基于STC单片机的气缸控制系统设计与应用
单片机原理及应用系统设计-基于STC可仿真的IAP15W4K58S4系列课件第12章
0:PWM7 输出端口的初始电平为低电平。 1:PWM7 输出端口的初始电平为高电平。
12.2 IAP15W4K58S4单片机PWM模块的控制
3. PWM控制寄存器PWMCR
(注:前提条件是PWM和ADC必须被使能,即ENPWM==1,且 ADCON==1) CnINI:设置PWM 输出端口的初始电平,n=2~7。
0:PWM7 输出端口的初始电平为低电平。 1:PWM7 输出端口的初始电平为高电平。
12.2 IAP15W4K58S4单片机PWM模块的控制
CBTADC :PWM计数器归零时(CBIF=1 时)触发 ADC转换 0:PWM计数器归零时不触发ADC转换。 1:PWM计数器归零时自动触发ADC转换。(注:前
第12章 IAP15W4K58S4单片机的 PWM模块
1 单片机PWM模块的结构 2 单片机PWM模块的控制
3 单片机PWM模块的应用
第12章 IAP15W4K58S4单片机PWM模块
➢ IAP15W4K58S4单片机内部集成了一组(各自独立6路) 增强型的PWM波形发生器。
➢ 增强型PWM发生器大大增加了PWM控制的灵活性。
表12-5 PWM中断标志寄存器PWMIF各位定义。
位号 B7 B6 B5
B4
B3
B2
B1
B0
位名称 -
- ENFD FLTFLIO EFDI FDCMP FDIO FDIF
12.2 IAP15W4K58S4单片机PWM模块的控制
5. PWM外部异常控制寄存器PWMFDCR
该寄存器地址为F7H,复位值为00H。各位定义如表12-5所示。
STC8系列单片机开发指南:面向处理器、程序设计和操作系统的分析与应用

STC8系列单⽚机开发指南:⾯向处理器、程序设计和操作系统的分析与应⽤STC8系列单⽚机开发指南:⾯向处理器、程序设计和操作系统的分析与应⽤学习说明1 单⽚机和嵌⼊式系统基础知识1.1 嵌⼊式系统基本概念1.1.1 嵌⼊式系统的主要特点1.1.2 嵌⼊式技术的构成1.2 8051单⽚机内部结构1.3 8051单⽚机硬件开发平台1.4 运⾏第⼀个8051单⽚机程序1.5 8051单⽚机编程语⾔1.6 ⼩结2 STC单⽚机硬件知识2.1 STC单⽚机发展历史2.2 STC单⽚机IAP和ISP2.3 STC8系列单⽚机命名规则及封装2.3.1 命名规则2.3.2 封装类型2.3.3 引脚定义2.4 STC8系列单⽚机主要性能2.5 STC8系列单⽚机硬件下载电路设计2.5.1 通过USB-串⼝芯⽚的下载电路2.5.2 通过USB直接下载编程电路2.6 STC8系列单⽚机电源系统设计3 STC单⽚机软件开发环境3.1 Keil µVision集成开发环境介绍3.1.1 软件功能介绍3.1.2 软件的下载3.1.3 软件的安装3.1.4 导⼊STC单⽚机元件库3.1.5 软件的启动3.2 Keil µVision5软件开发流程3.2.1 明确软件需求3.2.2 创建设计⼯程3.2.3 编写汇编/C软件代码3.2.4 汇编器对汇编语⾔进⾏处理3.2.5 C编译器对C语⾔进⾏处理3.2.6 库管理器⽣成库⽂件3.2.7 链接器⽣成绝对⽬标模块⽂件3.2.8 ⽬标到HEX转换器3.2.9 调试器调试⽬标代码3.3 Keil µVision5基本的开发流程3.3.1 建⽴新的设计⼯程3.3.2 添加新的C语⾔⽂件3.3.3 建⽴设计3.3.4 下载程序到⽬标系统3.3.5 硬件在线调试4 数值表⽰及转换4.1 常⽤码制4.1.1 ⼆进制码制4.1.2 ⼗进制码制4.1.3 ⼋进制码制4.1.4 ⼗六进制码制4.2 正数表⽰⽅法4.2.1 正整数的表⽰4.2.2 正⼩数的表⽰4.3 正数码制转换4.3.1 ⼗进制正整数转换成其他进制数4.3.2 ⼗进制正⼩数转换成⼆进制正⼩数4.4 负数表⽰⽅法4.4.1 符号幅度表⽰法4.4.2 补码表⽰法4.5 负数补码的计算4.5.1 负整数补码的计算4.5.2 负⼩数补码的计算4.6 定点数表⽰4.7 浮点数表⽰5 STC单⽚机处理器内核和存储器系统5.1 STC单⽚机处理器内核功能单元5.1.1 控制器5.1.2 运算器5.1.3 特殊功能寄存器5.2 STC单⽚机的存储器结构和地址空间5.2.1 程序存储器5.2.2 内部数据存储器5.2.3 外部数据存储器6 STC单⽚机CPU指令系统6.1 STC单⽚机的CPU寻址模式6.1.1 ⽴即数寻址模式6.1.2 直接寻址模式6.1.3 间接寻址模式6.1.4 寄存器寻址模式6.1.5 相对寻址模式6.1.6 变址寻址模式6.1.7 位寻址模式6.2 STC单⽚机CPU指令集6.2.1 算术指令6.2.2 逻辑指令6.2.3 数据传送指令6.2.4 布尔指令6.2.5 程序分⽀指令7 STC单⽚机汇编语⾔编程基础7.1 汇编语⾔程序结构7.2 汇编代码中段的分配7.2.1 CODE段7.2.2 BIT段7.2.3 IDATA段7.2.4 DATA段7.2.5 XDATA段7.3 汇编语⾔符号及规则7.3.1 符号的命名规则7.3.2 符号的作⽤7.4 汇编语⾔操作数描述7.4.1 数字7.4.2 字符7.4.3 字符串7.4.4 位置计数器7.4.5 操作符7.4.6 表达式7.5 汇编语⾔控制描述7.5.1 地址控制7.5.2 条件汇编7.5.3 存储器初始化7.5.4 分配存储器空间7.5.5 过程声明7.5.6 程序链接7.5.7 段控制7.5.8 杂项7.6 Keil µVision5汇编语⾔设计流程7.6.1 建⽴新的设计⼯程7.6.2 添加新的汇编语⾔⽂件7.6.3 建⽴设计7.6.4 分析 “.m51”⽂件7.6.5 分析 “.lst”⽂件7.6.6 分析 “.hex”⽂件7.6.7 程序软件仿真7.6.8 程序硬件仿真8 STC单⽚机C语⾔编程基础8.1 常量和变量8.1.1 常量8.1.2 变量8.2 数据类型8.2.1 标准C语⾔所⽀持的类型8.2.2 单⽚机扩充的类型8.2.3 ⾃定义数据类型8.2.4 变量及存储模式8.3 运算符8.3.1 赋值运算符8.3.2 算术运算符8.3.3 递增和递减运算符8.3.4 关系运算符8.3.5 逻辑运算符8.3.6 位运算符8.3.7 复合赋值运算符8.3.8 逗号运算符8.3.9 条件运算符8.3.10 强制类型转换符8.3.11 sizeof运算符8.4 描述语句8.4.1 输⼊输出语句8.4.2 表达式语句8.4.3 条件语句8.4.4 开关语句8.4.5 循环语句8.4.6 返回语句8.5 数组8.5.1 ⼀维数组的表⽰⽅法8.5.2 多维数组的表⽰⽅法8.5.3 索引数组元素的⽅法8.5.4 动态输⼊数组元素的⽅法8.5.5 数组运算算法8.6 指针8.6.1 指针的基本概念8.6.2 指向指针的指针8.6.3 指针变量输⼊8.7 函数8.7.1 函数声明8.7.2 函数调⽤8.7.3 