《现代控制理论基础》习题解答
《现代控制理论》课后习题全部答案(最完整打印版)

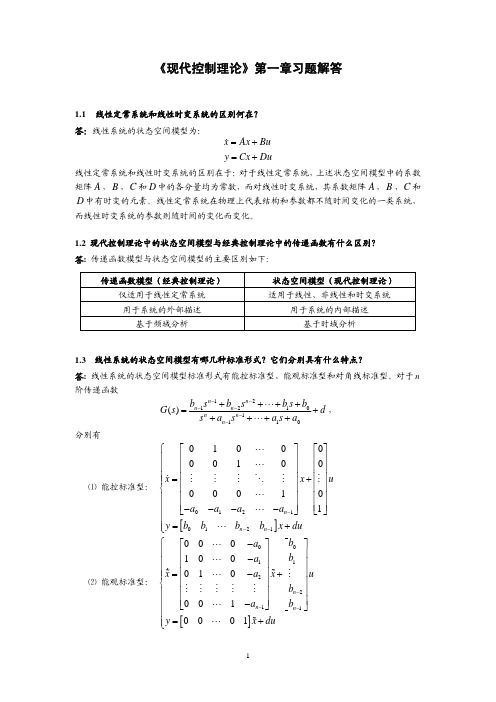
第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
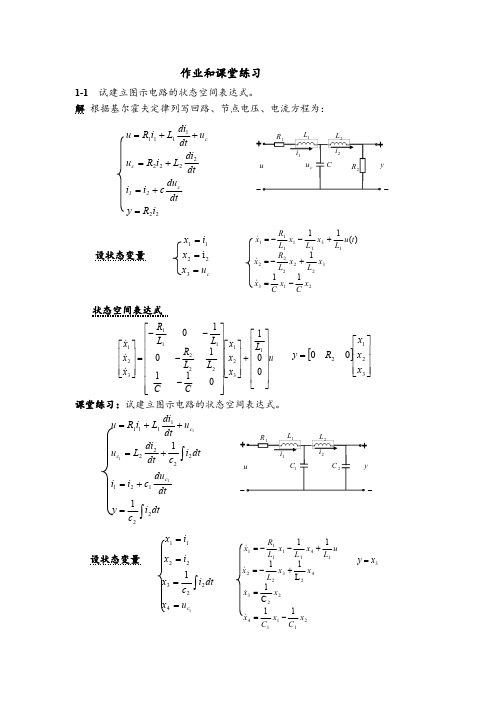
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙阿令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
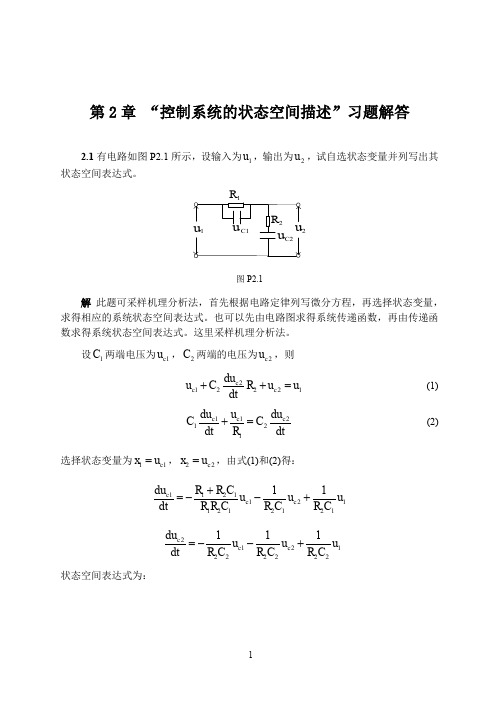
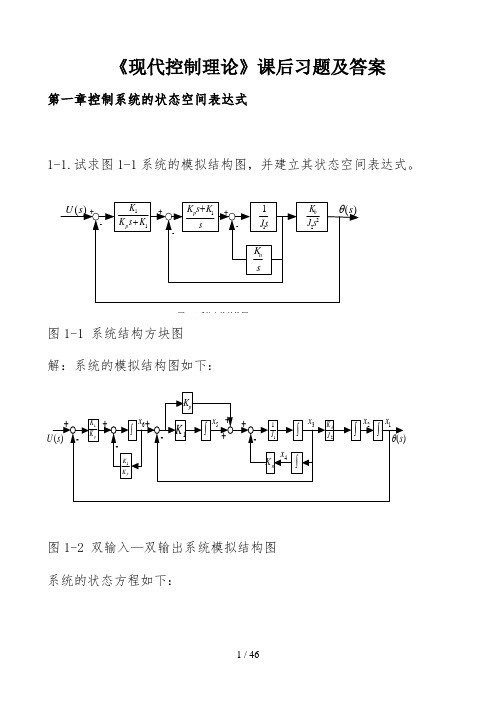
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
现代控制理论基础习题解答
+ +
y
1
1
x3
s
3
1-4 已知系统的传递函数,试列写出状态空间表达式,并画出状态变量图。 (1)解
a 3 1, a 2 0,
G (s)
a 1 0,
s 2 2s 3 s3 1
b 0 0,
+
b1 1,
b 2 2,
b3 3
状态变量图为
1
U ( s) E ( s) 1
y 1 0 0x
状态变量图:
u
3
_
3 1 x3 1 x 2 1 x1 y x s s s5
5
+
3
作业和课堂练习
课堂练习: 已知系统的传递函数, 试列写出状态空间表达式, 并画出状态变量图。
G (s)
3s 4 s(s 1)(s 3)
s1 0 , s 2 -1, s 3 -3
y 1 0 0x
状态变量图:
u
2
3 1 x3 x _ s5
5
+
+
2 s x
1
x 2 1 x1 y
s
3
方法二: 状态空间表达式:
0 0 x a 3 1 0 -a2 0 0 1 x 0 u a1 1
u _
L2
i2
C22
x1 i1
R1 1 1 x1 x4 u L1 L`1 L1 1 1 2 x x3 x4 L2 L2 1 3 x x2 C2 1 x 4 x 1 1 x1 x2 C1 C1
设状态变量
x 2 i2 x3 1 i2 dt c2
现代控制理论习题答案(2)

第二章2-3 已知矩阵⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=452100010A ,试用拉氏反变换求e At 解:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=-4521001s s s A sI ⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡-+--+-----+--+--+---+--+-----+--+--+---+-------+--+--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---+---=--2413)1(12818)1(32414)1(22212)1(12415)1(32212)1(22212)1(12212)1(321)1(2522)4(21454)2()1(1)(2222222222221s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s A sI ⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡-+--+-----+--+--+---+--+-----+--+--+---+-------+--+--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---+---=--2413)1(12818)1(32414)1(22212)1(12415)1(32212)1(22212)1(12212)1(321)1(2522)4(21454)2()1(1)(2222222222221s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s A sI[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+---++--+---+--+---++-=-=--t t t tt t t t t t t t t t t t t t t t t t t t tt At e e