仿真课件第三章
第3章Proteus的虚拟仿真工具ppt课件全
第3章 Proteus的虚拟仿真工具ppt 课件(全)
❖ 单频率调频波发生器的属性设置对话框,如图3-15 所示。
❖ 其中,主要参数说明如下: ❖ Offset:电压偏置值。 ❖ Amplitude:电压幅值。 ❖ Carrier Freq:载波频率fC。 ❖ Modulation Index:调制指数MDI。 ❖ Signal Freq:信号频率fS。 ❖ 经调制后,输出信号为
❖ 1. 放置单频率调频波发生器 ❖ (1) 在Proteus ISIS环境中单击工具箱中的
“Generator Mode”按钮图标,出现如图3-1所示的 所有激励源名称列表。
❖ (2) 用鼠标左键单击“SFFM”,则在预览窗口出现 单频率调频波发生器的符号。
❖ (3) 在编辑窗口双击,则单频率调频波发生器被放置 到原理图编辑界面中,可使用镜像、翻转工具对其 位置和方向进行调整。
❖ (5) 示波器显示的图形如图3-6所示。
SINE SOURCE 1
A
B
SINE SOURCE 2
C
D
图3-5 正弦波信号发生器与示波器的连接
图3-6 示波器显第示3章的正Pro弦teu波s的信虚号拟波仿真形工具ppt
课件(全)
3.1.3 脉冲发生器
❖ 脉冲发生器能产生各种周期的输入信号,如方波、 锯齿波、三角波及单周期短脉冲。
❖ 下面我们结合电路分析实例,对Proteus VSM 下的虚拟仿真仪器和工具逐一介绍。
第3章 Proteus的虚拟仿真工具ppt 课件(全)
3.1 激 励 源
❖ 激励源为电路提供输入信号。Proteus ISIS 为 用户提供了如表3-1所示的各种类型的激励源,允许 对其参数进行设置。
第三章fluent仿真有限速率燃烧模型ppt课件

3、有限速率/涡耗散模型
• 简单结合了Arrhenius公式和涡耗散方程。 • 避免预混燃烧中,ED模型出现的提前燃烧问题。
有限速率/涡耗散模型
• 同时计算Arrhenius公式和涡耗散方程;
Ri,r
' i,r
M
w,i
AB
k
p Yp
M N ''
j j,r w, j
• 净反应速率取两个速率中的较小值。
EDC模型的使用
• 适用条件:湍流,低Da数,预混、非预混和 部分预混燃烧;
• 案例: (1)湍流反应中的预混合有限比例现象; (2)CO的缓慢燃烧; (3)NOx的形成. • 限制条件: 占用CPU资源较多,默认使用ISAT算法加速
EDC模型FLUENT设置
1、选择EDC模型
容积比例常数 时间比例常数
• 快速燃烧假设:化学反应速率与湍流混合(扩散) 速率相比无穷快,即湍流燃烧过程由燃料和氧化 剂的混合过程控制。
• 整体反应速率由湍流混合控制; • Damkohiler数:
涡耗散模型概述
• 非预混火焰中:湍流“缓慢地”通过对流作用, 使燃料和氧化剂进入反应区,在反应区内快 速地燃烧;
• 非预混火焰中:湍流作用使冷的反应物和热 的生成物进入反应区,在反应区快速地燃烧;
•
' i,r
•
'' i,r
反应r中反应物i的化学计量数 反应r中生成物i的化学计量数
涡耗散模型理论
Ri,r
' i,r
M
w,i
AB
k
p Yp
M N ''
j j,r w, j
• 反应速率由大涡混合时间尺度 k / 控制, 只要出现 k / >0的情况,燃烧即可进行, 故不需要点火源;
《系统建模与仿真》 第三章
图3-7 子网模型
3.2 供给链系统建模方法
3.1.1 供给链管理决策与供给链模型
在供给连管理决策中,供给链模型主要描述供给链的决策内容。 供给链中的决策通常包括:采购决策、制造决策、运输决策、存储决 策和销售决策等
一般认为供给链模型至少应该能够为决策人员提供四方面的效劳: (1)确定在应用条件下最优的库存和效劳水平对应关系; (2)帮助决策人员分析、预测供给链中的不确定因素,确定平安库存 水平和订货策略,优化投资; (3)进行What-if分析,帮助决策人员评估各种方案以选择其中最有 利的方案; (4)进行面向供给链M的设计(Design-for-供给链M ),评价不同设 计和工艺对供给链运行中库存和效劳水平的影响,通过协调提高整体 效益。
表3.2 供给链管理决策内容
决策 短期决策内容
长期决策内容
采购 制造 运输 存储 销售
如何决定采购的材料种类、数量和日期等? 如何实现近期的生产任务? 如何安排运输车辆和路线? 如何制定履行定单计划? 按照何种顺序履行客户定单?
