OV6620中文资料OV7620中文资料
(en)OV7620
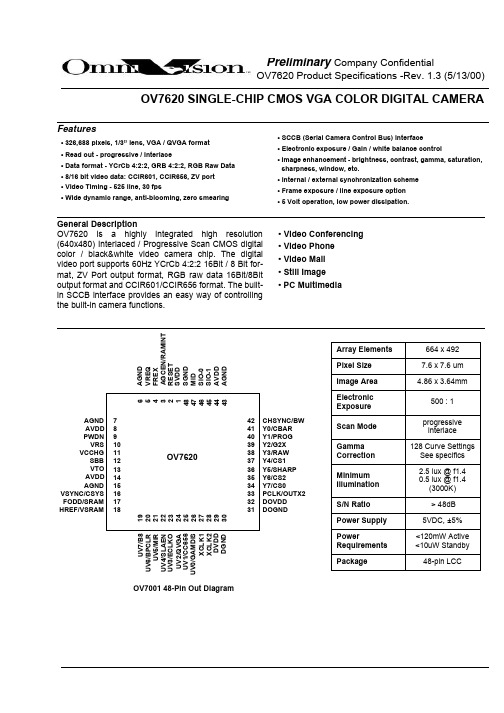
OV7620 Product Specifications -Rev. 1.3 (5/13/00)OV7620 SINGLE-CHIP CMOS VGA COLOR DIGITAL CAMERAFeatures• 326,688 pixels, 1/3” lens, VGA / QVGA format • Read out - progressive / Interlace• Data format - YCrCb 4:2:2, GRB 4:2:2, RGB Raw Data • 8/16 bit video data: CCIR601, CCIR656, ZV port • Video Timing - 525 line, 30 fps• Wide dynamic range, anti-blooming, zero smearing• SCCB (Serial Camera Control Bus) interface • Electronic exposure / Gain / white balance control• Image enhancement - brightness, contrast, gamma, saturation, sharpness, window, etc.• Internal / external synchronization scheme • Frame exposure / line exposure option • 5 Volt operation, low power dissipation.General DescriptionOV7620 is a highly integrated high resolution (640x480) Interlaced / Progressive Scan CMOS digital color / black&white video camera chip. The digital video port supports 60Hz YCrCb 4:2:2 16Bit / 8 Bit for-mat, ZV Port output format, RGB raw data 16Bit/8Bit output format and CCIR601/CCIR656 format. The built-in SCCB interface provides an easy way of controlling the built-in camera functions.• Video Conferencing • Video Phone • Video Mail • Still Image • PC MultimediaOV7001 48-Pin Out DiagramU V 7/B 8U V 6/B P C L R U V 5/M I R U V 4/S L A E N U V 3/E C L K O U V 2/Q V G A U V 1/C C 656U V 0/G A M D I S X C L K 1X C L K 2D V D D D G N D 654321484746454443A G N D V R E Q F R E X A G C E N /R A M I N T R E S E T S V D D S G N D MI D S I O -0S I O -1A V D D A G N D789101112131415161718AGND AVDD PWDN VRS VCCHGSBB VTO AVDD AGNDVSYNC/CSYS FODD/SRAM HREF/VSRAM 313233343536373839404142DOGNDDOVDD PCLK/OUTX2Y7/CS0Y6/CS2Y5/SHARP Y4/CS1Y3/RAW Y2/G2X Y1/PROG Y0/CBAR CHSYNC/BW 192021222324252627282930OV7620Array Elements 664 x 492Pixel Size 7.6 x 7.6 um Image Area 4.86 x 3.64mmElectronic Exposure500 : 1Scan Mode progressive interlace Gamma Correction 128 Curve Settings See specifics Minimum Illumination 2.5 lux @ f1.40.5 lux @ f1.4(3000K)S/N Ratio > 48dB Power Supply 5VDC, ±5% PowerRequirements <120mW Active <10uW Standby Package48-pin LCCSECTION 1PRODUCT OVERVIEWOV7620 is a highly integrated high resolution (640x480) Interlaced / Progressive Scan CMOS digital color / black&white video camera chip. The digital video port supports 60Hz YCrCb 4:2:2 16Bit / 8 Bit format, ZV Port output format, RGB raw data 16Bit/8Bit output format and CCIR601/ CCIR656 format. The built-in SCCB (Serial Camera Control Bus) interface provides an easy way of controlling the built-in camera functions.1.1 FEATURES• Single chip digital color/black&white video camera chip.• Scanning - Interlaced / Progressive Scan.• Format - 1/3” lens compatible.• Image area -4.86X 3.64mm.• Total active pixel elements - (H)664 x (V)492 square pixel.• Default active pixel element -(H)640 x (V)480.• Pixel size: 7.6 x 7.6um.• 10Bit two channel internal A/D Converter and 8/10 Bit Output.• PCLK and HREF polarity programmable.• Digital Output format -YCrCb 16bit/8bit selectable60Hz 16 Bit YCrCb 4:2:2 - 640x48060Hz 8 Bit YCrCb 4:2:2 - 640x480RGB Raw Data Digital Output 16Bit/8Bit selectable• Two-line output:• Y Channel: B G B G B G ...• UV Channel: G R G R G R ...Two-line alternate output:Y Channel: G G G G G G ...UV Channel: B R B R B R ...One-line output, use Y Channel only, effective only in Progressive Scan Mode1st line: B G B G B G B G...2nd line: G R G R G R G R ...• CCIR601 /CCIR656 standard.• YCrCB or YUV output format to support TV or monitor display• ZV Port YUV 16 Bit format.• QVGA format(320x240).• Y/UV or RGB output byte MSB and LSB swap.• SCCB interface, support fast mode: 400 kBit/s.• External Field Sync input.• External Horizontal / Vertical Sync input format, OV7620 worked as slave chip.• Support external micro-controller and RAM interface• Progressive Scan mode: support whole-frame exposure.• Programmable frame rate - 0.5 to 30fps.• Electronic shutter setting (use 27Mhz crystal and default clock rate).Interlaced: 1/60 to 1/15734(s)Progressive Scan: 1/30 to 1/15734(s)• AGC (+24dB) - auto / programmable.• PreAmp Gain 6/12 db.• Auto-Exposure-ratio programmable.• White balance - auto/programmable.• Auto-White-Balance-ratio programmable.• Brightness & contrast adjustment.• Color Saturation adjustment.• Aperture correction.• Multiple gamma correction curve selection.• Multiple luminance gamma correction curve selection.• S/N ratio > 48 dB.• Software/Hardware Reset.• Software/hardware power saving control• Minimum illumination 2.5 lux at f1.4 (3000k).• Optical fill factor is 40%.• Supply: 5 volt for analog and Digital circuit;5volt or 3.3volt for digital interface.• Power consumption < 120 mW.• Power-save mode < 10 uA.• Chip SCCB ID: 0 1 0 CS2 CS1 CS0 1 R/W (CS2 CS1 CS0 select by PIN when power-on, default 0).• 48pin package.1.2 Pin AssignmentsTable 1:Pin Descriptions(Pin type and default level: I-1: digital input+10k pull up; I-0: digital input +10k pull down, XI/XO; xtal IO; /Secondary functions are set during power up; O/I: digital CMOS level output Bias: power supply bias.).Pin #Name Class Function1 SVDD Bias Sensing Power (+5V) pins.8, 14,44AVDD Bias Analog Power (+5V) pins.29DVDD Bias Digital Power (+5V) pins.32DOVDD Bias Digital I/O Power (+5V / +3.3V) pins.48SGND Bias Sensing ground connections. Connect to supply common6, 7, 15, 43 AGND Bias Analog ground connections. Connect to supply common30DGND Bias Digital ground connection. Connect to supply common31DOGND Bias Digital Output ground connection.2RESET I Chip reset, “high” active.3AGCEN/RAMINT I-I AGCEN =1 enables the Auto Gain Control. AGCEN = 0 disables it.This pin setting is effective when pin SBB = 1.RAMINT=1 initializes frame transfer.4FREX I Frame exposure control input, effective in progressive scan only.The positive width of FREX defines the exposure time.5VrEQ CAP Internal voltage reference. Requires an 0.1uF decoupling capacitorto ground.9PWDN I-0PWDN =1 puts chip in power down (sleep) mode.10VrS CAP Internal voltage reference. Requires an 0.1uF decoupling capacitorto ground.11VcCHG CAP Internal voltage reference. Requires an 1.0uF decoupling capacitorto ground.12SBB I SBB = 1 selects the power-up method of programming the internalfunctions. SBB = 0 selects the SCCB pin programming method.Results of the power-up method can only be changed by a newpower-up or reset sequence.13VTO O Video Test Output (NTSC)16VSYNC/CSYS O/I VSYNC: Vertical sync output. This pin is asserted high during sev-eral scan lines in the vertical sync period.CSYS: Composite Sync. When not using SCCB, a 10k pull upchanges pin 42(CHSYNC) to CSYS.17FODD/SRAM O/I FODD: Odd field flag. Asserted high during the odd field, low duringthe even field.SRAM: External SRAM18HREF/VSFRAM O/I HREF: Horizontal window reference output. HREF is high during theactive pixel window, otherwise low.VSFRAM: Vertical Sync Frame.19UV7/B8O/I UV7: Digital output UV bus. UV7 used for 16-bit operation for out-putting chrominance data.B8: Switch for 8 bit mode luminance/Chroma tristate. Default is 16bit mode.20UV6/BPCLR O/I UV6: Digital output UV bus. UV6 used for 16-bit operation for out-putting chrominance data.BPCLR: Bypass RGB color matrix.21UV5/MIR O/I UV5: Digital output UV bus. UV5 used for 16-bit operation for out-putting chrominance data.MIR: Mirror.Pin #Name Class Function22UV4/SLAEN O/I UV4: Digital output UV bus. UV4 used for 16-bit operation for out-putting