武大版摄影测量学重点
摄影测量学复习重点

14、相对定向完成的标志是模型点在统一的辅助坐标系中坐标U、V、W的求出。
16、4D产品是指DEM、DLG、DRG、DOM。
17、立体摄影测量基础是共面条件方程。
18、相对定向的理论基础、目的、标准是两像片上同名像点的投影光线对对相交。
1.摄影测量学的发展经过了模拟摄影测量、解析摄影测量、数字摄影测量三个阶段。
2.摄影测量按用途可分为地形摄影测量、非地形摄影测量。
3.把一条航线的航摄像片根据地物影像拼接起来,各张像片的主点连线不在一条直线上,而呈现为弯弯曲曲的折线,称航线弯曲。
4.航摄像片为量测像片,有光学框标和机械框标。
5、一张像片的外方位元素包括:三个直线元素(Xs、Ys、Zs):描述摄影中心的空间坐标值;三个角元素(φ、w、k)描述像片的空间姿态。
③而对于中心投影的航摄像片来说,不但因航高的变化会使各片的比例尺不一样,而且就同一张航片而言,由于像片倾斜和地形起伏产生的像点位移也会使各处比例尺不一致。
(2)航摄像片与地形图投影方法的差异
①地形图的投影属于正射投影(也称垂直投影),因此地形图上的地物地貌形状与实地完全相似,相关方位保持不变,各处比例尺相同。
答:摄影测量中常用的坐标系有两大类。一类是用于描述像点的位置,称为像方空间坐标系;另—类是用于描述地面点的位置.称为物方空间坐标系。
(1)像方空间坐标系
①像平面坐标系
像平面坐标系用以表示像点在像平面上的位置,通常采用右手坐标系,坐标轴的选择常用以下三种方法1、框标坐标系:是以像片上四边或四角上的框标来定义坐标系统。对于框标设在像幅四边中央的相片,通常以航线方向两边框标连线作为x轴,旁向两边框标连线作为y轴,框标连线的交点为原点。若框标设在四角上,则以对角线框标连线的夹角平分线作为x,y轴,连线交点为坐标原点;2、像平面直角坐标系:以像主点为原点,x,y轴分别平行于框标坐标系3、以主纵线为Y轴的像平面坐标系:取主纵线为y轴,指向主合点的方向为正方向,主横线或等比线为x轴。
武汉大学摄影测量课件
py Ly
100%
55
3
、
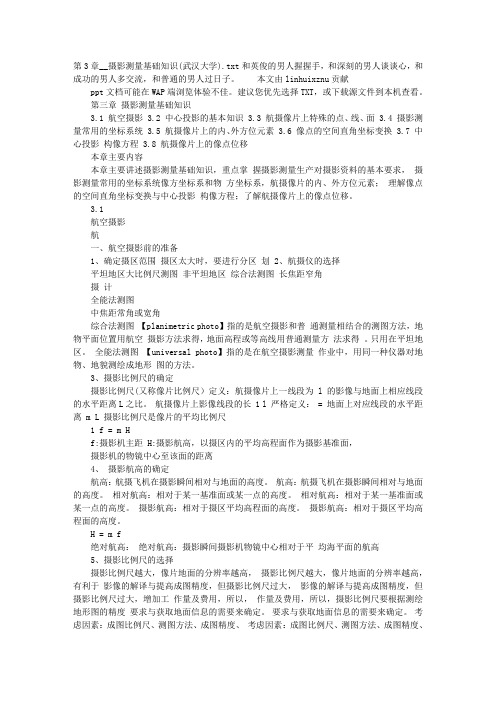
S a f P 视摄影像片水平、 地面取平均高程 时,像片上的线 段 l 与地面上相 应的水平距L 之 比为摄影比例尺
摄 影 比 例 尺
A
H
1 l f m L H
E
f为摄影机主距,H为航高
56
什么是航高?与摄影比例尺的关系?
