2_OpenSplice_DDS_Use_Cases
OpenSplice_DDS介绍

OpenSplice DDS产品介绍1概述在大型网络中心系统中,信息的实时交换最为关键。
从多个源产生的信息必须由信息制造者按QoS 要求将信息请求者感兴趣的信息进行分发。
特别是在实时和关键性任务系统中,“在正确的时间和地点获取正确的数据”是非常关键的任务。
OMG认识到数据分发服务(DDS)的需求,并组织在网络、信息管理、分布式、实时和关键性任务系统方面具有丰富经验的会员(包括Thalse Naval Netherlands)定义了“OMG-DDS”服务。
OMG-DDS服务规定了一个从小型嵌入式控制系统到大型企业信息管理系统域范围内实时信息有效性的一致的描述集。
为了实现“在正确的时间和地点获取正确的数据”,每一个DDS描述都为定义DDS提供的服务级别增加了明晰的能力:(1)Minimum Profile:基础的描述,使用众所周知的“发布/订阅(publish/subscribe)”范例在共享“主题(topics)”的多个发布者和订阅者之间进行高效信息传播。
主题是基础的数据结构,由OMG的IDL语言描述。
这个描述也包括了可以使中间件“匹配”请求和提供的QoS参数(如“reliability”、“ordering”或“urgency”)的QoS框架。
(2)Ownership Profile:这个“重复”描述通过允许每一个发布者表示“strength”的方式,为相同信息的发布者提供支持,这样只有“highest-strength”信息可用于感兴趣的成员。
(3)Content Subscription Profile:这个“内容意识”描述具有对感兴趣的细节信息内容(内容过滤)提供精细表示的强大特性,也允许应用指定视图映射和数据集合,允许利用SQL语言的一个子集动态查询订阅的“topics”,同时保留了信息访问请求的实时性。
(4)Persistence Profile:这个“持久”描述对“非易失”数据提供了透明的和容错的可用性,“非易失”数据也许表现为固定不变“设置”(在分布式系统中存储在海量介质中),或在短暂发布者范围外以一个容错方式保持的“状态”(允许应用的后期加入或动态的再分配)。
chatglm2推理代码详解
chatglm2推理代码详解chatglm2是一个用于推理的Python库,它基于聊天记录数据,可以进行情感分析、主题分类和实体识别等任务。
本文将详细介绍chatglm2的推理代码。
首先,我们需要安装chatglm2库。
可以使用pip命令进行安装:```pip install chatglm2```安装完成后,我们可以导入chatglm2库:```pythonimport chatglm2```接下来,我们需要加载训练好的模型。
chatglm2提供了一个函数load_model,可以加载预训练的模型。
我们需要指定模型的路径:```pythonmodel_path = "path/to/model"model = chatglm2.load_model(model_path)```加载模型后,我们可以使用模型进行推理。
首先,我们需要准备输入数据。
chatglm2的输入数据是一个包含聊天记录的列表,每个聊天记录是一个字符串。
例如:```pythonchat = ["用户1:你好,我想咨询一下关于产品的信息。
","客服:您好,请问有什么问题我可以帮您解答?","用户1:我想知道这个产品的价格和功能。
","客服:这个产品的价格是100元,主要功能是xxx。
","用户1:好的,谢谢!"]```接下来,我们可以使用模型进行推理。
chatglm2提供了一个函数infer,可以对输入数据进行推理。
我们需要指定输入数据和模型:```pythonresult = chatglm2.infer(chat, model)```推理完成后,我们可以获取推理结果。
chatglm2的推理结果是一个字典,包含了情感分析、主题分类和实体识别的结果。
例如:sentiment = result["sentiment"]topic = result["topic"]entities = result["entities"]```情感分析的结果是一个字符串,表示聊天记录的情感倾向。
openSCAD_CN_user_manual
数都是用于生成最基础的零件,组件,模块,而第二部分是根据第一部分的基础模型基础上加以编辑, 功能强大,且不容易理解。所以我在翻译的时候,就调整了顺序。
这样的顺序,我感觉容易理解,内容上没有修改。
打开一个或者多个模型是从 OpenSCAD 的 File->open (快捷键 Ctrl+O)就可以打开一个文件管理窗口, 选择目标文件即可,也可以在终端中直接输入命令打开, openscad /home/user/xxx/example004.scad 命令是 openscad, 文件加上文件的路径,或者在当前路径可直
8 基础的立体模型 8.1 cube 方形 8.2 sphere 球形 8.3 cylinder 圆柱形 8.4 polyhedron 多面体
9 转变(类似 librecad 的编辑功能) 9.1 scale 比例 9.2 resize 改变大小 9.3 rotate 旋转 9.4 translate 调动(改变位置) 9.5 mirror 镜像 9.6 multmatrix 多点矩阵分布 9.7 color 颜色 9.8 minkowski 闵可夫斯基, 9.9 hull 去壳
你在期望的你非常感兴趣的在电脑动画电影。
OpenSCAD 不是一个交互建模。相反,它是在脚本文件中描述对象,并呈现从脚本文件中的 3D 模型,上
面写着像一个三维的解释。这给了你(设计师)的建模过程的完全控制权,使您可以轻松地更改任何步 骤在建模过程中,甚至设计所定义的配置参数
OpenSCAD 包括两个主要的建模技术:首先,建设性的立体几何(CSG),第二,二维轮廓映射。 AutoCAD DXF(qcad,librecad)文件作 为数据交换格式的二维轮廓。除了 2D 路径输出,但也可以从 DXF 文件读取设计参数。除了读取 DXF 文件,OpenSCAD 还可以读取和创建三维模型的 STL 和 OFF 文件
学生成绩管理系统软件架构课程设计
淮海工学院计算机工程学院《大型软件系统构造》大作业名称:学生成绩管理系统的设计专业班级:软件122班*名:**系(院):计算机工程学院时间: 2015.4.8~~2015.6.8目录第一章需求分析1 引言 (2)1.1 项目背景 (2)1.2 系统目标 (2)1.3 范围+Feature+上下文图 (2)1.4 用例图 (3)1.5 用例规约 (3)2 需求 (4)2.1 功能需求 (4)2.2 性能需求 (5)2.3 约束需求 (5)第二章领域建模1 类图 (5)2 状态图 (7)3 可扩展性 (8)第三章关键需求1 确定关键质量 (9)2 确定关键需求 (9)3 具体关键需求分析 (10)第四章概念架构设计1 系统架构模式 (11)2 鲁邦图 (11)第五章细化架构设计1 逻辑架构 (12)2 开发架构 (14)3 物理架构 (15)4 运行架构 (15)5 数据架构 (16)第六章架构验证1 关键组件 (17)2 交互方式 (18)3 架构验证结论 (19)第七章总结 (20)第一章需求分析1 引言1.1 项目背景每个学校都需要进行考试成绩的统计分析工作,而这些工作都必须在考试结束后尽快完成。
大量的成绩数据的统计工作如果只靠人工完成,费时费力,还容易出错。
使用计算机对学生成绩管理信息进行管理,具有手工管理所无法比拟的有点。
尤其是随着教学体制的不断改革,学分制、选课制的展开和深入,学生成绩日常管理工作及保存管理日趋繁重、复杂。
高校都迫切需要研制开发一款属于自己的功能强大,操作简单,具有人性化的学生成绩管理系统。