如何选择供应商?供应商的具体选择 个数?
如何快速响应全球客户的需求?决定 在何处设立分厂?
多企业〔特别是汽车行业企业〕都应用JIT方法进行管理,这样一种 方法要求企业加快对用户变化需求的反响速度,同时加强与合作伙伴 的合作。全球竞争中先进制造技术的开展要求企业将自身业务与合作 伙伴业务集成在一起,缩短相互之间的距离,站在整个供给链的观点 考虑增值,所以许多成功的企业都将与合作伙伴的附属关系转向建立 联盟或战略合作关系。
一般来说,供给链还具有以下特征: ①复杂性。因为供给链节点企业的组成跨度(层次)不同,供给链往
往由有多个、多类型的企业构成,它们之间的关系错综复杂,关联往 来和交易多。 ②动态性。供给链管理因企业战略和适应市场需求变化的需要,其中 的节点企业需要动态的更新和调整,这就使得供给链具有明显的动态 性。 ③面向用户需求。供给链的形成、存在、重构,都是基于一定的市场 需求而发生的,并且在供给链的运作过程中,用户的需求拉动是供给 链中信息流、产品、效劳流、资金流运作的驱动源。 ④交叉性。节点企业可以是这个供给链的成员,同时也可以是另外一 个供给链的成员,大多的供给链形成交叉结构,增加了协调管理的难 度。
系统建模与仿真-第3章 系统仿真方法与技术
3.4 系统仿真技术的应用
3.4.5 仿真技术在CIMS中的应用
(1)CIMS的需求分析仿真 (2)CIMS的设计仿真 (3)CIMS的仿真测试 (4)CIMS运行与维护的仿真支持
3. 5 系统仿真技术的特点
(1)安全性 (2)经济性 (3)可重复性
Add Your Company Slogan
3.2 系统仿真技术的分类
2.根据仿真计算机类型分类
根据所使用的仿真计算机类型也可将仿真分为三类: (1)模拟计算机仿真; (2)数字计算机仿真; (3)数字模拟混合仿真。
3.2 系统仿真技术的分类
3.根据仿真时钟与实际时钟的比例关系分类
实际动态系统的时间基称为实际时钟。而系统仿真时模 型所采用的时钟称为仿真时钟。根据仿真时钟与实时时 钟的比例关系,系统仿真分类如下: (1)实时仿真。 (2)亚实时仿真。 (3)超实时仿真。
3.4 系统仿真技术的应用
3.4.4 仿真在产品开发及制造过程中的应用
设计人员或用户甚至可“进入”虚拟的制造环境检验其 设计、加工、装配和操作,而不依赖于传统的原型样机的反 复修改。这样使得产品开发走出主要依赖于经验的狭小天地 ,发展到了全方位预报的新阶段。下图简要表示了虚拟制造 与实际制造的联系与区别。
(5) 试验时间太长、费用太大或者有危险等。
3.4 系统仿真技术的应用
3.4.3 仿真在教育与训练中的应用
训练仿真系统是利用计算机并通过运动设备、操纵设备、显 示设备、仪器仪表等复现所模拟的对象行为,并产生与之适 应的环境,从而成为训练操纵、控制或管理这类对象的人员 的系统。 根据模拟对象、训练目的,可将训练仿真系统分为三大类: (1)载体操纵型:这是与运载工具有关的仿真系统,包括航空 、航天、航海、地面运载工具,以训练驾驶员的操纵技术为 主要目的。 (2)过程控制型用于训练各种工厂(如电厂、化工厂、核电站 、电力网等)的运行操作人员。 (3)博弈决策型用于企业管理人员(厂长、经理)、交通管制人 员(火车调度、航空管制、港口管制、城市交通指挥等)和军 事指挥人员(空战、海战、电子战等)的训练。
生产线数字化仿真与调试(NX-MCD)-课件---第3章-运动副和约束

3.8 螺旋副
任务目标
1.螺旋副的概念
螺旋副(Screw Joint)能够使刚体运动围绕轴旋转并沿轴平移,例如能模拟螺栓的运动。
2.创建螺旋副
打开螺旋副对话框的方式有三种。如图所示。
第一篇 NX MCD基础篇
第3章 运动副和约束
Page 32
(1) 方式一
(2) 方式二
(3) 方式三
2024/3/3
3.8 螺旋副
3.螺旋副参数含义
1 2 3 4 5 6
Page 33