航高:摄影机相对某一水准面的 高度。
1 f (理想情况) 相对航高:摄影机相对某一基准 m H 面的高度。(通常基准面取测区 m H 地表平均高程平面,有 ) m H H mf m 绝对航高:摄影机相对平均海水 要求 5% m 面的高度。 即 H 5% H
4
第二章 摄影的基本知识与影像误差处理
§2-1 摄影原理与摄影机
等效透镜的基本点、线、面
5
第二章 摄影的基本知识与影像误差处理
§2-1 摄影原理与摄影机
主光轴: 透镜组诸透镜球面曲率的中心连线。 主焦点(F,F’): 平行于主光轴的光线通过透镜组后 与主光轴的交点。 主平面(Q,Q’): 过等效折射点(h,h’)且垂直于主光 轴的平面。 主点(s,s’): 主平面与主光轴的交点。 主焦距: 主焦点到主点间距离。 节点(k,k’): 主光轴上角的放大率为1的一对光学 共轭点。(光线通过共轭节点时,角 放大率为1;物方与像方同介质时, k,k’分别与s,s’重合)。
小比例尺
第二章 摄影的基本知识与影像误差处理
§2-4 航空摄影及其基本要求
三、航空摄影的基本要求
1、航摄倾角:摄影主光轴与 铅垂方向的夹角
要求 3
0
50
摄影瞬间摄影机的主光轴近似与地面垂直, 偏离铅垂线的夹角小于30,夹角为像片倾角
摄影测量学复习重点
摄影测量学复习重点摄影测量学复习重点一、名词解释15(3)1.摄影测量学:利用摄影机或其他传感器采集被测目标的图像信息,进行加工处理和分析,获取有价值的可靠信息的理论和技术的学科。
2.内方位元素:把像片主距f和像主点在框标坐标系中的坐标(x0,y0)称为摄影机的内方位元素。
像片主点:摄影机主光轴与像平面的交点像片主距:摄影机物镜后节点到像片主点的垂距3.摄影比例尺:指航射影像上一线段l与相应地面线段L的水平距之比1/m=l/L=f/ H4.相对航高:摄影机物镜相对于某一基准面的高度.5.绝对航高:相对于平均海平面的航高,是指摄影物镜在摄影瞬间的真实海拔高度 H绝=H+H地6.影像的内方位元素:确定摄像机的镜头中心相对于影像位置关系的参数7. 影像的外方位元素:确定影像或摄影光束在摄影瞬间的空间位置和姿态参数.包括6个参数,其中3个是线元素,用于描述摄影中心S相对于物方空间坐标系的位置XS,YS,ZS;另外3个是角元素,用于描述摄影瞬间的空中姿态。
(1)以Y轴为主轴进行旋转的称为φ-ω-κ系统(2)以X轴为主轴进行旋转的称为φ′-ω′-κ′系统(3)以Z 轴为主轴进行旋转的称为A-α-κ系统8.像点位移:一个地面店在地面水平的水平像片上的构象与地面有起伏时或倾斜像片上构象的点位不同,这种点位差异称为像点位移。
9.单像空间后方交会:利用影像覆盖范围内一定数量的控制点的空间坐标和影像坐标,根据共线条件方程,反求该像片的外方位元素。
10.相对定向:恢复摄影时相邻两影像摄影光束的相互关系,从而使同名光线对对相交。
11.通过摄影基线S1S2与任一物方点A所作的平面WA称为通过该点A的核面,核面与影像面的交线称为核线12.空间前方交会:由立体像对中两张像片的内、外方位元素和像点坐标来确定相应地面点的地面坐标.13.立体模型的绝对定向:借助于物空间坐标为已知的控制点来确定空间辅助坐标系与实际物空间坐标系之间的变换关系14.空中三角测量:利用计算的方法,根据航摄像片上所测的像点坐标以及少量的地面控制点求出地面加密点的物方空间坐标15.采样:对实际连续函数模型离散化的量测过程被量测的点称为样点,样点之间的距离即采样间隔16.Shannon采样定理:当采样间隔能使函数g(x)中存在的最高频率中每周期取有两个样本时,则根据采样数据可以完全恢复原函数g(x).17.重采样:欲知不位于采样点上的原始函数g(x,y)的数值时需要进行内插,称为重采样18.通过零的点为边缘点,也称为零交叉点19.高斯-拉普拉斯算子:在提取边缘时,利用高斯函数先进行低通滤波,然后再利用拉普拉斯算子进行高通滤波,并提取零交叉点,这就是高斯-拉普拉斯算子或称为LOG 算子20.影像相关是利用互相关函数,评价两块影像的相似性以确定同名点。
第3章__摄影测量基础知识(武汉大学)
第3章__摄影测量基础知识(武汉大学).txt和英俊的男人握握手,和深刻的男人谈谈心,和成功的男人多交流,和普通的男人过日子。
本文由linhuixznu贡献ppt文档可能在WAP端浏览体验不佳。
建议您优先选择TXT,或下载源文件到本机查看。
第三章摄影测量基础知识3.1 航空摄影 3.2 中心投影的基本知识 3.3 航摄像片上特殊的点、线、面 3.4 摄影测量常用的坐标系统 3.5 航摄像片上的内、外方位元素 3.6 像点的空间直角坐标变换 3.7 中心投影构像方程 3.8 航摄像片上的像点位移本章主要内容本章主要讲述摄影测量基础知识,重点掌握摄影测量生产对摄影资料的基本要求,摄影测量常用的坐标系统像方坐标系和物方坐标系,航摄像片的内、外方位元素;理解像点的空间直角坐标变换与中心投影构像方程;了解航摄像片上的像点位移。
3.1航空摄影航一、航空摄影前的准备1、确定摄区范围摄区太大时,要进行分区划2、航摄仪的选择平坦地区大比例尺测图非平坦地区综合法测图长焦距窄角摄计全能法测图中焦距常角或宽角综合法测图【planimetric photo】指的是航空摄影和普通测量相结合的测图方法,地物平面位置用航空摄影方法求得,地面高程或等高线用普通测量方法求得。
只用在平坦地区。
全能法测图【universal photo】指的是在航空摄影测量作业中,用同一种仪器对地物、地貌测绘成地形图的方法。
3、摄影比例尺的确定摄影比例尺(又称像片比例尺)定义:航摄像片上一线段为l 的影像与地面上相应线段的水平距离L之比。
航摄像片上影像线段的长 1 l 严格定义: = 地面上对应线段的水平距离 m L 摄影比例尺是像片的平均比例尺1 f = m Hf:摄影机主距 H:摄影航高,以摄区内的平均高程面作为摄影基准面,摄影机的物镜中心至该面的距离4、摄影航高的确定航高:航摄飞机在摄影瞬间相对与地面的高度。
航高:航摄飞机在摄影瞬间相对与地面的高度。
5 摄影测量解析基础——【摄影测量学 武汉大学】
a25
y
f
cos
y f
(x sin
y cos )
a26
y
x
在竖直摄影的情况下,角元素都很小(<3度),各 系数可简化为:
0 sin 0 cos 1
a1 cos cos sin sin sin 1 a3 sin cos 0
Z ZS H
a11
x X s
1 Z
(a1 f
f (x)
f (x0 )
f (x0 )(x x0 )
f
(x0 2!