因此需要开发出一个满足学校进行成绩的录入、查询、修改和统计等需求的功能完善、安全可靠并且迅速便捷的成绩管理系统。
1.2 系统目标通过调查分析,开发出一个操作简便、界面友好、灵活实用、安全可靠的学生成绩管理系统是一个学校不可缺少的重要部分,它的内容对于学校的决策者和管理者来说都至关重要。
OpenPCS编程手册 附录(V5.2.2)

3.4 建立和下载 ..........................................................................................61
3.5 配置 ......................................................................................................62
2.3 COM_US_RD:获取接收缓冲区数据,每次读取一个字节............8
2.4 COM_US_WE:向发送缓冲区写一个字节的数据...........................9
2.5 COM_US_SD:发送缓冲区中的数据 ..............................................10
2.16 TRIG_CFG: 配置触发数据块 ........................................................22 2.17 TRIG:启动T_TYPE 触发数据块...................................................25 2.18 TRIG_ST: 得到触发数据块状态 ....................................................26 2.19 CLOCK_GET:得到系统时间 .........................................................27 2.20 CLOCK_SET:设置系统时间 ..........................................................28 2.21 EV_SEC_CFG:配置秒事件 ............................................................30 2.22 EV_TIME_CFG:时间事件参数配置..............................................30 2.23 EV_CALE_CFG:日历事件参数配置 .............................................32 2.24 EV_CLK_CFG:闹钟事件参数配置................................................33 2.25 EV_RTC_SET:使能实时时钟事件.................................................35 2.26 PID_CLOSE:关闭所有PID数据块.................................................35 2.27 PID_CLOSE_N:关闭相应数据块号的PID数据块 ........................36 2.28 PID_OPEN:PID参数寄存器地址设置 ...........................................36 2.29 PID_PARA_SET:设置PID参数 ......................................................38 2.30 PID_ST_SET:设置PID工作状态 ....................................................39 2.31 REG_R_UINT:从寄存器读无符号整数.........................................40 2.32 REG_W_UINT:写无符号整数到寄存器........................................41 2.33 REG_R_REAL:从寄存器读浮点数................................................42 2.34 REG_W_REAL:写浮点数到寄存器 ..............................................42 2.35 REG_R_UDINT: 读无符号长整数...................................................43 2.36 REG_W_UDINT:写无符号长整数.................................................44 2.37 REG_MOVE:寄存器数据块复制 ...................................................44 2.38 SYS_AD_GET:读出系统A/D某通道的平均值和工程值.................45 2.39 SYS_ERR_GET: 得到系统错误 .......................................................46 2.40 SYS_ERR_RST: 清除所有系统错误................................................47 2.41 REG_H_LOAD: 从FRAM载入参数值到寄存器..........................48 2.42 REG_H_SAVE: 从寄存器写参数值到FRAM .................................49
点云 分割 代码 -回复

点云分割代码-回复如何使用代码进行点云分割点云分割是计算机视觉和三维重建领域的重要任务之一。
它的目标是将点云数据集划分成不同的聚类群组,以便提取出有意义的物体或场景信息。
本文将介绍如何使用代码进行点云分割,并提供一种常见的分割算法实现。
我们将逐步解释每一个步骤,以帮助读者更好地理解。
第一步:数据加载与可视化开始之前,我们首先需要准备一组点云数据。
点云数据通常以文本文件的形式存储,每一行代表一个点的三维坐标信息。
在这里,我们将使用一个名为"point_cloud.txt"的文件作为示例数据。
为了加载和可视化数据,我们需要使用一些库函数和工具。
以下是一个使用Python及相关库函数的示例代码:pythonimport numpy as npimport matplotlib.pyplot as pltfrom mpl_toolkits.mplot3d import Axes3D# 从文件加载点云数据data = np.loadtxt("point_cloud.txt")# 可视化点云数据fig = plt.figure()ax = fig.add_subplot(111, projection='3d')ax.scatter(data[:, 0], data[:, 1], data[:, 2])plt.show()在上述代码中,我们首先导入了必要的库函数和工具。
然后,使用`np.loadtxt()`函数从文件中加载点云数据。
接下来,我们使用matplotlib 库函数将点云数据可视化为三维散点图。
最后,通过调用`plt.show()`函数显示图像。
第二步:数据预处理在进行点云分割之前,通常需要对数据进行一些预处理操作,以消除噪声、降低维度或者进行归一化等。