chrominance data.SLAEN: Slave Enable.23UV3/ECLKO O/I UV3: Digital output UV bus. UV3 used for 16-bit operation for out-putting chrominance data.ECKLO: Swap clock output - changes pin 17(FODD) to XCLK out. 24UV2/QVGA O/I UV2: Digital output UV bus. UV2 used for 16-bit operation for out-putting chrominance data.QVGA: QVGA format (320x240)25UV1/CC656O/I UV1: Digital output UV bus. UV1 used for 16-bit operation for out-putting chrominance data.CC656: CCIR 656 mode.26UV0/GAMDIS O/I UV0: Digital output UV bus. UV0 used for 16-bit operation for out-putting chrominance data.GAMDIS: Disables Chroma Gamma (RGB).27, 28XCLK1, XCLK2XO, XI XCLK1 and XCLK2 are the input/output of the on-chip video oscilla-tor. Nominal crystal clock frequency is 27MHz. If an external clock isused, input to XCLK1, leave XCLK2 unconnected.33PCLK/OUTX2O/I PCLK: Pixel clock output. By default, data is updated at the fallingedge of PCLK and is stable at its rising edge. PCLK runs at the pixelrate in 16-bit bus operations and twice the pixel rate in 8-bit busoperationsOUTX2: Doubles current output.34Y7/CSO O/I Y7: Digital output Y bus. In a 16-bit operation, the luminance data isclocked out of this bus at the rate of one byte per pixel. In 8-bit oper-ation, the luminance data and the chrominance data is multiplexedto this bus.CSO: ID configuation bit for the SCCB slave ID.35Y6/CS2O/I Y6: Digital output Y bus. In a 16-bit operation, the luminance data isclocked out of this bus at the rate of one byte per pixel. In 8-bit oper-ation, the luminance data and the chrominance data is multiplexedto this bus.CS2: ID configuation bit for the SCCB slave ID.36Y5/SHARP O/I Y5: Digital output Y bus. In a 16-bit operation, the luminance data isclocked out of this bus at the rate of one byte per pixel. In 8-bit oper-ation, the luminance data and the chrominance data is multiplexedto this bus.SHARP: Enable Analog Sharpness.37Y4/CS1O/I Y4: Digital output Y bus. In a 16-bit operation, the luminance data isclocked out of this bus at the rate of one byte per pixel. In 8-bit oper-ation, the luminance data and the chrominance data is multiplexedto this bus.CS1: ID configuation bit for the SCCB slave ID.38Y3/RAW O/I Y3: Digital output Y bus. In a 16-bit operation, the luminance data isclocked out of this bus at the rate of one byte per pixel. In 8-bit oper-ation, the luminance data and the chrominance data is multiplexedto this bus.RAW: Raw Data.39Y2/G2X O/I Y2: Digital output Y bus. In a 16-bit operation, the luminance data isclocked out of this bus at the rate of one byte per pixel. In 8-bit oper-ation, the luminance data and the chrominance data is multiplexedto this bus.G2X: Gain 2X.Pin #Name Class Function40Y1/PROG O/I Y1: Digital output Y bus. In a 16-bit operation, the luminance data isclocked out of this bus at the rate of one byte per pixel. In 8-bit oper-ation, the luminance data and the chrominance data is multiplexedto this bus.PROG: Progressive Scan Mode.41Y0/CBAR O/I Y0: Digital output Y bus. In a 16-bit operation, the luminance data isclocked out of this bus at the rate of one byte per pixel. In 8-bit oper-ation, the luminance data and the chrominance data is multiplexedto this bus.CBAR: Color Bar Test Pattern.42CHSYNC/BW O/I CHSYNC: Digital output for either composite sync or horizontal syncsignal.BW: Enables Black & White.45SIO-1I SCCB Serial clock input with schmitt trigger.46SIO-0IO SCCB Serial data, input with schmitt trigger.47MID I-0Multiple SCCB slave ID enable.MID = 1 SCCB slave ID is configurable through power up setting inCS(2:0)MID = 0 SCCB slave ID is preset to 42H/43H.1.3 CHIP OPERATIONReferring to FIG 1.1, OV7620 includes a 664x492 resolution image array, an analog signal pro-cessor, dual 10bit A/D converters, analog video mux, digital data formatter and video port, SCCB interface with its registers, the digital controls including timing block, exposure block and white balance.FIG 1.1 OV7620Block DiagramOV7620is a 1/3 inch CMOS imaging device. The sensor contains approximately 326,688 pixels.It is base on field integration read-out system with line-by-line transfer and an electronic shutter with synchronous pixel read out scheme. The color filter of the sensor consists of primary color RG/GB array arranged in line alternating fashion.RVO BUO GYOimage r o w s e l e c tcolumn sense amparrayCb CrY VcSAT GAMMAwhiteexposure detect WB controlbalancedetectAWBAGCENXVCLK1(664X492)RGB1/2sys-clkAWBTH/VcCNTr g bmxFODDVSYNCHREFPCLK video timing generatorFZEXexposurecontrolVrEQVcSHPFREZCHSYNCmxADCf o r m a t t e rY(7:0)UV(7:0)SCCBinterfaceSIO-1SIO-0registersv i d e o p o r tADCanalog processingFSIN MIR DENBmxPROGAWBTMSBBThe majority of signal processing is performed in the analog processing block, which does color separation, matrixing, AGC, gamma correction, color correction, color balance, black level cali-bration, knee smooth, aperture correction, controls for the luminance and chrominance picture and anti-alias filtering. The analog video signals are based on the formula:Y = 0.59G + 0.31R + 0.11B; where R,G,B is the equivalent color components in each pixelU = R-Y;V = B-Y;Another output data format is YCrCb, its formula is as follows:Y = 0.59G + 0.31R + 0.11BCr = 0.713 x (R - Y)Cb = 0.564 X (B - Y)The YCrCb /RGB Raw Data signal is fed to two 10 bit A/D converters, one for the Y/R&G chan-nel, one is shared by Cr&Cb / B&G channels. The A/D converted data stream is further condi-tioned in the digital formatter, finally the 16bit or 8 bit data muxing is done in the digital video port.The on-chip 10 bit A/D can operate up to 13.5 MSPS, since it is fully synchronous to the pixel rate, the conversion rate always follows the frame rate. An A/D black-level-calibration circuitry ensures the black level of Y/RGB is translated to value 16, and the peak white level is limited to 240; CrCb black level is 128, Peak/Bottom is 240/16. RGB raw data output range is 16/240, 0 & 255 reserved for sync flag. Also OV7620 support non-CCIR standard output range, that is 1/254, 0 and 255 are reserved for sync flag.The computation in the electronic exposure control is based on the brightness of the full image. The exposure algorithm is optimized for normal scene which assuming the subject is well-lit rel-ative to the background. In case of a different backlight condition, there is also a AEC White/ Black ratio selection register, which can be used as AEC algorithm adjustment to get special im-age. Along with the AEC is the on chip AGC which can boost gain up to 24dB if needed. To achieve proper color temperature, auto or manual white balance control is also available. There is a separate saturation, brightness contrast and sharpness adjustment for further fine tuning of the picture quality. OV7620 provide a set of register to control White Balance ratio register which can be used as increase/decrease image field Red/Blue component ratio. In most case, the de-fault setting may be sufficient.The windowing feature allows the user to size the window according to their need. The window is sizable from 4X2 to 664x492 and can be placed anywhere inside the 664X492 boundary. Not-ed this function does not change the frame rate or data rate, it simply change the assertion of the HREF to match with the horizontal and vertical region that is programmed by the user. A typical application for this is hardware zooming, and panning. Default output window is 640x480.The digital