18B20,12864C51程序
我的51单片机之 温度传感器18B20 的C语言和汇编编程
{
TCZ=TCZ%100;//只显示小于 100 的整数温度
}
TC[1]=TCZ/10;
TC[0]=TCZ%10;
}
Hale Waihona Puke }void main() {
LEDCODE=0xFF; LED1=0; while(1) {
ReadTemp(); Disp(); } }
四、汇编程序: ;********************************************************************
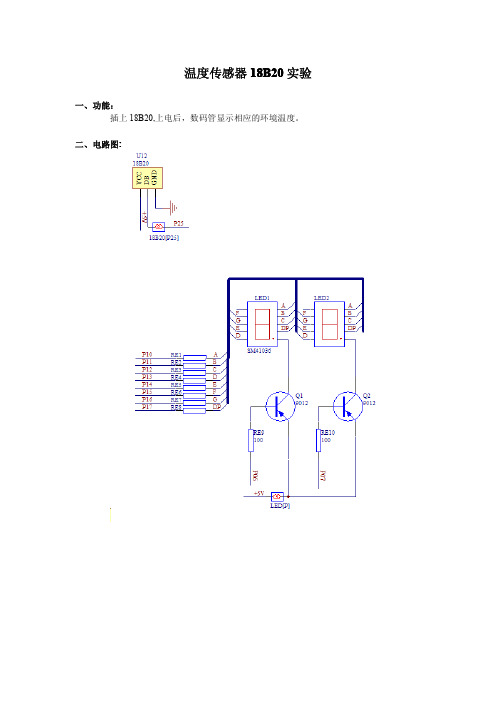
温度传感器 18B20 实验
一、功能: 插上 18B20,上电后,数码管显示相应的环境温度。
二、电路图:
三、C 程序: //******************************************************************** //读取 18B20 输出的温度数据(2 位)并在数码管上显示;made by luqichao //********************************************************************
unsigned char Reset(); unsigned char ReadByte(); void WriteByte(unsigned char Data); void ReadTemp(); //延时 void delay(unsigned char n) {
unsigned char i; for(i=0;i<n;i++) { } }
Data>>=1; CLK=0; NOP();NOP();NOP();NOP();NOP();NOP();//6us CLK=1; NOP();NOP();NOP();NOP();NOP();//4us Temp=CLK; if(Temp) {
51单片机经典C程序(12864)
/*************************************** 控制器:KS0108* MCU:AT89C5* ,晶体频率:12MHz* 取模方式:纵向字节倒序* CS1和CS2为低电平有效**************************************/#include <reg52.h>#define uchar unsigned char#define uint unsigned int#define LCD_PORT P0#define Left 1#define Right 2sbit LCD_Busy=P0^7;sbit LCD_EN = P1^2;sbit LCD_RS = P1^0;sbit LCD_RW = P1^1;sbit LCD_RST= P1^7;sbit LCD_CS2= P3^6;sbit LCD_CS1= P3^5;uchar DisBuf[32],Page_Num,Clm_Num;code char Table0[]={/*-- 文字: A --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=8x16 --*/0x00,0x00,0xC0,0x38,0xE0,0x00,0x00,0x00,0x20,0x3C,0x23,0x02,0x02,0x27 ,0x38,0x20,/*-- 文字: B --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=8x16 --*/0x08,0xF8,0x88,0x88,0x88,0x70,0x00,0x00,0x20,0x3F,0x20,0x20,0x20,0x11 ,0x0E,0x00,/*-- 文字: C --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=8x16 --*/0xC0,0x30,0x08,0x08,0x08,0x08,0x38,0x00,0x07,0x18,0x20,0x20,0x20,0x10 ,0x08,0x00,/*-- 文字: D --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=8x16 --*/0x08,0xF8,0x08,0x08,0x08,0x10,0xE0,0x00,0x20,0x3F,0x20,0x20,0x20,0x10 ,0x0F,0x00,/*-- 文字: E --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=8x16 --*/0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x20,0x23,0x20 ,0x18,0x00,/*-- 文字: F --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=8x16 --*/0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x00,0x03,0x00 ,0x00,0x00,/*-- 文字: G --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=8x16 --*/0xC0,0x30,0x08,0x08,0x08,0x38,0x00,0x00,0x07,0x18,0x20,0x20,0x22,0x1E ,0x02,0x00,};code unsigned char Table3[]={/*-- 文字: 天 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x00,0x40,0x42,0x42,0x42,0x42,0x42,0xFE,0x42,0x42,0x42,0x42,0x42,0x42 ,0x40,0x00,0x00,0x80,0x40,0x20,0x10,0x08,0x06,0x01,0x02,0x04,0x08,0x10,0x30,0x60 ,0x20,0x00,/*-- 文字: 仙 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x00,0x80,0x60,0xF8,0x07,0x02,0xE0,0x00,0x00,0x00,0xFF,0x00,0x00,0x00 ,0xE0,0x00,0x01,0x00,0x00,0x7F,0x00,0x20,0x7F,0x20,0x20,0x20,0x3F,0x20,0x20,0x20 ,0x7F,0x00,/*-- 文字: 妹 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x08,0x88,0x7F,0x0A,0x08,0xF8,0x80,0x88,0x88,0x88,0xFF,0x88,0x88,0x88 ,0x80,0x00,0x40,0x21,0x12,0x0C,0x3A,0x11,0x40,0x30,0x0C,0x03,0xFF,0x06,0x08,0x30 ,0x10,0x00,/*-- 文字: 妹 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x08,0x88,0x7F,0x0A,0x08,0xF8,0x80,0x88,0x88,0x88,0xFF,0x88,0x88,0x88 ,0x80,0x00,0x40,0x21,0x12,0x0C,0x3A,0x11,0x40,0x30,0x0C,0x03,0xFF,0x06,0x08,0x30 ,0x10,0x00};code unsigned char Table4[]={/*-- 文字: 我 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x20,0x20,0x22,0x22,0xFE,0x21,0x21,0x20,0x20,0xFF,0x20,0x22,0xAC,0x20 ,0x20,0x00,0x04,0x04,0x42,0x82,0x7F,0x01,0x01,0x10,0x10,0x08,0x07,0x1A,0x21,0x40 ,0xF0,0x00,/*-- 文字: 好 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x10,0x10,0xF0,0x1F,0x10,0xF0,0x80,0x82,0x82,0x82,0xF2,0x8A,0x86,0x82 ,0x80,0x00,0x80,0x43,0x22,0x14,0x0C,0x73,0x20,0x00,0x40,0x80,0x7F,0x00,0x00,0x00 ,0x00,0x00,/*-- 文字: 想 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x08,0xC8,0x38,0xFF,0x18,0x68,0x08,0x00,0xFE,0x2A,0x2A,0x2A,0x2A,0xFE ,0x00,0x00,0x01,0x40,0x70,0x01,0x38,0x40,0x40,0x44,0x59,0x41,0x41,0x61,0x01,0x09 ,0x30,0x00,/*-- 文字: 你 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x80,0x40,0xF0,0x2C,0x43,0x20,0x98,0x0F,0x0A,0xE8,0x08,0x88,0x28,0x1C ,0x08,0x00,0x00,0x00,0x7F,0x00,0x10,0x0C,0x03,0x21,0x40,0x3F,0x00,0x00,0x03,0x1C ,0x08,0x00};code unsigned char Table5[]={/*-- 调入了一幅图像:C:\Documents and Settings\sammy\桌面\小新.bmp --*//*-- 宽度x高度=64x64 --*/0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0xE0,0xF0 ,0xF8,0x7C,0x3C,0x1E,0x1E,0x8F,0xCF,0xCF,0xCF,0xDF,0x9F,0x9F,0x1F,0x1F,0x3F,0x3E ,0x3E,0x3E,0x7C,0x7C,0x7C,0xF8,0xF8,0xF0,0xE0,0xC0,0x80,0x00,0x00,0x00,0x00,0x00 ,0x00,0x00,0x00,0x00,0x00,0x80,0x80,0x00,0x80,0x80,0x00,0x00,0x00,0x00,0x00,0x00 ,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xC0,0x20,0x10,0x08,0x08,0x1E,0x3F,0x7F,0x03 ,0x00,0x00,0x00,0x06,0x07,0x07,0x03,0x03,0x03,0x0F,0x3F,0x3F,0x7E,0x78,0x78,0x30 ,0x00,0x00,0x00,0x00,0x60,0xE0,0xF0,0x78,0x39,0x39,0x73,0xFE,0x60,0x00,0x00,0x00 ,0x00,0x00,0x00,0x00,0x03,0x04,0x08,0x11,0x08,0x04,0x83,0x80,0x0C,0x92,0xA2,0x44 ,0x22,0x12,0x00,0x00,0x00,0x00,0x00,0x0F,0x30,0x40,0x80,0x80,0x80,0x00,0x00,0x00 ,0x00,0x00,0x00,0x00,0x02,0x02,0x04,0x04,0x04,0x08,0x08,0x08,0x08,0x10,0x10,0x00 ,0x00,0x00,0x00,0x40,0x40,0x80,0x80,0x80,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,0x00 ,0x00,0x60,0x90,0x10,0x20,0x10,0x90,0x60,0x00,0x03,0x04,0x08,0x11,0x08,0x04,0x03 ,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x03,0x0C,0x10 ,0xE0,0xC0,0x80,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00 ,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x01,0x00,0x01,0x06,0xF8,0x00,0x00 ,0x00,0x00,0x00,0x01,0x02,0x01,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00 ,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x1F ,0x7F,0xFF,0xF3,0xF3,0xFE,0xFC,0xFC,0xF8,0xF8,0xF0,0xF0,0xF0,0xE0,0xE0,0xE0,0xE0 ,0xE0,0xE0,0xE4,0xE0,0xE0,0xE0,0x10,0x10,0x10,0x08,0x08,0x04,0x02,0x01,0x00,0x00 ,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00 ,0x00,0x00,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,0xD8,0xD8,0xFC ,0xFC,0xFC,0xFD,0xFD,0xFF,0xF7,0xF7,0xF7,0xF7,0xFF,0xFF,0xFF,0xFF,0xF3,0xF7,0xF7 ,0xFF,0xFF,0xFF,0xFD,0xFD,0xFC,0xDC,0xD8,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0 ,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0,0xC0 ,0xC0,0xC0,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF ,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF ,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF ,0xFF,0xFF,0xFF,0xFF,0xFF,0x7F,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF ,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF ,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF ,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF ,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF ,0xFF,0xFF};code uchar Table8[]={/*-- 文字: 相 