软管式自主空中加油受油机控制系统研究
某型飞机加装空中受油状态改进电传系统研究

某 型 飞 机 加装 空 中受油 状态 改进 电传 系统 研 究
曹永 刚,赵鲁 宁,李 察
( 中国人民解放军驻沈 阳飞机工业 ( 集团 ) 公司 军事代表室 ,辽宁 沈 阳 10 3 ) 10 4
摘
要 :为满足未来 战争需要 ,某 型飞机根据空 中加油对受 油飞机的要求 ,对 该型 飞机 电传 操纵系 统进行 了
,
.
t e FBW o to u ei e e ine o s tsy t e h c n r lr l s rd sg d t a if h
n e farr f e i . A i fp ltmo e i a fei a s ae nA FS A a t eN u e d o i eu l ng k nd o io d l n ir u l gs t ,b sdo N I( d pi e . r e n tu v
s e t e t e l e t e tc n l g s e p ce . p e i o r ai e h oo y i x e t d v z h
三年级科学解释飞机空中加油物理原理

三年级科学解释飞机空中加油物理原理空中加油分软管一锥管式(简称软式)及伸缩管式(简称硬式)两大类。
一、软式空中加油
输油系统靠作用在锥套上的气动力使软管放到全拖曳位置,稳定伞保持加油接头稳定并作为受油机对接时瞄准的靶子。
受油机的受油接头进入稳定伞内即可沿伞的骨架滑入加油接头并与之啮合及锁定。
来自加油机的压燃油经吊舱加油泵增压后经输油系统、加油接头、受油插头进入受油机。
调压系统对加油泵的工作状态进行适时控制,以保持加油接头入口压力在规定范围内(通常为0.34±0.03MPa)变化,既可获得最高的加油率,又使受油机处于安全压力状态工作。
加油完毕后受油机减速,当软管放至全拖曳位置,软管张力超过一定值时,加油接头与受油插头即脱开。
二、硬式空中加油
硬式加油系统的主体是安装在加油机尾部的伸缩套管,伸缩套管本身由内、外套管组成,它相当于液压作动筒,在液压作用下内管(相当于活塞杆)可沿外管滑动,构成可伸缩的燃油通路。
内管端部装有加油接嘴,外管上装有小翼,加油员操纵小翼可使伸缩套管在一定锥角范围内绕根部作俯仰或横向运动。
不加油时,伸缩套管缩至最短,并由加油机尾部的钢索提升到紧贴机身尾部。
加油时,放下伸缩套管,受油机进入对接范围后,加油员目视操纵小翼及伸缩内管,使加油接嘴插入受油机背部的受油插座并锁定。
加油过程中受油机可在一定范围内机动,随动系统使伸缩套管作相应运动,
保持受油机和加油机的啮合状态。
通过加油接嘴及受油插座上的互感线圈,可进行加油机和受油机之间的信号联络。
加油完毕后,加油员操纵缩回内管拔出加油接嘴,受油机脱离。
自主空中加油视觉导航系统中的锥套检测算法

Abs t r a c t : Dr o g u e d e t e c i t o n i s i mp o r t a n t f o r r e l a t i ve na v i g a t i o n s ys t e m or f p r o b e — - a n d ・ - d r o g u e a u t o n o mo us a e r i a l r e f u e l i n g. I t i s a c ha l l e n g i n g t a s k t o d e t e c t t h e d ro g u e wi h r t nd a o m m o t i o n d u e t o d i s t u r b a n c e s c a u s e d b y b o t h he t t a n k e r wa ke v o r t e x a n d a t mos p h e ic r t ur b u l e n c e .I n hi t s p a p e r ,t he p r o bl e m o f ro d g u e
s t a i t o n a r y wa v e l e t t r ns a f o r m r e s p e c t i v e l y . T h e n he t o b j e c t i n h t e l o w r f e q u e n c y s u b — b nd a i ma g e s e q u e n c e s o f c o a r s e s c a l e w a s u s e d a s o b j e c t c o n i f d e n c e ma p t o f e e d b a c k he t l o w s u b - b nd a i m a g e s e q u e n c e s o f
知道飞机在空中是怎么加油的吗

知道飞机在空中是怎么加油的吗飞机在空中加油是⼀个⾮常复杂的过程,下⾯跟⼤家详细说⼀下。
⼀般分为四个阶段会合空中加油两机会合有四种⽅式。
⼀是同航线会合,就是加油机和受油机在同⼀航线上的某处进⾏会合。
⼆是定时会合,要求加油机和受油机定出加油协调要求和特定会合时间,按时在制定空域会合。
三是对飞会合,就是两架飞机正⾯飞⾏,互相靠拢,然后受油机按加油机前进⽅向做180度转弯,把航向转到加油机⽅向,并在前⽅5公⾥处做好加油准备。
四是待机会合,就是由空中预警机与加油机,受油机进⾏通信联络,并像加油机发出航向和速度指令,同时引导受油机与加油机会合,直到受油机飞⾏员能⽤雷达或⽬视发现加油机为⽌,然后,受油机再进⼊受油位置。