te e e te e e te e e te e e te e te e e e te e e te e te A sI L e 2222222221143883442224532222232)(2-4 用三种方法计算以下矩阵指数函数e At , (1) ⎥⎦⎤⎢⎣⎡-=0410A 解:(1)化为约旦标准型04412=+=⎥⎦⎤⎢⎣⎡-=-λλλλA I j j 2,221-==λλ⎥⎦⎤⎢⎣⎡-=j j T 2211 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=-j j T 412141211⎥⎥⎦⎤⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+--+=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=Λ=------t t t t e e e e j e e j e e j j e e j j T T e jt jt jtjt jt jt jt jt jt jtAt 2cos 2sin 22sin 212cos )(21))()(41)(21412141210221122222222221(2)拉普拉斯变换⎥⎦⎤⎢⎣⎡-=-s s A sI 41 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+++-+=⎥⎦⎤⎢⎣⎡-+=--4444144141)(222221s s s s s s s s s A sI[]⎥⎥⎦⎤⎢⎢⎣⎡-=-=--t t t t A sI L e At 2cos 2sin 22sin 212cos )(11(3)凯莱-哈密顿定理⎥⎥⎦⎤⎢⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡---t t e e j j e e j j jt jt jt jt 2sin 212cos 4141212121212222110αα⎥⎥⎦⎤⎢⎢⎣⎡-=⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡=+=t t t t t t A I e At 2cos 2sin 22sin 212cos 04102sin 2110012cos 10αα(2) ⎥⎦⎤⎢⎣⎡=1411A解:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++-+-+=Φ----)(21)()(41)(21)(3333tt tt t t tt e e e e e e e e t2-5 下列矩阵是否满足状态转移矩阵的条件,如果满足,试求出与子对应的A 阵(2)⎥⎥⎦⎤⎢⎢⎣⎡-=Φ--t t e e t 220)1(211)( (4)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++-+-+=Φ----)(21)()(41)(21)(3333tt tt t t tt e e e e e e e e t 状态转移矩阵的条件()()(0)()()()t A t It t ττΦ=ΦΦ=ΦΦ=Φ+ 求取A 的方法:1(())()()()()()t L t sI A t A t t A A t -=Φ=-Φ=Φ=Φ=Φ解(2)此矩阵是状态转移矩阵1)(210)211(211))((--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++-=ΦA sI s s s s t L⎥⎦⎤⎢⎣⎡+-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+++=-20110)121(2121)2()(s s s ss s s s A sI ⎥⎦⎤⎢⎣⎡-=2010A(4)此矩阵是状态转移矩阵1)(14113)(1(1)3111(21)3111)3111(41)3111(21))((--=⎥⎦⎤⎢⎣⎡-----+=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-++-++--++--++=ΦA sI s s s s s s s s s s s s t L )⎥⎦⎤⎢⎣⎡----=-1411s s A sI ⎥⎦⎤⎢⎣⎡=1411A2-6 求下列状态空间表达式的解[]xy u x x 