结构力学教案--力法3
结构力学第6章力法3ppt课件

X1
1P
11
2 2 FP
-FP
FN
X1 F N1 FNP
2 2
FP
FN1
FNP
FP FNP FP
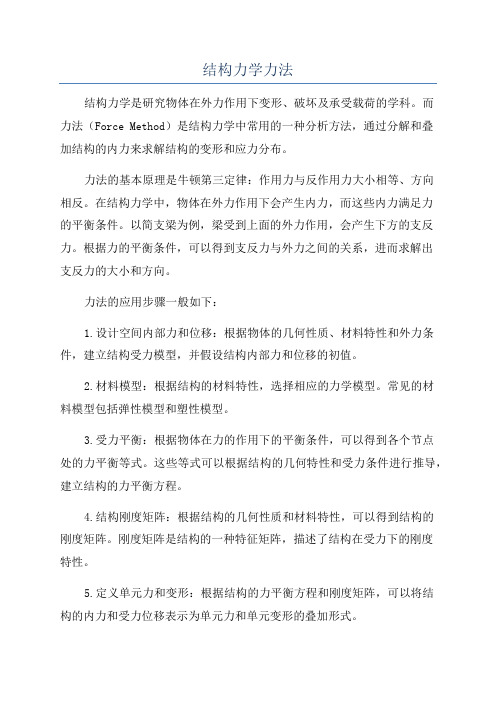
习惯上列表计算
杆件 l
FN1 FNP
01 a -1/√2 0 13 a -1/√2 -FP 23 a -1/√2 -FP 20 a -1/√2 0 03 √2a +1 √2FP 12 √2a +1 0
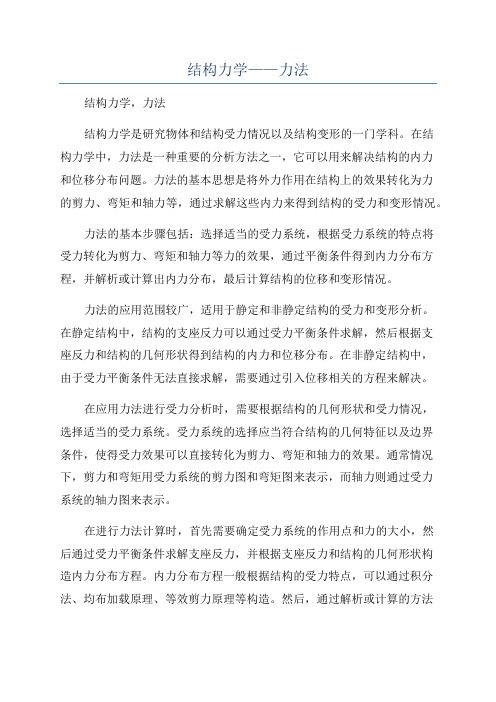
• (3)超静定结构内力分布与横梁和桁架 的相对刚度有关。下部链杆截面小,弯 矩图就趋向于简支梁的弯矩图;下部链 杆截面大,弯矩图就趋向于连续梁的弯 矩图。
作业:
• P268 6-5 (a)、6-6
2、超静定组合结构
•计算特点:
•梁式杆:
2
2
ii
F Nil EA
M i dx EI
ik
F Ni F Nkl EA
M i M k dx EI
iP
F Nii FNPl EA
M i M P dx EI
•二力杆:只考虑轴向变形对位移的影响
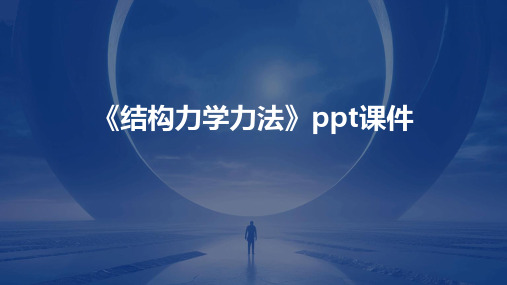
例:
图示加劲式吊车梁, 1.5m FP=74.2kN
FN12l
1/2×a 1/2×a 1/2×a 1/2×a
√2a √2a
FN1FNPl
FN
0 FP·a /√2 FP·a /√2
0 2FP·a
0
+FP /2 - FP /2 - FP /2 +FP /2 √2FP/2 -√2FP/2
∑
2(1+√2)a (√2+2)
讨论:
• 1、桁架中的杆件(EA=常数)不是去掉
例:用力法计算图示桁架,各杆EA=常数
【课程思政优秀案例】《结构力学I》:高铁建设中的结构力学——力法基本原理
课程思政优秀案例——《结构力学I》:高铁建设中的结构力学——力法基本原理一、课程和案例的基本情况课程名称:结构力学I授课对象:本科二年级课程性质:专业基础课课程简介:《结构力学I》是土木工程、铁道工程等专业学生必修的一门专业基础课。
该课程以培养“品德优秀、基础宽厚、思维创新、能力卓越”的土木工程人才为根本任务,主要研究工程上常见杆系结构的基本力学特征、内力分析与位移计算的基本原理和基本方法。
案例简介:本案例为结构力学教学大纲中的第38节课(共64节),时长50分钟,教学内容是介绍求解超静定结构的第一种基本方法—力法。
它是从静定结构过渡到超静定结构的第一节基本原理课,具有非常重要的承上启下作用。
本节课的教学目标主要包含以下三个层次:知识传授:重点掌握力法的基本原理和力法方程的物理含义能够应用力法基本原理求解一次超静定结构的内力能力培养:培养学生对超静定结构进行内力分析和计算的能力应用理论知识分析和解决实际工程问题的能力价值塑造:从我国高铁建设的巨大成就中厚植学生的家国情怀和职业使命通过启发引导培养学生的工程思维和解决实际问题的科学方法从不断的拓展思考中培养学生的深度学习能力和钻研精神二、案例蕴含的思政元素分析将结构力学课程与我国的高铁建设紧密结合,本案例打破“就力学谈力学”的局限性,从国家交通强国战略的角度充分挖掘了蕴含在力学基本原理中的育人元素,通过启发引导式的授课方式培养学生运用理论知识分析求解实际工程问题的工程思维和科学方法,拓展延伸培养学生的科研探索和创新精神,激发学生科技报国的家国情怀。
本案例主要包含以下思政元素:(1)交通强国、民族自信、职业使命通过北京奥运会、京张高铁引出中国速度和中国势力,一座座宏伟的高铁桥梁凝聚了一代又一代土木人的智慧和创新。
提出问题引入主题:如何计算连续梁桥的内力进行高铁桥梁的设计?让学生在感受民族自豪的同时思考土木工程师的职业使命。
(2)解决问题的工程思维和科学方法超静定结构的内力求解是面临的未知工程问题,如何利用已经掌握的静定结构的知识来分析求解呢?采用启发引导式的教学方法培养学生的工程思维和解决实际问题的科学方法。
结构力学——力法
几点注意:
① 一个无铰闭合框有三个多余约束,其超静定次数等于三。 ② 结构的超静定次数是确定不变的,但去掉多余约束的方式 是多种多样的。 ③ 在确定超静定次数时,要将内外多余约束全部去掉。
④ 在支座解除一个约束,用一个相应的约束反力来代替,在
结构内部解除约束,用作用力和反作用力一对力来代替。 ⑤ 只能去掉多余约束,不能去掉必要的约束,不能将原结构 变成瞬变体系或可变体系。
A
D
A
D
A
D
对
X1
错
二、关于基本方程的建立
先讨论两次超静定结构。
q C
FP A
12 22
q
B
C
FP A
B
X1
X2 FP
C
11 X1 B 21
A
基本体系之一
q C FP A B
1P 2P
q C X1 B X2
FP
C A
B X2
FP A
变形条件
Δ1 0 Δ2 0
基本体系之二
二、关于基本方程的建立
q
A l B l C A B
q
X1 X1
q
C
a)一次超静定结构 解:(1)确定基本未知量数目
b)基本体系
此连续梁外部具有一个多余约束,即n=1 (2)选择力法基本体系 (3)建立力法基本方程
Δ d11 X 1 Δ1P 0
(4)求系数d11和自由项1P 在基本结构(静定的简支梁)上分别作 M 1 图和MP图
q
EI
ql 2 8
9 q l2 128
q
EI
ql 2 2
比较可知,采取超静定结构降低了梁的最大 弯矩,提高了梁的强度。
结构力学教案

结构力学教案【篇一:结构力学教案】结构力学“十二五”普通高等教育本科国家级试讲人姓名:规划教材第六章 6-1超静定次数的确定 6-2力法的基本概念力法的基本概念教案教学目的:1. 掌握超静定次数的确定;2. 掌握力法的基本原理;3. 了解超静定结构的力学特征。
教学重点、难点: 1.判断超静定次数; 2.选取力法基本体系; 3. 了解力法基本方程。
教学方法:讲授法、演示法教学时数:1课时教学内容:导入:一、 6-1超静定次数的确定——力法的前期工作【板书】(一)超静定结构的静力平衡特征和几何特征为了认识超静定结构的特性,我们需要把它与静定结构作一些对比。
1. 在几何组成方面:静定结构是没有多余约束的几何不变体系,而超静定结构则是有多余约束的几何不变体系。
【板书】2. 在静力分析方面:静定结构的支座反力和截面内力都可以用静力平衡条件唯一地确定,而超静定结构的支座反力和截面内力不能完全由静力平衡条件唯一地加以确定。
总起来说,约束有多余的,内力(或支座反力)是超静定的,这就是超静定结构区别于静定结构的两大基本特征。
凡符合这两个特征的结构,就称为超静定结构。
(二)超静定次数的确定力法是以结构中的多余约束力为基本未知量的,一个结构的基本未知量数目就等于结构的多余约束数目。
因此,力法计算首先要找出结构的多余约束。
确定结构超静定次数最直接的方法是解除多余约束法,即将原结构的多余约束移去,使其成为一个(或几个)静定结构,则所解除的多余约束数目就是原结构的超静定次数。
解除超静定结构的多余约束,归纳起来有以下几种方式:例图【板书】 1. 移去一根支杆或切断一根链杆,相当于解除一个约束。
2.移去一个不动铰支座或切开一个单铰,相当于解除两个约束。
3.移去一个固定支座或切断一根梁式杆,相当于解除三个约束。
4.将固定支座改为不动铰支座或将梁式杆中某截面改为铰结,相当于解除一个转动约束。
对于框架,可采用下式计算超静定次数【板书】n=3f?h式中 f 为框格数,h 为单铰数注意:先将结构中每个框格都看作是无铰的,每个单铰的存在就减少1次超静定。
集美大学船舶结构力学(48学时)第三章 力法(3)2014(2学时)

216EI v 2 3 11l
M 2 M1 5 R2 ql l 2
因此,有方程:
216 EI M 2 M1 5 v ql 2 3 11l l 2
将此式与上面两方程联立 问题则解决。
题9 求下图 M , v , R 。 1 1 1
据3.6改 (教材52页)
梁的左半段断面惯性矩 为 I 1 ,右半段断面惯性矩 为 I 2 ,可以设想在断面变 化处加上一个柔性系数 A= ∞ 的弹性支座,如图4-27b)所示, 于是就可以按弹性支座上双跨 梁的方法来计算了。
静定基
v AR
EI1
R10
R R12
EI 2
v
静力平衡方程?