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x10,0x10,0xD0,0xFF,0x30,0x50,0x90,0x00,0xFE,0x22,0x22,0x22,0x22,0xFE ,0x00,0x00,0x04,0x03,0x00,0xFF,0x00,0x00,0x01,0x00,0xFF,0x42,0x42,0x42,0x42,0xFF ,0x00,0x00,/*-- 文字: 约 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x40,0x60,0x58,0xC7,0x60,0x18,0x40,0x20,0x58,0x8F,0x08,0x08,0x08,0xF8 ,0x00,0x00,0x10,0x32,0x13,0x12,0x0A,0x0A,0x08,0x00,0x00,0x00,0x43,0x80,0x40,0x3F ,0x00,0x00,/*-- 文字: 丛 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x00,0x00,0x00,0x00,0xFE,0x00,0x00,0x00,0x00,0xFE,0x80,0x00,0x00,0x00 ,0x00,0x00,0x20,0x30,0x2C,0x23,0x20,0x21,0x36,0x2C,0x23,0x20,0x20,0x23,0x26,0x3C ,0x28,0x00,/*-- 文字: 林 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x10,0x10,0x90,0xFF,0x90,0x10,0x00,0x10,0x10,0xD0,0xFF,0x90,0x10,0x10 ,0x10,0x00,0x08,0x06,0x01,0xFF,0x00,0x13,0x08,0x04,0x03,0x00,0xFF,0x01,0x06,0x18 ,0x08,0x00};code uchar Table9[]={/*-- 文字: 浪 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x08,0x30,0x01,0xC6,0x30,0x00,0xFC,0x94,0x95,0x96,0x94,0x94,0xFC,0x00 ,0x00,0x00,0x04,0x04,0xFE,0x01,0x00,0x00,0xFF,0x40,0x21,0x06,0x08,0x34,0x62,0xC2 ,0x40,0x00,/*-- 文字: 漫 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x10,0x20,0x81,0x66,0x00,0xC0,0x5F,0xD5,0x55,0x55,0xD5,0x55,0x5F,0xC0 ,0x00,0x00,0x04,0xFC,0x03,0x00,0x00,0x81,0x85,0x4D,0x55,0x25,0x35,0x4D,0xC5,0x41 ,0x00,0x00,/*-- 文字: 野 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x00,0x7E,0x4A,0xFE,0x4A,0x4A,0x7E,0x00,0x42,0x52,0xD2,0x6A,0x46,0xC2 ,0x40,0x00,0x22,0x22,0x22,0x1F,0x12,0x12,0x12,0x00,0x40,0x80,0x7F,0x00,0x00,0x00 ,0x00,0x00,/*-- 文字: 岭 --*//*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/0x00,0xF0,0x00,0xFF,0x00,0xF0,0x40,0x20,0x10,0x2C,0x43,0x04,0x08,0x70 ,0x20,0x00,0x08,0x1F,0x08,0x07,0x04,0x07,0x01,0x05,0x09,0x11,0x29,0x65,0x03,0x01 ,0x00,0x00};void Delay_us(unsigned int DelayTime){while(DelayTime) DelayTime--;}void Delay_x10ms(unsigned char DelayTime) //***************10ms延时**********//{unsigned char i,j,k;for(i=0;i<DelayTime;i++)for(j=0;j<10;j++)for(k=0;k<120;k++) {;}}/*----------------------------------------------------------------------------下面这个函数用于液晶模块的忙信号检测。
DS18B20数字温度计使用与C51程序
1.DS18B20基本知识DS18B20数字温度计是DALLAS公司生产的1-Wire,即单总线器件,具有线路简单,体积小的特点。
因此用它来组成一个测温系统,具有线路简单,在一根通信线,可以挂很多这样的数字温度计,十分方便。
1、DS18B20产品的特点(1)、只要求一个端口即可实现通信。
(2)、在DS18B20中的每个器件上都有独一无二的序列号。
(3)、实际应用中不需要外部任何元器件即可实现测温。
(4)、测量温度范围在-55。
C到+125。
C之间。
(5)、数字温度计的分辨率用户可以从9位到12位选择。
(6)、内部有温度上、下限告警设置。
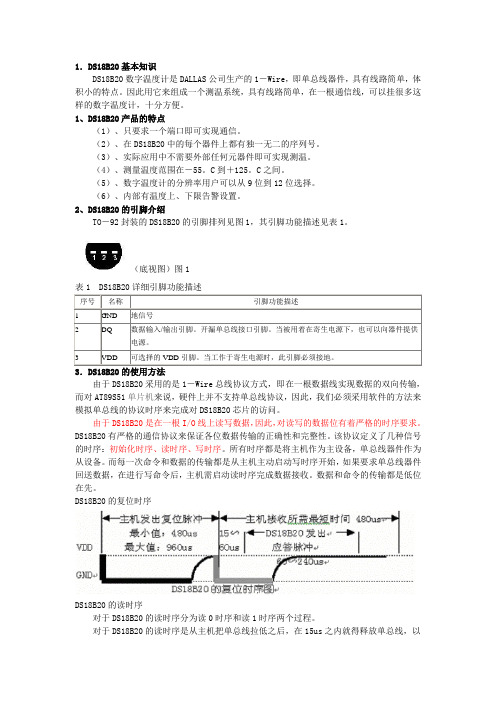
2、DS18B20的引脚介绍TO-92封装的DS18B20的引脚排列见图1,其引脚功能描述见表1。
(底视图)图1表1 DS18B20详细引脚功能描述3.DS18B20的使用方法由于DS18B20采用的是1-Wire总线协议方式,即在一根数据线实现数据的双向传输,而对AT89S51单片机来说,硬件上并不支持单总线协议,因此,我们必须采用软件的方法来模拟单总线的协议时序来完成对DS18B20芯片的访问。
由于DS18B20是在一根I/O线上读写数据,因此,对读写的数据位有着严格的时序要求。
DS18B20有严格的通信协议来保证各位数据传输的正确性和完整性。
该协议定义了几种信号的时序:初始化时序、读时序、写时序。
所有时序都是将主机作为主设备,单总线器件作为从设备。
而每一次命令和数据的传输都是从主机主动启动写时序开始,如果要求单总线器件回送数据,在进行写命令后,主机需启动读时序完成数据接收。
数据和命令的传输都是低位在先。
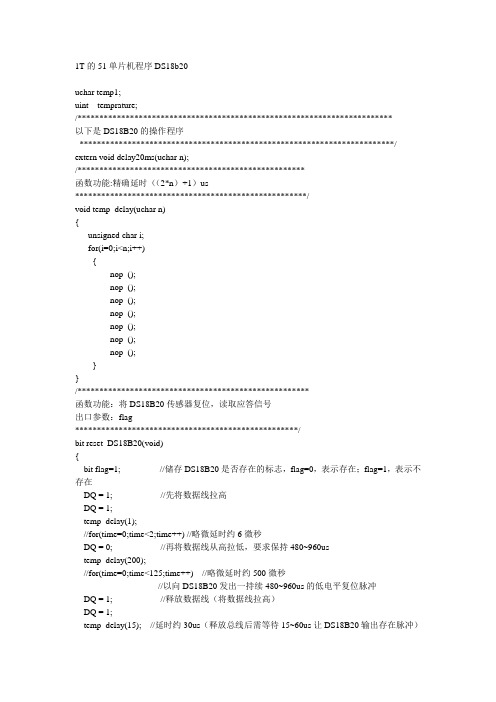
DS18B20的复位时序DS18B20的读时序对于DS18B20的读时序分为读0时序和读1时序两个过程。
对于DS18B20的读时序是从主机把单总线拉低之后,在15us之内就得释放单总线,以让DS18B20把数据传输到单总线上。
DS18B20在完成一个读时序过程,至少需要60us才能完成。
12864 18b20好使的C程序

void LCDSendWord(unsigned char *p) //向LCD发送一个字符串,
{
while(*p>0) //比如void LCDSendWord('你好');就是让LCD显示"你好"
{
WriteDataLCD(*p);
uchar TX=0; //转换后的温度值小数部分 //DS18B20的数据线
void delay(uint x);
void reset (void);
void write(uchar val);
uchar read(void);
Delay(5);
}
/******************给LCD写入指令**********************/
void WriteCommandLCD(unsigned char WCLCD) //BuysC为0时忽略忙检测
{
CheckBusy(); //检测忙
void LCDTestWord(bit i,unsigned char word);
void Delay(unsigned char num);
/**********定义温度传感器DS18B20的数据线和相关函数*************/
sbit DQ=P2^7;
char TZ=0; //转换后的温度值整数部分
val=val>>1;
}
}
uchar read(void) //18b20读字节
{
uchar i,d=0;
uchar value=0; //读t;0;i--)
C51-1T单片机的18b20程序
1T的51单片机程序DS18b20uchar temp1;uint temprature;/************************************************************************以下是DS18B20的操作程序************************************************************************/ extern void delay20ms(uchar n);/****************************************************函数功能:精确延时((2*n)+1)us*****************************************************/void temp_delay(uchar n){unsigned char i;for(i=0;i<n;i++){_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();}}/*****************************************************函数功能:将DS18B20传感器复位,读取应答信号出口参数:flag***************************************************/bit reset_DS18B20(void){bit flag=1; //储存DS18B20是否存在的标志,flag=0,表示存在;flag=1,表示不存在DQ = 1; //先将数据线拉高DQ = 1;temp_delay(1);//for(time=0;time<2;time++) //略微延时约6微秒DQ = 0; //再将数据线从高拉低,要求保持480~960ustemp_delay(200);//for(time=0;time<125;time++) //略微延时约500微秒//以向DS18B20发出一持续480~960us的低电平复位脉冲DQ = 1; //释放数据线(将数据线拉高)DQ = 1;temp_delay(15); //延时约30us(释放总线后需等待15~60us让DS18B20输出存在脉冲)//for(time=0;time<7;time++)flag=DQ; //让单片机检测是否输出了存在脉冲(DQ=0表示存在)flag=DQ;temp_delay(150);//for(time=0;time<200;time++); //延时足够长时间,等待存在脉冲输出完毕return (flag); //返回检测成功标志}/*****************************************************函数功能:从DS18B20读取一个字节数据出口参数:dat***************************************************/uchar ReadOneChar(void){unsigned char i=0,j;unsigned char dat=0; //储存读出的一个字节数据for (i=0;i<8;i++){DQ = 0; //单片机从DS18B20读书据时,将数据线从高拉低即启动读时序dat>>=1;temp_delay(1); //等待一个机器周期DQ = 1; //将数据线"人为"拉高,为单片机检测DS18B20的输出电平作准备temp_delay(5); //for(time=0;time<2;time++) //延时约6us,使主机在15us 内采样j=DQ;j=DQ;if(j==1)dat|=0x80; //如果读到的数据是1,则将1存入datelsedat|=0x00; //如果读到的数据是0,则将0存入dat//temp_delay(1);DQ=1;temp_delay(20);//for(time=0;time<8;time++)//延时3us,两个读时序之间必须有大于1us的恢复期}return(dat); //返回读出的十进制数据}/*****************************************************函数功能:向DS18B20写入一个字节数据入口参数:dat***************************************************/WriteOneChar(unsigned char dat){unsigned char i=0;DQ=1;for (i=0; i<8; i++){DQ=0; //将数据线从高拉低时即启动写时序temp_delay(1);DQ=dat&0x01; //利用与运算取出要写的某位二进制数据,//并将其送到数据线上等待DS18B20采样temp_delay(25);//for(time=0;time<10;time++);//延时约30us,DS18B20在拉低后的约15~60us期间从数据线上采样DQ=1; //释放数据线//temp_delay(1);//for(time=0;time<1;time++);//延时3us,两个写时序间至少需要1us的恢复期dat>>=1; //将dat中的各二进制位数据右移1位_nop_();}temp_delay(4);//for(time=0;time<4;time++)//稍作延时,给硬件一点反应时间}/*****************************************************函数功能:初始化***************************************************/void ReadyReadTemp(void){reset_DS18B20(); //将DS18B20初始化WriteOneChar(0xCC); // 跳过读序号列号的操作WriteOneChar(0x44); // 启动温度转换delay20ms(5);//温度转换需要一点时间reset_DS18B20(); //将DS18B20初始化WriteOneChar(0xCC); //跳过读序号列号的操作WriteOneChar(0xBE); //读取温度寄存器,前两个分别是温度的低位和高位}//温度计算程序void temp_calculate(void){// uchar i=10;// while(Init_DS18B20()==1&&i!=0)// i--;if(reset_DS18B20()==0){uint tempL,tempH;uchar h;ReadyReadTemp(); //读温度准备tempL=ReadOneChar(); //先读的是温度值低位tempH=ReadOneChar(); //接着读的是温度值高位h=tempH&0xf0;tempH=tempH<<8;temprature=tempH+tempL;//temprature=tempH<<8+tempL; //if(h==0x00){temp1=0;}else if(h==0xf0){temprature=~temprature+1;temp1=1;}//temprature=temprature&0x0fff;temprature=temprature*0.625;}else{temprature=0;}}。
ds18b20的完整程序(c51)