01100010=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=解:⎥⎦⎤⎢⎣⎡=0010A ⎥⎦⎤⎢⎣⎡-=-s s A sI 01 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎦⎤⎢⎣⎡=--s s s s s s A sI 1011011)(221[]⎥⎦⎤⎢⎣⎡=-=--101)(11t A sI L e At ⎥⎥⎦⎤⎢⎢⎣⎡+++=⎥⎥⎦⎤⎢⎢⎣⎡+⎥⎦⎤⎢⎣⎡+=⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡+=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=-Φ+=⎰⎰⎰t t t t t t d t t d t t d Bu t x e t x t t tAt 1212111111010111101)()()(220000ττττττ2-7 试证本章2-3,在特定控制作用下,状态方程式(2-25)的解,式(2-30),式(2-31)和式(2-32)成立(2)0)0(),()(x x t k t u ==δBKe x e d BK e x e d BK e x e t x At At t A Attt A At +=+=+=⎰⎰+---000)(00)(0)()()(ττδττδττ(3)0)0(),(1)(x x t K t u =⨯=(4)0)0(),(1)(x x t Kt t u =⨯=2-9根据系统的方框图可得212121112x x y u x xku x x+=-=+-=[]⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡212121121000101x x y u k x x x x[]⎥⎦⎤⎢⎣⎡-=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎪⎪⎪⎪⎭⎫⎝⎛+-++=⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛++=⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛-+=-=--------1101111011)1(1110)1(1101)(111111t t At e e s s s s s s L s s s s L s s L A sI L e⎥⎦⎤⎢⎣⎡-==--110)(T T ATe e eT G⎥⎦⎤⎢⎣⎡-=100k B ⎥⎦⎤⎢⎣⎡-+--=⎥⎦⎤⎢⎣⎡-⎥⎦⎤⎢⎣⎡+--=⎥⎦⎤⎢⎣⎡-⎥⎦⎤⎢⎣⎡-==------⎰⎰T e T k e k k T eT e k dt e e B dt e H T TT TTT T TAT)1(0)1(1001011001100当T=0.1时⎥⎦⎤⎢⎣⎡-==--110)1.0()(1.01.0ee G T G ⎥⎦⎤⎢⎣⎡-+--==--1.0)9.0(0)1()1.0()(1.01.0e k e k H T H当T=1时⎥⎦⎤⎢⎣⎡-==--110)1()(11e e G T G ⎥⎦⎤⎢⎣⎡--==--10)1()1.0()(11kee k H T H 2-11根据上面的模拟结构图,求去连续的状态方程,进而化成离散状态方程。
现代控制理论习题解答(第一章)

Ra
La
i f = 常数
ua
f ia D J
ω
ML
【解】: 设状态变量为:
题 1-2 图
⎡ x1
⎢ ⎣
x
2
⎤ ⎥ ⎦
=
⎡ia ⎢⎣ω
⎤ ⎥ ⎦
其中 ia 为流过电感上的电流, ω 电动机轴上的角速度。 电动机电枢回路的电压方程为:
eb 为电动机反电势。 电动机力矩平衡方程为
•
ua = La ia + Ra ⋅ ia + eb
(4) y (4) + 3y + 2y = −3u + u
【解】:
5
在零初始条件下,方程两边拉氏变换,得到传递函数,再根据传递函数求状态空间 表达式。 此题多解,一般写成能控标准型、能观标准型或对角标准型,以下解法供参考。 (1)传递函数为:
状态空间表达式为:
G(s) =
2
s3 + 2s2 + 4s + 6
1⎤
R 2 C1 −1
R2C2
⎥ ⎥ ⎥
⎡ ⎢ ⎣
x1 x2
⎥⎦
⎤ ⎥ ⎦
+
⎡ ⎢ ⎢ ⎣
1
R1C1 0
⎤ ⎥⎥u i ⎦
y = u0 = [0
1]⎢⎡
⎣
x1 x2
⎤ ⎥ ⎦
(2)
设状态变量: x1 = iL 、 x2 = uc 而
1
根据基尔霍夫定律得: 整理得
•
