串联系统的多前馈—反馈广义预测控制
第五章2 前馈-反馈控制系统PPT课件

1.静态前馈控制
所谓静态前馈控制,是指前馈调节器的输出量仅仅是其输入量的函数.与时间因 子无关。前馈调节器的控制规律具有比例特性,
其大小可根据过程扰动通道的静态放大系数和过程控制通道的静态放大系数来决定。 静态前馈控制只考虑最终稳态时的校正,所以只能使被控参数最终的静态偏差接
Kf
T1s 1 es 的微分表示形式为:
T2s 1
T2
du f (t) dt
uf
(t)
K
f
[T1
dF (t dt
)
F (t
)]
用差分方程来代替微分方程时:
Ts:采用周期。
du f (t) dt
|t kTs
u
f
(k)
dF (t dt
f
)
|t kTs
F (k
1
df ) Ts
F (k
则有:
Wf (s) K f
KdT1s T1s 1
1
T2s 1 KdT2s
1
K
f
T1s 1 T2s 1
在DDZ-Ⅲ型仪表和组装仪表中,上述前馈模型都有相应的硬件模块。为前馈-反 馈控制的广泛应用提供了方便。
Kf
T1s 1 e s 型前馈控制器 T2s 1
采用该种前馈模型的较少。
东北大学
3.数字仪表实施
/ T2 )
1
(
1 a
1)et
aT1
,这里
a
T1
T2
东北大学
当a>1,T1>T2, 前馈补偿器具有滞后性,适用于控制通道滞后小于干扰通道的场合; 当a<1,T1<T2, 前馈补偿器具有超前性,适用于控制通道滞后大于干扰通道的场合。
串级控制综述和预测控制结合
串级控制综述和预测控制结合
串级控制和预测控制是两种常见的控制策略,可以在不同层次上对系统进行控制和优化。
下面是它们的简要综述和结合方式:
串级控制是指在系统中采用多个控制回路,其中一个回路的输出作为下一个回路的输入。
这种控制策略通常用于复杂的工业过程中,如化工、电力等。
通过将系统分为多个级别,可以更好地管理和调节系统的各个方面,提高系统的控制性能。
预测控制是一种基于模型预测的控制策略,通过建立系统的动态数学模型,使用预测算法来预测系统未来的状态,并根据预测结果制定控制策略。
预测控制通常适用于具有非线性、时变性质的系统,并且对于系统的变化具有较好的适应性和鲁棒性。
将串级控制和预测控制结合可以充分发挥它们各自的优势,进一步提高系统的控制性能。
具体做法可以是在串级控制的基础上引入预测模型和预测算法,通过预测未来的系统状态进行更精确的控制。
例如,可以将系统的当前状态和预测的未来状态作为串级控制器的输入,以实现更优化的控制。
总之,串级控制和预测控制结合可以使系统在复杂、非线性环境下具有更好的控制性能和鲁棒性。
但具体的实施方法需要根据系统的特点和需求进行具体设计和调整。
反馈控制与前馈控制
反馈控制与前馈控制在控制工程领域,反馈控制和前馈控制是两种常见的控制策略。
它们在不同的系统中发挥着关键作用,具有各自的优点和适用范围。
本文将探讨反馈控制和前馈控制的基本原理、特点和应用。
一、反馈控制的基本原理和特点反馈控制是一种通过监测系统输出并与期望输出进行比较,然后根据比较结果对系统进行调整的控制方法。
其基本思想是不断地纠正系统输出与期望输出之间的误差,以保持系统稳定和精确。
反馈控制的基本原理可以用闭环系统来描述,其中包括传感器、比较器、控制器和执行器等组件。
具体而言,在闭环系统中,传感器用于监测系统的输出,并将输出信号传递给比较器。
比较器将系统的输出信号与期望输出进行比较,并生成误差信号。
控制器将误差信号与系统的参考模型进行比较,并根据比较结果生成控制信号。
最后,执行器接收控制信号,并对系统进行调整,以使输出尽可能接近期望输出。
反馈控制具有以下特点:1. 稳定性:通过反馈迭代调整,反馈控制可以使系统保持稳定,抵抗外界干扰。
2. 自适应性:反馈控制可以根据系统输出的实时变化情况来调整控制信号,以适应不同的工作条件。
3. 鲁棒性:反馈控制对于系统内部参数变化或外界扰动具有一定的鲁棒性,能够保持较好的控制效果。
4. 相对简单:相比于前馈控制,反馈控制的设计和实现相对简单,适用于许多实际系统。
二、前馈控制的基本原理和特点前馈控制是一种基于系统输入与期望输出之间的关系,预先对系统进行控制信号的加法和乘法计算,从而直接实现期望输出。
其基本思想是通过提前预测系统的行为来控制系统,而无需依赖系统的实际输出。
前馈控制的基本原理可以用开环系统来描述,其中包括发生器、执行器和系统模型等组件。
具体而言,在开环系统中,发生器生成预先计算好的控制信号,并将其传递给执行器。
执行器根据控制信号执行相应的操作,并将结果输入到系统模型中。
系统模型对输入进行运算,并生成系统的输出。
通过预先计算好的控制信号,系统的输出可以直接达到期望输出。
前馈控制系统、反馈控制系统
摘要可编程序控制器(PLC)是一种集自动化技术、计算机技术和通信技术为一体的高可靠性的工业计算机,应用很广泛,现在已经越来越成熟,小批量、多品种、多规格、低成本和高质量的产品不断涌入市场。
本设计主要是在西门子编程软件S7-300的基础上实现PLC的前馈反馈系统的设计,并通过具体的实例,即对加热炉温度的前馈反馈控制的实现来说明前馈反馈的具体流程。
加热炉内的实时温度经过温度传感器、温度变送器将模拟量传送给PLC的模拟量输入模块,模拟量输入模块将模拟量转换成数字量送到PLC内部处理,再由模拟量输出模块将数字量转换为模拟量输出控制阀门的开度以达到炉内温度稳定的控制。
本文研究的重点是如何用PLC以及WinCC对现场的前馈-反馈控制系统进行控制的,如何将前馈-反馈控制系统得到的数据经过PLC 后传送到上位机,用组态软件WinCC进行实时监控。
经仿真运行后,本系统能实现控制要求。