第一篇 NX MCD基础篇
第3章 运动副和约束
序号 1 2 3 4 5 6
参数名称 选择连接件 选择基本件 指定轴矢量
指定锚点 螺距 名称
含义 选择要由螺旋副约束的刚体 用于选择连接件链接到的刚体,若未选择,则连接件相对于大地运动 指定螺旋副应围绕其旋转的矢量 指定螺旋副应围绕其旋转的锚点 指定螺纹的螺距 设置螺旋副的名称
3.6 点在线上副
任务目标
1.点在线上副的概念
点在线上副(Point on Curve Joint)是指一个实体上的一点始终沿着一条曲线运动。
2.创建点在线上副
打开点在线上副对话框的方式有三种。如图所示。
第一篇 NX MCD基础篇
第3章 运动副和约束
Page 24
(1) 方式一
(2) 方式二
(3) 方式三
9
角度上限
以设置的轴矢量正方向为准,顺时针方向为角度上限,一般用于设置旋转的最大 角度
10
角度下限
以设置的轴矢量正方向为准,逆时针方向为角度下限,一般用于设置旋转的最小 角度
11
名称
设置柱面副的名称
2024/3/3
Multisim电路设计与仿真第3章Multisim 12.0的虚拟仪器使用方法

01 Multisim 12.0常用虚拟仪器
Multisim 12.0提供了类型丰富的虚拟仪器,用户 通过虚拟仪器可以分析运行结果,判断设计是否正确 合理。从仪器工具栏或用菜单命令(Simulation/ instrument)选用这些虚拟仪器,被选用后,各种虚 拟仪器都以面板的方式显示在电路中。
四通道示波器测试实例,按照图7连接电路图,观察D触发器 的输入和输出及时钟信号的波形,如图8所示。
图7四通道示波器测试电路
图8四通道示波器波形图
6)波特图仪(Bode Plotter)
波特图仪是一种用来测量和显示一个电路系统或放大器幅频 特性和相频特性的仪器,是交流分析的重要工具,类似于实际 电路测量中常用的扫频仪。其图标如图9所示。图标上有in+、 in-、out+、out-4个端子,其中in两个端子连接系统信号输入端 ,out两个端子连接系统信号输出端。需要注意,在使用波特图 仪时,必须在系统的信号输入端连接一个交流信号源或函数信 号发生器,此信号源由波特图仪自行控制不需设置。
双击函数信号发生器图标,弹出函数信号发生器的参数设 置控制面板,如图3所示。
图3函数信号发生器
Waveforms:波形选择区用于选择输出波形,分别为正弦波 、三角波、矩形波。
Frequency:频率设置,用于设置输出信号的频率,可选范 围1 fHz~1 000 THz。
Duty Cycle:占空比设置用于设置输出的三角波和方波电压 信号的占空比,设定范围1%~99%。
第三章ADAMS仿真

3 双振动体惯性往复近共振筛的ADAMS动力学仿真分析3.1 多刚体动力学仿真分析软件ADAMS简介ADAMS是由美国MDI研发的对机械系统的运动学及动力学有强大分析功能的虚拟样机分析软件,它采用交互式图形环境和零件库、约束库、力库,建立完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格朗日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。
ADAMS软件的仿真可用于预测机械系统的性能、运动范围、碰撞检测、峰值载荷以及计算有限元的输入载荷等。
ADAMS软件由基本模块、扩展模块、借口模块、专业领域模块及工具箱组成。
用户不仅可以采用通用模块对一般的机械系统进行仿真,而且可以采用专用模块对特定工业应用领域的问题进行快速有效的建模和仿真分析。
其中基本模块主要包括以下几种:(1)用户界面模块(ADAMS/view)ADAMS/view是ADAMS系列产品的核心模块之一,提供了丰富的零件几何图形库、约束库和力/力矩库及图形快捷键和菜单快捷键,采用Parasolid作为实体建模的核,并且支持布尔运算,具有界面友好、操作方便的特点。
