting.* Turning on the power indoor units initializes EEV , so make sure the piping air tight test and vacuuming have been conducted before turning on the power.* Also check again to make sure no wiring mis-takes were made before turning on the power.。
索尼电子产品用户手册说明书
IndexAccessoriesInstallation................................... 95ACCESSORY(Ignition Key Position).............. 46AddingAutomatic TransmissionFluid........................................ 128Brake Fluid................................ 130Clutch Fluid............................... 131Engine Coolant......................... 123Engine Oil.................................. 119Manual Transmission Fluid... 129Power Steering Fluid .............. 132Windshield Washer fluid......... 127Additional Safety Information..... 15Door Locks.................................. 15Driving with Pets ....................... 16Seat-back Position..................... 15Storing Cargo Safely ................. 16Additives, Engine Oil.................. 120AdjustmentsMirrors......................................... 55Seats.............................................. 50Steering Wheel (41)Airbag (SRS).................................... 11Air Cleaner.................................... 133Air Conditioning............................. 66Maintenance.............................. 141Usage............................................ 66Air Outlets (Vents)......................... 64Air Pressure, Tires ...................... 142Alcohol and Drugs.......................... 23Alcohol in Gasoline ........................ 88Antifreeze...................................... 123Anti-lock Brakes (ABS)Description................................ 188Indicator Light...................32, 108Operation................................... 108Anti-theft Steering ColumnLock.............................................. 46Appearance Care.......................... 155Ashtrays........................................... 60Audio System.................................. 71Automatic. Speed Control............. 42Automatic Transmission............ 102Capacity, Fluid.......................... 186Checking Fluid Level.............. 128Shifting....................................... 102Shift Lever Positions............... 102Shift Lock Release. (105)BatteryCharging System Light............. 31Jump Starting............................ 171Maintenance.............................. 136Specifications............................ 187Before Driving................................ 87Belts, Seat.......................................... 4Body Repair................................... 161BrakesAnti-lock System (ABS).......... 107Break-in, New Linings.............. 88Fluid............................................ 130Light, Burned-out.................... 148Parking......................................... 57System Light............................... 31Wear Indicators........................ 106Brakes, ABSDescription................................ 188Operation................................... 108System Indicator................32, 108Braking System............................ 106Break-in, New Car . (88)CONTINUEDIndexBrightness Control,Instruments................................. 38Brights, Headlights........................ 37Bulb ReplacementBack-up Lights (151)Brake Lights .....................150,151Front Parking Lights .............. 149Front Side Marker Lights...... 149Headlights................................. 148High-mount Brake Light........ 151License Plate Lights................ 152Rear Side Marker Lights........ 150Specifications............................ 187Turn Signal Lights .................. 149Bulbs, Halogen (148)Cables, Jump Starting With ....... 172Capacities Chart........................... 186Carbon Monoxide Hazard ............ 24Cargo, Loading............................... 96Cassette PlayerCare............................................... 85Operation...............................75, 82CAUTION, Explanation of (ii)Certification Label....................... 184Chains............................................. 147Change OilHow to........................................ 121When to...................................... 113Changing a Flat Tire................... 165Changing Engine Coolant........... 124Charging System Light.........31, 176Check Engine Light..............32, 177CheckingAutomatic TransmissionFluid........................................ 128Battery Condition..................... 136Brake Fluid................................ 130Clutch Fluid............................... 131Engine Belts.............................. 142Engine Coolant......................... 123Engine Oil.................................. 119Fuses........................................... 179Manual Transmission Fluid... 129Power Steering Fluid .............. 132Checklist, Before Driving............. 98Child Safety..................................... 17Cigarette Lighter........................... 60Cleaner, Air.. (133)CleaningExterior...................................... 156Interior ....................................... 159Seat Belts................................... 159Vinyl............................................159CLEAN Light................................. 85Clock, Setting the........................... 58Clutch Fluid................................... 131CO in the Exhaust........................ 190Cold Weather, Starting in........... 100Compact Spare.............................. 164Console Compartment................... 59Consumer Information................ 195Controls, Instruments and............ 27CoolantAdding........................................ 123Checking.................................... 123Proper Solution......................... 123Temperature Gauge.................. 35Corrosion Protection................... 160Crankcase Emission ControlSystem........................................ 190Cruise Control Operation.............. 42Cup Holder....................................... 59Customer Relations Office.........195IndexDANGER, Explanation of.............. ii Dashboard........................................ 28Daytime Running Lights.............. 37Dead Battery, What to Do........... 171Defects, Reporting Safety ............ 25Defogger, Rear Window ............... 40Defrosting the Windows............... 70DEXRON® II AutomaticTransmission Fluid.................. 128Dimensions.................................... 186Dimming the Headlights .............. 37DipstickAutomatic Transmission........ 128Engine Oil.................................. 119Directional Signals......................... 38Disabled, Towing Your Car If ... 182Disc Brake Wear Indicators....... 106Disposal of Used Oil..................... 122DoorsLocking and Unlocking............ 47Power Door Locks ..................... 47DOT Tire Quality Grading......... 145Downshifting, 5-speed ManualTransmission (101)Driving (97)Economy...................................... 94In Bad Weather......................... 108In Foreign Countries.. (89)Economy, Fuel................................ 94Emergencies on the Road........... 163Battery, Jump Starting............ 171Changing a Flat Tire............... 165Charging System Light........... 176Check Engine Light................. 177Checking the Fuses................. 180Low Oil Pressure Light........... 175Malfunction IndicatorLamp....................................... 177Manually Closing Moonroof .. 178Overheated Engine.................. 173Emergency Brake.......................... 57Emergency Flashers...................... 40Emission Controls........................ 190EngineBelts............................................ 142Check Light........................32, 177Coolant Temperature Gauge (35)Malfunction IndicatorLamp.................................32, 177Oil Pressure Light..............31, 175Oil, What Kind to Use ............. 120Overheating............................... 174Specifications............................ 186Ethanol in Gasoline........................ 88Evaporative EmissionControls...................................... 190Exhaust Fumes............................... 