基于51单片机的12864显示温度(ds18b20)

#ifndef __LCD12864_H#define __LCD12864_H//---包含头文件---//#include<reg51.h>//---重定义关键词---//#ifndef uchar#define uchar unsigned char#endif#ifndef uint#define uint unsigned int#endif//---如果使用画图模式定义这个---//#define LCD12864_PICTURE//---定义使用的IO口---//#define LCD12864_DATAPORT P1 //数据IO口sbit LCD12864_RS = P2^6; //(数据命令)寄存器选择输入sbit LCD12864_RW = P2^5; //液晶读/写控制sbit LCD12864_EN = P2^7; //液晶使能控制sbit LCD12864_PSB = P3^2; //串/并方式控制sbit LCD12864_RST = P3^4; //复位端//---声明全局函数---//void LCD12864_Delay1ms(uint c);uchar LCD12864_Busy(void);void LCD12864_WriteCmd(uchar cmd);void LCD12864_WriteData(uchar dat);void LCD12864_Init();void LCD12864_ClearScreen(void);void LCD12864_SetWindow(uchar x, uchar y);void LCD12864_DrowPic(uchar *a);void LCD12864_DrowPoint(uchar x, uchar y);#endif#ifndef __TEMP_H_#define __TEMP_H_#include<reg51.h>//---重定义关键词---//#ifndef uchar#define uchar unsigned char#endif#ifndef uint#define uint unsigned int#endif//--定义使用的IO口--//sbit DSPORT=P3^3;//--声明全局函数--//void Delay1ms(uint );uchar Ds18b20Init();void Ds18b20WriteByte(uchar com);uchar Ds18b20ReadByte();void Ds18b20ChangTemp();void Ds18b20ReadTempCom();int Ds18b20ReadTemp();#endif#include"lcd12864.h"/****************************************************************************** ** 函数名: LCD12864_Delay1ms* 函数功能: 延时1MS* 输入: c* 输出: 无******************************************************************************* /void LCD12864_Delay1ms(uint c)uchar a,b;for(; c>0; c--){for(b=199; b>0; b--){for(a=1; a>0; a--);}}}/****************************************************************************** ** 函数名: LCD12864_Busy* 函数功能: 检测LCD是否忙* 输入: 无* 输出: 1或0(1表示不忙,0表示忙)******************************************************************************* /uchar LCD12864_Busy(void){uchar i = 0;LCD12864_RS = 0; //选择命令LCD12864_RW = 1; //选择读取LCD12864_EN = 1;LCD12864_Delay1ms(1);while((LCD12864_DA TAPORT & 0x80) == 0x80) //检测读取到的值{i++;if(i > 100){LCD12864_EN = 0;return 0; //超过等待时间返回0表示失败}}LCD12864_EN = 0;return 1;}/****************************************************************************** ** 函数名: LCD12864_WriteCmd* 函数功能: 写命令* 输入: cmd* 输出: 无******************************************************************************* /void LCD12864_WriteCmd(uchar cmd){uchar i;i = 0;while( LCD12864_Busy() == 0){LCD12864_Delay1ms(1);i++;if( i>100){return; //超过等待退出}}LCD12864_RS = 0; //选择命令LCD12864_RW = 0; //选择写入LCD12864_EN = 0; //初始化使能端LCD12864_DATAPORT = cmd; //放置数据LCD12864_EN = 1; //写时序LCD12864_Delay1ms(1);LCD12864_EN = 0;}/****************************************************************************** ** 函数名: LCD12864_WriteData* 函数功能: 写数据* 输入: dat* 输出: 无******************************************************************************* /void LCD12864_WriteData(uchar dat){uchar i;i = 0;while( LCD12864_Busy() == 0){LCD12864_Delay1ms(1);i++;if( i>100){return; //超过等待退出}}LCD12864_RS = 1; //选择数据LCD12864_RW = 0; //选择写入LCD12864_EN = 0; //初始化使能端LCD12864_DATAPORT = dat; //放置数据LCD12864_EN = 1; //写时序LCD12864_Delay1ms(1);LCD12864_EN = 0;}/****************************************************************************** ** 函数名: LCD12864_ReadData* 函数功能: 读取数据* 输入: 无* 输出: 读取到的8位数据******************************************************************************* /#ifdef LCD12864_PICTUREuchar LCD12864_ReadData(void){uchar i, readValue;i = 0;while( LCD12864_Busy() == 0){LCD12864_Delay1ms(1);i++;if( i>100){return 0; //超过等待退出}}LCD12864_RS = 1; //选择命令LCD12864_RW = 1;LCD12864_EN = 0;LCD12864_Delay1ms(1); //等待LCD12864_EN = 1;LCD12864_Delay1ms(1);readValue = LCD12864_DA TAPORT;LCD12864_EN = 0;return readValue;}#endif/****************************************************************************** ** 函数名: LCD12864_Init* 函数功能: 初始化LCD12864* 输入: 无* 输出: 无******************************************************************************* /void LCD12864_Init(){LCD12864_PSB = 1; //选择并行输入LCD12864_RST = 1; //复位LCD12864_WriteCmd(0x30); //选择基本指令操作LCD12864_WriteCmd(0x0c); //显示开,关光标LCD12864_WriteCmd(0x01); //清除LCD12864的显示内容}/****************************************************************************** ** 函数名: LCD12864_ClearScreen* 函数功能: 在画图模式下,LCD12864的01H命令不能清屏,所以要自己写一* * 屏函数* 输入: 无* 输出: 无******************************************************************************* /#ifdef LCD12864_PICTUREvoid LCD12864_ClearScreen(void){uchar i,j;LCD12864_WriteCmd(0x34); //开启拓展指令集for(i=0;i<32;i++) //因为LCD有纵坐标32格所以写三十二次{LCD12864_WriteCmd(0x80+i); //先写入纵坐标Y的值LCD12864_WriteCmd(0x80); //再写入横坐标X的值for(j=0;j<32;j++) //横坐标有16位,每位写入两个字节的的数据,也{ //就写入32次以为当写入两个字节之后横坐标会自LCD12864_WriteData(0x00); //动加1,所以就不用再次写入地址了。
DS18B20多点测温(51C程序)

DS18B20多点测温由于本人在前两天找DS18B20多点测温(51 C程序),网上下载了很多,但是都不是很理想,后来,自己总结前人的知识,重新写了这个程序。
其中包括程序一:单个读序列号。
程序二,匹配并且读两个DS18B20,当然,读多个与读两个基本原理一样,只要加上其序列号等即可。
本程序所有显示都是用LCD1602显示。
程序一:度序列号,并用1602显示,1602从左到右分别是低到高位。
#include<reg51。
h>#define uchar unsigned char#define uint unsigned intsbit DQ=P3^7;//ds18b20与单片机连接口sbit RS=P3^0;sbit RW=P3^1;sbit EN=P3^2;unsigned char code str1[]={" "};unsigned char code str2[]={” ”};uchar fCode[8];uchar data disdata[5];uint tvalue;//温度值uchar tflag;//温度正负标志/*************************lcd1602程序**************************/void delay1ms(unsigned int ms)//延时1毫秒(不够精确的){unsigned int i,j;for(i=0;i<ms;i++)for(j=0;j〈100;j++);}void wr_com(unsigned char com)//写指令//{delay1ms(1);RS=0;RW=0;EN=0;P2=com;delay1ms(1);EN=1;delay1ms(1);EN=0;}void wr_dat(unsigned char dat)//写数据//{delay1ms(1);;RS=1;RW=0;EN=0;P2=dat;delay1ms(1);EN=1;delay1ms(1);EN=0;}void lcd_init()//初始化设置//{delay1ms(15);wr_com(0x38);delay1ms(5);wr_com(0x08);delay1ms(5);wr_com(0x01);delay1ms(5);wr_com(0x06);delay1ms(5);wr_com(0x0c);delay1ms(5);}void display(unsigned char *p)//显示//{while(*p!=’\0'){wr_dat(*p);p++;delay1ms(1);}}void init_play()//初始化显示{lcd_init();wr_com(0x80);display(str1);wr_com(0xc0);display(str2);}/******************************ds1820 *********************/ void delay_18B20(unsigned int i)//延时1微秒{while(i——);}void ds1820rst()/*ds1820复位*/{ uchar x=0;DQ = 1; //DQ复位delay_18B20(4);//延时DQ = 0;//DQ拉低delay_18B20(100); //精确延时大于480us DQ = 1; //拉高delay_18B20(40);}uchar ds1820rd()/*读数据*/{ uchar i=0;uchar dat = 0;for (i=8;i〉0;i--){ DQ = 0;//给脉冲信号dat>〉=1;DQ = 1;//给脉冲信号if(DQ)dat|=0x80;delay_18B20(10);}return(dat);}void ds1820wr(uchar wdata)/*写数据*/ {uchar i=0;for (i=8; i>0;i——){ DQ = 0;DQ = wdata&0x01;delay_18B20(10);DQ = 1;wdata>>=1;}}read_temp()/*读取温度值并转换*/ {uchar a,b;ds1820rst();ds1820wr(0xcc);//*跳过读序列号*/ds1820wr(0x44);//*启动温度转换*/ds1820rst();ds1820wr(0xcc);//*跳过读序列号*/ds1820wr(0xbe);//*读取温度*/a=ds1820rd();b=ds1820rd();tvalue=b;tvalue<〈=8;tvalue=tvalue|a;if(tvalue<0x0fff)tflag=0;else{tvalue=~tvalue+1;tflag=1;}tvalue=tvalue*(0.625);//温度值扩大10倍,精确到1位小数return(tvalue);}/*******************************************************************/void ds1820disp()//温度值显示{ uchar flagdat;disdata[0]=tvalue/1000+0x30;//百位数disdata[1]=tvalue%1000/100+0x30;//十位数disdata[2]=tvalue%100/10+0x30;//个位数disdata[3]=tvalue%10+0x30;//小数位if(tflag==0)flagdat=0x20;//正温度不显示符号elseflagdat=0x2d;//负温度显示负号:—if(disdata[0]==0x30){disdata[0]=0x20;//如果百位为0,不显示if(disdata[1]==0x30){disdata[1]=0x20;//如果百位为0,十位为0也不显示}}wr_com(0xc0);wr_dat(flagdat);//显示符号位wr_com(0xc1);wr_dat(disdata[0]);//显示百位wr_com(0xc2);wr_dat(disdata[1]);//显示十位wr_com(0xc3);wr_dat(disdata[2]);//显示个位wr_com(0xc4);wr_dat(0x2e);//显示小数点wr_com(0xc5);wr_dat(disdata[3]);//显示小数位}void DispCode(){unsigned char i,temp;ds1820rst();ds1820wr(0x33);for (i=0;i〈8;i++){fCode[i]=ds1820rd();}wr_com(0x80+0x40);for (i=0;i<8;i++){temp = fCode[i]〉>4; //显示高四位if (temp〈10)wr_dat(temp + 0x30);elsewr_dat(temp + 0x37);temp = fCode[i]&0x0f;//显示低四位if (temp〈10)wr_dat(temp+ 0x30);elsewr_dat(temp + 0x37);}}/********************主程序***********************************/ void main(){init_play();//初始化显示DispCode(); //系列号显示delay1ms(1000);while(1){//read_temp();//读取温度// ds1820disp();//显示;}}程序二:匹配序列号,并读温度。