⽆论采⽤何种会合⽅式,受油机均应⽐加油机低60⽶。
空中加油对接对接是空中加油的⼀个重要环节,必须严格按照技术要求和操作程序进⾏,受油机带弹时,应采取严格的安全措施,受油机带有射击武器时,尤其要注意安全,除加油和通话开关外,飞⾏员不得触碰其他电⼦开关。
加油⽬前为⽌,⽐较成熟并被⼴泛采⽤的空中加油设备主要有两种,⼀种是软管式加油设备,另⼀种是伸缩管式加油设备。
软管式加油空中加油时,加油机内的⼯作⼈员将软管放出机外,软管下的黄褐⾊信号灯闪亮。
受油机的驾驶员收到准备妥当的信号后,便整好⾃⼰飞机的位置将受油管伸⼊锥套,只要⾃锁机构锁紧之后,燃油便⾃动流向受油机。
由于受油机于加油机的速度差和⾼度差都有严格的规定,因此受油机驾驶员的动作必须⼗分稳定和准确。
如果⼀切正常,黄褐⾊信号灯⾃动熄灭,遇到紧急情况,红⾊警告灯闪亮,告诉受油机驾驶员进⾏调整。
加油结束后,受油机减速,当加油机和受油机的速度差达到⼀定值时,在⼀定的张⼒下,输油软管和受油管就会⾃动脱开,燃油⾃动关断,然后受油机和加油机的距离和⾼度差逐渐拉⼤,受油机到达安全距离后再向⼀侧推出,加油机则可继续给下⼀架飞机加油或者收回加油软管。
伸缩管式加油进⾏空中加油作业时,加油机上的操作员通过信号指挥受油机接近已伸出的伸缩管。
基于视觉的空中加油定位技术研究

基于视觉的空中加油定位技术研究
赵敏琨 刘小雄 徐新龙 杨!楠 王映龙
!西北工业大学 自动化学院&西安!+%##+""
摘要空中加油作为增加飞行器续航能力的一种有效手段&正受到越来越多的关注和研究&而具有低成本'无源性等优点的 视觉导航技术为自动空中加油的实现提供了可靠的解决方案$首先介绍了空中加油的基本概念&包括软'硬两种不同方式以及从 交会到脱离的过程$然后以加油锥套'受油接口'飞行器机体三种不同的研究主体为切入点&梳理了针对自动空中加油问题的视 觉定位解决方案&着重阐述了其中基于视觉的检测跟踪和位姿估计过程&总结了其中可用的视觉定位算法$最后讨论了当前该领 域待解决的问题&并展望未来的研究方向%
站或卫星信号等&但在某些场景下&这些信号可能不稳定
或无法获取%而视觉导航不需要参考信号&能够在复杂环
境下实现自主导航%
随着近年来光学传感器和计算机视觉算法的发展&视
觉导航技术逐渐成熟%针对 ((> 问 题&美 国团 队 首先 引 入 了视觉导航技术&其代 表 有 "##. 年 提 出 的 ]6R?MW系 统 ' (%) "##*年的 ]6R)>> 系统 & (") 以及"##&年起 GM\9M团 队 所 ($) 做的工作%近十多年来&国内外研究者就该问题提出了多 种解 决 方 案& 不 论 是 软 式 锥 套 定 位('+)& 还 是 硬 式 接 口 定 位 & (*-) 以 及 加 油 机 定 位 和 (%#%%) 受 油 机 定 位(%" % %')
基于STAMP的航空安全理论与实践第5章空中加油系统安全性分析与验证
第五章 空中加油系统安全性分析与验证
第五章 空中加油系统安全性分析与验证
3.生成系统级安全约束 系统级安全约束的主要目的是防止系统进入先前确定的 危险状态。这些约束以上述过程中定义的可接受条件为准, 对系统施加限制,并通过后续的功能控制结构进行合理控制。 安全约束与系统级危险的对应关系为:每个约束应该映射到 一个或多个危险,并且每个危险应该映射到至少一个约束。 结合上述分析,得到空中加油系统的安全约束如表 5.6所示。
第五章 空中加油系统安全性分析与验证
对于空中加油系统而言,其包含的控制反馈层级和系统 组件较多,可重点针对任务规划、任务飞行、燃油输送这三 类主要任务过程,系统地梳理实现相应功能的系统组件。以 燃油输送任务过程为例,受油机涉及的系统组件及主要职责 如表5.7所示。
第五章 空中加油系统安全性分析与验证
2.确定系统级危险 确定系统级损失之后,就可以进一步识别导致损失发生 的系统级危险。系统级危险是一个或一组系统状态,它与外 部环境共同作用诱发系统级损失。确定系统级危险的关键在 于合理把握空中加油系统的边界条件,保证危险发生在系统 内部,描述对象必须为系统本身而非系统内部组件。例如飞 机撞山事件,由于飞机才是需要控制的系统,因此系统级危险 应定义为飞机距离山体过近,而非山体距离飞机过近;另外,也 不能将其定义为防碰撞系统或飞行员的因素,因为这些是系 统级组件,而不是系统本身的状态。结合上述分析,归纳出四 种空中加油系统级危险,如表5.5所示。
第五章 空中加油系统安全性分析与验证
第五章 空中加油系统安全性分析与验证
会合是指加油机和受油机按照规定的时间到达规定空域 的过程,是完成空中加油的前提。主要的会合方式有定位会 合、航向会合、平行会合、定时会合顺序会合、途中会合 等。不论何种会合方式,两机都必须按照规定的安全要求有 序进行。
浙教版七年级科学下册第三章第1-2节测试卷(含答案)

七下科学-优化训练-第三章第1-2节测试卷一、选择题(每题2分,共40分)1、2012年11月23日,国产歼-15舰载机首次在航空母舰“辽宁号”上成功起降。
如图所示,飞机起飞时,若说该飞机上的飞行员是静止的,所选的参照物是()A.航母B.该飞行员驾驶的飞机C.海水D.航母上的工作人员2、如图所示,飞机空中加油时,受油机与加油机以同样速度向同一方向水平飞行,下列说法正确的是( )A.以加油机为参照物,受油机是运动的B.以受油机为参照物,加油机是静止的C.以地面为参照物,受油机是静止的D.以地面为参照物,加油机是静止的3、如图为作用在物体上的两个力的示意图。