函数变量的存储⽅式8.7.4 函数参数和局部变量的存储器模式8.7.5 基本数据类型传递参数8.7.6 数组类型传递参数8.7.7 指针类型传递参数8.8 预编译指令8.8.1 宏定义8.8.2 ⽂件包含8.8.4 其他预处理命令8.9 复杂数据结构8.9.1 结构8.9.2 联合8.9.3 枚举8.10 C程序中内嵌汇编语⾔9 STC单⽚机I/O端⼝原理及驱动9.1 STC8系列单⽚机的I/O驱动原理9.2 I/O端⼝控制寄存器组9.3 汇编语⾔程序驱动端⼝的实现9.3.1 设计原理9.3.2 建⽴新的⼯程9.3.3 添加汇编语⾔源⽂件9.3.4 建⽴设计和下载9.4 C语⾔驱动端⼝的实现9.4.1 设计原理9.4.2 建⽴新的⼯程9.4.3 添加C语⾔源⽂件9.4.4 建⽴并下载设计9.5 汇编和C混合编程驱动端⼝9.5.1 添加和处理C语⾔与汇编语⾔源⽂件9.5.2 建⽴并调试设计10 STC单⽚机中断系统原理及实现10.1 中断原理10.2 中断系统结构10.3 中断向量表10.4 中断寄存器组10.4.1 中断使能寄存器组10.4.2 中断请求寄存器10.5 编写汇编语⾔实现中断功能10.5.1 设计原理10.5.2 建⽴新的⼯程10.5.3 添加汇编语⾔⽂件10.5.4 分析 “.lst”⽂件10.5.6 下载设计10.5.7 硬件仿真10.6 编写C语⾔实现中断功能10.6.1 C语⾔中断程序实现原理10.6.2 C语⾔中断具体实现过程10.7 中断优先级原理和中断嵌套的实现10.7.1 不同的中断条件及处理⽅式10.7.2 中断优先级控制寄存器10.7.3 修改中断优先级的实现11 STC8系列单⽚机时钟、复位和电源模式原理及实现11.1 STC8系列单⽚机时钟11.2 STC8系列单⽚机复位11.2.1 外部RST引脚复位11.2.2 软件复位11.2.3 掉电/上电复位11.2.4 MAX810专⽤复位电路复位11.2.5 内部低压检测复位11.2.6 看门狗复位11.3 STC单⽚机电源模式11.3.1 低速模式11.3.2 空闲模式11.3.3 掉电模式12 STC单⽚机⽐较器原理及实现12.1 STC单⽚机⽐较器结构12.2 STC单⽚机⽐较控制寄存器组12.2.1 ⽐较控制寄存器112.2.2 ⽐较控制寄存器212.3 STC单⽚机⽐较器应⽤:产⽣PWM信号13 STC单⽚机计数器和定时器原理及实现13.1 定时器/计数器模块概述13.2 定时器/计数器寄存器组13.2.1 定时器/计数器T0和T1控制寄存器TCON13.2.2 定时器/计数器T0和T1⼯作模式寄存器TMOD13.2.3 辅助寄存器AUXR13.2.4 T0~T2时钟输出寄存器和外部中断允许INT_CLKO(AUXR2)寄存器13.2.5 定时器计数器T3和T4控制寄存器T4T3M13.2.6 定时器中断控制寄存器13.3 计数器/定时器⼯作模式原理及实现13.3.1 定时器/计数器T0⼯作模式13.3.2 定时器/计数器T1⼯作模式13.3.3 定时器/计数器T2⼯作模式13.3.4 定时器/计数器T3⼯作模式13.3.5 定时器/计数器T4⼯作模式14 STC单⽚机串⾏异步收发器原理及实现14.1 RS-232标准概述14.1.1 RS-232传输特点14.1.2 RS-232数据传输格式14.1.3 RS-232电⽓标准14.1.4 RS-232参数设置14.1.5 RS-232连接器14.2 STC单⽚机串⼝模块概述14.2.1 串⼝模块结构14.2.2 串⼝引脚14.3 串⼝1寄存器及⼯作模式14.3.1 串⼝1寄存器组14.3.2 串⼝1⼯作模式14.3.3 串⼝1通信实例:LED灯的控制14.3.4 串⼝1通信实例:键盘扫描按键的显⽰14.4 串⼝2寄存器及⼯作模式14.4.1 串⼝2寄存器组14.4.2 串⼝2⼯作模式14.5 串⼝3寄存器及⼯作模式14.5.1 串⼝3寄存器组14.5.2 串⼝3⼯作模式14.6 串⼝4寄存器及⼯作模式14.6.1 串⼝4寄存器组14.6.2 串⼝4⼯作模式14.7 红外接收的设计与实现14.7.1 红外收发器的电路原理14.7.2 红外通信波形捕获14.7.3 红外通信协议14.7.4 红外检测原理14.7.5 设计实现15 STC单⽚机ADC原理及实现15.1 STC单⽚机内ADC的结构原理15.2 STC单⽚机内ADC寄存器组15.3 直流电压的测量和串⼝显⽰15.3.1 软件设计流程15.3.2 具体实现过程15.4 直流电压的测量和1602字符LCD的显⽰15.4.1 硬件电路设计15.4.2 1602字符LCD的原理15.4.3 软件设计流程15.4.4 具体实现过程15.5 交流电压参数测量和128.4 LCD显⽰15.5.1 硬件电路设计15.5.2 12864图形点阵LCD原理15.5.3 软件设计流程15.5.4 具体实现过程16 STC单⽚机增强型PWM发⽣器原理及应⽤16.1 脉冲宽度调制原理16.2 增强型PWM发⽣器模块16.2.1 增强型PWM发⽣器功能16.2.2 增强型PWM发⽣器寄存器集16.2.3 PWM中断的声明⽅式16.3 ⽣成单路PWM信号16.4 ⽣成两路互补PWM信号16.5 步进电机的驱动和控制16.5.1 五线四相步进电机⼯作原理16.5.2 步进电机的驱动16.5.3 使⽤软件驱动步进电机16.5.4 使⽤PWM模块驱动步进电机17 STC单⽚机I2 C原理及实现17.1 I2C总线规范概述17.2 I2C总线时序17.3 PCA9555的结构功能17.3.1 寄存器映射17.3.2 设备地址17.3.3 控制寄存器和控制字节17.3.4 寄存器描述17.3.5 总线交易17.4 STC8系列I2C控制器内的寄存器组17.4.1 I2 C主机模式17.4.2 I2 C从机模式17.4.3 I2 C数据寄存器17.5 七段数码原理及驱动电路的设计17.5.1 七段数码管原理17.5.2 七段数码管的驱动电路17.6 软件应⽤的设计与实现18 STC单⽚机SPI原理及实现18.1 SPI模块结构及功能18.1.1 SPI传输特点18.1.2 SPI模块功能18.1.3 SPI接⼝信号18.1.4 SPI接⼝的通信⽅式18.1.5 SPI模块的内部结构18.2 SPI模块的寄存器组18.3 SPI模块的配置和时序18.3.1 SPI的配置模式18.3.2 主/从模式的注意事项18.3.3 通过SS修改模式18.3.4 写冲突18.3.5 数据模式时序18.4 动态图形的交互设计18.4.1 触摸屏显⽰的控制⽅法18.4.2 触摸屏触摸控制⽅法18.4.3 STC单⽚机对触摸屏的初始化18.4.4 触摸屏基本绘图流程18.4.5 绘制不同图形的具体实现⽅法18.4.6 设计头⽂件说明18.4.7 主处理⽂件main函数设计19 STC单⽚机CCP/PCA/PWM模块的原理及实现19.1 CCP/PCA/PWM模块的结构19.2 CCP/PCA/PWM模块的寄存器组19.3 CCP/PCA/PWM⼯作模式19.3.1 捕获模式19.3.2 16位软件定时器模式19.3.3 ⾼速脉冲输出模式19.3.4 脉冲宽度调制模式20 µC/OS-II操作系统的原理及实现20.1 操作系统的必要性20.1.1 单任务程序20.1.2 轮询程序20.2 操作系统基本知识20.2.1 操作系统的作⽤20.2.2 操作系统的功能20.3 嵌⼊式操作系统20.4 µC/OS-II的概述20.4.1 任务及其种类20.4.2 创建任务20.4.3 任务调度20.4.4 任务挂起和恢复20.4.5 任务的删除20.4.6 任务的同步及通信20.4.7 动态内存管理20.5 在STC单⽚机上移植µC/OS-II20.5.1 修改OS_CPU.H⽂件20.5.2 任务堆栈的设计20.5.3 修改OS_CPU_C.C⽂件20.6 应⽤实例附录A 配套开发板原理图思维导图防⽌博客图床图⽚失效,防⽌图⽚源站外链:思维导图在线编辑链接:。