18B20温度传感器C51单片机子程序
#include <intrins.h>
#define uchar unsigned char //无符号字符型宏定义变量范围0~255
#define uint unsigned int//无符号整型宏定义变量范围0~6553
sbit DQ=P2^4;//18B20端口定义
write_ds18b20_byte(0x44);//进行温度转换
init_ds18b20();//初始化
write_ds18b20_byte(0xcc);//忽略ROM指令
write_ds18b20_byte(0xbe);//读暂存器指令
a=read_ds18b20_byte();//读取低8位
b=read_ds18b20_byte();//读取高8位
{
uchar i=0;
uchar dat=0;
for(i=0;i<8;i++)//一个字节为8位,所以循环8次
{
DQ=0;//数据线拉低
dat=dat>>1;//字节右移一位
DQ=1;//数据线拉高
if(DQ==1)//判断读回是否为1
{
dat=dat|0x80;//最高位或上一个1,使得最高位变为1
ds18b20初始化
***************************************************************************************************/
void init_ds18b20()//初始化
{
DQ=1;//数据线拉高
delay2(8);//大约80us
DS18b20温度测量程序。单片机C51控制
//DS18B20的读写程序,数据脚P3.3 ////温度传感器18B20汇编程序,采用器件默认的12位转化 ////最大转化时间750微秒,显示温度-55到+125度,显示精度 ////为0.1度,显示采用4位LED共阳显示测温值 ////P0口为段码输入,P24~P27为位选 ///***************************************************/#include "reg51.h"#include "intrins.h" //_nop_();延时函数用#define Disdata P1 //段码输出口#define discan P0 //扫描口#define uchar unsigned char#define uint unsigned intsbit DQ=P3^2; //温度输入口uint h;//**************温度小数部分用查表法***********//uchar code ditab[16]={0x00,0x01,0x01,0x02,0x03,0x03,0x04,0x04,0x05,0x06,0x06,0x07,0x08,0x08,0x09,0x09 };//uchar dd[10]={0x00,0x01,0x02,0x03,0x04,0x05,0x06,0x07,0x08,0x09};//共阳LED段码表 "0" "1" "2" "3" "4" "5" "6" "7" "8" "9" "不亮" "-"uchar scan_con[4]={0x00,0x01,0x02,0x03}; //列扫描控制字uchar temp_data[2]={0x00,0x00}; //读出温度暂放uchar display[4]={0x00,0x00,0x00,0x00,}; //显示单元数据,共4个数据和一个运算暂用///////***********11微秒延时函数**********///void delay(uint t){for(;t>0;t--);}///***********显示扫描函数**********/scan(){uchar k;for(k=0;k<3;k++){P0=0xff;dd[k]=dd[display[k]];dd[k]=dd[k]*16;dd[k]=dd[k]|scan_con[k];P0=dd[k];delay(90);P0=0xff;}}/////***********18B20复位函数**********/ ow_reset(void){char presence=1;while(presence){while(presence){DQ=1;_nop_();_nop_();DQ=0; //delay(50); // 550usDQ=1; //delay(6); // 66uspresence=DQ; // presence=0继续下一步 }delay(45); //延时500uspresence = ~DQ;}DQ=1;}/////**********18B20写命令函数*********/ //向 1-WIRE 总线上写一个字节void write_byte(uchar val){uchar i;for (i=8; i>0; i--) //DQ=1;_nop_();_nop_();DQ = 0;_nop_();_nop_();_nop_();_nop_();_nop_();//5us DQ = val&0x01; //最低位移出delay(6); //66usval=val/2; //右移一位}DQ = 1;delay(1);}///*********18B20读1个字节函数********///从总线上读取一个字节uchar read_byte(void){uchar i;uchar value = 0;for (i=8;i>0;i--){DQ=1;_nop_();_nop_();value>>=1;DQ = 0; //_nop_();_nop_();_nop_();_nop_(); //4usDQ = 1;_nop_();_nop_();_nop_();_nop_(); //4usif(DQ)value|=0x80;delay(6); //66us}DQ=1;return(value);}///***********读出温度函数**********///read_temp(){ow_reset(); //总线复位write_byte(0xCC); // 发Skip ROM命令write_byte(0xBE); // 发读命令temp_data[0]=read_byte(); //温度低8位temp_data[1]=read_byte(); //温度高8位ow_reset();write_byte(0xCC); // Skip ROMwrite_byte(0x44); // 发转换命令}/***********温度数据处理函数**********/void work_temp(){display[3]=temp_data[0]&0x0f;display[0]=ditab[display[3]]; //小数部分display[3]=((temp_data[0]&0xf0)>>4)|((temp_data[1]&0x07)<<4); display[2]=display[3]/10%10;display[1]=display[3]%10;}/////**************主函数****************/main(){Disdata=0xff; //初始化端口discan=0xff;ow_reset(); // 开机先转换一次write_byte(0xCC); // Skip ROMwrite_byte(0x44); // 发转换命令for(h=0;h<500;h++){scan();} //开机显示"0000"2秒while(1){read_temp(); //读出18B20温度数据work_temp(); //处理温度数据scan(); //显示温度值2秒}}////*********************结束**************************//。
12864点阵型驱动程序(51单片机、c语言)

** 功能描述:在液晶显示器上写一个ASCII字符,写之前需要使用setxy()函数确定位置
** 输入参数:uchar ascii:字符对应的ascii码
** 输出参数:
** 返 回 值:
** 作 者:xiwangcumt
** 日 期:
**********************************************************/
** 功能描述:C语言下最精确最简单的延时函数,延时时间为2*t+2(us)
** 输入参数:t-延时时间参数
** 输出参数:
** 返 回 值:
** 作 者:xiwangcumt
** 日 期:
**********************************************************/
void setp(uchar n)
{
switch(n){
case 0: cs1=1;cs2=1; break;
case 1: cs1=1;cs2=0; break;
case 2: cs1=0;cs2=1; break;
default:break;}
}
/*********************************************************
** 输入参数:uchar dat
** 输出参数:
** 返 回 值:
** 作 者:xiwangcumt
** 日 期:
**********************************************************/
51单片机实现定时器2、12864液晶显示、显示图片、滚动字符、DS18B20、转速、超声波测距、速

//*******************资源配置***********************////******计数器0用于超声波记录接收端高电平时长*******////******计数器1用于记录1s内外部脉冲数目即转速*******////********定时器2用于精确定时,定时时间50ms*********////*****************P3^5用于脉冲计数*****************//#include <reg52.H>#include <intrins.h>//*************特殊引脚定义*****************//sbit RX = P1^0; //超声波接收端sbit TX = P1^1; //超声波触发端sbit RS = P2^6;//LCD数据/命令控制端sbit RW = P2^5;//读写控制端sbit EN = P2^7; //使能端sbit RES= P2^4; //复位端sbit PSB= P2^3; //并口/串口选择端sbit DQ = P3^7; //DS18B20数据端sbit BEEP=P1^5; //蜂鸣器#define DataPort P0 //MCU P0<------> LCM#define uchar unsigned char#define uint unsigned int//***********Function Definition*********************////****************函数声明***************************//void LCD_Write_number(uchar s);void Write_char(bit start, uchar ddata); //写入某坐标void Send_byte(uchar bbyte);void Lcd_init(void);//lcd初始化void Disp_img(uchar *img);//显示图片void LCD_Write_string(uchar X,uchar Y,uchar*s); //写入某字符串void LCD_set_xy( uchar x,uchar y );void Lcd_Mark3(void); //画面3void Lcd_Mark2(void); //画面2bit temp_flag; //判断DS18B20正常工作位DS18B20_init();//DS18B20初始化void delay(uint num);//DS18B20延时函数void Delaynms(uint di);//短延时void delayms(uint x);//1ms延时函数readonebyte(void);//读一个字节函数void writeonebyte(uchar dat); //写一个字节函数void gettemperture(void);//获取温度值void temperture_display(); //温度显示函数void tempconv(); //温度转换void beep(); //蜂鸣器响一声函数void timer_init(); //中断初始化函数(计数器0,计数器1,定时器2)void zhuansu_display(); //转速显示函数void speed_conv(); //速度转换函数void speed_display(); //速度显示函数void chaoshengbo_conv(void); //超声波转换//***************变量定义*****************//uchar data temp_dat[2]={0}; //temp[0],temp[1]用来存放温度的低、高8位uchar data DQdisp_buf[5]={0}; //温度显示缓冲区uchar zhuansu_buff[6]={0}; //转速显示缓存uchar speed_buff[6]={0};//速度显示缓存uchar temp_comp; //存放温度整数部分uchar DS18B20_OK,speed2;//DS18B20_OK=0复位正常uchar t2=0,T,L,H,WENDU; //t2代表timer2中断次数,T代表温度整数部分//H:温度高8位,L:温度低8位uint time=0; //超声波往返时间long S=0,num1=0,speed; //s表示超声波距离,num1表示发动机转速// speed表示车轮转速=》速度bit flag =0; //超声波中断溢出标志位uchar disbuff[4]={0}; //超声波数据显示缓存uchar code num[]={"09 :.