那么,这两个力的大小关系为()A.F1=F2B.F1>F2C.F1<F2 D.无法确定4、下列描述物体运动快慢的成语中,与物理学描述运动快慢的方法相近的是()A.一日千里 B.大步流星C.风驰电掣 D.迅雷不及掩耳5、2011年5月15日,国际田联110m栏钻石联赛上海站敲响战鼓,冠军争夺在刘翔和奥利弗之间展开。
比赛临近结束,选手全力冲刺时,观众看到如图所示的场景,齐声欢呼“刘翔最快”;根据表中所示的比赛成绩,裁判裁定刘翔获胜,观众和裁判判断刘翔快过奥利弗的方法分别是()A.观众:相同时间比路程;裁判:相同时间比路程B.观众:相同时间比路程;裁判:相同路程比时间C.观众:相同路程比时间;裁判:相同时间比路程D.观众:相同路程比时间;裁判:相同路程比时间6、交通部门常用测速仪来检测车速。
测速原理是测速仪前后两次发出并接收到被测车反射回的超声波信号,再根据两次信号的时间差,测出车速,如图甲。
某次测速中,测速仪发出与接收超声波的情况如图乙所示,x表示超声波与测速仪之间的距离。
则该被测汽车速度是(假设超声波的速度为340米/秒,且保持不变)( )A .28.33米/秒B .13.60米/秒C .14.78米/秒D .14.17米/秒7、如图所示,是香香同学在相等时间间隔里运动的情景,可能做匀速运动的是( )8、某同学的爸爸携全家驾车去太湖渔人码头游玩,在途经太湖路时,路边蹿出一只小猫,他紧急刹车才没撞到它。
空中加油两种方式及其特点

城乡建设学院建筑学0901班刘玉瑶2009225070107空中加油两种方式及其特点空中加油机是专门用来给空中作战飞机进行加油的。
它主要装载燃油,通过加油机上的加油系统将燃油输给其他空中飞行的舰载飞机,以提高舰载飞机的航程。
空中加油系统由两部分组成:一部分装设在加油机上,另一部分装设在受油机上。
为了使受油机减轻重量,要求把空中加油的大部分设备安装在加油机上。
空中加油的两种方式:①飞杆式加油。
飞杆是一根可伸缩的半刚性杆,安装在飞机尾部。
飞杆的未端对称地安装两个短翼,操纵它,就可使飞杆在一定的角度范围内移动。
飞杆是由坐在加油机尾部座舱的一名飞杆操纵员操纵的。
空中加油时,操纵员将飞杆放到加油状态,通过信号指挥受油机接近伸出的飞杆。
当受油机接近加油机尾部5~10米距离时,两机保持位置不变,然后由飞杆操纵员操纵飞杆上的短翼,使飞杆移动,进入受油机的受油口。
操纵员锁上连接器后开始加油。
加油完后,操纵员开锁收回飞杆,两机脱开。
这种装置的特点是有专门的加油员,飞杆输油流量大,加油时间短,加800升燃油的时间约需4~7分钟。
②软管漏斗式加油。
这种加油设备由一个漏斗、一根长20~30米的软管和一个绞盘组成,漏斗是一个很轻的锥形容器,漏斗连在软管上,软管绕在绞盘上。
空中加油时,加油机内的人员把加油装置选定在工作状态,绞盘转动,软管从飞机里自行放出。
受油机的驾驶员看到加油机尾部的黄褐色灯亮,就知道一切都准备好了。
他操纵飞机把机上受油管伸进漏斗,漏斗内部的加油接头自动夹紧受油管,油就开始自动流进受油机。
加油完毕后,受油机驾驶员操纵飞机,降低飞行速度,在预定拉力下,受油管与漏斗断开。
以上两种加油方式,虽然载油较多,但飞行速度慢、飞得低。
但舰载飞机的速度快、飞得高,用上述方法给舰载机加油比较困难,于是又出现了一种新的加油方式,叫“伙伴加油”。
它是两架性能基本相同的飞机,一架作加油机,机上带油和一套软管漏斗装置,另一架带武器。
自动空中加油技术研究进展与关键问题

是针对 为 U V提供可靠 的空 中加 油能力 而言 。现实 中 , U V越 来越 高 的性 能要 求及 任 务 完成 能力 的需 A 对 A
求 和其 自身载重小及 油量少 的特点逐渐 成为一对难 以兼顾 的矛盾 , 为解决这种 矛盾 , 数航 空发达 国家开始 少
研究 自动空中加油相 关技术 , 并取得 了一些成果 。
中图分类号 :V 2 . 7 28 1 文 献标 识码 : A 文章编 号 :0 9— 5 6 2 0 )6— 0 1 O 10 3 1 ( 0 8 0 0 0 一 5
空 中加油是指在 飞行过 程 中一架 飞机 向另一 架或 多架 飞机 ( 或直 升机 ) 输燃 油 的活 动 。空 中加 油 自 传
近几年 正成为 国外航 空领域 新兴 的研 究 内容之 一。在分析 自动 空 中加油特 点的基 础上 , 对现 有 的两种 空 中加 油方 式作 了比较。根 据 国外有 关 自动 空 中加 油研 究 的最 新进 展 , 从传 感器 选择 、 加油状 态下 的控制器 设计 、 仿真 与测试 3方面 详 细论述 了其 基本 原理 与技 术 问题 , 出 了在 研 指
出现起 , 以其在军 事行动 中的重要作 用而 日益 受到各 国的广泛重视 。随着各 种无人 驾驶 飞行 器 ( A s 的 就 U V) 广泛应 用 , 近几年 出现 了 自动 空 中加 油 ¨ 2( uo t ei eul g A R 的概 念 。 自动 空 中加 油 主要 -] A t e A r l fe n , A ) ma d aR i
对接 成功 , 这无 疑是件对 U V要求很 高的工作 。因此两种 加油方式 不 同的特点与难 度决定 了各 自在实 现 自 A
动化 时需解决不 同的 问题 , 也造成 了这样一种 现状 , 即有关 自动 空 中加油 的概念 实现及 工程应 用研究 主20 O 2
基于QFT理论的自主空中加油无人机控制器设计