基于STC单片机控制的恒温浴缸的设计
基于STC单片机控制的恒温浴缸的设计
黄晓林
【期刊名称】《工业控制计算机》
【年(卷),期】2012(025)007
【摘要】针对目前恒温浴缸的技术缺陷,提出一种基于单片机控制的智能恒温浴缸的设计方案.该设计方案不但能实现恒温浴缸的所有功能需求,水温调节灵活方便,而且更大程度上注重系统运行过程中的稳定性和安全性,在硬件结构和软件设计上采取了多种保护的措施.从样机的运行测试结果来看,系统运行稳定、安全可靠,取得了满意的设计效果.
【总页数】3页(P92-93,97)
【作者】黄晓林
【作者单位】广东松山职业技术学院电气工程系,广东韶关512126
【正文语种】中文
【相关文献】
1.基于有限元法的恒温浴缸设计 [J], 张静怡;杨柳丛;阎少宏;王钰博;赵家敏;;;;;
2.基于STC单片机的恒温热水器模糊控制 [J], 莫树培
3.基于有限元法的恒温浴缸设计 [J], 张静怡;杨柳丛;阎少宏;王钰博;赵家敏
4.基于STC单片机的太阳能恒温箱设计 [J], 王君玲;吴栋;刘怡;刘理想;魏彬
5.基于仿真模拟的恒温浴缸设计 [J], 郑伟; 廖忠; 梁拓
因版权原因,仅展示原文概要,查看原文内容请购买。
单片机控制气缸__解释说明以及概述
单片机控制气缸解释说明以及概述1. 引言概述在现代工程和自动化系统中,单片机控制气缸技术发挥着重要的作用。
通过使用单片机来控制气缸的运动,可以实现各种复杂的任务和功能。
本文将深入探讨单片机控制气缸的原理、应用领域以及其在工业、家庭智能化和农业领域中的实例应用与案例分析。
文章结构本文共分为五个部分进行阐述。
首先是引言,旨在对单片机控制气缸进行概述,并明确文章结构与目的。
接下来是"单片机控制气缸解释说明",我们将介绍什么是单片机控制气缸以及其工作原理和机制。
然后,在"单片机控制气缸的组成部分"一节中,我们将讨论选择与配置适合单片机控制气缸的单片机、传感器与信号采集方法以及控制电路设计与实现。
接着,在"实例应用与案例分析"部分,我们将提供工业自动化、家庭智能化和农业领域中单片机控制气缸应用的具体实例。
最后,在"结论与展望"一节中,我们将总结文章的要点和观点,并对未来单片机技术发展前景进行展望和思考。
目的本文旨在全面介绍单片机控制气缸技术,在解释说明其原理和机制的基础上,深入探讨其应用领域和优势。
通过对单片机选择与配置、传感器与信号采集以及控制电路设计与实现等相关内容的讨论,读者将能够更好地理解如何实现单片机控制气缸系统。
此外,通过提供工业自动化、家庭智能化和农业领域中的实例应用与案例分析,读者还可以了解到该技术在不同领域的具体应用情况。
最后,本文还将尝试对未来单片机技术发展进行一定程度的预测和思考。
以上是引言部分的详细内容,请根据需求适当调整或扩充。
2. 单片机控制气缸解释说明:2.1 什么是单片机控制气缸:单片机控制气缸是将单片机与气动执行元件气缸相结合,通过单片机对气缸进行控制和驱动的一种技术。
通过单片机的指令和信号输出,可以实现对气缸的运动、停止和位置等参数的精确控制。
这种技术在自动化领域中得到广泛应用,主要用于实现各种工业、家庭和农业设备中的运动和定位功能。
基于STC单片机控制的恒温浴缸的设计
性地提 出了消 除差距 的建议 。
关 键 词 : 大 学 生 ;就 业 力 ;社 会 需 求 ;差 距
发 展机 制 ,一 方 面 以低 端 制造 为 主的 产业 结 构严 重 制 约 了大 学生 就业 岗位 的创造 ;另一 方 面高 等 教育 的培养 质量 也 无法 满 足产 业 优化 升级 发展 对 高 素质 人 才 的要 求 。解决 这 一 问题 的关 键在 于提 升 大学 生 持续 学 习新 的知 识 ,更需 要 从根 本 上适 应非 终 身制 的就业 力 ,这 也 是促进 高 等教 育 人才 培养 与 社 会人 的职涯发展路径 。面对 这样的时代挑 战,大学毕业生 才 需求对 接 的突破 口。 必 须 具 备与 实 际工作 需 求相 适应 的就 业力 ,才 能成 二 大学 生 就 业 力 与社 会 需 求 的差 距 分析 功在 职场 发展 。
受 到 全球 金融 危机 与 知识 经济 的冲击 ,以 及我 国劳 动 市场 急剧 变化 的 影 响 ,大 学 毕业 生在 进入 职 场时 ,不仅需要 面对激 烈的人才竞争 、快 速调整 的产 业结构 ,还需要拥有 主动学习的能力 ,能够根据需求
文 的调 查结 果 显示 ,用 人 单位认 为 重 要 的就 业力 高且愿 意主动 学 习的大学生 ,提 高毕业 生的就 业力 , 基 本属 于 人 际技 能和 个人 素质 范 畴 ,列 出在 实 际工 从根本 上缩小 大学生 就业力 与实 际需求之 间 的差距 , 作 中要求最高的 1 项核心就业力分别为 :责任心 、团 0 成为 高校教 育 工作亟 需解 决的一 个 问题 。 队协作 能力 、倾 听能力 、谈判 能力 、 口头表达 能力 、 忠诚度 、 问题解决能力 、学 习能力 、处理 人际冲突能 基 本 概 况 及 相 关 概 念 力 、压力承受能力 。而相 对不重要的就业 力则多数与 大学 生就 业 力是 指大 学 生在 经 过大学 阶段 的学 学 历教 育直接 相关 ,如计算 机应 用能力 、专业 知识 、 习之后 ,具备 的找到工作 、保有工 作以及 做好工作 的 外语等 。根据 美 国联邦 政府 “ 教育 、科学 和培 训部 ” 能力 ,是大学生 必须掌握的一种就业 技能 ,是在更高 的调 查 ,被众 多 公 司公认 为 是最 不可 缺 少 的就 业 力 层 面 上 引领 社会 进 步和 实 现个 人成 长 发展所 需 要 的 同样属 于个人 技能和 素质范 畴 ,基 本包 括沟通 能力 、 生产力 、学 习力 与创新力。