YSGL2#-1-9
猫课蒋晖电商狮友会苏博士:团队管理分享,20个人操作16个店铺,月利润达20万!
今天分享的这位学员,18年4月份报名的课程,到现在已经拥有20人的小团队,目前共有16个店铺,单店铺访客有3000左右,订单在维持在80,总共一个月利润就有20万+!他在团队运营方面很厉害,不仅仅是课程里的东西,还结合了自己的一些想法,因地制宜,从招人怎么招人,招什么人,到最后怎么培训,怎么分工,怎么分配岗位,都有自己详细的规划,目前还准备扩大团队规模。
[MISSING IMAGE: , ]分享嘉宾介绍大家好,我叫老江,来自江西九江。
我之前在一家上市公司工作,工资一个月有一两万,还算是不错的,但是和做淘宝的兄弟比起来,可就小巫见大巫了,我是17年年初入门淘宝的,正式上手操作是在 17年的8月份。
之后经过朋友的推荐加了蒋校长的微信,在朋友圈看到了关于苏博士的无货源课程,也咨询了苏博士,就抱着试一试的心态在18年4月底报名了课程。
当时一边学习一边操作,5月份当月就做了两个店,每个店的销售额在1万多,到6月份销售额累计有3万多将近4万,7月份的开始组建了团队。
店铺主要玩法是裂变,这期间也遇到了店铺滥发、人员离职等情况,经过一年多的沉淀,现在团队总共20个人,8个运营、6个客服、2个采购,3个推广,1个综合负责采购对账、推广对账、售后盘点等,之后还计划招财务、美工、推广人员。
[INVALID DATA URI:data:image/png;baxxxxse64iVBORw0KGgoAAAANSUhEUgAAACEAAAAcCAYAAADvANYcAAA G50lEQVRIS62WzXNbVxmHn3M/JVmKrdgKsRP5M7WTOJhhhgHKBrIBNu0yLfkDWHWmk2GYl m5YsGigM3X/iNKQgRXToYHpgrDoDHTakMS13ViyLdmWZVmWrM97db8Oc+UkjRPXdRLO5ur cc859H/3ej/MKDhmy0h7eKWxe9iUXT0yPn8cnVV1Ydq1me31o5kKOgH/WFrau9/3g5Mph3/m mNXHQhtA4yejVzf/eu2SYhto/PgqWQ6VQoF6vMzozA4GknF0FTwQDZ0evo/CmiIn8Nxk8aP0JC NnyXiamvt9eLSUajQbfmp4AG2pLyxjRCNHBFKga1VyeiG4QPXkSgoCtzFLTMI1fHr8wce1pQfZBS Fu+Tsd5t7q5pSh+QO/ECARQz6/jdxyS6dPQa7C9lMO3OpycPAOKoJTNotgdBianJJr/KxGLzD4N yEMI2ZGvILhWzeRE3Iiip1IgBOXMImrEJDk8DFGVZmYDx7I5fn4C2hbVfA5DU+lJp8Ewqc8tSD0e +0Vsauz6UUG6EN0Y0PQvqoXNeFwz0YdOgAu1bBbVUIiPDIOmsrW6it7x9wA8SWE5g+sHjMx M4bUl+XwexVMZnTzdtAymY+JoMbIHUev8sbq5dbnHiGD0DwACb7tEo9UkOZoGVcUulqg3m5 w4f6YLuJ3JYhsRes6eog4s5jsUqxUCRafVdtGE6blekFF0Mm3ER9VI/7WrM6J6YGDKqjVS3dpe9jxP SY2PgQe1TJZAFSRfGAcNdpcyWK7D4AtTXYBCvoCnRzh9NsXf8gHzW2VcRcNVFALNAKlhoqGq Ci27033X0cWu4/BOcWl99s+X0tajMGLj8/k3Yj2Jq31h0IUGF1eIGibm4CCoUF6cQ4np9E4MoWp R8p/lIDaAPtXHR3dblIIAW9UIUPCRSBSklAip7NlRBIEAX2jdqQ5zVqX40nsXB1cfgIjKYv5Gcjj9M3yf 7eVVorEo8fRQV5GdpXtENOgZPYWvuizni6hBL8eGB7n++Q616DFsTcG9by803nXv/Wf4W4j9VS BcUxV13bc6L/7hh7H17h7ZkusE/il7vUi7Y3M8dIEqCOdWo0FyZBBkQKtUoSJUlIk0H88XyTUURM 9xnDB+ngJC17Uw6fA8/1N7cfPHs5fSlpCOtLcXsqbiS/rPngljko2lDIYUpKYmwOnQuJcl0CL0fmecf 5UDbubWcPXj2L6OouzJ/Og4TAnbtkkk4jiOS5L2W7/5bt/bovCfeTsSj5nJsZFuDGzcmqc3niAeZo UO3pdLNGyb5LlvU1TgL1/k2THjtLQIHV/FkCpKsCfFo8Yf+vsxdyCCh7yq79ZMe2dc1O+urifGR04 hfTaWV+hVTeIj6fCLlJcz9OkK2tApHCPCx9ky805A1YzRUlUCNHRXoAV7wXhg+h0C0QUP5GtCN uXfCfyf1gubdDodUmcmupdTo1DA6Vj0jw6C0FizDG6ulFiJRKkZBr4MA05B80RXiSNDPEbqIz8Usi PfKC1krgoJqTAmNNhayKKE87AytlpsliqUzBR3ag4ZadDUw1rgd/eE+fdcEII1Ub21MKrq0WwifVo ByU4uj+95nDg/CY7EyW9Q10yYSvGnT4uU9H4sVUeIECJAhoo8qAlHuizup9JXe529sr3rXcNQX2 0VNgmv75NTk+BLaqtrRKSOOTnIrgnX/l2grKdoqzpS8UMZ/o8QbTlczmS/ICA+ELrAlWzfy6JJleS 5MfBhcWuXzzZrFPUBdo0YHc3DV0Dx99xx1BFWz30lW7L28FX+9pevps9NfoArxXYuh3B8BkYno OOxW61QBpbaLgtehJqZoKPIbqkO3fF8EPLDfVx+0369Udx5121aykCYJT44+SKWDDg2OcSdWp sbuTJWzwDtRgczEsdFxRdHV+JxxUTAa0+0dxu3F18eOjf1PioJO7uFW7dJTI90z94tb/GPYgsrkUI4 Oq6nYivPDqH5Xi1it8cPbnTbcri2uvZ7xZOXEiPDSljKm8UVKtEot0QPcxUbnxhtV0WqBsEzKpFwG 2/99nvH3j4Q4oFksi2HCbi8UyhcVAN72hwdO7FoCm7crVC3At0Juwaz51CIbi3p5tH9cd+ikMGc1 y58f/ZHaetQiK+L+CuflM4kjMhNVY8MOYqOH/YLQbfS7xshgPQDPC8g0qPRsiEWAenJDaGLn1y dFpnwwDNBhAd/d9sac131rx1NvWB7Pqaph53/ExDh7WwYAidUQ4IaMGdZ9kvvvRj9qqk5an4ftO/KJzKqRbmi6fza8WRf9189cmGFSuhh7+AGOAq7ilTeCbLMzl4S+9u754F4cPbNOzJpu8HlwHd/ runGjBBiMFxTJZv43h0hlBtCVz74ukb3f5HqXM4KiTHaAAAAAElFTkSuQmCC店铺现状先讲一下目前我的店铺情况,现在共16个店,其中有两个售假,另外也有违规比较多的、滥发的店,这些店我基本是拿来测试用的。
轨道电路两种编码方式的衔接探讨

Technological Exchange
技术交流
采用 Z P W -2000A 轨道电路,T C C 编码。两种轨 轨道电路,电码化设备采用 Z P W -2000A 型,上行
道电路编码方式在夏家线路所进站信号机 TS、TSN 咽喉为 18# 道岔,下行咽喉采用 12# 道岔,设置计
处衔接,最高码序为 L 码。夏家线路所和哈尔滨西 算机联锁、TCC。SB、SBN 口直向接发车进路和正线
YY
TY
64
YJY
TJY
65Leabharlann YJJJTWJJJ
9 YWJJ
TWJJ
Y7
T7
णዐ൶
TO
՟ ዞ
၍ TCO
264 TC
T णዐ൶
ࡘഋਜ਼ጆ
号机信号显示红黄、红白、双黄、黄 闪黄、绿黄、绿灯与低频码 H U 码、 HB 码、UU 码、UUS 码、LU 码、L 码一一对应。 当最高码序为 L5 码时,进站信号机信号显示绿灯, 对 应 的 低 频 码 有 L 码、L2 码、L3 码、L4 码、L5 码,还要结合前方闭塞分区状态信息进行编码。在 场景一中,当进站信号机显示黄灯时,进路情况可 能有直向接车进路(即在股道将收到 H U 码)、直 进弯出通过进路且发车进路为 18# 及以上道岔(即 股道发送 UUS 码)或直进弯出通过进路且发车进 路为 18# 以下道岔(即股道发送 U U 码),相应 的进站信号机接近区段低频码序为 U 码、U2S 码、 U2 码。当继电电路编码侧车站设置 T C C 及安全数 据网设备时,该 T C C 可以依据本站计算机联锁提 供的进站信号机显示及采集到的本站闭塞分区继电 器状态信息,进行进站信号机接近区
UU 灯,夏家线路所 TCC 需要采集继电器条件进行 区空闲,但不包含发车进路和离去区段列控限速状
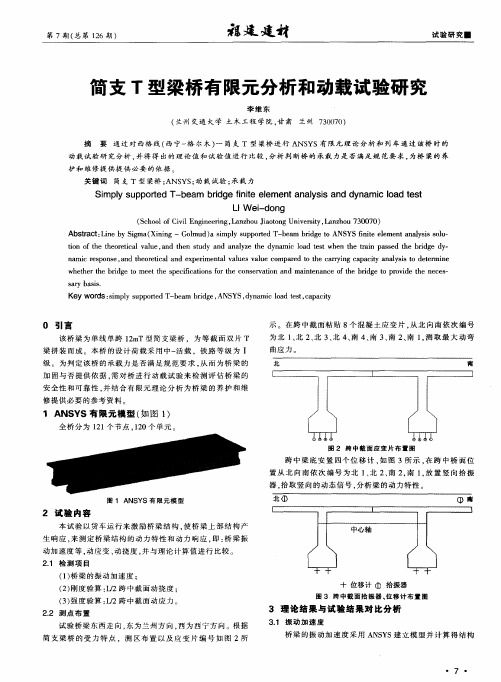
简支T型梁桥有限元分析和动载试验研究
一
度 均不 满 足 《 铁路 桥 梁 检 测 规 范 》 要 求 , 而 难 以保 证 列 年 的 从
以 现行 规 定 的 速 度 过 桥 时 的安 全 性 ,建 议 对 该 桥 进行 加 固 , 根 据 检 测 结 果 结 合 现 有 加 固技 术 . 议 在 梁 底 受 拉 部 分 料 岵 建 碳 纤 维 布且 梁 体 横 向 预 应 力 钢 筋 加 固 以 提 高 梁 的 强 度 和 刚
L e — o g I W id n (c o l f i l n ie r g L nh uJ oo gU i r t , a z o 3 0 0 S h o o v gn e n ,a z o i tn nv s y L n h u7 0 7 ) C iE i a ei A src : i ySg a X nn — om d as pys p o e - e m b d et A S Sf i l n a ayi sl - b t tLn b im ( i g—G l u ) i l p s d T b a r g N Y nt e me t n ls u a e i m u i o i e e so -
3 理 论结 果与试 验 结果对 比分析
3 1 振 动 加 速 度 .
试 验 桥 梁 东 西 走 向 , 为 兰 州 方 向 . 为西 宁方 向 。根 据 东 西
简 支 梁 桥 的 受 力 特 点 , 测 区 布 置 以 及 应 变 片 编 号 如 图 2所
桥 梁 的振 动 加 速 度 采 用 A S S建 立 模 型 并 计 算 得 结 构 NY
33 跨 中 拉 应 力 值 .