d i e n t s t h a t c a n b e d i r e c t l y u s e d i n u n ma n n e d a e i r a l v e h i c l e m o t i o n e q u t a i o n s . N e x t , t h e q u a n t i t a t i v e f e e d b a c k t h e o r y Q V r i s
袁 博 , 杨 军
( 西北工业大学 航 天学院,西安 7 1 0 0 7 2 )
摘
要: 研 究 了无人 机在 执行 空 中加 油任 务 时受到加 油机 尾 流 影响 下 的控制 器 设计 问题 。针对 此
问题 ,首先对 加油机 尾流 和无人 机俯 仰通 道进行 建模 ,将 非均 匀分 布 的尾 流速 度 转化 成在 无人 机 运 动方程 中能直 接使 用 的有 效 风 向量 和 风 梯度 。其 次 ,将 Q V T应 用 于 无人 机 俯 仰 通道 控 制 器 设 计 。在进 行控 制器设 计 时 , 将 尾流 引起 的风 向量和 风梯 度 引入 至无 人机 运 动 方程 的相应 参 数 ,且 假定 风 向量和风 梯度 的变化 范 围是有 界 的 , 这样 可 以减 少 尾 流 计算 的工作 量 ,便 于 工程 应 用 。仿 真 结果表 明,所设 计 的控制 器 对 空 中加 油 过程 中无人 机 飞 行 参 数 的 变化 具 有 强鲁棒 性 ,证 明 了
Abs t r a c t:Th e c o n t r o l l e r o f t h e pi t c h c h a n ne l f o r t h e a u t o n o mo us a e r i a l r e f u e l i n g u n ma nn e d a e r i a l v e hi c l e wi t h v o r t e x di s —
空中加油技术,使飞机飞得更远
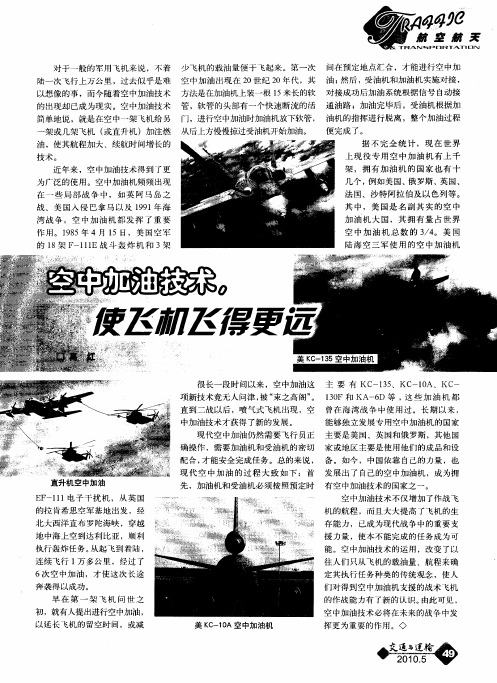
简 单地 说 ,就是 在 空 中一 架飞 机 给 另 门 ,进行 空 中加 油时加 油机放 下软 管 , 油 机的 指挥 进 行 脱离 ,整个加 油 过程
一
架或 几架 飞 机 ( 或直 升 机 )加注 燃 从后 上方慢慢 掠过 受油机开 始加油 。
便 完成 了 。
据 不 完 全 统 计 ,现 在 世 界
在 一 些 局 部 战 争 中 ,如 英 阿 马 岛 之 战 、 美 国 入 侵 巴拿 马 以 及 19 年 海ቤተ መጻሕፍቲ ባይዱ 91 湾 战 争 , 空 中加 油 机 都 发 挥 了 重 要 作 用 。 18 95年 4月 1 5日,美 国空 军
的 1 8架 F lE战 斗 轰 炸 机 和 3架 —l l
项 新技 术 竞无 人 问津 , “ 被 束之 高 阁” 10 。 3 F和 KA-6 D等 , 些 加 油 机 都 这 直 到 二战 以后 ,喷 气式 飞机 出现 ,空 曾在 海 湾 战 争 中使 用 过 。长 期 以来 , 中加油 技 术才 获得 了新 的 发展 。
能够 独 立发 展 专用 空 中加 油机 的 国家
现 代 空 中加 油 的过 程 大 致 如 下 :首 发展 出 了 自己 的空 中加 油机 ,成为 拥
直升机空 中加油 E -1 l电 子干 扰 机 ,从 英 国 F l
的 拉肯 希思 空 军基 地 出发 ,经
先 ,加 油机 和 受油 机 必须 按 照预 定时 有 空 中加 油技 术的 国家 之一 。
对 于一 般 的军 用飞 机 来说 ,不着 少 飞 机的 载 油量 便于 飞 起 来 。第一 次 间在预 定 地点 汇 合 ,才能 进 行空 中加 然后 ,受 油机 和加 油机 实 施对 接 , 陆 一次 飞行 上 万公 里 ,过 去似 乎是 难 空 中加 油 出现 在 2 0世 纪 2 0年 代 ,其 油 ; 5米长 的软 对 接成 功 后加 油 系统 根据 信 号 自动接 以 想像 的事 ,而今 随着 空 中加 油技 术 方法 是在加 油机 上装一 根 1 的 出现 却 已成 为现 实 。空 中加 油技 术 管 ,软 管 的头 部 有一 个快 速 断 流的 活 通 油路 ;加 油 完 毕后 ,受 油 机根 据加
飞机在空中如何加油-

飞机在空中如何加油?空中加油作为飞机发展的一种技术,首先是为了增大飞机的航程或延长续航时间及执行远程作战任务而研制的,在掌握这种技术后,其作用更加广泛,可以归纳为四个方面:一是加大了飞机航程和作战半径;二是增加载弹量,提高运输能力;三是延长留空时间;四是对燃油减少到不足以返航的飞机实施空中救援。
而飞机在空中是如何进行加油的呢?其过程一般包括会合、对接、加油和解散四个程序。
空中加油要求会合空域的天气少云,能见度一般应大10km,由于加油时飞机需要保持平稳飞行,要求加油作业区不能有明显的垂直气流。
下面以俄制YⅡA3-1空中加油吊舱的软管式加油系统为例说明加油过程。
会合空中加油的两机会合可以有四种方式:同航线会合、定时定点会合、对飞会合和空中待机会合。
无论哪种会合方式,受油机均应比加油机飞行高度低600m。
加油机和受油要在指定的空域会合后即开始进行加油前的编队飞行,编队队形可采用50m×50m。
空中加油吊舱尾部软管锥套收藏处有一个红、黄、绿信号灯面板,加油机的加油控制板(设在加油员舱或驾驶舱)上有各种加油控制指标和指示信号灯及开关。
首先,加油机放出软管,使加油软管处于全拖曳位置。