24Expectant Mothers, Use ofSeat Belts by................................ 10Exterior, Cleaning the.. (156)Fabric, Cleaning........................... 159Fan, Interior.................................... 66Fan, Radiator.................................. 26Features, Comfort andConvenience................................ 63Filling the Fuel Tank.................... 90FiltersFuel (134)Oil (121)CONTINUEDIndexFirst Gear, Shifting...................... 1015-speed Manual TransmissionChecking Fluid Level.............. 1295-speed Manual Transmission,Shifting the................................ 101Flashers, Hazard Warning ........... 40Flat Tire, Changing a.................. 165FluidsAutomatic Transmission........ 128Brake.......................................... 130Clutch ......................................... 131Manual Transmission.............. 129Power Steering......................... 132Windshield Washer.................. 127FM Stereo RadioReception............................... 72, 78Folding Rear Seat........................... 51Foreign Countries, Driving in...... 89Four-way Flashers......................... 40Front End, Towing by Emergency Wrecker...................................... 182Fuel................................................... 88Fill Door and Cap ....................... 90Filter........................................... 134Gauge............................................ 35Octane Requirement.. (88)Oxygenated................................. 88Tank, Filling the ........................ 90Fuses, Checking the .. (179)Gas Mileage, Improving................ 94Gasohol.............................................88Gasoline............................................ 88Filter........................................... 134Gauge............................................35Octane Requirement................. 88Tank, Filling the ........................ 90Gas Station Procedures................. 90GaugesEngine Coolant Temperature.. 35Fuel............................................... 35Gearshift Lever PositionsAutomatic Transmission........ 1025-speed Manual Transmission ..................................................101Glass Cleaning.............................. 160Glove Box . (57)Halogen Headlight Bulbs............ 148Hazard Warning Flashers ............ 40HeadlightsDaytime Running Lights.......... 37High Beam Indicator................. 33High Beams, Turning on.......... 37Low Beams, Turning on........... 37Reminder Chime........................ 37Replacing Halogen Bulbs ....... 148Turning on................................... 37Heating and Cooling...................... 64High Altitude, Starting at.......... 100High-Low Beam Switch ............... 37Hood, Opening the.......................... 91Horn.................................................. 45Hot Coolant, Warning about...... 123Hydraulic Clutch.......................... 131Hydroplaning . (109)Identification Number,Vehicle ....................................... 184If Your Car Has to be Towed.....182IndexIgnitionKeys..............................................45Switch........................................... 46Timing Control System........... 191Indicator Lights, InstrumentPanel.............................................29Infant Restraint.............................. 19Inflation, Proper Tire .................. 143Inside Mirror................................... 55Inspection, Tire............................. 142Instrument Panel............................ 28Instrument Panel Brightness....... 38Interior Cleaning.......................... 159Interior Lights................................ 61Introduction. (i)Jacking up the Car....................... 166Jack, Tire....................................... 165Jump Starting.. (171)Keys (45)Label, Certification...................... 184Lane Change, Signaling................ 38Lap/Shoulder Belts.......................... 6Lap Belt.............................................. 6Leaking of Exhaust into Car ....... 24Lighter, Cigarette.......................... 60LightsBulb Replacement.................... 148Indicator....................................... 29Parking......................................... 37Turn Signal................................. 38Loading Cargo................................ 96LOCK (Ignition Key Position)..... 46LocksAnti-theft Steering Column..... 46Fuel Fill Door.............................. 90Glove Box.................................... 57Power Door.................................. 47Trunk ........................................... 48Low Coolant Level....................... 123Lower Gear, Downshifting to a. 101Low Oil Pressure Light.........31, 175Lubricant Specifications Chart. 186Luggage. (96)Maintenance................................... 111Periodic Items..............................117Record................................. 115-116Schedule.............................. 113-114Malfunction IndicatorLamp.....................................32, 177Manual Transmission.................. 101Manual Transmission Fluid....... 129Maximum Shift Speeds............... 102Meters, Gauges............................... 34Methanol in Gasoline..................... 89Mirrors, Adjusting......................... 55Moonroof ......................................... 54Closing Manually..................... 178Operation. (54)Neutral Gear Position ................. 104New Vehicle Break-in................... 88Normal Shift Speeds.................... 101NOTICE, Explanation of................ ii Numbers, Identification.. (184)CONTINUED。
维克ト恩能源生产力系统配置助手说明书
Overview of available AssistantsClick on the thumbnails to see the full screenshot.1. Assistants related to SolarMake sure to read Configuring solar systems with Quattros and Multis when configuring a solar system.ESS AssistantFor Energy Storage Systems (ESS). The Assistant manages the prioritising of Solar Power. Documentation.PV Inverter supportUse this Assistant in Off-grid systems that have AC-Coupled solar power: a grid-tie PV inverter connected to the AC out of a Multi or Quattro inverter/charger.Documentation.DEPRECATED Self-consumption Hub-1 - for dc-coupled systems2022-06-01assistants:overview_of_available_assistants https:///live/assistants:overview_of_available_assistants 13:41Note that Hub-1 is deprecated in favor of ESS.Hub-1 Assistant documentation.Hub-1 is only for hardware with new microprocessor (26 or 27).Hub-1 and Hub-2 Assistant notesDEPRECATED Self-consumption Hub-2 v3 - for ac-coupled systemsTake note of the factor 1.0 rule.Deprecated in favor of ESS.Only for hardware with new microprocessor (26 or 27).Hub-1 and Hub-2 Assistant notesDEPRECATED Self-consumption Hub-2 v2 - for ac-coupled systemsUse only on hardware with old microprocessor (19 or 20). On newer systems, use the version 3 instead, see above.Take note of the factor 1.0 rule.Note that all Hub-2 Assistant versions have been deprecated in favor of ESS.Hub-1 and Hub-2 Assistant notesDEPRECATED Self-consumption Hub-4Do not use Hub-4 for new installs. It is deprecated in favor of ESS.Hub-4 manual.Only for hardware with new microprocessor (26 or 27).2. Functional AssistantsGenerator start and stopAutomatically start and stop a generator based on battery state of charge andactual load of a system. Note that automatic genset start/stop functionality isalso available on the Virtual switch tab in VEConfigure, which is easier to workwith.This is one of the available options to automatically start and stop a generator using Victron equipment. See the auto-generator-start-stop document for an overview of all options. More general information about using a generator in combination with Victron is available here.This Generator start and stop Assistant is also the one to use to configure Ignore AC Input using Assistants.AC Current sensor2022-06-01assistants:overview_of_available_assistants https:///live/assistants:overview_of_available_assistants 13:41Reads PV Inverter current, using an AC Current sensor (CSE000100000),connected to a VE.Bus product. More information available in the AC Currentsensor manual.Silence fanDisable the fans at night with a simple external switch, to ensure a quiet night.Very useful for boats and motorhomes.Input