以下是一个简单的数据预处理示例代码:pythonfrom sklearn.preprocessing import StandardScaler# 数据预处理scaler = StandardScaler()data_scaled = scaler.fit_transform(data)# 可视化预处理后的点云数据fig = plt.figure()ax = fig.add_subplot(111, projection='3d')ax.scatter(data_scaled[:, 0], data_scaled[:, 1], data_scaled[:, 2])plt.show()在以上代码中,我们使用了`StandardScaler`类对数据进行了标准化处理。
opendds 编译

opendds 编译1.引言1.1 概述Opendds是一个开源的分布式数据中间件平台,用于实现实时系统之间的高效通信和数据交换。
它是基于DDS(Data Distribution Service)标准的实现,是一个功能强大且高度可扩展的工具。
本文旨在介绍如何编译Opendds,并提供一些常见问题的解决方法。
通过这篇文章,读者将能够了解Opendds编译的过程和一些相关的注意事项。
在本文的正文部分,我们将详细介绍Opendds编译的过程。
我们将从安装必要的依赖项开始,然后解释如何配置编译环境和执行编译命令。
我们还将介绍一些常见问题,如编译错误和依赖项冲突,并提供相应的解决方案。
在结论部分,我们将对Opendds编译的过程进行总结,并提出一些建议。
这些建议可以帮助读者更好地理解和应用Opendds,并解决可能在编译过程中遇到的问题。
通过阅读本文,读者将能够获得关于Opendds编译的全面指南,并且在编译过程中能够快速解决常见的问题。
无论是初学者还是有经验的开发人员,本文都将对他们有所帮助。
相信在阅读完本文后,读者能够更加熟悉和掌握Opendds编译的技巧和方法。
1.2 文章结构本文将介绍opendds编译的相关知识和技巧,主要分为以下几个部分:1. 引言:首先对opendds编译进行概述,介绍opendds的基本概念和用途。
同时,给出本文的结构和目的,帮助读者更好地理解和掌握opendds的编译过程和相关问题。
2. 正文:详细描述opendds编译的具体过程,包括所需的软件工具和环境配置、编译命令及其参数的使用方法等。
此外,还会针对opendds 编译过程中常见的问题进行分析和解决,提供一些实用的技巧和经验分享。
3. 结论:对opendds编译进行总结,回顾本文介绍的主要内容和要点。
同时,提供一些建议和建议,帮助读者更好地应对opendds编译的挑战,并提高编译效率和质量。
通过本文的阅读,读者将能够全面了解opendds编译的过程和相关技巧,能够顺利完成opendds的编译工作,并能够应对常见的编译问题和提高编译效率。
openbugs模板代码的使用

使用OpenBUGS进行概率编程模型的建模和分析是统计学和概率论领域中常用的方法之一。
OpenBUGS是一个开源的概率编程软件,它提供了一种灵活且高效的方式来建立统计模型并进行参数估计和推断。
OpenBUGS模板代码是使用OpenBUGS进行建模和分析的重要组成部分,它是一种描述统计模型结构、参数和数据关系的语言。
通过编写模板代码,用户可以定义模型中的参数、先验分布、似然函数以及所需的推断目标,从而完成复杂的统计分析任务。
在使用OpenBUGS模板代码时,我们按照从简到繁、由浅入深的方式来探讨其使用方法和相关概念。
我们需要了解OpenBUGS模板代码的基本语法和结构。
1.模板代码的基本结构:OpenBUGS模板代码由多个模块组成,每个模块对应一个参数或相关内容。
模块中包含了参数的定义、先验分布的设置以及推断目标的声明。
model {# 参数的定义和先验分布设置parameter ~ prior_distribution(parameters)# 似然函数的定义likelihood <- likelihood_function(parameters, data)# 推断目标的声明target += likelihood# 其他模型的定义# ...}2.参数和先验分布的设置:在模板代码中,我们需要定义参数的名称和它们的先验分布。
参数的名称在模型中的不同模块中需要保持一致,以确保正确的参数估计。
parameter ~ prior_distribution(parameters)在这里,parameter是参数的名称,prior_distribution是先验分布的设置,parameters是先验分布参数的值。
3.似然函数的定义:似然函数描述了参数和数据之间的关系,它量化了参数的可能性和数据的一致性。
likelihood <- likelihood_function(parameters, data)在这里,likelihood是似然函数的名称,likelihood_function是似然函数的定义,parameters是参数的值,data是数据。
keyedvectors用法

keyedvectors用法Keyedvectors是一种常用于文本分类和聚类的算法,它通过将文本数据转化为向量表示,以便进行高效的数据分析和处理。
以下是Keyedvectors的基本用法和常见操作:一、基本用法Keyedvectors可以用于各种文本分类和聚类任务,例如垃圾邮件检测、情感分析、主题建模等。
使用Keyedvectors需要安装相应的库,如gensim和nltk。
安装库:```shellpipinstallgensimnltk```加载预训练模型:```pythonfromgensim.modelsimportKeyedVectorsmodel=KeyedVectors.load_word2vec_format('path/to/pretrain ed/model',binary=True)```使用KeyedVectors对象进行文本表示:```pythontext="Thisisasampletext."#输入文本vector=model[text]#将文本表示为向量```二、常见操作1.获取向量表示:使用KeyedVectors对象可以获取文本的向量表示。
可以使用模型中的任何文本进行表示。
2.相似度比较:使用KeyedVectors对象可以计算两个文本之间的相似度。
可以使用余弦相似度或欧几里得距离等度量方法进行比较。
3.聚类分析:KeyedVectors可以用于文本聚类任务,将相似的文本分组在一起。
可以使用K-means、DBSCAN等聚类算法进行聚类分析。
4.词嵌入表示:KeyedVectors可以将单词表示为向量,这些向量可以用于各种自然语言处理任务,如情感分析、命名实体识别等。
5.更新模型:如果需要更新KeyedVectors模型,可以使用gensim库中的训练方法进行训练。
例如,可以使用负采样和迭代优化方法对大规模文本数据进行训练。
openpcdet nuscenes 预测格式

一、背景介绍openpcdet是一个开源的目标检测与跟踪工具,是基于点云数据进行3D目标检测的工具包。
而nuscenes是一个用于自动驾驶的开放数据库,包含了丰富的标记数据和传感器采集的场景信息。
在自动驾驶领域,准确地预测周围环境中的障碍物是至关重要的。
针对nuscenes 数据库设计的openpcdet nuscenes预测格式具有重要的意义。
二、openpcdet nuscenes预测格式介绍1. openpcdet nuscenes预测格式是指在nuscenes数据库中使用openpcdet工具进行目标检测的数据输出格式。
该格式通常包含以下信息:2. 目标类别:通常包括行人、车辆、自行车等不同的目标类别。
3. 目标位置:目标在3D空间中的位置坐标,通常以(x, y, z)的形式表示。