对大学 生个人而言 ,就业 计 划和组织能力 、团队工作能力 、 自我管理能力 、问 力既取决于大学生 本身拥有的知识 、技能与态度 ,也 题 处理能力 、学 习能 力、主动性与事业心 ( 进取心 ) 、 取 决 于大 学 生利 用这 些 资源 的方 式 ,以及在 求 职 时 科技 等八 个方 面 。 由此 可 以看 出实 际工 作 中需 求 的 怎样呈现这 些 内容 。要具备 充足 的就业力 ,个人 不只 就业力 的主要成 分就 是大 学生 自身 的技 能和 素质 。 需要 充 实专 业 知识 与技 能 ,培 养有 利 于就 业 的态 度 ( ) 大 学 生 的 就 业 力 水 平 二 与 个人 特质 ,还需 要 搜集 有用 的职 场信 息 进行 合理 从 笔者对 0 、0 、1 届 毕业生 的抽样调查来看 , 8 9 0 的职业选择 ,并且需要多方尝试 实际工作 ,从工 作经 大多 数 毕业 生在 求职 前认 为 用 人单 位最 看 重 的是思 验 中得到学 习 与成 长 。 想品德 、工作 或实 习经验 ,其次是相貌 仪表和学 习能 2 9年 山东省高校 毕业生 就业能力调查 报告 力与 适 应能 力 。很 多毕业 生 认为 责任 心 和 人 际交往 0 0 中提 出,从 根本上破解大学生就业难题 ,必须把 大学 能力 ,用人单位在招聘 时无法直接考量 ,因此最不 看 生就业政策 的 目标从提高 “ 业率”转 向提升 “ 业 重 的是 责任 心和 人 际交 往能 力 。这 就 造成 大学 生 在 就 就 力” ,将过 去 毕业 之 际的就 业指 导与 供 需见 面政 策 , 对就业 力 的认 识上 与实 际工作要 求有 了一定 的差距 。 向前推 进 到高 等教 育 过程 中 ,建立 以培养 大学 生 就 而根 据 近几 年 与用 人单 位 的联 系 ,笔 者 了解 到大 部 业力为核心 ,政府 、高校 、用人单位紧密配合 、整体 分毕业生在倾 听能力 、谈判 能力 、 口头表达能力 、压 推动 的就业政 策体系 。文章认 为 ,当前大学生就业难 力 承受 能力 等方 面相 对 欠缺 ,都成 为 用人 单位 在 招 问题 的根源 并 不在 于 大学 生数 量过 多 ,而在于 没 有 聘 、选用 毕业生 时的最大顾忌与疑虑 。而 以上这些 能 形成 高 等教 育质 量 提升 与 产业 优化 升 级 的 良性 互 动 力 的缺 失或 不足 ,正是 高等 教 育与 劳 动力 市场 需 求
气缸控制原理及设置

气缸控制原理及设置表格程序控制器是一种采用表格设置汉字显示的可设置控制器,基本型的JK-TPC 8-8 TD型具有8路输入和8路输出控制端,能够方便地迅速实现设备控制。
该控制器适合用于设备的开关量控制,可以控制单个电磁阀或多个电磁阀的启动、停止及程序运行等功能。
无需编程,采用表格设置方式快速实现所需的定时和程序控制功能。
简单易用,非常适合不熟悉编程的人员使用。
因此,采用精控定时程序控制器来实现电磁阀的控制十分方便、实用。
基本功能:通过设置能够实现:程序控制定时器、顺序定时控制、逻辑控制、点动继电器、锁存继电器、点动开关、软启动开关、自锁开关、延时开关等功能。
应用领域:各行业工业自动化控制,例如:机械自动化控制、服装机械控制、纺织机械控制、食品机械控制、电器控制、家电控制、机械手、灯光控制、节能控制、交通控制、喷泉控制、液位控制、电机控制、注塑机控制、电机控制、大中小学科普及应用等自动化控制普及领域。
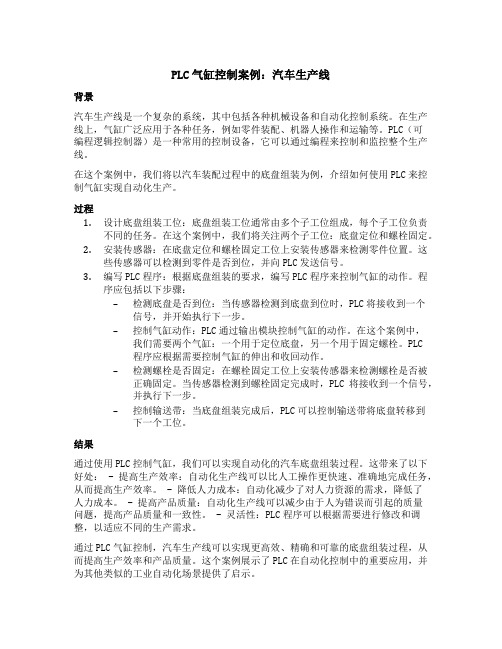
工作原理及设置(8路气缸控制的示例):气缸控制所实现的功能主要分为启动、停止及程序运行控制,下面以8路气缸控制为例加以说明:本例是最简单的顺序驱动功能的示例,对8个电磁阀进行顺序启动,每路气缸定时不同。
为使控制简单化,采用同时启动、不同延时、各自定时的方法实现,8个电磁阀分别由输出端Y1-Y8驱动,数行设置数据解决实际问题。
具体设置方法请参见下图,下图是设置好的功能设置表:1、设置每行程序均由X1与X2同时动作时启动,将他们之间的逻辑关系设为“与”“AND”的逻辑。
2、设置设置每行程序都由X3停止。
3、设置每行程序分别连接输出端Y1-Y8。
4、设置行程序的延时定时及输出定时时间,延时定时时间为X2、X3启动后该行程序需要的延时,输出定时是每行程序的实际工作时间。
5、运行时,X1与X2同时动作时启动8行程序同步工作,各行程序进入本行程序的延时,然后分别进入各自的输出定时而使输出端有效,驱动各自电磁阀按设定的定时工作。
STC单片机原理及应用:从器件、汇编、C到操作系统的分析和设

12.5红外通信 的原理及实现
1
13.1模数转换 器原理
13.2 STC单片 2
机内ADC的结 构原理
3 13.3 STC单片
机内ADC寄存 器组
4 13.4直流电压
测量及串口显 示
5 13.5直流电压
测量及LCD屏 显示
13.6交流电压 测量及LCD屏显
示
13.7温度测量 及串口显示
1
14.1脉冲宽度 调制原理
8.3运算符
4
8.4描述语句
5
8.5数组
1
8.6指针
2
8.7函数
3
8.8预编译指 令
4
8.9复杂数据 结构
5
8.10 C程序中 使用汇编语言
8.11 C语言端 口控制实现
8.12 C语言中 断程序实现
9.2 STC单片机复 位
9.1 STC单片机时 钟
9.3 STC单片机电 源模式
10.2 STC单片机比 较器寄存器组
02
7.2汇编代 码中段的分 配
03
7.3汇编语 言符号及规 则
04
7.4汇编语 言操作数描 述
06
7.6 KeilμVi sion5汇编 语言设计流 程
05
7.5汇编语 言控制描述
7.7单片机端口 控制汇编语言 程序设计
7.8单片机中断 汇编语言程序 设计
1
8.1常量和变 量
2
8.2数据类型
3
本书是为单片机相关课程教学而编写的教材。全书共分为17章,主要内容包括:单片机和嵌入式系统基础知 识,STC单片机硬件知识,STC单片机软件开发环境,数值表示及转换,STC单片机架构,STC单片机CPU指令系统, STC单片机汇编语言编程模型,STC单片机C语言编程模型,STC单片机时钟、复位和电源模式原理及实现,STC单 片机比较器原理及实现,STC单片机计数器和定时器原理及实现,STC单片机异步串行收发器原理及实现,STC单 片机ADC原理及实现,STC单片机增强型PWM发生器原理及实现,STC单片机SPI原理及实现,STC单片机 CCP/PCA/PWM模块原理及实现,RTX51操作系统原理及实现。
单片机原理及应用系统设计-基于STC可仿真的IAP15W4K58S4系列课件第16章
16.2.3 指纹识别技术
指纹图像对比判断:获取到指纹图像之后,为了判别出 获取到的指纹到底是谁的指纹,就需要对指纹与指纹数据 库中的指纹进行对比判断。进行对比判断就需要一个算法, 这就是指纹识别算法。指纹识别算法是指纹识别技术的关 键,算法的好坏,直接影响到拒识率和误识率,以及系统 的运行速度等。
就是说那些用肉眼可以直接观察到的特点,这些特点比如有: 纹形、模式区、核心点、三角点和纹数等。指纹总体特征图如 图16-1所示。