video port offers 16 bit 4:2:2 format complying to the 60Hz CCIR601 timing standard. OV7620 also supports 8 bit data format in Cb Y Cr Y order by using port Y only and running at twice the pixel rate while the port UV is inactive. Other than the 16 bit data bus, OV7620 supplies standard video timing signals such as VSYNC, HREF, PCLK, FODD, CHSYNC.OV7620 support standard ZV Port Interface Timing. It provides VSYNC, CHSYNC, PCLK and 16 Bit data bus: Y<7:0> and UV<7:0>. PCLK rising edge clock data bus into ZV port.To decrease data transfer rate while high resolution image unnecessary, OV7620 provide a so-lution, that is it can output QVGA resolution image. This mode decrease pixel rate one half. The resolution default value is 320x240 and can be programmable. Every line only output one half data. For Interlaced Mode, all field line output (320), for Progressive Scan Mode, only one half line data output.The digital video port also offer RGB Raw Data 16 Bit/8 Bit format. The output sequence is matched to OV7620 Color Filter Pattern, that is UV channel output sequence is G R G R ..., Y Channel output sequence is B G B G,....To 8 Bit RGB Raw data output format, just use Y channel and disable UV channel, output sequence is B G R G ....OV7620 support CCIR656 YCrCb 4:2:2 digital output format. The SAV(Start of Active Video) and EAV(End of Active Video) is just at the beginning and the end of HREF window. So the position of SAV and EAV is changing with active pixel window. Also you can get 8 bit RGB raw data with SAV and EAV information.OV7620 support some flexible YUV output format. One is standard YUV 4:2:2. Another is U V sequence swap format, that means UV channel output V U V U ...(16 Bit) and V Y U Y ...(8 Bit). The 3rd format is Y/UV sequence swap in 8 Bit output, that is Y U Y V ....OV7620 can be use as black&white camera. At this mode, it’s vertical resolution will be higher than color mode. All data will be output from Y port and UV port will be tri-state. Data (Y/RGB) output rate is same as 16 Bit mode.OV7620 can be programmable to swap Y/UV or RGB output byte MSB and LSB. Y7 - Y0 default sequence is Y7 is MSB and Y0 is LSB. When swap, Y7 is LSB and Y0 is MSB, relative middle bits are swapped.An important factor about digital camera is how convenient the interface is, OV7620 has made the frame rate programmable and the A/D synchronous to the actual pixel rate. Essentially, it is a whole image capture system in a single chip. Since the internal AEC has a range of 1:260, and AGC have 24dB, for the most of applications, the camera can adjust itself to meet the lighting condition without user intervention.OV7620 support hardware/software RESET function: when RESET pin tie to high, whole chip will be reset including all register. Hardware sleeping mode: when PWDN tie to high, chip clock will be stop and internal circuit reset except all SCCB register. Also there is a SCCB control soft-ware reset control register 12 bit 7, which is same as hardware RESET pin function.OV7620 hardware reset time minimum is 1 ms.OV7620 support hardware/software power saving mode. When the PWDN pin tie to high, whole chip will be set to power down status without any current consumption. For software power down control, all current set to zero except crystal circuit. In power down mode, all SCCB register value will be kept.Two control mechanism have been built into OV7620: A. one time read-in of pin states at power up or RESET status, including hardware and software reset; B. SCCB interface. Two methods are mutually exclusive, only one is used at a time, selected by pin SBB. Method A has limited access to full chip features.The power up reset method is a one time setting, the setting can not be altered later. The pinsused in the control are shared with the digital video port data bus. At power up, the video port is initially tri-stated, allowing the external pull-up/pull-down resistor to set the default operating con-ditions, 2048 clocks later the video port resumes normal function. The detail of the power up pin control method is explained in the individual pin out section.SCCB interface provides full access to all the features. The detail is in the SCCB register set.1.4 VIDEO FORMATTable 1.1: 4:2:2 16 bit FormatData Bus Pixel Byte SequenceY7Y7Y7Y7Y7Y7Y7Y6Y6Y6Y6Y6Y6Y6Y5Y5Y5Y5Y5Y5Y5Y4Y4Y4Y4Y4Y4Y4Y3Y3Y3Y3Y3Y3Y3Y2Y2Y2Y2Y2Y2Y2Y1Y1Y1Y1Y1Y1Y1Y0Y0Y0Y0Y0Y0Y0UV7U7V7U7V7U7V7UV6U6V6U6V6U6V6UV5U5V5U5V5U5V5UV4U4V4U4V4U4V4UV3U3V3U3V3U3V3UV2U2V2U2V2U2V2UV1U1V1U1V1U1V1UV0U0V0U0V0U0V0Y FRAME012345UV FRAME024Table 1.2: 4:2:2 8 bit FormatData Bus Pixel Byte SequenceY7U7Y7V7Y7U7Y7V7Y7 Y6U6Y6V6Y6U6Y6V6Y6 Y5U5Y5V5Y5U5Y5V5Y5 Y4U4Y4V4Y4U4Y4V4Y4 Y3U3Y3V3Y3U3Y3V3Y3 Y2U2Y2V2Y2U2Y2V2Y2 Y1U1Y1V1Y1U1Y1V1Y1 Y0U0Y0V0Y0U0Y0V0Y0 Y FRAME0123 UV FRAME0 1 2 3FIG 1.2 Pixel Data Bus (YUV Output)Note: Tclk is pixel clock period. When OV7620 system clock is 27MHz, Tclk=74ns for 16 Bit out-put; Tclk=37ns for 8 Bit output. Tsu is HREF set-up time, maximum is 15 ns; Thd is HREF hold time, maximum is 15 ns.Y<7:0>PCLKHREFUV<7:0>1010YY8080U V repeat for all data bytesPixel Data 16 bit TimingY<7:0>PCLKHREFrepeat for all data bytesPixel Data 8 bit TimingU Y V Y 80101080Use PCLK rising edge latch data busUse PCLK rising edge latch data busTsuThdThdTclkTclk10Tsu1.5 RGB Raw Data FormatRGB Raw data output from Y and UV port.UV port output data sequence: G R G R G R ... or B R B R ...(refer to register 28 bit 2)Y port output data sequence: B G B G B G ... or G G G G ...(refer to register 28 bit 2)Array Color Filter Patter is Bayer-PatternTable 1.3:R\C1234.6416426436441B11G12B13G14B G B G2G21R22G23R24G R G R3B31G32B33G34B G B G4G41R42G43R44G R G R5B51G52B53G54B G B G.481B G B G B G B G482G R G R G R G R483B G B G B G B G484G R G R G R G R485B G B G B G B G1.5.1 Interlaced Mode 16 Bit Format (HREF total 242)1.5.1.1 Default mode: In ODD FIELD, 1st HREF output UV channel is 2nd line: G21 R22 G23 R24... and Y channel is Row 1: B11 G12 B13 G14 ... . 2nd HREF output UV channel output 4th line: G41 R42 G43 R44 ... and Y port output 3rd line: B31 G32 B33 G34 ... , so on. Data bus should be latched by PCLK rising edge and related to the exact phys-ical position In Even FIELD, 1st HREF Y channel output B31 G32 B33 G34 ... and UV channel output G21 R22 G23 R24 ...2nd HREF Y channel output B51 G52 B53 G54 ... and UV output G41 R42 G43 R44 ....1.5.1.2 YG mode: In ODD FIELD, 1st HREF Y channel output G21 G12 G23 G14 ... and UV channel is B11 R22 B13 R24 .... 2nd HREF Y channel output G41 G32 G43 G34 ... and UV channel output B31 R42 B33 R44 .... In EVEN FIELD, 1st HREF Y channel output G21 G32 G23 G34 ... and UV channel output B31 R22 B33 R24 ... 2nd HREF channel output G41 G52 G43 G54 ... and UV channel output B51 R42 B53 R44 ...1.5.2 Progressive Scan Mode 16 Bit Format (HREF total 484)1.5.2.3 Default mode: 1st HREF UV channel output unstable data, Y output B11 G12 B13 G14 .... 2nd HREF UV channel output G21 R22 G23 R24 ..., Y output B11 G12 B13 G14 ... 3rd HREF UV channel output G21 R22 G23 R24 ..., Y output B31 G23 B33 G34 .... Every line data output twice.1.5.2.4 YG mode: 1st HREF Y and UV output unstable data. 2nd HREF Y channel output G21 G12 G23 G14 ..., UV output B11 R22 B13 R24 ... 3rd HREF Y is G21 G32 G23 G34 ..., UV channel is B31 R22 B33 R24 ... Every line data out-put twice.1.5.2.5 One line mode: 1st HREF Y channel output B11 G12 B13 G14 ..., 2nd HREF Y channel output G21 R22 G23 R24 ..., so on. UV channel tri-state.1.5.3 Interlaced Mode 8 Bit (242 HREF)1.5.3.6 ODD FIELD: 1st HREF Y channel output B11 G21 R22 G12 ... 