-℃"};uchar code line1_data[]={"速度:km/h"};uchar code line2_data[]={"转速:r/min"};uchar code line3_data[]={"前方车距:m"};uchar code line4_data[]={"车内温度: "};uchar code line5_data[]={" #**欢迎使用**# "};uchar code line6_data[]={" 您的安全"};uchar code line7_data[]={" 是全家人"};uchar code line8_data[]={" 最大的幸福···"};uchar code picture[]={0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x14,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x06,0x30,0x01,0xE0,0x00,0x00,0x2A,0x00,0x00,0xD8,0x00,0x00,0x00,0x00,0x 00,0x00,0x0F,0x7B,0x63,0xE0,0x00,0x00,0x22,0x00,0x01,0x24,0x00,0x00,0x00,0x00,0x0 0,0x00,0x0F,0xFB,0x63,0x07,0x34,0x00,0x14,0x00,0x01,0x04,0x00,0x00,0x00,0x00,0x0 0,0x00,0x0D,0xDB,0x63,0x01,0xBC,0x00,0x08,0x00,0x00,0x88,0x00,0x00,0x00,0x00,0x0x00,0x0C,0x1B,0x63,0x07,0xB0,0x00,0x00,0x00,0x00,0x50,0x00,0x00,0x00,0x00,0x0 0,0x00,0x0C,0x1B,0x63,0xED,0xB0,0xDB,0x00,0x01,0x00,0x20,0x00,0x00,0x00,0x00,0x 00,0x00,0x0C,0x19,0xE1,0xE7,0xB0,0xDB,0x00,0x02,0x00,0x00,0x00,0x00,0x00,0x00,0x 00,0x00,0x0C,0x19,0xE1,0xE7,0xB0,0xDB,0x00,0x02,0x00,0x00,0x00,0x00,0x00,0x00,0x 00,0x00,0x00,0x00,0x60,0x00,0x00,0x00,0x00,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x03,0xC0,0x00,0x00,0x00,0x00,0x08,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x08,0x05,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x10,0x0A,0x80,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x0A,0x00,0x00,0xFF,0xF8,0xE0,0x05,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x06,0xC0,0x15,0x00,0x1F,0xFF,0xFF,0xC0,0x02,0x00,0x00,0x00,0x00,0x00,0x00 ,0x00,0x09,0x20,0x11,0x00,0xFB,0xFF,0xE1,0xF8,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x08,0x20,0x0A,0x03,0x9F,0x00,0x9E,0x3E,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x04,0x40,0x04,0x0E,0x70,0x00,0x81,0xC7,0x80,0x01,0x40,0x00,0x00,0x00,0x0 0,0x00,0x02,0x80,0x00,0x1D,0x80,0x00,0xE0,0x61,0xE0,0x02,0xA0,0x00,0x00,0x00,0x 00,0x00,0x01,0x00,0x00,0x77,0x9F,0xFC,0xF0,0x18,0xF8,0x02,0x20,0x00,0x00,0x00,0x00x00,0x00,0x00,0x01,0xDF,0x00,0x00,0xF3,0x0C,0x3C,0x01,0x40,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x03,0x9E,0x00,0x00,0xF8,0x06,0x1E,0x00,0x80,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x07,0x0E,0x30,0x01,0xFC,0x7F,0x07,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x07,0x0E,0x30,0x01,0xFC,0x7F,0x07,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x7E,0xFF,0xFF,0xFF,0xFF,0xFF,0x83,0xC0,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x0F,0xFD,0xFF,0xFF,0xFF,0xFF,0xFC,0x01,0xF0,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x3F,0x81,0xFF,0x00,0x00,0x00,0x00,0x1F,0xF0,0x00,0x00,0x00,0x00,0x00 ,0x00,0x00,0xFE,0xF0,0x00,0x00,0x01,0x00,0x00,0xC0,0x1C,0x00,0x00,0x00,0x00,0x0 0,0x00,0x03,0xC0,0x07,0x80,0x00,0x03,0xE0,0x07,0x00,0x1C,0x00,0x00,0x00,0x00,0x0 0,0x00,0x03,0x80,0x03,0x40,0x00,0x03,0xE0,0x0C,0x00,0x0E,0x00,0x00,0x00,0x00,0x0 0,0x00,0x07,0x00,0x00,0xC0,0x00,0x00,0x20,0x18,0x00,0x07,0x00,0x00,0x00,0x00,0x0 0,0x00,0x09,0x01,0x80,0x60,0x00,0x00,0x20,0x73,0x9F,0x03,0x80,0x00,0x00,0x00,0x0 0,0x00,0x1E,0x0F,0xF2,0x20,0x00,0x00,0x20,0x67,0xFF,0xC1,0xC0,0x00,0x00,0x00,0x0 0,0x00,0x1E,0x1F,0xF9,0x30,0x00,0x00,0x20,0xEF,0xFF,0xE0,0xE0,0x00,0x00,0x00,0x00 ,0x00,0x38,0x3F,0xFC,0x90,0x00,0x00,0x20,0xCB,0xFF,0xF9,0xF0,0x00,0x00,0x00,0x00 ,0x00,0x7F,0x7F,0xFE,0x10,0x00,0x00,0x20,0xDB,0xFF,0xFF,0xF0,0x00,0x00,0x00,0x00, 0x00,0x6E,0xF9,0xBF,0x10,0x00,0x00,0x20,0xF7,0xED,0xFF,0xF0,0x00,0x00,0x00,0x00 ,0x00,0x7C,0xFC,0x3F,0x10,0x00,0x00,0x20,0x67,0xE1,0xFD,0xE0,0x00,0x00,0x00,0x0 0,0x00,0x7C,0xFC,0x3F,0x10,0x00,0x00,0x20,0x67,0xE1,0xFD,0xE0,0x00,0x00,0x00,0x0 0,0x00,0x38,0xFC,0x3F,0x18,0x00,0x00,0x20,0x87,0xE0,0xFD,0xC0,0x00,0x00,0x00,0x0 0,0x00,0x38,0xF1,0x8F,0x18,0x00,0x1F,0xE7,0x87,0x9C,0x7D,0xC0,0x00,0x00,0x00,0x0 0,0x00,0x1C,0xFE,0x1F,0x81,0xFF,0xFF,0xC0,0x0F,0xE0,0xFF,0x80,0x00,0x00,0x00,0x00, 0x00,0x0C,0xFC,0x3F,0x80,0x00,0x00,0x00,0x0F,0xE1,0xF8,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0xF9,0xBF,0xFF,0xFF,0xFF,0xFF,0xFF,0xEC,0xFE,0x00,0x00,0x00,0x00,0x00, 0x00,0x03,0xF9,0xBF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xC0,0x00,0x00,0x00,0x00, 0x00,0x0F,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0 0,0x00,0x00,0x00,0x00,0x00,0x00};//************************************************////********** DS18B20 ********////************************************************////************************************************////************蜂鸣器响一声函数*******//void beep(){BEEP=0; //开蜂鸣器delayms(500); //延时半秒BEEP=1; //关蜂鸣器delayms(500); //延时半秒}//************温度转换***************//void tempconv(){uchar sign=0; //定义符号标志位uchar temp; //定义温度数据暂存if(H>127) //大于127,即高4位全为1,即温度为负值{L=(~L)+1; //取反加1,将补码变成原码if((~L)>=0xff) //H=(~L)+1; //取反加一else H=~H; //否则只取反sign=1; //置符号标志位为1}temp=L&0x0f; //取小数位DQdisp_buf[0]=temp*0.625; //所获得的是四位数,所测温度加大了10倍DQdisp_buf[0]=DQdisp_buf[0]%1000%100%10;//将小数部分转换成ASCII码temp_comp=((L&0xf0)>>4|(H&0x0f)<<4); //取温度整数部分DQdisp_buf[3]=temp_comp/100; //温度百位temp=temp_comp%100; //温度的十位和个位一起DQdisp_buf[2]=temp/10; //温度十位DQdisp_buf[1]=temp%10; //温度个位if(DQdisp_buf[3]==0) //如果温度的百位为0{DQdisp_buf[3]=17; //则不显示,if(DQdisp_buf[2]==0) //在这种前提下,如果十位也为0的话,DQdisp_buf[2]=17; //不显示十位}if(sign)DQdisp_buf[3]=13; //如果符号标志位为1,则显示负号}//************温度显示函数**************//void temperture_display(){LCD_set_xy(4,4); //从第四行第5列开始显示LCD_Write_number(11);LCD_Write_number(DQdisp_buf[3]); //显示百位LCD_Write_number(DQdisp_buf[2]); //显示十位LCD_Write_number(DQdisp_buf[1]); //显示个位LCD_Write_number(12); //小数点LCD_Write_number(DQdisp_buf[0]); //十分位LCD_set_xy(4,7);Write_char(1,num[14]);Write_char(1,num[15]);}//************获取温度值*****************//void gettemperture(void){uchar i;DS18B20_init(); //DS18B20初始化if(DS18B20_OK==0) //如果正常{writeonebyte(0xcc); //跳过读序列号的操作writeonebyte(0x44); //启动温度转换for(i;i<100;i++) //调用显示函数延时,等待A/D转换完成,分辨率为12位的需要延时750ms以上temperture_display();DS18B20_init(); //DS18B20初始化writeonebyte(0xcc); //跳过读序列号的操作writeonebyte(0xbe); //读取温度寄存器temp_dat[0]=readonebyte(); //温度低8位放入temp_dat[0]temp_dat[1]=readonebyte(); //温度高8位放入temp_dat[1]L=temp_dat[0]; //温度低8位H=temp_dat[1]; //温度高8位temp_flag=1; //接收正常}else temp_flag=0; //否则接收不正常}//************写一个字节函数*****************//void writeonebyte(uchar dat){uchar i=0;for(i=8;i>0;i--){DQ=0;DQ=dat&0x01;delay(5);DQ=1;dat>>=1;}}//************读一个字节函数***************//readonebyte(void){uchar i=0;uchar dat=0;for(i=8;i>0;i--){DQ=0;dat>>=1;DQ=1;if(DQ)dat|=0x80;delay(4);}return (dat);}//***************DS18B20延时函数************//void delay(uint num){while(--num);}//***************DS18B20初始化*******************//DS18B20_init(void){DQ=1; //DQ复位delay(8); //延时DQ=0; //单片机将DQ拉低delay(90); //等待至少480us的时间DQ=1; //拉高总线delay(8); //等待DS18B20反馈存在低脉冲,单片机检测DS18B20_OK=DQ; //如果为0,则初始化成功,为1,初始化失败delay(100);DQ=1;return (DS18B20_OK); //返回信号,若DS18B20_OK为0,则存在,若DS18B20_OK=1;则不存在}//************************************************////********** LCD 