图16-1 指纹总体特征图
16.2 指纹识别技术与整体设计方案
局部特征:手指指纹的有许多不能一眼看出来的小细节,这 些细节需要仔细看才能分辨出它的区别,这些特征就是局部 特征。手指指纹的纹线,不是一直连续的,会出先一些分叉 和中断,这些小的细节使得指纹进一步区别。相同的指纹在 总体特征上面可能一致,但在局部特征上面却是不同的,这 就为指纹的唯一性提供了确认信息。
鉴于指纹识别技术具有以上的优点,所以利用人的指 纹特征进行身份识别是十分优秀的,并且在各个领域都有 广阔的应用前景和无比巨大的市场潜力,值得去进行开发。
16.2 指纹识别技术与整体设计方案
16.2.1 指纹特征介绍 指纹是指的是在手指末端正面的皮肤上线条构成的纹路,
线条的方向不同,弯曲程度不同,就构成了不一样的指纹。 指纹图像分为两大类:总体特征和局部特征两大类。 总体特征:指的是指纹的宏观上面所体现出来的特征,也
另添加OLED显示屏、JQ6500语音芯片提示用户操作并返回 操作结果,并且配有GSM模块和用户手机进行通信,及时反映 异常状态并且报警,用户也可以通过短信打开门禁,进一步提 高了警戒级别。
16.3 系统硬件设计
系统总体结构框图如图16-3所示。
项目3气缸PLC控制PPT

气缸的工作原理和控制需求
工作原理
气缸是一种将压缩空气转换为机 械能的装置,通过活塞在气缸内 的往复运动实现直线运动或旋转 运动。
控制需求
需要实现对气缸的启动、停止、 方向控制、速度调节等基本功能 ,同时要求控制系统具有高可靠 性、快速响应和稳定性。
降低维护成本
PLC控制系统具有自诊断 功能,可以快速定位故障, 降低维护成本。
提高产品质量
精确的控制可以减少生产 过程中的误差,从而提高 产品质量。
项目范围和限制
仅涉及气缸的PLC控制
硬件和软件的限制
项目主要针对气缸的PLC控制进行设 计和实现,不涉及其他设备的控制。
由于预算和实际条件的限制,选用的 PLC型号和软件应符合实际需求。
定期清洁
02
定期清洁PLC模块、气缸及其附件,保持设备清洁。
记录与报告
03
建立维护记录,及时报告异常情况。
控制系统的故障诊断和排除
故障诊断流程
建立故障诊断流程,明确故障排查步骤。
常见故障及处理方法
列出常见故障及相应的处理方法,方便快速 解决问题。
故障预防措施
提出预防故障的措施,降低故障发生概率。
THANKS
选择合适的编程语言进行PLC程序的编写,如 Ladder Logic、Structured Text等。
3
人机界面
设计易于操作的人机界面,实现实时监控和控制 功能。
控制系统的安装和调试
安装
根据设计图纸和规范,正确安装硬件设备,确保 连接可靠、布局合理。
调试
对控制系统进行调试,检查输入输出设备的正确 性、控制算法的可行性、人机界面的可用性等。
stc32位8051单片机原理及应用

stc32位8051单片机原理及应用一、概述STC32位8051单片机是一款基于8051内核的微控制器,由STC(System Technology Company)公司设计生产。
与传统的8位8051单片机相比,STC32位8051单片机在处理速度、存储容量、功能模块等方面都有显著提升,使其在工业控制、智能家居、物联网等领域得到广泛应用。
二、STC32位8051单片机的特点1. 高速处理能力:STC32位8051单片机采用32位CPU内核,比传统的8位8051单片机处理速度更快,能够更好地满足复杂控制和数据处理的需求。
2. 大容量存储:STC32位8051单片机内部集成了大容量Flash程序存储器和RAM数据存储器,方便用户存放大量程序和数据。
3. 丰富的外设接口:STC32位8051单片机集成了多种外设接口,如UART、SPI、I2C、CAN 等,方便与外部器件进行通信和控制。
4. 低功耗设计:STC32位8051单片机采用低功耗设计,能够有效地降低系统功耗,延长系统使用寿命。
5. 抗干扰能力强:STC32位8051单片机具有较强的抗干扰能力,能够在较为恶劣的环境下稳定工作。
三、STC32位8051单片机的应用STC32位8051单片机因其高速处理能力、大容量存储、丰富的外设接口和低功耗设计等特点,被广泛应用于以下领域:1. 工业控制:STC32位8051单片机可应用于各种工业控制系统中,如电机控制、温度控制、压力控制等。
2. 智能家居:STC32位8051单片机可应用于智能家居系统中,如智能照明、智能安防、智能环境监测等。
3. 物联网:STC32位8051单片机可应用于物联网设备中,如智能传感器、智能网关、智能终端等。
4. 其他领域:除以上领域外,STC32位8051单片机还可应用于医疗器械、仪器仪表、智能交通等领域。
四、STC32位8051单片机的开发环境STC32位8051单片机的开发环境可以采用STC提供的Keil软件,该软件支持多种单片机的开发,提供了丰富的库函数和调试工具,方便用户进行程序的编写和调试。
单片机原理及应用系统设计-基于STC可仿真的IAP15W4K58S4系列课件第1章

MFLT_2
P0.0 AD0 RxD3 P0.1 AD1 TxD3 P0.2 AD2 RxD4 P0.3 AD3 TxD4 P0.4 AD4
T3CLKO
P0.5 AD5
说明
标准I/O PORT0[0] 地址/数据总线
串口3数据接收端
标准I/O PORT0[1] 地址/数据总线 串口3数据发送端 标准I/O PORT0[2] 地址/数据总线 串口4数据接收端 标准I/O PORT0[3] 地址/数据总线
当8路D/A使用; • 比较器,可当1路ADC使用,并可作掉电检测,支持外部管脚
CMP+与外部管脚CMP-进行比较,可产生中断,也支持外部管 脚+与内部参考电压进行比较; • 6通道15位专门的高精度PWM(带死区控制),加上2路CCP, 可用来再实现D/A; • 共7个定时器/计数器,其中5个16位可重装定时器/计数器;
1.2 常用主流单片机
• 8051单片机 • STC单片机 • AVR单片机 • PIC单片机 • MSP430单片机 • 基于ARM核的单片机
1.3 IAP15系列单片机简述
• IAP15系列单片机是STC产品中STC15系列中的一个特殊 系列。采用STC-Y5超高速CPU内核,在相同的时钟频率 下,速度比 STC早期的1T系列单片机(如 STC12系列、 STC11系列、STC10系列)的速度快20%。
1.3.1 IAP15W4K58S4单片机
1.内部结构
• IAP15W4K58S4是属于STC15W4K32S4系列单片机中的一 种,其内部结构相同。内部结构框图如图1-6所示,主要包 括CPU、程序存储器(Flash)、数据存储器(SRAM)、 定时器/计数器、掉电唤醒专用定时器、I/O口、高速A/D转 换、比较器、看门狗、高速异步串行通信端口UART1-4、 CCP/PWM/PCA、高速同步串行端口SPI,片内高精度R/C 时钟及高可靠性复位等模块。
