Arduino以太网模块W5100测试
W5100模块手册

温馨提示本用户手册由《泥人通信模块开发平台》开发团队编写与审核,本手册仅适用于由泥人团队开发的NiRen_W5100模块。
本手册将持续更新于泥人的博客,请各位用户持续关注,同时泥人团队将努力开发出更多适合电子开发人员、在校同学们学习的通信模块。
让我们共同努力,迎接物联网时代的到来!!目录一、泥人W5100以太网模块简介 (1)二、模块排针功能表 (1)三、W5100芯片资源介绍 (2)四、电脑调试软件安装 (3)五、调试方法 (5)1、NiRen_W5100模块接线方法 (5)2、W5100客户端模式 (5)3、W5100服务端模式 (10)4、W5100UDP模式 (13)一、泥人W5100以太网模块简介NiRen_W5100模块是一款基于WIZnet W5100芯片的以太网模块,模块集成硬件化TCP/IP 协议;支持10/100Mbps 的传输速率;支持4个独立端口同时运行;同时模块还支持3.3V 或5V 电源供电,5V 供电时还可以输出3.3V 电源,方便用户在不同的单片机系统中使用;模块与单片机系统的通讯方式是简单、方便的SPI 通信。
以下是NiRen_W5100以太网模块的简单介绍:二、模块排针功能表排针标识功能说明排针标识功能说明3.3V 3.3V 电源输入引脚5V 5V 电源输入引脚MISO SPI 主机输入从机输出引脚GND 电源地引脚MOSI SPI 主机输出从机输入引脚RST W5200硬件初始化引脚(低电平有效)SCS SPI SLAVE 选择引脚(低电平有效)INT W5200中断引脚(低电平有效)SCLKSPI 时钟引脚NC保留、悬空1117_3.3V 电源稳压芯片10uF/16V电源滤波钽电容带网络变压器、带通讯指示LED 的RJ45型网口25MHz 的无源晶体振荡器泥人电子LOGOLED 电源指示灯W5100以太网芯片模拟电源滤高频干扰电感5V/3.3V 电源、SPI 通信片选、时钟、数据输入、数据输出、中断输出、复位输入排针预留两个安装孔,供以后用三、W5100芯片资源介绍W5100是一种款多功能的单片网络接口芯片,内部集成有10/100以太网控制器,主要应用于高集成、高稳定、高性能和低成本的嵌入式系统中。
基于ESP8266、Arduino+w5100的红外感应蜂鸣报警详解

将文件夹下的 init.lua 和 hongwai.lua,修改路由器信息和设备信息后,写 入 ESP8266 报警端代码位于: bigiotArduino/examples/W5100/fengming 将文件夹下 fengming.ino,修改设备信息后,写入 Arduino 开发板。 六、验证 查看监测端和报警端是否同时在线,如果不在线,检查代码和接线。 遮挡人体红外检测模块查看蜂鸣器和 LED 灯是否有变化。
Arduino uno R3 ×1 Ethernet W5100 ×1 蜂鸣器 ×1 LED 灯 ×1 电阻 10K ×3 ESP8266-07(12、12E) 人体红外感应模块 Usb 转 ttl 模块(用四、接线 1、A 地监测设备 esp8266 接线图 人体红外感应模块 VCC----5V GND----GND OUT----GPIO14
2、B 地报警设备 Arduino uno R3 与 Ethernet W5100 上下插接 五、代码修改写入 本站所有公开代码托管于 GitHub,方便大家使用和共同参与完善,地址: https://github/bigiot 进入以上链接,依次点击 bigiotArduino -》 Download ZIP 下载。 下载代码后解压。 A 地监测端 ESP8266(NodeMCU 固件)代码位于: bigiotArduino/examples/ESP8266/NodeMCU/hongwai
基于 ESP8266、Arduino+w5100 的红外感应蜂鸣报
警详解
一、使用场景 异地设备间通过互联网进行通讯,如 A 地红外感应监测是否有人进入监 控范围,通过贝壳物联平台通知 B 地蜂鸣报警器进行报警。 二、实现原理 A 地人体红外感应模块监测到有人进入监控范围产生高电平,告知已连接 贝壳物联平台的 esp8266(NodeMCU 固件),发送信息至 B 地的 Arduino+W5100,B 地设备接收的有人进入监控范围信息后,控制蜂鸣器蜂 鸣和 LED 灯亮。 三、所需硬件 异地设备间物联通讯
单片网络接口芯片W5100的原理与应用

单片网络接口芯片W5100的原理与应用
王计元
【期刊名称】《上海电力学院学报》
【年(卷),期】2011(027)002
【摘要】W5100是WIZnet公司推出的一款TCP/IP硬件协议栈的升级产品,是一种多功能的单片网络接口芯片.它除了集成TCP/IP协议栈外,还集成以太网MAC 层和物理层.介绍了W5100芯片的性能特点和内部结构,分析了其软硬件应用设计方法.