{ 啊 j — _!一 l h 喝I 鼍 门 _ 孵
压力表型号规格
压力表型号含义解析通用的意义有这些,但具体到不同的厂家还有不同的含意在仪表型号表示中:Y表示压力,Z表示真空或阻尼,B表示防爆或标准,J表示精密或矩形,A表示氨表,X表示信号或电接点,XC表示磁助电接点,P表示膜片,E表示膜盒,F表示防腐,N表示耐震,T表示弹簧管,B表示不锈钢等等.我们常用的有:YTF表示不锈刚压力表') ,YA表示氨用压力表') ,YXC表示电接点压力表') ,YZ表示真空压力表') ,YY表示乙炔压力表') ,YO表示耐热压力表') ,YH表示氢气压力表') 等等YQ、YQF系列两级压力调节器主要适用于输入压力需要精密控制和调整的分析仪器、环保仪器设备、电力工业、以及其它仪器和设备.还适用于无腐蚀性(YQ系列)或有腐蚀性(YQF 系列)的纯气及标准混合气体,对钢瓶气体的高压气源进行精密调节后,送入仪器设备。
主要技术参数:1、型号及参数技术参数/ 型号YQ-1 YQ-2 YQ-3 YQ-4 YQ-5YQF-1 YQF-2 YQF-3 YQF-4 YQF-5输入压力表量程(Mpa)0~25 0 ~25 0~25 0~25 0~25输出压力表量程(Mpa)0~0.6 0~0.16 0~4 0~0.25 0~1压力表等级2.5 2.5 2.5 2.5 2.5输入压力(Mpa)≤18.5 ≤18.5 ≤18.5 ≤18.5 ≤18.5输出压力(Mpa)≤0.45 ≤0.12 ≤3 ≤0.2 ≤0.75额定流量(m3/h)0.6 0.06 1 0.2 0.62、稳定性:气源压力在5~15MPa范围内,进口压力每变化1MPa,出口压力的变化不大于7*10-4MPa3、流量特性:在进口压力大于2MPa时,调节流量在额定范围内变化,输出压力变化不大于输出压力表测量上限时的6%4、安装连接:a.入口端:G5/8"(左、右旋),W21.85 14牙寸(左、右旋)b.出口端:M10*1; M8*1软管接头等.三、适应气体:YQ系列H2、O2、N2、CH4、CO、CO2、He、Ne、Ar等非腐蚀性气体YQF系列NH3、SO2、H2S、HCL、NO等腐蚀性气体.产品名称:丙烷压力表产品型号:YW-60产品名称:氩气表产品型号:Yar-60/100产品名称:氢气压力表产品型号:YQ-60产品名称:乙炔压力表产品型号:YY-60/100/150产品名称:二氧化碳表产品型号:YC-60/100产品名称:氧气压力表产品型号:YO-60/100/150无锡惠华,压力表质量各方面都不错!压力表系列:一般压力表Y真空压力表YZ电接点压力表YXC燃气压力表YR船用压力表YC留针(记忆)压力表YL绝压表YJ水压表Y油压表Y气压表Y氧压表YO氨压表YA乙炔压力表YY氢气压力表YQ矿用压力表YKY耐高温压力表YGW双针双管压力表YZS-102定位压力表YD耐(抗)震系列:耐震压力表YN防震压力表YN耐震真空压力表YZN耐震电接点压力表YTXC耐震不锈钢压力表YNBF耐震隔膜式压力表YNBF--MF/ML/MK…耐震远传压力表YNYC耐震差动远传压力表YTTN耐震精密压力表YBN抗震差压表CYWN耐震膜盒压力表YEN耐震膜片压力表YPN耐(防)腐系列:隔膜压力表Y--MF/ML不锈钢压力表YBF不锈钢隔膜压力表YBF--MF/ML卫生型隔膜压力表Y--MK不锈钢膜盒压力表YE--B不锈钢膜片压力表YP--F不锈钢耐震压力表YNBF不锈钢差压压力表YBF-CA不锈钢安全型压力表CYB不锈钢远传隔膜压力表YTZ(YTT)--BF/MF/ML数字系列:数字压力表YS数显压力表YS智能数字压力表YS数字压差表CYG数字精密压力表YS传感(变送)系列压力变送器YSZC压力传感器YSZC差压变送器1151电感压力变送器YSG小巧型压力变送器YSZC微压系列:膜盒压力表YE膜片压力表YP不锈钢膜盒压力表YE--B不锈钢膜片压力表YP-F远传系列:电阻远传压力表YTZ差动远传压力表YTT耐震电阻远传压力表YTZ…Z耐震差动远传压力表YTT…Z隔膜远传压力表YTT-MF/ML精密系列:精密压力表YB精密数字压力表YSJ防爆数字压力表YSB压力控制电接点系列:压力继电器PD-H-L1(L2)电接点压力表YXC耐震电接点压力表YTXC磁助电接点压力表YXC磁感电接点压力表YXCG磁敏电接点压力表YXCM磁簧电接点压力表YXCH光电耐震电接点压力表YXD-Z耐震磁感电接点压力表YTXCG防爆感应电接点压力表YTXCG磁助电接点压力表(大功率)YXC 耐震光电信号电接点压力表YXXD 防爆电接点压力表YTXC--B高压系列高压压力表YG高压精密压力表YG-B防爆系列防爆压力表YTB防爆电接点压力表YTX温度系列WTZ/WTQ压力式温度计WSS/WSSX双金属温度计压力表附件:压力表垫片压力开表开关压力表截止阀压力表阻尼器压力表转换接头压力表缓冲器(管)压力表针型阀(考克)。
必看婚前婚后领悟的事儿
必看婚前婚后领悟的事儿!本文非常精辟。
把婆媳关系写的淋漓尽致。
婚后一年领悟的事~杯具VS洗具哦~无论是未婚还是已婚的朋友,都一定要看下!婆媳关系:婚前:我一定要做个好人,孝顺我和他的爹妈婚后:孝不孝顺不是我做什么能改变的,是爸妈觉得你孝顺你什么都不用做也孝顺,觉得你不孝顺做啥也没用婚前:只要乖巧孝顺就能讨好公婆,就能皆大欢喜,相安无事婚后:乖巧有时候会事得其反,因为人性就是马瘦就更要骑。
保持距离叫防身。
否则单纯和软弱让人看出来,就是在自己头上写了“请欺负我”这四个字。
婚前:人心换人心,对人家好,人家会回报你;婚后:人心换不回狗心的。
婚前:都说婆媳关系难处,我想,我八面玲珑的,应该能处好。
婚后:婆媳关系太TM难处了。
婚前:可以做婆婆的女儿婚后:婆婆永远是婆婆,妈妈永远是妈妈。
经济:婚前:钱算什么,爱是第一位的。
婚后:什么是爱?给你钱就是爱,不给钱就不是。
婚前:爱情第一,态度决定一切。
婚后:金钱第一,责任感决定一切。
婚前:我的钱、老公的钱都是俩人的钱婚后:我的钱是我的钱,老公的钱是老公的钱,家里的钱是家里的钱婚前:老公是可以依赖的婚后:经济基础决定婚姻地位婚前:钱不是万能的婚后:没有钱是万万不能的婚前:月光族婚后:计划经济婚前:为我花钱不皱一下眉头婚后:开始劝我少在淘宝里购物婚前:老公家穷和我无关,没钱我们可以慢慢挣。
婚后:挣钱真tm难,最难的是不仅指望不了婆家,婆家还指望着我们养着。
一开始就找个有钱人家就好了。
婚前:结婚后就两个人到处去玩去旅游。
婚后:婚后旅游个屁,攒钱买房生孩子是正经孩子:婚前:有了孩子只要让他健康快乐的成长就可以了,不要给孩子太大的负担婚后:早起的鸟儿有虫吃,孩子只是玩是不够的。
婚前:虽然我不喜欢小孩不过生了后会自动有母爱的婚后:为什么一直哭啊?受不了了`~有谁帮我带到会读幼稚园了再还给我吧婚前:养孩子难。
婚后:养孩子怎么那么难。
婚前:年青时要多学习,拼事业;婚后:要是早点生孩子就好了。
癌胚抗原三维结构预测和构象分析

癌胚抗原三维结构预测和构象分析姓名陈耿佳学号 1301214752 组号 G01C1.研究背景1)搜索网络信息资源,简述癌胚抗原的研究和应用背景。
癌胚抗原(carcinoembryonic antigen,CEA)是存在于结肠癌及胚胎结肠粘膜上皮细胞的一种糖蛋白。
可广泛存在于内胚叶起源的消化系统癌,也存在于正常胚胎的消化管组织中,在正常人血清中也可有微量存在。
癌胚抗原是一个广谱性肿瘤标志物,它能向人们反映出多种肿瘤的存在,对大肠癌、乳腺癌和肺癌的疗效判断、病情发展、监测和预后估计是一个较好的肿瘤标志物,但其特异性不强,灵敏度不高,对肿瘤早期诊断作用不明显。
(参考百度百科)2)检索PubMed文献数据库,找出与癌胚抗原结构、功能及癌症相关的文献。
检索策略:("carcinoembryonic antigen"[Title/Abstract]) AND (structure OR functionOR tumor OR cancer [Title/Abstract])共检索到11378篇文献,其中646篇为Review。
按相关度排序,浏览部分文献,大部分为肿瘤标志物的相关研究及临床案例。
3)查看UniProt/Swiss-Prot数据库中人癌胚抗原CEAM5_HUMAN序列注释信息和相关链接,说明该蛋白质分子的序列特征、功能、组织特异表达,以及可能的调控网络。
登录号:P06731名称:Carcinoembryonic antigen-related cell adhesion molecule 5序列长度:702 aa(前体),经加工后成熟链长度为651 aa家族:免疫球蛋白超家族IgSF,癌胚抗原家族CEA功能:细胞表面糖蛋白,在细胞粘附和细胞内信号转导中起作用,是 E.coli Dr adhesin的受体亚基:可形成同源二聚体,结合配体是E.coli Dr adhesin后同源二聚体解离定位:通过糖基磷脂酰肌醇GPI锚定在脂双层(细胞膜)中分子处理:1-34为信号肽段,686-702在成熟链中被剪切掉,余下35-685为成熟链(651 aa)结构域:7个免疫球蛋白样结构域(Ig-like domain),分别为[35 – 144](110)、[146 – 237](92)、[238 – 322](85)、[324 – 415](92)、[416 – 498](83)、[502 – 593](92)、[594 – 677](84)修饰:Ala685酰胺化与GPI锚定;多个糖基化位点PDB结构:已测定的结构如下表所示(Å) Chain Positions Remark Entry Method Resolution1E07 X-ray - A 35-676 Complex with MFE232QSQ X-ray 1.95 A/B 34-144 Complex with Dr2QST X-ray 2.9 A/B 34-144 V39Cmutant 2VER NMR - N 35-144 Complex with Dr 互作蛋白:HNRNPM、C6ORF125、CEACAM6、CD209、EWSR1、CEACAM1、E-selectin、c3、llama single domain、draE、afaE3、UQCC2、VIPAR、VPS33B、SELE、VPS33A、STX12、ADRM1、STX8、RAB11A等。
MULTIGIG RT 2-R 多功能高速接口连接器说明书

IntroducingMULTIGIG RT 2-RRuggedized Connectors for VPX applicationspart configUrationssee TE drawings for guide module and pin options.see TE drawings for guide module and pin options.part configUrations see TE drawings for guide module and pin options.Notes (Reference VITa 46.10; Observation 3-6):Note 1: 16 column shell, 15 columns of contactsNote 2: 16 column shell, 7 columns of contacts present (plus contacts i9-16)Note 3: 16 column shell, 16 columns of contactsNote 4: 16 column shell, 8 columns of contacts present (plus contacts i1-8)associated VpX solUtionsMEZaLOK Mezzanine Connectors (Compliant to VITa 61)• U tilizes the proven, reliable MIL-55302 Mini-Box contact interface, with fourpoints of contact• B ackwards compatible with XMC board footprint• Accommodates 10mm, 12mm, 15mm and 18mm stack heights• Solder ball SMT attach in SnPb and RoHS options• 114 (6 x 19) positions and 60 (6 x 10) positions• Protected “stub-proof” socket contacts w/superior signal integrity• Exceptional solder joint reliability (1000+ cycles thermal shock)MULTI-BEaM XLE Power Connectors (Compliant to VITa 62)• 20A and 50A power contacts, plus signal contacts• 3-beam high-conductivity-copper contact design allows for a greater angularmisalignment between mating connectors and offers a lower mating force• Slim guide sockets reduce the overall PCB footprint• Vented housing allows for better heat dissipation• Hot-plug capableOptic Connectors (Compliant to VITa 66)• L ight weight• High bandwidth• EMI immunity• 3 fiber optic interface types available:- 66.1 has two MT ribbon ferrules up to 24 fibers each- 66.2 four ARINC 801 termini- 66.3 one expanded beam lensed insert with four fibersRF Modules (Compliant to VITa 67)• E xcellent channel-to-channel isolation and RF performance to 65 GHz• M odular design permits application specific configuration with high RFcontact count• F loat mounted jack maintains positive RF ground• .240 center-to-center spacing• 4 and 8 position modules are designed to meet the requirements ofVITA 67.1 and VITA 67.2MULTIGIG RT 2-R ConnectorsdescriptionTE’s MULTIGIG RT 2-R ruggedized, light weight, high speed board-to-board interconnect is compliant to VITA 46 standard. This connector systemfeatures the modularity and flexibility of the MULTIGIG RT 2 connector, with a new quad-redundant contact structure designed for high vibration levels.applicationsRugged embedded computing applications: - Ground Defense - Missile Defense - Electronic Systems / C4ISR - Space - Commercial and Military AerospacematerialsContacts: High performance copper alloy, plated 50 µin Au over50 µin Ni in mating area, tin-lead on compliant pin tails Housings:High temperature thermoplasticRugged Guide Hardware: Aluminum or passivated stainless steelmechanicalOperating Temperature: -55 to +105˚CMating Force: 0.75 N [2.70 ozf] maximum per contact, same as standardMULTIGIG RT 2 backplane connectorstandards & specificationsCompliant to VITA 46 (VPX)Product Specification: 108-2072Application Specification: 114-13056Qualification Test Report:501-544physical or other properties Tested to HALT (Highly accelerated life test) vibration levels(0.2G 2/Hz) per VITA 72Connector modules available for 3U and 6U VPX slot profiles,including rear transition modulesReliable press-fit termination, requiring only flat rock toolingLightest weight VPX connector system: mated set of connectors and guide hardware for typical module and backplane slots: 3U - 62.66g (2.21 oz); 6U - 140.26g (4.95 oz)KEy FEaTUREsQuad-redundant contact system supports high lev-els of shock/vibration Compliant to VITA 46 for Open VPX applications Supports Ethernet, Fibre Channel, InfiniBand appli-cations, PCIe and Serial RapidIO high speed protocolsModular, lightweight connector system Robust “pinless” interface Differential, single-ended and powerRuggedized guide hardware availableSupports 0.8 inch card slot pitchesVITA 46 compliance enables