iL = C uc
•
ui = R ⋅ iL + LiL + uc
•
M D = J ω + fω + M L
《现代控制理论》课后习题答案1.pdf

《现代控制理论》第一章习题解答1.1 线性定常系统和线性时变系统的区别何在? 答:线性系统的状态空间模型为:xAx Bu y Cx Du=+=+线性定常系统和线性时变系统的区别在于:对于线性定常系统,上述状态空间模型中的系数矩阵A ,B ,C 和中的各分量均为常数,而对线性时变系统,其系数矩阵D A ,B ,C 和中有时变的元素。
线性定常系统在物理上代表结构和参数都不随时间变化的一类系统,而线性时变系统的参数则随时间的变化而变化。
D 1.2 现代控制理论中的状态空间模型与经典控制理论中的传递函数有什么区别? 答: 传递函数模型与状态空间模型的主要区别如下:传递函数模型(经典控制理论)状态空间模型(现代控制理论) 仅适用于线性定常系统 适用于线性、非线性和时变系统用于系统的外部描述 用于系统的内部描述基于频域分析基于时域分析1.3 线性系统的状态空间模型有哪几种标准形式?它们分别具有什么特点?答: 线性系统的状态空间模型标准形式有能控标准型、能观标准型和对角线标准型。
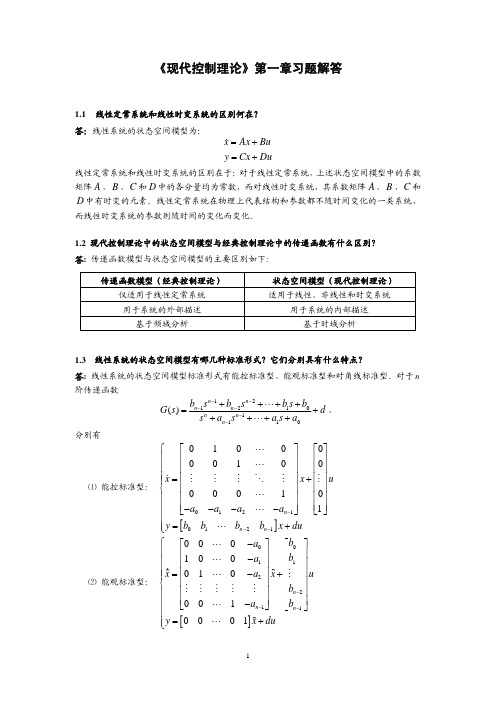
对于阶传递函数n 1212101110()n n n n n n n b s b s b s b G s d s a s a s a −−−−−−++++=+++++"",分别有[]012101210100000100000101n n n xx ua a a a yb b b b x du−−−⎧⎡⎤⎪⎢⎥⎪⎢⎥⎪⎢⎥=+⎪⎢⎥⎨⎢⎥⎪⎢⎥⎪−−−−⎣⎦⎪=+⎪⎩"" ###%##"""⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⑴ 能控标准型:[]0011221100010********001n n n b a b a xa x ub a b y xdu −−−⎧−⎡⎤⎡⎤⎪⎢⎥⎢⎥−⎪⎢⎥⎢⎥⎪⎢⎥⎢⎥=−+⎪⎢⎥⎢⎥⎨⎢⎥⎢⎥⎪⎢⎥⎢⎥⎪−⎣⎦⎣⎦⎪=+⎪⎩"" "######""⑵ 能观标准型:[]1212001001001n n p p x x up y c c c x du⎧⎡⎤⎡⎤⎪⎢⎥⎢⎥⎪⎢⎥⎢⎥=+⎪⎢⎥⎢⎥⎨⎢⎥⎢⎥⎪⎣⎦⎣⎦⎪⎪=+⎩"" ##%##""⑶ 对角线标准型: 式中的和可由下式给出,12,,,n p p p "12,,,n c c c "12121012111012()n n n n n n n n nb s b s b s bc c c G sd d s a s a s a s p s p s p −−−−−−++++=+=++++++−−−"""++能控标准型的特点:状态矩阵的最后一行由传递函数的分母多项式系数确定,其余部分具有特定结构,输出矩阵依赖于分子多项式系数,输入矩阵中的元素除了最后一个元素是1外,其余全为0。
现代控制理论课后习题答案

现代控制理论课后习题答案第⼀章习题1.2求下列多项式矩阵()s D 和()s N 的两个不同的gcrd:()2223(),()1232s s s s s s s s s ??++== ? ?+-??D N 解:()()22232321s s s s s s s++ =++ ? ?D S N S ; ()3r 2,1,2E -:223381s s s s s s ??++ ?-- ? ???;()3r 2,3,3E :223051s s s s s ??++ ?- ? ???;()3r 1,3,2E s --:01051s s ?? ?- ? ;()3r 2,1,5E s -:01001s ?? ?;()3r 3,1,1E -:01000s ?? ? ? ???;()1r 2,3E :01000s ?? ? ? ???;()1r 1,2E :00100s ?? ?;所以⼀个gcrd 为001s ??;取任⼀单模矩阵预制相乘即可得另⼀个gcrd 。
1.9 求转移矩阵t A e (1)已知1141??=A ,根据拉⽒反变换求解转移矩阵tA e 。
(2) 已知412102113-?? ?= ? ?-??A ,根据C-H 有限项展开法求解转移矩阵t A e 。