关键字:前馈-反馈控制;可编程控制器;WinCC;加热炉AbstractProgrammable Logic Controller (PLC) is a set of automation technology, computer technology and communication technology as one of the high reliability industrial computer,and PLC is widely used. Now it is more and more mature,smaller quantities, more kinds ,lower cost and higher quality in the market. This design is abased on the programming software of Siemens to implement PLC-based feedforward-feedback control system. This design introduces an example to explain the procedure of feedforward-feedback system. The example is that through temperature control in heating furnace which is used feedforward and feedback control system.Real-time temperature, inside the furnace, after the temperature sensors, temperature transmitters discovered will be sent to the analog input module of PLC. Analog input modules convert analog to digital, and sent the digital data to CPU of PLC to process. Then analog output modules convert digital to analog to control valve, so the system achieves a stable furnace temperature control. Focus of this study is about that how to use PLC and WINCC to control feedforward-feedback system of on-scene, and how to make feedforward-feedback system convey the date to computer via PLC, then, using configuration software Wincc implement real-time monitoring.Keywords:feedforward-feedback;Programmable Logic Controller; WinCC;heating furnace目录1 绪论 (1)1.1 国内外研究现状 (1)1.2 本课题研究内容及方法 (2)2 基于PLC的双闭环流量比值控制系统设计 (3)2.1 系统的工艺流程 (3)2.2 控制系统的硬件选型 (4)2.2.1 PLC的发展及特点 (4)2.2.2 PLC的内部结构 (5)2.2.3 西门子公司的S7系列PLC (7)2.2.4 CPU的选型 (8)2.2.5 I/O模块的选型 (8)2.2.6 电源模块的选型 (9)2.3 系统各部分硬件选型 (9)2.3.1 温度传感器的选择 (10)2.3.2 温度变送器的选择 (10)2.3.3 流量计与压力变送器的选择 (10)2.4 软件设计方案 (11)2.4.1 STEP 7编程软件的简介 (11)2.4.2 系统控制方案的选择 (11)2.4.3 加热炉前馈-反馈系统控制流程图 (12)2.4.4 PID控制及其控制算法 (13)2.5 程序的编写 (15)3 WinCC组态与仿真 (20)3.1 新建工程 (20)3.2 建立Wincc与PLC的通信连接 (21)3.3 创建供料系统的过程画面 (25)3.3.1 创建画面 (25)3.3.2 仿真结果 (27)结束语 (33)致谢 (35)参考文献 (36)附录 (37)1.完整程序 (37)2.整体仿真画面 (42)1 绪论1.1 国内外研究现状现代社会要求生产厂商能对市场的需求做出迅速反应,生产出小批量、多品种、多规格、低成本和高质量的产品。
说明前馈控制与反馈控制各自的优缺点

说明前馈控制与反馈控制各自的优缺点前馈控制与反馈控制是控制系统中常用的两种控制方法。
它们各自具有一些优点和缺点,本文将对这两种控制方法进行详细说明。
一、前馈控制的优点:1. 响应速度快:前馈控制是根据预测模型进行控制,可以提前预测系统的变化趋势,因此能够快速响应外部干扰或参考信号的变化。
2. 稳定性好:前馈控制可以有效抑制系统的不稳定因素,提高系统的稳定性。
通过提前补偿干扰或参考信号,可以减小系统的误差,使系统更加稳定。
3. 控制精度高:前馈控制可以根据预测模型精确地计算出控制信号,避免了传统反馈控制中由于传递函数等原因引起的误差积累,从而提高了控制精度。
4. 抗干扰能力强:前馈控制可以提前补偿系统的干扰,减小干扰对系统的影响,从而提高系统的抗干扰能力。