4. 目标尺寸:目标在3D空间中的长宽高尺寸,通常以(length, width, height)的形式表示。
5. 目标朝向:目标的朝向角度,通常以yaw角表示。
6. 目标置信度:系统对目标预测的置信度,通常为一个0到1之间的值。
三、在openpcdet中使用nuscenes数据库进行目标检测的步骤1. 数据准备:从nuscenes数据库中获取需要的场景数据,包括点云数据、相机图像、激光雷达数据等。
2. 数据预处理:对获取的数据进行预处理,包括点云数据的滤波、坐标变换、数据配准等操作。
3. 模型加载:在openpcdet中加载预训练好的目标检测模型,通常是基于深度学习的3D目标检测模型。
4. 目标检测:对预处理后的数据进行目标检测,获取目标的位置、尺寸、朝向等信息。
5. 结果输出:将目标检测的结果按照openpcdet nuscenes预测格式进行输出,以便后续的自动驾驶系统可以使用。
四、openpcdet nuscenes预测格式的优势1. 适用性广:openpcdet nuscenes预测格式适用于nuscenes数据库中的各种场景数据,包括城市道路、高速公路、乡村道路等不同环境下的目标检测。
sueprise的用法

sueprise的用法一、什么是Surprise?Surprise是一个用于Python机器学习的开源工具包。
它为使用者提供了一系列的机器学习模型和算法,能够快速便捷地进行各种任务,例如分类、回归、聚类和降维等。
Surprise旨在帮助用户简化机器学习模型的实现过程,并提升模型性能。
二、如何安装Surprise?要开始使用Surprise,首先需要在您的Python环境中安装该工具包。
下面是安装步骤:1. 打开终端或命令提示符窗口,并确保您已经安装了pip,这是Python包管理器。
2. 在命令行输入以下命令来安装Surprise:```pip install scikit-surprise```3. 等待安装完成后,您就可以开始使用Surprise了!三、Surprise的基本用法Surprise提供了简洁而强大的API,使得使用机器学习模型更加直观和高效。
下面介绍几个常见任务的基本用法:1. 数据加载使用Surprise进行机器学习任务之前,首先需要加载数据集。
你可以使用内置的数据集(如MovieLens)或者自己构建数据集。
以下是一个加载MovieLens数据集的示例:```pythonfrom surprise import Dataset# 加载MovieLens数据集data = Dataset.load_builtin('ml-100k')```2. 模型选择和训练Surprise支持多种机器学习模型,如基于邻域的方法、矩阵分解方法等。
下面是一个使用SVD算法进行推荐的示例:```pythonfrom surprise import SVD, accuracy, Trainset, Readerfrom surprise.model_selection import cross_validate# 定义模型algo = SVD()# 训练模型trainset = data.build_full_trainset()algo.fit(trainset)# 评估模型性能cv_results = cross_validate(algo, data, measures=['RMSE', 'MAE'], cv=5)# 打印结果print("Mean RMSE: ", cv_results['test_rmse'].mean())print("Mean MAE: ", cv_results['test_mae'].mean())3. 预测和推荐Surprise不仅可以进行预测,还能根据用户历史行为生成个性化推荐。
经验模态分解的python程序

经验模态分解的python程序经验模态分解(Empirical Mode Decomposition,EMD)是一种信号处理方法,它可以将信号分解成若干个本质模态函数(Intrinsic Mode Function,IMF)的线性组合。
以下是使用Python实现EMD的步骤:1. 安装必要的Python库:numpy和scipy```pythonpip install numpy scipy```2. 定义EMD的函数```pythonimport numpy as npfrom scipy.interpolate import UnivariateSplinedef emd(x):c = ximf = []while not is_mono(c):h = cwhile not is_imf(h):h = h - envelope(h)imf.append(h)c = c - himf.append(c)return imfdef is_mono(x):return np.all(x[:-1] >= x[1:]) or np.all(x[:-1] <= x[1:]) def is_imf(h):return is_mono(h) and (h[0] > 0 and h[-1] < 0 or h[0] < 0and h[-1] > 0)def envelope(x):max_env = compute_max_env(x)min_env = compute_max_env(-x)env = (max_env + min_env) / 2return envdef compute_max_env(x):max_env = []spline = UnivariateSpline(range(len(x)), x, s=0)for i in range(len(x)):max_env.append(spline(i))return np.array(max_env)```3. 输入信号并运行EMD函数```pythonx = # 输入信号imf = emd(x)# 绘制分解出的每个IMFimport matplotlib.pyplot as pltt = range(len(x))plt.figure(figsize=(10, 6))for i in range(len(imf)):plt.subplot(len(imf), 1, i+1)plt.plot(t, imf[i], 'r')plt.ylabel('IMF %d' %(i+1))plt.xlabel('t')plt.show()```以上是使用Python实现EMD的步骤,不得出现任何网址、超链接和电话。
torch indices用法

torch indices用法torch.indices()是PyTorch中的一个函数,用于生成由给定形状的网格矩阵中的所有索引的张量。
本文将详细介绍torch.indices()函数的用法以及其在深度学习中的应用。
1. 什么是torch.indices()函数?torch.indices()函数是PyTorch中的一个函数,它用于生成一个张量,其中包含了由给定形状的网格矩阵中的所有索引。
该函数接受一个形状参数,返回一个新的张量,其大小与给定形状参数相同,每个元素是一个包含相应位置索引的长整型张量。
2. torch.indices()函数的语法torch.indices(size, *, dtype=None, layout=torch.strided,device=None, requires_grad=False) -> Tensor参数说明:- size:一个表示生成张量形状的元组。
- dtype:返回张量的数据类型,默认为None。
- layout:返回张量的布局,默认为torch.strided。
- device:返回张量所在的设备,默认为None。
- requires_grad:表示返回的张量是否需要梯度,默认为False。