current limit controlAutomatically set the input current limit to a predefined value based on thestate of an aux input or rpm measured with the 1140 interface. Used in thefollowing systems:1.A variable speed generator, flywheel generator or waterturbine, where the available AC powerdepends on the rpm. See the Interface 1140 (ASS030510000) manual for more information.Vehicles or boats that have two different types of shore plugs. One high power plug and one low 2.power plug. Use the assistant to automatically set the input current limiter based on the used plug.And there are more situations that can come to mind, for example a Multi connected behind a 3.transfer switch.Charge current controlSets the charge current to a predefined setpoint, based on the active AC Input(for Quattros) or the state of an aux input.Safety switchUsed to wire an emergency stop button to a VE.Bus system. DEPRECATED VE.Bus BMS supportDeprecated: per VE.Bus firmware version 489, this Assistant is no longer required. When installing a system with VE.Bus BMS, our advice is to first update the firmware of the inverter, using VictronConnect, and thereafter do the configuration. No Assistant needed.Required in combination with a VE.Bus BMS, used with our 12.8 V Lithium batteries. This Assistant communicates with the BMS and controls the Multi based on the BMS measurements.Two-Signal BMS support (previously called Lynx Ion BMS support)Required in combination with a Lynx Ion BMS, used with our 24 V 180 AhLithium system. This Assistant can also be used to control the Multi with a thirdparty Lithium system including BMS. See our PDF Connecting other lithiumbattery systems to Multis and Quattros for more information.3. Advanced AssistantsProgrammable relay2022-06-01assistants:overview_of_available_assistants https:///live/assistants:overview_of_available_assistants 13:41Relay lockerGeneral flag userDISQUSView the discussion thread.。
科尼变频器中英文手册

2 START-UP PROCEDURE 启动步骤 .................................................................................... 209
3 PARAMETER ADJUSTMENTS 参数调整 ............................................................................... 23
3.1 Control keypad operation 控制显示屏操作 .................................................................. 23 3.1.1 Navigation on the control keypad 控制显示屏演示 ......................................... 25 3.1.2 Value line editing 数值的编辑........................................................................ 25 3.1.3 Passwords 密码 ........................................................................................... 26 3.1.4 Monitoring 监控 .......................................................................................... 287
ACOPOS 8V1090.00-2 产品说明书

8V1090.00-21 General information•Modular mechanical design using plug-in modules•Integrated line filter•Integrated braking resistor•All connections are made using plug-in connectors•Integrated electronic restart inhibit2 Order dataTable 1: 8V1090.00-2 - Order dataTable 1: 8V1090.00-2 - Order data 3 Technical dataTable 2: 8V1090.00-2 - Technical data1)In the USA, TT and TN power mains are commonly referred to as "Delta/Wye with grounded Wye neutral".2)If the module is operated with a mains input voltage of 3x 230 VAC, then automatic nominal voltage detection doesn't work for the DC bus. The UDC_NOMINALparameter must be set to 325 [V] by the user in this case.3)Limit values from EN 61800-3 C3 (second environment).4)The permissible input voltage range is reduced when using motor holding brakes. The input voltage range should be selected so that the proper supplyvoltage for the motor holding brake can be maintained.5)The current consumption depends on the configuration of the ACOPOS servo drive.6)Valid in the following conditions: 400 VAC mains input voltage, nominal switching frequency, 40°C ambient temperature, installation elevation <500 m abovesea level.7)Value for the nominal switching frequency.8)If necessary, the stress of the motor isolation system can be reduced by an additional externally wired dv/dt choke. For example, the RWK 305 three-phasedv/dt choke from Schaffner () can be used. Important: Even when using a dv/dt choke, it is necessary to ensure that an EMC-compatible, low inductance shield connection is used!9)The module's electrical output frequency (SCTRL_SPEED_ACT * MOTOR_POLEPAIRS) is monitored to protect against dual use in accordance with ECregulation 428/2009 | 3A225. If the electrical output frequency of the module exceeds the limit value of 598 Hz uninterrupted for more than 0.5 s, then the current movement is aborted and error 6060 is output (Power element: Limit speed exceeded).10)OSSD (open signal switching device) signals are used to monitor signal lines for short circuits and cross faults.11)Continuous operation of ACOPOS servo drives at elevations ranging from 500 m to 2000 m above sea level is possible (taking the specified continuouscurrent reductions into consideration).12)Continuous operation of ACOPOS servo drives at ambient temperatures ranging from 40°C to max. 55°C is possible (taking the specified continuous currentreductions into consideration), but this will result in a shorter service life.4 Status indicatorsACOPOS servo drives are equipped with three LEDs for direct diagnostics:Figure 1: ACOPOS servo drives - Status indicatorsDescriptionGreen (lit)The module is operational andpresent and booted, no permanent or temporary errors).Green (blinking) 1)The module is not ready for operation.Examples:•No signal on one or both enable inputs•DC bus voltage outside the tolerance range•Overtemperature on the motor (temperature sensor)•Motor feedback not connected or defective•Motor temperature sensor not connected or defective•Overtemperature on the module (IGBT junction, heat sink, etc.)•Disturbance on networkOrange (lit)The module's power stage is enabled.Red (lit) 1)There is a permanent error on the module.Examples:•Permanent overcurrent•Invalid data in EPROMTable 3: LED status - ACOPOS servo drives1)Firmware V2.130 and higherIf no LEDs are lit, the ACOPOS servo drive is not being supplied with 24 VDC.Danger!After switching off the device, wait until the DC bus discharge time of at least five minutes has passed.The voltage currently on the DC bus must be measured with a suitable measuring device before be-ginning work. This voltage must be less than 42 VDC to rule out danger. An unlit Run LED does not indicate that voltage is not present on the device!4.1 LED statusThe following timing is used for the indication diagrams:Block size: 125 msRepeats after: 3000 msTable 4: Status changes when booting the operating system loaderTable 5: Error status with reference to the CAN plug-in module AC1101)Possible errors:- ACOPOS servo drive defect- Plug-in module defect- Plug-in module not inserted correctly in the slotTable 6: Error status with reference to the POWERLINK V2 plug-in module AC1141)Possible errors:- ACOPOS servo drive defect (plug-in module not recognized)- Plug-in module defect- Plug-in module not inserted correctly in the slot- Plug-in module functioning but not automatically recognized by the ACOPOS servo drive (old bootstrap loader)5 Dimension diagram and installation dimensionsHanging verticallyFigure 2: Dimension diagram and installation dimensions1)For proper air circulation, at least 80 mm clearance must be available above and below the ACOPOS servo drive.6 WiringFigure 3: ACOPOS 1022, 1045, 1090 - Pinout overview6.1 X1 - PinoutTable 7: X1 - Pinout1)The wiring is not permitted to exceed a total length of 30 m.6.2 X2 - PinoutTable 8: X2 - Pinout6.3 X3 - PinoutDanger!Servo drives are not permitted to be operated directly on IT and TN-S mains with a grounded phase conductor and protective ground conductor!Table 9: X3 - Pinout6.4 X4a, X4b - PinoutTable 10: X4a - Pinout1)If the holding brake is connected via an additional external relay contact (ground-in e.g. via the connections S1/S2) instead of via the internal transistor, thenthe internal quenching circuit has no effect! In this case, the customer must make sure that neither the relay contact nor the braking coil are damaged when switching off the brake. This can be