在两机编队飞行时,吊舱呈巡舱状态,红灯亮。
加油过程开始时,将控制板上“回绕、拖曳”指令开关从“回绕”位置扳到“拖曳”位置,冲压空气涡轮同时由顺桨状态进入约3000r/min的低转速状态,软管卷盘机构先回绕一点,刹车止动块从刹车刺轮中退出而松刹车,锥管在弹力作用下从吊舱内弹出,锥管弹出后由于气流作用,软管在稳定伞阻力作用下向后拖出,此时吊舱内软管卷盘收放控制机构工作,软管卷盘拖曳过程中产生的功率通过软管卷盘、链轮链条、变速箱、泵/马达(此时处于泵工况)所吸收,控制软管放出速度为 1.2~3m/s,到软管放出全拖曳位置前的 1.5m时(此时红灯灭、黄灯亮),再将放出速度减慢,直到全拖曳位置时制动。
对接加油机和受油机在指定的空域会合后即开始进行加油前的编队飞行并准备对接。
软式空中加油系统鞭甩现象多体动力学分析

第 37 卷第 4 期2024 年4 月振 动 工 程 学 报Journal of Vibration EngineeringVol. 37 No. 4Apr. 2024软式空中加油系统鞭甩现象多体动力学分析赵振军1,谭兴宇1,史晓军2,张昌荣2,郭鹏2(1.北方工业大学机械与材料工程学院,北京 100144;2.中国空气动力研究与发展中心高速空气动力研究所,四川绵阳 621000)摘要: 软管‑锥套式空中加油系统的柔性结构经常发生不同程度的软管鞭甩现象,极大影响空中加油任务的安全性。
基于柔性多体动力学,建立了空中加油系统动力学模型,其中,利用基于任意拉格朗日‑欧拉描述方式和绝对结点坐标法的索/梁模型描述管线的大变形、大范围运动以及软管收放,并对空中加油系统受到的气动力进行建模,建立的模型能够反映加油机和受油机运动、软管和锥套的变形与气动力的耦合影响。
基于建立的空中加油系统动力学模型,复现飞行状态下的软管鞭甩现象,获得了鞭甩现象的形成机理。
研究表明,对接冲击下,软管平衡状态改变所形成的剪切波向后传播与反射是鞭甩现象产生的主要原因。
通过多工况计算结果,分析了软管刚度、对接速度、Ma数各因素对鞭甩现象引起的软管剪切力、纵波与剪切波传播速度的影响规律,并分别分析了软管收放控制和加缓冲的受油插头两种措施对鞭甩现象振动抑制的有效性。
关键词: 多体动力学;空中加油;鞭甩现象;软管‑锥套组合体中图分类号: O313.7; V228.1+7 文献标志码: A 文章编号: 1004-4523(2024)04-0696-12DOI:10.16385/ki.issn.1004-4523.2024.04.016引言空中加油是飞行器在不着陆情况下,实现燃油快速补给、提升战机滞空时间、及时投入战场作战的主要技术手段。
根据加油管路方案的不同,空中加油可以分为软管式加油和硬管式加油两种方式[1],中国主要采用软管式加油方式。
软管是一根长达数十米的柔性体,在对接过程中受到多种内外部干扰因素影响,比如加油对接操纵方式、软管柔性材料、飞行Ma数、加油机尾流、姿态变化、受油机头波等[2]。
软式空中加油半实物仿真系统研究
2021年6月图 学 学 报June 2021第42卷 第3期JOURNAL OF GRAPHICSV ol.42No.3收稿日期:2021-03-13;定稿日期:2021-04-21Received :13 March ,2021;Finalized :21 April ,2021第一作者:周仁先(1982 ),男,山东青岛人,高级工程师,硕士。
主要研究方向为飞行仿真、模拟器研制。
E-mail :**************First author :ZHOU Ren-xian (1982–), male, senior engineer, master. His main research interests cover flight simulation and simulator development.E-mail :**************软式空中加油半实物仿真系统研究周仁先1, 杨尚君2, 林以军2(1. 沈阳飞机设计研究所,辽宁 沈阳 110035;2. 空军航空大学,吉林 长春 130022)摘要:为模拟软式空中加油相对运动过程,研究加油机和受油机在近距离时的气动影响和飞行接近策略,提出了一种考虑尾涡流、头波效应影响的软管-加油伞运动模型,仿真实验表明该模型能够准确模拟软式空中加油相对运动过程,在某型飞机大型球幕飞行训练模拟器的基础上,开发了一套基于该运动模型的软式空中加油半实物仿真模拟训练系统,对加油伞组件控制方法进行了详细设计,并利用OpenGL 语言开发了一套空中加油可视化模拟训练插件。
关键词:软式空中加油;半实物仿真;运动模型;尾涡效应;头波效应中图分类号:TP 391.9 DOI :10.11996/JG .j.2095-302X.2021030478 文献标识码:A文 章 编 号:2095-302X(2021)03-0478-07Design and research of the hose-drogue aerial refuelinghardware-in-the-loop simulation systemZHOU Ren-xian 1, YANG Shang-jun 2, LIN Yi-jun 2(1. Shenyang Aircraft Design and Research Institute, Shenyang Liaoning 110035, China;2. Aviation University of Air Force, Changchun Jilin 