upgrade in existingVPX applications Can be combined with high power modules (VITA 62), RF modules (VITA 67) and Optical modules (VITA 66)FOR MORE INFORMaTIONTechnical supportInternet: /ADMamericas: +1 800 522-6752asia Pacific: +86 400 820 6015Europe:Austria: +43 1 905 601 228Baltic Regions: +46 8 5072 5000Benelux: +31 73 6246 999France: +33 1 34 20 86 86Germany: +49 6251-133 1999Italy: +39 011-401 2632Nordic: +46 8 5072 5000Spain/Portugal: +34 93-2910366Switzerland: +41 52 633 66 26United Kingdom: +44 800 267 666Czech Republic: +420 800 701 462Poland: +48 800 702 309Hungary: +36 809 874 04Russia: +7495 790 790 2Follow us on Twitter for all the latest product news@TEConnectivity, and on Facebook, TEConnectivity./aDM© 2013 Tyco Electronics Corporation. All Rights Reserved.1773466-4 ADM/RRD 2.5M 01/2013MEZALOK, MULTI-BEAM XL, MULTIGIG RT, TE Connectivity and the TE connectivity (logo) are trademarks of the TE Connectivity Ltd. family of companies.Other products, logos, and company names mentioned herein may be trademarks of their respective owners. InfiniBand is a trademark of the InfiniBand Trade Association.While TE has made every reasonable effort to ensure the accuracy of the information herein, nothing herein constitutes any guarantee that such information is error-free, or any other representation, warranty or guarantee that the information is accurate, correct, reliable current. The TE entity issuing this publication reserves the right to make any adjustments to the information contained herein at any time without notice. All implied warranties regarding the information contained herein, including, but not limited to, any implied warranties of merchantability or fitness for a particular purpose are expressly disclaimed. The dimensions herein are for reference purposes only and are subject to change without notice. Specifications are subject to change without notice. Consult TE for the latest dimensions and design specifications.。
鸿业CAD快捷命令(全)
新建... _new打开... _open关闭_close局部加载_partiaload保存_qsave另存为... _saveas电子传递... _etransmit网上发布... _publishtoweb输出... _export泵房设计菜单bfmnu用户自定义菜单usrdef切换下拉菜单cadhy页面设置... _pagesetup打印机管理器... _plottermanager打印样式管理器... _stylesmanager打印预览_preview打印... _plot图形属性... _dwgprops退出_quit设置工程名szgcm出图比例ctbl绘制图框htk图签填写tq设文字高swzg设置拾取框sqk设置线型比例xxbl标记点开/关bjd镜像图块转换jxzh天正5图转换tzzh已知器具转换yzqjzh任意器具转换ryqjzh删除特征文字scwz开/关图块属性文字sxwzkg改图形至0 层chla0改文字为设置字型ctmsty粗线变细cpl2l分解尺寸线expdim清除图中无用内容drub综合处理zytcl建筑设计jzsj连接器具ljqj 布置阀门fm布置排表bzpb 立管编号批量修改pllgxg 定义压力管高gsgg 定义重力管高zlgg 定义管道·参数dygdcs 加竖管标志csg竖管移动sgyd 图面选择绘系统图xzxtt 平面数据处理sjcl平面复制pmfz 平面生成pmsc 关联大样dybh 大样数据处理dysjcl 删除大样定义deldy 土建条件图tjtbar 消火栓给水立管xflg 消火栓给水管xfg布置消火栓xhs自喷给水立管zplg 自喷给水管zpg定义自喷管高zpgg 布置喷头pt定义喷头高ptg其它消防器材xfqc 连接消火栓立管xhslg 连接消火栓/喷头ljqj布置阀门fm定义管道·参数dygdcs 竖管标志csg竖管移动sgyd 图面选择绘系统图xzxtt 平面数据处理sjcl平面生成pmsc 给水管swgsg 污水管swwsg 雨水管swysg 定义管道dyswg 室内外管线连接jsnwg 地面标高jdmbg 定排水管坡psgp 定义管径dswgj 定沉泥井dcnj 节点编号jdbh标节点编号bjdbh 标注管道swgdbz 标注井管jgbz设置坐标关系zbgx CAD坐标标注txzb 测量坐标标注clzb图面处理swtmcl 自动绘轴测图sjxtt图面选择系统图xzxtt 大样系统图dyxtt 管径定义xtgjdy 变径标志bjbz绘制系统管道xtgd成组绘管czhg 系统图块…xttk系统阀件xtfj消防器材xxfqc 连通气管xltqg 系统水箱gpsxtsx 枝状移动zzyd 枝状伸缩zzss管道自动断线gdzddx 管道交互断线gdjhdx 图块自动断线tkzddx 图块交互断线tkjhdx 绘制原理图ylthz 排水计算wsjs气压罐cqyg 贮水池ccsc屋顶水箱sxjs膨胀罐spzg 化粪池hfc减压孔板jykb管道水力计算gdjs查看计算书kjss进出管标注bpjcg 标管代号gdhbz 标高前缀bgqz 标高标注bgbz 标高引出标注ycbg 线上管径标注xsgjbz 线外管径标注xwgjbz 多管管径标注dgjbz 管径、管长标注gjgcbz 设备名称标注sbbz灭火器标注mhqdim 器具标注qjbz孔洞.管件标注bkdgj标注工具bztol修改标注xgbz改小数位gxsw改CAD标注尺寸形式cdim 字符查找strlok数字增减numadd 文字旋转wzxz单行文字dhwz字库调用zk线上文字xsxz特殊符号tsfh设定字型style修改字型xzx修改字高xzg修改字宽xzk改字图层gztc字符替换zfth交换文本jhwb文本替换wzth分解文字fjwz加前后缀qhz文字屏蔽wzpb去字屏蔽qwzpb 调行间距adrow 调字间距adcol文字对齐wzdq选字成行xzch文字下划线wzyx管长定义xtgcdy 图块定义xttkdy 返回系统材料fhcl单页设备jhdysb 分页设备jhfysb WORD文档式说明wdsm 文本文档式说明wbsm图块式施工说明tksm自动绘图例表xzhtlb 列表式图例htlb图块式图例tktlb添加图例表空行htlbk图例表编辑tlbbj图纸目录绘制mlbh 自动出施工图sgt平面校对pmjd 管线间距检查pmjc专业图层管理zcgl通用图层管理laycz 线上文字断线(自动) zdwzdx 线上文字断线(交互) jhwzdx 竖管管线断线sgdx遮挡自动断线gdzddx 遮挡交互断线gdjhdx 图块自动断线tkzddx 图块交互断线tkjhdx 改线宽modwid 改颜色线型modclr 改线型比例xxbl查询编辑cx局部放样jbfy管线刷mdygd 管径管材检查gcgjjc 管线无缝打断dx消除检查标志xcjcbz 线上文字断线(自动) zdwzdx 线上文字断线(交互) jhwzdx 改消火栓gxhs消火栓阴影xhsyy 防水套管fstg楼层线lcbg断管符号dgfh剖断线pdx加保温线bwx综合图库管理…zhtk展开图器具zkttk导入导出设置userdz 距离测量jlcl分类编辑dele线转轴测xzzc图块放缩tkfs图块替换tkth选图成块xtck改横向纵向比例gtzhbl 实体过滤stgl改实体层gstc按层选实体cgl按块选实体kgl选择文本xwb计算器hycal开关工具条toolbar标高标注精度bgjd尺寸标注精度ccbzjd管径标注形式gjbzxs默认管径mrgj立管符号lgfh模数设置lgdx排水管坡psgpsz管材规格gcgg管件管理gjgl管道综合gdtc辅助图层fztc图框设置tkzhsz图纸目录mlsz材料设备表clsbb设计速查资料jzzl给排水规范大全GPSGFDQ专业管道计算gdjs单位换算dwhsGPS帮助GPSHELP鸿业给排水命令集HYGPSMLJ关于GPS gpsabout联系我们congps。
压力表型号含义

YBN
耐震精密压力
12
YA
氨压表
12
CYWN
抗震差压表
13
YY
乙炔压力表
13
YEN
耐震膜盒压力表
14
YQ
氢气压力表
14
YPN
耐震膜片压力表
15
YKY
矿用压力表
16
YGW
耐高温压力表
17
YZS-102
双针双管压力表
18
YD
定位压力表
耐(防)腐系列
数字系列
序号
型号
名称
序号
型号
名称
1
YBF
不锈钢压力表
YE
膜盒压力表
2
YSZC
压力传感器
2
YP
膜片压力表
3
1151
差压变送器
3
YE--B
不锈钢膜盒压力表
4
YSG
电感压力变送器
4
YP-F
不锈钢膜片压力表
5
YSZC
小巧型压力变送器
远传系列
压力控制电接点系列
序号
型号
名称
序号
型号
名称
1
YTZ
电阻远传压力表
1
PD-H-L1(L2)
压力继电器
2
YTT
差动远传压力表
2
YSJ
精密数字压力表
9
YTXCG
耐震磁感电接点压力表
3
YSB
防爆数字压力表
10
YTXCG
防爆感应电接点压力表表(大功率)
序号
型号
名称
12
YXXD
耐震光电信号电接点压力表
闪烁晶体性能测试方法及应用研究

闪烁晶体性能测试⽅法及应⽤研究闪烁晶体性能测试⽅法及应⽤研究闪烁晶体⾃问世以来,在⾼能物理、核物理、核医学成像、⽯油测井、地质勘探以及⼯业⽆损检查等领域取得⼴泛应⽤。
为了对⼤型核医学成像设备及核探测仪器中晶体的选⽤提供参考,本⽂研究闪烁晶体的发光衰减时间、光输出强度、能量分辨率和余辉等闪烁特性,并通过原理框图、实验仪器与操作、数据处理以及误差分析详细叙述闪烁晶体的性能测试技术。
基于测试技术测试了锗酸铋BGO、掺铊碘化铯CsI(Tl)、掺铯溴化镧LaBr3: Ce以及硅酸钇镥L YSO四种闪烁晶体的性能,并结合物理特性分析它们在各领域应⽤的优劣势;同时针对⽅形LYSO晶体样品,研究三种不同尺⼨晶体性能的差异。
最后,对性能测试实验中晶体的不同放置⽅式以及对晶体加热来缩短余辉时间展开研究。
关键词:闪烁晶体,测试技术,探测器,光电倍增管第⼀章引⾔本章是全⽂的引⾔部分,主要介绍论⽂的研究背景及意义,简要分析国内外关于闪烁晶体材料和晶体性能测试的研究现状,进⽽提出本论⽂的研究内容,并对论⽂结构安排进⾏说明。
1.1 研究背景及意义闪烁晶体材料因其丰富的特性、优良的性能成为材料科学领域内的⼀⼤研究热点。
相⽐于液体、塑料⾼分⼦以及荧光粉等闪烁材料,⽆机闪烁晶体具有体积⼩、密度⾼、物理特性和闪烁性能优良等显著特点,在核医学、核物理、⼯业CT 以及安全稽查领域取得了⼴泛的发展。
因为不同领域对闪烁晶体材料特性的需求各异,所以对闪烁晶体性能的测试⼯作⽆论在科学研究还是⼯业应⽤中都显得尤为重要。
⽬前,在⾼端核医学领域发展迅猛的正电⼦发射断层扫描技术(Positron Emission Tomography,PET)进⼀步推动了⽆机闪烁晶体的发展,从最初应⽤到PET中的碘化钠NaI(Tl)晶体,到锗酸铋Bi4Ge3O12(BGO)晶体,再到如今性能更加优良的硅酸钇镥Lu2(1-x)Y2xSiO5(LYSO)晶体,新型闪烁晶体在⾏业进步的推动下不断涌现。
塑料润滑剂及润滑作用的一些理论与应用之二:润滑剂与润湿现象

树脂的/m-r成型均须经过由固态粉末或颗粒经 过熔融变成流动的黏稠液体的过程。在这个过程 中,润滑剂熔点较低,首先熔化威液体,作为内润滑 荆进入尚未熔化的树脂微粒中,或者作为外润滑剂 包覆在树脂微粒表面。这些行为都涉及液态润滑剂 与固态树脂微粒之间液一固界面的物理化学问题; 当树脂熔融以后,润滑剂的润滑行为又涉及液态的 润滑剂与液态树脂之间液一液界面的物理化学问 题。对于内润滑剂,宏观上看好像溶解在液态树脂 相中,但各点不是均匀分布,并来形成真溶液。微观 上内润滑剂仍然与液态树脂相构成了界面。润滑剂 与树脂的混合体,类似于油溶性的牛乳以细小微珠 分散在水中形成的乳浊液。既然润滑剂在塑料加工 的全过程里与树脂相构成了界面,它们的界面性质 及构成规律就应该遵守界面物理化学的一般规律。 润滑剂与树脂之间能否形成界面的条件,也应与两 种一般液体的界面一样,取决于液体的表面张力或界 面张力的大小,取决于液体接触角或润湿角的大小。
22.50
20
22.39
20
43,35
20
486.50
25
485.50
30
484.50
熔点1 880.00 熔点1 880.00
熔点1 300.00
1 100
878。50
308
116 60
由表2数据可知,各类有机物中极性碳氢化合
物液体的表面张力大于非极性碳氢化合物;含芳环
或共轭双键的化合物比饱和碳氢化合物液体的表面
分子受周围分子作用力不均衡有关。由于在相界面
上的物质具有与体相不同的结构和性质,从而产生
的各种物理及化学现象称为界面现象。气一液和气
一固界面上发生的界面现象也称为表面现象。
总之,液体表面张力及表面自由能的产生,是分
大学物理教程习题答案上海交通大学出版社

习题11-1.已知质点位矢随时间变化的函数形式为(cos sin )r =R ωt i ωt j + 其中ω为常量.求:1质点的轨道;2速度和速率;解:1 由(cos sin )r =R ωt i ωt j +,知:cos x R t ω= ,sin y R t ω=消去t 可得轨道方程:222x y R +=∴质点的轨道为圆心在0,0处,半径为R 的圆; 2由d rv dt=,有速度:sin Rcos v R t i t j ωωωω=-+ 而v v =,有速率:1222[(sin )(cos )]v R t R t R ωωωωω=-+=;1-2.已知质点位矢随时间变化的函数形式为24(32)r t i t j =++,式中r 的单位为m ,t 的单位为s ;求:1质点的轨道;2从0=t 到1=t 秒的位移;30=t 和1=t 秒两时刻的速度;解:1由24(32)r t i t j =++,可知24x t = ,32y t =+消去t 得轨道方程为:x =2(3)y -,∴质点的轨道为抛物线; 2由d rv dt=,有速度:82v t i j =+ 从0=t 到1=t 秒的位移为:1100(82)42r v d t t i j d t i j ∆==+=+⎰⎰30=t 和1=t 秒两时刻的速度为:(0)2v j =,(1)82v i j =+ ; 1-3.已知质点位矢随时间变化的函数形式为22r t i t j =+,式中r 的单位为m ,t 的单位为s .求:1任一时刻的速度和加速度;2任一时刻的切向加速度和法向加速度; 解:1由d r v dt =,有:22v t i j =+,d va dt=,有:2a i =; 2而v v =,有速率:12222[(2)2]21v t t =+=+∴t dv a dt=221t t =+,利用222t n a a a =+有: 22221n t a a a t =-=+;1-4.一升降机以加速度a 上升,在上升过程中有一螺钉从天花板上松落,升降机的天花板与底板相距为d ,求螺钉从天花板落到底板上所需的时间;解法一:以地面为参照系,坐标如图,设同一时间内螺钉下落的距离为1y ,升降机上升的高度为2y ,运动方程分别为21012y v t gt =- 122012y v t at =+ 212y y d += 3注意到1y 为负值,有11y y =- 联立求解,有:2dt g a=+;解法二:以升降机为非惯性参照系,则重力加速度修正为'g g a =+,利用21'2d g t =,有:22'ddt g g a==+; 1-5.一质量为m 的小球在高度h 处以初速度0v 水平抛出,求:1小球的运动方程;2小球在落地之前的轨迹方程;3落地前瞬时小球的d r d t ,d v d t ,d vd t; 解:1如图,可建立平抛运动学方程:0x v t = ,212y h g t =- ,∴201()2r v t i h g t j =+-;2联立上面两式,消去t 得小球轨迹方程:2202gx y h v =-+为抛物线方程;3∵201()2r v t i h g t j =+-,∴0d r v i g t j d t =-, 即:0v v i g t j =-,d vg j d t=- 在落地瞬时,有:2ht g=,∴02d r v i gh j d t =- 又∵ v =2222()xyv v v gt +=+-,∴2122220022[()]g gh g t dvdt v gh v gt ==++ ; 1-6.路灯距地面的高度为1h ,一身高为2h 的人在路灯下以匀速1v 沿直线行走;试证明人影的顶端作匀速运动,并求其速度2v .证明:设人向路灯行走,t 时刻人影中头的坐标为1x ,足的坐标为2, 由相似三角形关系可得:12211x x h x h -=, ∴11212h x x h h =- 两边对时间求导有:11212d x h d x d t h h d t =- ,考虑到:21d x v d t=, 知人影中头的速度:21112d x hv v d t h h ==-影常数;1-7.