done by interconnecting the coil or - better still - interconnecting the contact with a quenching circuit.Table 11: X4b - Pinout1)If the holding brake is connected via an additional external relay contact (ground-in e.g. via the connections S1/S2) instead of via the internal transistor, thenthe internal quenching circuit has no effect! In this case, the customer must make sure that neither the relay contact nor the braking coil are damaged when switching off the brake. This can be done by interconnecting the coil or - better still - interconnecting the contact with a quenching circuit.Danger!The connections for the motor temperature sensors and the motor holding brake are isolated circuits.Therefore, these connections are only allowed to be connected to devices or components with at least safe isolation in accordance with IEC 60364-4-41 or EN 61800-5-1.Caution!If B+ and B- are swapped when connecting the permanent magnet holding brakes, then the brakes cannot be opened! ACOPOS servo drives cannot determine if a holding brake is connected with reverse polarity!6.4.1 Wiring the connections for the motor holding brakeThe supply, activation and monitoring of the output for the motor holding brake can take place via the X4a connector in three different ways:Table 12: Activation for the external holding brake1)Both jumpers are already on the X4a connector delivered with the ACOPOS servo drives.2)External potential-free contacts can be connected between S1 and S2 as well as between S3 and S4. This makes it possible to activate the holding brakeusing an external safety circuit independent of the control integrated in the ACOPOS servo drive.3)The parameters are set using ParID 90 (1 ... internal monitoring active; 5 ... internal monitoring not active).4)Deactivation takes place using ParID 90 (5 ... internal monitoring not active).8V1090.00-2 6.5 X5 - PinoutTable 13: X5 - Pinout6.6 Additional protective ground connection (PE)The protective ground conductor is connected to the M5 threaded bolt provided using a cable lug.Terminal cross sectionsCable lug for M5 threaded boltTable 14: Protective ground conductor (PE) ACOPOS 1022, 1045, 1090Danger!Before turning on the servo drive, make sure that the housing is properly connected to ground (PE rail).The ground connection must be established even when testing the drive or operating it for a short time!8V1090.00-26.7 Input/Output circuit diagramFigure 4: TriggerFigure 5: LimitFigure 6: Enable8V1090.00-2Figure 7: ACOPOS 1022, 1045, 1090 - Input/Output circuit diagram。
UNIDRIVE SP 风扇电机电子驱动器快速启动指南说明书

UNIDRIVE SP Winding-unwinding solution with analogue referencesQuick start commissioning guide2Contents31 - GENERAL INFORMATION....................................................................41.1 - Operating principle..........................................................................41.2 - Operating modes : .........................................................................42 - SM MODULE INSTALLATION...............................................................52.1 - Access to terminal blocks...............................................................52.2 - Module installation..........................................................................53 - CONNECTIONS.....................................................................................63.1 - Power connection...........................................................................63.2 - Encoder connection........................................................................73.3 - Control connection..........................................................................84 - PARAMETER-SETTING......................................................................104.1 - Display and keyboard...................................................................104.2 - Selection and modification of a parameter ...................................114.3 - Access level..................................................................................124.4 - Modification of the operating mode...............................................124.5 - Return to winding/unwinding factory settings ...............................125 - COMMISSIONING................................................................................136 - SMARTCARD.......................................................................................227 - DIAGNOSTICS. (23)1 - GENERAL INFORMATIONThe SP EDL ANA solution offers all winding/ unwinding functions maintaining a constant tension of the product.It comprises :- a UNIDRIVE SP variable speed drive,- a SM-EDL ANA module.Note : If the Winding-unwinding solution is managed by a field bus (use of a SM-Field bus module), see the complete manual that may be created from the CD Rom supplied together with the drive.1.1 - Operating principleThe system operates exclusively in closed loop and it must be used with an asynchro-nous or with a synchronous motor with all ty-pes of encoders.With an axial drive, in order to preserve a constant tension on the product, irrespective of the coil diameter, it is necessary that the torque produced by the motor increases pro-portionally to the radius.The tension reference given by a potentio-meter is applied through an analogue input. By means of the line speed applied on ano-ther analogue input and of the angular speed issued from the encoder, a radius calculation is made.The tension reference multiplied by the ra-dius determines the torque that the motor must supply.To refine the adjustment of the tension on the product, it is possible to compensate the los-ses without load (mechanical losses) and the inertia during the transient periods.1.2 - Operating modes :- speed adjustment : product threading,- traction adjustment : winding or unwinding.456789102122237 - DIAGNOSTICS• Indications on winding-unwinding (read only parameters) :• Indications on trip stateIf the drive stops, the output bridge of the drive is inactive and the drive does not control any longer the motor.The upper display indicates " triP " and the lower display indicates the fault type.Note : For the other drive faults, see section K of the commissioning manual that may be set from CD-ROM.Parameter Indication Unit 0.10Measured motor speedmin -10.11Product radius mm0.12Line speedx 0.1 m.min -10.13T ension reference after limitationN 0.14Slow shaft rated torque x 0.1 N 0.15Control of C max /C n%Mnemonic display Winding-unwinding fault Solutiont125Radius calculation fault or product breaking •The product is broken or is is not correctly held by theby the tractor (sliding)•Check the product condition or the adjustment regardingthe band breaking 20.27thMotor thermal probeThe EDL ANA solution manages the motor thermal probe in standard version.If there is no probe connected, set 0.49 = L2 (1), then7.15 = Volt (6).If the probe is connected, the motor temperature is too high.• Terminal block configurationFunction Terminal Source/Dest.DigitalinversionAssignmentUNIDRIVE SPLine speed image 5 and 67.107.0918.20 T ension reference77.147.1318.21 Radius initialisation248.218.1119.32 Drive reset258.228.1210.33 Jogging run268.238.1319.42 Free278.248.14-Reverse Run/Stop288.258.1519.48 Free298.268.16-SM-EDL ANAT ension start10--19.33 Forward Run/Stop11--19.47 Band end signal12--19.38 Band end stop13--19.3924Notes25Notes 26Notes27MOTEURS LEROY-SOMER 16015 ANGOULÊME CEDEX - FRANCE 338 567 258 RCS ANGOULÊMES.A. au capital de 62 779 000 €。
远程I O适配器模块说明书

Local Fault Adapter Fault Adapter Active Power ON/OFF
AllenĆBradley ADAPTELROCAL PWRACTIVE FAULTFAULT
Reset Switch
Troubleshooting with the Indicator Lights
within the last 255 link transactions • communication is lost to a module when Rack Fault Select is
enabled When any of these conditions exist, the adapter will:
The module has indicators on the front plate as shown below. Use these indicators for troubleshooting the module. The following tables describes problems that may occur, probable causes, and recommended courses of action.
during communications by setting.
scanner
No replies sent to scanner
Press Reset button on front of adapter module (or cycle power) and resume proper communication.