130022, China)Abstract: In order to simulate the relative motion process of hose-drogue aerial refueling, explorations were made on the aerodynamic influence and flight approach strategy of the tanker and the receiver at close range. This paper proposed a motion model of hose refueling parachute, considering the tail wake vortex effect and the head wave effect. The simulation results show that the proposed model can accurately simulate the relative motion process of soft aerial refueling. Based on the large-scale ball screen flight training simulator of a certain type of aircraft, a soft hardware-in-the-loop simulation training system for aerial refueling was developed, the control method of the parachute component was designed in detail, and a set of visual simulation training plug-in for air refueling was developed using OpenGL language.Keywords: hose-drogue aerial refueling; hardware-in-the-loop simulation; motion model; tail wake vortex effect; head wave effect空中加油技术是现代空中侦查、作战、运输的一项关键技术,能够极大地提升飞机的持续作战能力及作战半径[1],作战飞机可以根据任务特点减少载油量,增加对物资或者弹药的装载量,从而有效提升飞机总体作战性能。
机场加油PLC控制系统设计

机场加油PLC控制系统设计
李继波
【期刊名称】《《可编程控制器与工厂自动化(PLC FA)》》
【年(卷),期】2006(000)001
【摘要】本文从用户的需求出发,设计了一种实用的飞机加油车加油恒压控制系统。
通过PLC来监测主油管道的压力变化来模拟人工调节压力的方法,有效减少了控制反应的迟滞,实践表明该系统具有很好的恒压效果。
同时也实现了无人值守的开关
机功能。
【总页数】2页(P58-59)
【作者】李继波
【作者单位】华南理工大学软件工程学院
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于仿真的机场管道加油系统同时加油井优化设计 [J], 陆朝荣;刘长春;于佰俭
2.某机场飞机加油车自动调度系统设计方案 [J], 司凯平;
3.基于局域网的民用机场自动加油系统构想——收油及化验系统设计初步 [J], 周
泳海;孟晓;刘长城
4.机场管道加油栓及油罐车加油站多泵自动控制系统 [J], 龚丰
5.不提供正常加油服务高高原复杂机场的运行控制——以空客A319-115机型昌
都/邦达机场起降为例 [J], 张序
因版权原因,仅展示原文概要,查看原文内容请购买。
空中加油软管一锥套动态建模与仿真
关 键 词 :空 中加 油 ;软 管 一 套 ;动 态 建模 锥
中图分类号 : P0 T 32 文献标识码 : A 文 章 编 号 :1 7 — 2 6 2 1 )7 0 3 — 3 6 4 6 3 (0 2 1— 15 0
ቤተ መጻሕፍቲ ባይዱ
Dy a i o ln nd sm ul to o e i lr f ln s - r g n m c m dei g a i a i n fa r a e uei g ho e d o ue
W ANG e ,L U Xi a g,W ANG e g,L U Xi o q W i I - n c Pn I a —i
加 油 机 的 飞 行状 态 ,加 油 软 管 牵 引 点 的位 置 以及 软 管一 套 锥
切 向摩 擦 力 系 数 C 由 当地 气 流 雷 诺 数 ( e V /) , R = Lv 决定 。
是 相 对 气 流速 度 的 幅值 , 里 V 由 飞机 的地 速 以 及 机 翼 的诱 这 导 速 度 合 成 , 中采 用 H l c— un a 模 型I 模 拟 飞 机 尾 文 a ok B rh m l 6 ] 来
是 软 管 与相 对 气 流 间 的夹 角 。 一旦 确 定 了 , 切 向 摩 擦 则 力可 以计 算 出 来 :
= t2 T・ T・ 叮 Z r ( 0) 1
这 里 0和 一 组 方 位 角 和 g是 、 的非 线 性 函数 。 是
质 点 的 位 置 和 速度 向量 被 用 来 计 算 各段 软管 的受 到 的 气
特性。