12864 ********////************************************************////************************************************/void Lcd_init(void) //初始化LCD{delayms(40); //大于40MS的延时程序PSB=1; //设置为8BIT并口工作模式delayms(1); //延时RES=0; //复位delayms(1); //延时RES=1; //复位置高delayms(1);Write_char(0,0x30); //选择基本指令集delayms(1); //延时大于100usWrite_char(0,0x30); //选择8bit数据流delayms(1); //延时大于37usWrite_char(0,0x0c); //开显示(无游标、不反白)delayms(1); //延时大于100usWrite_char(0,0x01); //清除显示,并且设定地址指针为00Hdelayms(1); //延时大于10msWrite_char(0,0x06); //指定在资料的读取及写入时,设定游标的移动方向及指定显示的移位,光标从右向左加1位移动delayms(1); //延时大于100us}/******************************************************************** **********//*------------------------------------------------检测忙位------------------------------------------------*/void Check_Busy(){RS=0;RW=1;EN=1;DataPort=0xff;while((DataPort&0x80)==0x80);//忙则等待EN=0;}void Write_char(bit start, uchar ddata) //start=0写指令,start=1写数据{if(start==0) //如果start==0,检查忙碌位后写指令{ Check_Busy(); //忙碌则等待RS=0;RW=0;EN=0;DataPort=ddata; //发送指令_nop_();_nop_();EN=1;_nop_();_nop_();_nop_();_nop_();EN=0;}else //如果start==1,即可以开始{ Check_Busy(); //再次检查,进行些数据操作RS=1;RW=0;EN=1;DataPort=ddata;EN=0;}}/******************************************************************** **********/void Delaynms(uint di) //延时0.1ms左右{uint da,db;for(da=0;da<di;da++)for(db=0;db<10;db++);}/******************************************************************** **********/void Disp_img(uchar *img) //图形方式12864显示字模221 横向取膜{uchar i,j;uint k = 0;Write_char(0,0x34); //图形方式,关闭for(i=0;i<32;i++) //每行128位。
51单片机测温18b20和LCD12864程序知道

基于STC89C52单片机的18b20测温程序主程序:/***************************************************************************** 使用单片机:STC89C52晶振频率:11.0592MHZ开发环境:Keil4.0功能简述:调试用12864LCD的显示功能,蜂鸣器报警装置******************************************************************************/ #include<reg52.h>#include<intrins.h>#include<stdio.h>#include <math.h>#define uchar unsigned char#define uint unsigned int#define lcd_data P0#include "lcd.h"#include "ds18b20.h"code uchar Display1[8]={"实际温度"};code uchar Display2[8]={"报警温度"};sbit sl=P0^3;sbit sr=P0^4;sbit su=P0^5;sbit sd=P0^6;char f=0; //定义标志位sbit beep=P1^7; //蜂鸣器uint temp,templa; //定义整形温度数据float f_temp; //定义浮点型得温度数据int Actual_Temp;int Alarm_Temp;unsigned char code table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};void delay(uint z) //延时函数{uint x,y;for(x=z;x>0;x--)for(y=110;y>0;y--);}void Key_Scan() //键盘扫描程序{if(sl==0) //实现光标的左移{delay(5); //消抖if(sl==0){while(!sl); //按键松手检测等待按键释放if(f==0)f=4;else f--; // 按键自减1}}if(sr==0) //实现光标的右移{delay(5); //消抖if(sr==0){while(!sr); //按键松手检测f++;if(f==4)f=0;}}if(su==0) //实现按键加的功能{delay(5); //消抖if(su==0){while(!su); //按键松手检测if(f==1){Alarm_Temp=Alarm_Temp+100;}if(f==2){Alarm_Temp=Alarm_Temp+10;}if(f==3){Alarm_Temp=Alarm_Temp+1;}}}if(sd==0) // 实现按键减的功能{delay(5); //消抖if(sd==0){while(!sd); //按键松手检测if(f==1){Alarm_Temp=Alarm_Temp-100;}if(f==2){Alarm_Temp=Alarm_Temp-10;}if(f==3){Alarm_Temp=Alarm_Temp-1;}}}Alarm_Temp= Alarm_Temp;}void LCD_Display(int value,char x,char y){uint abs_value;code uchar Display_Dot[1]={"."};code uchar Display_Unit[1]={"C"};if(value<0){LCD_Pos(x,y-1);LCD_SendData("-",1);}else{LCD_Pos(x,y-1);LCD_SendData("+",1);}abs_value=abs(value);LCD_Pos(x,y);LCD_Write(abs_value/100+0x30,1);LCD_Write(abs_value%100/10+0x30,1);LCD_SendData(Display_Dot,1); //显示小数点LCD_Write(abs_value%10+0x30,1);LCD_SendData(Display_Unit,1); //显示单位}void LCD_DisplayTemp() ////显示实际温度与报警温度值{LCD_Display(Actual_Temp ,0,5);LCD_Display(Alarm_Temp ,1,5);switch(f){case 0:LCD_Pos(2,5);LCD_Write(32,1); //显示空白字符LCD_Write(32,1); //显示空白字符LCD_Write(32,1); //显示空白字符LCD_Write(32,1); //显示空白字符break;case 1:LCD_Pos(2,5);LCD_Write(24,1); //显示向上指针LCD_Write(32,1); //显示空白字符LCD_Write(32,1); //显示空白字符LCD_Write(32,1); //显示空白字符break;case 2: LCD_Pos(2,5);LCD_Write(32,1); //显示空白字符LCD_Write(24,1); //显示向上指针LCD_Write(32,1); //显示空白字符LCD_Write(32,1); //显示空白字符break;case 3:LCD_Pos(2,5);LCD_Write(32,1); //显示空白字符LCD_Write(32,1); //显示空白字符LCD_Write(24,1); //显示向上指针LCD_Write(32,1); //显示空白字符case 4:LCD_Pos(2,5);LCD_Write(32,1); //显示空白字符LCD_Write(32,1); //显示空白字符LCD_Write(32,1); //显示向上指针LCD_Write(24,1); //显示空白字符}}void DS18B20_TempChange(void) //DS18B20 开始获取温度并转换{DS18B20_Reset();delay(1);DS18B20_WriteByte(0xcc); // 写跳过读ROM指令DS18B20_WriteByte(0x44); // 写温度转换指令}void DS18B20_GetTemp() // 从DS18B20读取寄存器中存储的温度数据{uchar a,b;DS18B20_Reset();delay(1);DS18B20_WriteByte(0xcc);DS18B20_WriteByte(0xbe);a=DS18B20_Read(); //读低8位b=DS18B20_Read(); //读高8位temp=b;temp<<=8; //两个字节组合为1个字temp=temp|a;if(temp&0x80==0x80) temp=-(~temp+1); //判断实测温度的正负f_temp=temp*0.0625; //温度在寄存器中为12位分辨率位0.0625°temp=f_temp*10+0.5; //乘以10表示小数点后面只取1位,加0.5是四舍五入 f_temp=f_temp+0.05;Actual_Temp=temp; //temp是整型}void Beep_Warn() //蜂鸣器报警{if(Actual_Temp>Alarm_Temp)beep=0; //蜂鸣器响elsebeep=1; //蜂鸣器不响}void main(){ uint i;LCD_init(); //初始化LCDLCD_Clear(); //LCD清屏LCD_Pos(0,0); //设置显示位置为第一行的第一个字符LCD_SendData(Display1,8); //显示:实际温度LCD_Pos(1,0); //设置显示位置为第二行的第一个字符LCD_SendData(Display2,8); //显示报警温度while(1){ DS18B20_TempChange( );for(i=0;i<10;i++){Beep_Warn ();DS18B20_GetTemp();LCD_DisplayTemp(); //调用显示函数}Key_Scan(); //调用键盘函数}}//程序很棒,仅供参考,不明白处可留言。
12864串口C51程序

}
//串行发送一字节数据
void SendByte(unsigned ch
for(i=0;i <8;i++)
sbit RW_SID=P3^1;//data input/output 串行数据输入、输出端
//sbit RS_CS =P3^5;//chip select 片选端
// SendCMD(0x0F);//显示设定,开显示,显示光标,当前显示位反白闪动
}
void main(void)
{
initlcm();
SendCMD(0x81);//1000,0001 设定DDRAM 7位地址000,0001到地址计数器AC
delay(100);
display(0x90,0xb0,0xb2);//安
display(0x91,0xbb,0xD5);//徽
display(0x92,0xb5,0xe7);//电
display(0x93,0xc1,0xA6);//力
display(0x94,0xc5,0xe0);//培
display(0x95,0xD1,0xb5);//训
display(0x8B,0xc1,0xA6);//力
display(0x8C,0xc5,0xe0);//培
display(0x8D,0xD1,0xb5);//训
//sbit PSB =P3^6;//serial mode select 串口模式
sbit RST =P1^2;
void delay(unsigned int n)
{
unsigned int i;
18b20详细中文资料及C语言程序

//此值被写入 TL
DS18B20_writebyte(0x1f|(res<<5)); //设置精度 0 res[1-0] 11111
}
/*****************************
DS18B20 温度读取函数
*****************************/
long DS18B20_GetTemperature()
************************************/
uchar DS18B20_readbyte()
{
uchar i,j,dat;
dat=0;
j=1;
for(i=0;i<8;i++)
{
if(DS18B20_readbit())
{
dat=dat+(j<<i);
}
}
return (dat);
DQ=1;
//数据线拉高
i++;i++; //延时 4 微秒
x=DQ;
//读数据线状态
Delay_50us();//延时 50 微秒
return (x); //返回数值
}
/***********************************
DS18B20 写一位函数
1、将数据线拉高
2、延时大于 1 微秒(两次写片段的间隙)
内部 RAM 中 9 字节的内容
写暂存 器
发出向内部 RAM 的 3、4 字节写上、下 4EH 限温度数据命令,紧跟该命令之后,是传送
两字节的数据。
复制暂 存器
将 RAM 中第 3、4 字节的内容复制到 48H EEPROM 中。
(整理)数字温度传感器18b20编程