ADAPTERLOCAL PWR ACTIVE FAULT FAULT
Local Fault Off Off
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CYCLING POWER SERVICEAbstract:This service exposes power- and force-related data and optionally speed- and cadence-related data from a Cycling Power sensor intended for sports and fitness applications.Revision HistoryContributorsDisclaimer and Copyright NoticeThe copyright in this specification is owned by the Promoter Members of Bluetooth® Special Interest Group (SIG), Inc. (“Bluetooth SIG”). Use of these specifications and any related intellectual property (collectively, the “Specification”), is governed by the Promoters Membership Agreement among the Promoter Members and Bluetooth SIG (the “Promoters Agreement”), certain membership agreements between Bluetooth SIG and its Adopter and Associate Members (the “Membership Agreements”) and the Bluetooth Specification Early Adopters Agreements (1.2 Early Adopters Agreements) among Early Adopter members of the unincorporated Bluetooth SIG and the Promoter Members (the “Early Adopters Agreement”). Certain rights and obligations of the Promoter Members under the Early Adopters Agreements have been assigned to Bluetooth SIG by the Promoter Members.Use of the Specification by anyone who is not a member of Bluetooth SIG or a party to an Early Adopters Agreement (each such person or party, a “Member”) is prohibited. The le gal rights and obligations of each Member are governed by their applicable Membership Agreement, Early Adopters Agreement or Promoters Agreement. No license, express or implied, by estoppel or otherwise, to any intellectual property rights are granted herein.Any use of the Specification not in compliance with the terms of the applicable Membership Agreement, Early Adopters Agreement or Promoters Agreement is prohibited and any such prohibited use may result in termination of the applicable Membership Agreement or Early Adopters Agreement and other liability permitted by the applicable agreement or by applicable law to Bluetooth SIG or any of its members for patent, copyright and/or trademark infringement.THE SPECIFICATION IS PROVIDED “AS IS” WITH NO WARRA NTIES WHATSOEVER, INCLUDING ANY WARRANTY OF MERCHANTABILITY, NONINFRINGEMENT, FITNESS FOR ANY PARTICULAR PURPOSE, SATISFACTORY QUALITY, OR REASONABLE SKILL OR CARE, OR ANY WARRANTY ARISING OUT OF ANY COURSE OF DEALING, USAGE, TRADE PRACTICE, PROPOSAL, SPECIFICATION OR SAMPLE.Each Member hereby acknowledges that products equipped with the Bluetooth technology ("Bluetooth products") may be subject to various regulatory controls under the laws and regulations of various governments worldwide. Such laws and regulatory controls may govern, among other things, the combination, operation, use, implementation and distribution of Bluetooth products. Examples of such laws and regulatory controls include, but are not limited to, airline regulatory controls, telecommunications regulations, technology transfer controls and health and safety regulations. Each Member is solely responsible for the compliance by their Bluetooth Products with any such laws and regulations and for obtaining any and all required authorizations, permits, or licenses for their Bluetooth products related to such regulations within the applicable jurisdictions. Each Member acknowledges that nothing in the Specification provides any information or assistance in connection with securing such compliance, authorizations or licenses. NOTHING IN THE SPECIFICATION CREATES ANY WARRANTIES, EITHER EXPRESS OR IMPLIED, REGARDING SUCH LAWS OR REGULATIONS.ALL LIABILITY, INCLUDING LIABILITY FOR INFRINGEMENT OF ANY INTELLECTUAL PROPERTY RIGHTS OR FOR NONCOMPLIANCE WITH LAWS, RELATING TO USE OF THE SPECIFICATION IS EXPRESSLY DISCLAIMED. BY USE OF THE SPECIFICATION, EACH MEMBER EXPRESSLY WAIVES ANY CLAIM AGAINST BLUETOOTH SIG AND ITS PROMOTER MEMBERS RELATED TO USE OF THE SPECIFICATION.Bluetooth SIG reserve the right to adopt any changes or alterations to the Specification as it deems necessary or appropriate.Copyright © 2013. Bluetooth® SIG, Inc. All copyrights in the Bluetooth Specifications themselves are owned by Ericsson AB, Lenovo (Singapore) Pte. Ltd., Intel Corporation, Microsoft Corporation, Motorola Mobility LLC, Nokia Corporation, and Toshiba Corporation.*Other third-party brands and names are the property of their respective owners.Document TerminologyThe Bluetooth SIG has adopted Section 13.1 of the IEEE Standards Style Manual, which dictates use of the words ``shall’’, ``should’’, ``may’’, and ``can’’ in the development of documentation, as follows:The word shall is used to indicate mandatory requirements strictly to be followed in order to conform to the standard and from which no deviation is permitted (shall equals is required to). The use of the word must is deprecated and shall not be used when stating mandatory requirements; must is used only to describe unavoidable situations.The use of the word will is deprecated and shall not be used when stating mandatory requirements; will is only used in statements of fact.The word should is used to indicate that among several possibilities one is recommended as particularly suitable, without mentioning or excluding others; or that a certain course of action is preferred but not necessarily required; or that (in the negative form) a certain course of action is deprecated but not prohibited (should equals is recommended that).The word may is used to indicate a course of action permissible within the limits of the standard (may equals is permitted).The word can is used for statements of possibility and capability, whether material, physical, or causal (can equals is able to).The term Reserved for Future Use (RFU) is used to indicate Bluetooth SIG assigned values that are reserved by the Bluetooth SIG and are not otherwise available for use by implementations.Table of Contents1Introduction (7)1.1Conformance (7)1.2Service Dependency (7)1.3Bluetooth Specification Release Compatibility (7)1.4GATT Sub-Procedure Requirements (7)1.5Transport Dependencies (7)1.6Error Codes (8)1.7Byte Transmission Order (8)2Service Declaration (9)3Service Characteristics (10)3.1Cycling Power Feature (10)3.1.1Characteristic Behavior (10)3.2Cycling Power Measurement (11)3.2.1Characteristic Behavior (11)3.2.1.1Flags Field (12)3.2.1.2Instantaneous Power Field (13)3.2.1.3Pedal Power Balance Field (13)3.2.1.4Accumulated Torque Field (13)3.2.1.5Wheel Revolution Data Field Pair (13)3.2.1.6Crank Revolutions Data Field Pair (14)3.2.1.7Extreme Force Magnitudes Field Pair (15)3.2.1.8Extreme Torque Magnitudes Field Pair (15)3.2.1.9Extreme Angles Field Pair (15)3.2.1.10Top Dead Spot Angle Field (15)3.2.1.11Bottom Dead Spot Angle Field (16)3.2.1.12Accumulated Energy Field (16)3.2.1.13Cycling Power Measurement Broadcast Feature (16)3.3Sensor Location (16)3.3.1Characteristic Behavior (17)3.4Cycling Power Control Point (17)3.4.1Cycling Power Control Point Procedure Requirements (17)3.4.2Cycling Power Control Point Behavioral Description (19)3.4.2.1Set Cumulative Value Procedure (19)3.4.2.2Update Sensor Location Procedure (20)3.4.2.3Request Supported Sensor Locations Procedure (20)3.4.2.4Set Crank Length Procedure (21)3.4.2.5Request Crank Length Procedure (21)3.4.2.6Set Chain Length Procedure (21)3.4.2.7Request Chain Length Procedure (22)3.4.2.8Set Chain Weight Procedure (22)3.4.2.9Request Chain Weight Procedure (22)3.4.2.10Set Span Length Procedure (23)3.4.2.11Request Span Length Procedure (23)3.4.2.12Start Offset Compensation Procedure (23)3.4.2.13Mask Cycling Power Measurement Characteristic Content (24)3.4.2.14Request Sampling Rate Procedure (25)3.4.2.15Request Factory Calibration Date Procedure (25)3.4.3General Error Handling procedures (25)3.4.4Procedure Timeout (26)3.5Cycling Power Vector (26)3.5.1Characteristic Behavior (27)3.5.1.1Flags Field (27)3.5.1.2Crank Revolution Data Field Pair (28)3.5.1.3First Crank Measurement Angle Field (29)3.5.1.4Instantaneous Force Magnitude Array Field (29)3.5.1.5Instantaneous Torque Magnitude Array Field (30)3.6Requirements for Time-Sensitive Data (31)3.7Requirements for Servers Used for a Distributed Power System (31)4SDP Interoperability (32)5Acronyms and Abbreviations (33)6References (34)1 IntroductionThe Cycling Power (CP) Service exposes power- and force-related data and optionally speed- and cadence-related data from a Cycling Power sensor (Server) intended for sports and fitness applications.1.1 ConformanceIf a device claims conformance to this service, all capabilities indicated as mandatory for this service shall be supported in the specified manner (process-mandatory). This also applies for all optional and conditional capabilities for which support is indicated. All mandatory capabilities, and optional and conditional capabilities for which support is indicated, are subject to verification as part of the Bluetooth qualification program.1.2 Service DependencyThis service is not dependent upon any other services.1.3 Bluetooth Specification Release CompatibilityThis specification is compatible with any of the following:∙Bluetooth Core Specification 4.0 with CSA2, CSA3 and CSA4 [1]∙ A Bluetooth Core Specification later than 4.0.1.4 GATT Sub-Procedure RequirementsRequirements in this section represent a minimum set of requirements for a Server. Other GATT sub-procedures may be used if supported by both Client and Server. Table 1.1 summarizes additional GATT sub-procedure requirements beyond those required by all GATT Servers.C.1: Mandatory if the Cycling Power Control Point characteristic is supported, otherwise excluded forthis service.1.5 Transport DependenciesWith the exception of the Cycling Power Measurement Broadcast feature (see Section 3.2.1.13) used in an advanced mode of operation, there are no transport restrictions imposed by this service specification. In that case, the LE method of broadcasting is used and broadcasting over BR/EDR is not supported.Where the term BR/EDR is used throughout this document, this also includes the use of AMP.1.6 Error CodesThis service defines the following Attribute Protocol Application Error code:1.7 Byte Transmission OrderAll characteristics used with this service shall be transmitted with the least significant octet first (i.e., little endian). The least significant octet is identified in the characteristic definitions in [2].2 Service DeclarationThe Cycling Power Service should be instantiated as a «Primary Service». The service UUID shall be set to «Cycling Power Service» defined in [2].3 Service CharacteristicsThe following characteristics are exposed in the Cycling Power Service. Only one instance of each characteristic is permitted within this service. The characteristic formats and UUIDs are defined in [2].Where a characteristic can be notified or indicated, a Client Characteristic Configuration descriptor shall be included in that characteristic as required by the Core Specification [1].Where a characteristic can be broadcasted, a Server Characteristic Configuration descriptor shall be included in that characteristic as required by the Core Specification [1].Notes:∙Security Permissions of “None” means that this service does not impose any requirements.∙Properties not listed as Mandatory or Optional are Excluded for this version of this service.3.1 Cycling Power FeatureThe Cycling Power Feature characteristic shall be used to describe the supported features of the Server.Reserved for Future Use (RFU) bits in the Cycling Power Feature characteristic value shall be set to 0.3.1.1 Characteristic BehaviorWhen read, the Cycling Power Feature characteristic returns a value that is used by a Client to determine the supported features of the Server.The bits of the Cycling Power Feature characteristic may either be static for the lifetime of the device (i.e., static permanently or until Service Changed is indicated) or guaranteed to be static only during a connection. Although all defined bits (i.e., bits 0 to 18) in this version of this specification are required to be static during the lifetime of a device, it is possible that some future bits will be defined as being static only during a connection.When the Server supports a feature, the associated bit of the Cycling Power Feature characteristic shall be set to 1 (Feature supported), otherwise, the associated bit shall be set to 0 (Feature not supported). The feature bits are defined in [2].3.2 Cycling Power MeasurementThe Cycling Power Measurement characteristic is used to send power-related data, speed-related data, and/or cadence-related data. Included in the characteristic value are a Flags field (for showing the presence of optional fields and measurement status), an Instantaneous Power field and depending upon the contents of the Flags field, may include one or more optional fields defined in [2].3.2.1 Characteristic BehaviorWhen the Cycling Power Measurement characteristic is configured for notification via the Client Characteristic Configuration descriptor and a power-related measurement is available, this characteristic shall be notified. The Server should notify this characteristic at a regular interval, typically once per second while in a connection and is not configurable by the Client.If the Cycling Power Measurement Broadcast feature is supported by the LE Server (see Section 3.2.1.13) and when the Cycling Power Measurement characteristic is configured for broadcast via the Server Characteristic Configuration descriptor and a power-related measurement is available, this characteristic shall be broadcasted (e.g., non-connectable undirected advertisement events) while in a connection (e.g. the Server stops broadcasting when disconnected). The Server should broadcast this characteristic at a regular interval. This should be typically broadcasted at the same interval as the notification of this characteristic.For an LE Server that supports the Cycling Power Measurement Broadcast feature, it shall support the sending of notifications and broadcasts while in a connection.If the Server supports the Cycling Power Measurement Characteristic Content Masking feature and if the Client does not need a particular field of the Cycling Power Measurement characteristic, the Server may allow the Client to turn off that particular field of the Cycling Power Measurement characteristic as described