【总页数】7页(P153-159)
【作者】王计元
【作者单位】上海电力学院计算机与信息工程学院,上海,200090
【正文语种】中文
【中图分类】TN915.04
【相关文献】
1.基于SPI总线和W5100的医疗仪器网络接口设计 [J], 刘关德;余学飞
2.单片射频收发芯片TRF6901的原理与应用 [J], 霍修坤
3.单片专用PABX芯片SC11390的原理与应用 [J], 马宗龙;吕亚林
4.基于W5100芯片的网络通信电路设计 [J], 王勇;孙立功;张立文;李娜;刘博;孙孟方
5.74HC595芯片对单片机IO口的扩展原理与应用 [J], 杨恒敏
因版权原因,仅展示原文概要,查看原文内容请购买。
W5100HB系列串口现场测试小工具使用说明
W5100HB系列现场测试小工具使用
说明
一、软件说明
该软件用于模拟监测平台软件,实现以下功能:
1、接收数采仪的串口输出数据(国标212协议),便于数据的查看和导出
2、发送反控指令,实现对数采仪的反控操作
二、软件安装
双击setup.exe,进行安装
点击下一步,
选择您的安装路径,点击下一步
安装完成,点击关闭退出安装程序
三、软件使用
1、将电脑的串口与数采仪的串口(数据上报口)用串口直连线相连
2、双击桌面快捷方式,运行已经安装完毕的串口测试工具
3、软件基本设置
对串口进行设置,在串口名下拉框中选择您使用的PC机串口,将波特率设置为9600
点击打开串口,指示灯由红色变为绿色,说明PC机已经与数采仪建立连接,原始数据列表中显示数采仪的上报的原始数据,实时数据2011、分钟数据2051、小时数据2061、日数据2031会实时解析更新数采仪上报的数据。
4、数据导出功能
分钟、小时、日数据具有数据导出功能,点击导出按钮。
注意,
导出数据时应该关闭串口的情况下才能正常导出。
选择您要存储的路径和文件名,数据文件将以office Excel文本的格式存储
5、反控指令
在反控指令下拉框中,共有8条反控指令,其中取实时数据、提取现场时间、设置现场时间、提取实时间隔四条指令,选中相应指令后直接点击下发指令即可;
设置实施间隔指令应在间隔时间框中输入间隔时间,然后点击下发指令即可;
提取历史分钟数据、提取历史小时数据、提取历史日数据三条指令,在选中相应指令后,选取起始时间和结束时间,然后点击下发指
令即可。
W5100 在嵌入式系统中实现

W5100在嵌入式系统中实现TCP/IP网络通信的应用成都加联科技有限公司 黎明摘要:W5100是WIZnet公司最新推出的固件网络芯片,它是在W3150A+的基础上,集成了以太网物理层RTL8201CP核,因此W5100集TCP/IP协议栈、以太网MAC和PHY为一体。
W5100支持TCP,UDP,ICMP,IGMP,IPv4,ARP,PPPoE,Ethernet等网络协议;支持4个独立的Socket通信,内部16K字节的发送/接收缓冲区可快速进行数据交换,最大通信速率达到25Mbps;提供多种总线(两种并行总线和SPI总线)接口方式,可以很方便地与各种单片机连接。
关键词: W5100,TCP/IP协议,以太网,单片机引言我们原来介绍过W3150A网络芯片,由于W3150A使用时还必需要在外面接一个以太网物理层接口器件(RTL8201CP),增加了使用时的硬件难度,因此Wiznet公司最新推出了W5100,将TCP/IP协议栈、以太网的MAC和PHY三种功能集为一体。
W5100不仅保留了原来与MCU接口的并行总线接口,还增加了SPI串行总线接口。
W5100器件的推出,大大简化了硬件电路设计,使单片机系统在没有操作系统的支持下,真正实现了单芯片接入Internet的理想。
芯片介绍W5100有如下特性:与MCU多种接口选择,直接总线接口、间接总线接口和SPI总线;支持硬件TCP/IP协议:TCP, UDP, ICMP, IGMP, IPv4, ARP, PPPoE, Ethernet;支持ADSL连接(支持PPPOE协议,带PAP/CHAP验证);支持4个独立的端口(Sockets)连接;内部16K字节存储器作TX/RX缓存;内嵌10BaseT/100BaseTX以太网物理层,支持自动应答(全双工/半双工模式);支持自动极性变换(MDI/MDIX);多种指示灯输出(Tx,Rx,Full/Duplex,Collision,Link,Speed);0.18µm CMOS工艺;3.3V工作电压,I/O口可承受5V电压;LQFP80无铅封装,符合环保要求。
用arduino和yeelink--5分钟内完成远程家电控制

程序中需要改的地方是: 1.APIKEY: 这个需要更换成你自己账号的 APIKEY 2.DEVICEID :这个需要换成设备号 3.SENSORID:这个需要换成传感器号
OK,就这些了,5 分钟内学会如何做家庭电器控制,你行的!
另外,需要注意一点,下文中的 ethernet shield 是需要你家中的路由器开启 DHCP 功能的,如果没有开启,可以参考将 1. 代码中添加 byte ip[] = { 192, 168, 1, 12 }; (根据网络环境更改) 2. 将 Ethernet.begin(mac) 替换成 Ethernet.begin(mac, ip);
首先,照例我们要先申请到 yeelink 的 API-KEY 才可以进行:
如何免费获取 API-KEY,和如何添加设备,请移步 快速入门 来开始吧。
第一步: 注册之后,增加一个开关类的传感器
第二步,获取这次插入的控制设备的设备号和传感器号:如下图来说,就是设备号=63,传感器号=57
第三步,好了,控制按钮安装完毕,下面,将第七个 PIN 和 GND 之间连上电阻和 LED 灯,下载下面的 arduino 程序,更改三 个地方,就可以通过点击网页上的按钮,进行控制了。(居然这么简单???是的,就是这么简单...下面想想你能怎么玩更爽吧) arduino 程序中需要修改的地方有
硬件要求:比较贵,这次再介绍一款 SPI 通信方式的低成本小板,ENC28J60,参加下图模 块的模样和与 arduino 的连接方式进行连接,并且从这个链接获取 ENC 的网络函数驱动库并安装即可:
/forum.php?mod=attachment&aid=NDc1M3w4OTExYjg1M3wxMzM5MzM4Mzk1fDgwN3wyMD A%3D
W5100在单片机实现以太网通信中的应用

硬件接口结构框图。通过片选信号/CS 选中 (RTR)、重试次数寄存器 (RCR)、接收数据
W5100 芯片,通过直接总线模式,读 (/WR)、 缓冲区大小寄存器 (RMSR)、发送数据缓冲
图 1 W5100 功能框图
写 (/RD) 信号和数据 (DATA)、地址 (AD- 区大小寄存器 (TMSR) 以及套接字寄存器控
STC89C52 单片机 (MCU) 和 W5100 相结合的 接。由此可见,该模式下硬件电路的设计相对 制寄存器平均分为 4 部分,对 (下转 15 页)
-76-
科技论坛
时隙被浪费掉。
3.1 当多个标签进入阅读器范围的时候,阅 立连接,完成数据通信,但若此时信道状态为忙
2.4 动态帧时隙算法
读器首先发言,向所有标签发送唤醒命令,标签 碌,标签将再次进入随机延时状态。
力系统的测量监控、音视频传输、远程信息传
输等领域。
嵌入式网络控制系统,应用程序由 MCU 来执 简单,形式类似于 MCU 芯片外扩 RAM,只是
1 硬件设计
行 , 而 网 络 协 议 的 处 理 与 数 据 的 传 输 则 由 增加了中断控制线。
W5100 是韩国 WIZnet 公司生产的以太网 W5100 来实现。在进行系统设计时不必考虑
环中的帧的时隙个数 N,一个帧内的时隙的数 读器范围内),则阅读器与此标签建立连接,完 的实现[J].单片机与嵌入式系统应用,2006(5):
目 N 能随阅读区域中的标签的数目而动态改 成一次信息传送,成功传送信息后,阅读器发送 33-35.