一质点沿直线运动,其运动方程为2242t t x -+=m,在 t 从0秒到3秒的时间间隔内,则质点走过的路程为多少解:由于是求质点通过的路程,所以可考虑在0~3s 的时间间隔内,质点速度为0的位置:t dtdxv 44-==若0=v 解得 s t 1=, m x x x 1021=∆+∆=∆;1-8.一弹性球直落在一斜面上,下落高度cm 20=h ,斜面对水平的倾角 30=θ,问它第二次碰到斜面的xy 0v h O O1x 2x 1h 2h位置距原来的下落点多远假设小球碰斜面前后速度数值相等,碰撞时人射角等于反射角;解:小球落地时速度为gh v 20=,建立沿斜面的直角坐标系,以小球第一次落地点为坐标原点如图示,00060cos v v x =→ 200060cos 2160cos t g t v x += 1 00060sin v v y =→ 200060sin 2160sin t g t v y -= 2第二次落地时:0=y ,代入2式得:g vt 02=,所以:2002002122cos 60cos 604802v gh x v t g t h cm g g ⋅=+====; 1-9.地球的自转角速度最大增加到若干倍时,赤道上的物体仍能保持在地球上而不致离开地球已知现在赤道上物体的向心加速度约为2s /cm 4.3,设赤道上重力加速度为2m/s 80.9;解:由向心力公式:2F m R ω=向,赤道上的物体仍能保持在地球必须满足:F mg =向,而现在赤道上物体的向心力为:'F ma =向∴016.9817ωω====≈ 1-10.已知子弹的轨迹为抛物线,初速为0v ,并且0v 与水平面的夹角为θ;试分别求出抛物线顶点及落地点的曲率半径;解:1抛物线顶点处子弹的速度0cos x v v θ=,顶点处切向加速度为0,法向加速度为g ;因此有:22011(cos )v vg θρρ==, 2201cos v gθρ=; 2在落地点时子弹的0v ,由抛物线对称性,知法向加速度方向与竖直方向成θ角,则:cos n a g θ=,有:202cos v g θρ= 则: 22cos v g ρθ=;1-11.一飞行火箭的运动学方程为1()ln(1)=+--x ut u t bt b,其中b 是与燃料燃烧速率有关的量,u 为燃气相对火箭的喷射速度;求: 1火箭飞行速度与时间的关系;2火箭的加速度;解:一维运动,直接利用公式:dx v dt =,dva dt=有: 1)1ln(bt u dt dx v --== , 2btub dt dv a -==1 1-12.飞机以s /m 1000=v 的速度沿水平直线飞行,在离地面高m 98=h 时,驾驶员要y把物品投到前方某一地面目标上,问:投放物品时,驾驶员看目标的视线和竖直线应成什么角度此时目标距飞机下方地点多远 解:设此时飞机距目标水平距离为x 有:t v x 0=┄①,221gt h =┄② 联立方程解得:m x 447≈,∴05.77arctan ≈=hx θ;1-13.一物体和探测气球从同一高度竖直向上运动,物体初速为s /m 0.490=v ,而气球以速度s /m 6.19=v 匀速上升,问气球中的观察者在第二秒末、第三秒末、第四秒末测得物体的速度各多少解:物体在任意时刻的速度表达式为:gt v v y -=0故气球中的观察者测得物体的速度v v v y -=∆代入时间t 可以得到第二秒末物体速度:29.8m v s ∆=,向上 第三秒末物体速度:30v ∆=第四秒末物体速度:49.8m v s ∆=-向下;思考题11-1.质点作曲线运动,其瞬时速度为v ,瞬时速率为v ,平均速度为v ,平均速率为v ,则它们之间的下列四种关系中哪一种是正确的A v v ==v v ,;B v v =≠v v ,;C v v ≠=v v ,;D v v ≠≠v v ,答:C1-2.沿直线运动的物体,其速度大小与时间成反比,则其加速度的大小与速度大小的关系是:A 与速度大小成正比;B 与速度大小平方成正比;C 与速度大小成反比;D 与速度大小平方成反比; 答:B1-3.如图所示为A,B 两个质点在同一直线上运动的-v t 图像,由图可知 A 两个质点一定从同一位置出发 B 两个质点都始终作匀加速运动 C 在2s t 末两个质点相遇D 在20s t 时间内质点B 可能领先质点A 答:D 1-4.质点的t x ~关系如图,图中a ,b ,c 三条线表示三个速度不同的运动.问它们属于什么类型的运动哪一个速度大哪一个速度小答:匀速直线运动;a b c v v v >>; 1-5.如图所示,两船A 和B 相距R ,分别以速度A v 和B v 匀速直线行驶,它们会不会相碰若不相碰,求两船相靠最近的距离.图中α和β为已知;答:方法一:如图,以A 船为参考系,在该参考系中船A 是静止的,而船B 的速度A v v v B -=';v '是船B 相对于船A 的速度,从船B 作一条平行于v '方向的直线BC,它不与船A 相交,这表明两船不会相碰.由A 作BC 垂线AC,其长度min r 就是两船相靠最近的距离 θsin min R r =作FDv v v A B '-=αβθsin sin sin )cos(222βα+++='B A B A v v v v v R v v v v v v r B A B A A B )cos(2sin sin 22min βααβ+++-=t 0)(=dt t dr Rv v v v v v r B A BA AB )cos(2sin sin 22min βααβ+++-=0d r d t =0d r d t ≠0d v d t =0d v d t ≠0d a d t =0d ad t==+x y v v i v j 0d d =⎰⎰ttxv t v t 0d d =⎰⎰ttyv t v td d =⎰⎰ttx v t v td d =⎰⎰tty v t v t 1t 111d ,d ,d t t t xyv t v t v t⎰⎰⎰A B⎰⎰⎰BABABAr d ,d ,d r r tv t xd 1⎰tvt yd 10⎰1d t v t⎰1t ⎰B Ar d d B A⎰r ⎰BAdr 16kg xOy6N x f =7N y f =0t =0x y ==2m /s x v =-0y v =2s t =x x f a m =x a 263m /168s ==27m /16y y f a s m -==2003522m /84x x x v v a dt s =+=-+⨯=-⎰200772m /168y y y v v a dt s -=+=⨯=-⎰2s 57m /s 48v i j =--22011()22x y r v t a t i a t j=++1317(224)()428216i j -=-⨯+⨯⨯+⨯2kg 2424=-F i t j 034=+v i jn F d v F m d t =24242d v i t j dt -=⋅0201(424)2v t v d v i t j dt =-⎰⎰3024v v t i t j =+-034v i j =+s t 1=15v i =t v v e =15v i =s t 1=s t 1=ij 2424F i t j =-s t 1=424424t n F i j e e =-=-24n F N=-45A a g=1m 2m μFmax 212222f mg f Fa m m m m m μ==<=+12()F m m g μ<+maxF max 12()F m m g μ=+12()F m m g μ<+θ)(θμtg <a θμμθtan 1tan 1+-=a g θμμθtan 1tan 2-+=a gtan tan 1tan 1tan g a g θμθμμθμθ-+≤≤+-'x 'y 'x sin cos 0mg ma f θθ-±='y cos sin 0N mg ma θθ--=f N μ=sin cos (cos sin )0mg ma mg ma θθμθθ-±+=sin cos tan cos sin 1tan a g g θμθθμθμθμθ±±==a tan tan 1tan 1tan g a g θμθμμθμθ-+≤≤+-m 0v k f kv =-dv f mdt=•m AR B dv kv m dt -=dv k dt v m =-000t v dv k dt v m =-⎰⎰t m ke v v -=00v =dv dv dx dt dx dt =dx v dt =mdx dvk=-00max 0v m mx dv v k k=-=⎰2m 1m θ2m 1m 2'a 1m 1a 2m 2m g 1N 21m a 1m 1m g 1N 2N 2m 21222cos sin 'm a m g m a θθ+=1212sin cos N m a m g θθ+=1m 111sin N m a θ=11212sin cos sin m a m a m g θθθ+=21212sin cos sin m a g m m θθθ=+122212()sin 'sin m m a g m m θθ+=+2'a 122212sin cos 'sin x x m a a a g m m θθθ=-=-+111sin m a N θ==g m m m m θθ22121sin cos +R μ0=t 0v 2v N m R =f Nμ=dtdvmf =-2dv v dt Rμ=-0201vt v dv dt v R μ-=⎰⎰t μv R R v v 00+=20R m =0.6F i =F R -R2020B A r r r i j∆=-=-+A F r =⋅∆0.6(2020)12A i i j =⋅-+=-0.5kg A F r=⋅∆250.5r t i j =+24(4)(2)60r r r i →∆=-=220.5105d rF m i i d t==⋅=560300A i i J =⋅=m2()F at i bt j =+t P F v =⋅P F v =⋅2232325111111()()()2323ati bt j at i bt j a t b t m m =+⋅+=+2(52.838.4)F x x i =--F x N m m 522.01=x m 34.12=x ()()F x F x i =f A 2v N G mR-=R G N mv )(21212-=2102f mgR A mv +=-11()(3)22f A N G R mgR N mg R =--=-1ρl 2ρAB B1212ρρρ<<max v H G F =浮hsg lsg 12ρρ=l h 12ρρ=212mgh mv A =+浮22max21012h slv sglh gsydy ρρρ=-⎰2max 1v gl ρρ=H 'H l h =+2110'l lsgH ysgdy lsgh ρρρ=+⎰2110()l lsgH ysgdy lsg H l ρρρ=+-⎰1122()lH ρρρ=-L m A A B A m B m k l B 0x A B A A B A B A22011()22A B m m v k x +=0x m m k v B A +=x l =A 221122A A m v kx =0AA A Bm x x m m =+m3e Gm m F r r =-e e ,R m e e 211e e P R R eE F dr Gm m dr Gm m r R ∞∞=⋅=-⋅=-⎰⎰I T I τ12v v =I mv =∆0I =cos T mgθ=2mgπωm Oxy cos sin r a t i b t j ωω=+0=t ωπ/2=t P mv =d r v dt ==2m 1m θθ1N2m 2m g21m a 1m θ1m g 2N 1N θy xOB AFθωl mg Tsin cosa t ib t jωωωω-+()(sin cos )P t m a t i b t jωωω=--2()(0)0I mv P P m b j m b j πωωω=∆=-=-= 2.0kg1.0m20g 0v 600m v 30m 01mv mv M v =+01 5.7mv mv v M-==/m s21v T Mg M l -=2184.6v T Mg M Nl=+=00.0257011.4I mv mv N s =-=-⨯=-⋅m /skg 102.122⋅⨯-236.410kg m/s -⨯⋅kg 108.526-⨯2222221.20.6410P P P -=+=+⨯核电子中微子0.64tan 1.2P P α==中微子电子028.1α=221.410/P kgm s -=⨯核9.151=-=απθ2180.17102k P E J m -==⨯核核m 2c x c x 112212c m x m x x m m +=+12m m m ==12c x x =2223,42c c c mx mx x x x m +== 30=α 1.0M kg =30x cm =0.01m kg=200/v m s =25/k N m =22111sin 22Mv kx Mgx α+=10.83/v m s ⇒=1cos Mv mv m M v α'-=+()0.89/v m s '⇒=-θM L 0cos M r F mg v t kθ=⨯=-200cos 2t mg v L r mv M dt t k θ=⨯==-⎰1v 2v 1122r mv r mv =122v v =0P MmE G r=-R Mm G mv R Mm G mv 421221022021-=-mg R Mm G =20321Rg v =62Rg v =ρρ220v m Mm G =R 38=ρ22v Rg =0E =24sin A mv R mv R θ=⋅22v Rg =030θ⇒=m r m 2m 2/2mr m2m ma T mg 222=-ma mg T =-12()T T r J β-=βJ r T T =-)(1βr a =2/2J mr =ga 41=mg T 811=l m μ0ωO l m =λdm d x λ=d f dmg gd x μμλ==d M g xd xμλ=20124lM g xd x mgl μλμ==⎰d M J J dt ωβ==000t Mdt Jd ωω-=⎰⎰2011412mglt m l μω-=-03l t g ωμ=0M t J J ωω-=-0ω=2112J ml =03l t g ωμ=2m kg 01.0⋅cm 7kg 5N/m 200=k x maxx 2max max 12k x mg x =max 20.49mg x m k ==222111222k x mv J mg x ω++=v Rω=2222111222k x m R J mg x ωω++=x0d d x ω=21()22d k x m R J mg d x ωω++⋅=0d d x ω=αP 中微子P 电子P 核cx /2c x xyO x y 0v vOz•θT)(245.0m k mg x ==0.245x =22max 2121()2mgx kx v J m r -=+max 1.31v =m 2l 31l 32m 0v m 021v 22004221()9933l l v l v l ω+=+032v l ω=mg N =αsin 212cos N N α=α1N 1F kx m gμ=+2kx m g μ=11A m a kx m g μ=+121A m m a g m μ+=22B m a kx m g μ=-0B a =F GF G F 2321μ+≤1322F F μ<33μ>Rv m mg N 2sin +=θA B F s F A F r =⋅∆F s k m m mg k x =k mg x =212mg x k x =kmgx 2=αx v x 120αI 21I m v m v =-21v v =αm Δ1v 2v m Δm Δf 'f 'm 1e 212e 222121r m Gm mv r m Gm mv -=-1122sin sin θθmv mv =2e 2rm Gm r mv =当两小孩质量相等时,M =0;则系统角动量守恒,两人的实际的速度相同,将同时到达滑轮处,与谁在用力,谁不在用力无关;选择C; 2-13.一圆盘绕过盘心且与盘面垂直的轴O 以角速度ω按图示方向转动,若如图所示的情况那样,将两个大小相等方向相反但不在同一条直线的力F 沿盘面方向同时作用到盘上,则盘的角速度ω怎样变化 答:增大2-14.一个人站在有光滑固定转轴的转动平台上,双臂伸直水平地举起二哑铃,在该人把此二哑铃水平收缩到胸前的过程中,人、哑铃与转动平台组成的系统的: A 机械能守恒,角动量守恒;B 机械能守恒,角动量不守恒; C 机械能不守恒,角动量守恒;D 机械能不守恒,角动量不守恒; 答:C习题33-1.原长为m 5.0的弹簧,上端固定,下端挂一质量为kg 1.0的物体,当物体静止时,弹簧长为m 6.0.现将物体上推,使弹簧缩回到原长,然后放手,以放手时开始计时,取竖直向下为正向,写出振动式;g 取解:振动方程:cos()x A t ωϕ=+,在本题中,kx mg =,所以9.8k =; ∴ 9.8980.1k m ω===; 取竖直向下为x 正向,弹簧伸长为时为物体的平衡位置,所以如果使弹簧的初状态为原长,那么:A =,mg 1N 2N α1mv 2mv I风风'f //'f 'f ⊥当t =0时,x =-A ,那么就可以知道物体的初相位为π;所以:0.1cos x π=+)即:)x =-;3-2.有一单摆,摆长m 0.1=l ,小球质量g 10=m ,0=t 时,小球正好经过rad 06.0-=θ处,并以角速度0.2rad/s θ=向平衡位置运动;设小球的运动可看作简谐振动,试求:1角频率、频率、周期;2用余弦函数形式写出小球的振动式;g 取解:振动方程:cos()x A t ωϕ=+ 我们只要按照题意找到对应的各项就行了;1角频率: 3.13/rad s ω===,频率:0.5Hz ν=== ,周期:22T s ===;2振动方程可表示为:cos3.13A t θϕ=+(),∴ 3.13sin 3.13A t θϕ=-+() 根据初始条件,0t =时:cos Aθϕ=,0(12sin 0(34 3.13A θϕ>=-<,象限),象限)可解得:2008.810227133 2.32A m ϕ-=⨯==-=-,,所以得到振动方程:28.810cos3.13 2.32t m θ-=⨯-() ; 3-3.一质点沿x 轴作简谐振动,振幅为cm 12,周期为s 2;当0=t 时,位移为cm 6,且向x 轴正方向运动;求:1振动表达式;2s 5.0=t 时,质点的位置、速度和加速度;3如果在某时刻质点位于cm 6-=x ,且向x 轴负方向运动,求从该位置回到平衡位置所需要的时间;解:1由题已知 A =,T =2 s ,∴ 2Tπωπ==又∵t =0时,06x cm =,00v >,由旋转矢量图,可知:3πϕ=-故振动方程为:0.12cos3x t m ππ=-(); 2将t = s 代入得:0.12cos 0.12cos 0.10436x t m πππ=-==(),0.12sin 0.12cos 0.188/36v t m s ππππ=--==-(),2220.12cos 0.12cos 1.03/36a t m s πππππ=--=-=-(),方向指向坐标原点,即沿x 轴负向;3由题知,某时刻质点位于6cm 2Ax =-=-, 且向x 轴负方向运动,如图示,质点从P 位置回到平衡位置Q 处需要走32ππϕ∆=+,建立比例式:2tTϕπ∆∆=,有:56t s ∆= ;3-4.