3. torch.indices()函数的用法示例下面是一个使用torch.indices()函数的简单示例,来生成一个2×3的网格矩阵所有索引的张量:import torchsize = (2, 3)indices = torch.indices(size)print(indices)输出结果为:tensor([[[0, 0, 0],[1, 1, 1]],[[0, 1, 2],[0, 1, 2]]])在上述示例中,输入参数size是一个形状为(2, 3)的元组,torch.indices()函数返回一个形状为(2, 3, 2)的张量,其中每个位置的索引被表示为一个长整型张量。
点云 曲面重建 python
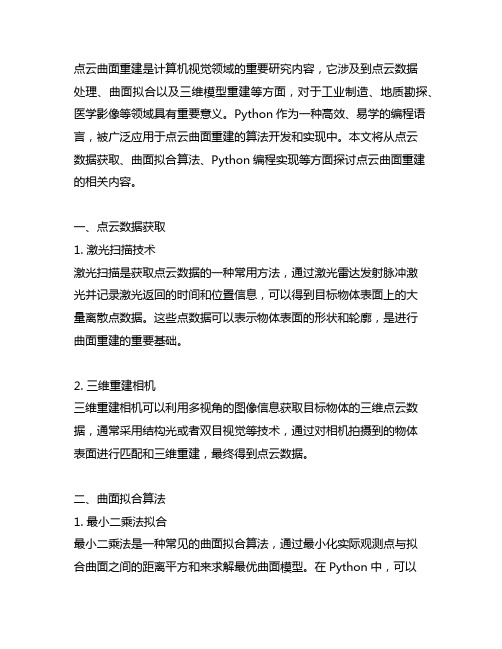
点云曲面重建是计算机视觉领域的重要研究内容,它涉及到点云数据处理、曲面拟合以及三维模型重建等方面,对于工业制造、地质勘探、医学影像等领域具有重要意义。
Python作为一种高效、易学的编程语言,被广泛应用于点云曲面重建的算法开发和实现中。
本文将从点云数据获取、曲面拟合算法、Python编程实现等方面探讨点云曲面重建的相关内容。
一、点云数据获取1. 激光扫描技术激光扫描是获取点云数据的一种常用方法,通过激光雷达发射脉冲激光并记录激光返回的时间和位置信息,可以得到目标物体表面上的大量离散点数据。
这些点数据可以表示物体表面的形状和轮廓,是进行曲面重建的重要基础。
2. 三维重建相机三维重建相机可以利用多视角的图像信息获取目标物体的三维点云数据,通常采用结构光或者双目视觉等技术,通过对相机拍摄到的物体表面进行匹配和三维重建,最终得到点云数据。
二、曲面拟合算法1. 最小二乘法拟合最小二乘法是一种常见的曲面拟合算法,通过最小化实际观测点与拟合曲面之间的距离平方和来求解最优曲面模型。
在Python中,可以使用numpy库进行最小二乘法曲面拟合的实现。
2. RANSAC算法RANSAC(Random Sample Consensus)算法是一种鲁棒的曲面拟合算法,它通过随机采样的方式来拟合曲面模型,能够有效应对数据中的噪声和异常值。
在Python中,可以利用scikit-learn库中的RANSACRegressor模块进行曲面拟合。
三、Python编程实现1. 点云数据处理在Python中,可以使用open3d库或者PointCloud库对点云数据进行处理,包括读取、可视化、滤波、配准等操作。
通过这些操作,可以准备好点云数据用于曲面重建的算法实现。
2. 曲面拟合算法实现在Python中,可以自己编写最小二乘法和RANSAC算法的实现代码,也可以利用开源的库和工具进行曲面拟合算法的实现。
通过调用相应的函数和模块,可以完成对点云数据的曲面拟合工作。
swin unet代码简单化 -回复

swin unet代码简单化-回复如何简化SWIN UNet代码简介:在计算机视觉领域中,语义分割是一项重要任务,它涉及将图像分割成不同的语义区域。
SWIN UNet是一种基于UNet架构的语义分割模型,其核心思想是将宽和深度视觉注意力机制引入UNet架构,以提高模型的性能。
本文将详细介绍如何简化SWIN UNet代码。
1. 导入必要的库和模块首先,我们需要导入一些必要的库和模块,例如PyTorch、OpenCV等。
在这一步中,我们可以使用`import`语句导入这些库和模块。
例如:pythonimport torchimport torch.nn as nnimport cv22. 定义SWIN UNet模型类接下来,我们需要定义一个SWIN UNet模型类。
这个类将继承自PyTorch 的`nn.Module`类,并包含必要的模型定义和方法。
在这一步中,我们可以使用`class`关键字定义这个类,并在其中定义模型的层和方法。
例如:pythonclass SwinUnet(nn.Module):def __init__(self):super(SwinUnet, self).__init__()# 定义模型的层def forward(self, x):# 定义模型的前向传播逻辑3. 定义模型的层在SWIN UNet模型中,我们需要定义一些特定的层,例如Swin Transformer层、Encoder层、Decoder层等。
在这一步中,我们可以使用`nn`模块定义这些层。
例如:pythonclass SwinUnet(nn.Module):def __init__(self):super(SwinUnet, self).__init__()self.swin_transformer = SwinTransformer()self.encoder = Encoder()self.decoder = Decoder()def forward(self, x):# 定义模型的前向传播逻辑4. 定义模型的前向传播逻辑在SWIN UNet模型中,前向传播逻辑是指输入数据经过模型的层,最终得到输出结果。
python基于ssd的模板匹配实例

一、概述在计算机视觉领域,模板匹配是一种常见的图像处理技术,用于在图像中寻找特定模式或对象的位置。
而基于SSD(Single Shot Multibox Detector)的模板匹配则是一种基于深度学习的模板匹配方法,它利用SSD模型对目标进行检测和定位。
本文将介绍如何使用Python语言实现基于SSD的模板匹配,并提供一个实际的应用示例。
二、模板匹配概述模板匹配是一种基本的计算机视觉任务,它的目标是在输入图像中寻找与给定模板最相似的区域。
常见的模板匹配方法包括均方差匹配、相关系数匹配等,但这些传统方法在复杂场景下表现并不理想。
三、 SSD模型简介SSD是一种用于目标检测的神经网络模型,它采用了多尺度特征图来检测不同大小的目标,具有较高的检测精度和较快的处理速度。
SSD模型可以同时进行目标类别识别和位置定位,适用于各种不同尺寸和比例的目标检测任务。
四、基于SSD的模板匹配流程1. 数据准备:准备待匹配的模板图像和输入图像。
2. 模型加载:使用Python中的深度学习框架(如TensorFlow、PyTorch等)加载预训练的SSD模型。
3. 特征提取:利用SSD模型从输入图像中提取多尺度的特征图。
4. 匹配计算:将模板图像与提取的特征图进行匹配计算,得到相似度得分。
5. 结果输出:根据得分选择匹配结果,并进行位置定位。
五、 Python实现基于SSD的模板匹配实例下面通过一个实际的应用示例来演示如何使用Python语言实现基于SSD的模板匹配。
1. 数据准备准备待匹配的模板图像和输入图像。
模板图像为待匹配的目标对象,输入图像为需进行匹配的图像。
2. 模型加载使用Python中的深度学习框架(如TensorFlow、PyTorch等)加载已经预训练好的SSD模型,可以直接从官方全球信息湾或开源社区获取。
3. 特征提取利用加载好的SSD模型从输入图像中提取多尺度的特征图,这些特征图将用于后续的匹配计算。
EPS脚本语言二次开发实现对地下管线数据的特定检查

本 、 除脚本 、 删 保存 脚本 和执 行脚 本等 功能 。 脚 本组织 文件 名为 S r t) 。脚本 代码 以 VB ci .【 p tt S 或 J S为 扩展 名 , 一存 储 在 E S程 序 执行 目录下 S 统 P
的 Sr t c p 目录 。 i 22 S P o es 象 . S r cs 对
极 大 地提 高 了数 据 检 查 工 作 的 效 率 。
关键词 :P E S脚 本 语 言 ; 下管 线 ; 理 信 息 系统 ; 序 开 发 地 地 程
1 引言
地 下管 线信 息是 城市 空间 基础地 理 信息 的重要 组 成部 分 . 其数据 成果 质量 将 直接影 响到 城市 规划 、
方便 快捷 实现 诸 多应用 。