2nd HREF Y channel output B31 G41 R42 G32..., so on. PCLK timing is double and use PCLK rising edge latch data bus. UV channel tri-state.1.5.3.7 EVEN FIELD: 1st HREF Y channel output B31 G21 R22 G32 ... 2nd HREF Y channel output B51 G41 R42 G52 ..., so on. PCLK timing is double and data bus should be latched by its rising edge. UV channel tri-state.1.5.4 Progressive Scan Mode 8 Bit (484 HREF)1.5.4.8 1st HREF Y channel output unstable data. 2nd HREF Y channel output B11 G21 R22 G12 ... 2nd HREF Y channel output B31 G21 R22 G32 ..., so on. PCLK timing is double and PCLK rising edge latch data bus. UV chan-nel tri-state. Every line data output twice.RGB raw data timing chart is as follows:FIG 1.3 Pixel Data Bus (RGB Output)Note: Tclk is pixel clock period. When OV7620 system clock is 27MHz, Tclk=74ns for 16 Bit out-put; Tclk=37ns for 8 Bit output. Tsu is HREF set-up time, maximum is 15 ns; Thd is HREF hold time, maximum is 15 ns.UV<7:0>PCLKHREFY<7:0>1010GR1010B G repeat for all data bytesPixel Data 16 bit TimingY<7:0>PCLKHREF1010BBrepeat for all data bytesPixel Data 8 bit Timing10GG10PCLK rising edge latch data busPCLK rising edge latch data busTclkTclkThdThdTsuTsu1.6 ZV Port Interlace TimingThe ZV Port is a single-source uni-directional video bus between a PC Card socket and a VGA controller. The ZV Port complies with CCIR601 timing to allow NTSC decoders to deliver real-time digital video straight into the VGA frame buffer from a PC Card. OV7620 support ZV Port Timing, which output signal can be output to a PC Card directly, then to VGA controller. The tim-ing is as below:FIG 1.4 ZV Port TimingNotes: ZV Port format output signal include:VSYNC : Vertical sync pulse.HREF : Horizontal valid data output window.PCLK : Pixel clock used to clock valid data and CHSYNC into ZV Port. Default frequency is 13.5MHz whenuse 27MHz as system clock. Rising edge of PCLK is used to clock the 16 Bit data.Y<7:0>: 8 Bit luminance data bus..UV<7:0>: 8 Bit chrominance data bus.All Timing Parameters is list in following table.‘VSYNCPCLKY<7:0>UV<7:0>/HREF639640t8t8Even Field 1(FODD=0)Odd Field(FODD=1)t6t7t1t2t3t4Horizontal TimingVSYNCY<7:0>/UV<7:0>Valid Data1 Line TvsTve t5Tline12Table 1.4: ZV Port AC ParameterSymbol Parameter Min.Max.t1PCLK fall timing 4 ns8 nst2PCLK low time30 nst3PCLK rise time 4 ns8 nst4PCLK high time30 nst5PCLK period74 nst6Y/UV/HREF setup time10 nst7Y/UV/HREF hold time20 nst8VSYNC setup/hold time to HREF 1 usNote: In Interlaced Mode, there are Even/Odd field different (t8). When In Progressive Scan Mode, only frame timing same as Even field(t8).After VSYNC falling edge, OV7620 will output black reference level, the line number is Tvs, which is the line number between the 1st HREF rising edge after VSYNC falling edge and 1st valid data CHSYNC rising edge. Then valid data, then black reference, line number is Tve, which is the line number between last valid data CHSYNC rising edge and 1st CHSYNC rising edge after VSYNC rising edge. The black reference output line number is dependent on vertical win-dow setting.When in default setting, Tvs = 14*Tline, which is changed with register register 19<7:0>. If in Interlaced Mode, register 19<7:0> change 1 step, Tvs increase 1 line. If in Progressive Scan Mode, register 19<7:0> step equal to 2 line.When in default setting, Tve = 4*Tline for Odd Field, Tve = 3*Tline for Even Field, which is changed with register register 1A<7:0>. If in Interlaced Mode, register 1A<7:0> change 1 step, Tve increase 1 line. If in Progressive Scan Mode, register 1A<7:0> step equal to 2 line.In Progressive Scan Mode, Tve = 3*Tline and Tvs = 35*Tline.1.7 Interface for External RAM Controller and Micro-controllerOV7620 can be programmed to output single frame data to external RAM. The structure block diagram is as follows:The timing diagram is as follows:OV7620FPGA u-CPUDRAM / SRAMDataAddACK SCCB and InitialSRAM DATAHREF VS AGCEN Tri-StateTri-State。
ov7620数据手册
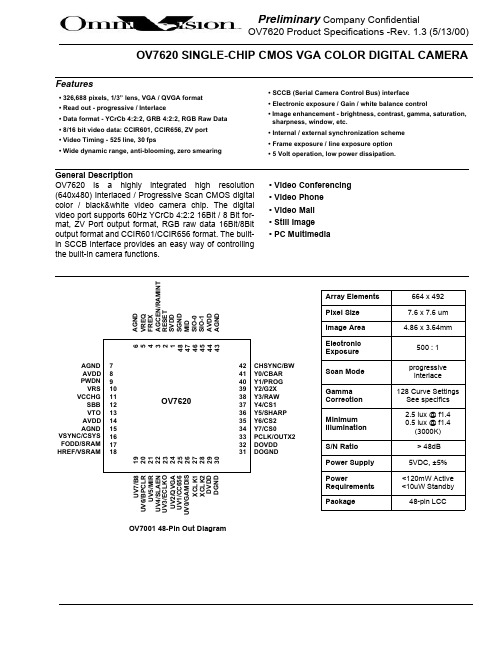
OV7620 Product Specifications -Rev. 1.3 (5/13/00)OV7620 SINGLE-CHIP CMOS VGA COLOR DIGITAL CAMERAFeatures• 326,688 pixels, 1/3” lens, VGA / QVGA format • Read out - progressive / Interlace• Data format - YCrCb 4:2:2, GRB 4:2:2, RGB Raw Data • 8/16 bit video data: CCIR601, CCIR656, ZV port • Video Timing - 525 line, 30 fps• Wide dynamic range, anti-blooming, zero smearing• SCCB (Serial Camera Control Bus) interface • Electronic exposure / Gain / white balance control• Image enhancement - brightness, contrast, gamma, saturation, sharpness, window, etc.• Internal / external synchronization scheme • Frame exposure / line exposure option • 5 Volt operation, low power dissipation.General DescriptionOV7620 is a highly integrated high resolution (640x480) Interlaced / Progressive Scan CMOS digital color / black&white video camera chip. The digital video port supports 60Hz YCrCb 4:2:2 16Bit / 8 Bit for-mat, ZV Port output format, RGB raw data 16Bit/8Bit output format and CCIR601/CCIR656 format. The built-in SCCB interface provides an easy way of controlling the built-in camera functions.• Video Conferencing • Video Phone • Video Mail • Still Image • PC MultimediaOV7001 48-Pin Out DiagramU V 7/B 8U V 6/B P C L R U V 5/M I R U V 4/S L A E N U V 3/E C L K O U V 2/Q V G A U V 1/C C 656U V 0/G A M D I S X C L K 1X C L K 2D V D D D G N D 654321484746454443A G N D V R E Q F R E X A G C E N /R A M I N T R E S E T S V D D S G N D M I D S I O -0S I O -1A V D D A G N D789101112131415161718AGND AVDD PWDN VRS VCCHGSBB VTO AVDD AGNDVSYNC/CSYS FODD/SRAM HREF/VSRAM 313233343536373839404142DOGNDDOVDD PCLK/OUTX2Y7/CS0Y6/CS2Y5/SHARP Y4/CS1Y3/RAW Y2/G2X Y1/PROG Y0/CBAR CHSYNC/BW 192021222324252627282930OV7620Array Elements 664 x 492Pixel Size 7.6 x 7.6 um Image Area 4.86 x 3.64mmElectronic Exposure500 : 1Scan Mode progressive interlace Gamma Correction 128 Curve Settings See specifics Minimum Illumination 2.5 lux @ f1.40.5 lux @ f1.4(3000K)S/N Ratio > 48dB Power Supply 5VDC, ±5% PowerRequirements <120mW Active <10uW Standby Package48-pin LCCSECTION 1PRODUCT OVERVIEWOV7620 is a highly integrated high resolution (640x480) Interlaced / Progressive Scan CMOS digital color / black&white video camera chip. The digital video port supports 60Hz YCrCb 4:2:2 16Bit / 8 Bit format, ZV Port output format, RGB raw data 16Bit/8Bit output format and CCIR601/ CCIR656 format. The built-in SCCB (Serial Camera Control Bus) interface provides an easy way of controlling the built-in camera functions.1.1 FEATURES• Single chip digital color/black&white video camera chip.• Scanning - Interlaced / Progressive Scan.• Format - 1/3” lens compatible.• Image area -4.86X 3.64mm.• Total active pixel elements - (H)664 x (V)492 square pixel.• Default active pixel element -(H)640 x (V)480.• Pixel size: 7.6 x 7.6um.• 10Bit two channel internal A/D Converter and 8/10 Bit Output.• PCLK and HREF polarity programmable.• Digital Output format -YCrCb 16bit/8bit selectable60Hz 16 Bit YCrCb 4:2:2 - 640x48060Hz 8 Bit YCrCb 4:2:2 - 640x480RGB Raw Data Digital Output 16Bit/8Bit selectable• Two-line output:• Y Channel: B G B G B G ...• UV Channel: G R G R G R ...Two-line alternate output:Y Channel: G G G G G G ...UV Channel: B R B R B R ...One-line output, use Y Channel only, effective only in Progressive Scan Mode1st line: B G B G B G B G...2nd line: G R G R G R G R ...