ds18b20汇编程序:本汇编程序仅适合单个DS18B20和51单片机的连接,晶振为12 MHZ左右DQ:DS18B20的数据总线接脚FLAG1:标志位,为"1"时表示检测到DS18B20TEMPER_NUM:保存读出的温度数据TEMPER_LEQU36HTEMPER_HEQU35HDQBITP1.7; DS18B20初始化汇编程序;//*****************************************//INIT_1820:SETBDQNOPCLRDQMOVR0,#06BHTSR1:DJNZR0,TSR1; 延时SETBDQMOVR0,#25HTSR2:JNBDQ,TSR3DJNZR0,TSR2LJMPTSR4; 延时TSR3:SETBFLAG1; 置标志位,表示DS1820存在LJMPTSR5TSR4:CLRFLAG1; 清标志位,表示DS1820不存在LJMPTSR7TSR5:MOVR0,#06BHTSR6:DJNZR0,TSR6; 延时TSR7:SETBDQRET;//*****************************************// ; 重新写DS18B20暂存存储器设定值;//*****************************************//RE_CONFIG:JBFLAG1,RE_CONFIG1; 若DS18B20存在,转RE_CONFIG1 RETRE_CONFIG1:MOVA,#0CCH; 发SKIP ROM命令LCALLWRITE_1820MOVA,#4EH; 发写暂存存储器命令LCALLWRITE_1820MOVA,#00H; TH(报警上限)中写入00HLCALLWRITE_1820MOVA,#00H; TL(报警下限)中写入00HLCALLWRITE_1820MOVA,#1FH; 选择9位温度分辨率LCALLWRITE_1820RET;//*****************************************//; 读出转换后的温度值;//*****************************************//GET_TEMPER:SETBDQ; 定时入口LCALLINIT_1820JBFLAG1,TSS2RET; 若DS18B20不存在则返回TSS2:MOVA,#0CCH; 跳过ROM匹配LCALLWRITE_1820MOVA,#44H; 发出温度转换命令LCALLWRITE_1820LCALLINIT_1820MOVA,#0CCH; 跳过ROM匹配LCALLWRITE_1820MOVA,#0BEH; 发出读温度命令LCALLWRITE_1820LCALLREAD_1820MOVTEMPER_NUM,A; 将读出的温度数据保存RET;//*****************************************//; 读DS18B20的程序,从DS18B20中读出一个字节的数据;//*****************************************// READ_1820:MOVR2,#8RE1:CLRCSETBDQNOPNOPCLRDQNOPNOPNOPSETBDQMOVR3,#7DJNZR3,$MOVC,DQMOVR3,#23DJNZR3,$RRCADJNZR2,RE1RET;//*****************************************//; 写DS18B20的程序;//*****************************************// WRITE_1820:MOVR2,#8CLRCWR1:CLRDQMOVR3,#6DJNZR3,$RRCAMOVDQ,CMOVR3,#23DJNZR3,$SETBDQNOPDJNZR2,WR1SETBDQ RET;//*****************************************//; 读DS18B20的程序,从DS18B20中读出两个字节的温度数据;//*****************************************//READ_18200:MOVR4,#2; 将温度高位和低位从DS18B20中读出MOVR1,#36H; 低位存入36H(TEMPER_L),高位存入35H(TEMP ER_H)RE00:MOVR2,#8RE01:CLRCSETBDQNOPNOPCLRDQNOPNOPNOPSETBDQMOVR3,#7DJNZR3,$MOVC,DQMOVR3,#23DJNZR3,$RRCADJNZR2,RE01MOV@R1,ADECR1DJNZR4,RE00RET;//*****************************************//; 将从DS18B20中读出的温度数据进行转换;//*****************************************//TEMPER_COV:MOVA,#0F0HANLA,TEMPER_L; 舍去温度低位中小数点后的四位温度数值SWAPAMOVTEMPER_NUM,AMOVA,TEMPER_LJNBACC.3,TEMPER_COV1; 四舍五入去温度值INCTEMPER_NUMTEMPER_COV1:MOVA,TEMPER_HANLA,#07HSWAPAORLA,TEMPER_NUMMOVTEMPER_NUM,A; 保存变换后的温度数据LCALLBIN_BCDRET;//*****************************************//; 将16进制的温度数据转换成压缩BCD码;//*****************************************//BIN_BCD:MOVDPTR,#TEMP_TABMOVA,TEMPER_NUMMOVCA,@A+DPTRMOVTEMPER_NUM,ARETTEMP_TAB:DB00H,01H,02H,03H,04H,05H,06H,07HDB08H,09H,10H,11H,12H,13H,14H,15HDB16H,17H,18H,19H,20H,21H,22H,23HDB24H,25H,26H,27H,28H,29H,30H,31HDB32H,33H,34H,35H,36H,37H,38H,39HDB40H,41H,42H,43H,44H,45H,46H,47HDB48H,49H,50H,51H,52H,53H,54H,55HDB56H,57H,58H,59H,60H,61H,62H,63HDB64H,65H,66H,67H,68H,69H,70H;//*****************************************//下面还介绍一个ds18b20汇编程序;**********************************FLAG1 BIT F0 ;DS18B20存在标志位DQ BIT P1.7TEMPER_L EQU 29HTEMPER_H EQU 28HA_BIT EQU 35HB_BIT EQU 36H;************ds18b20汇编程序起始******************** ORG 0000HAJMP MAINORG 0100H;**************主程序开始************MAIN:LCALL INIT_18B20;LCALL RE_CONFIGLCALL GET_TEMPERAJMP CHANGE;**********DS18B20复位程序*****************INIT_18B20: SETB DQNOPCLR DQMOV R0,#0FBHTSR1: DJNZ R0,TSR1 ;延时SETB DQMOV R0,#25HTSR2: JNB DQ ,TSR3DJNZ R0,TSR2TSR3: SETB FLAG1 ;置标志位,表明DS18B20存在CLR P2.0 ;二极管指示AJMP TSR5TSR4: CLR FLAG1LJMP TSR7TSR5: MOV R0,#06BHTSR6: DJNZ R0,TSR6TSR7:SETB DQ ;表明不存在RET;********************设定DS18B20暂存器设定值********** ****;RE_CONFIG:;JB FLAG1,RE_CONFIG1;RET;RE_CONFIG1: MOV A,#0CCH ;放跳过ROM命令;LCALL WRITE_18B20;MOV A,#4EH;LCALL WRITE_18B20 ;写暂存器命令;MOV A,#00H ;报警上限中写入00H;LCALL WRITE_18B20;MOV A,#00H ;报警下限中写入00H; LCALL WRITE_18B20;MOV A,#1FH ;选择九位温度分辨率; LCALL WRITE_18B20; RET;*****************读转换后的温度值****************GET_TEMPER:SETB DQLCALL INIT_18B20JB FLAG1,TSS2RET ;若不存在则返回TSS2: MOV A,#0CCH ;跳过ROMLCALL WRITE_18B20MOV A,#44H ;发出温度转换命令LCALL WRITE_18B20LCALL DISPLAY ;延时LCALL INIT_18B20MOV A,#0CCH ;跳过ROMLCALL WRITE_18B20MOV A,#0BEH ;发出读温度换命令LCALL WRITE_18B20LCALL READ2_18B20 ;读两个字节的温度RET;***************写ds18b20汇编程序************WRITE_18B20:MOV R2,#8CLR CWR1:CLR DQMOV R3,#6DJNZ R3,$RRC AMOV DQ,CMOV R3,#23DJNZ R3,$SETB DQNOPDJNZ R2,WR1SETB DQRET;***********读18B20程序,读出两个字节的温度********* READ2_18B20:MOV R4,#2 ;低位存在29 H,高位存在28HMOV R1,#29HRE00: MOV R2,#8RE01: CLR CSETB CNOPNOPCLR DQNOPNOPNOPSETB DQMOV R3,#7DJNZ R3,$MOV C,DQMOV R3,#23DJNZ R3,$RRC ADJNZ R2,RE01MOV @R1,ADEC R1DJNZ R4,RE00RET;************读出的温度进行数据转换**************CHANGE: MOV A,29HMOV C,28H.0 ;将28H中的最低位移入CRRC AMOV C,28H.1RRC AMOV C,28H.2RRC AMOV C,28H.3RRC AMOV 29H,A;setb p2.0LCALL DISPLAY ;调用数码管显示子程序; setb P2.0LJMP MAIN;*******************DISPLAY******DISPLAY: mov a,29H;将29H中的十六进制数转换成10进制mov b,#10 ;10进制/10=10进制div abmov b_bit,a ;十位在amov a_bit,b ;个位在bmov dptr,#TAB ;指定查表启始地址mov r0,#4dpl1: mov r1,#250 ;显示1000次dplop: mov a,a_bit ;取个位数MOVC A,@A+DPTR ;查个位数的7段代码mov p0,a ;送出个位的7段代码clr p2.5;开个位显示acall d1ms ;显示1mssetb p2.5mov a,b_bit ;取十位数MOVC A,@A+DPTR ;查十位数的7段代码mov p0,a ;送出十位的7段代码clr p2.4;开十位显示acall d1ms ;显示1mssetb p2.4djnz r1,dplop ;100次没完循环djnz r0,dpl1 ;4个100次没完循环ret;***********************************D1MS: MOV R7,#80 ;1MS延时(按12MHZ算)DJNZ R7,$RET;*************************TAB: DB 0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H, 90H。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
#include<reg51.h> //包含单片机寄存器的头文件#include<intrins.h> //包含_nop_()函数定义的头文件unsigned char code digit[10]={"0123456789"}; //定义字符数组显示数字unsigned char code Str[]={"Test by DS18B20"}; //说明显示的是温度unsigned char code Error[]={"Error!Check!"}; //说明没有检测到DS18B20unsigned char code Temp[]={"Temp:"}; //说明显示的是温度unsigned char code Cent[]={"Cent"}; //温度单位/****************************************************************************** *以下是对液晶模块的操作程序******************************************************************************* /sbit RS=P2^4; //寄存器选择位,将RS位定义为P2.0引脚sbit RW=P2^5; //读写选择位,将RW位定义为P2.1引脚sbit E=P2^6; //使能信号位,将E位定义为P2.2引脚sbit BF=P0^7; //忙碌标志位,,将BF位定义为P0.7引脚/*****************************************************函数功能:延时1ms(3j+2)*i=(3×33+2)×10=1010(微秒),可以认为是1毫秒***************************************************/void delay1ms(){unsigned char i,j;for(i=0;i<10;i++)for(j=0;j<33;j++);}/*****************************************************函数功能:延时若干毫秒入口参数:n***************************************************/void delaynms(unsigned char n){unsigned char i;for(i=0;i<n;i++)delay1ms();}/*****************************************************函数功能:判断液晶模块的忙碌状态返回值:result。