在建模过程中,ADAMS自动将相邻的实体赋予不同的颜色,以便区分,色彩渲染效果逼真。
模型的缺省材料为钢,而且各部分实体重心缺省位置在其形心,实体转动惯量由ADAMS根据实体尺寸以钢为缺省材料算出,上述属性均可由用户根据实际情况修改,用户甚至可以改变重力加速度的大小和方向(2)求解器模块(ADAMS/Solve)ADAMS/Solve可以对刚体和弹性体进行仿真分析。
为了进行有限元分析和控制系统研究,用户除要求软件输出位移、速度、加速度和力外,还可要求模块输出用户自己定义的数据。
用户可以通过运动副、运动激励、高副接触、用户定义的子程序等添加不同的约束。
用户同时可求解运动副之间的作用力和反作用力,或施加单点外力。
第三章_离散仿真

事件子程序
每一类事件对应一个事件子程序,相应的事件发生时就 转入该事件子程序进行处理,更新系统状态,产生新的 事件。
统计报告子程序 随机数发生器 主程序
调用时钟推进子程序,控制转移到相应的事件子程序, 完成仿真程序的总体控制。
开始 输入参数 调用初始化程序; 仿真时钟初始化;系统状态初始化; 事件初始化;统计计数器初始化; 调用时间推进子程序; 搜索下一事件(类型i);推进仿真时钟
基本概念
实体
构成系统的各种成分称为实体,是系统的研究对象。 临时实体、永久实体。
属性
反映实体的某些性质。
状态
在某一确定时间点,系统的状态是系统中所有实体属 性的集合。
基本概念
事件
引起系统状态发生变化的行为,它是在某一时间点上的 瞬间行为。
活动
实体在某一状态的持续过程。
进程
进程由和实体相关的事件及若干活动组成,一个进程描 述了它所包括的事件及活动间的相互逻辑关系和时序关 系。
离散系统仿真 程序流程图
调用第i类事件子程序; 执行事件、修改系统属性;收集、计数统计量; 产生未来事件,并调度子程序, 将未来事件插入事件表
否
到达预定仿真时间
调用报告子程序; 根据统计计数器进行统计分析; 输出分析报告 结束
离散系统仿真策略
建立描述系统行为的仿真模型
由于系统采用伪随机数,可以得到确定的状态转移函 数,模型采用流程图或网络图的形式。
离散系统仿真程序的结构
状态变量; 时钟变量; 事件表(按时间顺序记录仿真过程中将要发生的事件)
统计计数器 初始化子程序 时钟推进子程序 (由事件表确定下一事件,然后将将仿真时钟推进到该事件 发生的时间) 调度子程序(将仿真过程中产生的未来事件插入事件表)
工业机器人虚拟仿真技术第3章 机器人虚拟仿真工作站构建

加载本地文件
导入工具模型:吸盘工具.tool 点击“打开”
二 、工作站对象的导入及布局
导入工具模型“吸盘工具.tool”,工具自动安装到机器人法兰上。
导入的工具模型,自动安装到法兰上
C 目录 ONTENTS
一、学习目标 二、工作站对象的导入及布局 三、创建工具模型及修改工具坐标系 四、创建工件坐标系及目标点 五四、、课课后后练练习习
参照对象 新建工作站 新建工作站 新建工作站 新建工作站 新建工作站
五、课后练习
使用本章节案例,练习以下内容: ② 练习2:创建工具模型 ,要求:工具坐标系值为【0,0,245,90,0,0】; ③ 练习3:创建工件坐标系,要求:坐标系名称为用户坐标系,数值为 【300, 150, 50, 90, 0, 0】; ④ 练习4:创建目标点,要求:目标点名称为原点,数值为 【-150, -102, 258,90, 0,180】
三 、创建工具模型及修改工具坐标系
创建工具模型的步骤:先导入工具的三维模型,然后创建工具模型。
加载本地文件
导入工具的三维数模,“吸盘工具.STEP”
三 、创建工,拖动到机器人对象上,工具将安装到机器人法兰上。
将三维模型拖动到机器人上,三维 模型变成工具模型
选择对象的三维模型“工作站”
单击“打开”
二 、工作站对象的导入及布局 – 工作站布局
工作站对象的布局:双击打开对象属性界面,修改对象的位置。