R0
A
转角连续方程式?
因此,可列出中间支座断面的 转角连续方程式:
R10
R12
3
l v1 AR1 ( R10 R12 ) 12EI 2 R ql 3
题8
(教材49页例2) 图3-26a所示的具有弹 性支座的多跨梁,试求其断 面弯矩、节点挠度和作用在 弹性支座上的力。
解:1、静定基:
M1
q 1
EI , l
M2
q
E,4I ,4l
M2
3
11l 3 A 216EI
即: 原模型:
A l3 6 EI
静定基:
EI , l EI , l
变协方: 4 4 5 q(2l ) 1 R(2l ) AR 384 EI 48 EI
由此直接解得:
R
v1 AR
可以去掉 中间的弹性支 座代以支反力 R,再利用变 形连续条件列 方程式求解。
R 5ql / 8
结构力学课件 力法

(5)叠加原理作M图
M1(m)
M A 360 6 ( 22) 228 M C 6 ( 22) 132
90
228
132
桁架
P
a
(1)基本体系 —基本未知量 (2)位移协调条件 —写力法基本方程 (3)求系数和自由项 —单位荷载法
a
(4)解力法方程 —求基本未知量
P
→ X1 ↑
拆开一个单铰,相当于去掉两个联系。
X1
X 1 ← → ↑ → X2
(3) 在刚结处作一切口,或去掉一个固定端,相当于去掉 三个联系。 X
X1
←→
X2
(4)将刚结改为单铰联结,相当于去掉一个联系。
X1 X1
← →
3
例1: 确定图示结构的超静定次数。
2
1 3
n=6
例2: 确定图示结构的超静定次数。 对于具有较多框格的结构, 可按框格的数目确定,因为一
q a
A
B X1
A
2 力法的基本概念
力法的基本体系
q
A B A
q a
力法的基本未知量
a
B X1
B点的位移条件Δ1=0
变形协调条件
q
A
B A
变形协调条件
Δ1=Δ1P+Δ11=0
Δ1P:基本体系在荷载q单独
a q
A B Δ1P
Δ11 B X1
作用下沿X1方向产生的位移;
Δ11:基本体系在荷载X1单 独作用下沿X1方向产生的 位移;
X1
X1
(1)基本体系 —基本未知量 (2)位移协调条件 —写力法基本方程
a
a
1P 11 X 1 0
飞行器结构力学电子教案4-3
——电子教学教案 电子教学教案
西北工业大学航空学院 航空结构工程系
第四章
静不定结构的内力与变形计算
Internal Forces and Deformations of Statically Indeterminate Structures 第三讲 力法一般原理
一、力法一般原理
i i P 1 1 2 2 n n i 1 1 i 2 2 i n n i
P
=0
式中, 式中,(∑SiVj )表示第 i 个单位状态的内力在第 j 个单位状态位 移上所做的虚功, 同样, 移上所做的虚功,仍记为δi j ,同样,记∑SiVP=iP ,则上式可 写成: 写成:
δ i1 X 1 + δ i 2 X 2 + L + δ in X n + iP = 0
一、力法一般原理
静不定结构内力同时要用平衡条件和变形协调条件。因而, 静不定结构内力同时要用平衡条件和变形协调条件。因而, 我们仍然从满足这两个条件出发进行讨论。 我们仍然从满足这两个条件出发进行讨论。 1.满足平衡条件 . 对n次静不定结构,根据力作用的叠加原理将真实的内力状态 次静不定结构, 次静不定结构 <R >看做是由 n+1 个内力状态叠加而成,其中一个内力状态是 个内力状态叠加而成, 看做是由 与外载荷相平衡的,即载荷状态<P , 与外载荷相平衡的,即载荷状态 >,其余 n 个内力状态是自身 平衡的(与外力无关 与外力无关)。 平衡的 与外力无关 。每一个自身平衡状态只决定一个多余未知 力X i,当X i =1时,即为单位状态 >。既然每个内力状态都满 时 即为单位状态<i 。既然每个内力状态都满 足平衡条件,那么, 足平衡条件,那么,这 n+1 个内力状态叠加的结果也必然满足 平衡条件。 平衡条件。即:
结构力学第三章
2 1 0
l
3 6 7 4
l
5 图3.6
解: (1)计算弹性支座柔性系数A 首先需设在节点1处柔性系数A= ,则由下图 可求出柔性系数A。
由力的平衡知,有M4=Rl,其变形连续方程为:
R
v1 M 4l M 4l M 5l M 4l M 5l , 0 l 3EI 3EI 6 EI 6 EI 3EI
第2章 力法
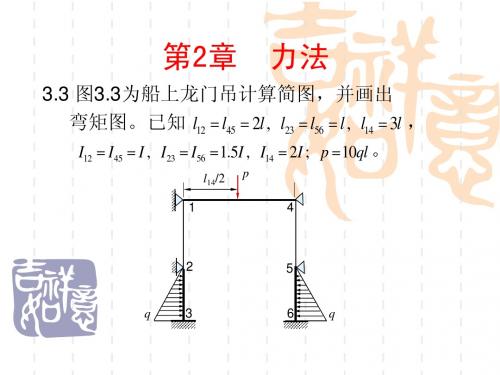
3.3 图3.3为船上龙门吊计算简图,并画出 弯矩图。已知 l12 l45 2l , l23 l56 l , l14 3l , I12 I45 I , I23 I56 1.5I , I14 2I ; p 10ql 。
l14/2 1 p 4