基于stc单片机的双气缸协作控制系统设计与教学平台开发

二:电气结合方式,采用小电流主令电器行程开关或干簧
快速发展,干净、轻便、低耗、高效的气动技术应用越来
管传感器作为信号发生元件,继电器作为信号处理元件,
越普遍。气缸是自动化控制系统中常用的执行元件,可以
二位五通电磁阀作为控制元件;方案三:在方案二的基础
实现推送物体时的直线往复运动,可靠性高。通过调节单
物流分拣线
传统上,有多种方案可以满足两缸协同工作的控制要
求。方案一:全气动方式,采用带行程开关的机动换向阀
业机器人编程语言与 C 语言程序结构类似。所以,价格
低、体积小、功耗低、以 C 语言为编程基础的单片机技
术相对于 PLC 具有不可小觑的优势。因此,本文采用方
基金项目: 湖北省职业技术教育学会科学研究课题 (编号:ZJZB201806)
机
第 48 卷
第 10 期
电 工 程
技 术
MECHANICAL & ELECTRICAL ENGINEERING TECHNOLOGY
Vol.48 No.10
DOI: 10. 3969 / j. issn. 1009-9492. 2019. 10. 024
武志鹏. 基于STC单片机的双气缸协作控制系统设计与教学平台开发 [J] . 2019,48 (10):74-76.
强、教学方便,能以较低成本完成集气动控制、电气安装、电子制作和单片机编程为一体的课程教学。
关键词:气动控制;单片机;多缸协作;一体化教学
中图分类号:TP273
文献标志码:A
文章编号:1009-9492 ( 2019 ) 10-0074-03
Design and Development of Double Cylinder Cooperative Control System
单片机原理及应用系统设计-基于STC可仿真的IAP15W4K58S4系列课件第12章
12.1 IAP15W4K58S4单片机PWM模块的结构
--IAP15W4K58S4单片机PWM模块的结构
图12-1 PWM波形发生器结构框图
12.2 IAP15W4K58S4单片机PWM模块的控制
2. PWM配置寄存器PWMCFG 该寄存器地址为F1H,复位值为00H。各位定义如表12-2所示。
表12-2 PWM配置寄存器PWMCFG各位定义
位号 B7 B6
B5
B4 B3
B2
B1
B0
位名称 - CBTADC C7INI C6INI C5INI C4INI C3INI C2INI
CBTADC :PWM计数器归零时(CBIF=1 时)触发ADC转换 0:PWM计数器归零时不触发ADC转换。 1:PWM计数器归零时自动触发ADC转换。
ECBI :PWM计数器归零中断使能位 0:关闭PWM计数器归零中断(CBIF依然会被硬件置位)。 1:使能PWM计数器归零中断。
ENCnO :PWMn 输出使能位,n=2~7。 0:PWM通道n的端口为GPIO。 1:PWM通道n的端口为PWM输出口,受PWM波形发生器控制。
12.2 IAP15W4K58S4单片机PWM模块的控制
B5
B4
B3
B2
B1
B0
Reset Value
PWM 2T2H
FF02 H(XS FR)
name
-
PWM 2T2H[ 14:8]
x000,0 000B
PWM 2T2H
FF02 H(XS FR)
name
-
PWM 2T2H[ 14:8]
STC单片机开发系统的建立及使用

实验一:STC单片机开发系统的建立及使用——Keil μVision、Proteus软件的使用——单片机最小硬件系统搭建【实验目的】:(1)、学习、掌握和使用8051单片机开发软件KeilμVision的使用,在该开发平台的支持下,完成汇编语言程序的编写、调试等开发的过程。
(2)、掌握STC单片机最小硬件系统的原理,并使用面包板搭建STC单片机最小硬件系统;了解LY-51S单片机开发板的功能和使用方法;掌握STC单片机下载软件的使用方法。
(3)、学习、掌握Proteus仿真软件的使用方法,使用该软件搭建8051单片机电路,配合KeilμVision软件生成的代码,学习、调试单片机的硬件系统。
【实验仪器及材料】PC计算机1台、直流稳压电源1台、LY-51S单片机开发板1块(含STC89C52RC 单片机)、30pF瓷片电容2只、10uF电解电容1只、10K电阻1只、330Ω电阻1只、LED发光二极管1只、12MHz石英晶振1只、面包板1块(含连线若干)【实验原理/实验基础知识】单片机最小硬件系统由时钟电路、复位电路、电源电路及单片机构成,任何单片机应用系统均是在最小系统的基础之上扩展而来。
STC单片机属于可以ISP编程的单片机,其ISP功能由单片机机的UART (Universal Asynchronous Receiver Transmitter通用异步收发器)实现,使用PC机的串行通信接口来下载程序。
PC机的串行通信接口为RS-232逻辑电平,需要通过一个RS-232到TTL电平的转换芯片才能与单片机连接,也可以通过USB转串行接口芯片来连接单片机。
LY-51S单片机开发板为功能模块独立设计的开发板,板上带有RS232转TTL 电平芯片MAX232、USB转串口芯片PL2303,可以直接连接PC机RS232串口或PC机USB 接口。
根据实验需求使用杜邦线连接开发板各功能模块。
【实验内容及步骤】:1、认识LY-51S单片机开发板各功能部件2、安装KeilμVision软件、Proteus软件、STC单片机下载软件。
单片机原理及应用系统设计-基于STC可仿真的IAP15W4K58S4系列课件第10章
3
为确保转换结果的精确度,A/D转换器必须满足一定的转换 精度和速度。转换精度和转换速度是衡量A/D转换器的重要 技术指标。此外还有分辨率、量程、量化误差、线性度等。
1. 分辨率 ➢ 分辨率表示A/D转换器对微小输入信号变化的敏感程度,
通常用转换后数字量的位数来表示。 ➢ N位转换器,其数字量变化范围为0~2N-1。 ➢ 例 如 8 位 A/D 转 换 器 , 输 入 5V 满 量 程 电 压 , 则 分 辨 率 为
• #define P1ASF_2
0x04 //设置P1.2口为ADC端口
• #define P1ASF_3
0x08 //设置P1.3口为ADC端口
• #define P1ASF_4
CLK_DIV/PCON中,用于控制ADC转换结果存放的位置。 ➢ 其各位定义如表10-5所示。
➢ ADRJ:ADC转换结果存储格式调整控制位 • ADRJ=0:ADC_RES存放高8位ADC结果, ADC_RESL存放低2位ADC结果。 • ADRJ=1:ADC_RES存放高2位ADC结果, ADC_RESL存放低8位ADC结果 17
,中速(转换时间<1ms)和低速(转换时间<1s)等。
在实际应用中,应从系统数据总的位数、精度要求、输入 模拟信号的范围及输入信号极性等方面综合考虑A/D转换 器的选用。
plc气缸控制案例