变,或通过增加时隙数以减少帧中的冲突数目, 灭活指令,使该标签进入休眠状态;如果发生冲 [2]陈香,张思东,薛小平.防碰撞技术研究[J].应
一种基于单片机和W5100组合实现以太网通信中的应用分析

一种基于单片机和W5100组合实现以太网通信中的应用分析摘要:随着国家网络信息技术的发展,嵌入式系统通信技术的应用受到广泛重视,很多技术人员在实际工作中会利用IP协议的方式,将其作为基础制定完善的网络解决方案,通过远程控制方式,对数据通信进行全面的处理。
对于以太网而言,其具有成本低、集成容易等特点,可以全面提高系统的运行水平,因此,应当利用单片机和W5100组合方式对其进行处理,保证自身系统的运行质量,全面提高其工作可靠性与有效性。
关键词:单片机和W5100组合;以太网通信;应用措施在使用单片机与IP协议硬解码网络的过程中,应当科学使用接口芯片W5100对其进行处理,主要因为其是现代化内部硬件协议芯片,可以减少接口工作量,提高系统运行稳定性与可靠性,利用远程数据通信技术,完成安全检测工作、电力系统测量监控工作、音视频传输工作等。
一、硬件设计工作分析W5100是利用以太网接入方式的新型芯片,与传统的W3100芯片相较,具有一定的集成特点,可以将以太物理内核结合在一起,可以达到集成目的,提高系统的稳定性与可靠性。
在W5100中,主要包括:IP网络协议、UDP网络协议、ARP网络协议、SHCP网络协议等,同时,还包含DLG以太网协议与MAC以太网协议。
其可以为其提供丰富的总线,其中包括:并行类型的总线,就是直接或是间接的总线接口,在一定程度上,可以与SPI相互串行。
在芯片中含有16KB的数据缓冲双扣RAM,可以更好的对数据进行交换处理,建立自动化的识别传输模式,发挥全双工与半双工的优势,兼容100M的以太网。
对于W5100芯片而言,其中含有四个组成部分:其一为MCU接口部分,其二为网络协议引擎部分,其三为DPRAM部分,其四为以太网物理层接口部分。
在系统运行的过程中,具有多元化的功能与优势,可以全面体现相关功能,提升芯片的使用成效。
在使用W5100芯片的过程中,应当全面考虑以太网控制方面的问题,对简单端口进行编程处理,利用外部存储器开展相关访问工作。
W5100使用手册

W5100使用手册一、 板子尺寸尺寸单位毫米,插针间距2.54毫米。
二、 接线说明3V3--------------3.3伏GND-------------接地RST---------------P1_1SCS---------------P1_0SCLK-------------P1_2MISO-------------P1_3MOSI-------------P1_4以上是51单片机程序接线。
三、 模块的测试接好线后,打开提供的“TCP服务端”程序,修改网络参数设置,让模块的IP设置在你在连接的网络的范围内,程序默认的,网关是192.168.0.1,根据实际修改。
Gateway_IP数组是网关设置,Sub_Mask数组是子码掩网设置,数组Phy_Addr是模块物理地址设置,同一局域网内不能有相同的物理地址。
IP_Addr数组是模块的IP设置,S0_Port数组是端口设置,程序设置默认是5000,S0_DIP数组是目标IP地址设置,在模块工作在UDP或TCP客户端里才用到,S0_DPort数组是目标连接端口设置,在模块工作在UDP或TCP客户端才用到。
修改好上面的参数好,把程序下载到单片机,连接好线,上电后,正常状态,黄灯常亮,绿灯不规则闪烁。
模块跟电脑直接连接采用的是交叉网线,模块跟路由器或交换机,采用的是直通网线。
对于这两个网线的区别,用户自己找资料。
看到以上灯的正常闪烁后,打开WINDOWS的命令窗口,PING模块的地址,下面是连接正常的界面。
打开提供的网络调试助手工具,设置界面如下点击连接,成功后界面如下TCP服务端程序例程提供的测试程序,向模块发送数据,模块会把收到的数据返回给发送方。
程序开始处的Rx_Buffer跟Tx_Buffer数组分别表示发送跟接收到的缓冲数组,一次发送的数据不能超过数组的长度,用户根据需要自己修改。
例如发送1234567890界面如下。
W5100使用经验

关于W5100的一些调试经验:
●UDP接收时会硬件自动封装远端主机的IP和端口号和数据长度总共8字节做成一个帧头储存到输入buff里,而TCP则没有这种功能
●使用不同的网络调试助手可能会观察到不同的结果,有时并不是W5100的问题,而是网络调试助手的问题
●注意W5100在服务器模式下是不能设置远端IP和port的●W5100在输入模式下,虽然默认输入缓冲是2k,但实际上只有1460字节(默认分片长度,你可以设置),当输入的数据超过1460字节时,W5100触发一个接收中断并重新覆盖那1460个字节;当输入的数据少于1460字节时,W5100同样会触发一个接收中断;这种中断类似于STM32的串口空闲中断,也就是检测输入缓存是否空闲,一闲了就中断.
●W5100发热很严重
●W5100工作在TCP模式下时,不要一开始就设为client或server模式,因为这样很可能导致W5100错误地以为已经连接上了,而实际上根本没连接,这应该是w5100的一个bug
应该在之后的while大循环里检测连接,而且检测要有一定时间间隔!像这样
还有一个要注意的,如上图,调用W5100_Socket_Connect(0);以后还得延迟一下才能发送数据!另外,如果是在UDP模式下,UDP主机应该每隔一定时间就往外发一个心跳报文(UDP是无连接的,两个机子并不知道彼此连上没有),UDP从机在收到心跳包文后有利于建立连接
附:W5100的中断函数。
w5100学习笔记

/* 设置重试时间,默认为2000(200ms) */
Write_W5100(W5100_RTR,0x07);
Write_W5100(W5100_RTR+1,0xd0);
Write_W5100(W5100_SUBR+i,Sub_Mask[i]); /*SUB_MASK为4字节unsigned char数组,自己定义*/
/*设置物理地址,6字节,用于唯一标识网络设备的物理地址值
该地址值需要到IEEE申请,按照OUI的规定,前3个字节为厂商代码,后三个字节为产品序号
w5100初始化程序:
Write_W5100(W5100_MODE,MODE_RST); /*软复位W5100*/
Delay(100); /*延时100ms,自己定义该函数*/
/*设置网关(Gateway)的IP地址,4字节 */
/*使用网关可以使通信突破子网的局限,通过网关可以访问到其它子网或进入Internet*/
前几天从淘宝买了个w5100模块,学习了一下。这个芯片真的不错,集成了硬件tcp/ip协议栈。操作很简单,主要是通过spi接口(当然也支持并口总线操作)配置网络的相关ip 掩码 物理地址 之类的值。
参数配置好后,就是读写通讯的内容,w5100有个中断引脚来指示通讯的完成,我们通过在中断到来之后读取状态值,就会知道是那个端口的中断,以此来进行相关数据解析。
Write_W5100(W5100_IMR,(IMR_CONFLICT|IMR_UNREACH|IMR_S0_INT|IMR_S1_INT|IMR_S2_INT|IMR_S3_INT));
基于W5100以太网接入设备的设计

D『 A7 1 A
.0Leabharlann ●i _ 图1 以太网接 入设备框 图
i
壁 9 需号煮品 幂 3 时
2 1. w we p . rc 00 w . wC n a 5 e O.