• CCIR601 /CCIR656 standard.• YCrCB or YUV output format to support TV or monitor display• ZV Port YUV 16 Bit format.• QVGA format(320x240).• Y/UV or RGB output byte MSB and LSB swap.• SCCB interface, support fast mode: 400 kBit/s.• External Field Sync input.• External Horizontal / Vertical Sync input format, OV7620 worked as slave chip.• Support external micro-controller and RAM interface• Progressive Scan mode: support whole-frame exposure.• Programmable frame rate - 0.5 to 30fps.• Electronic shutter setting (use 27Mhz crystal and default clock rate).Interlaced: 1/60 to 1/15734(s)Progressive Scan: 1/30 to 1/15734(s)• AGC (+24dB) - auto / programmable.• PreAmp Gain 6/12 db.• Auto-Exposure-ratio programmable.• White balance - auto/programmable.• Auto-White-Balance-ratio programmable.• Brightness & contrast adjustment.• Color Saturation adjustment.• Aperture correction.• Multiple gamma correction curve selection.• Multiple luminance gamma correction curve selection.• S/N ratio > 48 dB.• Software/Hardware Reset.• Software/hardware power saving control• Minimum illumination 2.5 lux at f1.4 (3000k).• Optical fill factor is 40%.• Supply: 5 volt for analog and Digital circuit;5volt or 3.3volt for digital interface.• Power consumption < 120 mW.• Power-save mode < 10 uA.• Chip SCCB ID: 0 1 0 CS2 CS1 CS0 1 R/W (CS2 CS1 CS0 select by PIN when power-on, default 0).• 48pin package.1.2 Pin AssignmentsTable 1:Pin Descriptions(Pin type and default level: I-1: digital input+10k pull up; I-0: digital input +10k pull down, XI/XO; xtal IO; /Secondary functions are set during power up; O/I: digital CMOS level output Bias: power supply bias.).Pin #Name Class Function1 SVDD Bias Sensing Power (+5V) pins.8, 14,44AVDD Bias Analog Power (+5V) pins.29DVDD Bias Digital Power (+5V) pins.32DOVDD Bias Digital I/O Power (+5V / +3.3V) pins.48SGND Bias Sensing ground connections. Connect to supply common6, 7, 15, 43 AGND Bias Analog ground connections. Connect to supply common30DGND Bias Digital ground connection. Connect to supply common31DOGND Bias Digital Output ground connection.2RESET I Chip reset, “high” active.3AGCEN/RAMINT I-I AGCEN =1 enables the Auto Gain Control. AGCEN = 0 disables it.This pin setting is effective when pin SBB = 1.RAMINT=1 initializes frame transfer.4FREX I Frame exposure control input, effective in progressive scan only.The positive width of FREX defines the exposure time.5VrEQ CAP Internal voltage reference. Requires an 0.1uF decoupling capacitorto ground.9PWDN I-0PWDN =1 puts chip in power down (sleep) mode.10VrS CAP Internal voltage reference. Requires an 0.1uF decoupling capacitorto ground.11VcCHG CAP Internal voltage reference. Requires an 1.0uF decoupling capacitorto ground.12SBB I SBB = 1 selects the power-up method of programming the internalfunctions. SBB = 0 selects the SCCB pin programming method.Results of the power-up method can only be changed by a newpower-up or reset sequence.13VTO O Video Test Output (NTSC)16VSYNC/CSYS O/I VSYNC: Vertical sync output. This pin is asserted high during sev-eral scan lines in the vertical sync period.CSYS: Composite Sync. When not using SCCB, a 10k pull upchanges pin 42(CHSYNC) to CSYS.17FODD/SRAM O/I FODD: Odd field flag. Asserted high during the odd field, low duringthe even field.SRAM: External SRAM18HREF/VSFRAM O/I HREF: Horizontal window reference output. HREF is high during theactive pixel window, otherwise low.VSFRAM: Vertical Sync Frame.19UV7/B8O/I UV7: Digital output UV bus. UV7 used for 16-bit operation for out-putting chrominance data.B8: Switch for 8 bit mode luminance/Chroma tristate. Default is 16bit mode.20UV6/BPCLR O/I UV6: Digital output UV bus. UV6 used for 16-bit operation for out-putting chrominance data.BPCLR: Bypass RGB color matrix.21UV5/MIR O/I UV5: Digital output UV bus. UV5 used for 16-bit operation for out-putting chrominance data.MIR: Mirror.22UV4/SLAEN O/I UV4: Digital output UV bus. UV4 used for 16-bit operation for out-putting chrominance data.SLAEN: Slave Enable.23UV3/ECLKO O/I UV3: Digital output UV bus. UV3 used for 16-bit operation for out-putting chrominance data.ECKLO: Swap clock output - changes pin 17(FODD) to XCLK out. 24UV2/QVGA O/I UV2: Digital output UV bus. UV2 used for 16-bit operation for out-putting chrominance data.QVGA: QVGA format (320x240)25UV1/CC656O/I UV1: Digital output UV bus. UV1 used for 16-bit operation for out-putting chrominance data.CC656: CCIR 656 mode.26UV0/GAMDIS O/I UV0: Digital output UV bus. UV0 used for 16-bit operation for out-putting chrominance data.GAMDIS: Disables Chroma Gamma (RGB).27, 28XCLK1, XCLK2XO, XI XCLK1 and XCLK2 are the input/output of the on-chip video oscilla-tor. Nominal crystal clock frequency is 27MHz. If an external clock isused, input to XCLK1, leave XCLK2 unconnected.33PCLK/OUTX2O/I PCLK: Pixel clock output. By default, data is updated at the fallingedge of PCLK and is stable at its rising edge. PCLK runs at the pixelrate in 16-bit bus operations and twice the pixel rate in 8-bit busoperationsOUTX2: Doubles current output.34Y7/CSO O/I Y7: Digital output Y bus. In a 16-bit operation, the luminance data isclocked out of this bus at the rate of one byte per pixel. In 8-bit oper-ation, the luminance data and the chrominance data is multiplexedto this bus.CSO: ID configuation bit for the SCCB slave ID.35Y6/CS2O/I Y6: Digital output Y bus. In a 16-bit operation, the luminance data isclocked out of this bus at the rate of one byte per pixel. In 8-bit oper-ation, the luminance data and the chrominance data is multiplexedto this bus.CS2: ID configuation bit for the SCCB slave ID.36Y5/SHARP O/I Y5: Digital output Y bus. In a 16-bit operation, the luminance data isclocked out of this bus at the rate of one byte per pixel. In 8-bit oper-ation, the luminance data and the chrominance data is multiplexedto this bus.SHARP: Enable Analog Sharpness.37Y4/CS1O/I Y4: Digital output Y bus. In a 16-bit operation, the luminance data isclocked out of this bus at the rate of one byte per pixel. In 8-bit oper-ation, the luminance data and the chrominance data is multiplexedto this bus.CS1: ID configuation bit for the SCCB slave ID.38Y3/RAW O/I Y3: Digital output Y bus. In a 16-bit operation, the luminance data isclocked out of this bus at the rate of one byte per pixel. In 8-bit oper-ation, the luminance data and the chrominance data is multiplexedto this bus.RAW: Raw Data.39Y2/G2X O/I Y2: Digital output Y bus. In a 16-bit operation, the luminance data isclocked out of this bus at the rate of one byte per pixel. In 8-bit oper-ation, the luminance data and the chrominance data is multiplexedto this bus.G2X: Gain 2X.40Y1/PROG O/I Y1: Digital output Y bus. In a 16-bit operation, the luminance data isclocked out of this bus at the rate of one byte per pixel. In 8-bit oper-ation, the luminance data and the chrominance data is multiplexedto this bus.PROG: Progressive Scan Mode.41Y0/CBAR O/I Y0: Digital output Y bus. In a 16-bit operation, the luminance data isclocked out of this bus at the rate of one byte per pixel. In 8-bit oper-ation, the luminance data and the chrominance data is multiplexedto this bus.CBAR: Color Bar Test Pattern.42CHSYNC/BW O/I CHSYNC: Digital output for either composite sync or horizontal syncsignal.BW: Enables Black & White.45SIO-1I SCCB Serial clock input with schmitt trigger.46SIO-0IO SCCB