解:(1)11()41s s s --??-= ?--??I A1110.50.50.250.2511(3)(1)(3)(1)13131()4141110.50.5(3)(1)(3)(1)(3)(1)3131s s s s s s s s s s s s s s s s s s s s s s s --+---+-+??-+-+ ? ?-=== ? ?---+ ?-+ ? ?-+-+-+-+?I A 3311330.5e 0.5e 0.25e 0.25e e ()e e 0.5e 0.5e t t t t t t tt t s ------??+-??=-= ??? ?-+?A L I A (2)由2412()12(1)(3)0113λλλλλλ--?? ?=--=--= ? ?--??A I -,得1,233,1λλ== 对1,23λ=,可以计算1,2()2rank λ=A I -,所以该特征值的⼏何重数为1。
现代控制理论习题及答案
现代控制理论习题及答案现代控制理论习题及答案现代控制理论是控制工程领域的重要分支,它研究如何设计和分析控制系统,以实现对动态系统的稳定性、响应速度、精度等方面的要求。
在学习现代控制理论过程中,习题是一个非常重要的环节,通过解答习题可以帮助我们巩固理论知识,提高问题解决能力。
本文将介绍一些常见的现代控制理论习题及其答案,希望对读者有所帮助。
1. 题目:给定一个开环传递函数 G(s) = 10/(s+5),求其闭环传递函数 T(s) 和稳定性判断。
解答:闭环传递函数 T(s) 可以通过公式 T(s) = G(s) / (1 + G(s)) 计算得到。
代入G(s) 的表达式,得到 T(s) = 10/(s+15)。
稳定性判断可以通过判断开环传递函数G(s) 的极点是否在左半平面来进行。
由于 G(s) 的极点为 -5,位于左半平面,因此系统是稳定的。
2. 题目:给定一个系统的状态空间表达式为 dx/dt = Ax + Bu,其中 A = [[-1, 2], [0, -3]],B = [[1], [1]],求系统的传递函数表达式。
解答:系统的传递函数表达式可以通过状态空间表达式进行求解。
首先,计算系统的特征值,即矩阵 A 的特征值。
通过求解 det(sI - A) = 0,可以得到系统的特征值为 -1 和 -3。
然后,将特征值代入传递函数表达式的分母,得到传递函数的分母为 (s+1)(s+3)。
接下来,计算传递函数的分子,可以通过求解 C = D(sI - A)^(-1)B 得到,其中 C 和 D 分别为输出矩阵和输入矩阵。
代入给定的 A、B 矩阵,计算得到 C = [1, 0] 和 D = [0]。
因此,系统的传递函数表达式为 G(s) = C(sI - A)^(-1)B = [1, 0] * [(s+1)^(-1), -2(s+3)^(-1); 0, (s+3)^(-1)] * [1; 1] =(s+1)^(-1) + 2(s+3)^(-1)。
现代控制理论基础第二章习题答案
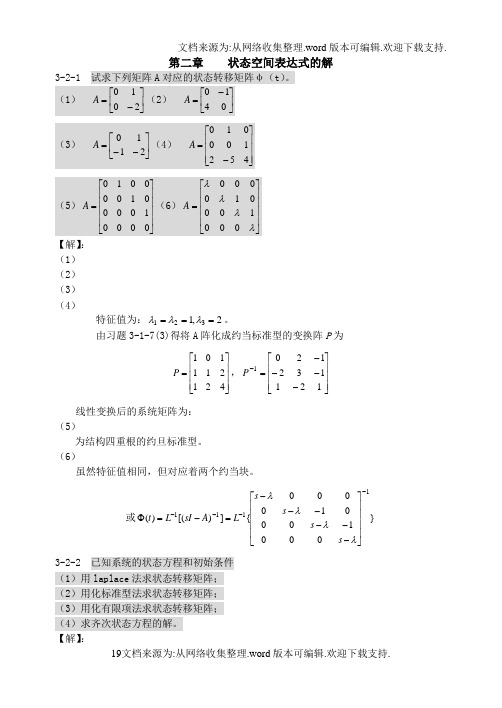
第二章 状态空间表达式的解3-2-1 试求下列矩阵A 对应的状态转移矩阵φ(t )。
(1) ⎥⎦⎤⎢⎣⎡-=2010A (2) ⎥⎦⎤⎢⎣⎡-=0410A (3) ⎥⎦⎤⎢⎣⎡--=2110A (4) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=452100010A (5)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=0000100001000010A (6)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=λλλλ000100010000A 【解】:(1) (2) (3) (4)特征值为:2,1321===λλλ。
由习题3-1-7(3)得将A 阵化成约当标准型的变换阵P 为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=421211101P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=-1211321201P线性变换后的系统矩阵为:(5)为结构四重根的约旦标准型。
(6)虽然特征值相同,但对应着两个约当块。
或}0100010000{])[()(1111----⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------=-=Φλλλλs s s s L A sI L t 3-2-2 已知系统的状态方程和初始条件 (1)用laplace 法求状态转移矩阵; (2)用化标准型法求状态转移矩阵; (3)用化有限项法求状态转移矩阵; (4)求齐次状态方程的解。