PLC气缸控制案例:汽车生产线背景汽车生产线是一个复杂的系统,其中包括各种机械设备和自动化控制系统。
在生产线上,气缸广泛应用于各种任务,例如零件装配、机器人操作和运输等。
PLC(可编程逻辑控制器)是一种常用的控制设备,它可以通过编程来控制和监控整个生产线。
在这个案例中,我们将以汽车装配过程中的底盘组装为例,介绍如何使用PLC来控制气缸实现自动化生产。
过程1.设计底盘组装工位:底盘组装工位通常由多个子工位组成,每个子工位负责不同的任务。
在这个案例中,我们将关注两个子工位:底盘定位和螺栓固定。
2.安装传感器:在底盘定位和螺栓固定工位上安装传感器来检测零件位置。
这些传感器可以检测到零件是否到位,并向PLC发送信号。
3.编写PLC程序:根据底盘组装的要求,编写PLC程序来控制气缸的动作。
程序应包括以下步骤:–检测底盘是否到位:当传感器检测到底盘到位时,PLC将接收到一个信号,并开始执行下一步。
–控制气缸动作:PLC通过输出模块控制气缸的动作。
在这个案例中,我们需要两个气缸:一个用于定位底盘,另一个用于固定螺栓。
PLC程序应根据需要控制气缸的伸出和收回动作。
–检测螺栓是否固定:在螺栓固定工位上安装传感器来检测螺栓是否被正确固定。
当传感器检测到螺栓固定完成时,PLC将接收到一个信号,并执行下一步。
–控制输送带:当底盘组装完成后,PLC可以控制输送带将底盘转移到下一个工位。
结果通过使用PLC控制气缸,我们可以实现自动化的汽车底盘组装过程。
这带来了以下好处: - 提高生产效率:自动化生产线可以比人工操作更快速、准确地完成任务,从而提高生产效率。
- 降低人力成本:自动化减少了对人力资源的需求,降低了人力成本。
- 提高产品质量:自动化生产线可以减少由于人为错误而引起的质量问题,提高产品质量和一致性。
- 灵活性:PLC程序可以根据需要进行修改和调整,以适应不同的生产需求。
通过PLC气缸控制,汽车生产线可以实现更高效、精确和可靠的底盘组装过程,从而提高生产效率和产品质量。
基于STC单片机的电机变频控制器设计

摘要电机变频控制器,是一种无机械运动的频率调控装置。
它把电力配电网50Hz恒定频率的交流电,变成可调频率的交流电,供普通的交流异步电动机使用。
对电机具有高效的驱动性能及良好的控制特性。
现在变频器在过程控制、提升控制、家电等中得到广泛的应用,而本设计主要是讨论其在家电中的使用。
在设计中采用STC12C5410AD作为主控制单片机实现电机变频控制器,使用智能功率模块( SPM)FPAL15SH60对电机进行驱动。
控制器能实现20--250Hz信号的输出,可通过手动或自动的方法调节频率,并能显示实时频率。
具有输入欠压保护、输出过压过流保护功能和过温监测等功能。
工作原理是由单片机产生初始的SPWM控制信号,把取样电压和设定的参考电压相比较得到输出电压与参考电压的误差值,电压误差值反馈到单片机内部进行数据处理,再由单片机对SPWM信号进行修正后输出,从而达到对电机控制。
本设计以高性能单片机为电机的控制中心,通过智能功率模块达到对电机的驱动,最终实现对电机的控制。
使其在实际使用中达到低功耗,高效率的效果。
关键字:变频器;STC单片机;智能功率模块( SPM );SPWMBased on STC-MCU Inverter Controller DesignStudent:CHEN Xiao-lan Teacher: LU Er-qingAbstract: Motor inverter controller is a motion-control device that non-mechanical frequency.Its electricity distribution network to a constant frequency AC 50HZ into AC adjustable frequency for the use of ordinary AC asynchronous motor.It’s drive with efficient performance and good control characteristics for motor.Inverter has been widely used in the process control, enhance control, and home electrical appliances, but mainly to discuss the design of its use in household appliances.In the design used STC12C5410AD single-chip as the main control variable frequency motor controller, and use of smart Power Module (SPM) FPAL15SH60 of the motor drive. Controller to achieve 30 - 150Hz output signal ,it can be manually or automatically adjust the frequency of the method , and displaying frequency value in real time. Including Including input under-voltage protection, output overvoltage and overcurrent protection features such as over-temperature monitoring.T he working principle is generated from the initial single-chip SPWM control signals, the sampling voltage and set the reference voltage to be compared with the reference voltage output voltage of the error, voltage error feedback to the internal single-chip data processing, and then SPWM signal from the micro to the revised output of motor control to achieve.The design for high-performance single-chip motor control center, through the smart power module for motor drive to achieve, and ultimately the control of motor. To achieve in practice the use of