责任编辑 :韩汝水
De i n I a sg de s
图3 间 接 总 线 接 口 另 一 侧 则 接 J R 4  ̄ 太 网插 座 ,用 于 如 图4 示 。 2 JS 所 以太 网 接入 。
硬件设计
由微 处 理 器 ( P 2 l ) 固 件 网络 芯 L c 24 、
的端 口(o k t编程 。主要应 用于高 S c e)
T O X N、 R I和 R I 等 四根 信 号 线 直 XP X N 接 连 接 到 以 太 网 变 量 器 上 ,变 量 器 的
以 太 网 接 人 设 备 硬 件 电 路 主 要 集 成 、 高 稳 定 、 高 性 能 和 低 成 本 的 嵌
所 至 日常 生 活 的 每个 角 落 ,如 使 用 电脑 其 原 理 框 冈 如 图 1 示 。 U
(AP ,需要 的外 围器件 较 少 ,非 常 I )
适 合 低 成 本 的 应 用场 合 。 W5 0 与 微 处 理 器 之 间支 持 直 接 10 总 线 、 间 接 总 线 * S I 线 接 三 种 接 UP总 口方式 。
》 I × 王 - D P 0 T
微 处 理 器
( PC 2214 L
TN _9 X _ 0 -
A DR ] . 】 R D [4 0 XP P
以人 阎 件
× 4R×DO ADDR【 : - 1 1 0] 4
● 一旨
一网友的作品:Arduino驱动NOKIA5110,超声波测距------2

一网友的作品:Arduino驱动NOKIA5110,超声波测距------25110模块简单易用,虽然没有内置字库,但是显示的速度加快了,而且只需要5个数字端口,对于arduino这种端口资源比较少的板子非常适合做一些互动项目今天加入了中文,图形显示函数//************************************************************* */// nokia 5110 arduino驱动程序(中文,图形显示。
超声波测距)// 程序设计:kent// 版本1.1// *************************// 2010.6//************************************************************* *///端口定义int lcd_ce=2;int lcd_rst=3;int sclk=4;int sdin=5;int lcd_dc=6;int inputpin=8; // 定义超声波信号接收接口int outputpin=9; // 定义超声波信号发出接口/****************************************************************/void setup(){pinmode(inputpin, input);pinmode(outputpin, output);}//************************************************************* **********//unsigned char boy_bmp[]={/*-- 调入了一幅图像:c:\documents and settings\administrator\桌面\boy2.bmp --*//*-- 宽度x高度=24x24 --*/0xff,0x01,0x81,0xc1,0xf1,0xf9,0xf9,0xfd,0xff,0xff,0xff,0xff,0xff, 0xff,0xff,0xff,0xff,0xfd,0xf9,0xf1,0xe1,0x81,0x01,0xff,0xff,0x00,0x1f,0x7f,0xf f,0x3f,0x27,0x27,0x27,0x27,0x3f,0x17,0x3f,0x27,0x27,0x27,0x27,0x3f,0xff,0x3f, 0x1f,0x0f,0x00,0xff,0xff,0xf0,0xfc,0xfc,0xfe,0xff,0xfe,0xfc,0xec,0xf8,0xfa,0x5a,0xfa ,0xf8,0xec,0xfc,0xfe,0xff,0xfe,0xfe,0xfc,0xf8,0xf0,0xff,};//**************************调入中文字符字模数据******************************//const unsigned char hzk[][24]={//深{0x08,0xf1,0x1a,0x40,0x56,0xca,0x46,0xf2,0xc6,0x4a,0x56,0x 00,0x01,0x07,0x00,0x02,0x01,0x00,0x00,0x07,0x00,0x01,0x02,0x0 0,},//入{0x00,0x00,0x00,0xc1,0x31,0x0e,0x30,0xc0,0x00,0x00,0x00,0 x00,0x04,0x02,0x01,0x00,0x00,0x00,0x00,0x00,0x01,0x02,0x04,0x 00,},//互{0x02,0x02,0x82,0xfe,0x8a,0x8a,0x8a,0xfa,0x02,0x03,0x02,0x 00,0x04,0x04,0x04,0x04,0x04,0x04,0x04,0x07,0x04,0x04,0x04,0x0 0,},//动{0x92,0x52,0x32,0x52,0x92,0x10,0x08,0xff,0x08,0x08,0xf8,0x 00,0x03,0x01,0x01,0x01,0x05,0x02,0x01,0x04,0x04,0x06,0x01,0x0 0,},//科{0x8a,0x6a,0xfe,0x29,0x49,0x80,0x92,0xa4,0x80,0xff,0x40,0x0 0,0x01,0x00,0x07,0x00,0x00,0x00,0x00,0x00,0x00,0x07,0x00,0x00 ,},//技{0x44,0x44,0xff,0x24,0x00,0x64,0xa4,0x3f,0xa4,0x64,0x04,0x0 0,0x04,0x04,0x07,0x00,0x04,0x04,0x02,0x01,0x02,0x04,0x04,0x00 ,},};//****************************定义ascii字符**********************///**********************************6 x 8 font1 pixel space at left and bottomindex = ascii - 32***********************************/const unsigned char font6x8[][6] ={{ 0x00, 0x00, 0x00, 0x00, 0x00, 0x00 }, // sp { 0x00, 0x00, 0x00, 0x2f, 0x00, 0x00 }, // ! { 0x00, 0x00, 0x07, 0x00, 0x07, 0x00 }, // " { 0x00, 0x14, 0x7f, 0x14, 0x7f, 0x14 }, // # { 0x00, 0x24, 0x2a, 0x7f, 0x2a, 0x12 }, // $ { 0x00, 0x62, 0x64, 0x08, 0x13, 0x23 }, // % { 0x00, 0x36, 0x49, 0x55, 0x22, 0x50 }, // & { 0x00, 0x00, 0x05, 0x03, 0x00, 0x00 }, // ' { 0x00, 0x00, 0x1c, 0x22, 0x41, 0x00 }, // ( { 0x00, 0x00, 0x41, 0x22, 0x1c, 0x00 }, // ) { 0x00, 0x14, 0x08, 0x3e, 0x08, 0x14 }, // * { 0x00, 0x08, 0x08, 0x3e, 0x08, 0x08 }, // + { 0x00, 0x00, 0x00, 0xa0, 0x60, 0x00 }, // , { 0x00, 0x08, 0x08, 0x08, 0x08, 0x08 }, // - { 0x00, 0x00, 0x60, 0x60, 0x00, 0x00 }, // . { 0x00, 0x20, 0x10, 0x08, 0x04, 0x02 }, // / { 0x00, 0x3e, 