双击导入的对象,打开对象的属性界面
在属性界面中,修改位置数据,实现 工件的布局
二 、工作站对象的导入及布局 – 机器人模型导入
RoboDK中机器人模型是特定的模型(robot格式)。机器人模型的导入步骤:
第3章(213) 教材配套课件

第 3 章 MATLAB的仿真测量仪器
图3-9 七踪信号显示在同一示波器上的仿真框图
第 3 章 MATLAB的仿真测量仪器
图3-10 七踪信号显示在同一示波器上
第 3 章 MATLAB的仿真测量仪器
其次是有一个Constant(常数矢量), 它是一个7列的行 矢量。 在运行时叠加在信号发生器输出的7列数据流上, 譬如 第7列信号的每一个值加上了3.6, 相当于直流电平增加了3.6 V, 在示波器上波形垂直平移了3.6 V(等效于调节了示波器 的垂直位移旋钮)。 应用这样的方法可以将每一列信号移动 到希望摆放的位置。 示波器参数设置时, 应考虑到多踪信号 与常数矢量叠加后, 在垂直方向占有较大的空间。 Y量程的 上、 下限Y max、 Y min设置范围不够大时, 有的信号就 看不见了(在屏幕外)。 表3-9~表 3-11分别显示信号源、 常 数、 示波器的主要参数。 表3-12显示了图3-9仿真系统的 Simulation Parameters(仿真时间参数)的设置。
3.3.1 示波器
无论是通信还是信号与系统分析, 电子工程领域的绝大 多数信号是时间的函数, 系统的时间域特性也用冲激响应来 描述。 从事信号与系统的分析和试验离不开时间域的测量仪 器。
让人们最先想到的时间域的测量仪器就是普通示波器和 数字存储示波器。
示波器最基本的构成如下:
第 3 章 MATLAB的仿真测量仪器
表3-6显示了Generic Numeric LED(通用数字发光二极管) 的主要参数。 通过参数设置可以得到不同的背景色, 发光二 极管的开启、 关闭的颜色, 笔画的宽度、 间距, 显示器的位 数等。
第 3 章 MATLAB的仿真测量仪器
第 3 章 MATLAB的仿真测量仪器
第三章:石块自由落体的仿真分析
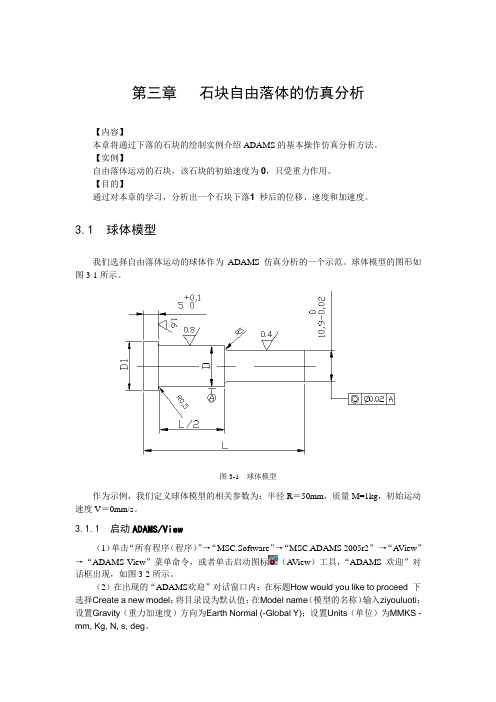
第三章石块自由落体的仿真分析【内容】本章将通过下落的石块的绘制实例介绍ADAMS的基本操作仿真分析方法。
【实例】自由落体运动的石块,该石块的初始速度为0,只受重力作用。
【目的】通过对本章的学习,分析出一个石块下落1 秒后的位移、速度和加速度。
3.1 球体模型我们选择自由落体运动的球体作为ADAMS仿真分析的一个示范。
球体模型的图形如图3-1所示。
图3-1 球体模型作为示例,我们定义球体模型的相关参数为:半径R=50mm,质量M=1kg,初始运动速度V=0mm/s。
3.1.1 启动ADAMS/View(1)单击“所有程序(程序)”→“MSC.Software”→“MSC.ADAMS 2005r2”→“A View”→“ADAMS-View”菜单命令,或者单击启动图标(A View)工具,“ADAMS欢迎”对话框出现,如图3-2所示。
(2)在出现的“ADAMS欢迎”对话窗口内:在标题How would you like to proceed 下选择Create a new model;将目录设为默认值;在Model name(模型的名称)输入ziyouluoti;设置Gravity(重力加速度)方向为Earth Normal (-Global Y);设置Units(单位)为MMKS - mm, Kg, N, s, deg。
(3)选择OK。
图3-2“ADAMS欢迎”对话框2.1.2 创建石块(1)在特征管理器设计树中选择“右视基准面”,如图2-3所示,单击标准工具栏上的(正视于)工具,正视于右视基准面;再单击草图绘制工具栏上的(草图绘制)工具,此时,在右视基准面上打开一个草图。
(2)单击草图绘制工具栏上的(圆)工具,开始在草图内作圆。