low-power, high-efficiency results.Keyword: Inverters;single-chip inverter; Smart Power Module (SPM);Sine Pulse-Width Modulation(SPWM)摘要 (I)ABSTRACT (II)1 引言 (1)1.1 变频器发展与主要成果 (2)1.2 变频器的现状与发展方向 (3)1.3 设计的意义与主要内容 (4)2 主要器件和开发环境 (6)2.1 主要器件介绍 (6)2.1.1 STC单片机 (6)2.1.2智能功率模块 (7)2.2 设计开发环境 (9)2.2.1硬件开发环境 (9)2.2.2软件开发环境 (10)3 硬件设计 (11)3.1 变频器的总体结构 (11)3.1.1 系统模块的划分 (11)3.1.2 电源模块 (12)3.2 变流功率模块 (12)3.3 变频控制模块 (14)3.3.1 SPWM的工作原理 (14)3.3.2 SPWM波形的生成方法 (15)3.3.3正弦脉宽调制模块 (16)3.4 其它控制接口 (18)3.4.1 A/D转换模块 (18)3.4.2 MCU与通信接口 (18)3.4.3 键盘模块 (19)3.4.4 显示模块 (19)4 系统软件设计 (21)4.1 SPWM参数的计算 (21)4.2 定时中断处理流程 (23)4.3 串行通信中断程序 (23)5 结论 (24)致谢 (25)参考文献 (26)附录一系统电原理图 (27)附录二实验程序 (28)1 引言随着人们生活水平的不断提高,家电在生活中的普及率越来越高,与此同时,人们对家电的要求也越来越高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本 文 以某垃 圾发 电厂 出渣 系统 中新 增气 缸 的实 际 控制 为例 。介 绍 了一 种 基 于 STC单 片机 为 控制 模 块 的气 缸控 制 系统 的软 、硬件 设计 及应 用 。
1 硬 件系统设计
该 工艺 系统 中气 缸 用来 实现 炉渣 推杆 装置 的 连 续 往返 运 动 ,因此 气 缸 控 制 方 式 相对 简单 。采用 双
控 二位 五通 电磁 阀作 为 气缸 气 路 控 制 阀 ,其 两 侧 电 磁 阀就 可 控 制 气 缸 两 端 的压 缩 空 气 充 气 回 路 ¨J。 气 缸行 程检 测用 的接 近 开关 有 NPN型 和 PNP型两 种 型式 [2],这 里选 用 直 流两 线 制 接 近 开关 作 为气 缸
两 端 的行程 检测 。为 了调节气 缸 活塞 的往 返行 进速 度 ,从 电磁 阀 至气 缸两 端 的软 连 接 气 管 路 上 分 别设 置 了一 个手 动气 体 流 量 调 节 阀 ,来 分 别 独 立 调 节 进 入 活 塞两 端气 缸 的压 缩 空 气 充 灌 速 度 ,实 现 调节 活 塞 往 返运行 速 度 的 目的 。
摘 要 :为实现 电厂 内新增气缸元件 的就地 控制 ,设计 出一种基 于 STC单 片机 的气 缸控制 弃 物 焚 烧 处 理 工 程 系统 。该系统 以接 近开关 作为传感器 ,采用单 片机控制的继 电器和双 控二位 五通 电磁 阀组成硬 设 计 及 工 业 节 能 环 件控制 系统 ,通过下降沿检测程 序读 取气缸 行程 两端传感 器 的位置信 号作 为单 片机 输入信 号 , 保产 品的研发 工作 。 以单片机 I/O端 输出高 、低 电平 直接 驱动继 电器开关 状态 。实 现气缸 活塞 运动位 置的实 时检测
0 引 言
气 缸 作 为 常用 的工 业 驱 动元 件 ,具 有 安 装 维 护 方 便 、对使 用环 境要 求 不高 、可输 出较 大 的驱动 力 等 优 点 .因此 广 泛 应 用 于 工 业 生 产 不 同 工 艺 系 统 中 。 由于 发 电厂 几 乎 全 部采 用 DCS集 散 控 制 系统 和模 块化 硬件 设备 ,因此 在 上 述 工艺 系统 中使 用 的气 缸 运行 控制 均 由厂 内 DCS系 统 统 一 管 理 和 控 制 。如 电厂排渣输送系统、输煤系统等远离 DCS整体控制 的现 场再 增加 气 缸元 件 .则 需要 重 新 敷 设 控 制 电缆 及增 加硬 件 连接 控 制 端 ,实施 起 来 比较 麻 烦 。 因此 如果 能够 通 过增设 简 单 的独立 控制 系统 来 实现对 个 别新 增气 缸 的现 场使 用控 制 要 求 ,不仅 安 装 使 用 方 便 ,而且 还 可 以节 约 其它 配件 的购 买费 用 。
图 2 单 片 机 控 制 原 理 不 意 图
2 软件驱 动设计 气 缸控 制模 块 核 心 为 STC89C52单 片 机 ,该 单
和方 向切换 :实际测试结果表 明 :该控制 系统能够 完全满 足对 新增气 缸元件 的就 地运行 控制要
求 ,为气缸独立控制 系统 的设计 及进一步研究提供参考 。
关 键 词 :STC单 片 机 ;气 缸 ;控 :TK223.7
文 献 标 识 码 :B
现 场 只需 把 压缩 空气 总管 及连 接气 缸 两端 用 的 两 条软 管接 人气 阀的 进 出 口快 速 接 头 ,然后 再 把 气 缸 两端 检测 气缸 行程 用 的接近 开关 分别 与单 片 机两 个 输入 端相 连 ,即可 完成 硬件 安装 工作 (如 图 1)。
收 稿 日期 :2017.09—20
. 节 能与 改造 ·
基于 STC单 片机 的气 缸控 制系 统设 计与应 用
57
图 1 气 缸 与 控 制 阀 连 接 图
图 2表示气 缸 控制 系统 压缩 空气 管路 连接 方式 和 电气控 制 接 线 方 式 。单 片 机 输 出 端 上 的 K1、K2 两个 5A继 电器 分 别 控制 二 位 五 通 电磁 阀 两 端 的 + 24V电磁 阀 YV1和 YV2的启 闭状态 ;气缸 两端 两个 磁 敏开关 分别 与单 片 机输入 SKI、SK2输 入端 相连 。
56
工 业 锅 炉
2018年 第 1期 (总第 167期 )
文章编号 :1004-8774(2018)01—0056-04 DOI:10.16558/j.cnki.issnl004.8774.2018.01.012
基于 STC单 片机 的气缸 控制 系统 设 计 与应 用
马 长 永 (北京 中科 通 用能 源环保 有 限责 任公 司 ,北京 100036)
Design and Application of Cylinder Control System
Based on STC M icrocontroller
作 者 简 介 :马 长 永
M A Chang—yong
(1977一),男 ,蒙 古
(Beijing China Science General Energy& Environment Co.,Ltd.,Beijing 100036) 族 ,高级 工 程 师 ,学 士 ,主要 从 事固 体废