【解】:(1) (2)特征方程为: 特征值为:2,1321===λλλ。
由于112==n n ,所以1λ对应的广义特征向量的阶数为1。
求满足0)(11=-P A I λ的解1P ,得:0110000000312111=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--P P P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0011P 再根据0)(22=-P A I λ,且保证1P 、2P 线性无关,解得:对于当23=λ的特征向量,由0)(33=-P A I λ容易求得: 所以变换阵为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-==110010001321P P P P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=-1100100011P 线性变换后的系统矩阵为:(3)特征值为:2,1321===λλλ。
现代控制理论第一章答案
a0 3 a1 7 a2 5 b0 2 b1 1 b2 0 b3 0
标准型实现
1 0 0 0 x 0 u 0 x 0 1 3 7 5 1
y (b0 a 0 b3 ) (b1 a1b3 ) (b2 a 2 b3 )x 2 1 0x
1 0 0 0 x 0 0 1 x 0 u 3 7 5 1
y (b0 a 0 b3 ) (b1 a1b3 ) (b2 a 2 b3 )x 2 3 1x
【习题1-6】已知系统传递函数
10( s 1) (1) W ( s ) s ( s 1)(s 3) 6( s 1) (2) W ( s ) s ( s 2)(s 3) 2
x1
0 0 0 x 0 K1 Kp 0
1
0 Kb 0 J2 Kp 0 J1 0 K1 0 0 0 Kn
0 0 1 J1 0 0 0
0 0 Kp J1 K1 K1 Kp 0
0 0 0 0 1 0 J1 x 0 0 K1 Kp 0 0 0
y 0 0 1x
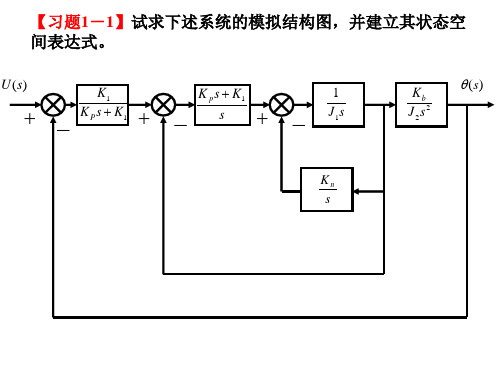
【解】(1)画模拟结构图的步骤 第一步:画出三个积分器 第二步:画出各增益系数和信号综合点 第三步:根据各变量的相互关系用信号线连接起来 (2)求系统的传递函数矩阵
Y ( s) 2s 2 7 s 3 1 W ( s) c( sI A) b U ( s) ( s 1)(s 2)(s 3) 2s 1 ( s 1)(s 2)
1 0
4 3
【习题1-10】已知两个子系统的传递函数分别为:
《现代控制理论》课后习题答案
=
3 2
, c2
=
2s + 5 lim s→−3 s + 1
=
1 2
。
从输入通道直接到输出通道上的放大系数 d = 1,由此可得:
⎡ x1
⎢ ⎣
x 2
⎤ ⎥ ⎦
=
⎡− 1
⎢ ⎣
0
0⎤ − 3⎥⎦
⎡ ⎢ ⎣
x1 x2
⎤ ⎥ ⎦
+
⎡1⎤ ⎢⎣1⎥⎦u
y
=
⎡ ⎢⎣
3 2
1 2
⎤ ⎥⎦
⎡ ⎢ ⎣
x1 x2
u
d
d
b2
dt
dt
d
b1
m
dt
b0
因此,两个环节调换后的系统状态变量图为
u
d
d
b2
dt
dt
d
b1
dt
b0
m
−∫
−∫
y −∫
a0
a1
a2
进一步简化,可得系统状态变量图为 u
b0
b1
b2
− ∫ x1
− ∫ x2
− ∫ x3 y
a0
a1
a2
3
取 y = x3 , y = x2 , y = x1 ,可以得到两个环节调换后的系统的状态空间模型为
a(s)
1 a(s)
=
s3
+
1 a2s2 +
a1s
+
a0
, b(s)
=
b2 s 2
+ b1s
+ b0
。
2
由于 s−3 y 相当于对 y 作 3 次积分,故 y = 1 可用如下的状态变量图表示: m a(s)
现代控制理论习题集及解答(后两部分)
2
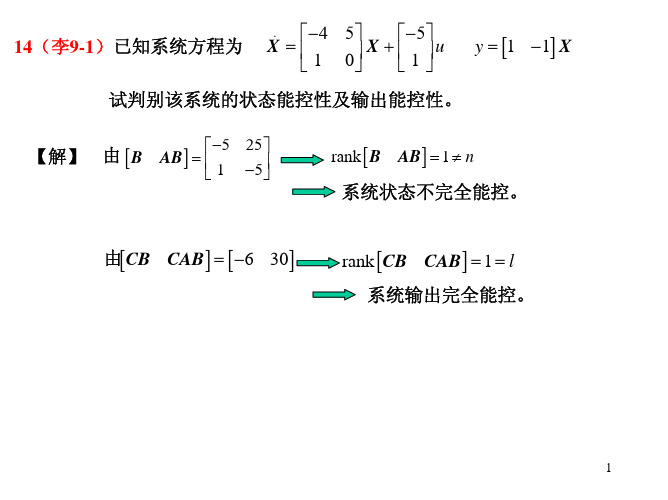
16(北航2002) 已知两个系统S1和S2的状态方程及输出方程分别为:
S1 :
X1
=
⎡0 ⎢⎣−3
1⎤ −4⎥⎦
X1
+
⎡0⎤ ⎢⎣1⎥⎦
u1
y1 = [1
−1] X 1
S2 : x2 = −2x2 + u2 y2 = x2 若两个系统按串联方式连接: u1 S1 y1, u2 S2 y2
(1)求串联系统S的状态方程及输出方程;
+
⎡0⎤ ⎢⎣1⎥⎦
u1
,
y1 = [1
−1] X1
显然状态完全能控(思考为什么?)