(3)将指针移到草图原点处,当指针变为时,表示指针正位于原点上。
单击鼠标左键,然后开始移动指针以生成圆形。
移动指针时,请注意指针显示了该圆形的半径尺寸。
单击鼠标左键完成圆形绘制。
Multisim9电子技术基础仿真实验第三章十逻辑转换仪1
(2)将逻辑电路的输出端(有多个输出端 时接入其中之一)接逻辑转换仪的输出端。
Multisim 9 电路设计入门 chz634187
第3章
虚 拟 仪 器 的 使 用
(3)双击逻辑转换仪图标,展开仪器面板。
Multisim 9 电路设计入门 chz634187
第3章
虚 拟 仪 器 的 使 用
(4)根据逻辑电路输入端数量,点击面板上边的 逻辑变量,这些逻辑变量的所有组合就在面板左侧 以真值表的形式列出,但右侧一栏暂时为?。
Multisim 9 电路设计入门 chz634187
第3章
虚 拟 仪 器 的 使 用
3.10.1 面板显示及功能
输入端
真值表区
逻辑表达 式区
逻辑转换仪面板
输出端
逻辑电路转换为真 值表按钮
真值表转换为逻辑 式按钮
真值表转换为简化 逻辑式按钮
逻辑式转换为真值 表按钮
逻辑式转换为逻辑 电路按钮
逻辑式转换为与非 门逻辑电路按钮
用
表—表达式”按键。相应的逻辑表达式就出现在面 板下边的逻辑表达式区。
Multisim 9 电路设计入门 chz634187
பைடு நூலகம் 第3章
虚
拟
仪
器
的
使
(5)若按动面板右侧转换方式栏内的“真
用
值表—简化表达式”按键,则得简化表达式或者直 接由真值表得到简化的逻辑表达式。
Multisim 9 电路设计入门 chz634187
Multisim 9 电路设计入门 chz634187
第3章
虚 拟 仪 器 的 使 用
(5)按动面板右侧转换方式(Conversions) 栏内的“电路—真值表”按键 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(1)基于方程的建模仿真(Equation based Modeling Methods) 基于方程的方法主要是采用系统动力学的方法。系统动力学是美国麻省理工 学院(MIT)的系统动力学小组在50年代创立和发展起来的一门学科。 (2)基于离散事件仿真的建模方法(Di供应链rete Event Simulation based Modeling Methods) 对供应链仿真的研究主要是利用离散事件仿真,并综合利用运筹学、软计算 等优化及建模技术,重点解决供应链系统中供应链设计、位置决策、库存管 理决策等战略决策问题 (3)基于多智能自主体的建模方法(Multi-Agent SimulБайду номын сангаасtion based Modeling Methods) 智能主体(Agent,又称为代理)属于计算机和人工智能领域的范畴。
ri X ij Q1rj TC q2 j ( )1rj H1rj ( n1rj 1rj ) 1rj (1 S1rj ) ri X ij 2 iFrj iFrj Q1rj
s irj
对于制造商生产子系统,其控制成本模型如下:
TC ij TC
第三章 供应链系统建模与优化
1
3.1供应链的概念及其特征
3.1.1 供应链的概念
在《中华人民共和国国家标准·物流术语》[GB/T18354-2001]中,对供应链的 定义是“供应链(Supply Chain)是生产及流通过程中,涉及将产品或服务提供给 最终用户活动的上游与下游企业所形成的网链结构” 。我们对这个术语可以这样 来理解,即供应链是围绕核心企业,通过对信息流、物流、资金流的控制,从采购 原材料开始,制成中间产品以及最终产品,最后由销售网络把产品送到消费者手中 的将供应商、制造商、分销商、零售商直到最终用户连成一个整体的功能网链结构 模式。