in Section 3.4.2.13. When a Client turns off some fields of the Cycling Power Measurement characteristic, this may affect the broadcast of the Cycling Power Measurement characteristic as described in Section 3.2.1.13 and is left to the implementation.Refer to Section 3.7 for additional recommendations for distributed power sensor systems (e.g., one CP Sensor on each pedal measuring the left and right power contribution).For LE, all the fields of this characteristic cannot be present simultaneously if using a default MTU size. For notification, if the characteristic size exceeds the current MTU size, the remaining optional fields shall be sent in the subsequent notification. Refer to Section 3.2.1.13 for additional requirements on the Cycling Power Measurement Broadcast feature.For BR/EDR, this restriction does not exist due to a larger MTU size.The Cycling Power Measurement characteristic contains time-sensitive data, thus the requirements for time-sensitive data and data storage defined in Section 3.6 apply.3.2.1.1 Flags FieldThe Flags field shall be included in the Cycling Power Measurement characteristic. Reserved for Future Use (RFU) bits in the Flags fields shall be set to 0.The bits of the Flags field, their function, and relationship to bits in the Cycling Power Feature characteristic are shown in Table 3.2.Note 1: If the corresponding feature bit of the Cycling Power Feature characteristic is set to 0, then this bit has no meaning and shall be set to 0.Each of the Flags bits in the table above may change during a connection if the corresponding support bit in the Cycling Power Feature characteristic is set to 1 indicating that the feature is supported. If the corresponding support bit is however set to 0, then the corresponding Flags bit shall also be set to 0 since the feature is not supported.3.2.1.2 Instantaneous Power FieldThe Instantaneous Power field shall be included in the Cycling Power Measurement characteristic.The Instantaneous Power field represents the value of the power measured by the Server. It represents either the total power the user is producing or a part of the total power depending on the type of sensor (e.g., single sensor or distributed power sensor system). Refer to Section 3.7 for additional requirements for distributed power sensor systems (e.g., one CP Sensor on each pedal measuring the left and right power contribution).3.2.1.3 Pedal Power Balance FieldThe Pedal Power Balance field may be included in the Cycling Power Measurement characteristic if the Server supports the Pedal Power Balance feature (see Table 3.2). The Pedal Power Balance field represents the ratio between the total amount of power measured by the sensor and a reference (either unknown or left). For example, if the sensor provides the power balance referenced to the left pedal, the power balance is calculated as [LeftPower/(LeftPower + RightPower)]*100 in units of percent.When supported, the Pedal Power Balance Reference bit of the Flags field (bit 1) describes whether the value is referenced from ’left’ or the reference is ‘unknown’.3.2.1.4 Accumulated Torque FieldThe Accumulated Torque field may be included in the Cycling Power Measurement characteristic if the device supports the Accumulated Torque feature (see Table 3.2). The Accumulated Torque field represents the cumulative value of the torque measured by the Sensor. When a connection is established, this value starts at 0 Newton meter and is may roll over.When supported, the Accumulated Torque Source bit of the Flags field (bit 3) describes whether the value is ’wheel based’ or ‘crank based’.The Accumulated Torque value may decrease.3.2.1.5 Wheel Revolution Data Field PairThe Wheel Revolution Data field pair (Cumulative Wheel Revolutions and Last Wheel Event Time fields) may be included in the Cycling Power Measurement characteristic if the device supports the Wheel Revolution Data feature (see Table 3.2). When present, these fields shall always be present as a pair.The Cumulative Wheel Revolution value is not permitted to roll over.The Cumulative Wheel Revolutions value, which represents the number of times a wheel rotates, is used in combination with the Last Wheel Event Time and the wheel circumference value available on the collector device to enable it to calculate 1) the speed of the bicycle, 2) the distance traveled and 3) and the power if combined with the Crank Revolution Data. In addition, if there is link loss, the Cumulative Wheel Revolutions value can be used to calculate the average speed of the bicycle during the link loss. This value is expected to be set to 0 (or another desired value in case of e.g., a sensor upgrade) at initial installation on a bicycle as described in Section 3.4.2.1. The Cumulative Wheel Revolutions value may decrement for some implementations (e.g., If the bicycle is rolled in reverse), but shall not decrease below 0.The ‘wheel event t ime’ is a free-running-count of 1/2048 second units and it represents the time when the wheel revolution was detected by the wheel rotation sensor. Since several wheel events can occur between transmissions, only the Last Wheel Event Time value is transmitted.See Section 3.4.2.1 for requirements related to setting the value of the Cumulative Wheel Revolutions field.The Last Wheel Event Time value rolls over every 32 seconds.3.2.1.6 Crank Revolutions Data Field PairThe Crank Revolution Data field pair (Cumulative Crank Revolutions and Last Crank Event Time fields) may be included in the Cycling Power Measurement characteristic if the device supports the Crank Revolution Data feature (see Table 3.2). When present, these fields shall always be present as a pair.The Cumulative Crank Revolutions value, which represents the number of times a crank rotates, is used in combination with the Last Crank Event Time to enable the Client to1) Determine if the cyclist is coasting and2) Calculate the instantaneous and average cadence3) Calculate the power if combined with the Wheel Revolution DataAverage cadence is not accurate unless 0 cadence events (i.e., coasting) are subtracted. In addition, if there is link loss, the Cumulative Crank Revolutions value can be used to calculate the average cadence during the link loss. This value is intended to roll over and is not configurable.The ‘crank event time’ is a free-running-count of 1/1024 second units and it represents the time when the crank revolution was detected by the crank rotation sensor. Since several crank events can occur between transmissions, only the Last Crank Event Time value is transmitted.The Last Crank Event Time value rolls over every 64 seconds.To enhance the user experience, the Server should ignore the extra crank revolutions that may be detected when the user is not pedaling (e.g., coasting down the hill) but the sensor is facing the crank revolution detection system (e.g., a magnet installed on the crankset) and may cause unwanted crank revolution detections.3.2.1.7 Extreme Force Magnitudes Field PairThe Extreme Force Magnitude field pair (Maximum Force Magnitude and Minimum Force Magnitude fields) may be included in the Cycling Power Measurement characteristic