21 E S脚 本语 言 的组织 . P
图 1中左侧 为脚 本的 目录树组织 . 包括 了已建的
脚本分 组和各组下 面的脚本 。 边为脚本 的执 行代码 右
区 , 直接进行编辑 修改 。每次编辑修 改后 , 击“ 可 点 保 存脚本 ” 则完成对相 应脚本 的编辑操作 。要执 行相应
S P o es eS l t o dt n 起点 号 ” k ” S rcs. tee C n io ”【 S c i le, i
” Y”
S P o es e eet o dt n 终 点号 ” k ” S rcs. t l C n io ”『 SS c i l e, i
” ” W
E d I n f g o o n3 g o o n l g o o n2 e c u t= e c u t+ e c u t I e c u t <l h n f g o o n 3 T e
经 分 析 湖 州 市地 下 雨 污 管 线 数 据 的 扩 展 属 性
有限元接触问题代码

有限元接触问题代码有限元接触问题是一个广泛研究的问题,涉及到不同材料之间的接触力学分析。
以下是一个简化的有限元接触问题的代码示例,以说明基本的实现思路。
假设有两个物体A和B,它们之间存在接触。
首先需要进行网格划分,将物体A和物体B分别划分为有限元网格。
然后,需要定义接触区域的初始条件和材料参数。
```pythonimport numpy as npimport matplotlib.pyplot as pltfrom scipy.sparse import lil_matrixfrom scipy.sparse.linalg import spsolve# 定义网格划分函数,将物体划分为有限元网格def generate_mesh():# 生成节点坐标数组nodes = np.array([[0, 0], [0, 1], [1, 0], [1, 1]])# 生成单元数组elements = np.array([[1, 2, 3], [2, 3, 4]])return nodes, elements# 定义初始条件和材料参数def define_parameters():# 定义材料参数young_modulus_a = 1young_modulus_b = 2poisson_ratio_a = 0.3poisson_ratio_b = 0.4# 定义接触区域初始条件contact_area = np.array([1, 2])return young_modulus_a, young_modulus_b, poisson_ratio_a, poisson_ratio_b, contact_area# 构建刚度矩阵和力向量def assemble_stiffness_matrix(nodes, elements, young_modulus_a, young_modulus_b, poisson_ratio_a, poisson_ratio_b):num_nodes = len(nodes)num_elements = len(elements)stiffness_matrix = lil_matrix((num_nodes, num_nodes))for i in range(num_elements):element = elements[i]node_indices = element - 1x_coords = nodes[node_indices, 0]y_coords = nodes[node_indices, 1]area = (x_coords[1] - x_coords[0]) * (y_coords[2] -y_coords[0])k = area / 2# 计算局部刚度矩阵local_stiffness_matrix_a = (young_modulus_a / (1 - poisson_ratio_a**2)) * np.array([[1, poisson_ratio_a, 0], [poisson_ratio_a, 1, 0], [0, 0, (1 - poisson_ratio_a) / 2]])local_stiffness_matrix_b = (young_modulus_b / (1 - poisson_ratio_b**2)) * np.array([[1, poisson_ratio_b, 0], [poisson_ratio_b, 1, 0], [0, 0, (1 - poisson_ratio_b) / 2]])# 计算全局刚度矩阵stiffness_matrix[node_indices[0], node_indices[0]] += k * local_stiffness_matrix_a[0, 0]stiffness_matrix[node_indices[0], node_indices[1]] += k * local_stiffness_matrix_a[0, 1]stiffness_matrix[node_indices[0], node_indices[2]] += k * local_stiffness_matrix_a[0, 2]stiffness_matrix[node_indices[1], node_indices[0]] += k * local_stiffness_matrix_a[1, 0]stiffness_matrix[node_indices[1], node_indices[1]] += k * local_stiffness_matrix_a[1, 1]stiffness_matrix[node_indices[1], node_indices[2]] += k * local_stiffness_matrix_a[1, 2]stiffness_matrix[node_indices[2], node_indices[0]] += k * local_stiffness_matrix_a[2, 0]stiffness_matrix[node_indices[2], node_indices[1]] += k * local_stiffness_matrix_a[2, 1]stiffness_matrix[node_indices[2], node_indices[2]] += k * local_stiffness_matrix_a[2, 2]stiffness_matrix[node_indices[0], node_indices[0]] += k * local_stiffness_matrix_b[0, 0]stiffness_matrix[node_indices[0], node_indices[1]] += k * local_stiffness_matrix_b[0, 1]stiffness_matrix[node_indices[0], node_indices[2]] += k * local_stiffness_matrix_b[0, 2]stiffness_matrix[node_indices[1], node_indices[0]] += k * local_stiffness_matrix_b[1, 0]stiffness_matrix[node_indices[1], node_indices[1]] += k *local_stiffness_matrix_b[1, 1]stiffness_matrix[node_indices[1], node_indices[2]] += k * local_stiffness_matrix_b[1, 2]stiffness_matrix[node_indices[2], node_indices[0]] += k * local_stiffness_matrix_b[2, 