二、前馈控制的缺点:1. 对系统模型的要求高:前馈控制需要准确的系统模型作为基础,如果系统模型存在误差或不准确,将会导致控制效果下降甚至失效。
2. 对干扰的预测能力有限:前馈控制是根据预测模型进行控制,对于无法准确预测的干扰或非线性因素,前馈控制的效果会受到限制。
3. 对系统参数的变化敏感:前馈控制的控制策略是基于系统模型的,一旦系统参数发生变化,需要重新设计前馈补偿器,对于参数变化频繁或不确定的系统,前馈控制的应用会受到限制。
三、反馈控制的优点:1. 对系统模型的要求低:反馈控制是根据系统的实际输出进行控制,不需要准确的系统模型作为基础,因此适用范围更广。
2. 适应性强:反馈控制可以根据系统的实际输出进行调整,能够适应系统参数变化和干扰的影响,具有较好的适应性和鲁棒性。
3. 控制效果稳定:反馈控制能够通过不断调整控制器的参数,使系统的输出逐渐趋近于参考信号,从而实现稳定的控制效果。
4. 易于实现和调试:反馈控制不需要准确的系统模型和预测算法,通常可以通过实验和试错的方式进行参数调试,具有较好的实用性和可操作性。
四、反馈控制的缺点:1. 响应速度较慢:反馈控制依赖于系统的实际输出,需要等待系统的响应,因此相对于前馈控制而言,响应速度较慢。
前馈控制和反馈控制
前馈控制和反馈控制standalone; self-contained; independent; self-governed;autocephalous; indie; absolute; unattached; substantive前馈控制、反馈控制及前馈-反馈控制的对比1、前馈控制属于开环控制,反馈控制属于负反馈的闭环控制一般定值控制系统是按照测量值与给定值比较得到的偏差进行调节,属于闭环负反馈调节。
其特点是在被控变量出现偏差后才进行调节;如果干扰已经发生而没有产生偏差,调节器不会进行工作。
因此反馈控制方式的调节作用落后于干扰作用。
前馈调节是按照干扰作用来进行调节的。
前馈控制将干扰测量出来并直接引入调节装置,对于干扰的克服比反馈控制及时。
现在以换热器控制方案举例,直观阐述前馈控制和反馈控制:前馈控制方案反馈控制方案2、前馈控制系统中测量干扰量,反馈控制系统中测量被控变量在单纯的前馈控制系统中,不测量被控变量,而单纯的反馈控制系统中不测量干扰量。
3、前馈控制需要专用调节器,反馈控制一般采用通用PID调节器反馈调节符合PID调节规律,常用通用PID调节器、DCS等或PLC控制系统实现。
前馈调节使用的调节器是是根据被控对象的特点来确定调节规律的前馈调节器。
4、前馈控制只能克服所测量的干扰,反馈控制则可克服所有干扰前馈控制系统中若干扰量不可测量,前馈就不可能加以克服。
而反馈控制系统中,任何干扰,只要它影响到被控变量,都能在一定程度上加以克服。
5、前馈控制理论上可以无差,反馈控制必定有差反馈调节使系统达到动态稳定,让被调参数稳定在给定值附近动态变化,却不能使被调参数稳定在给定值上不动。
前馈调节在理论上可以实现无差调节。
6、前馈控制的局限性A、在生产应用中各种环节的特性是随负荷变化的,对象动态特性形式多样性难以精确测量,容易造成过补偿或欠补偿。
为了补偿前馈调节的不准确,通常将前馈和反馈控制系统结合起来组成前馈反馈控制系统。
广义预测控制,算法及仿真实例
广义预测控制算法及实例分析一.广义预测控制算法1.广义预测控制的提出广义预测控制是预测控制中三种常见算法之一。
预测控制的提出并不是某一种统一理论的产物,而是源于工业实践,并在工业实践过程中发展和完善起来的一类新型计算机控制算法。
预测控制不会过分依赖被控对象的精确数学模型,能很好的应对工业对象的结构、参数的不确定性,且用工业计算机较容易实现。
2.广义预测控制的基本原理广义预测控制是预测控制中最具代表性的算法,他有三方面的特点:基于传统的参数模型,模型参数少;是在自适应发展过称中发展起来的,保留了自适应发展的优点且更具鲁棒性;采用多步预测、滚动优化、反馈校正更适于工业应用。
广义预测控制基本原理:预测模型、滚动优化、反馈校正预测模型:预测控制的模型称为预测模型。
预测控制对模型的要求只强调其功能而非结构,只要模型可利用过去己知数据信息预测系统未来的输出行为,就可以作为预测模型。
在DMC、MAC等预测控制策略中,采用了阶跃响应、脉冲响应等非参数模型,而GPC预测控制策略则多选择CARIMA参数模型。
滚动优化:预测控制是一种优化控制算法,通过某一性能指标的最优来确定未来的控制作用。
预测控制的优化标准不是采用一成不变的全局最优化目标,而是采用滚动式的有限时域优化策略。
优化不是一次离线进行,而是反复在线进行。
在每一采样时刻,优化性能指标只涉及到未来有限的时域,而到下一采样时刻,这一优化时域同时向前推移。
因此,预测控制在每一时刻有一个相对于该时刻的优化性能指标,即实现滚动优化。
反馈校正:预测控制算法在进行滚动优化时,优化的基点应与系统实际一致。
但作为基础的预测模型,只是对象动态特性的粗略描述,可能与实时状态不慎符合。
这就需要用附加的预测手段补充模型预测的不足,或对基础模型进行在线修正。
预测控制算法在通过优化确定了一系列未来的控制作用后,每次只是实施当前时刻的控制作用。
到下一采样时刻,则首先检测对象的实际输出,并利用这一实时信息对基于模型的预测进行修正,然后再进行新的优化。
控制系统的反馈与前馈控制技术

控制系统的反馈与前馈控制技术控制系统是现代工程中不可或缺的一部分,它可以用来控制各种各样的系统,从机械装置到电子设备。
控制系统的设计和实现涉及多种技术和方法。
其中,反馈与前馈控制技术是两种常用的控制策略,它们对于提高系统的稳定性和性能至关重要。
本文将介绍控制系统的反馈和前馈控制技术,以及它们的应用和优势。