两质点作同方向、同频率的简谐振动,振幅相等;当质点1在 2/1A x =处,且x向左运动时,另一个质点2在 2/2A x -= 处,且向右运动;求这两个质点的位相差; 解:由旋转矢量图可知:当质点1在 2/1A x =处,且向左运动时,相位为3π,而质点2在 2/2A x -= 处,且向右运动,相位为43π;所以它们的相位差为π;3-5.当简谐振动的位移为振幅的一半时,其动能和势能各占总能量的多少物体在什么位置时其动能和势能各占总能量的一半解:由212P E k x =,212k E mv =,有:221cos ()2P E k A t ωϕ=+,2222211sin ()sin ()22k E m A t k A t ωωϕωϕ=+=+, 1当2Ax =时,由cos()x A t ωϕ=+,有:1cos()2t ωϕ+=,3sin()t ωϕ+=,∴14P E E =,34k E E =; 2当12P k E E E ==时,有:22cos ()sin ()t t ωϕωϕ+=+ ∴cos()2t ωϕ+=20.7072x A A ==±; 3-6.两个同方向的简谐振动曲线如图所示1求合振动的振幅;2求合振动的振动表达式; 解:通过旋转矢量图做最为简单; 由图可知,两个振动同频率,且1A 初相:12πϕ=,2A 初相:22πϕ=-,表明两者处于反相状态,反相21(21)k ϕϕϕπ∆=-=±+,012k =,,,∵12A A <,∴合成振动的振幅:21A A A =- ;合成振动的相位:22πϕϕ==- ;合成振动的方程:)()(22cos 12ππ--=t T A A x ;3-7.两个同方向,同频率的简谐振动,其合振动的振幅为cm 20,与第一个振动的位相差为6π;若第一个振动的振幅为cm 310;则1第二个振动的振幅为多少2两简谐振动的位相差为多少解:如图,可利用余弦定理:由图知 ︒-+=30cos 2122122A A A A A = m ∴A 2=0.1 m ,再利用正弦定理:02sin sin 30AA θ=,有: 2sin 12A A θ==,∴2πθ=;说明A 1与A 2间夹角为π/2,即两振动的位相差为π/2 ; 3-8. 质点分别参与下列三组互相垂直的谐振动:1 4cos 864cos 86x t y t ππππ⎧⎛⎫=+ ⎪⎪⎪⎝⎭⎨⎛⎫⎪=- ⎪⎪⎝⎭⎩ ;2 4cos 8654cos 86x t y t ππππ⎧⎛⎫=+ ⎪⎪⎪⎝⎭⎨⎛⎫⎪=- ⎪⎪⎝⎭⎩;3 4cos 8624cos 83x t y t ππππ⎧⎛⎫=+ ⎪⎪⎪⎝⎭⎨⎛⎫⎪=+ ⎪⎪⎝⎭⎩;试判别质点运动的轨迹;解:质点参与的运动是频率相同,振幅相同的垂直运动的叠加;对于cos()x x A t ωϕ=+,4cos()y y t ωϕ=+的叠加,可推得:1将6x πϕ=,6y πϕ=-代入有:2222cos 16sin 33x y x y ππ+-=,则方程化为:2212x y x y +-=,轨迹为一般的椭圆;2将6x πϕ=,56y πϕ=-代入有:2222cos 16sin x y x y ππ+-=则方程化为:2220x y x y +-=,即0x y +=,轨迹为一直线;3将6x πϕ=,23y πϕ=代入有:2222cos 16sin 22x y x y ππ+-=则方程化为:2224x y +=,轨迹为圆心在原点,半径为4m 的圆;3-9.沿一平面简谐波的波线上,有相距2.0m 的两质点A 与B ,B 点振动相位比A 点落后6π,已知振动周期为2.0s ,求波长和波速;解:根据题意,对于A 、B 两点,m x 2612=∆=-=∆,πϕϕϕ,而相位和波长之间满足关系:πλπλϕϕϕ221212xx x ∆-=--=-=∆,代入数据,可得:波长λ=24m;又∵T =2s ,所以波速12/u m s Tλ==;3-10.已知一平面波沿x 轴正向传播,距坐标原点O 为1x 处P 点的振动式为)cos(ϕω+=t A y ,波速为u ,求:1平面波的波动式;2若波沿x 轴负向传播,波动式又如何 解:1设平面波的波动式为0cos[]xy A t uωϕ=-+(),则P 点的振动式为:10cos[]P x y A t uωϕ=-+(),与题设P 点的振动式cos()P y A t ωϕ=+比较, 有:10xuωϕϕ=+,∴平面波的波动式为:1cos[()]x x y A t u ωϕ-=-+;2若波沿x 轴负向传播,同理,设平面波的波动式为:0cos[]xy A t u ωϕ=++(),则P 点的振动式为:10cos[]P x y A t uωϕ=++(),与题设P 点的振动式cos()P y A t ωϕ=+比较, 有:10xuωϕϕ=-+,∴平面波的波动式为:1cos[()]x x y A t u ωϕ-=++;3-11.一平面简谐波在空间传播,如图所示,已知A 点的振动规律为cos(2)y A t πνϕ=+,试写出: 1该平面简谐波的表达式;2B 点的振动表达式B 点位于A 点右方d 处; 解:1仿照上题的思路,根据题意,设以O 点为原点平面简谐波的表达式为:0cos[2]xy A t u πνϕ=++(),则A 点的振动式:0cos[2]A ly A t uπνϕ-=++()题设A 点的振动式cos(2)y A t πνϕ=+比较,有:02lu πνϕϕ=+, ∴该平面简谐波的表达式为:]2cos[ϕπν+++=)(uxu l t A y2B 点的振动表达式可直接将坐标x d l =-,代入波动方程:3-12.已知一沿x 正方向传播的平面余弦波,s 31=t 时的波形如图所示,且周期T 为s 2;1写出O 点的振动表达式;2写出该波的波动表达式; 3写出A 点的振动表达式; 4写出A 点离O 点的距离;解:由图可知:0.1A m =,0.4m λ=,而2T s =,则:/0.2/u T m s λ==,2T πωπ==,25k ππλ==,∴波动方程为:00.1cos(5)y t x ππϕ=-+O 点的振动方程可写成:00.1cos()O y t πϕ=+由图形可知:s 31=t 时:0.05O y =,有:00.050.1cos()3πϕ=+考虑到此时0O d y d t <,∴03πϕ=,53π舍去 那么:1O 点的振动表达式:0.1cos()3O y t ππ=+;2波动方程为:0.1cos(5)3y t x πππ=-+;3设A 点的振动表达式为:0.1cos()A A y t πϕ=+由图形可知:s 31=t 时:0A y =,有:cos()03A πϕ+=考虑到此时0A d y d t >,∴56A πϕ=-或76A πϕ=∴A 点的振动表达式:50.1cos()6A y t ππ=-,或70.1cos()6A y t ππ=+;4将A 点的坐标代入波动方程,可得到A 的振动方程为:0.1cos(5)3A A y t x πππ=-+,与3求得的A 点的振动表达式比较,有:5563A t t x πππππ-=-+,所以:m x A 233.0307== ; 3-13.一平面简谐波以速度m/s 8.0=u 沿x 轴负方向传播;已知原点的振动曲线如图所示;试写出:1原点的振动表达式; 2波动表达式;3同一时刻相距m 1的两点之间的位相差; 解:这是一个振动 图像由图可知A =0.5cm ,设原点处的振动方程为:30510cos()O y t ωϕ-=⨯+;1当0t =时,30 2.510O t y -==⨯,考虑到:00O t d y d t=>,有:03πϕ=-,当1t =时,10O t y ==,考虑到:10O t d y d t =<,有:32ππω-=,56πω=,∴原点的振动表达式:35510cos()63O y t ππ-=⨯-;2沿x 轴负方向传播,设波动表达式:35510cos()63y t k x ππ-=⨯+-而512460.825k u ωππ==⨯=,∴3524510cos()6253y t x πππ-=⨯+-; 3位相差:252 3.2724x k x rad ϕππλ∆∆==∆== ; 3-14.一正弦形式空气波沿直径为cm 14的圆柱形管行进,波的平均强度为39.010-⨯/()J s m ⋅,频率为Hz 300,波速为m/s 300;问波中的平均能量密度和最大能量密度各是多少每两个相邻同相面间的波段中含有多少能量解:1已知波的平均强度为:39.010I -=⨯/()J s m ⋅,由I w u =⋅ 有:53max 2610/w w J m -==⨯;2由W w V =⋅,∴221144uW w d w d πλπν=⋅=5327310/(0.14)1 4.62104J m m m J π--=⨯⨯⋅⋅=⨯ ;3-15.一弹性波在媒质中传播的速度310/u m s =,振幅41.010A m -=⨯,频率310Hz ν=;若该媒质的密度为3800/kg m ,求:1该波的平均能流密度;21分钟内垂直通过面积24m 100.4-⨯=S 的总能量; 解:1由:2212I u A ρω=,有:34232110800102102I π-=⨯⨯⨯⨯()()521.5810/W m =⨯; 21分钟为60秒,通过面积24m 100.4-⨯=S 的总能量为:W I S t =5431.581041060 3.7910J -=⨯⨯⨯⨯=⨯ ;3-16.设1S 与2S 为两个相干波源,相距41波长,1S 比2S 的位相超前2π;若两波在在1S 、2S 连线方向上的强度相同且不随距离变化,问1S 、2S 连线上在1S 外侧各点的合成波的强度如何又在2S 外侧各点的强度如何解:1如图,1S 、2S 连线上在1S 外侧,∵212122()24r r πππλϕϕϕπλλ∆=---=--⋅=-, ∴两波反相,合成波强度为0; 2如图,1S 、2S 连线上在2S 外侧,∵212122('')()024r r πππλϕϕϕλλ∆=---=---=, ∴两波同相,合成波的振幅为2A ,合成波的强度为:220(2)44I A A I === ;3-17.图中所示为声音干涉仪,用以演示声波的干涉;S 为声源,D 为声音探测器,如耳或话筒;路径SB D 的长度可以变化,但路径SAD 是固定的;干涉仪内有空气,且知声音强度在B 的第一位置时为极小值100单位,而渐增至B 距第一位置为cm65.1的第二位置时,有极大值900单位;求:1声源发出的声波频率;2抵达探测器的两波的振幅之比;解:根据驻波的定义,相邻两波节腹间距:2x λ∆=,相邻波节与波腹的间距:4x λ∆=,可得:4 6.6x cm λ=∆=;1声音的速度在空气中约为340m/s ,所以:234051516.610u Hz νλ-===⨯()。
TeSys GV2设备说明书

T h e i n f o r m a t i o n p r o v i d e d i n t h i s d o c u m e n t a t i o n c o n t a i n s g e n e r a l d e s c r i p t i o n s a n d /o r t e c h n i c a l c h a r a c t e r i s t i c s o f t h e p e r f o r m a n c e o f t h e p r o d u c t s c o n t a i n e d h e r e i n .T h i s d o c u m e n t a t i o n i s n o t i n t e n d e d a s a s u b s t i t u t e f o r a n d i s n o t t o b e u s e d f o r d e t e r m i n i n g s u i t a b i l i t y o r r e l i a b i l i t y o f t h e s e p r o d u c t s f o r s p e c i f i c u s e r a p p l i c a t i o n s .I t i s t h e d u t y o f a n y s u c h u s e r o r i n t e g r a t o r t o p e r f o r m t h e a p p r o p r i a t e a n d c o m p l e t e r i s k a n a l y s i s , e v a l u a t i o n a n d t e s t i n g o f t h e p r o d u c t s w i t h r e s p e c t t o t h e r e l e v a n t s p e c i f i c a p p l i c a t i o n o r u s e t h e r e o f .N e i t h e r S c h n e i d e r E l e c t r i c I n d u s t r i e s S A S n o r a n y o f i t s a f f i l i a t e s o r s u b s i d i a r i e s s h a l l b e r e s p o n s i b l e o r l i a b l e f o r m i s u s e o f t h e i n f o r m a t i o n c o n t a i n e d h e r e i n .Product data sheetCharacteristicsGV2ME07TeSys GV2 Manual Starter and Protector,thermal magnetic circuit protector, pushbuttons, 1.6 to 2.5 A, screw clampProduct availability: Stock - Normally stocked in distribution facilityMainRange TeSys Product name TeSys GV2Device short name GV2ME Device application MotorTrip unit technologyThermal-magneticComplementaryPoles description 3P Network type ACUtilisation category AC-3 IEC 60947-4-1Category A IEC 60947-2Network frequency 50/60 Hz IEC 60947-4-1Fixing mode 35 mm symmetrical DIN rail clipped Panel screwed with adaptor plate)Operating position Any positionMotor power kW0.75 KW 400/415 V AC 50/60 Hz 1.1 KW 500 V AC 50/60 Hz 1.5 kW 690 V AC 50/60 HzBreaking capacity100 KA Icu 230/240 V AC 50/60 Hz IEC 60947-2100 KA Icu 400/415 V AC 50/60 Hz IEC 60947-2100 KA Icu 440 V AC 50/60 Hz IEC 60947-2100 KA Icu 500 V AC 50/60 Hz IEC 60947-23 kA Icu 690 V AC 50/60 Hz IEC 60947-2[Ics] rated service short-circuit breaking capacity100 % 500 V AC 50/60 Hz IEC 60947-2100 % 230/240 V AC 50/60 Hz IEC 60947-2100 % 440 V AC 50/60 Hz IEC 60947-2100 % 400/415 V AC 50/60 Hz IEC 60947-275 % 690 V AC 50/60 Hz IEC 60947-2Control type Push-button Line Rated Current2.5 A Thermal protection adjustment range 1.6…2.5 A Magnetic tripping current 33.5 A[Ue] rated operational voltage 690 V AC 50/60 Hz IEC 60947-2[Ui] rated insulation voltage690 V AC 50/60 Hz IEC 60947-2[Ith] conventional free air thermal current 2.5 A IEC 60947-4-1[Uimp] rated impulse withstand voltage 6 kV IEC 60947-2Power dissipation per pole 2.5 W Mechanical durability 100000 cyclesElectrical durability 100000 cycles AC-3 440 V Maximum operating rate 25 cyc/hRated dutyContinuous IEC 60947-4-1Connections - terminals Screw clamp terminals 2 0.00…0.01 in² (1…6 mm²) solidScrew clamp terminals 2 0.00…0.01 in² (1.5…6 mm²) flexible without cable endScrew clamp terminals 2 0.00…0.01 in² (1…4 mm²) flexible with cable end Tightening torque15.05 lbf.in (1.7 N.m) screw clamp terminalsSuitability for isolation Yes IEC 60947-1Phase failure sensitivity Yes IEC 60947-4-1Height 3.50 in (89 mm)Width 1.77 in (45 mm)Depth 3.09 in (78.5 mm)Net weight0.57 lb(US) (0.26 kg)EnvironmentStandards EN/IEC 60947-2EN/IEC 60947-4-1CSA C22.2 No 60947-4-1UL 60947-4-1Product certifications IECEE CB SchemeULCSACCCEACATEXBVLROS (Lloyds register of shipping)DNV-GLRINAProtective treatment THIP degree of protection IP20 IEC 60529IK degree of protection IK04Ambient air temperature for operation-4…140 °F (-20…60 °C)Ambient air temperature for storage-40…176 °F (-40…80 °C)Fire