2
5
q
为此,将各杆取出有:
FB B FB ME p A= ME C FC
FC
R1E
MF A= MF
R1F
R2E
R2F
MA
MD RA RD
要使杆B-C轴向力平衡必有 FB=FC 由图中杆E-B和杆A-E可得:
R1E p
12 p 5M E 2M A 0 故有: 由图中杆D-F和杆F-C可得:
C D
MF
2 MD 5
(2)
3 M FB p A 5 10
FC MD 10
A
D
(3)
由式(a)、(b)得: 12M A 25M D 3EIfB 由式(c)、(d)得: 12M D 25M F 3EIfB 由式(e)、(f)得:12M A 25M E 12M D 25M F 0 将式(2)代入式(f)得:
结构力学老师讲课教案

结构力学老师讲课教案一、教学目标。
1. 了解结构力学的基本概念和原理。
2. 掌握结构力学的基本计算方法。
3. 能够应用结构力学知识解决实际工程问题。
二、教学内容。
1. 结构力学的基本概念。
2. 结构的受力分析。
3. 结构的位移和变形。
4. 结构的稳定性分析。
5. 结构的振动分析。
三、教学重点和难点。
1. 结构受力分析的方法和步骤。
2. 结构位移和变形的计算。
3. 结构的稳定性分析方法。
4. 结构的振动分析原理。
四、教学方法。
1. 理论讲解结合实例分析。
2. 计算实践和案例分析。
3. 课堂互动和讨论。
五、教学过程。
1. 结构力学基本概念的介绍。
结构力学的定义和研究对象。
结构受力的基本原理。
结构位移和变形的概念。
2. 结构受力分析。
结构受力分析的基本步骤。
结构受力分析的常用方法。
结构受力分析的实例分析。
3. 结构的位移和变形。
结构位移和变形的计算方法。
结构位移和变形的影响因素。
结构位移和变形的实例分析。
4. 结构的稳定性分析。
结构稳定性分析的基本原理。
结构稳定性分析的常用方法。
结构稳定性分析的实例分析。
5. 结构的振动分析。
结构振动分析的基本原理。
结构振动分析的常用方法。
结构振动分析的实例分析。
六、教学案例。
1. 某桥梁结构的受力分析。
根据桥梁结构的实际情况,进行受力分析和计算。
分析桥梁结构的受力特点和影响因素。
讨论桥梁结构的受力分析结果和改进方案。
2. 某建筑结构的位移和变形计算。
根据建筑结构的实际情况,进行位移和变形计算。
分析建筑结构的位移和变形特点和影响因素。
讨论建筑结构的位移和变形计算结果和改进方案。
3. 某塔吊结构的稳定性分析。
根据塔吊结构的实际情况,进行稳定性分析和计算。
分析塔吊结构的稳定性特点和影响因素。
讨论塔吊结构的稳定性分析结果和改进方案。
4. 某机械设备的振动分析。
根据机械设备的实际情况,进行振动分析和计算。
分析机械设备的振动特点和影响因素。
讨论机械设备的振动分析结果和改进方案。
结构力学第6章力法
结构力学第6章力法力法(也叫统一力法)是一种简化结构分析和计算的方法,通过将结构的内力和力的作用点集中在一些特定的位置,从而简化结构计算的复杂性。
力法在结构力学中有很广泛的应用,特别是在求解复杂结构的内力分布和变形方程时非常有用。
力法的基本原理是将结构的内力分布看作是由一系列基本力的叠加形成的。
这些基本力包括拉力、压力、剪力和弯矩等。
通过对这些基本力的作用点和大小进行合理的选取,可以将结构的内力分布近似为一个简单的形式,从而方便地进行计算。
力法的具体步骤如下:1.选择合适的基本力系统:根据结构的受力情况,选择适合的基本力系统,一般包括平行力、共点力、算术力和等效力等。
2.确定基本力的作用点和大小:通过结构的受力平衡条件和变形方程,确定基本力的作用点和大小,一般可以通过静力平衡方程或者变形方程进行计算。
3.将基本力作用在结构上:将确定的基本力作用在结构上,这些基本力可以是集中力也可以是分布力,根据具体情况进行选择。
4.分析结构的受力和变形:应用力学的基本原理和公式,分析结构的受力和变形情况,求解结构的内力和位移等参数。
5.进行计算和分析:根据步骤4中得到的结果,进行计算和分析,比较计算结果与实际情况的差异,进行调整和修正。
力法的优点是计算简单、直观,尤其适用于计算结构的内力和变形情况;缺点是只能得到局部的内力情况,无法得到整体的受力情况。
在结构力学中,力法的应用非常广泛。
例如,可以利用力法求解悬臂梁的内力分布和变形情况,以及桁架和刚架的受力情况等。
同时,力法还可以用于计算复杂结构的等效荷载,简化结构的计算过程。
总结起来,力法是一种通过将结构的内力和力的作用点集中在一些特定的位置,从而简化结构计算的方法。
通过选择合适的基本力系统,确定基本力的作用点和大小,将基本力作用在结构上,进行受力和变形分析,最终得到结构的内力和变形情况。
力法在结构力学中有很广泛的应用,对于求解复杂结构的内力分布和变形方程非常有用。