一、反馈控制技术反馈控制技术是一种通过测量系统输出并与期望输出进行比较,然后对系统进行调整的控制策略。
反馈控制系统通常包括传感器、控制器和执行器。
传感器用于测量系统的输出,控制器根据输出和期望输出之间的差异来指导执行器的行为。
反馈控制技术的基本原理是根据系统的实际运行情况进行实时调整,以达到期望的控制效果。
反馈控制技术具有许多优势。
首先,它可以对系统的不确定性和外部干扰做出快速响应,并自动调整系统以适应环境变化。
其次,反馈控制技术可以提高系统的稳定性和鲁棒性,减少系统运行过程中的波动和振荡。
最后,反馈控制技术还可以实现对系统输出的精确控制,使系统在不同的工作条件下始终保持期望的性能。
二、前馈控制技术前馈控制技术是一种根据系统输入的参考信号预测系统输出,并根据预测结果进行控制的策略。
前馈控制系统通常包括传感器、预测器和执行器。
传感器用于测量输入信号和系统输出,预测器根据输入信号的特征和系统的数学模型来预测系统输出的未来变化,执行器根据预测结果来调整系统的控制策略。
前馈控制技术的主要优势在于它可以通过提前预测和调整系统来消除输入信号对系统性能的影响。
这种技术可以在系统遇到外部扰动或变化时快速响应,从而提高控制系统的性能。
此外,前馈控制技术还可以减少系统运行过程中的误差和稳态偏差,使系统更加可靠和精确。
三、反馈与前馈控制技术的综合应用在实际控制系统中,反馈与前馈控制技术通常会综合应用,以充分发挥各自的优势。
综合应用反馈与前馈控制技术可以实现更加精确和稳定的控制效果,提高系统的性能和鲁棒性。
在一些高精度、高稳定性要求的系统中,反馈控制技术可以提供及时的误差修正,使系统能够在快速变化的工作环境中保持稳定。
说明前馈控制与反馈控制各自的优缺点
说明前馈控制与反馈控制各自的优缺点前馈控制与反馈控制是控制系统中两种常见的控制策略。
它们各自具有优点和缺点,下面将对这两种控制策略进行详细说明。
我们来讨论前馈控制。
前馈控制是一种通过预测和补偿系统的输入来实现对系统输出的控制的方法。
在前馈控制中,控制系统通过测量输入信号的变化,并通过数学模型预测系统输出的变化,从而提前采取相应的控制措施。
这种方法的优点主要体现在以下几个方面。
前馈控制能够快速响应系统输入的变化。
由于前馈控制是提前对系统输入进行预测和补偿,因此可以在输入信号发生变化之前就采取相应的控制动作,从而能够快速调整系统的输出。
这使得前馈控制在需要快速响应的应用中非常有优势,比如飞行器的姿态控制。
前馈控制能够减小系统的误差。
通过提前预测系统输出的变化,前馈控制可以在系统输出发生偏差之前就进行补偿,从而减小系统的误差。
这对于一些对准确性要求较高的应用非常重要,比如机器人的精确定位和轨迹跟踪。
然而,前馈控制也存在一些缺点。
首先,前馈控制需要准确的数学模型。
由于前馈控制是通过数学模型来预测系统输出的变化,因此需要准确地建立系统的数学模型。
这对于一些复杂的系统来说是非常困难的,因为系统的数学模型可能会受到各种因素的影响而产生误差。
前馈控制对系统的不确定性和扰动不敏感。
由于前馈控制是根据预测的输入信号来进行控制的,因此对于系统的不确定性和扰动不敏感。
这意味着前馈控制无法适应系统的实际变化情况,可能会导致控制效果不理想。
接下来,我们来讨论反馈控制。
反馈控制是一种通过测量系统输出并与期望输出进行比较,然后根据比较结果来调整系统输入的控制方法。
反馈控制的优点主要体现在以下几个方面。
反馈控制能够适应系统的实际变化情况。
通过不断测量系统的输出并与期望输出进行比较,反馈控制可以及时调整系统的输入,以适应系统的实际变化情况。
这使得反馈控制在应对系统的不确定性和扰动时非常有效。
反馈控制对系统的不确定性和扰动具有较强的鲁棒性。
第六章 前馈-反馈控制
1+ WT (s)WD (s)
1+ WT (s)WD (s)
由于WDZ(S)≠0,因此扰动对系统输出是有影响的。
(2)复合控制系统补偿控制的控制规律不仅与对 象控制通道和干扰通道的传递函数有关,还与反馈调 节器的位置有关。
若复合控制系统的组成如下图所示,反馈调节器与
上图相比,不是放在前馈信号前面,而是放在它的后
的情况下,经过前馈控制以后,被调量不变,即实现了所 谓“完全补偿”,此时:
Y(s) / D(S) = GD(S)+ G (S)Gm(S)=0
所以,前馈控制器的控制规律为:
Gm(S)= -GD (S)/ G(S)
6-2 ()
上式说明前馈控制的控制规律完全是由对象特性 决定的,它是干扰通道和控制通道传递函数之商,式 中负号表示控制作用的方向与干扰作用相反。
三、复合控制
1. 基本原理
工程实际中,为克服前馈控制的局限性从而提高控 制质量,对一两个主要扰动采取前馈补偿,而对其它引 起被调参数变化的干扰采用反馈控制来克服。以这种形 式组成的系统称为前馈一反馈复合控制系统。前馈-反 馈复合控制系统既能发挥前馈调节控制及时的优点,又 能保持反馈控制对各种扰动因素都有抑制作用的长处, 因此得到了广泛的应用。
(
s
)
⋅
Z
(s)
因为1+ WT(S) WD(S)≥l,因此
Y1' (s) ≪ Y1(s)
对于其他未经过补偿的扰动作用也有类似的结果。
(4)前馈补偿对于系统的稳定性没有影响。
这一点是显而易见的,因为前馈无论加在什么位 置,它都不构成回路,系统的输入一输出传递函数的 分母均保持不变,因而不会影响系统的稳定性。
第13讲前馈--反馈控制系统分析
第13讲前馈--反馈控制系统分析一、前馈——反馈复合控制系统1 前馈——反馈复合控制系统的基本概念前馈——反馈复合控制系统:系统中既有针对主要扰动信号进行补偿的前馈控制,又存在对被调量采用反馈控制以克服其它的扰动信号,这样的控制系统就是前馈——反馈复合控制系统。