∵
⎡C ⎤ ⎢⎣CA⎥⎦
=
⎡2 ⎢⎣−3
1⎤ −2⎥⎦
满秩,故状态完全能观测。
系统S2 : x2 = −2x2 + u2 , y2 = x2
状态完全能控且状态完全能观测。
⎡0 1 −4⎤
系统S : ∵ ⎡⎣B
AB
A2B⎤⎦ = ⎢⎢1
⎢⎣ 1 0 −1⎥⎦ ⎢⎣1⎥⎦
y = [1 1 0]x
⎡c⎤
⎡1 1 0⎤
解:
rank
⎢ ⎢
cA
⎥ ⎥
=
rank
⎢⎢−1
−3
−1⎥⎥ = 3 = n
⎢⎣cA2 ⎥⎦
⎢⎣ 0 5 0 ⎥⎦
⎡2 0 0⎤ (2)x = ⎢⎢0 2 0⎥⎥ x,
⎢⎣0 3 1⎥⎦
y = [1 1 1]x
⎡c⎤
⎡1 1 1⎤
可绘出状态变量图:
y1 = [1
−1] X 1
由图可得,
⎡ 0 1 0 ⎤ ⎡0⎤
Z = ⎢⎢−3 −4
现代控制理论习题解答(前五章)
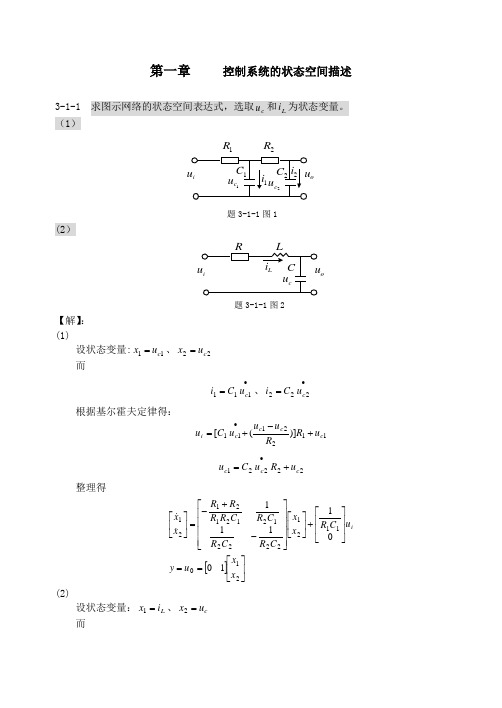
第一章 控制系统的状态空间描述3-1-1 求图示网络的状态空间表达式,选取c u 和L i 为状态变量。
(1)1R 2Ro题3-1-1图1(2)o题3-1-1图2【解】: (1)设状态变量:11c u x =、22c u x =而•=111c u C i 、•=222c u C i根据基尔霍夫定律得:1122111)]([c c c c i u R R u u u C u +-+=•22221c c c u R u C u +=•整理得[]⎥⎦⎤⎢⎣⎡==⎥⎥⎦⎤⎢⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-+-=⎥⎦⎤⎢⎣⎡210112122221212121211001111x x u y u C R x x C R C R C R C R R R R x x i(2)设状态变量:L i x =1、c u x =2 而•=c L u C i根据基尔霍夫定律得:c L L i u i L i R u ++⋅=•整理得[]⎥⎦⎤⎢⎣⎡==⎥⎥⎦⎤⎢⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎦⎤⎢⎣⎡21021211001011x x u y u L x x CL L R x x i【解】:此题多解,一般可以写成能控标准型、能观标准型或对角标准型,以下解法供参考。
(1)[]xy u x x 1111006116100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=结构图如图题3-1-5图1所示题3-1-5图1(2)655216552656513)(22222+++-=++--++=++++=s s s s s s s s s s s s s G uy u x x +--=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=]25[105610 结构图如图题3-1-5图2(a )所示题3-1-5图2(a)或有312116513)(22+-+-=++++=s s s s s s s G []ux y u x x +--=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=11113002 结构图如图题3-1-5图2(b )所示y题3-1-5图2(b)(3))3()1(4)(2++=s s s s G)1(1)1(2)3(3134)(2+-++-++-+=s s s s s G xy u x x⎥⎦⎤⎢⎣⎡---=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---=12313410111000110000300000 结构图如图题3-1-5图3所示题3-1-5图3(4)13332)(232+++++=s s s s s s G []xy u x x 123100331100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=结构图如图题3-1-5图4所示y题3-1-5图43-1-6 将下列状态方程化成对角标准型。
现代控制理论习题解答(第四章)

第四章 控制系统的稳定性3-4-1 试确定下列二次型是否正定。
(1)3123212322212624)(x x x x x x x x x x v --+++= (2)232123222126410)(x x x x x x x x v ++---= (3)312321232221422410)(x x x x x x x x x x v --+++= 【解】: (1)04131341111,034111,01,131341111<-=---->=>⇒⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=P 二次型函数不定。
(2)034101103031,0110331,01,4101103031<-=--->=--<-⇒⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=P 二次型函数为负定。
(3)017112141211003941110,010,1121412110>=---->=>⇒⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=P 二次型函数正定。
3-4-2 试确定下列二次型为正定时,待定常数的取值范围。
312321231221211242)(x x x x x x x c x b x a x v --+++=【解】:312321231221211242)(x x x x x x x c x b x a x v --+++=x c b a x T⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=1112121110212111,011,0111111>---->>c b a b a a 满足正定的条件为:⎪⎩⎪⎨⎧++>+>>1111111114410ca b c b a b a a3-4-3 试用李亚普诺夫第二法判断下列线性系统的稳定性。
;1001)4(;1111)3(;3211)2(;1110)1(x x x x x x x x ⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡---=⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡--=【解】: (1)设22215.05.0)(x x x v +=⎩⎨⎧≠≤==-=--=+=)0(0)0(0222221212211)(x x x x x x x x x x x x x v为半负定。