结构力学力法课件

力法典型应用
桁架结构分析:力法在桁架结构分析 中广泛应用,通过计算各杆件的内力, 可以判断结构的安全性和稳定性。
钢框架结构分析:力法可用于钢框架 结构的内力分析和节点设计,确保结 构在地震等荷载作用下的安全性。
梁板结构分析:对于梁板结构,力法 可用于求解弯矩、剪力和轴力等内力 分布,为结构设计提供重要依据。
通过以上内容的学习,可以更好地理 解和掌握结构力学力法的基本原理和 应用,为解决实际工程问题提供有效 的工具。
04
构力学力法
影响线及其应用
01
定义及作用
影响线是用于表示结构在单位移动荷载作用下,某一量值(如内力、位
移等)随荷载位置变化而变化的图形。利用影响线,可以方便地求解结
构在移动荷载作用下的最大响应。
构力学力法件
目录
• 结构力学概述 • 力学基础知识 • 结构力学力法原理 • 结构力学力法进阶技术
01
构力学概述
结构力学定义
• 结构力学定义:结构力学是研究和描述物体在外部载荷作用下 的平衡规律和变形规律的学科。它是固体力学的一个分支,广 泛应用于建筑、航空航天、机械工程等领域。
结构力学的研究对象和内容
02
力学基
静力学基 础
01
02
03
静力学基本概念
介绍静力学的研究对象、 任务和方法,阐述静力学 基本概念,如力、力矩、 平衡等。
静力学公理
阐述静力学公理,如作用 与反作用公理、合力矩定 理、重心定理等,以及其 在解题中的应用。
约束与约束力
介绍约束的概念及分类, 分析各类约束对物体运动 的影响,掌握约束力的求 解方法。
弹性力学基础
弹性力学基本概念
介绍弹性力学的研究对象、基本假设和任务,阐述弹性力学基本概 念,如弹性体、变形、应力、应变等。
结构力学力法
结构力学力法结构力学是研究物体在外力作用下变形、破坏及承受载荷的学科。
而力法(Force Method)是结构力学中常用的一种分析方法,通过分解和叠加结构的内力来求解结构的变形和应力分布。
力法的基本原理是牛顿第三定律:作用力与反作用力大小相等、方向相反。
在结构力学中,物体在外力作用下会产生内力,而这些内力满足力的平衡条件。
以简支梁为例,梁受到上面的外力作用,会产生下方的支反力。
根据力的平衡条件,可以得到支反力与外力之间的关系,进而求解出支反力的大小和方向。
力法的应用步骤一般如下:1.设计空间内部力和位移:根据物体的几何性质、材料特性和外力条件,建立结构受力模型,并假设结构内部力和位移的初值。
2.材料模型:根据结构的材料特性,选择相应的力学模型。
常见的材料模型包括弹性模型和塑性模型。
3.受力平衡:根据物体在力的作用下的平衡条件,可以得到各个节点处的力平衡等式。
这些等式可以根据结构的几何特性和受力条件进行推导,建立结构的力平衡方程。
4.结构刚度矩阵:根据结构的几何性质和材料特性,可以得到结构的刚度矩阵。
刚度矩阵是结构的一种特征矩阵,描述了结构在受力下的刚度特性。
5.定义单元力和变形:根据结构的力平衡方程和刚度矩阵,可以将结构的内力和受力位移表示为单元力和单元变形的叠加形式。
6.求解结构内力和位移:通过迭代的方法,将结构的内力和位移从初值迭代到收敛。
在每一次迭代中,根据力的平衡条件和结构刚度矩阵,计算节点的内力和位移,然后更新节点处的单元力和变形。
7.结果分析:根据结构的内力和位移,可以进一步分析结构的应力分布、变形形态和稳定性等问题。
根据需要,还可以根据结果对结构进行优化设计。
力法的优点是简单、直观,适用于各种结构的分析。
但力法也存在一些限制,比如只适用于小变形、线性弹性结构的分析;不适用于存在局部破坏、非线性特性的结构。
总之,力法是结构力学中一种常用的分析方法,通过分解和叠加结构的内力来求解结构的变形和应力分布。
结构力学——力法
结构力学——力法结构力学,力法结构力学是研究物体和结构受力情况以及结构变形的一门学科。
在结构力学中,力法是一种重要的分析方法之一,它可以用来解决结构的内力和位移分布问题。
力法的基本思想是将外力作用在结构上的效果转化为力的剪力、弯矩和轴力等,通过求解这些内力来得到结构的受力和变形情况。
力法的基本步骤包括:选择适当的受力系统,根据受力系统的特点将受力转化为剪力、弯矩和轴力等力的效果,通过平衡条件得到内力分布方程,并解析或计算出内力分布,最后计算结构的位移和变形情况。
力法的应用范围较广,适用于静定和非静定结构的受力和变形分析。
在静定结构中,结构的支座反力可以通过受力平衡条件求解,然后根据支座反力和结构的几何形状得到结构的内力和位移分布。
在非静定结构中,由于受力平衡条件无法直接求解,需要通过引入位移相关的方程来解决。
在应用力法进行受力分析时,需要根据结构的几何形状和受力情况,选择适当的受力系统。
受力系统的选择应当符合结构的几何特征以及边界条件,使得受力效果可以直接转化为剪力、弯矩和轴力的效果。