平 面 上 的投 影 与 机 体 的 夹角 。 机体 坐 标 系 绕 轴 将 向下 旋 转 。 后 绕 轴 向 外 旋 转 , 到 的就 是 , 的 , 然 得 沿 K点 指 向 . 。各 种 坐 标 系 间 的关 系 如 图 1 示 。 , 点 所
一种软式空中加油可变阻尼稳定伞[发明专利]
![一种软式空中加油可变阻尼稳定伞[发明专利]](https://img.taocdn.com/s3/m/61123711bdd126fff705cc1755270722192e5980.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 202011169255.2(22)申请日 2020.10.28(71)申请人 南京航空航天大学地址 210016 江苏省南京市秦淮区御道街29号(72)发明人 徐阳 刘学强 (74)专利代理机构 江苏圣典律师事务所 32237代理人 韩天宇(51)Int.Cl.B64D 39/04(2006.01)B64D 17/80(2006.01)(54)发明名称一种软式空中加油可变阻尼稳定伞(57)摘要本发明公开了一种软式空中加油可变阻尼稳定伞,包括锥套、伞衣、n个支架、以及n个片状弹簧;n个支架沿锥套轴线周向均匀设置在锥套的一端,其根部和锥套固连、端部朝外散开;片状弹簧的根部和其对应支架的端部固连,使得片状弹簧的端部朝内指向锥套轴线,在受到气动载荷时发生形变;伞衣呈环状、采用弹性模量大于预设弹性模量阈值的材料制成,和n个片状弹簧一一固连,通过片状弹簧的形变进行变形、进而改变迎风面积。
本发明能够实现阻力的自适应控制,锥套的拖拽位置变化远小于传统加油稳定伞,能够有效拓宽传统加油稳定伞覆盖的速度域和高度域,对软式空中加油技术有着显著的改善。
权利要求书1页 说明书4页 附图3页CN 112373706 A 2021.02.19C N 112373706A1.一种用于软式空中加油的可变阻尼稳定伞,其特征在于,包括锥套、伞衣、n个支架、以及n个片状弹簧,n为大于等于3的自然数;所述n个支架、n个片状弹簧一一对应,其中,所述n个支架沿锥套轴线周向均匀设置在锥套的一端,其根部和锥套固连、端部朝外散开;所述片状弹簧为采用金属或复合材料制成的弧形薄片,在受到气动载荷时发生形变,片状弹簧的根部和其对应支架的端部固连,使得片状弹簧的端部朝内指向锥套轴线;所述锥套的另一端和加油软管相连;所述伞衣呈环状、采用弹性模量大于预设弹性模量阈值的材料制成,和所述n个片状弹簧一一固连,通过片状弹簧的形变进行变形、进而改变迎风面积。
大型飞机空中受油飞行性能影响分析

加油机的尾部流场主要由加油机的机翼扰动流场、加油吊
舱的扰动流场、发动机喷流以及下洗流场等构成[2]。气流流过机
翼,由于机翼上下表面存在压差,下表面的气流绕过翼尖会流向
上表面,这种流动与自由来流一起,形成螺旋线性的流动,在机
翼下游不远处,形成较强的翼尖涡[3],其涡心大约在 0.8 倍翼展
位置;加油吊舱会产生一个强度较小的吊舱涡;发动机喷流在尾
喷管后形成一个干扰流场;而前方来流流经加油机后会产生下
洗流场。某大型飞机采用机身、软式受油方式受油时,由于加油
吊舱位于机身对称面,加油区干扰流场对受油机的横航向特性
影响左右可相互抵消,在性能分析时可忽略不计,主要考虑纵向
影响。通过 CFD 仿真计算发现,加油机翼展较大,其翼尖涡涡心
[1] 张凯峰,雷鹍.面向微细制造的微成形技术[J].中国机械工程,
4 结论
2004,12(15):1121-1127.
本课题“箔板电磁微成形变形尺寸效应研究”已基本完成, [2] Engel U,Eckstein R.Microforming from Basic Research to Its
取得了较为满意的结果。不仅对于不同参数条件对尺寸的变形 Realization.Journal of Materials Processing Technology,2002,125-
情况产生的影响有了基本准确的认识,在实验参数测量误差方 126(9):35-44.
面也达到了要求。
[3]郭祎.电磁微成形工艺研究[M].北京:华北电力大学(北京),
经实验证明,微通道胀形高度在一定范围内与放电次数近 2009.
似成正比,但超出一定范围后,频繁放电的材料因多次塑性变 [4]赵庆娟,王春举,江洪伟,于海平,郭斌援模具结构对箔板电磁微
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 受油机动力学模 型的建立
空 中加 油 分 为 会 合 、对 接 、加 油 和 分 离 四 个 阶 段 。软管 式空 中加 油 过 程 中 ,受 油 机按 照 指 令 程
科 学 技 术 与 工 程
11卷
序与加 油 机 在 指 定 空域 会 合 ,加 油 机 放 下 加 油 锥 Y=[ ,l,,z] ,为 受油 机插 头 在 地 面 惯性 坐 标 系 下
受 油 机接 近并 动态 跟 踪 加 油机 ,实现 与加 油 锥 套 的 的 自主空 中加 油 研 究 起 步较 晚 ,发 展 空 间 较 大 ,而
精 确对 接 。 目前 可 以 采 用 不 同 的 控 制 理 论 和 方 法 且 软管 式 自主空 中加 油 控制 系统 干 扰 较 多 ,增 加 了
第 11卷 第 8期 2011年 3月 1671— 1815(2011)8—1755—07
航 空 航 天
科 学 技 术 与 工 程
Science Technology and Engineering
VoL 11 No.8 Mar.2011
⑥ 201 1 Sci.Tech.Engng.