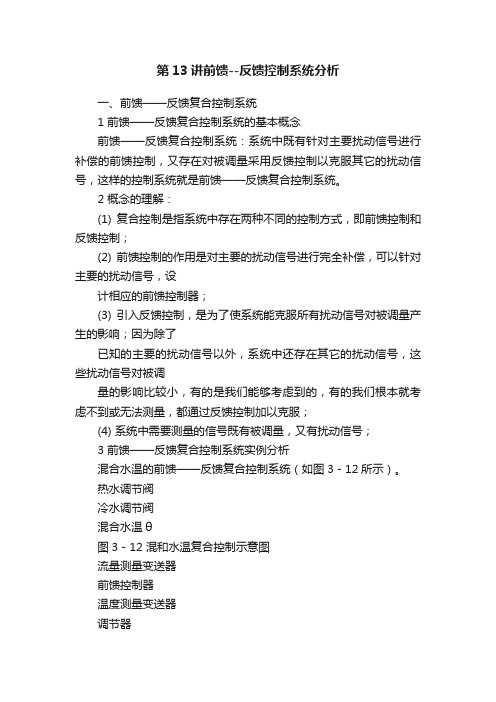
2 概念的理解:(1) 复合控制是指系统中存在两种不同的控制方式,即前馈控制和反馈控制;(2) 前馈控制的作用是对主要的扰动信号进行完全补偿,可以针对主要的扰动信号,设计相应的前馈控制器;(3) 引入反馈控制,是为了使系统能克服所有扰动信号对被调量产生的影响;因为除了已知的主要的扰动信号以外,系统中还存在其它的扰动信号,这些扰动信号对被调量的影响比较小,有的是我们能够考虑到的,有的我们根本就考虑不到或无法测量,都通过反馈控制加以克服;(4) 系统中需要测量的信号既有被调量,又有扰动信号;3 前馈——反馈复合控制系统实例分析混合水温的前馈——反馈复合控制系统(如图3-12所示)。
热水调节阀冷水调节阀混合水温θ图3-12 混和水温复合控制示意图流量测量变送器前馈控制器温度测量变送器调节器执行器4前馈——反馈复合控制系统的组成前馈——反馈复合控制系统主要由以下环节构成:(1) 扰动信号测量变送器:对扰动信号进行测量并转换成统一的电信号; (2) 被调量测量变送器:对被调量进行测量并转换成统一的电信号; (3) 前馈控制器:对扰动信号进行完全补偿; (4) 调节器:反馈控制调节器,对被调量进行调节; (5) 执行器和调节机构(6) 扰动通道对象:扰动信号通过该通道对被调量产生影响;(7) 控制通道对象:调节量通过该通道对被调量进行调节;前馈——反馈复合控制系统的原理方框图如图3-13所示。
C++ 图3-13 前馈反馈复合控制系统原理图Z++-R +W D (s)W B (s)K z K fW ob (s)K mW r (s)K m为便于分析,通常可将前馈——反馈复合控制系统原理图进行简化,如图3-14所示。
前馈控制和反馈控制
前馈控制和反馈控制前馈反馈控制讲解前馈控制系统前馈反馈控制讲解内容前馈控制的由来与原理静态前馈控制系统前馈控制系统的动态补偿前馈反馈控制系统结论前馈反馈控制讲解一、基本原理及特点问题:过程特性决定了它被控制的难易,一个本性难控的过程具有Kf大、Tf_lt;To、τ o/To大的特点,难控过程受到较大扰动后,反馈控制的效果将不令人满意。
下面分析其原因,并讨论相应对策。
原因相应措施⒈本性难控过程克服扰动的稳定时间长⒈将扰动克服在被控变量偏产生偏差大;离设定值之前⒉反馈控制器不会区别偏差产生的原因,⒉针对较大可测和不可控的只是减少偏差,直到趋近“0”; 扰动采取措施,使被控变量在扰动下基本不变⒊扰动产生频率过高,将使系统振荡;⒊开环控制“前馈控制方案前馈反馈控制讲解一、基本原理及特点D1 前馈控制器对象 y DnD1,……,Dn 为可测扰动;u, y分别为被控对象的操作变量与受控变量。
u前馈控制思想:在扰动还未影响输出以前,直接改变操作变量,以使输出不受或少受外部扰动的影响。
前馈控制定义:是测取进入过程的干扰(包括外界干扰和设定值变化,并按其信号产生合适的控制作用去改变操纵变量,使被控变量维持在设定值上。
例如,我们以换热器前馈控制系统来说明其方案控制过程前馈反馈控制讲解一、基本原理及特点换热器控制方案举例蒸汽蒸汽TCHV, RVFFHV, RV工艺介质RF工艺介质cp, RF , T1凝液T2cp, RF , T1凝液T2反馈控制方案前馈控制方案前馈反馈控制讲解一、基本原理及特点换热器前馈控制方块图d(t) GYD (s) u(t) GFF (s) GYC (s)+ +Y ( s) GYD ( s) GFF ( s)GYC ( s) 0 D( s )控制目标:D(S)≠0时,要求Y(S)=0本例中,d (t)、u (t)、y (t) 分别表示工艺介质流量(外部干扰)、蒸汽流量(控制变量)与工艺介质的出口温度(被控变 y(t) 量);GFF(s)为前馈控制器的动态特性;GYD(s)、GYC(s)分别为干扰通道与控制通道的的动态特性。
一文说清串级、比值、前馈-反馈、选择性、分程以及三冲量六种复杂控制系统

一文说清串级、比值、前馈-反馈、选择性、分程以及三冲量六种复杂控制系统导读控制系统一般又可分为简单控制系统和复杂控制系统两大类,所谓复杂,是相对于简单而言的。
凡是多参数,具有两个以上变送器、两个以上调节器或两个以上调节阀组成多回路的自动控制系统,称之为复杂控制系统。
目前常用的复杂控制系统有串级、比值、前馈-反馈、选择性、分程以及三冲量等,并且随着生产发展的需要和科学技术进步,又陆续出现了许多其他新型的复杂控制系统。
1、串级控制系统串级控制系统是应用最早,效果最好,使用最广泛的一种复杂控制系统,它的特点是两个调节器相串联,主调节器的输出作为副调节器的设定,当对象的滞后较大,干扰比较剧烈、频繁时,可考虑采用串级控制系统。
1、基本概念串级控制系统(Cascade Cont ro1System)是一种常用的复杂控制系统,它根据系统结构命名。
它由两个或两个以上的控制器串联连接组成,一个控制器的输出作为另一个控制器的设定值,这类控制系统称为串级控制系统。
•主调节器(主控制器):根据主参数与给定值的偏差而动作,其输出作为副调节器的给定值的调节器。
•副调节器(副控制器):其给定值由主调节器的输出决定,并根据副参数与给定值(即主调节器输出)的偏差动作。
•主回路(外回路):断开副调节器的反馈回路后的整个外回路。
•副回路(内回路):由副参数、副调节器及所包括的一部分对象所组成的闭合回路(随动回路)•主对象(惰性区):主参数所处的那一部分工艺设备,它的输入信号为副变量,输出信号为主参数(主变量)。
•副对象(导前区):副参数所处的那一部分工艺设备,它的输入信号为调节量,其输出信号为副参数(副变量)。