)
(
x
x0
)2
...
f
(
n) (x0 n!
)
(
x
x0
)n
Rn (x
Rn (x)
f (n1) ( )
(n 1)!
(
x
x0
)n1
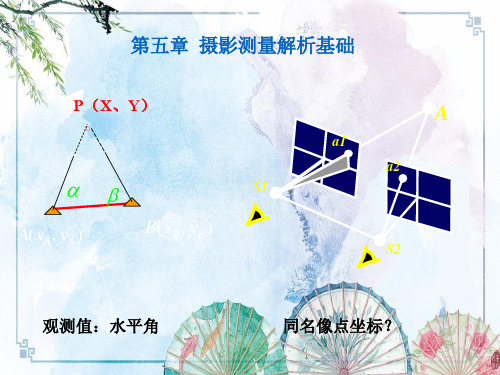
观测值:像点坐标
x
vx
(x)
x X s
dX s
x Ys
dYs
x Zs
dZs
x
d
x
d
x
d
y
vy
0
0
Y
Ys
a2
b2
c2
0
0 1 X X s
0
0
Y
Ys
1 0 0 Z Zs a3 b3 c3 1 0 0 Z Zs
a1 b1 c1 0
a2
b2
c2
0
0 0
1 a1
0
b1
a2 b2
a3 b3
X Y
a3
b3
c3 1
0
0 c1
c2
c3
摄影测量学基础知识点

摄影测量学基础知识点一、摄影测量学的基本概念。
1. 摄影测量学定义。
- 摄影测量学是对研究的对象进行摄影,根据所获得的构像信息,从几何方面和物理方面加以分析研究,从而对所摄对象的本质提供各种资料的一门学科。
简单来说,就是利用摄影像片来测定物体的形状、大小和空间位置的学科。
2. 摄影测量的分类。
- 按距离远近分。
- 航天摄影测量:利用航天器(卫星、航天飞机等)上的摄影机对地球表面进行摄影,获取大面积的影像数据,主要用于地形测绘、资源调查、环境监测等全球性或大区域的项目。
- 航空摄影测量:通过飞机等航空飞行器上的航空摄影机对地面进行摄影,是地形测绘、城市规划等中常用的测量手段,它可以获取较高分辨率的影像,覆盖范围相对航天摄影测量小,但精度较高。
- 地面摄影测量:将摄影机安置在地面上,对目标物进行摄影测量。
常用于近景摄影测量,如建筑变形监测、文物保护中的三维建模等。
- 按用途分。
- 地形摄影测量:主要目的是测绘地形图,获取地面的地形地貌信息,包括等高线、地物位置等。
- 非地形摄影测量:用于测定物体的外形、大小和运动状态等,在工业制造(如汽车外形检测)、生物医学(如人体骨骼测量)等领域有广泛应用。
3. 摄影测量的发展历程。
- 早期的摄影测量主要基于模拟摄影测量仪器,如立体测图仪等。
通过光学机械的方法,将摄影像片进行模拟处理,实现地形测绘等功能。
- 随着计算机技术的发展,进入解析摄影测量阶段。
通过建立数学模型,利用计算机解算像片上像点的坐标,提高了测量的精度和效率。
- 现在,数字摄影测量成为主流。
它以数字影像为基础,利用计算机视觉、图像处理等技术,实现自动化、智能化的摄影测量处理,如数字高程模型(DEM)生成、正射影像图制作等。
二、摄影测量的基本原理。
1. 中心投影原理。
- 摄影测量中,摄影机的镜头相当于一个中心投影的投影中心。
地面上的点在像片上的成像过程是中心投影。
- 设地面点A,摄影中心S,像点a,在中心投影下,A点发出的光线通过镜头S 后,在像平面上成像为a点。
摄影测量学(武大)01袁修孝
–
生物医学
–
–
公安侦破
古文物、古建筑
–
建筑物变形监测
§1.2 摄影测量学的发展历程
准确恢复两张影像的位置关系 快速确定两张影像上的同名点 A
a1 a2 S1
S2
摄影测量学的起源
1839年,法国人达盖尔发明摄影术为摄影测量提供了基本手段
1851 年,法国陆军上校劳赛达提出交会摄影测量并测绘了万森城堡 图,标志着摄影测量的开始
北京城市景观(亚运村)
摄影测量:分类
按距离远近
航天摄影测量 航空摄影测量 地面摄影测量 近景摄影测量 显微摄影测量 地 形摄影测量 非地形摄影测量 模拟摄影测量 解析摄影测量 数字摄影测量
按 用
途
按处理手段
摄影测量与遥感:平台
遥感平台 航天飞机 无线电探空仪 超高度喷气机 中低高度飞机 飞艇 高度 240~350km 100m~100km 10000~12000m 500~8000m 500~3000m 目的、用途 不定期地球观测、空间实验 各种调查(气象等) 侦察、大范围调查 各种调查、航空摄影测量 空中侦察、各种调查 其它
DLG
DRG
DOM
P31摄影经纬仪近景影像
航空光学影像
ADS40数字航空影像
摄影测量学:定义
各种类型 传感器 被摄物体 影 像
通过量测和 解译过程
自然物体及其环境的可靠信息
DEM
DLG
DRG
DOM
正射影像图
三峡正射影象图:三条航带 、175张航空影像
三维景观图