Serial data, input with schmitt trigger.47MID I-0Multiple SCCB slave ID enable.MID = 1 SCCB slave ID is configurable through power up setting inCS(2:0)MID = 0 SCCB slave ID is preset to 42H/43H.1.3 CHIP OPERATIONReferring to FIG 1.1, OV7620 includes a 664x492 resolution image array, an analog signal pro-cessor, dual 10bit A/D converters, analog video mux, digital data formatter and video port, SCCB interface with its registers, the digital controls including timing block, exposure block and white balance.FIG 1.1 OV7620Block DiagramOV7620is a 1/3 inch CMOS imaging device. The sensor contains approximately 326,688 pixels.It is base on field integration read-out system with line-by-line transfer and an electronic shutter with synchronous pixel read out scheme. The color filter of the sensor consists of primary color RG/GB array arranged in line alternating fashion.RVO BUO GYOimage r o w s e l e c tcolumn sense amparrayCb CrY VcSAT GAMMAwhiteexposure detect WB controlbalancedetectAWBAGCENXVCLK1(664X492)RGB1/2sys-clkAWBTH/VcCNTr g bmxFODDVSYNCHREFPCLK video timing generatorFZEXexposurecontrolVrEQVcSHPFREZCHSYNCmxADCf o r m a t t e rY(7:0)UV(7:0)SCCBinterfaceSIO-1SIO-0registersv i d e o p o r tADCanalog processingFSIN MIR DENBmxPROGAWBTMSBBThe majority of signal processing is performed in the analog processing block, which does color separation, matrixing, AGC, gamma correction, color correction, color balance, black level cali-bration, knee smooth, aperture correction, controls for the luminance and chrominance picture and anti-alias filtering. The analog video signals are based on the formula:Y = 0.59G + 0.31R + 0.11B; where R,G,B is the equivalent color components in each pixelU = R-Y;V = B-Y;Another output data format is YCrCb, its formula is as follows:Y = 0.59G + 0.31R + 0.11BCr = 0.713 x (R - Y)Cb = 0.564 X (B - Y)The YCrCb /RGB Raw Data signal is fed to two 10 bit A/D converters, one for the Y/R&G chan-nel, one is shared by Cr&Cb / B&G channels. The A/D converted data stream is further condi-tioned in the digital formatter, finally the 16bit or 8 bit data muxing is done in the digital video port.The on-chip 10 bit A/D can operate up to 13.5 MSPS, since it is fully synchronous to the pixel rate, the conversion rate always follows the frame rate. An A/D black-level-calibration circuitry ensures the black level of Y/RGB is translated to value 16, and the peak white level is limited to 240; CrCb black level is 128, Peak/Bottom is 240/16. RGB raw data output range is 16/240, 0 & 255 reserved for sync flag. Also OV7620 support non-CCIR standard output range, that is 1/254, 0 and 255 are reserved for sync flag.The computation in the electronic exposure control is based on the brightness of the full image. The exposure algorithm is optimized for normal scene which assuming the subject is well-lit rel-ative to the background. In case of a different backlight condition, there is also a AEC White/ Black ratio selection register, which can be used as AEC algorithm adjustment to get special im-age. Along with the AEC is the on chip AGC which can boost gain up to 24dB if needed. To achieve proper color temperature, auto or manual white balance control is also available. There is a separate saturation, brightness contrast and sharpness adjustment for further fine tuning of the picture quality. OV7620 provide a set of register to control White Balance ratio register which can be used as increase/decrease image field Red/Blue component ratio. In most case, the de-fault setting may be sufficient.The windowing feature allows the user to size the window according to their need. The window is sizable from 4X2 to 664x492 and can be placed anywhere inside the 664X492 boundary. Not-ed this function does not change the frame rate or data rate, it simply change the assertion of the HREF to match with the horizontal and vertical region that is programmed by the user. A typical application for this is hardware zooming, and panning. Default output window is 640x480.The digital video port offers 16 bit 4:2:2 format complying to the 60Hz CCIR601 timing standard. OV7620 also supports 8 bit data format in Cb Y Cr Y order by using port Y only and running at twice the pixel rate while the port UV is inactive. Other than the 16 bit data bus, OV7620 supplies standard video timing signals such as VSYNC, HREF, PCLK, FODD, CHSYNC.OV7620 support standard ZV Port Interface Timing. It provides VSYNC, CHSYNC, PCLK and 16 Bit data bus: Y<7:0> and UV<7:0>. PCLK rising edge clock data bus into ZV port.To decrease data transfer rate while high resolution image unnecessary, OV7620 provide a so-lution, that is it can output QVGA resolution image. This mode decrease pixel rate one half. The resolution default value is 320x240 and can be programmable. Every line only output one half data. For Interlaced Mode, all field line output (320), for Progressive Scan Mode, only one half line data output.The digital video port also offer RGB Raw Data 16 Bit/8 Bit format. The output sequence is matched to OV7620 Color Filter Pattern, that is UV channel output sequence is G R G R ..., Y Channel output sequence is B G B G,....To 8 Bit RGB Raw data output format, just use Y channel and disable UV channel, output sequence is B G R G ....OV7620 support CCIR656 YCrCb 4:2:2 digital output format. The SAV(Start of Active Video) and EAV(End of Active Video) is just at the beginning and the end of HREF window. So the position of SAV and EAV is changing with active pixel window. Also you can get 8 bit RGB raw data with SAV and EAV information.OV7620 support some flexible YUV output format. One is standard YUV 4:2:2. Another is U V sequence swap format, that means UV channel output V U V U ...(16 Bit) and V Y U Y ...(8 Bit). The 3rd format is Y/UV sequence swap in 8 Bit output, that is Y U Y V ....OV7620 can be use as black&white camera. At this mode, it’s vertical resolution will be higher than color mode. All data will be output from Y port and UV port will be tri-state. Data (Y/RGB) output rate is same as 16 Bit mode.OV7620 can be programmable to swap Y/UV or RGB output byte MSB and LSB. Y7 - Y0 default sequence is Y7 is MSB and Y0 is LSB. When swap, Y7 is LSB and Y0 is MSB, relative middle bits are swapped.An important factor about digital camera is how convenient the interface is, OV7620 has made the frame rate programmable and the A/D synchronous to the actual pixel rate. Essentially, it is a whole image capture system in a single chip. Since the internal AEC has a range of 1:260, and AGC have 24dB, for the most of applications, the camera can adjust itself to meet the lighting condition without user intervention.OV7620 support hardware/software RESET function: when RESET pin tie to high, whole chip will be reset including all register. Hardware sleeping mode: when PWDN tie to high, chip clock will be stop and internal circuit reset except all SCCB register. Also there is a SCCB control soft-ware reset control register 12 bit 7, which is same as hardware RESET pin function.OV7620 hardware reset time minimum is 1 ms.OV7620 support hardware/software power saving mode. When the PWDN pin tie to high, whole chip will be set to power down status without any current consumption. For software power down control, all current set to zero except crystal circuit. In power down mode, all SCCB register value will be kept.Two control mechanism have been built into