2、串级控制系统的特点串级控制系统在结构上增加了一个随动的副回路,因此,与单回路相比有以下几个特点:1.对进入副回路的扰动具有较迅速、较强的克服能力;2.可以改善对象特性,提高工作效率;3.可消除调节阀等非线性特性的影响;4.串级控制系统具有一定的自适应能力3、串级控制系统参数整定和系统投运串级控制系统的投运和简单控制系统一样,要求投运过程保证做到无扰动切换。
工业串联系统的多约束广义预测控制
LI Pi g, REN n hu n Pe g i
( c o l f I f r to n n r l giern S h o n o main a d Co to o En n ei g,Lio ig S i u i est a n n h h a Unv riy,Fuh n 1 3 0 ,Li o i g,Chn ) su 1 0 1 a nn ia
构 成 的 多 约 束 情 况 下 ,提 出 了工 业 串联 系统 的 多 约 束 广 义 预 测 控 制 算 法 。仿 真 结 果 验 证 了该 算 法 对 多 约 束 串联
系统 的 有 效 性 和 较 强 的 鲁 棒 性 。
关 键 词 :工 业 串联 系 统 ;多 约 束 ;广 义 预 测 控 制 ;二 次 规 划 中图 分 类 号 :T 7 P23 文 献 标 识 码 :A 文 章 编 号 :0 3 — 1 5 (0 0 0 — 2 5 — 0 4 8 l7 2 1 ) 8 1 9 6
c nsr i t fo t u ro s I s si t r a a ib e o e ito nd fe b c . o t an s o u p te r r . tu e n e n lv ra lsf rpr d cin a e d a k Thesm u ai n r s ls s o t a i lto e u t h w h t
第 6 卷 1
第 8 期
化 工 学
报
VO1 NO. .61 8 Au gus 2 0 t 01
21 O 0年 8月 源自CI ESC J u n l o r a
工 业 串联 系 统 的 多 约 束 广 义 预 测 控 制
李 平 ,任 朋 辉
热工控制系统课堂第七章前馈反馈复合控制系统
以这种形式组成的系统称为前馈--反馈复合控制系统。
7-1
11
前馈--反馈复合控制系统既能发挥前馈调节控制及时的优点, 又能保持反馈控制对各种扰动因素都有抑制作用的长处,因此得到 广泛应用。
复合控制系统具有以下几个特点:
一、引入反馈控制后,前馈控制中的完全补偿条件不变 图7-2为前馈--反馈复合控制系统的原理方框图:
影响水位的因素除此之外,还有给水压力,汽包压力,汽轮机 调速汽门开度,二次风分配等。
不过这些因素几乎都可以用D、M、G的变化体现出来。
和维护工作量。
7-1
10
此外,当干扰通道的时间常数小于控制通道的时间常数 时,不能实现完全补偿。
再者,前馈控制模型的精度也受到多种因素的限制,对 象特性受负荷和工况等因素的影响而产生偏移,必然导致 WD(S)和WDZ(S)的变化,因此一个事先固定的前馈模型不可能获 得良好的控制质量。
工程实际中,为克服前馈控制的局限性从而提高控制质量, 对一两个主要扰动采取前馈补偿,而对其它仪器被调参数变化 的干扰采用反馈控制来克服。
+ Y(θ1)
+
KB
WB(S)
WD(S)
图7-1 前馈控制原理框图
5
图中, KB:测量变送器的变送系数; WDZ(S):干扰通道对象传递函数; WD(S): 控制通道对象传递函数; WB(S): 前馈控制装置或前馈调节器的传递函数。
7-1
6
第二节 前馈控制系统的特点
理想的情况下,针对某种扰动的前馈控制系统能够完全补偿因 扰动而引起的对被调量的影响。
在满负荷运行时,如果突然停止供水,则由于蒸发量和给水量的不
平衡造成水位迅速下降,在30s内将下降200mm或者换句话说,如 果给水量减少10 %,经过30s的时间,水位将下降20mm。
科学名词-反馈控制与前馈控制
科学名词-反馈控制与前馈控制管理控制的基本过程,实质上同物理、生物和社会系统中的控制相同。
控制论奠基人维纳指出,一切类型的控制系统,都是用揭露在目标实现过程中的错误和采取纠正措施的信息反馈来控制自己的。
换言之,各种系统都是用自身的某些能量来在成效和标准之间进行反馈,从而比较所得的信息。
反馈控制就是根据最终结果产生的偏差来指导将来的行动。
反馈控制的基本过程为:以预期业绩为标准-→衡量实际业绩-→将实际业绩与标准相比较-→确定偏差-→分析造成偏差的原因-→确定纠正方案-→贯彻纠正措施。
可见,反馈控制是保证计划不出偏差,得以顺利实施的必要环节。
在管理系统中具有极其重要的地位。
反馈信息是管理者对客观实际情况变化(结果)作出正确反应的重要依据。
管理成功与否,关键就在于是否具有灵敏、准确、迅速的反馈。
但是,仅有反馈控制还远远不够。
在管理工作中,时间延迟是常见的。
例如,11月份的会计报表所报告的是10月份的亏损情况,而这一亏损又可能是7月份发生的某些事情所造成的。
而且,收到反馈信息后,要分析偏差的原因,选择校正方案,再贯彻校正措施,又要经历较长的延迟。
所以,用反馈控制常常会失运河宝贵的时机,使控制失效。
要改变这种局面,就要使用另一种控制方法--前馈控制。
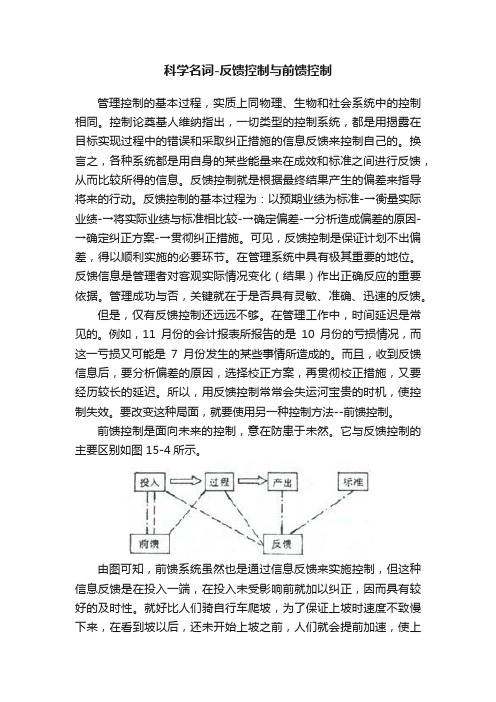
前馈控制是面向未来的控制,意在防患于未然。
它与反馈控制的主要区别如图 15-4所示。
由图可知,前馈系统虽然也是通过信息反馈来实施控制,但这种信息反馈是在投入一端,在投入未受影响前就加以纠正,因而具有较好的及时性。
就好比人们骑自行车爬坡,为了保证上坡时速度不致慢下来,在看到坡以后,还未开始上坡之前,人们就会提前加速,使上坡过程顺利。