三峡景观图:三条航带 、175张航空影像
Archive system
Visualization Image analysis
摄影测量学复习重点

1、摄影测量发展的三个阶段是:模拟摄影测量、解析摄影测量和数字摄影测量2、共线方程相当于投影过程,即由物方经摄影中心到像方的过程3、像片判读按其应用目的可分为地形判读和专业判读,按其使用的技术手段可分为间接判读和直接判读。
4、绝对定向的目的是将建立的模型坐标纳入到地面坐标系中,并规划为规定的比例尺5、等比线把倾斜相片的比例尺分为三部分,含主点部分的比例尺都小于f/h,含底点部分的比例尺都大于f/h,而本身的比例尺等于f/h6、双像解析空中三角测量常用的方法主要有航带网法、独立模型区域网法、光束法三种7、投影的方式有中心投影和正摄投影,航空像片属于中心投影8、一个像对的两张像片有12个外方位元素,其中通过相对定向可以求得5个相对定向元素,要恢复像对的绝对位置还需要求解7个绝对定向元素9、像点坐标观测值主要包含摄影物镜畸变差、大气折光差、感光材料变形、地球曲率等造成的系统误差10、在摄影测量中进行立体模型量测时,可以用两种量测方法,这两种量测方法分别为单侧标量测和双侧标量测11、摄影测量常用的坐标系有像平面坐标系、像空间坐标系、像空间辅助坐标系和摄影测量坐标系、地面测量坐标系12、摄影测量双像解析求解物点的三维空间坐标的方法有三种,其分别是:单张像片的空间后方交会和立体像对的空间前方交会、相对定向和绝对定向和光束法13、相对定向的目的是建立一个与被摄物体相似的几可模型,以确定模型点的三维坐标14、在摄影测量的坐标变换中有三种转角系统,其中以V轴为转角系统的三个外方位元素分别是航向倾角、旁向倾角和像片旋偏角15、立体像对的观察中,人造立体效应应有正立体效应、反立体效应和零立体效应三种16、航摄像片的投影方式为中心投影,地形图的投影方式为正射投影17、像片纠正按其使用的方法和原理不同可分为:光学机械纠正、光学微分纠正和数学微分纠正18、在构建航带模型的过程中,进行模型连接的目的是建立统一的自由航带网19、反解法数学微分纠正的实现步骤包括计算地面点坐标、计算像点坐标、灰度内插和灰度赋值20、像片判读的判读特征主要有:形状、大小、阴影、纹理、色调、图案、相关布局等七个21、摄影测量外业工作任务有野外测定一定数量的控制点和像片解译与调绘22、像控点的刺孔不得超过0.1mm,并且要刺穿透亮,不允许有双孔出现像片的内方位元素:确定摄影物镜后节点相对于相片平面关系的数据像片的外方位元素:恢复像片内方位元素的基础上,确定像片摄影瞬间在地面坐标系中空间位置和姿态的参数航向重叠度:摄影时,要求沿航线飞行方向两相邻像片对所摄地面有一定的重叠影像,这种重叠称为航向重叠。
武汉大学《摄影测量学》复习题库
熟悉 1818 立体坐标量测仪的基本结构,立体观察,坐标量测。 左右视差(p)读数鼓
上下视差(q)读数鼓
x 读数鼓
x 手轮 y 手轮
3. 资料准备
一个 18cm×18cm 的立体影像对
y 读数鼓
左右视差手轮 上下视差环
左像片
右像片
4. 操作步骤
仪器归零:各个手轮应放在零读数位置上,左、右测标分别对准左、右像片盘的中心即仪器 坐标系与像片坐标系重合。
Z 2195.17
728.69 2386.50
757.31
4. 操作步骤
上机调试程序并打印结果。
“POS 辅助光束法平差系统 WuCAPS”使用
1. 目的
通过参观 POS 辅助光束法区域网平差程序系统 WuCAPS,使学生初步了解摄影测量区域网平差 的基本功能和一般作业流程。
2. 内容
指导教师讲解摄影测量区域网平差的基本概念、主要功能及一般作业流程。学生按照要求,完 成一些简单的操作,例如,内定向、相对定向、绝对定向、航带法区域网平差、光束法区域网平差、 GPS 辅助光束法区域网平差、POS 辅助光束法区域网平差等。
像片定向:移动 x 手轮,单眼观察测标的移动看是否沿像片上的 x 轴向运动,若测标不在 x 轴向上,则需要用κ 螺旋旋转像片,使测标保持在 x 轴上移动。
坐标量测:移动 x,y,p,q 手轮,使测标立体切准量测像点,并记下相应读数鼓上的读数。 坐标计算:x1=x-x0,y1=y-y0,x2=x1-(p-p0),y2=y1-(q-q0),其中,x0,y0,p0,q0为仪器零位置。
的方法?