0x51, 0x49, 0x45, 0x3e }, // 0 { 0x00, 0x00, 0x42, 0x7f, 0x40, 0x00 }, // 1 { 0x00, 0x42, 0x61, 0x51, 0x49, 0x46 }, // 2 { 0x00, 0x21, 0x41, 0x45, 0x4b, 0x31 }, // 3 { 0x00, 0x18, 0x14, 0x12, 0x7f, 0x10 }, // 4 { 0x00, 0x27, 0x45, 0x45, 0x45, 0x39 }, // 5 { 0x00, 0x3c, 0x4a, 0x49, 0x49, 0x30 }, // 6 { 0x00, 0x01, 0x71, 0x09, 0x05, 0x03 }, // 7{ 0x00, 0x06, 0x49, 0x49, 0x29, 0x1e }, // 9 { 0x00, 0x00, 0x36, 0x36, 0x00, 0x00 }, // : { 0x00, 0x00, 0x56, 0x36, 0x00, 0x00 }, // ; { 0x00, 0x08, 0x14, 0x22, 0x41, 0x00 }, // < { 0x00, 0x14, 0x14, 0x14, 0x14, 0x14 }, // = { 0x00, 0x00, 0x41, 0x22, 0x14, 0x08 }, // > { 0x00, 0x02, 0x01, 0x51, 0x09, 0x06 }, // ? { 0x00, 0x32, 0x49, 0x59, 0x51, 0x3e }, // @ { 0x00, 0x7c, 0x12, 0x11, 0x12, 0x7c }, // a { 0x00, 0x7f, 0x49, 0x49, 0x49, 0x36 }, // b { 0x00, 0x3e, 0x41, 0x41, 0x41, 0x22 }, // c { 0x00, 0x7f, 0x41, 0x41, 0x22, 0x1c }, // d { 0x00, 0x7f, 0x49, 0x49, 0x49, 0x41 }, // e { 0x00, 0x7f, 0x09, 0x09, 0x09, 0x01 }, // f { 0x00, 0x3e, 0x41, 0x49, 0x49, 0x7a }, // g { 0x00, 0x7f, 0x08, 0x08, 0x08, 0x7f }, // h { 0x00, 0x00, 0x41, 0x7f, 0x41, 0x00 }, // i { 0x00, 0x20, 0x40, 0x41, 0x3f, 0x01 }, // j { 0x00, 0x7f, 0x08, 0x14, 0x22, 0x41 }, // k { 0x00, 0x7f, 0x40, 0x40, 0x40, 0x40 }, // l { 0x00, 0x7f, 0x02, 0x0c, 0x02, 0x7f }, // m { 0x00, 0x7f, 0x04, 0x08, 0x10, 0x7f }, // n { 0x00, 0x3e, 0x41, 0x41, 0x41, 0x3e }, // o { 0x00, 0x7f, 0x09, 0x09, 0x09, 0x06 }, // p { 0x00, 0x3e, 0x41, 0x51, 0x21, 0x5e }, // q { 0x00, 0x7f, 0x09, 0x19, 0x29, 0x46 }, // r { 0x00, 0x46, 0x49, 0x49, 0x49, 0x31 }, // s { 0x00, 0x01, 0x01, 0x7f, 0x01, 0x01 }, // t { 0x00, 0x3f, 0x40, 0x40, 0x40, 0x3f }, // u{ 0x00, 0x3f, 0x40, 0x38, 0x40, 0x3f }, // w { 0x00, 0x63, 0x14, 0x08, 0x14, 0x63 }, // x { 0x00, 0x07, 0x08, 0x70, 0x08, 0x07 }, // y { 0x00, 0x61, 0x51, 0x49, 0x45, 0x43 }, // z { 0x00, 0x00, 0x7f, 0x41, 0x41, 0x00 }, // [ { 0x00, 0x55, 0x2a, 0x55, 0x2a, 0x55 }, // 55 { 0x00, 0x00, 0x41, 0x41, 0x7f, 0x00 }, // ] { 0x00, 0x04, 0x02, 0x01, 0x02, 0x04 }, // ^ { 0x00, 0x40, 0x40, 0x40, 0x40, 0x40 }, // _ { 0x00, 0x00, 0x01, 0x02, 0x04, 0x00 }, // ' { 0x00, 0x20, 0x54, 0x54, 0x54, 0x78 }, // a { 0x00, 0x7f, 0x48, 0x44, 0x44, 0x38 }, // b { 0x00, 0x38, 0x44, 0x44, 0x44, 0x20 }, // c { 0x00, 0x38, 0x44, 0x44, 0x48, 0x7f }, // d { 0x00, 0x38, 0x54, 0x54, 0x54, 0x18 }, // e { 0x00, 0x08, 0x7e, 0x09, 0x01, 0x02 }, // f { 0x00, 0x18, 0xa4, 0xa4, 0xa4, 0x7c }, // g { 0x00, 0x7f, 0x08, 0x04, 0x04, 0x78 }, // h { 0x00, 0x00, 0x44, 0x7d, 0x40, 0x00 }, // i { 0x00, 0x40, 0x80, 0x84, 0x7d, 0x00 }, // j { 0x00, 0x7f, 0x10, 0x28, 0x44, 0x00 }, // k { 0x00, 0x00, 0x41, 0x7f, 0x40, 0x00 }, // l { 0x00, 0x7c, 0x04, 0x18, 0x04, 0x78 }, // m { 0x00, 0x7c, 0x08, 0x04, 0x04, 0x78 }, // n { 0x00, 0x38, 0x44, 0x44, 0x44, 0x38 }, // o { 0x00, 0xfc, 0x24, 0x24, 0x24, 0x18 }, // p { 0x00, 0x18, 0x24, 0x24, 0x18, 0xfc }, // q { 0x00, 0x7c, 0x08, 0x04, 0x04, 0x08 }, // r { 0x00, 0x48, 0x54, 0x54, 0x54, 0x20 }, // s{ 0x00, 0x3c, 0x40, 0x40, 0x20, 0x7c }, // u{ 0x00, 0x1c, 0x20, 0x40, 0x20, 0x1c }, // v{ 0x00, 0x3c, 0x40, 0x30, 0x40, 0x3c }, // w{ 0x00, 0x44, 0x28, 0x10, 0x28, 0x44 }, // x{ 0x00, 0x1c, 0xa0, 0xa0, 0xa0, 0x7c }, // y{ 0x00, 0x44, 0x64, 0x54, 0x4c, 0x44 }, // z{ 0x14, 0x14, 0x14, 0x14, 0x14, 0x14 } // horiz lines};/************************lcd初始化函数********************************/void lcd_init(void){//先设置为输出pinmode(sclk,output);pinmode(sdin,output);pinmode(lcd_dc,output);pinmode(lcd_ce,output);pinmode(lcd_rst,output);// 产生一个让lcd复位的低电平脉冲digitalwrite( lcd_rst, low);delaymicroseconds(1);digitalwrite( lcd_rst, high);// 关闭lcddigitalwrite( lcd_ce, low);delaymicroseconds(1);// 