前馈控制采用的普遍方式,是利用所能得到的最新信息,进行认真、反复的预测,把计划所要达到的目标同预测相比较,并采取措施修改计划,以使预测与计划目标相吻合。
目前运用的比较先进的前馈控制技术之一是计划评审法,或称网络分析法。
它可以预先知道哪些工序的延时会影响到整个工期,在何时会出现何种资源需求高峰,从而采取有效的预防措施与行之有效的管理办法。
前馈-反馈控制系统的优点
Gc11 Gc21 Gc12 Gc22
G11 G21 G12 G22
42
双变量的反馈解耦系统
Gc11 Gf21 Gf12 Gc22 Gv11 Gv21 Gv12 Gv22
43
双变量解耦系统框图
Gc1
N11 N21 N12
G11 G21 G12 G22
44
Gc2
N22
36
(三)调节器控制规律的确定
(1)单闭环比值控制系统,比值器选P, 控制器选PI。
(2)双闭环比值控制系统,两个调节器均 应选PI。 (3)串级(变)比值控制系统,主调节器 选 PI或PID 控制规律,副调节器选用 P( 或 PI)控制规律。
37
三、比值控制系统整定
(1)变比值控制系统,可按串级控制系统进行。 (2)单闭环比值控制系统的整定: 1)根据工艺要求的流量比值K,进行投运。 2)将积分时间置于最大值,由大到小逐步改 变比例带,直到在阶跃干扰下过渡过程处于振 荡与不振荡的临界过程为止。 3)若有积分作用,则适当放宽比例带,减小 积分时间,直到出现临界过程或稍有点过调。 (3)双闭环比值控制系统,副回路按单回路整定, 主流量回路的过渡过程一般应整定成非周期过 程。
2
内扰 给定值 PI1 主调 PI2 副调
执行器
副变量
主变量
阀门
减温器 副对象
主对象 过热器
变送器 变送器
副回路(内回路):粗调 主回路(外回路):细调
主参数(主变量): θ
副参数(副变量): θ
1 2
3
二.串级控制系统的分析
(一)副回路对控制品质的影响
1. 减小了时间常数
Gc1 Gc2 Gf Gm2 Gm1
反馈与前馈组合概要
2021/12/31
2021/12/31
2.前馈控制特点
前馈控制是一种预测控制,通过对系统当前工作状态的了解,预测出下一阶段系统的 运行状况。如果与参考值有偏差,那么就提前给出控制信号,使干扰获得补偿,稳定 输出,消除误差。
被控变量 偏差出现后 干扰量 偏差出现前
2021/12/31
3.反馈与前馈组合控制
前馈控制是一种预测控制,通过对系统当前工作 状态的了解,预测出下一阶段系统的运行状况。 如果与参考值有偏差,那么就提前给出控制信号, 使干扰获得补偿,稳定输出,消除误差。但在实 际工程中,并不是所有的干扰都是可测的。所以 仅用前馈并不能达到良好的控制品质。这时就需 要加入反馈,反馈的特点是根据偏差来决定控制 输入,不管对象的模型如何,也不管外界的干扰 如何,只要有偏差,就根据偏差进行纠正,可以 有效的消除稳态误差。解决前馈不能控制的不可 测干扰。
换热器前馈控制wwwthemegallerycom反馈前馈比较反馈前馈比较控制依据检测信号控制作用发生时间反馈控制被控变量的偏差被控变量偏差出现后前馈控制干扰量的大小干扰量偏差出现前wwwthemegallerycom前馈控制是一种预测控制通过对系统当前工作状态的了解预测出下一阶段系统的运行状况
反馈与前馈组合概要
反馈控制的优点:反馈控制系统按偏差来进行调节,偏差即为被控变量给定 值与测量值的差,不论是什么干扰引起被控变量的变化,调节器均可根据偏
差进行调节。(闭环稳定,可以消除多种扰动对被控变量的影响)
反馈控制的固有缺点:对象总存在滞后惯性,从扰动作用出现到形成偏差
需要时间。偏差产生后,偏差信号遍及整个反馈环路产生调节作用去抵消干 扰作用的影响又需要一些时间。也就是说,反馈控制根本无法将扰动克服在 被控变量偏离给定值之前,调节作用总不及时从而限制了调节质量的进一步 提高。
前馈、反馈、三冲量控制介绍

一.前馈控制原理前面讨论的所有控制系统,都属于反馈控制系统,无论其系统结构如何,它们的调节回路的基本工作原理都是一样的。
下面要介绍的前馈控制系统则有着截然不同的控制思想。
前馈控制思想及应用由来已久,但主要是由于技术条件的限制,发展较慢。
随着计算机和现代检测技术的飞速发展,前馈控制正受到更多的重视和应用。
在反馈控制系统中,都是把被控变量测量出来,并与给定值相比较;而在前馈控制系统中,不测量被控变量,而是测量干扰变量,也不与被控变量的给定值进行比较。
这是前馈与反馈的主要区别。
为了系统地说明前馈控制思想,同时也为了在比较中进一步加深对反馈控制思想的理解,画出图8-31进行比较分析。
(a)反馈控制(b)前馈控制图8-31 两种加热炉温度控制系统图8-31中的(a)是反馈控制,(b)是前馈控制。
在前馈控制中,测量需要被加热的原油的流量,流量偏大就增加燃料量,原油流量偏小就减少燃料量,以达到稳定原油出口温度的目的。
从动态过程分析,当原油流量增大时,一段时间后,出口温度会下降。
但前馈测量出原油流量的增加量,迅速增加燃料量。
如果燃料增加的量和时机都很好,有可能在炉膛中将干扰克服,几乎不影响原油出口温度。
如果该加热炉只存在原油流量这一个干扰,那么理论上讲,前馈控制可以把原油出口温度控制得很精确,甚至被控变量一点也不波动。
这就是前馈控制思想,也是前馈控制的生命力所在。
二.前馈控制与反馈控制的比较通常认为,前馈控制有如下几个特点:(l)是“开环”控制系统;(2)对所测干扰反应快,控制及时;(3)采用专用调节器;(4)只能克服系统中所能测量的干扰。
下面从几个方面比较前馈控制与反馈控制。
画出图8-31两个控制系统的方块图如图8-32所示。