resistance1760 °F (960 °C) IEC 60695-2-1Operating altitude6561.68 ft (2000 m)Ordering and shipping detailsCategory22367 - MANUAL STR PROTECTOR - GV2Discount Schedule I11GTIN00785901211945Package weight(Lbs)0.26 kg (0.57 lb(US))Returnability YesCountry of origin THOffer SustainabilitySustainable offer status Green Premium productREACh Regulation REACh DeclarationEU RoHS Directive Compliant EU RoHS DeclarationMercury free YesRoHS exemption information YesChina RoHS Regulation China RoHS DeclarationEnvironmental Disclosure Product Environmental ProfileCircularity Profile No need of specific recycling operationsWEEE The product must be disposed on European Union markets following specificwaste collection and never end up in rubbish bins.Contractual warrantyWarranty18 monthsProduct data sheetPerformance CurvesGV2ME07Thermal-Magnetic Tripping Curves for GV2ME and GV2PAverage Operating Times at 20 °C Related to Multiples of the Setting Current1 3 poles from cold state2 2 poles from cold state3 3 poles from hot stateCurrent Limitation on Short-Circuit for GV2ME and GV2P (3-Phase 400/415 V))Dynamic StressI peak = f (prospective Isc) at 1.05 Ue = 435 V1Maximum peak current224-32 A320-25 A417-23 A513-18 A69-14 A76-10 A84-6.3 A9 2.5-4 A10 1.6-2.5 A111-1.6 A12Limit of rated ultimate breaking capacity on short-circuit of GV2ME (14, 18, 23, and 25 A ratings).Thermal Limit on Short-Circuit for GV2METhermal Limit in kA2s in the Magnetic Operating ZoneSum of I2dt = f (prospective Isc) at 1.05 Ue = 435 V124-32 A 220-25 A 317-23 A 413-18 A 59-14 A 66-10 A 74-6.3 A8 2.5-4 A9 1.6-2.5 A 101-1.6 AProduct data sheetDimensions DrawingsGV2ME07DimensionGV2ME(1)MaximumMountingGV2ME On 35 mm railc = 78.5 on AM1 DP200 (35 x 7.5)c = 86 on AM1 DE200, ED200 (35 x 15)On panel with adapter plate GV2AF02On pre-slotted plate AM1 PAOn rails DZ5 MB201GV2AF01Combination GV2ME + TeSys k contactorGV2AF3Combination GV2ME + TeSys d contactorGV2AF4 + LAD311Combination GV2ME + TeSys d contactorGV2ME + GV1L3 (Current Limiter)X1 = 10 mm for Ue = 230 V or 30 mm for 230 V < Ue ≤ 690 VProduct data sheetGV2ME07 Connections and SchemaGV2ME•• and GV2RTConnection of Undervoltage Trip for Dangerous Machines (Conforming to INRS) on GV2ME Only。
DR无损检测工艺规程0版
山东扬石工程检验检测有限公司DR检测工艺规程(0版)编号:YSGC-DR-01-2019山东扬石工程检验检测有限公司名称签字日期名称签字日期编制校对审核批准目录1.0 适用范围...................................................................... - 1 -2.0 编制依据...................................................................... - 1 -3.0 人员资格...................................................................... - 1 -4.0 DR检测仪器.................................................................... - 2 -5.0 系统分辨率和材料.............................................................. - 3 -6.0 检测标识...................................................................... - 4 -7.0表面状态....................................................................... - 4 -8.0 透照方式...................................................................... - 4 -9.0 透照几何条件.................................................................. - 6 -10.0 线型像质计的放置和识别....................................................... - 8 -11.0曝光参数...................................................................... - 9 -12.0 图像分辨率的测定........................................................... - 10 -13.0现场检测..................................................................... - 10 -14.0辐射防护..................................................................... - 11 -15.0几何尺寸标定................................................................. - 11 -16.0 图像质量及评定.............................................................. - 11 -17.0质量分级..................................................................... - 12 -18.0 数据存储.................................................................... - 12 -19.0 检测记录及报告.............................................................. - 12 -1.0 适用范围本工艺规程适用于**项目管道焊缝无损检测工程中壁厚为2mm~50mm碳素钢、低合金钢等金属材料的管道环向对接接头X射线静态成像检测,不适用于采用γ射线源的射线数字成像检测。
Posital_Fraba_AbsoluteEncoders_SSI_AppNote
IMPLEMENTATIONOFSSI MASTER INTERFACE APPLICATION NOTEJULY 9TH, 2010Phone +65 6829 2348, Fax +65 6829 2121, www.fraba.sg, info@fraba.sg, Deutsche Bank AG Singapore, Bank Code: 7463, Branch Code: 001IMPLEMENTATION OF SSI MASTER INTERFACEAPPLICATION NOTET A B L E O F C O N T E N T STABLE OF CONTENTS (3)TABLE OF FIGURES (4)INTRODUCTION (5)1. SSI THEORY (6)2. SSI HARDWARE (10)Simple SSI Master Implementation (10)SSI Interface with Opto-coupler ( Galvanic Insulated) (11)Illustration of SSI Transfers using differential signals (12)3. SSI software (13)3.1 SSI Interface Using I/O Ports (13)3.2 Reading SSI with the SPI Port (15)3.3 Evaluating the data word (16)3.3.1 Separating Single Turn and Multi Turn values (17)3.3.2 Calculating an Angle from the Single Turn Value (19)Appendix a: complete software (21)Appendix B: References (26)History of changes (26)FRABA Pte. Ltd.8 Temasek Boulevard, #42-10 Suntec Tower Three, Singapore 038988Phone +65 6829 2348, Fax +65 6829 2121, www.fraba.sg, info@fraba.sg, Deutsche Bank AG Singapore, Bank Code: 7463, Branch Code: 001IMPLEMENTATION OF SSI MASTER INTERFACEAPPLICATION NOTET A B L E O F F I G U R E SFigure 1.0: SSI Logo (5)Figure 1.1: Simple SSI Block Diagram (6)Figure 1.2: SSI Timing Diagram (7)Figure 1.3: Multiple Transmissions in SSI Interface (8)Figure 1.4: Real World SSI Transfer (9)Figure 2.1: Simple SSI Master (10)Figure 2.2: SSI with Opto-coupler (Galvanic Insulated) (11)Figure 2.3: SSI transfer with differential signals (12)Figure 2.4: SSI transfer when encoder not connected (12)Figure 3.1: Code Example for Reading SSI Data by pin toggling (13)Figure 3.2: Transmission with Pin Toggle (14)Figure 3.3: Code Example: Main routine contains delay (14)Figure 3.4: Code Example: Using the SPI to read SSI data (15)Figure 3.5: SSI transfer using SPI (16)Figure 3.6: Code Example 4.4: Extracting Multi Turn and Single Turn values (17)Figure 3.7: Data Transfer (port toggling method) (17)Figure 3.8: Screenshot of Evaluation Result (18)Figure 3.9: Code Example: Extracting Multi Turn and Single Turn values (19)Figure 3.10: Screenshot with Angle Result (20)FRABA Pte. Ltd.8 Temasek Boulevard, #42-10 Suntec Tower Three, Singapore 038988Phone +65 6829 2348, Fax +65 6829 2121, www.fraba.sg, info@fraba.sg, Deutsche Bank AG Singapore, Bank Code: 7463, Branch Code: 001Phone +65 6829 2348, Fax +65 6829 2121, www.fraba.sg, info@fraba.sg, Deutsche Bank AG Singapore, Bank Code: 7463, Branch Code: 001Phone +65 6829 2348, Fax +65 6829 2121, www.fraba.sg, info@fraba.sg, Deutsche Bank AG Singapore, Bank Code: 7463, Branch Code: 001IMPLEMENTATION OF SSI MASTER INTERFACEAPPLICATION NOTEAn ideal SSI timing diagram can be found below, in figure 1.2.Figure 1.2: SSI Timing DiagramThe time ‘tm’ represents the transfer timeout. This is the time required by the encoder to recognize that a transfer is complete. ‘tp’ is called the pause time or the time delay between two consecutive clock sequences. It should always be greater than 21 µs, a maximum time is not defined.In idle state, encoder data line stays HIGH . After the first falling edge of the clock, the the position value of the encoder is still held constant with the Data Level still remaining in HIGH state.. With the first rising edge, the first bit, the MSB is transmitted each rising clock edge will trigger the transmit of a bit. Finally when the LSB is transferred (end of transmission) an additional rising clock will set the data output to LOW level. This will be held low for 20 ±1 µs (monoflop time). After the time is over the encoder will start to update the position value continuously and the data line is set to HIGH state. The next transmission is started with a train of clock pulses.The maximum clock frequency can be to 2MHz or higher (period of 500ns). The minimum clock frequency is 50 KHz. This value is determined by the timeout definition. For example, a timeout time of 20 ±1 µs corresponds to 50 KHz.FRABA Pte. Ltd.8 Temasek Boulevard, #42-10 Suntec Tower Three, Singapore 038988Phone +65 6829 2348, Fax +65 6829 2121, www.fraba.sg, info@fraba.sg, Deutsche Bank AG Singapore, Bank Code: 7463, Branch Code: 001IMPLEMENTATION OF SSI MASTER INTERFACEAPPLICATION NOTEMost of the SSI-devices implement multiple transmissions. Multiple transmission can be used to improve transfer safety by repeatedly