通常情况下,剪力和弯矩用受力系统的剪力图和弯矩图来表示,而轴力则通过受力系统的轴力图来表示。
在进行力法计算时,首先需要确定受力系统的作用点和力的大小,然后通过受力平衡条件求解支座反力,并根据支座反力和结构的几何形状构造内力分布方程。
内力分布方程一般根据结构的受力特点,可以通过积分法、均布加载原理、等效剪力原理等构造。
然后,通过解析或计算的方法求解内力分布方程,得到结构的内力分布情况。
最后,根据内力分布和结构的弹性特性,可以计算出结构的位移和变形情况。
力法在结构分析中具有广泛的应用,可以用来解决梁、柱、桁架、刚架等结构的受力和变形分析问题。
在实际工程中,通过力法可以得到结构的内力和位移分布情况,从而评估结构的稳定性和安全性,指导结构的设计和施工,并对结构的荷载承载能力进行估算。
总之,力法是一种重要的结构力学分析方法,通过将受力效果转化为剪力、弯矩和轴力等,可以求解结构的内力和位移分布情况。
《结构力学力法》课件
力法的解题步骤包括构建基本体系、选择基本未知量、建 立线性方程组和求解线性方程组等。
力法的应用范围
静定结构和超静定结构的分析
01
力法可以用于分析静定结构和超静定结构的内力和位移,特别
是对于超静定结构的分析具有重要意义。
复杂结构的分析
02
对于复杂结构,如组合结构、多跨连续结构和空间结构等,力
法同样适用,能够提供有效的解决方案。
边界条件和支座反力的处理
03
力法能够方便地处理结构的边界条件和支座反力,使得问题得
到完整的解决。
力法的解题步骤
构建基本体系
首先需要将原结构拆分成若干个基本体系,以便 于应用力法公式。
建立线性方程组
根据力的平衡和变形协调条件,建立线性方程组 ,并求解该方程组以得到位移和内力。
《结构力学力法》ppt课件
目录
• 引言 • 力法的基本原理 • 力法的实际应用 • 力法的扩展知识 • 总结与展望
01
引言
结构力学的重要性
1
结构力学是土木工程学科中的重要分支,是研究 结构在各种力和力矩作用下的响应和行为的学科 。
2
结构力学对于工程结构的稳定性、安全性和经济 性具有重要意义,是工程设计和施工的基础。
缺点总结
力法需要预先设定结构的初始应力状态,有时难以确定。 力法对于非线性问题的处理能力有限,对于高度非线性结构可能需要
采用其他方法。 力法在处理复杂边界条件和连接时可能存在困难,需要特别注意。
力法在未来的应用前景
随着科技的不断进步和应 用需求的不断提高,力法 在未来的应用前景广阔。
随着新材料和新结构的出 现,力法将面临更多的挑 战和机遇。
力法的计算机实现
结构力学课件--6力法3

15 4m
11
MkN m
M
M 1 d = 1 x 4 2 0 4 0 1 3 6 0 4 0 1 3 1 0 4 5 EI1 2 2 2 1 2
2019/10/9
=4 0 3 0 3= 0 40 课件
25
M
1
M
M
1
M 2019/10/9
y ds EI
M2 =y N2 =cos Q2 =sin
另选座标 xoy 则 y=ya
2019/10/9
12 = yE ad I= 课s件 E yd I s aE 1dIs
y y´
令 12=0 则
13
X2
X1
X2 y
X1 a
y
O
x
x'
a
=
y 1 EI
列方程
N1 =cos
11=
y2 ds EI
co2s
ds EA
2019当/10/9f /l<1/4 时,可取ds=dx 课件
X1
= 1P
11
=H
y与的计算
8
X1
X1=1
在竖向荷载作用下
9
MP=M° M1 = y N1 =cos
M =M M 1X 1=M Hy
M 课件
M
ds=
1P
l N12dx= l 12 dx= l
0E1A1
0E1A1 E1A1
1 1 =M E 1 2d I sN E 1 2d A sE 1 lA 1=1 1E 1 lA 1
两类拱的比较: 无拉杆 H = 1P
11
E1A1 H H 相当于无拉杆
《结构力学力法》PPT课件
2、刚架:
3、桁架:
第八章 力 法〔Force method〕 §8-1 超静定构造的概念
4、拱:
5、组合构造:
第八章 力 法〔Force method〕
§8-1 超静定构造的概念 三、计算方法
平衡 ( 条 受 件 力 equ ) im l- ibriu 真实 物 解理 答条 件 力 ( ) 变位
2、超静定构造 ——在任意荷载作用下,其全部内
力、反力不能单用静力平衡条件求出的构造。 (Statically indeterminate (redundant) structure)
几何特点:几何不变,有多余约束。
第八章 力 法〔Force method〕
§8-1 超静定构造的概念 二、种类
1、梁〔连续梁〕:
未知力的位移
“荷载”的位移
消除两者差异 总位移等于已知位移