5. 什么是共线条件方程式?试推导其数学表达式,并说明它在摄影测量中的应
用。
摄影测量学 考试重点 整理精华
1、摄影测量学的定义:摄影测量学是对研究的物体进行摄影、量测和解译所获得的影像,获取被摄物体的几何信息和物理信息的一门科学和技术。
2、摄影测量学的分类:(1)按照摄影机所处位置不同:地面摄影测量、航空摄影测量和航天摄影测量。
(2)根据应用领域不同:地形摄影测量和非地形摄影测量。
(3)根据技术处理手段不同:模拟摄影测量、解析摄影测量和数字摄影测量。
3、摄影测量学敬礼的发展阶段:模拟摄影测量、解析摄影测量、数字摄影测量4、光圈:由一组金属片组成,呈莲花瓣状,通过手动或自动可以调节中国建透光部分的大小,即相当于调节镜头的直径。
光圈是衡量镜头能通过光线多少的重要参数。
一方面可以调节物镜适用面积的大小,另一方面可以调节进入物镜的光亮。
5、光圈号数:有效孔径与物镜焦距之比,称为相对孔径δ/f 。
相对孔径的倒数f/δ称为光圈号数,用κ表示。
6、景深:被摄景物中能产生较为清晰影像的最近点至最远点的距离。
7、量测用摄像机与非量测用摄像机相比,量测用摄像机具有以下特点:(1)量测用摄像机的像距是一个固定的已知值。
(2)量测用摄像机承片框上具有框标。
(3)量测用摄像机内方位元素值是已知的。
8、黑白片的摄影处理过程包括:显影、定影、水洗和干燥等步骤。
9、显影过程是利用显影剂的还原作用,将胶片上已经感光的卤化银还原成金属银,使感光材料曝光生成的潜像变为可见影像。
10、定影:利用定影液溶解去除感光材料显影后残留的卤化银,使其不再有感光性能的过程,称为定影。
11、摄影比例尺:是指航摄设计中的像片比例尺。
像片比例尺是由摄影机的主距和摄影的高度来计算的。
即1/m=f/H,式中:m为像片比例尺分母,f为摄影机主距,H为摄影高度或航高。
12、航高是指摄影飞机在摄影瞬间相对于某一水准面添加得高度,从该水准面起算向上符号为正。
13、像片重叠度:为了便于室内例题观察和像片连接,摄影测量要求使用的航摄像片必须具有重叠部分,这种重叠包括航向重叠和旁向重叠。
(整理版)摄影测量学(武大)07袁修孝

卫星遥感技术
卫星遥感技术是利用卫星搭载的 传感器获取地球表面信息的一种
技术。
卫星遥感技术具有覆盖范围广、 信息量大、实时性强等特点,广 泛应用于环境监测、城市规划、
资源调查、气象预报等领域。
卫星遥感技术包括卫星平台、传 感器、数据处理和信息提取等多 个环节,能够提供多尺度、多分
辨率的地理信息数据。
(整理版)摄影测量学(武大)07袁修 孝
contents
目录
• 摄影测量学概述 • 摄影测量学的基本原理 • 摄影测量学的技术与方法 • 摄影测量学的实践与应用 • 摄影测量学的未来发展与挑战
01 摄影测量学概述
摄影测量学的定义与特点
摄影测量学的定义
摄影测量学是一门通过分析摄影影像获取目标几何和物理信息的一门科学。它 利用摄影影像获取目标的三维坐标、形状、大小、运动状态等信息,经过处理 和解析,为各领域提供可靠的数据支持。
提高摄影测量学的精度与效率的方法
优化算法和技术
不断研究和优化摄影测量的算法和技术,提高数据处理和分析的 精度和效率。
多平台和多角度观测
利用多种平台和多角度观测技术,获取更加全面的数据信息,提高 测量精度。
集成化数据处理
将摄影测量与其他相关技术进行集成,形成一套完整的数据处理和 分析系统,提高工作效率。
THANKS FOR WATCHING
感谢您的观看
土地资源调查中的应用
01
02
03
土地利用调查
摄影测量技术能够快速获 取大范围土地的利用现状, 为土地资源管理和规划提 供基础数据。
土地变更监测
通过定期的摄影测量,可 以监测土地利用的变化情 况,及时发现非法占用和 破坏土地资源的行为。
武大版摄影测量学重点

摄影测量学第一章绪论1、基础地理信息类型传统得 4D 数据DLG-Digital Line Graphic,数字线化图DEM -Digital Elevation Model,数字高程模型 DOM - Digital Orthophoto Map,数字正射影像 DRG - Digital Raster Graphic,数字栅格地图 2、传统得摄影测量学就是利用光学摄影机获取得像片,通过像片来研究与确定被摄物体得形状、大小、位置、性质及其相互关系得一门科学技术。
3、摄影测量与遥感就是对非接触传感器系统获得得影像进行记录、量测、分析与表达,从而获得地球及其环境与其它物体得可靠信息得一门工艺、科学与技术。
4、摄影测量就是影像信息得获取、处理、提取与成果表达得一门信息科学。