3.1.2 供应链的特征 供应链作为习惯称呼,是从上、下游关系来理解从供应商的供应 商到用户的用户的关系。但事实上不可能是单一链状结构,而是交错 链状的网络结构(Supply Network)。在供应链竞争中,企业的竞争模 式是这样的:企业处于相互依赖的网络中心,这个网络中的参与者通 过优势互补结成联盟,供应链之间的竞争是通过这种网络进行竞争的 。因此,为了在供应链竞争中处于领导地位,必须在内部整合的基础 上,集中于供应链的网络管理。供应链时代的网络竞争建立在高水平 的、紧密的战略发展规划基础上,这就要求供应链中各合作者必须共 同讨论网络的战略目标和实现战略目标的方法及手段,在相互合作中 ,共同提高绩效以获得双赢。这里的双赢不是指参与的双方各取赢利 的50%,而是指所有的合作者都从合作中受益。
图3-7 子网模型
C1
F
3.2 供应链系统建模方法
3.1.1 供应链管理决策与供应链模型
在供应连管理决策中,供应链模型主要描述供应链的决策内容。供应链 中的决策通常包括:采购决策、制造决策、运输决策、存储决策和销售决策等 一般认为供应链模型至少应该能够为决策人员提供四方面的服务: (1)确定在应用条件下最优的库存和服务水平对应关系; (2)帮助决策人员分析、预测供应链中的不确定因素,确定安全库存水平和订 货策略,优化投资; (3)进行What-if分析,帮助决策人员评估各种方案以选择其中最有利的方案; (4)进行面向供应链M的设计(Design-for-供应链M ),评价不同设计和工艺对 供应链运行中库存和服务水平的影响,通过协调提高整体效益。
表3.2 供应链管理决策内容
决策 采购 制造 运输 存储 销售 短期决策内容 如何决定采购的材料种类、数量和日期等? 如何实现近期的生产任务? 如何安排运输车辆和路线? 如何制定履行定单计划? 按照何种顺序履行客户定单? 长期决策内容 如何选择供应商?供应商的具体选择 个数? 如何快速响应全球客户的需求?决定 在何处设立分厂? 如何建立供应链运输网络?是否寻找 运输商? 如何设计营销网络?如何选择建立仓 库? 销售预测;以及对预测信息的处理方法 ?
四、各种方法的比较分析
表3.3 各种建模方法的比较 基于运筹学的建模 近似方法 基于仿真优化的方法
方法
基本 思想
并不将系统当成对 象来对待,用线性 和代数的公式来为 相互关系和约束建 模。 LP用简单的方法, 矩阵论,IP用分支 定界约束:MIP用启 发的方法。
分散的网络用节点和连 线图形化地表示出来, 网络关系转化成为数学 模型或者线性与整数模 型。
二、近似方法 近似方法在供应链M 中主要用于经营性决策。把近似方法应用于 供应链M,是从库存管理的角度来处理问题,把其中的生产和运输环 节近似为定常过程。这样建立的供应链模型一般被称作多级库存系统 ,主要研究在同时考虑多级库存的情况下建立库存控制策略及确定控 制参数。
对供应链中多级库存问题的研究表明,它在降低库存、提高用户 服务水平等方面能够起相当大的作用,但还是存在着一些比较明显的 缺陷,如: ① 只注重供应链中的库存,而忽视了其中的生产和运输问题,更不要 说与它们之间的协调; ② 目前处理的系统结构都只限于树状结构,而不是实际的网状结构; ③ 对模型的约束太多,由于求解需要,对需求、延迟时间分布等使用 了一些近似的假设; ④ 忽略了非平稳随机因素的存在。这些缺陷限制了有关研究结果在实 际问题中的应用。 ⑤ 除多级库存理论外,在制造系统研究中用得比较多的排队网理论、 流体近似方法等也应该属于此类,它们能够考虑生产或运输环节的随 机性,而且研究得也已经比较深入,因此有可能在供应链M 研究中作 为一种有效的方法,但目前在该领域几乎还没有被使用。
(1) 线性方程(LP)模型 在线性模型中,用线性的数学关系建立问题的模型。没有引入现实的 实体,只是引入了它们之间的关系以及对所考虑的目标函数的影响。 模型没有定性的分析,模型中每个物体都是定量的。 (2)整数/混合整数规划模型(IP/MIP) IP模型和LP模型是相似的,只是决策变量必须是整数(0, 1, 2.,)。它 们较多地用于产品和设备的方面的后勤分析;不可能建立1.5个工厂或 建立2.3个仓库。 (3)网络模型 网络模型,同时也称优化模型,是供应链分布的网络图形表示形式。