result=1,忙碌;result=0,不忙***************************************************/bit BusyTest(void){bit result;RS=0; //根据规定,RS为低电平,RW为高电平时,可以读状态RW=1;E=1; //E=1,才允许读写_nop_(); //空操作_nop_();_nop_();_nop_(); //空操作四个机器周期,给硬件反应时间result=BF; //将忙碌标志电平赋给resultE=0; //将E恢复低电平return result;}/*****************************************************函数功能:将模式设置指令或显示地址写入液晶模块入口参数:dictate***************************************************/void WriteInstruction (unsigned char dictate){while(BusyTest()==1); //如果忙就等待RS=0; //根据规定,RS和R/W同时为低电平时,可以写入指令RW=0;E=0; //E置低电平(根据表8-6,写指令时,E为高脉冲,// 就是让E从0到1发生正跳变,所以应先置"0"_nop_();_nop_(); //空操作两个机器周期,给硬件反应时间P0=dictate; //将数据送入P0口,即写入指令或地址_nop_();_nop_();_nop_();_nop_(); //空操作四个机器周期,给硬件反应时间E=1; //E置高电平_nop_();_nop_();_nop_();_nop_(); //空操作四个机器周期,给硬件反应时间E=0; //当E由高电平跳变成低电平时,液晶模块开始执行命令}/*****************************************************函数功能:指定字符显示的实际地址入口参数:x***************************************************/void WriteAddress(unsigned char x){WriteInstruction(x|0x80); //显示位置的确定方法规定为"80H+地址码x"}/*****************************************************函数功能:将数据(字符的标准ASCII码)写入液晶模块入口参数:y(为字符常量)***************************************************/void WriteData(unsigned char y){while(BusyTest()==1);RS=1; //RS为高电平,RW为低电平时,可以写入数据RW=0;E=0; //E置低电平(根据表8-6,写指令时,E为高脉冲,// 就是让E从0到1发生正跳变,所以应先置"0"P0=y; //将数据送入P0口,即将数据写入液晶模块_nop_();_nop_();_nop_();_nop_(); //空操作四个机器周期,给硬件反应时间E=1; //E置高电平_nop_();_nop_();_nop_();_nop_(); //空操作四个机器周期,给硬件反应时间E=0; //当E由高电平跳变成低电平时,液晶模块开始执行命令}/*****************************************************函数功能:对LCD的显示模式进行初始化设置***************************************************/void LcdInitiate(void){delaynms(15); //延时15ms,首次写指令时应给LCD一段较长的反应时间WriteInstruction(0x38); //显示模式设置:16×2显示,5×7点阵,8位数据接口delaynms(5); //延时5ms,给硬件一点反应时间WriteInstruction(0x38);delaynms(5); //延时5ms,给硬件一点反应时间WriteInstruction(0x38); //连续三次,确保初始化成功delaynms(5); //延时5ms,给硬件一点反应时间WriteInstruction(0x0c); //显示模式设置:显示开,无光标,光标不闪烁delaynms(5); //延时5ms,给硬件一点反应时间WriteInstruction(0x06); //显示模式设置:光标右移,字符不移delaynms(5); //延时5ms,给硬件一点反应时间WriteInstruction(0x01); //清屏幕指令,将以前的显示内容清除delaynms(5); //延时5ms,给硬件一点反应时间}/************************************************************************以下是DS18B20的操作程序************************************************************************/sbit DQ=P1^3;unsigned char time; //设置全局变量,专门用于严格延时/*****************************************************函数功能:将DS18B20传感器初始化,读取应答信号出口参数:flag***************************************************/bit Init_DS18B20(void){bit flag; //储存DS18B20是否存在的标志,flag=0,表示存在;flag=1,表示不存在DQ = 1; //先将数据线拉高for(time=0;time<2;time++) //略微延时约6微秒;DQ = 0; //再将数据线从高拉低,要求保持480~960usfor(time=0;time<200;time++) //略微延时约600微秒; //以向DS18B20发出一持续480~960us的低电平复位脉冲DQ = 1; //释放数据线(将数据线拉高)for(time=0;time<10;time++); //延时约30us(释放总线后需等待15~60us让DS18B20输出存在脉冲)flag=DQ; //让单片机检测是否输出了存在脉冲(DQ=0表示存在)for(time=0;time<200;time++) //延时足够长时间,等待存在脉冲输出完毕;return (flag); //返回检测成功标志}/*****************************************************函数功能:从DS18B20读取一个字节数据出口参数:dat***************************************************/unsigned char ReadOneChar(void){unsigned char i=0;unsigned char dat; //储存读出的一个字节数据for (i=0;i<8;i++){DQ =1; // 先将数据线拉高_nop_(); //等待一个机器周期DQ = 0; //单片机从DS18B20读书据时,将数据线从高拉低即启动读时序dat>>=1;_nop_(); //等待一个机器周期DQ = 1; //将数据线"人为"拉高,为单片机检测DS18B20的输出电平作准备for(time=0;time<2;time++); //延时约6us,使主机在15us内采样if(DQ==1)dat|=0x80; //如果读到的数据是1,则将1存入datelsedat|=0x00;//如果读到的数据是0,则将0存入dat//将单片机检测到的电平信号DQ存入r[i]for(time=0;time<8;time++); //延时3us,两个读时序之间必须有大于1us的恢复期}return(dat); //返回读出的十进制数据}/*****************************************************函数功能:向DS18B20写入一个字节数据入口参数:dat***************************************************/void WriteOneChar(unsigned char dat){unsigned char i=0;for (i=0; i<8; i++){DQ =1; // 先将数据线拉高_nop_(); //等待一个机器周期DQ=0; //将数据线从高拉低时即启动写时序DQ=dat&0x01; //利用与运算取出要写的某位二进制数据,//并将其送到数据线上等待DS18B20采样for(time=0;time<10;time++);//延时约30us,DS18B20在拉低后的约15~60us期间从数据线上采样DQ=1; //释放数据线for(time=0;time<1;time++);//延时3us,两个写时序间至少需要1us的恢复期dat>>=1; //将dat中的各二进制位数据右移1位}for(time=0;time<4;time++); //稍作延时,给硬件一点反应时间}/****************************************************************************** 以下是与温度有关的显示设置******************************************************************************/ /*****************************************************函数功能:显示没有检测到DS18B20***************************************************/void display_error(void)unsigned char i;WriteAddress(0x00); //写显示地址,将在第1行第1列开始显示i = 0; //从第一个字符开始显示while(Error[i] != '\0') //只要没有写到结束标志,就继续写{WriteData(Error[i]); //将字符常量写入LCDi++; //指向下一个字符delaynms(100); //延时100ms较长时间,以看清关于显示的说明}while(1) //进入死循环,等待查明原因;}/*****************************************************函数功能:显示说明信息***************************************************/void display_explain(void){unsigned char i;WriteAddress(0x00); //写显示地址,将在第1行第1列开始显示i = 0; //从第一个字符开始显示while(Str[i] != '\0') //只要没有写到结束标志,就继续写{WriteData(Str[i]); //将字符常量写入LCDi++; //指向下一个字符delaynms(100); //延时100ms较长时间,以看清关于显示的说明}}/*****************************************************函数功能:显示温度符号***************************************************/void display_symbol(void){unsigned char i;WriteAddress(0x40); //写显示地址,将在第2行第1列开始显示i = 0; //从第一个字符开始显示while(Temp[i] != '\0') //只要没有写到结束标志,就继续写{WriteData(Temp[i]); //将字符常量写入LCDi++; //指向下一个字符delaynms(50); //延时1ms给硬件一点反应时间}/*****************************************************函数功能:显示温度的小数点***************************************************/void display_dot(void){WriteAddress(0x49); //写显示地址,将在第2行第10列开始显示WriteData('.'); //将小数点的字符常量写入LCDdelaynms(50); //延时1ms给硬件一点反应时间}/*****************************************************函数功能:显示温度的单位(Cent)***************************************************/void display_cent(void){unsigned char i;WriteAddress(0x4c); //写显示地址,将在第2行第13列开始显示i = 0; //从第一个字符开始显示while(Cent[i] != '\0') //只要没有写到结束标志,就继续写{WriteData(Cent[i]); //将字符常量写入LCDi++; //指向下一个字符delaynms(50); //延时1ms给硬件一点反应时间}}/*****************************************************函数功能:显示温度的整数部分入口参数:x***************************************************/void display_temp1(unsigned char x){unsigned char j,k,l; //j,k,l分别储存温度的百位、十位和个位j=x/100; //取百位k=(x%100)/10; //取十位l=x%10; //取个位WriteAddress(0x46); //写显示地址,将在第2行第7列开始显示WriteData(digit[j]); //将百位数字的字符常量写入LCDWriteData(digit[k]); //将十位数字的字符常量写入LCDWriteData(digit[l]); //将个位数字的字符常量写入LCDdelaynms(50); //延时1ms给硬件一点反应时间}/*****************************************************函数功能:显示温度的小数数部分入口参数:x***************************************************/void display_temp2(unsigned char x){WriteAddress(0x4a); //写显示地址,将在第2行第11列开始显示WriteData(digit[x]); //将小数部分的第一位数字字符常量写入LCDdelaynms(50); //延时1ms给硬件一点反应时间}/*****************************************************函数功能:做好读温度的准备***************************************************/void ReadyReadTemp(void){Init_DS18B20(); //将DS18B20初始化WriteOneChar(0xCC); // 跳过读序号列号的操作WriteOneChar(0x44); // 启动温度转换for(time=0;time<100;time++); //温度转换需要一点时间Init_DS18B20(); //将DS18B20初始化WriteOneChar(0xCC); //跳过读序号列号的操作WriteOneChar(0xBE); //读取温度寄存器,前两个分别是温度的低位和高位}/*****************************************************函数功能:主函数***************************************************/void main(void){unsigned char TL; //储存暂存器的温度低位unsigned char TH; //储存暂存器的温度高位unsigned char TN; //储存温度的整数部分unsigned char TD; //储存温度的小数部分LcdInitiate(); //将液晶初始化delaynms(5); //延时5ms给硬件一点反应时间if(Init_DS18B20()==1)display_error();display_explain();display_symbol(); //显示温度说明display_dot(); //显示温度的小数点display_cent(); //显示温度的单位while(1) //不断检测并显示温度{ReadyReadTemp(); //读温度准备TL=ReadOneChar(); //先读的是温度值低位TH=ReadOneChar(); //接着读的是温度值高位TN=TH*16+TL/16; //实际温度值=(TH*256+TL)/16,即:TH*16+TL/16//这样得出的是温度的整数部分,小数部分被丢弃了TD=(TL%16)*10/16; //计算温度的小数部分,将余数乘以10再除以16取整,//这样得到的是温度小数部分的第一位数字(保留1位小数)display_temp1(TN); //显示温度的整数部分display_temp2(TD); //显示温度的小数部分delaynms(10);}}。