变形协调条件 力法典型方程
(The Compatibility Equation of Force Method )
多余约束的位置不唯一
第八章 力 法〔Force method〕 §8-2 超静定次数确实定
去掉一个铰相当于去掉两个约束
X1 X2
第八章 力 法〔Force method〕
§8-2 超静定次数确实定
去掉一个固定端相当于去掉两个约束
X3
X1
X2
切断一个梁式杆相当于去掉三个约束
第八章 力 法〔Force method〕
2、解除多余约束,代之以相应的多余未知力。
超静定次数===将原构造转化为静定构造必须
解除的约束〔代之以相应反力〕数。
x2
x1
x1
x2
x2 x1
x1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
15.3 力法的计算步骤和示例(二)
一次超静定钢架
【例】作图 (a)所示连续梁的内力图。
EI 为常数。
【解】(1) 选取基本结构 此结构为一次超静定梁。
将B 点截面用铰来代替,以相应的多余未知力X1代替原约束的作用,其基本结构如图 (b)所示。
(2) 建立力法方程 位移条件:铰B 两侧截面的相对转角应等于原结构B 点两侧截面的相对转角。
由于原结构的实际变形是处处连续的,显然同一截面两侧不可能有相对转动或移动,故位移条件为B 点两侧截面相对转角等于零。
由位移条件建立力法方程如下
δ11X1+Δ
1P=0
(3) 计算系数和自由项 分别作基本结构的荷载弯矩图MP 图和单位弯矩图M1图,如图19.13(c)、(d)所示。
利用图乘法求得系数和自由项分别为
(4) 求多余未知力 将以上系数和自由项代入力法方程,得
(5) 作内力图 ① 根据叠加原理作弯矩图,如图 (e)所示。
② 根据弯矩图和荷载作剪力图,如图 (f)所示
11212(11)233l
l EI EI
δ=⨯⨯⨯=
2
1(32)48P P ql l EI
+∆=-
2
112(32)0348(32)32
l P ql l X EI EI
P ql l X +-=+=
15.3 力法的计算步骤和示例(三) 铰接排架
【例】计算图 (a)
所示排架柱的内力,并作出弯矩图。
【解】(1) 选取基本结构 此排架是一次超静定结构,切断横梁代之以多余未知力X1得到基本结构如图 (b)所示。
(2) 建立力法方程 δ11X1+Δ
1P=0
(3) 计算系数和自由项 分别作基本结构的荷载弯矩图MP 图和单位弯矩图M1图如图 (c)、(d)所示。
利用图乘法计算系数和自由项分别如下
(4) 计算多余未知力 将系数和自由项代入力法方程,得
解得
X1=-5kN
(5) 作弯矩图 按公式M=M1X1+MP 即可作出排架最后弯矩图如图 (e)所示。
13521760
033X EI EI
+=
15.6 超静定结构的位移计算 一次超静定钢架
用力法计算超静定结构,是根据基本结构在荷载作用和全部多余未知力共同作用下内力和位移应与原结构完全一致这个条件来进行的。
也就是说,在荷载及多余未知力共同作用下的基本结构与在荷载作用下的原超静定结构是完全相同的。
计算超静定结构的位移时可以用原超静定结构已经求出的弯矩图与静定的基本结构的单位荷载弯矩图用图乘法求位移,具体步骤是:
(1) 绘出原超静定结构的弯矩图(即MP 图)
;
(2) 选择一个最简单的基本结构作为虚拟状态,并绘出相应的弯矩图(即M 图); (3) 按图乘法求位移。
【例】试求图 (a)所示超静定刚架横梁BC 中点D 的竖向位移ΔDV 。
【解】绘出刚架的弯矩图如图(b)所示,再将此图改成易于图乘的简单的图形组合,如图(c)
所示。
采用悬臂刚架作为基本结构,并绘出单位荷载作用于D 点的弯矩图如图(d)所示。
因此
22241213172
(43282123181)23033()160DV qa a a qa a a EI qa a a qa EI ∆=
-⨯⨯⨯⨯+⨯⨯⨯+⨯⨯⨯=↓
16.1 位移法的基本原理
本章重点介绍建立典型方程这种方法,要求熟练掌握位移法基本结构的确定、位移法方程的建立、系数及自由项的计算以及结构内力图的绘制。
学习本章的目的,除主要为掌握位移法的基本原理和计算方法外,还为以后学习其它的超静定结构计算方法如力矩分配法等打下基础。
位移法是以节点位移作为基本未知量
求解超静定结构的方法。
位移法是以结点位移(线位移和角位移)作为基本未知量,以单跨梁系作为基本结构的。
结构的结点位移对于基本结构中的单跨梁来说是杆端位移,分布在结构上的荷载表现为单跨梁的荷载。
在位移法计算过程中,需要建立各等截面直杆的杆端力(杆端弯矩和杆端剪力)与杆端位移、杆上荷载的关系式,通常称这种关系式为转角位移方程。