使能lcddigitalwrite( lcd_ce, high); //lcd_ce = 1;delaymicroseconds(1);lcd_write_byte(0x21, 0); // 使用扩展命令设置lcd模式lcd_write_byte(0xc8, 0); // 设置偏置电压lcd_write_byte(0x06, 0); // 温度校正lcd_write_byte(0x13, 0); // 1:48lcd_write_byte(0x20, 0); // 使用基本命令lcd_clear(); // 清屏lcd_write_byte(0x0c, 0); // 设定显示模式,正常显示// 关闭lcddigitalwrite( lcd_ce, low); //lcd_ce = 0;}/************************lcd清屏函数*******************************/void lcd_clear(void){unsigned int i;lcd_write_byte(0x0c, 0);lcd_write_byte(0x80, 0);for (i=0; i<504; i++){lcd_write_byte(0, 1);}}/*************************设置字符位置函数**************************/void lcd_set_xy(unsigned char x, unsigned char y){lcd_write_byte(0x40 | y, 0);// columnlcd_write_byte(0x80 | x, 0);// row}/*************************ascii字符显示函数*************************/void lcd_write_char(unsigned char c){unsigned char line;c -= 32;for (line=0; line<6; line++){lcd_write_byte(font6x8[c][line], 1);}}/************************************************************** *****//*-------------------------------------------------lcd_write_english_string : 英文字符串显示函数输入参数:*s :英文字符串指针;x、y : 显示字符串的位置,x 0-83 ,y 0-5--------------------------------------------------*/void lcd_write_english_string(unsigned char x,unsigned char y,char *s){lcd_set_xy(x,y);while (*s){lcd_write_char(*s);s++;}}/************************************************************** ****//*---------------------------------------------lcd_write_byte : 写数据到lcd输入参数:data :写入的数据;command :写数据/命令选择;---------------------------------------------*/void lcd_write_byte(unsigned char dat, unsigned char command){unsigned char i;digitalwrite( lcd_ce, low); // 使能lcd_ce = 0if (command == 0){digitalwrite( lcd_dc, low);// 传送命令 lcd_dc = 0;}else{digitalwrite( lcd_dc, high);// 传送数据lcd_dc = 1;}for(i=0;i<8;i++){if(dat&0x80){digitalwrite( sdin, high);//sdin = 1;}else{digitalwrite( sdin, low);//sdin = 0;}digitalwrite( sclk, low);//sclk = 0;dat = dat << 1;digitalwrite( sclk, high);//sclk = 1;}digitalwrite( lcd_ce, high);//lcd_ce = 1;}/************************************************************** //*-------------------------------------------------lcd_write_chinese_string: 在lcd上显示汉字输入参数:x、y :显示汉字的起始x、y坐标;ch_with :汉字点阵的宽度num :显示汉字的个数;line :汉字点阵数组中的起始行数row :汉字显示的行间距--------------------------------------------------*/void lcd_write_chinese_string(unsigned char x, unsigned char y,unsigned char ch_with,unsigned char num,unsigned char line,unsigned char row){unsigned char i,n;lcd_set_xy(x,y); //设置初始位置for (i=0;i<num;){for (n=0; n<ch_with*2; n++) //写一个汉字if (n==ch_with) //写汉字的下半部分{if (i==0) lcd_set_xy(x,y+1);else{lcd_set_xy((x+(ch_with+row)*i),y+1);}}lcd_write_byte(hzk[line+i][n],1);}i++;lcd_set_xy((x+(ch_with+row)*i),y);}}/***********************************************//*----------------------------------------------lcd_draw_map : 位图绘制函数输入参数:x、y :位图绘制的起始x、y坐标;*map :位图点阵数据;pix_x :位图像素(长)pix_y :位图像素(宽)-----------------------------------------------*/void lcd_draw_bmp_pixel(unsigned char x,unsigned char y,unsigned char *map,unsigned char pix_x,unsigned char pix_y){unsigned int i,n;unsigned char row;if (pix_y%8==0)row=pix_y/8; //计算位图所占行数}else{row=pix_y/8+1;}for (n=0;n<row;n++){lcd_set_xy(x,y);for(i=0; i<pix_x; i++){lcd_write_byte(map[i+n*pix_x], 1);}y++; //换行}}/*************************以下为主函数*****************************/void loop(){lcd_init();//初始化液晶lcd_clear();//清屏lcd_draw_bmp_pixel(30,0,boy_bmp,24,24); //调入上面的图像lcd_write_english_string(4,2,"----"); //写入ascii字符lcd_write_english_string(55,2,"----");lcd_write_chinese_string(6,3,12,6,0,0); //写入中文字符lcd_write_english_string(20,5,"arduino");delay(5000);lcd_clear(); //清屏lcd_write_english_string(0,0," --arduino-- ");lcd_write_english_string(0,2,"renge:");lcd_write_english_string(0,4,"design