现代控制理论课后题答案(第二章-第六章)
1
R R2C1 1 1 1 1 x1 x2 u1 x R1 R2C1 R2C1 R2C1 1 1 1 2 x1 x2 u1 x R2C2 R2C2 R2C2 y u2 u1 x1
即:
R1 R2C1 1 R1 R2C1 x x 2 1 R2C2
x2
u
R1
R3
y
R2
图 P2.8 RL 电网络
解 采用机理分析法求状态空间表达式。由电路原理可得到如下微分方程
2 x1 x2 R3 R2 x2 L2 x
1 x1 x2 R3 u x1 L1 x / R1
y x1 x2 R3
(2) 解 采用拉氏变换法求取状态空间表达式。对微分方程 (2)在零初试条件 下取拉氏变换得:
2s 3Y ( s ) 3sY ( s ) s 2U ( s ) U ( s ) 1 2 1 s Y (s) s 1 2 2 U ( s ) 2s 3 3s s 3 3 s 2
dy1 dy , x4 2 。 dt dt
3 Kx1 B1 M1 x
2
d ( x2 x1 ) dt
对 M 2 有:
4 f (t ) B M2x
经整理得:
1
d ( x2 x 1) dx B 2 dt dt
2
状态方程为:
1 x3 x x 2 x4 B B K 3 x1 1 x3 1 x4 x M1 M1 M1 B B B 1 4 1 x3 ( 1 2 ) x4 u x M2 M2 M2 M2
1 1 R2C1 x1 R2C1 u1 x2 1 1 R C R2C2 2 2
《现代控制理论》课后习题答案1
G ( s) =
每一个环节的状态空间模型分别为:
1 2s + 5 ⋅ s+3 s+5
2 = −5 x 2 + u1 ⎧x ⎩ y = −5 x 2 + 2u1
1 = −3x1 + u ⎧x ⎨ ⎩ y1 = x1
又因为 y1 = u1 , 所以
和 ⎨
1 = −3 x1 + u ⎧x ⎨ 2 = x1 − 5 x 2 ⎩x y = 2 x1 − 5 x 2
由此得到的 d 就是状态空间实现中的直接转移项 D 。 1.6 在例 1.2.2 处理一般传递函数的状态空间实现过程中,采用了如图 1.12 的串联分解, 试问:若将图 1.12 中的两个环节前后调换,则对结果有何影响? 答: 将图 1.12 中的两个环节调换后 y a(s)
5
1.10
已知单输入单输出时不变系统的微分方程为:
(t ) + 3 y (t ) = u ( t ) + 6u ( t ) + 8u ( t ) y (t ) + 4 y
试求:(1)建立此系统状态空间模型的对角线标准形; (2)根据所建立的对角线标准形求系统的传递函数。 答: (1)由微分方程可得:
s 2 + 6s + 8 2s + 5 G(s) = 2 = 1+ 2 s + 4s + 3 s + 4s + 3
记
G 1 (s) =
其中,
c c 2s + 5 2s + 5 = = 1 + 2 , s + 4 s + 3 ( s + 1)( s + 3) s + 1 s + 3
现代控制理论课后习题及答案
《现代控制理论》课后习题及答案第一章控制系统的状态空间表达式1-1.试求图1-1系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图图1-1 系统结构方块图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图图1-2 双输入—双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••6543211654321111111126543210000010000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp n p b1-2.有电路如图1-3所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图图1-3 电路图解:由图,令32211,,x u x i x i c===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
(完整word版)现代控制理论习题解答

(完整word版)现代控制理论习题解答《现代控制理论》第1章习题解答1.1 线性定常系统和线性时变系统的区别何在?答:线性系统的状态空间模型为:xAx Bu y Cx Du=+=+&线性定常系统和线性时变系统的区别在于:对于线性定常系统,上述状态空间模型中的系数矩阵A ,B ,C 和D 中的各分量均为常数,⽽对线性时变系统,其系数矩阵A ,B ,C 和D 中有时变的元素。
线性定常系统在物理上代表结构和参数都不随时间变化的⼀类系统,⽽线性时变系统的参数则随时间的变化⽽变化。
1.2 现代控制理论中的状态空间模型与经典控制理论中的传递函数有什么区别?答: 传递函数模型与状态空间模型的主要区别如下:1.3 线性系统的状态空间模型有哪⼏种标准形式?它们分别具有什么特点?答: 线性系统的状态空间模型标准形式有能控标准型、能观标准型和对⾓线标准型。
对于n 阶传递函数1212101110()n n n n n n n b s b s b s b G s d s a s a s a ------++++=+++++L L ,分别有⑴能控标准型: []012101210100000100000101n n n xx u a a a a y b b b b x du---=+??----????=+LL &M M M O M M L LLb a b y xdu ---?--=-+?????-????=+??L L &%%L M M M M M M L %L ⑶对⾓线标准型: []1212001001001n n p p x x u p y c c c x du=+??????=+?L L &M M O M M L L 式中的12,,,n p p p L 和12,,,n c c c L 可由下式给出,12121012111012()n n n n n n n n nb s b s b s bc c c G sd d s a s a s a s p s p s p ------++++=+=++++++++---L L L 能控标准型的特点:状态矩阵的最后⼀⾏由传递函数的分母多项式系数确定,其余部分具有特定结构,输出矩阵依赖于分⼦多项式系数,输⼊矩阵中的元素除了最后⼀个元素是1外,其余全为0。