reading the data word. The encoder will not update the data word before SSI timeout occurs. This has the consequence, that the encoder will always update its actual value into the output of the shift register. If it is continuously clocked, it leads to multiple transmissions of the same position data without updating. The two data words can be compared inside the SSI Master to recognize transmission errors,Figure 1.3: Multiple Transmissions in SSI InterfaceHowever, after n clocks (where ‘n’ is the resolution of the encoder), the following rising clock cycle (n+1) will set the data output to LOW level. If the master continues providing a clock signal, without waiting the transfer timeout,, the encoder repeats the data word starting with the MSB. ‘tw” should always be maintained less than 19 µs.Note that no particular start or stop sequence is required. The master simply starts clocking and stops when all necessary bits have been transferred. The clock rate should be more than the minimum clock rate of 80 KHZ and should not exceed 2MHz. The transfer pause between consecutive transfers has to be taken into account for updating the next position value. A running transmission can be interrupted at any time by just stopping the clock. The Slave than will recognize it after the tm time and just start to update it`s value.FRABA Pte. Ltd.8 Temasek Boulevard, #42-10 Suntec Tower Three, Singapore 038988Phone +65 6829 2348, Fax +65 6829 2121, www.fraba.sg, info@fraba.sg, Deutsche Bank AG Singapore, Bank Code: 7463, Branch Code: 001IMPLEMENTATION OF SSI MASTER INTERFACEAPPLICATION NOTETo understand the SSI interface based transfer more clearly, a real world illustration has been used.Figure 1.4: Real World SSI TransferThe above figure shows a real world example of a single transfer. The data word transferred is binary 0000 0000 1001 0110 1110 1010 or hex 0x00096EA. The interpretation of this value is device and sometimes configuration specific.Now we can clearly see that the data transmission stays HIGH until the first rising edge. At the first rising edge, DTA (the data transmission line) starts to transmit the data. Similarly, the transmission of data is completed by the last but one transmission edge ( ‘n th’ rising edge) and the next rising edge of the clock sets the DTA to LOW. Since the last bit transferred is 0, the timeout of the signal, 20µs is clearly visible.FRABA Pte. Ltd.8 Temasek Boulevard, #42-10 Suntec Tower Three, Singapore 038988Phone +65 6829 2348, Fax +65 6829 2121, www.fraba.sg, info@fraba.sg, Deutsche Bank AG Singapore, Bank Code: 7463, Branch Code: 001Phone +65 6829 2348, Fax +65 6829 2121, www.fraba.sg, info@fraba.sg, Deutsche Bank AG Singapore, Bank Code: 7463, Branch Code: 001D0D1D3D2Phone +65 6829 2348, Fax +65 6829 2121, www.fraba.sg, info@fraba.sg, Deutsche Bank AG Singapore, Bank Code: 7463, Branch Code: 001IMPLEMENTATION OF SSI MASTER INTERFACEAPPLICATION NOTEFRABA Pte. Ltd.8 Temasek Boulevard, #42-10 Suntec Tower Three, Singapore 038988Phone +65 6829 2348, Fax +65 6829 2121, www.fraba.sg, info@fraba.sg, Deutsche Bank AG Singapore, Bank Code: 7463, Branch Code: 001 Illustration of SSI Transfers using differential signalsFigure 2.3, shows DTA and CLK at the microcontroller (Ch #1 and Ch #2) and the differential signals to the decoder (D1, D2) and from the encoder (D3, D4).Figure2.3: SSI transfer with differential signalsWhen no encoder is connected, the receiver signals (DTA+ and DTA-) will be open. With the circuit shown in Figure 2.2, the following signals result:Figure 2.4: SSI transfer when encoder not connectedThe clock signal from the SSI master is present as usual, but both input lines (D2 and D3) are low. Since this means the LED inside the opto-coupler is not driven, the pull-up resistor at the output of the opto-coupler will return a high signal to the microcontroller (Channel #2).Phone +65 6829 2348, Fax +65 6829 2121, www.fraba.sg, info@fraba.sg, Deutsche Bank AG Singapore, Bank Code: 7463, Branch Code: 001This code results in the following transmission shown in Error! Reference source not found.:Figure 3.22: Transmission with Pin TogglePhone +65 6829 2348, Fax +65 6829 2121, www.fraba.sg, info@fraba.sg, Deutsche Bank AG Singapore, Bank Code: 7463, Branch Code: 001Phone +65 6829 2348, Fax +65 6829 2121, www.fraba.sg, info@fraba.sg, Deutsche Bank AG Singapore, Bank Code: 7463, Branch Code: 001Figure 3.5: SSI transfer using SPIPhone +65 6829 2348, Fax +65 6829 2121, www.fraba.sg, info@fraba.sg, Deutsche Bank AG Singapore, Bank Code: 7463, Branch Code: 001Figure 3.7: Data Transfer (port toggling method)Phone +65 6829 2348, Fax +65 6829 2121, www.fraba.sg, info@fraba.sg, Deutsche Bank AG Singapore, Bank Code: 7463, Branch Code: 001Phone +65 6829 2348, Fax +65 6829 2121, www.fraba.sg, info@fraba.sg, Deutsche Bank AG Singapore, Bank Code: 7463, Branch Code: 001Phone +65 6829 2348, Fax +65 6829 2121, www.fraba.sg, info@fraba.sg, Deutsche Bank AG Singapore, Bank Code: 7463, Branch Code: 001IMPLEMENTATION OF SSI MASTER INTERFACEAPPLICATION NOTEFigure 3.10: Screenshot with Angle ResultThe code example in Figure 3.9 generates the above sequence. We can continuously monitor the angular value of the encoder.FRABA Pte. Ltd.8 Temasek Boulevard, #42-10 Suntec Tower Three, Singapore 038988Phone +65 6829 2348, Fax +65 6829 2121, www.fraba.sg, info@fraba.sg, Deutsche Bank AG Singapore, Bank Code: 7463, Branch Code: 001IMPLEMENTATION OF SSI MASTER INTERFACEAPPLICATION NOTEA P P E N D I X A:C O M P L E T E S O F T W A R EIn addition to the functions already shown above, this code contains the routines used to write the data from the encoder to the UART port of the ATmega88. This data was then captured using Microsoft’s Hyperterminal software./*MH**************************************************************************** Module desc: SSI demo main file* (c) Copyright Fraba-Posital 2010* History:* 15Mar2010pme: created******************************************************************************//*IN************************************************************************** Include files *****************************************************************************************************************************************/#include <avr/io.h>#include <stdio.h>#include <stdint.h>/*TD************************************************************************** Type definitions****************************************************************************************************************************************//* add the missing type definitions for standard types */typedef unsigned char uint8_t;typedef signed char int8_t;/*// these are defined in stdint.htypedef unsigned short uint16_t;typedef signed short int16_t;*/typedef unsigned long uint32_t;typedef signed long int32_t;/*LC************************************************************************** Local constants and macros *****************************************************************************************************************************/#define USE_PIN_TOGGLING// defines, so we can change the SSI ports as necessary#define SSI_CLK_BIT 5#define SSI_CLK_PORT PORTB#define SSI_CLK_DDR DDRB#define SSI_DTA_PORT PIND#define SSI_DTA_BIT 0#define SSI_DTA_DIR DDRD#define SPI_MOSI_BIT 3#define SPI_MISO_BIT 4#define SPI_SS_BIT 2#define SPI_SCK_BIT 5// RS232 pins#define RS232_CTS 4 /* Port D4 */#define RS232_RXD 0 /* Port D0 */#define RS232_TXD 1 /* Port D1 */FRABA Pte. Ltd.8 Temasek Boulevard, #42-10 Suntec Tower Three, Singapore 038988IMPLEMENTATION OF SSI MASTER INTERFACEAPPLICATION NOTE// RS232 baud rate (assuming 8.0MHz internal RC oscillator)#define UART_BAUDRATE_9k6 51 // UBRR0L = 51; // 8.0e6/(16*9600)-1; 9600 Baud #define UART_BAUDRATE_19200 25 // UBRR0L = 25; // 8.0e6/(16*19200)-1; 19200 Baud #define UART_BAUDRATE_38400 12 // UBRR0L = 12; // 38400 Baud/*--------------------------- C O D E A R E A ------------------------------*//*FH************************************************************************** Name: pinToggleReadSSI* Parameters: -* Return value: value read from SSI* Description: read a 25 Bit SSI word using pin toggling*****************************************************************************/uint32_t pinToggleReadSSI( void ){uint8_t bit_count;uint32_t u32result = 0;uint8_t u8portdata;for (bit_count=0; bit_count<25; bit_count++){// falling