0]stiffness_matrix[node_indices[2], node_indices[1]] += k * local_stiffness_matrix_b[2, 1]stiffness_matrix[node_indices[2], node_indices[2]] += k * local_stiffness_matrix_b[2, 2]return stiffness_matrix# 解决线性方程系统def solve_linear_system(stiffness_matrix, contact_area, nodes): num_nodes = len(nodes)num_unknowns = num_nodes - len(contact_area)force = np.zeros(num_nodes)displacement = np.zeros(num_nodes)# 应用边界条件for i in range(len(contact_area)):node_index = contact_area[i] - 1force[node_index] = 1# 划分刚度矩阵和力向量stiffness_matrix_global = stiffness_matrix[0:num_unknowns, 0:num_unknowns]force_global = force[0:num_unknowns]# 解线性方程系统displacement_global = spsolve(stiffness_matrix_global,force_global)# 汇总解向量for i in range(num_unknowns):displacement[i] = displacement_global[i]for i in range(len(contact_area)):node_index = contact_area[i] - 1displacement[node_index] = 0return displacement# 绘制位移云图def plot_displacement(nodes, displacement):x_coords = nodes[:, 0]y_coords = nodes[:, 1]plt.triplot(x_coords, y_coords)plt.tricontourf(x_coords, y_coords, displacement, 50, cmap='jet') plt.colorbar()plt.show()# 主函数def main():# 生成网格nodes, elements = generate_mesh()# 定义参数young_modulus_a, young_modulus_b, poisson_ratio_a, poisson_ratio_b, contact_area = define_parameters()# 构建刚度矩阵stiffness_matrix = assemble_stiffness_matrix(nodes, elements, young_modulus_a, young_modulus_b, poisson_ratio_a,poisson_ratio_b)# 解决线性方程displacement = solve_linear_system(stiffness_matrix,contact_area, nodes)# 绘制位移云图plot_displacement(nodes, displacement)# 执行主函数if __name__ == '__main__':main()```以上代码是一个简单的有限元接触问题的示例,通过定义网格划分、初始条件和材料参数等函数,并利用矩阵计算方法解决了线性方程系统,最终绘制出位移云图。
paddleseg 使用方法

paddleseg 使用方法PaddleSeg 是一个基于 PaddlePaddle 深度学习框架的图像分割工具包,可用于图像分割任务的训练和推理。
本文将介绍 PaddleSeg 的使用方法,包括安装、数据准备、模型选择、训练和推理等方面。
首先,安装 PaddleSeg 可以通过以下步骤进行:1. 安装 PaddlePaddle 深度学习框架,可以通过官方文档提供的安装命令进行安装;2. 安装 PaddleSeg,可以通过 pip 安装或者从 GitHub 上下载源代码进行安装。
数据准备是图像分割任务中非常重要的一步,可以按照以下步骤进行:1. 准备训练集和验证集数据,包括原始图像和标注图像;2. 配置数据列表文件,指定数据的路径和标签;3. 使用数据增强技术,对数据进行增强,提高模型的泛化能力。
选择合适的模型是进行图像分割任务的关键,可以根据实际情况选择不同的预训练模型或自定义模型进行训练和推理。
训练模型的步骤如下:1. 配置训练的参数,包括模型的选择、学习率、迭代次数等;2. 使用PaddleSeg 提供的训练脚本进行训练,监控训练过程中的损失值和精度;3. 可以使用验证集进行模型的评估,选择最优的模型进行保存。
推理模型的步骤如下:1. 配置推理的参数,包括模型的选择、推理图像的路径等;2. 使用 PaddleSeg 提供的推理脚本进行推理,生成分割图像;3. 可以对推理结果进行后处理,提高分割的精度。
总的来说,PaddleSeg 是一个功能强大的图像分割工具包,提供了丰富的功能和易用的接口,可以帮助用户快速进行图像分割任务的训练和推理。
通过本文的介绍,您可以了解 PaddleSeg 的基本使用方法,希望对您有所帮助。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Who is using OpenSplice DDS
Combat Management Systems
THALES Naval Netherlands: TACTICOS-CMS 2000+ deployed runtimes in 18 Navies Flycatcher system LCS (GD), ENFMC (NG), LHA-LHD (DRS) NSWC: Open Architecture Test Facility
9
Large ATM program to replace existing Flight Data Processors (FDPs) 5 Centers in France 4 Centers in Italy 2 Centers in Switzerland OpenSplice DDS connects the most critical components of the CoFlight FDP running at a SWAL-2 assurance level OpenSplice DDS distributes and caches 6GBytes worth of flights data plans over redundant LANs
Photo by Angelo Corsaro
Photo by Angelo Corsaro
USACE Grand Coulee Dam
The Grand Coulee Dam is the largest hydro-electric power plant in the United States The dam network connects a 40,000point SCADA system controlling 30 generators and the transmission switchyard USACE originally selected RTI for this project. They replaced RTI with OpenSplice DDS in 2010 due to technical failures in the RTI DDS implementation In September 2011 USACE successfully deployed using OpenSplice DDS