5、摄影测量得任务:(1)地形测量领域:各种比例尺得地形图、专题图、特种地图、正射影像地图、景观图;建立各种数据库; 提供地理信息系统与土地信息系统所需要得基础数据(2)非地形测量领域生物医学、公安侦破、交通事故、勘察古文物、古建筑建筑物、变形监测、工业摄影测量、环境监测6、摄影测量得特点�无需接触物体本身获得被摄物体信息�由二维影象获取对象得空间三维信息�面采集数据方式,信息丰富逼真�同时提取物体得几何与物理信息7、摄影测量学得三个发展阶段(1) 模拟摄影测量阶段(1851-1970)•利用光学/机械投影方法实现摄影过程得反转,用两个/多个投影器模拟摄影机摄影时得位置与姿态构成与实际地形表面成比例得几何模型,通过对该模型得量测得到地形图与各种专题图(2) 解析摄影测量阶段(1950-1980)以电子计算机为主要手段,通过对摄影像片得量测与解析计算方法得交会方式来研究与确定被摄物体得形状、大小、位置、性质及其相互关系,并提供各种摄影测量产品得一门科学(3) 数字摄影测量阶段(1970-现在) 基于摄影测量得基本原理,通过对所获取得数字/数字化影像进行处理,自动(半自动)提取被摄对象用数字方式表达得几何与物理信息,从而获得各种形式得数字产品与目视化产品8、摄影测量三个发展阶段得特点9、影像信息学影像信息学就是一门记录、存储、传输、量测、处理、解译、分析与显示由非接触传感器影像获得得目标及其环境信息得科学、技术与经济实体。
摄影测量学(武大)01袁修孝共58页
摄影测量学(武大)01袁修孝
16、自己选择的路、跪着也要把它走 完。 17、一般情况下)不想三年以后的事, 只想现 在的事 。现在 有成就 ,以后 才能更 辉煌。
18、敢于向黑暗宣战的人,心里必须 满光 明。 19、学习的关键--重复。
20、懦弱的人只会裹足不前,莽撞的 人只能 引为烧 身,只 有真正 勇敢的 人才能 所向披 靡。
66、节制使快乐增加并使享受加强。 ——德 谟克利 特 67、今天应做的事没有做,明天再早也 是耽误 了。——裴斯 泰洛齐 68、决定一个人的一生,以及整个命运 的,只 是一瞬 之间。 ——歌 德 69、懒人无法享受休息之乐。——拉布 克 70、浪费时间是一桩大罪过。——卢梭
摄影测量学知识点

摄影测量学知识点第一章绪论1、摄影测量学-----是对研究物体进行摄影、量测和解译所获得的影象,获取被摄物体的几何信息和物理信息的一门科学和技术。
摄影测量的特点⏹1、在影像上量测,无需接触物体本身,因此很少受自然地理等条件的限制。
⏹2、影象是客观事物的真实反映,信息丰富,可选择需要的物体影象进行量测、处理、研究,从影象上获得最新最全面的几何或物理信息。
⏹3、摄影测量大部分工作在内业进行,有利于自动化、数字化、智能化,工作效率高。
摄影测量分类按摄影站的位置:航天摄影测量、航空摄影测量、地面摄影测量显微摄影测量、水下摄影测量按研究对象不同:地形摄影测量、非地形摄影测量按处理技术手段:模拟摄影测量、解析摄影测量、数字摄影测量摄影测量学的三个发展阶段⏹模拟摄影测量阶段(1851-1970)⏹解析摄影测量阶段(1950-1980)⏹提出摄影测量新概念——数字投影代替物理投影⏹数字摄影测量阶段(1970-现在)第二章摄影测量解析基础中心投影的正片位置和负片位置a)负片位置:投影平面和物点位在投影中心的两侧b)正片位置:投影平面和物点位在投影中心同一侧c)摄影时的位置是负片位置,解算时的位置是正片位置,为了解算的方便,像点和物点之间的几何关系并没有改变;摄影比例尺d)摄影比例尺指摄影像片上一线段为l与地面上相应线段的水平距L之比e)航摄比例尺----指水平像片,地面取平均高程时, 像片上的一线段Z与地面上相应线段的水平距L之比摄影仪摄影的要求摄影方式竖直摄影:摄影瞬间摄影机的主光轴近似与地面垂直摄影航高:H=m•f摄影重叠度f)重叠摄影部分与整个像幅长的百分比称为重叠度g)航向重叠p----同一条航线内相邻像片之间的影像重叠h)旁向重叠q---相邻航线的重叠P=60~65%q=30~35%摄影比例尺特性•1 )摄影比例尺愈大,则像片地面分辨率越高,有利影像的解译与提高成图的精度。
•2) 摄影比例尺愈大,则摄影工作量增加,摄影费用要增多,所以摄影比例尺要根据信息采集的精度确定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
7、航空摄影与航空摄影机 � 航空摄影的航摄仪主要选用量测摄影机,量测摄影机与普通摄影机相比,具有如下 三个特征: (1)像距是一个固定的已知值,且等于摄影机的主距 f (2)摄影机获取的像片上有框标标志 (3)摄影机的内方位元素( x0 ,y0 ,f)是已知的 8、摄像机的参数 航摄机主距:物镜中心到像片平面(位于焦点处)的距离,也叫做像片主距 像片框标:像框平面上的框标标志在像片上的成像,在框架中点的机械标志叫机械框标, 在框架的四个角偶上的记号叫光学框标 内方位元素:摄影机主光轴与像平面的交点称为像片主点。由于制造技术上的误差,导致 像片主点与框标坐标系原点(框标连线的交点)不重合。像片主点在框标坐标系中的坐标 值(x 0,y0 )与像片主距 f ,被称为摄影机的内方位元素,或像片的内方位元素