by kent");lcd_write_english_string(0,5," 2010.6 ");//以下进入超声波测距while(1){digitalwrite(outputpin, low); // 使发出发出超声波信号接口低电平2μsdelaymicroseconds(2);digitalwrite(outputpin, high); // 使发出发出超声波信号接口高电平10μs,这里是至少10μsdelaymicroseconds(10);digitalwrite(outputpin, low); // 保持发出超声波信号接口低电平int distance = pulsein(inputpin, high); // 读出脉冲时间distance= distance/58; // 将脉冲时间转化为距离(单位:厘米)if(distance>120) //如果距离大于120cm{lcd_write_english_string(35,2,""); //在(35, 2)坐标上显示“”}else{lcd_write_english_string(60,2,"cm"); //如果小于120cmlcd_set_xy(35, 2); //在(35, 2)坐标上显示测出数值lcd_write_char( 0x30+distance%1000/100); //显示百位数lcd_write_char( 0x30+distance%100/10); //显示十位数lcd_write_char( 0x30+distance%10); //显示个位数}}}。
W5100学习之功能描述

W5100学习之功能描述
W5 1 0 0芯片的推出,大大简化了硬件电路设计,使单片机系统在没有操作系统支持下,真正使单芯片接人I n t e r ac t成为现实。
W5100在以往的网络接口芯片基础上,将T C P/ I P协议栈、以太网MA C和P H Y集成在一块芯片上,大大简化了硬件设计难度。
而且通过内部嵌入硬件协议栈,省去了传统繁琐的以太网协议编写和调试步骤,加快了系统开发速度,因此该芯片应用前景良好。
1.功能描述
通过设置寄存器和存储器,W5100就可以进行Internet连接。
这一章叙述操作过程。
1.1初始化
n 基本设置
对于1100的操作需要设置以下寄存器的参数:。
Arduino以太网模块W5100测试

Arduino W5100 测试1.将你的W5100扩展板插在Arduino板上,确保所有的引脚接触良好。
尺寸: 长-69MM 宽-53.6MM2.下载测试程序。
arduino w5100 测试程序代码:/************************************************/#include <SPI.h>/** Web Server** A simple web server that shows the value of the analog input pins. */#include <Ethernet.h>byte mac[] = { 0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED };byte ip[] = { 192, 168, 0, 15 };EthernetServer server(80);void setup(){Ethernet.begin(mac, ip);server.begin();}void loop(){EthernetClient client = server.available();if (client) {// an http request ends with a blank lineboolean current_line_is_blank = true;while (client.connected()) {if (client.available()) {char c = client.read();// if we've gotten to the end of the line (received a newline// character) and the line is blank, the http request has ended, // so we can send a replyif (c == 'n' && current_line_is_blank) {// send a standard http response headerclient.println("HTTP/1.1 200 OK");client.println("Content-Type: text/html");client.println();// output the value of each analog input pinclient.print("welcome to tinyos electronics");client.println("<br />");client.print("//*************************************");client.println("<br />");client.print("");client.println("<br />");client.print("//*************************************");client.println("<br />");for (int i = 0; i < 6; i++) {client.print("analog input ");client.print(i);client.print(" is ");client.print(analogRead(i));client.println("<br />");}break;}if (c == 'n') {// we're starting a new linecurrent_line_is_blank = true;} else if (c != 'r') {// we've gotten a character on the current linecurrent_line_is_blank = false;}}}client.stop();}}/************************************************/3.用网线连接您的W5100板和PC(如果你直接连接PC和W5100你可能需要一根交叉网线)4. 设置你的电脑本地ip地址5.你将看见电脑的本地连接已连接并且W5100上以下4个LED灯会点亮。
固态网络芯片W5100
Wiznet发布固件网络芯片W5100,支持PPPoE协议
Wiznet公司于日前开幕的第十二届国际集成电路研讨会暨展览会(IIC China 2007)深圳站的展会上,展出了其新近推出的固件网络协议芯片W5100。
W5100是其早些时候的W3150A的升级版本,它在W3150A的基础上增加了一个以太网PHY,利用逻辑硬件实现,使系统设计更加简单,紧凑。
目前,很多嵌入式网络芯片是直接通过软件实现的,但是由于网络协议都比较大,写入软件后稳定性欠佳,而且客户时常会有新的需求,这种用软件实现的方式就很难满足频繁更新升级的要求。
因此,一种方式就是将网络协议的处理独立于系统处理器之外,让应用程序与资料的输入/输出分别执行于不同的硬件,来适应多方面的条件。
它将网络协议的处理分成一个由特定处理器执行的控制部分和一个硬件线路部分。
这种方式的优点是具有较短的开发周期与较高的弹性,而其主要的成本则来自于处理器本身的授权费。
Wiznet一级代理商成都加联科技有限公司的刘国辉介绍说:“W5100将10/100Mbps以太网MAC和PHY集成到自动MDIX,具有16KB数据缓冲区,线路传输率可达25Mbps。
此外,它最大的特点是除了支持TCP,ARP,ICMP等硬件协议栈外,还支持PPPoE协议,不需要经过电脑就能直接接入ADSL,实现数据通信。
W5100可以用于要求高通信速率的地方,如机顶盒,数字录像机,以太网络,远程控制等。
”
据了解,目前国内应用还不太多,主要是用于办公室局域网,国外则应用较普遍,多用于机顶盒。
W5100现已开始量产。