TACTICOS Combat Management System
4
OpenSplice DDS is used at the core of the THALES TACTICOS Combat Management System Deployed in 18 navies on 100+ ships ranging from small frigates to aircraft carriers OpenSplice DDS is used to distribute soft and hard realtime sensor and actuator data
GIC127
MICMK41
MICMK41
COMMS NETWORK
ATAS
SPHERION + XBT / XSV + SURF. TEMP. REC.
HARPOON
GUN 127 MM
30 MM GUNS OFF LINE
MK41 SM2 LAUNCHER
GOALKEEPER
EU Air Traffic Control (ATC)
Meggitt Training Systems: L3 Link Systems: METIS F6: Ultra Electronics ATS: Next Gen Simulation Architecture Next Gen Simulation Solutions Next Gen Satellite Architecture (DARPA) DDS Advanced Tactical Airborne System (OASIS SDK)
COMBAT INFORMATION CENTER
STAFF ROOM
BRIDGE
COMMS ROOM
COTS & SIGMA TYPE PROCESSOR
TORPEDO WEAPON SYSTEM MK32 MOD-9 (MK46)
INTEGRATED MACHINERY CONTROL SYSTEM CCC1 CCC2
CATV BUS
ATM NETWORK
VIDEO INTERFACE CABINET VCR 1/2 SPARE FL. DECK TV CAMERA TV CAMERA DEPARTMENT OFF. / OFF. QUARTERS ETC. WORKSTATION 01 WORKSTATION M 15 15 15 15 PIOD / PTSU PRINTERS LARGE SCREEN DISPLAY 1 LARGE SCREEN DISPLAY 2
6
OpenSplice DDS distributes the “external” Flight Data Plan to Controllers, Control Towers, etc. OpenSplice DDS is used to integrate CoFlight-based Centers OpenSplice DDS Gateway provides interoperability with other Interoperable Centers PanEuropean
SCADA
USACE Chemtech/Siemens - Brazil Cybercrime Defense IDA: Grand Coulee Dam Program „Cybercrime Defense‟ for WAN environment
Copyright PrismTech 2011 Proprietary information subject to nondisclosure
3
Finance
Think Trade: AlgorithmicTrading Group: Automated Trading Application Market Data and Order Processing
Aerospace and Avionics
NASA KSC: Embraer: General Atomics Constellation Program ARES Rocket Launch System On Board Control Systems Ground Control System
SMART-L APAR KH/SCOUT NAV. RADAR HELI APPR. RADAR VESTA OFF LINE R/S APECS-3 ESM / ECM SIRIUS TDS (2x) POS SYSTEM SHIP’S REF. IRC
IFF
LINK 11
SRBOC
VESTA TDLPP VEX/ RCP BTS OSD BTS OSD
2
THALES Air-Defense: USA Naval programs:
Brazilian Navy, Peruvian Navy Australian Navy: NUWC:
DSTO & ADI Torpedo control system
Simulation & Tactical networks
Vehicle Systems
OpenSplice DDS used by NEXTER at the foundation of the Electronics Architecture for Next Generation Military Vehicle Architecture
7
John Deere are using OpenSplice DDS for Intra and Inter-Vehicle communications and control systems
Copyright PrismTech 2011 Proprietary information subject to nondisclosure
Who is using OpenSplice DDS
Transportation
BAE Systems: Amsterdam Metro System CoFlight: NavCom: Nexter: John Deere: Bradley Vectronics Program Flight-plan Management High Accuracy GPS Signaling Military Vehicle Vectronics GPS and commercial Vectronics
5
ATCC Brest
ATCC Paris
ATCC ims
ATCC Geneve ATCC Bordeaux ATCC Aix-enProvence
ATCC Zurich
ATCC Milano
ATCC Padova
ATCC Roma ATCC Brindisi
EU Air Traffic Control (ATC)
F1 Car Video Feed
8
Formula One successfully tested using OpenSplice DDS for distributing video coming from cars during the Abu Dhabi GP During the race, the live video from Petrov was distributed using OpenSplice In the 2011 season OpenSplice DDS will be used for distributing video for F1 cars