OV7620: A. one time read-in of pin states at power up or RESET status, including hardware and software reset; B. SCCB interface. Two methods are mutually exclusive, only one is used at a time, selected by pin SBB. Method A has limited access to full chip features.The power up reset method is a one time setting, the setting can not be altered later. The pinsused in the control are shared with the digital video port data bus. At power up, the video port is initially tri-stated, allowing the external pull-up/pull-down resistor to set the default operating con-ditions, 2048 clocks later the video port resumes normal function. The detail of the power up pin control method is explained in the individual pin out section.SCCB interface provides full access to all the features. The detail is in the SCCB register set.1.4 VIDEO FORMATTable 1.1: 4:2:2 16 bit FormatData Bus Pixel Byte SequenceY7Y7Y7Y7Y7Y7Y7Y6Y6Y6Y6Y6Y6Y6Y5Y5Y5Y5Y5Y5Y5Y4Y4Y4Y4Y4Y4Y4Y3Y3Y3Y3Y3Y3Y3Y2Y2Y2Y2Y2Y2Y2Y1Y1Y1Y1Y1Y1Y1Y0Y0Y0Y0Y0Y0Y0UV7U7V7U7V7U7V7UV6U6V6U6V6U6V6UV5U5V5U5V5U5V5UV4U4V4U4V4U4V4UV3U3V3U3V3U3V3UV2U2V2U2V2U2V2UV1U1V1U1V1U1V1UV0U0V0U0V0U0V0Y FRAME012345UV FRAME024Table 1.2: 4:2:2 8 bit FormatData Bus Pixel Byte SequenceY7U7Y7V7Y7U7Y7V7Y7 Y6U6Y6V6Y6U6Y6V6Y6 Y5U5Y5V5Y5U5Y5V5Y5 Y4U4Y4V4Y4U4Y4V4Y4 Y3U3Y3V3Y3U3Y3V3Y3 Y2U2Y2V2Y2U2Y2V2Y2 Y1U1Y1V1Y1U1Y1V1Y1 Y0U0Y0V0Y0U0Y0V0Y0 Y FRAME0123 UV FRAME0 1 2 3FIG 1.2 Pixel Data Bus (YUV Output)Note: Tclk is pixel clock period. When OV7620 system clock is 27MHz, Tclk=74ns for 16 Bit out-put; Tclk=37ns for 8 Bit output. Tsu is HREF set-up time, maximum is 15 ns; Thd is HREF hold time, maximum is 15 ns.Y<7:0>PCLKHREFUV<7:0>1010YY8080U V repeat for all data bytesPixel Data 16 bit TimingY<7:0>PCLKHREFrepeat for all data bytesPixel Data 8 bit TimingU Y V Y 80101080Use PCLK rising edge latch data busUse PCLK rising edge latch data busTsuThdThdTclkTclk10Tsu1.5 RGB Raw Data FormatRGB Raw data output from Y and UV port.UV port output data sequence: G R G R G R ... or B R B R ...(refer to register 28 bit 2)Y port output data sequence: B G B G B G ... or G G G G ...(refer to register 28 bit 2)Array Color Filter Patter is Bayer-PatternTable 1.3:R\C1234.6416426436441B11G12B13G14B G B G2G21R22G23R24G R G R3B31G32B33G34B G B G4G41R42G43R44G R G R5B51G52B53G54B G B G.481B G B G B G B G482G R G R G R G R483B G B G B G B G484G R G R G R G R485B G B G B G B G1.5.1 Interlaced Mode 16 Bit Format (HREF total 242)1.5.1.1 Default mode: In ODD FIELD, 1st HREF output UV channel is 2nd line: G21 R22 G23 R24... and Y channel is Row 1: B11 G12 B13 G14 ... . 2nd HREF output UV channel output 4th line: G41 R42 G43 R44 ... and Y port output 3rd line: B31 G32 B33 G34 ... , so on. Data bus should be latched by PCLK rising edge and related to the exact phys-ical position In Even FIELD, 1st HREF Y channel output B31 G32 B33 G34 ... and UV channel output G21 R22 G23 R24 ...2nd HREF Y channel output B51 G52 B53 G54 ... and UV output G41 R42 G43 R44 ....1.5.1.2 YG mode: In ODD FIELD, 1st HREF Y channel output G21 G12 G23 G14 ... and UV channel is B11 R22 B13 R24 .... 2nd HREF Y channel output G41 G32 G43 G34 ... and UV channel output B31 R42 B33 R44 .... In EVEN FIELD, 1st HREF Y channel output G21 G32 G23 G34 ... and UV channel output B31 R22 B33 R24 ... 2nd HREF channel output G41 G52 G43 G54 ... and UV channel output B51 R42 B53 R44 ...1.5.2 Progressive Scan Mode 16 Bit Format (HREF total 484)1.5.2.3 Default mode: 1st HREF UV channel output unstable data, Y output B11 G12 B13 G14 .... 2nd HREF UV channel output G21 R22 G23 R24 ..., Y output B11 G12 B13 G14 ... 3rd HREF UV channel output G21 R22 G23 R24 ..., Y output B31 G23 B33 G34 .... Every line data output twice.1.5.2.4 YG mode: 1st HREF Y and UV output unstable data. 2nd HREF Y channel output G21 G12 G23 G14 ..., UV output B11 R22 B13 R24 ... 3rd HREF Y is G21 G32 G23 G34 ..., UV channel is B31 R22 B33 R24 ... Every line data out-put twice.1.5.2.5 One line mode: 1st HREF Y channel output B11 G12 B13 G14 ..., 2nd HREF Y channel output G21 R22 G23 R24 ..., so on. UV channel tri-state.1.5.3 Interlaced Mode 8 Bit (242 HREF)1.5.3.6 ODD FIELD: 1st HREF Y channel output B11 G21 R22 G12 ... 2nd HREF Y channel output B31 G41 R42 G32..., so on. PCLK timing is double and use PCLK rising edge latch data bus. UV channel tri-state.1.5.3.7 EVEN FIELD: 1st HREF Y channel output B31 G21 R22 G32 ... 2nd HREF Y channel output B51 G41 R42 G52 ..., so on. PCLK timing is double and data bus should be latched by its rising edge. UV channel tri-state.1.5.4 Progressive Scan Mode 8 Bit (484 HREF)1.5.4.8 1st HREF Y channel output unstable data. 2nd HREF Y channel output B11 G21 R22 G12 ... 2nd HREF Y channel output B31 G21 R22 G32 ..., so on. PCLK timing is double and PCLK rising edge latch data bus. UV chan-nel tri-state. Every line data output twice.RGB raw data timing chart is as follows:FIG 1.3 Pixel Data Bus (RGB Output)Note: Tclk is pixel clock period. When OV7620 system clock is 27MHz, Tclk=74ns for 16 Bit out-put; Tclk=37ns for 8 Bit output. Tsu is HREF set-up time, maximum is 15 ns; Thd is HREF hold time, maximum is 15 ns.UV<7:0>PCLKHREFY<7:0>1010GR1010B G repeat for all data bytesPixel Data 16 bit TimingY<7:0>PCLKHREF1010BBrepeat for all data bytesPixel Data 8 bit Timing10GG10PCLK rising edge latch data busPCLK rising edge latch data busTclkTclkThdThdTsuTsu1.6 ZV Port Interlace TimingThe ZV Port is a single-source uni-directional video bus between a PC Card socket and a VGA controller. The ZV Port complies with CCIR601 timing to allow NTSC decoders to deliver real-time digital video straight into the VGA frame buffer from a PC Card. OV7620 support ZV Port Timing, which output signal can be output to a PC Card directly, then to VGA controller. The tim-ing is as below:FIG 1.4 ZV Port TimingNotes: ZV Port format output signal include:VSYNC : Vertical sync pulse.HREF : Horizontal valid data output window.PCLK : Pixel clock used to clock valid data and CHSYNC into ZV Port. Default frequency is 13.5MHz whenuse 27MHz as system clock. Rising edge of PCLK is used to clock the 16 Bit data.Y<7:0>: 8 Bit luminance data bus..UV<7:0>: 8 Bit chrominance data bus.All Timing Parameters is list in following table.‘VSYNCPCLKY<7:0>UV<7:0>/HREF639640t8t8Even Field 1(FODD=0)Odd Field(FODD=1)t6t7t1t2t3t4Horizontal TimingVSYNCY<7:0>/UV<7:0>Valid Data1 Line TvsTve t5Tline12Table 1.4: ZV Port AC ParameterSymbol Parameter Min.Max.t1PCLK fall timing 4 ns8 nst2PCLK low time30 nst3PCLK rise time 4 ns8 nst4PCLK high time30 nst5PCLK period74 nst6Y/UV/HREF setup time10 nst7Y/UV/HREF hold time20 nst8VSYNC setup/hold time to HREF 1 usNote: In Interlaced Mode, there are Even/Odd field different (t8). When In Progressive Scan Mode, only frame timing same as Even field(t8).After VSYNC falling edge, OV7620 will output black reference level, the line number is Tvs, which is the line number between the 1st HREF rising edge after VSYNC falling edge and 1st valid data CHSYNC rising edge. Then valid data, then black reference, line number is Tve, which is the line number between last valid data CHSYNC rising edge and 1st CHSYNC rising edge after VSYNC rising edge. The black reference output line number is dependent on vertical win-dow setting.When in default setting, Tvs = 14*Tline, which is changed with register register 19<7:0>. If in Interlaced Mode, register 19<7:0> change 1 step, Tvs increase 1 line. If in Progressive Scan Mode, register 19<7:0> step equal to 2 line.When in default setting, Tve = 4*Tline for Odd Field, Tve = 3*Tline for Even Field, which is changed with register register 1A<7:0>. If in Interlaced Mode, register 1A<7:0> change 1 step, Tve increase 1 line. If in Progressive Scan Mode, register 1A<7:0> step equal to 2 line.In Progressive Scan Mode, Tve = 3*Tline and Tvs = 35*Tline.1.7 Interface for External RAM Controller and Micro-controllerOV7620 can be programmed to output single frame data to external RAM. The structure block diagram is as follows:The timing diagram is as follows:OV7620FPGA u-CPUDRAM / SRAMDataAddACK SCCB and InitialSRAM DATAHREF VS AGCEN Tri-StateTri-State。