当前 迫切 需要 解决 的关 键课 题 之一 。 本文 针对 软管 式 自主空 中加 油 过程 ,为实 现 受
油插 头对 加油 锥套 的动 态 跟 踪 与对 接 ,假 定 受 油 机 与加油 机之 间的相对 位 置通 过 DGPS或者 视觉 传 感 测 量 获得 ,采用 参考 轨 迹 观 测 器 实 时估 算 出受 油 机 期 望跟 踪 的状态 量 与 控 制量 ,并 通 过全 状 态 反 馈控 制 ,实现 对受 油机 的飞行控 制 。
文献标志码 A
空 中加油 (Air—Air Refueling,AAR)技 术是 在 空 2007年 完成 了 自主空 中加 油 的验 证 工 作 J。我 国
中一 架航 空 器 给ቤተ መጻሕፍቲ ባይዱ另 一 架 或 数 架 航 空 器 (或 直 升 机 ) 在 1992年 完成 了首 次 空 中加 油对 接 ,并 于 2005年
考观测器 的全状态反馈 控制方法设计 了受油机 的飞行控制 系统。首先根据 DGPS或 者视 觉传 感器测量 的加油机 与受 油机 的
相对位置 ,设 计 了参考 轨迹生成模块 ,实时生成受油机期望 的平滑飞行轨迹 。然 后通过 一个输 出跟踪 观测器在 线估算 出前馈
控 制 信 号 和 参 考 状 态 量 。基 于 估 算 的状 态 量 设 计 一 个 全 状 态 反 馈 控 制 器 。 最 终 实 现 对 参 考 状 态 的 精 确 跟 踪 ,保 证 受 油 插 头
软 管 式 自主 空 中 加 油 受 油 机 控 制 系统 研 究
刘 翌 袁 锁 中 周 春 华
(南 京 航 空航 天 大 学 自动化 学 院 ,南 京 210016)
摘 要 针对软管 式空 中加 油过程 中加油锥套 受气流扰 动影响,受油机受油插 头难 以与之 实现精确 对接的 问题 ,提 出基 于参
套 ,受 油机 飞行 员 控 制 飞机 ,实 现 受 油 插 头 与 加 油 的空 问位 置 变 化 量 。空 中加 油 的 过 程 要 求 实 现 受
锥 套 的对 接 ,装 在加 油 机 吊舱 内的燃 油 泵 将加 油 箱 油机 受油插 头 与加 油 机 加 油锥 套 实 现对 接 ,也 即受 内的燃油 经 输 油管 输 往 受 油机 油 箱 ¨ 。加 油 时 受 油插 头与加 油锥套 在地 面坐标 下 的相 对位 置为零 。
2010年 12月 21 13收 到 国 家 自然科 学 基金 (60674100)、南 京 航 空 航 天 大 学基 本 科 研 业 务 费专 项 科 研 项 目基 金 (V1083-031)资 助
第 一 作者 简介 :刘 墅 (1987一 ),女 ,江 苏 盱 眙 人 ,汉 族 ,硕 士 生 。 研 究方向 :飞行控制与仿真 。
与加油锥套的精确对接和位置保持 。仿真 结果 表明 ,在 四种 强度 阵风 干扰 下,控 制器 能 实现精确 的双机 空 中加 油设备跟踪对
接 ,具 有 良好 的 动 态 性 能 与 鲁棒 性 能 。
关 键 词 软 管 式 加 油 参 考 观 测 器 全 状 态 反 馈 飞 行 控 制
中 图法分类号 V249.4;
鲁 棒控 制和定 量 反馈 理 论 J,比例 导 引 和 视线 法 [ 等 ,这些 方法 能 够 实 现 自动 空 中 加 油 ,但 由于 控 制 方法 的先 进性 和复 杂 程 度 ,在 工 程 实 现 和 作 战应 用 上 ,存 在较 大 的难度 。
美 国军 方 于 2004年 开始 开 展 无 人 机 自主 空 中 加 油 系统 的研制 工作 ,分别 采 用 GPS,机 器视觉 识 别 等 方法 测量 受油机 与 加 油锥 套 之 间 相 对 的距 离 ,于
加注 燃油 ,使其 航 程 加 大 ,续 航 时 间增 长 ,有 效 载荷 首次 成功 实施 多 吨 量 的空 中 加 油 。 自主 空 中加 油
增加 的技 术 _】.2 J。空 中加 油 自出 现 起 ,就 以其 在 军 的理 论研 究也 处 于有 步 骤 地 发展 阶段 ,例如 基 于 输
事行 动 中的重 要作 用 而 日益 受 到各 国 的广 泛 重 视 , 入 一输 出非 线 性反 馈 线 性 化 方 法 研 究 了硬 式 空 中加 分为 软 、硬 式两 种 加 油 方 式 。软 管式 空 中加 油 要 求 油 的控 制 系统 ¨。。。相 比美 国等 其他 发 达 国家 ,我 国
控 制受 油机 跟踪 和 动态 对 接 加 油机 的过 程 ,如 LQR 对 接难 度且 降低 了安 全 性 。 因此 ,开 展 软 管式 自主
和 的方 法 _3'4 J,神 经 网络 和 自适 应 控 制 方 法 _5], 空 中加 油研 究 ,提 高 空 中加 油 的成 功 率 和 安全 性 是