ArduinoEtherneV2.5ZduinoEtherneV2.5
ArduinoEtherneV2.5ZduinoEtherneV2.5Zduino Ethernet(Arduino Ethernet兼容控制器)V2.5 使⽤⼿册⼀、Zduino Ethernet概述Zduino Ethernet是基于Arduino Ethernet的微控制器板,我们在官⽅原作基础上,集成了USB下载、POE供电、TF插槽等功能,并且完全兼容UNO引脚位置。
使⽤它,你可以快速的将你的控制器接⼊互联⽹从⽽搭建你的⽹络应⽤。
板载以W5100为核⼼的⽹络模块,可以使Arduino成为简单的Web服务器或者通过⽹络控制读写Arduino的数字和模拟接⼝等⽹络应⽤。
可直接使⽤IDE中的Ethernet库⽂件便可实现⼀个简单Web服务器。
同时⽀持MicroSD卡(TF卡)读写,功能强悍。
⼆、技术规格名称性能说明处理器A Tmega328p⼯作电压5V输⼊电压(推荐)7~12V 最⾼可到40V输⼊POE模块电压(推荐)7~30V 需⽀持48V,参见“⾼级进阶”数字I/O脚14个其中3、5、6、9、10、11号端⼝可⽤于PWM输出;10、11、12、13号端⼝⽤于SPI通信;4号端⼝⽤于TF卡⽚选;10号端⼝为W5100⽚选;2号端⼝可通过短接电路板背⾯的INT 空焊盘,启⽤中断功能(参见“⾼级进阶”)。
模拟输⼊脚6个每个I/O直流输出能⼒40 mA 整个处理器⼯作电流不得超过200mA 3.3V直流输出能⼒50 mAFlash Memory 32 KB 其中0.5 KB ⽤于bootloaderSRAM 2 KBEEPROM 1 KB⼯作时钟16 MHz其他TCP/IP Ethernet控制器W5100⽀持Power Over Ethernet供电输⼊MicroSD卡(TF卡)座MicroUSB下载说明⽀持Micro SD卡读/写;Ethernet和MicroSD卡共⽤SPI⼝,通过4、10号端⼝分时复⽤。
单片网络接口芯片W5100的原理与应用
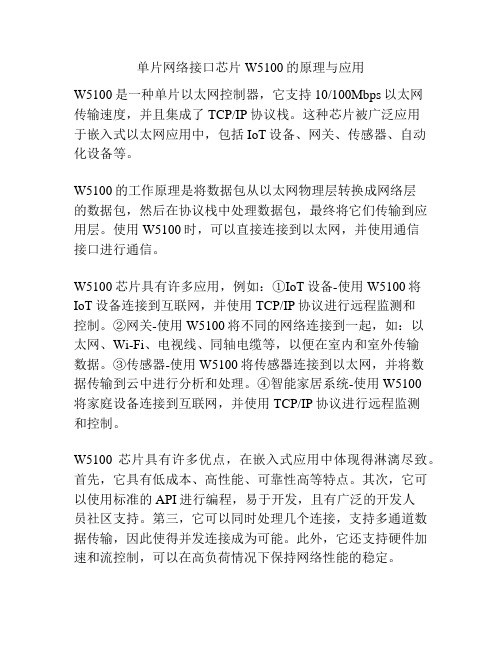
单片网络接口芯片W5100的原理与应用W5100是一种单片以太网控制器,它支持10/100Mbps以太网传输速度,并且集成了TCP/IP协议栈。
这种芯片被广泛应用于嵌入式以太网应用中,包括IoT设备、网关、传感器、自动化设备等。
W5100的工作原理是将数据包从以太网物理层转换成网络层的数据包,然后在协议栈中处理数据包,最终将它们传输到应用层。
使用W5100时,可以直接连接到以太网,并使用通信接口进行通信。
W5100芯片具有许多应用,例如:①IoT设备-使用W5100将IoT设备连接到互联网,并使用TCP/IP协议进行远程监测和控制。
②网关-使用W5100将不同的网络连接到一起,如:以太网、Wi-Fi、电视线、同轴电缆等,以便在室内和室外传输数据。
③传感器-使用W5100将传感器连接到以太网,并将数据传输到云中进行分析和处理。
④智能家居系统-使用W5100将家庭设备连接到互联网,并使用TCP/IP协议进行远程监测和控制。
W5100芯片具有许多优点,在嵌入式应用中体现得淋漓尽致。
首先,它具有低成本、高性能、可靠性高等特点。
其次,它可以使用标准的API进行编程,易于开发,且有广泛的开发人员社区支持。
第三,它可以同时处理几个连接,支持多通道数据传输,因此使得并发连接成为可能。
此外,它还支持硬件加速和流控制,可以在高负荷情况下保持网络性能的稳定。
总体来说,W5100芯片是嵌入式以太网应用的理想选择。
其高性能、低成本、易于使用和广泛的应用范围使得它在IoT、直播、视频会议和其他嵌入式应用中得到了广泛的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Arduino W5100 测试1.将你的W5100扩展板插在Arduino板上,确保所有的引脚接触良好。
尺寸: 长-69MM 宽-53.6MM
2.下载测试程序。
arduino w5100 测试程序代码:
/************************************************/
#include <SPI.h>
/*
* Web Server
*
* A simple web server that shows the value of the analog input pins. */
#include <Ethernet.h>
byte mac[] = { 0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED };
byte ip[] = { 192, 168, 0, 15 };
EthernetServer server(80);
void setup()
{
Ethernet.begin(mac, ip);
server.begin();
}
void loop()
{
EthernetClient client = server.available();
if (client) {
// an http request ends with a blank line
boolean current_line_is_blank = true;
while (client.connected()) {
if (client.available()) {
char c = client.read();
// if we've gotten to the end of the line (received a newline
// character) and the line is blank, the http request has ended, // so we can send a reply
if (c == 'n' && current_line_is_blank) {
// send a standard http response header
client.println("HTTP/1.1 200 OK");
client.println("Content-Type: text/html");
client.println();
// output the value of each analog input pin
client.print("welcome to tinyos electronics");
client.println("<br />");
client.print("//*************************************");
client.println("<br />");
client.print("");
client.println("<br />");
client.print("//*************************************");
client.println("<br />");
for (int i = 0; i < 6; i++) {
client.print("analog input ");
client.print(i);
client.print(" is ");
client.print(analogRead(i));
client.println("<br />");
}
break;
}
if (c == 'n') {
// we're starting a new line
current_line_is_blank = true;
} else if (c != 'r') {
// we've gotten a character on the current line
current_line_is_blank = false;
}
}
}
client.stop();
}
}
/************************************************/
3.用网线连接您的W5100板和PC(如果你直接连接PC和W5100你可能需要一根交叉网线)
4. 设置你的电脑本地ip地址
5.你将看见电脑的本地连接已连接并且W5100上以下4个LED灯会点亮。
FULLD,100M,LINK,PWR
如果没有请按W5100 扩展板上的复位键(Reset)。
5.现在你可以使用PING命令测试W5100
6.访问http://192.168.0.15/你可以看到网站的测试页。