TC
TC
F 2 ij
P 2ij
TC , i, j
F 2 ij
P 2 ij
e2ij (
X ij Q 2ij
) ij X ij ij X ij t 2ij
K
q 2 j [ H 2ij (
Q2ij 2
n2ij 2ij ) xijk Qijk Tijk cij
二、供应链的网状结构模型
C1 B1 B2
… ……
C2 C3
…
D1 D2 Dk
Bn
Cm
图3-3 供应链的结构模型Ⅲ
1. 入点和出点
A B
G C E F
D
H
图3-4 入点和出点
A1
A2
B1 A C B2
C B D
图3-5 包含出点和入点的厂商
E
图3-6 包含供应商和分销商的厂商
2. 子网
D A C2 B C3 C4 E
2
这个定义具有以下特点: ①它是一个范围更广的企业结构模式,它包含所有加盟的节点企业, 从原材料的供应开始,经过链中不同企业的制造加工、组装、分销等 过程直到最终用户; ②它不仅是一条联接供应商到用户的物料链、信息链、资金链,而且 是一条增值链,物料在供应链上因加工、包装、运输等过程而增加其 价值,给企业都带来收益; ③在这个网络中,每个贸易伙伴既是其客户的供应商,又是其供应商 的客户,它们既向上游的贸易伙伴订购产品,又向下游的贸易伙伴供 应产品。
一般来说,供应链还具有以下特征:
①复杂性。因为供应链节点企业的组成跨度(层次)不同,供应链往往由有多 个、多类型的企业构成,它们之间的关系错综复杂,关联往来和交易多。 ②动态性。供应链管理因企业战略和适应市场需求变化的需要,其中的节点 企业需要动态的更新和调整,这就使得供应链具有明显的动态性。 ③面向用户需求。供应链的形成、存在、重构,都是基于一定的市场需求而 发生的,并且在供应链的运作过程中,用户的需求拉动是供应链中信息流、 产品、服务流、资金流运作的驱动源。 ④交叉性。节点企业可以是这个供应链的成员,同时也可以是另外一个供应 链的成员,大多的供应链形成交叉结构,增加了协调管理的难度。 ⑤创新性。供应链夸大了原有的单个企业的物流渠道,充分考虑了供应链整 个物流过程以及影响此过程的各个环节和因素。 ⑥风险性。供应链的需求 匹配是一个持续性的难题,供应链上的消费需求和生产供应,始终存在着时 间差和空间分割。
3.1.3 供应链的结构模型
A B C D E
A
B
C
D
E
自 然 界
供 应 商
制 造 商
分 销 商
用 户
图3-1 供应链的结构模型Ⅰ
图3-2 供应链的结构模型Ⅱ
1. 供应链的方向 在供应链上除了有物流和信息流外,还存在资金流。在正常情况下, 物流的方向一般都是从供应商流向制造商,再流向分销商。在供应商 的研究中,我们也按照物流的方向来定义供应链的方向,以确定供应 商、制造商和分销商之间的顺序关系。模型Ⅱ中的箭头方向即表示供 应链的物流方向。 2. 供应链的级 在模型Ⅱ中,定义C为制造商时,可以相应地认为B为一级供应商,A 为二级供应商,而且还可依次地定义三级供应商、四级供应商…同样 ,可以认为的D为一级分销商,E为二级分销商,并依次地定义三级分 销商,四级分销商…一般地讲,一个企业应尽可能考虑多个供应商或 分销商,这有利于从整体上了解供应链的运行状态。
三、基于仿真优化的方法 系统仿真(也称计算机仿真或计算机模拟)是通过建立仿真模型 ,在计算机上再现真实系统,并模拟真实系统的运行过程而得到系统 解的研究方法。 虽然仿真模型非常准确,但是也要有一定的代价:从决策者的立场 看,在采用仿真优化模型的同时,还要有更好的决策支持方法。最坏 的情况是:很多分析人员用仿真的方法为供应链和物流问题建模, 然后 进行的人工评价和比较,而不运用任何有效的模型求解等决策支持方 法。