(a)反馈控制(b)前馈控制图8-32 两种加热炉温度控制系统方块图l.前馈是“开环”,反馈是“闭环”控制系统从图8-32可以看到,表面上,两种控制系统都形成了环路,但反馈控制系统中,在环路上的任一点,沿信号线方向前行,可以回到出发点形成闭合环路,成为“闭环”控制系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
的 多 输 出 变 量 。 用 多 变 量 广 义 预 测 控 制 的 思 想 给 出 了 算 法 的 控 制 结 构 , 现 了 前 馈 控 制 与 反 馈 控 制 的 运 实 有 机结 合 。仿 真结 果表 明, 算法 能极 大地 改善 串联 系统 的抗 干扰 性 和鲁棒 性 。 该
关 键 词 :串联 系 统 ; 馈 控 制 ; 馈 控 制 ; 义 预 测 控 制 反 前 广 中 图 分 类 号 : 7 TP 2 3 文 献标 识码 : A
C h na; 2. D e r m e ut i pa t nt ofA om a i ton,F u hun Pet ol s r eum ns i ut I tt e,Fus hun 3001,C hi 11 na;
3 S e y n n tt t fA u o to . h n a g I s iu e o t ma i n,Ch n s a e y ofS i n e i e e Ac d m c e c s,S e a 1 0 5 h ny ng 1 0 1 ,Ch n i a)
维.
控
制
与
决
策
20 0 2年 7月
J l 0 2 uy2 0
Co t o and D e ii n nrl c so
文 章 编 号 :1 0 — 9 0 2 0 ) 4 0 0 — 5 0 10 2 ( 0 2 0— 4 20
Qia — n ,LI Pi g ,yU a — i 。 n H ibn ,W A N G u q n Sh — i g
( . a eKe b r t r fI d sra n r lTe h o o y,Zh j n nv r iy,Ha g h u 3 0 2 1 Stt y La o ao y o n u tilCo to c n lg ei g U ie st a n z o 1 0 7,
Abs r t A uli e f ed—or a d and f edb k G PC g i hm orc c de s t m sdev ope O m a t ac : m tpl e f w r e ac al or t f as a ys e i el d t ke f lus he know a ei or aton he pl O ast i ou he optm um ont olpe f m anc . ul e oft bl nf m i oft antS o br ng ab t t i c r r or e T h s a go ihm t i l r t ake t knowabl e e i s ur anc s as t uli e i s he e xt ror dit b e he m tpl nput nd t m e u abl s a he as r e
串 联 系 统 的 多 前 馈 一 馈 广 义 预 测 控 制 反
李 奇 安 ,李 平 。 ,于 海 斌 。 ,王 树 青
( . 江 大 学 工 业 控 制 技 术 国 家 重 点 实 验 室 , 江 杭 州 3 0 2 ;2 抚 顺 石 油 学 院 1浙 浙 10 7 .
自动 化 系 , 宁 抚 顺 1 3 0 ; . 国 科 学 院 沈 阳 自动 化 研 究 所 , 宁 沈 阳 1 0 1 ) 辽 10 1 3 中 辽 1 0 5
i t r a v r a l s s h m u tp e n e n 1 a i b e a t e li l ou p t . T h e d a k c nto n h e d f r r o t o r t us e f e b c o r l a d t e f e —o wa d c n r 1a e
摘 要 :为 了充 分 利 用 对 象 的 可 知 信 息 以 实 现 串联 系 统 的 最 优 控 制 , 出 了 串联 系 统 的 多 前 馈 一 馈 广 提 反 义 预 测 控 制 算 法 。 算 法 把 系 统 的 可 知 外 部 扰 动 作 为 系 统 的 多 输 入 变 量 , 可 测 量 的 中 问 变 量 作 为 系 统 该 把
i e a ed t nt gr t oge he at r ly by utlzng he m u t — PC e hod ogy. Si ul ton r s t how hatt s t r n u a l iii t l iG m t ol m a i e uls s t hi a go ihm ubs a i ly i p ove he a lt ess i st ba e and r bus ne s. l rt s t nta l m r s t bi y ofr i tng di ur nc i o t s Ke y wor ds: c s ad y t m ; f dba k c ac esse ee c ont o1 f e f w a d c r ; e d— or r ont o1 r ;G PC
M ul i e f e f r tpl e d— o wa d a e db k ge r lz d r nd f e ac ne a i e pr di t v o r or c s a y t m e c i e c nt olf a c de s s e