if the device supports the Extreme Magnitudes feature and the Sensor Measurement Context of the Cycling Power Feature characteristic is set to 0 (Force-based). Otherwise, this field pair is excluded from this characteristic (see Table 3.2). When present, these fields shall always be present as a pair.The Maximum Force Magnitude field represents the maximum force value measured in a single crank revolution; respectively the Minimum Force Magnitude field represents the minimum force value measured in a single crank revolution.Since a Server supports only one measurement context (e.g., Force-based or Torque-based), the support of these fields excludes the support of the Maximum Torque Magnitude and Minimum Torque Magnitude fields.3.2.1.8 Extreme Torque Magnitudes Field PairThe Extreme Torque Magnitudes field pair (Maximum Torque Magnitude and Minimum Torque Magnitude fields) may be included in the Cycling Power Measurement characteristic if the device supports the Extreme Magnitudes feature and the Sensor Measurement Context of the Cycling Power Feature characteristic is set to 1 (Torque-based). Otherwise, this field pair is excluded from this characteristic (see Table 3.2). When present, these fields shall always be present as a pair.The Maximum Torque Magnitude field represents the maximum torque value measured in a single crank revolution; respectively the Minimum Torque Magnitude field represents the minimum torque value measured in a single crank revolution.Since a Server supports only one measurement context (e.g., Force-based or Torque-based), the support of these fields excludes the support of the Maximum Force Magnitude and Minimum Force Magnitude fields.3.2.1.9 Extreme Angles Field PairThe Extreme Angles field pair (Maximum Angle and Minimum Angle fields) may be included in the Cycling Power Measurement characteristic if the device supports the Extreme Angles feature (see Table 3.2). When present, these fields shall always be present as a pair.The Maximum Angle field represents the angle of the crank when the maximum value is measured in a single crank revolution. Similarly the Minimum Angle field represents the angle of the crank when the minimum value is measured in the same crank revolution. The maximum and minimum values measured in a single crank revolution refer to either Maximum Force Magnitude and Minimum Force Magnitude field pairs or Maximum Torque Magnitude and Minimum Torque Magnitude field pairs.3.2.1.10 Top Dead Spot Angle FieldThe Top Dead Spot Angle field may be included in the Cycling Power Measurement characteristic if the device supports the Top and Bottom Dead Spot Angles feature (see Table 3.2).The Top Dead Spot Angle field represents the crank angle when the value of the Instantaneous Power value becomes positive.3.2.1.11 Bottom Dead Spot Angle FieldThe Bottom Dead Spot Angle field may be included in the Cycling Power Measurement characteristic if the device supports the Top and Bottom Dead Spot Angles feature (see Table 3.2).The Bottom Dead Spot Angle field represents the crank angle when the value of the Instantaneous Power value becomes negative.3.2.1.12 Accumulated Energy FieldThe Accumulated Energy field may be included in the Cycling Power Measurement characteristic if the device supports the Accumulated Energy feature (see Table 3.2). The Accumulated Energy field represents the accumulated value of the energy measured by the sensor. When a connection is established, this value starts at 0 kilo Joules and is not expected to roll over.3.2.1.13 Cycling Power Measurement Broadcast FeatureThe Cycling Power Measurement Broadcast feature is optional when using the LE transport and it is not applicable to BR/EDR.When the Cycling Power Measurement Broadcast is enabled by the Client (e.g., via the Server Characteristic Configuration descriptor), the Server shall send the Cycling Power Measurement characteristic value in a non-connectable undirected advertising event. The Advertising Data shall not exceed 31 octets and shall include the AD Structure Data described in Table 3.3:When the Cycling Power Measurement Broadcast is disabled by the Client (e.g., via the Server Characteristic Configuration descriptor), the Server shall stop advertising. The Server shall also stop advertising when disconnected from the Client.The Server may elect to send different fields of the Cycling Power Measurement characteristic when broadcasting (non-connectable undirected advertisement) as when notifying. Typically, the fields included in the broadcast are the mandatory fields (i.e., the Flags field and the Instantaneous Power field) and the Crank Revolution Data field(i.e., the Cumulative Crank Revolutions and the Last Crank Event Time field pair).3.3 Sensor LocationThe Sensor Location characteristic of the device may be used to describe the physical location of the Server when correctly fitted.If the Server supports the Multiple Sensor Locations feature, the value of the Sensor Location characteristic may be updated while in a connection as described in Section 3.4.2.2. Otherwise, if the Sensor Location characteristic is present and the Multiple Sensor Locations feature is not supported, the value of the Sensor Location shall be static for the lifetime of the Server or until Service Changed characteristic is indicated. If the Server supports the Multiple Sensor Locations feature, the Client should not assume that the value of the Sensor Location characteristic of the Server is set to the same value as at the end of a previous connection. This is primarily because the value may have been altered by a different Client after the previous connection (e.g., the user has moved his sensor to another location and configured the new Sensor Location with another Client).Refer to Section 3.7 for additional recommendations for distributed power sensor systems (e.g., one CP Sensor on each pedal measuring the left and right power contribution).3.3.1 Characteristic BehaviorThe Sensor Location characteristic returns the sensor location value when read.3.4 Cycling Power Control PointIf the Cycling Power Control Point is supported, profiles utilizing this service are required to ensure that the Client configures the Cycling Power Control Point characteristic for indications (i.e., via the Client Characteristic Configuration descriptor) at the first connection.Support for this characteristic is mandatory if the Server supports Wheel Revolution Data or Multiple Sensor Locations features, or if settings are configurable or if the Server allows a Client to do offset compensation or if the Server allows a Client to request some parameters; otherwise, it is excluded for this version of the service in accordance with Table 3.1.Refer to Section 3.7 for additional recommendations for distributed power sensor systems (e.g., one CP Sensor on each pedal measuring the left and right power contribution).3.4.1 Cycling Power Control Point Procedure RequirementsTable 3.4 shows the requirements for the Cycling Power Control Point characteristic in the context of this service.A Client shall use the Write Characteristic Value procedure to initiate a procedure defined in the Table 3.4.。