9、影像信息学 影像信息学是一门记录、存储、传输、量测、处理、解译、分析和显示由非接触传感器 影像获得的目标及其环境信息的科学、技术和经济实体。 10、影像的获取航空 影像的获取:航空摄影测量主要使用专用的量测航空摄影机 航天影像的获取:各种遥感影像卫星 近景影像的获取:各种量测及非量测相机 第二章 摄影测量基础知识 1、建立摄影测量坐标系的目的 � 摄影测量学的基本任务是根据像点的位置确定地面得点位置 � 像点和地面点需要在不同的坐标系下定量描述其位置 � 通过坐标变换式,建立像点坐标到地面点坐标的映射关系 2、 摄影测量使用两类坐标系 (1)像方坐标系:用于描述像点的平面或空间位置 � 1、像平面上的直角坐标系 � 2、像空间直角坐标系 (S-xyz) � 3、 像空间辅助坐标系 (S-uvw) 目的:像空间坐标系是从像平面坐标系得 到的,造成各像片的像空间坐标系不统一,给计算带来困难;为了统一不同 像片的像空间坐标系,建立一种相对统一的坐标系 S-uvw (2)物方坐标系:用于描述地面点的平面或空间位置 � 1、地面测量坐标系 ( T- Xt Yt Zt) 地面测量坐标为国家统一坐标系,平面坐 标系为高斯 -克吕格三度带或六度带 1980 西安坐标系、 或 1954 北京坐标系, 高程坐标系为 1956 黄海高程系或 1985 黄海高程系 � 2、 地面摄影测量坐标系(D-XYZ) 像空间直角坐标系是右手坐标系,地面 测量坐标系是左手坐标系, 为了坐标转换的方便, 在两者之间建立一种过渡 性的坐标系。 � 3、 摄影测量坐标系(p-XpYpZp) 将像空间直角坐标系沿 w 轴反向平移到 地面上某一点 p 上所构成的地面直角坐标系 3、像片的方位元素 – 描述航空摄影瞬间摄影中心和像片在地面设定的空间坐标系中的位置和姿 态参数; – 方位元素有内方位元素、外方位元素 像片的内方位元素:描述摄影物镜后节点( 摄影中心) 与像片之间相互位置的参数,内方位元 素包括三个参数:摄影中心 S 到像片的垂距(主距) f,及像主点 o 在像片框标坐标系中的 坐标 x0 ,y 0
像片外方位元素:在恢复内方位元素的基础上,确定摄影光束在地面直 角坐标系(一般为地面摄影测量坐标系)中空间位置 和姿态的参数。 4、理想像片:对于水平的平坦地区,若能摄取一张水平像片,由于像片与地面平行,则像 片上任意两像点间的距离与相应地面点间的水平距离之比为一常数,即摄影比例尺 f/H , 且 在此像片上任一点引画的两条方向线间的夹角等于地面上对应的水平角,则这样的像片可 作为地形图使用,称为理想像片。 5、像点位移:当像片倾斜、地面起伏时,地面点在航摄像片上构像相对于理想情况下的构 像所产生的位置差异称像点位移 6、像点位移规律
摄影测量学 第一章 绪论 1、 基础地理信息类型传统的 4D 数据 DLG-Digital Line Graphic,数字线化图 DEM -Digital Elevation Model,数字高程模型 DOM - Digital Orthophoto Map ,数字正射影像 DRG - Digital Raster Graphic,数字栅格地图 2、 传统的摄影测量学 是利用光学摄影机获取的像片,通过像片来研究和确定被摄物体的形状、大小、位置、性 质及其相互关系的一门科学技术。 3、 摄影测量与遥感 是对非接触传感器系统获得的影像进行记录、量测、分析和表达,从而获得地球及其环境 和其它物体的可靠信息的一门工艺、科学和技术。 4、摄影测量是影像信息的获取、处理、提取和成果表达的一门信息科学。 5、摄影测量的任务: (1)地形测量领域:各种比例尺的地形图、专题图、特种地图、正射影像地图、景观图 ;建立各种数据库; 提供地理信息系统和土地信息系统所需要的基础数据 (2)非地形测量领域 生物医学、公安侦破、交通事故、勘察古文物、古建筑建筑物、变形监测、工业摄影测量、 环境监测 6、摄影测量的特点 � 无需接触物体本身获得被摄物体信息 � 由二维影象获取对象的空间三维信息 � 面采集数据方式,信息丰富逼真 � 同时提取物体的几何与物理信息 7、 摄影测量学的三个发展阶段 (1) 模拟摄影测量阶段 (1851-1970) • 利用光学/机械投影方法实现摄影过程的反转,用两个 /多个投影器模拟摄影机摄影 时的位置和姿态构成与实际地形表面成比例的几何模型,通过对该模型的量测得到 地形图和各种专题图 (2) 解析摄影测量阶段 (1950-1980) 以电子计算机为主要手段,通过对摄影像片的量测和解析计算方法的交会方式来研 究和确定被摄物体的形状、大小、位置、性质及其相互关系,并提供各种摄影测量 产品的一门科学 (3) 数字摄影测量阶段 (1970- 现在) 基于摄影测量的基本原理,通过对所获取的数字/数字化影像进行处理,自动(半自 动)提取被摄对象用数字方式表达的几何与物理信息,从而获得各种形式的数字产 品和目视化产品 8、 摄影测量三个发展阶段的特点