edge on clock portSSI_CLK_PORT &= ~(1 << SSI_CLK_BIT);// left-shift the current resultu32result = (u32result << 1);// read the port datau8portdata = SSI_DTA_PORT;// rising edge on clock port, data changesSSI_CLK_PORT |= (1 << SSI_CLK_BIT);// evaluate the port data (port set or clear)if ( (u8portdata & (1 << SSI_DTA_BIT)) != 0){// bit is set, set LSB of resultu32result = u32result | 0x01;} // if} // forreturn u32result;} // pinToggleReadSSI/*FH************************************************************************** Name: spiInit* Parameters: -* Return value: -* Description: init SPI as master for use with SSI*****************************************************************************/void spiInit( void ){// configure SCK, MOSI and Slave Select as outputDDRB = (1 << SPI_SCK_BIT) | (1 << SPI_MOSI_BIT) | (1 << SPI_SS_BIT);// configure SPI as master, with CLK idle highSPCR = (1 << SPE) | (1 << MSTR) | (1 << CPOL);} // spiInitFRABA Pte. Ltd.8 Temasek Boulevard, #42-10 Suntec Tower Three, Singapore 038988IMPLEMENTATION OF SSI MASTER INTERFACEAPPLICATION NOTE/*FH************************************************************************** Name: spiReadSSI* Parameters: -* Return value: value read from SSI* Description: read a 25 Bit SSI word using the SPI interface*****************************************************************************/uint32_t spiReadSSI( void ){uint8_t u8byteCount;uint8_t u8data;uint32_t u32result = 0;for (u8byteCount=0; u8byteCount<4; u8byteCount++){// send a dummy byte, read the resultSPDR = 0xFF; // send 0xFF as dummyu32result <<= 8; // left shift the result so farwhile ( (SPSR & (1 << SPIF)) == 0); // wait until transfer completeu8data = SPDR; // read data from SPI registeru32result |= u8data; // and 'or' it with the result word }u32result >>= 7; // throw aways the LSBsreturn u32result;} // spiReadSSI/*FH************************************************************************** Name: rs232Init* Parameters: -* Return value: -* Description: initialize rs232 port pins and peripheral*****************************************************************************/void rs232Init( void ){// enable the port pullups for RS232PORTD |= (1 << RS232_RXD) | (1 << RS232_TXD) | (1 << RS232_CTS);// set port directionsDDRD |= (1 << RS232_TXD);// enable rs232 portUBRR0L = UART_BAUDRATE_38400; // Set BaudrateUCSR0A = 0x40; // clear TXCE bit, set everything else to 0UCSR0B = 0x18; // enable receiver and transmitterUCSR0C = 0x86; // no parity, 8bits} // rs232InitFRABA Pte. Ltd.8 Temasek Boulevard, #42-10 Suntec Tower Three, Singapore 038988IMPLEMENTATION OF SSI MASTER INTERFACEAPPLICATION NOTE/*FH************************************************************************* * Name: rs232send* Parameters: cbuffer - pointer to 0-terminated string (char buffer)* Return value: -* Description: sends the string by rs232*****************************************************************************/ void rs232send( char *cbuffer ){while (*cbuffer!= 0){UDR0 = *cbuffer;cbuffer++;asm( " wdr" );while ( ( UCSR0A & ( 1<< UDRE0)) == 0 );}} // rs232send/*FH************************************************************************* * Name: main* Parameters: -* Return value: -* Description: entry point and main loop*****************************************************************************/ int main(){int i;uint32_t u32ssiResult;uint16_t u16aux;uint16_t u16singleTurn;uint16_t u16multiTurn;char cBuffer[32];double dAngle;// init the rs232 interface to the PCrs232Init(); asm (" wdr ");rs232send( "Hello\n" ); asm (" wdr ");#ifdef USE_PIN_TOGGLING// enable clock output, set to highSSI_CLK_DDR |= (1 << SSI_CLK_BIT); // CLK is outputSSI_CLK_PORT |= (1 << SSI_CLK_BIT); // set to high (idle state)#elsespiInit();#endif// forever loopfor (;;){// get the SSI word#ifdef USE_PIN_TOGGLINGu32ssiResult = pinToggleReadSSI();#elseu32ssiResult = spiReadSSI();#endif// extract single and multiturn values from the data wordu16singleTurn = u32ssiResult & 0x0FFF;u16multiTurn = (u32ssiResult >> 12) & 0x0FFF;// calculate the single turn angledAngle = (double) u16singleTurn; // make the value floating pointdAngle = 360.0 * dAngle / 4096.0; // calculate actual angle// send the entire unmodified 32bit word to the PC in hex formatFRABA Pte. Ltd.8 Temasek Boulevard, #42-10 Suntec Tower Three, Singapore 038988IMPLEMENTATION OF SSI MASTER INTERFACEAPPLICATION NOTErs232send( "Raw value: " );u16aux = (u32ssiResult >> 16);sprintf( cBuffer, "0x%04x", u16aux );rs232send( cBuffer );u16aux = (u32ssiResult & 0xFFFF);sprintf( cBuffer, "%04x ", u16aux );rs232send( cBuffer );rs232send( "MT part " );sprintf( cBuffer, "0x%04x ", u16multiTurn );rs232send( cBuffer );rs232send( "ST part " );sprintf( cBuffer, "0x%04x ", u16singleTurn );rs232send( cBuffer );// we do not have sprintf for float, so first print the integer partu16aux = (uint16_t) dAngle;rs232send( "Angle " );sprintf( cBuffer, "%u", u16aux );rs232send( cBuffer );// then calculate two decimal places of the fractional partdAngle = (dAngle - u16aux) * 100;u16aux = (uint16_t) dAngle;sprintf( cBuffer, ".%u", u16aux );rs232send( cBuffer );// send CR/LFrs232send( "\r\n" );// delay at least 25µs for SSI timeoutfor (i=0; i<1000; i++){asm( " nop " ); // prevents the optimizer from removing the loop }}}/**************************************************************************** * End of source module*****************************************************************************/FRABA Pte. Ltd.8 Temasek Boulevard, #42-10 Suntec Tower Three, Singapore 038988IMPLEMENTATION OF SSI MASTER INTERFACEAPPLICATION NOTEA P P E N D I X B:R E F E R E N C E S[1] Atmel, ATmega88 datasheet[2] Maxim, Max1486 datasheetH I S T O R Y O F C H A N G E S•March 15th , 2010: First Version•July 9th,2010: Second VersionFRABA Pte. Ltd.8 Temasek Boulevard, #42-10 Suntec Tower Three, Singapore 038988。
YSG系列辊道用变频调速三相异步电动机
YSG系列辊道用变频调速三相异步电动机(H112~225mm)一、概述为适应冶金行业技术更新和设备改造,对交流调速技术应用的要求,开发了YSG系列辊道用变频调速三相异步电动机。
它具有体积小、调速范围广、运行可靠、维修方便等优点。
电动机采用耐高温润滑脂,并有再补给装置。
电动机具有加强的机械结构强度,能够在频繁起制动、正反转、反接制动等冲击性负载和高温、多粉尘环境的恶劣条件下连续或断续工作,并具有较高的过载能力。
电机技术条件符合IEC24-1和GB755国际和国家标准的规定,综合技术指标达到国内先进水平。
可与国内外各类变频装置配套使用,有助于节能和实现自控制。
YSG系列辊道用变频调速三相异步电动机按其机械特性可以分为YSGa型和YSGb型两种。
YSGa型电动机的机械特性较软,具有堵转转矩大、堵转电流小、动态常数高的特点,可以在30~80Hz的范围内调速运行。
主要用于驱动以S5工作制运行的工作辊道辊子。
YSGb型电动机具有较硬的机械特性,变频调速性能好,可以实现5~80Hz恒功率这样一个宽广的调速范围。
主要用于以S1工作制运行的输送辊道辊子,当采用变频控制时,利用变频品质低频起动功能和制动功能,还可以实现频繁起、制动和正、反转,用于以S5工作制运行的工作辊道辊子。
型号含义YSGa型电动机为周期工作制S5,负载持续率分为15%、25%、40%和60%四种,电动机可满压起动。
YSGb型电动机为连续工作制S1,当采用变频调速时,也可以周期工作制S5运行。
电动机的接法为Y/△联结,额定电压为380/22V,额定频率为50Hz。
电动机的绝缘等级为H级。
电动机的调速范围,YSGa型电动机为30~80Hz,YSGb型为5~80Hz。
电动机的过载能力强,能承受最大转矩15S。
电动机低速性能好,低速运行时转速平稳,无爬行现象。
二、结构简介YSG系列电动机的外壳防护等级为IP54,全封闭结构;电动机制冷却方式为IC410(全封闭自然冷却);电动机的结构及安装型式为IMB3、IMB5和IMB35三种。
YS12作业指导书9页word文档
YS12作业指导书文件编码编写审核一、目的1.将操作贴片机的作业步骤化,为操作员提供操作向导。
规范操作员作业程序和动作、以确保设备安全、正常运行,保障人员及公司产品的安全。
2.延长设备使用年限,减少设备故障,避免事故的发生。
二、范围此操作规程适用于YAMAHA YS12贴片机。
三、职责贴片机操作员依此指导书正确作业。
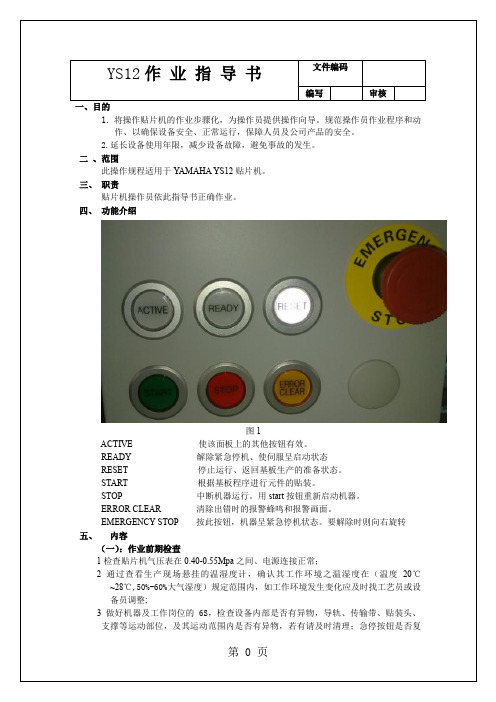
四、功能介绍图1ACTIVE 使该面板上的其他按钮有效。
READY 解除紧急停机、使伺服呈启动状态RESET 停止运行、返回基板生产的准备状态。
START 根据基板程序进行元件的贴装。
STOP 中断机器运行。
用start按钮重新启动机器。
ERROR CLEAR 清除出错时的报警蜂鸣和报警画面。
EMERGENCY STOP 按此按钮,机器呈紧急停机状态。
要解除时则向右旋转五、内容(一):作业前期检查1检查贴片机气压表在0.40-0.55Mpa之间、电源连接正常;2通过查看生产现场悬挂的温湿度计,确认其工作环境之温湿度在(温度20℃~28℃,50%-60%大气湿度)规定范围内,如工作环境发生变化应及时找工艺员或设备员调整;3做好机器及工作岗位的6S,检查设备内部是否有异物,导轨、传输带、贴装头、支撑等运动部位,及其运动范围内是否有异物,若有请及时清理;急停按钮是否复位,前防护盖是否关闭正常;4:确认机台送料器已牢牢固定在送料器上,没有浮起。
送料器上没有异物。
5:确认吸嘴没有缺损,黏附焊膏,回弹不良现象。
(二)作业步骤:1 开机(1)打开贴片机主控电源开关;向右旋转主控电源开关,使开关箭头指向ON 位置如图2,主控电源打开,贴片机主机上电,进行计算机启动以及设备硬件检测(自动完成),载入机器运行所需的程序后,显示【正在初始化】页面如图3。
图2图3 (2)返回原点初始化完成后用鼠标单击图4返回原点按钮,设备自动进行回原点操作,回原点完成后自动进入主界面。
向右旋转主控电源开关正在初始化页面点击返回原点按钮图4(3)暖机在图5页面点击暖机按钮,进入暖机界面;在暖机界面,单击在指定时间停止,在暖机时间文本框中输入暖机时间,一般为10分钟,单击开始,贴片机进入暖机操作;暖机完成后单击关闭按钮完成暖机返回主界面。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
报告编号:YSGL2#-1-9 工程名称 构件名称 构件编号 探伤部位名称 材料牌号 坡口形式 仪器型号 规格 天津冶金集团轧三友发搬迁改 造及配套2*1260m3高炉工程 2#高炉出铁场托梁 见示意图 钢板对接焊缝 Q235B X型 CTS-2200型 δ 16、20 mm 尺寸 探头规格 频率 a值 K值 13*13 mm 2.5MHZ 13 2.5 试块型号 CSK-ⅠA CSK-ⅢA 探伤灵敏度 Ф 1*6-9dB 耦合剂 表面状况 耦合补偿 探伤面 检验等级 扫描调节 执行标准 探伤比例 合格级别 焊接方法 焊缝总长 Ⅲ级合格; 距离波幅曲线图
(dB) 100
浆糊 打磨光亮 4 dB 单 面 两 侧 B级 深度1:1 GB11345-89 100% Ⅲ级 气体保护焊 38400mm
探伤结论:1、经探伤、按 GB11345-89 标准 距离波幅实测值
距离 波幅 距离 mm (dB) mm 波幅 (dB)
20 40 60 80 100
58 64 70 76 82
80
60
Ⅲ Ⅱ Ⅰ
40 20 0
20
40
60
80
100
(mm)
备
注
距离为横坐标,波幅为纵坐标。耦合差已计入曲线。 负责: 审核: 检验:
检验单位:
Байду номын сангаас