图20.1(a)所示刚架结构在荷载作用下,截取杆件AB如图20.1(b)所示,用MAB和MBA 表示杆端弯矩,QAB和QBA表示杆端剪力。
杆端弯矩正负号规定为:对杆端而言,杆端弯矩以顺时针转向为正;对结点或支座而言,则以逆时针转向为正(图20.1(c))。
图中所画的杆端弯矩都是正的。
图20.2(a)所示两端固定梁AB,A、B端分别发生转角φA、φB,两端产生垂直于梁轴的相对侧移Δ,其中AB′与水平方向的夹角称为弦转角,用φAB或φBA表示。
以上各种位移的正、负号规定为:杆端转角φA、φB以及弦转角都以顺时针转角为正;线位移Δ的正、负号应与弦转角φAB一致,即右端下沉、左端上升为正。
图20.2中所画各种位移均为正。
为区别杆端位移产生的杆端力,我们把荷载在梁上产生的杆端弯矩、杆端剪力称为固端弯矩、固端剪力,并以MF、QF表示。
图20.1
图20.2
16.2 位移法的基本未知量与基本体系
力法的基本未知量是未知力,
位移法的基本未知量是节点位移。
(节点是指计算节点)。
节点位移分为节点角位移和节点线位移两种。
每一个独立刚节点有一个转角位移(基本未知量),是整个结构的独立刚节点总数。
角位移数为6 角位移数为1
对于结点线位移,由于忽略杆件的轴向变形。
这两个节点线位移中只有一个是独立的,称为独立节点线位移。
独立节点线位移为位移法一种基本未知量。
独立节点线位移的数目可采用铰接法确定(即将所有刚性结点改为铰结点后,添加辅助链杆使其成为几何不变体的方法) 。
“限制所有节点线位移所需添加的链杆数就是独立节点线位移数”。
独立节点线位移数为1 独立节点线位移数为2
16.3 位移法的典型方程
基本结构受荷载及结点转角Z1、Z2共同作用,根据基本结构附加刚臂上的反力矩等于零这一条件,按叠加法可建立位移法典型方程如下:
r11Z1+r12Z2+R1P=0
r21Z1+r22Z2+R2P=0
例如:r11为Z1=1产生的刚臂1的反力矩,r12为Z2=1产生的刚臂1的反力矩,R1P为荷载产生的刚臂1的反力矩;r21为Z1=1产生的刚臂2的反力矩,r22为Z2=1产生的刚臂2的反力矩,R2P为荷载产生的刚臂2的反力矩。
无结点线位移(无侧移)钢架的计算
【例】用位移法计算图(a)所示刚架,并绘M图。
【解】此刚架具有两个刚结点B和C,无结点线位移,其基本结构如图(b)所示。
列位移法典型方程:
r11Z1+r12Z2+R1P=0
r21Z1+r22Z2+R2P=0
分别绘出M1图(图(c))、M2图(图(d))和MP图(图(e))。
各系数和自由项分别计算如下:r11=∑M杆端=4i+8i=12i
r21=r12=4i
r22=8i+6i+4i=18i
R1P=∑M固端+m=-26.67-10=-36.67kN·m
R2P=26.67-30=-3.33kN·m
将上述所求系数和自由项代入位移法方程,解得Z1=3.23/iZ2=-0.53/i 按叠加法公式M=M1Z1+M2Z2+MP绘出最后弯矩图如图(f)所示。
有结点线位移(有侧移)钢架的计算
【例】用位移法计算图1(a)所示刚架,并绘M 图
【解】此刚架具有一个独立转角Z1和一个独立线位移Z2。
在结点C 加入一个附加刚臂和附加支杆,便得到图1(b)所示的基本结构。
根据附加刚臂和附加支杆上的反力矩和反力应等于零的条件,可建立
位移法方程如下:
r11Z1+r12Z2+R1P=0
r21Z1+r22Z2+R2P=0
分别绘出M1图(图1(c))、M2图(图1(d))和MP 图(图1(e))。
求第一个方程中的系数和自由项:这些系数和自由项都是刚臂的反力矩,可根据物理意义由刚臂所在结点的平衡条件∑M=0求出,实际上可按由此平衡条件推出的相应公式直接写出。
由M1图:
r11=∑M 杆端
=3i+4i=7i
由M2图:
r12=-3/2i
由MP 图:
R1P=∑M 固端
=0
求第二个方程中的系数和自由项:这些系数和自由项都是附加支杆的反力,可根据物理意义由包含附加支杆反力的截面平衡条件∑X=0求出,或按由此平衡条件推出的相应公式直接计算。
求r21可在M1图上经二柱顶引截面,根据柱端弯矩计算出作用于柱顶的剪力,取其上部为隔离体(图2(a)),由∑X=0:
r21-QCD=0 故
r21=QCD=r12
为求r22,可在M2图上引截面,由隔离体(图2(b))的平衡条件∑X=0,可推出计算公式如下:
22221
2123i i
r l l
=+∑∑
∑被截柱顶剪力=
对于本例:
同理可求得R2P ,由MP
图:
R2P=∑被截柱顶剪力
+P
故
R2P=-60kN 将上述所求系数和自由项代入位移法方程,解得
Z1=20.87/I Z2=97.39/i 按叠加法公式M=M1Z1+M2Z2+MP 绘出最后弯矩图如图1(f)所示
图1
图
2 2222121231544
16i i i r =+=∑∑。