第五章 解析空中三角测量 1、解析空中三角测量 按航线或区域网将空中摄站及像片的空间位置和姿态放到整个网中 , 采用严 密的数学模型,用少量的地面控制点为平差条件,按最小二乘法原理,统一 解算测图所需控制点的地面三维坐标, 称之为空中三角测量, 亦称解析空三 加密。 2、解析空中三角测量的意义 � 不触及被量测目标即可测定其位置和几何形状 � 可快速地在大范围内同时进行点位测定,以节省野外测量工作量 � 不受通视条件限制 � 区域内部精度均匀,且不受区域大小限制 除为双像测图工序提供大量的控制点坐标外,还可提供内业测图工序所需的各种数据和一 系列副产品,如每张像片的绝对倾角、摄站点坐标、相对定向元素、绝对定向元素等。 3、解析空中三角测量的应用 � 为立体测绘地形图、制作影像平面图和正射影像图提供定向控制点和像片定向参数 (内、外方位元素) � 取代大地测量的方法,进行三、四等或等外三角测量的点位测定(要求精度厘米级) � 地籍测量中测定大范围内界址点的国家统一坐标,以建立坐标地籍(要求精度厘米 级) � 单元模型中大量地面点坐标的解析计算 � 解析近景摄影测量,如建筑物变形测量、工业测量及用影像重建物方目标等。 4、 航带网法区域网平差步骤 � 按单航带模型法分别建立航带模型,并计算各航带模型点在本航带统一的辅助坐标 系中的坐标; � 各航带模型的绝对定向 – 从第一航带开始, 利用本航带的已知控制点和相邻航带的公共点进行绝对定 向, 将各航带网纳入到统一的坐标系中, 并求出区域内各航带模型点在全区 域统一的地面摄影测量坐标系下的概略坐标。
对定向元素 通过将相对定向模型进行缩放、平移和旋转,使其达到绝对位置 原理:绝对定向是利用已知的地面控制点,对立体模型进行空间相似变换,解求 7 个绝 对定向元素 7、双像解析的相对定向-绝对定向解析方法步骤 综合立体像对的相对定向和绝对定向过程,可得到双像解析的相对定向-绝对定向解析方 法步骤: � 采用连续像对或单独像对的相对定向元素的误差方程式解算相对定向元素; � 由相对定向元素组成左、右像片的旋转矩阵 R1、R2,并利用前方交会式求出模型点 在像空间辅助坐标系中的坐标; � 根据已知地面控制点,按绝对定向元素的误差方程式解算该立体模型的绝对定向元 素; � 按绝对定向公式,将所有待求点的坐标纳入到地面摄影测量坐标系中; � 将待求点的地面摄影测量坐标系下的坐标改化到地面测量坐标系下,提交成果。
5、
5、体像对的空间前方交会 由立体像对中两张像片的内、外方位元素和像点坐标来确定相应地面点在物方空间坐标系 中坐标的方法,称为立体像对的空间前方交会。 6、解析相对定向的概念 确定一个立体像对两像片的相对位置,称为相对定向。相对定向的目的:确定立体像对 两张像片相对位置和姿态,建立一个与拍摄物体相似的立体模型,以确定模型点的三维坐 标。 相对定向元素:确定立体像对两张像片相对位置和姿态关系的参数。 利用立体像对中摄影时存在的同名光线对应相交的几何关系,通过量测像点坐标,以解 析计算的方法(此时不需要野外控制点) ,解求两像片的相对定向元素值的过程,称之为解 析相对定向。 6、 绝对定向元素 描述相对定向所建立的立体模型的比例尺和空间方位(绝对位置和姿态)的参数称作绝
第四章 摄影测量解析基础 1、立体坐标量测步骤 � 仪器归零:各个手轮应放在零读数 (x 0,y0,p 0,q0 )位置上,左、右测标分别对准左、
பைடு நூலகம்
右像片盘的中心,再使左、右像片框标连线的交点分别与左、右测标重合,即像片 归心——仪器坐标系原点与像片坐标系原点重合 � 像片定向:使仪器坐标轴系与像平面坐标轴系平行。移动 X 手轮,单眼观察测标的 移动看是否沿像片上的 x 轴向运动, 若测标不在 x 轴向上, 则需要用 κ螺旋旋转像片, 使测标保持在 x 轴上移动 � 像点量测:移动 X,Y,p,q 手轮,使测标立体切准量测像点,并记下相应读数鼓 上的读数 x ,y,p ,q � 坐标计算: x a=x -x 0, ya=y-y0; x a’ =xa-( p-p 0) , ya’=ya-( q- q0 ) 2、单张像片的空间后方交会 利用航摄像片上三个以上的像点坐标和其对应的地面点坐标,根据共线条件方程求解像片 外方位元素的工作,称为单张像片的空间后方交会。 3、 双像解析摄影测量 根据获取的立体像对的内在几何特性,按照物点、摄影中心与像点构成的几何关系,用解 析计算方法获取地面的基础地理信息(点的三维空间位置、几何信息) 。 4、 双像解析摄影测量的方法及比较