新手入门摄像头-第三篇:智能车摄像头基础知识扫盲
新手入门摄像头第三篇智能车摄像头基础知识扫盲1 什么是P制,什么是N制当前在智能车竞赛中,我们用到的摄像头,基本只有2种制式P(PAL)制和N(NTSC)制。
PAL制式和NTSC制式有很多区别,其中最主要的两个区别就是P制标准的摄像头,每秒输出25帧图像;N制标准的摄像头,每秒输出30帧图像。
智能车摄像头中的例子:PAL制式摄像头:OV6620、sonyCCD、LG CCD OV5116等NTSC制式摄像头:OV7620、OV7640等2 视频是如何形成的由于人眼看到的图像大于等于24Hz 时人才不会觉得图像闪烁,所以PAL 制式输出的图像是25Hz,每秒钟有25 幅画面,即每秒25 帧;NTSC制式的图像是30Hz,每秒钟有30副画面,即每秒30帧。
不同制式的摄像头,在这种规范下输出,人眼看到的图像也就形成了视频。
3逐行扫描与隔行扫描所谓逐行扫描,即摄像头的像素自左向右、自上而下,一行紧接一行扫描输出(点击查看动态图);而隔行扫描,就是在每行扫描点数不变的前提下,将图像分成2场进行传送,这两场分别称为奇场和偶场。
奇数场传送1、3、l 5、…奇数行;偶数场传送2、4、6、…偶数行(点击查看动态图)。
智能车摄像头中的例子:逐行扫描:OV6620、OV7640等隔行扫描:OV7620等4 什么是消隐信号消隐区的出现,在电视机原理上,是因为电子束结束一行扫描,从一行尾换岱默科技用心服务到另一行头,期间的空闲期,这叫做行消隐信号;同理,从一场尾换到另一场尾,期间也会有空闲期,这叫做场消隐信号。
在上图中,虚线为消隐信号。
DEMOK在多次试验中发现,但凡由于没有同步起来采集到图像消隐区,值大概为0x10 或者0x80,因此在调试中,发现返回大块以上值,便可以认定采集到的为消隐区无效信号。
在了解了以上摄像头的基础知识以后,也为下一篇:《新手入门摄像头第四篇---智能车摄像头时序大剖析》做好了技术铺垫,敬期关注!岱默科技用心服务//--------------------------------------------结束语-----------------------------------------------------// 声明:以上内容作者为DEMOK,水平有限,如有纰漏,恳求指正。
OV7620中文寄存器
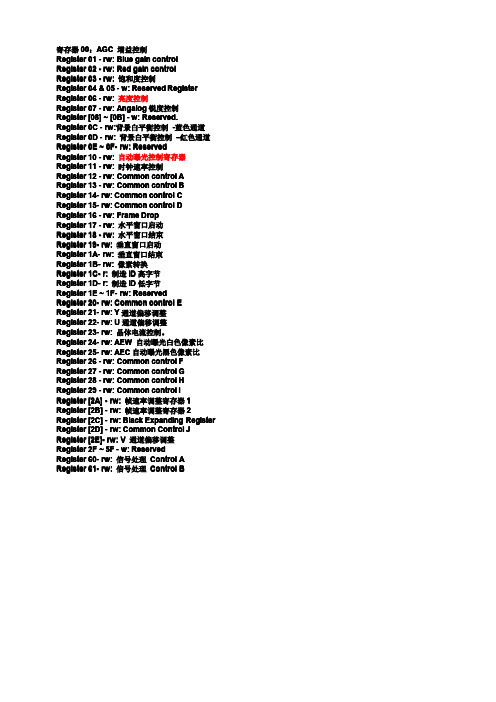
寄存器00:AGC增益控制Register01-rw:Blue gain controlRegister02-rw:Red gain controlRegister03-rw:饱和度控制Register04&05-w:Reserved Register Register06-rw:亮度控制Register07-rw:Angalog锐度控制Register[08]~[0B]-w:Reserved.Register0C-rw:背景白平衡控制-蓝色通道Register0D-rw:背景白平衡控制–红色通道0F--rw:ReservedRegister0E~0FRegister10-rw:自动曝光控制寄存器Register11-rw:时钟速率控制Register12-rw:Common control A Register13-rw:Common control B14--rw:Common control C Register1415--rw:Common control D Register15Register16-rw:Frame DropRegister17-rw:水平窗口启动Register18-rw:水平窗口结束Register19-rw:垂直窗口启动Register1A-rw:垂直窗口结束Register1B-rw:像素转换Register1C-r:制造ID高字节Register1D-r:制造ID低字节1F--rw:ReservedRegister1E~1F20--rw:Common control E Register2021--rw:Y通道偏移调整Register21Register22-rw:U通道偏移调整Register23-rw:晶体电流控制。
Register24-rw:AEW自动曝光白色像素比25--rw:AEC自动曝光黑色像素比Register25Register26-rw:Common control F Register27-rw:Common control G Register28-rw:Common control H Register29-rw:Common control IRegister[2A]-rw:帧速率调整寄存器1 Register[2B]-rw:帧速率调整寄存器2 Register[2C]-rw:Black Expanding Register Register[2D]-rw:Common Control J Register[2E]-rw:V通道偏移调整Register2F~5F-w:ReservedRegister6060--rw:信号处理Control A61--rw:信号处理Control B Register6162--rw:RGB Gamma ControlRegister62Register6363--rw:Reserved64--rw:Y Gamma ControlRegister6465--rw:信号处理Control CRegister6566--rw:AWB过程控制Register6667--rw:颜色空间选择Register6768--rw:信号处理Control DRegister6869--rw:模拟锐度Register696A--rw:垂直边缘增强控制Register6ARegister6B6B--6E rw:ReservedRegister6F-rw:偶/奇噪声补偿控制Register70-rw:Common Control KRegister71-rw:Common Control JRegister72-rw:水平同步第一边移Register73-rw:水平同步第二边移Register74-rw:Common Control MRegister75-rw:Common Control NRegister76-rw:Common Control ORegister77-7B-rw:ReservedRegister7C-rw:Field Average Level Storage寄存器00:AGC增益控制AGC<5:0>-增益设置为整个图像通道计算公式为:Gain=(AGC<3:0>/16+1)*(AGC<4>+1)*(AGC<5>+1);range(1x~7.75x),AGC<5>and AGC<4>control SA2.寄存器3:饱和度控制SAT<7:0>-saturation adjustment(饱和度调整)for the UV channel based on the default setting;80],减少SAT<<7:0>7:0><[<[<[80]范围(-4dB〜+6dB)。
OV6620有关的说明
OV6620有关的说明介绍一下数字摄像头OV6620的特征1)、OV6620需要稳定的5V电压供电,和系统板上的供电电源兼容。
2)、NAL制,每秒25帧,一帧两场,那么每秒就有50场。
意味着20MS就有一幅图像产生。
356x 292 pixels ,理解为:有292行,一行有356个点。
3)、视野和可视距离:这个和镜头的选择有关,f=3.6MM时视野应该有25度左右,f 越大视场.可视距离需要调节镜头对焦.经我测试可视距离可以看十几米,毕竟相素值只有10 万越小多,用单片机读可以看到3-4M的距离.这里解释一下为什么用单片机读会打折扣. 因为黑线宽度只有2.5CM,太远了黑线会很细,采点之后就分辩不出是噪声还是有用信号了. 在1米左右时, 黑线宽度可用8 个点表示.注:以上数据均是24MBUSCL下每行可取150个点时测得,没有翻转摄像头•4)、内部有IIC 可编程.可以调整摄像头的参数,比如最大灰度,对比度,暴光率控制等等. 其本质是SCC助议的寄存器写入,需要对摄像头做跳线处理,并用MCU勺I/O 口模拟SCC眇议.注:SCCB协议视作IIC协议,有些细微的差别•对IIC的写入,本文后面稍加说明• 5)、数据格式-YCrCb 4:2:2, GRB 4:2:2, RGB; 电子曝光/增益/白平衡控制;内部自动图像增强,亮度,对比度,伽马,饱和度,锐度,力卩窗等•最重要的是,不需AD,不需1881。
当然玩一下他的模拟输出一可以,VTO管脚就可以当普通模拟摄像头用.OV6620勺图像采集数字摄像头相对来说贵一些,他内部的信号处理比较复杂,接口也较多,一般是彩色的YUV信号,只取丫的亮度信号,所以用起来略有浪费•先看ov6620datasheet上的时序图:_ 刖帥Field ■切I L J Qtid Fiela:FODC-1)HREFValid DataHorlzontoi TirninnFOTJDHREF高为40u$,低为23uS饥lk为lltaS如果这个图还不明白的话看下面的说明PCLK遷L如果这个图还不明白的话看下面的这个图1、在采集时乎略TCLK首先是因为它太快了,捕捉不到,另外也没有必要捕捉到它。
ov7620介绍
CMOS图像传感器---OV7620图像采集时,为了减小的硬件复杂度,增强模块的独立性,采用HQ7620数字摄像头,它是基于Omnivsion公司的CMOS图像传感器---OV7620的方案设计的。
红树伟业1/3英寸(cmos芯片的大小)数字式CMOS图像传感器OV7620,总有效像素单元为664(水平方向)x492(垂直方向)像素;内置10位双通道A/ D转换器,输出8位图像数据;具有自动增益和自动白平衡控制,能进行亮度、对比度、饱和度、Y校正等多种调节功能;其视频时序产生电路可产生行同步、场同步、混合视频同步等多种同步信号和像素时钟等多种时序信号;5V电源供电,工作时功耗<120mW,待机时功耗<10uW。
能够满足本系统道路识别的要求。
CCD&CMOS:为什么不采用CCD传感器呢?CCD与CMOS传感器是被普遍采用的两种图像传感器,两者都是利用感光二极管(photodiode)进行光电转换,将图像转换为数字数据,而其主要差异是数字数据传送的方式不同。
CCD是采用连续扫描方式,即它只有等到最后一个像素扫描完成后才进行放大;CMOS传感器的每个像素都有一个将电荷放大为电信号的转换器。
所以CMOS的功耗比CCD要小。
由于CMOS功耗小,较CCD要便宜,而且图像质量满足要求。
(总之:CCD传感器在灵敏度、分辨率、噪声控制等方面都优于CMOS传感器,而CMOS传感器则具有低成本、低功耗、以及高整合度的特点。
)二值化传感器&OV7620:场地条件:瓷砖背景黑色赛道,极易受光照影子等光线变化影响,如果采用二值化传感器,只分成10个阈值,虽信息量小,但极易产生误判,本款红树伟业的OV7620模块提供了8个灰度Y的引脚,能识别256个灰度值,选择合适的考虑在分辨灰度的基础上的赛道颜色识别。
基本参数:大小:33x27x24(mm)电源:DC+5V ±5%扫描方式:逐行/隔行扫描最低照度:2.5 lux at f1.4 (3000k)信噪比:> 48 dB最大像素:(H)664 x (V)492;缺省有效像素:(H)640 x (V)480工作时功耗<120mW,待机时功耗<10uW;内置10位双通道A/ D转换器;输出8位图像数据;数据输出格式:YCrCb 16bit/8bit selectable:60Hz 16 Bit YCrCb 4:2:2 - 640x48060Hz 8 Bit YCrCb 4:2:2 - 640x480摄像头主要的采样格式有YCbCr 4:2:2(Y0 U0 Y1 V1 Y2 U2 Y3 V3 )、YCbCr 4:2:0(一行是4:2:0的话,下一行是4:0:2)、YCbCr 4:1:1(水平方向上对色度进行4:1抽样)和 YCbCr 4:4:4(三个分量信息完整)。
ov7620使用手册v1.1
HQ7620摄像头模块使用手册V1.1 2008.12 HQ7620V1.0版2009.1 HQ7620V1.1版重庆飞拓电子网()二〇〇九年一月资料如有更改,恕不另行通知一、模块概述HQ7620摄像头模块是基于Omnivision公司的CMOS图像传感器--- OV7620的方案设计;1/3英寸数字式CMOS图像传感器OV7620,总有效像素单元为664(水平方向)×492(垂直方向)像素;内置10位双通道A/D转换器,输出8位图像数据;具有自动增益和自动白平衡控制,能进行亮度、对比度、饱和度、γ校正等多种调节功能;其视频时序产生电路可产生行同步、场同步、混合视频同步等多种同步信号和像素时钟等多种时序信号;5V 电源供电,工作时功耗<120mW,待机时功耗<10μW。
可应用于数码相机、电脑摄像头、可视电话、第三代网络摄像机、手机、智能型安全系统、汽车倒车雷达、玩具,以及工业、医疗等多种用途。
OV7620是1/3”CMOS彩色/黑白图像传感器。
它支持连续和隔行两种扫描方式,VGA与QVGA两种图像格式;最高像素为664×492,帧速率为30fps;数据格式包括YUV、YCrCb、RGB三种,能够满足一般图像采集系统的要求。
HQ7620模块采用2.00mm双排插针接口,可以通过配送的双端2.00mm排线与其他应用连接(也可采用配送的单端2.54mm排线实现接口连接)HQ7620模块提供VTO测试输出,用户可以使用视频线连接到支持60Hz的电视或者视频卡测试效果。
HQ7620摄像头模块外观:基本参数:大小:33x27x24电源:DC+5V ±5%镜头:规格:1/3”;焦距: 3.6 ;光圈: 2.0 ;视角:92 ;技术参数:扫描方式:逐行/隔行扫描最低照度:2.5 lux at f1.4 (3000k)信噪比:> 48 dB最大像素:(H)664 x (V)492;缺省有效像素:(H)640 x (V)480数据输出格式:YCrCb 16bit/8bit selectable60Hz 16 Bit YCrCb 4:2:2 - 640x48060Hz 8 Bit YCrCb 4:2:2 - 640x480RGB Raw Data Digital Output 16Bit/8Bit selectableCCIR601, CCIR656, ZV 端口:支持8/16 位视频数据SCCB接口:最大速率支持400 kBit/sYCrCB或YUV输出格式:支持TV或监视器显示帧速率:可编程0.5~30fps逐行扫描模式:支持整个画面曝光支持亮度/对比度调节支持软件/硬件复位二、使用说明1、J1输出接口定义:名称属性说明1 SIO-1 I SCCB串行时钟输入2 SIO-0 I O SCCB串行数据3 Frex I 帧曝光控制输入4 CHSync/BW O/I 复合或水平同步信号输出/黑白模式是能输入5 Reset I 复位,高电平有效6 Y0/CBar O/I Y总线输出/Color Bar彩色条测试模式7 Y2/G2X O/I Y总线输出/Gain 2X8 Y1/PROG O/I Y总线输出/逐行扫描模式9 Y4/CS1 O/I Y总线输出/ SCCB从机模式ID配置位10 Y3/RAW O/I Y总线输出/Raw Data11 Y6/CS2 O/I Y总线输出/ SCCB从机模式ID配置位12 Y5/SHARP O/I Y总线输出/使能模拟Sharpness13 PCLK/OUTX2 O/I像素时钟输出/Doubles current output14 Y7/CSO O/I Y总线输出/SCCB从机模式ID配置位15 HRef/VSFram O/I 水平参考输出/垂直帧同步信号16 VSync/CSYS O/I 垂直同步信号/复合同步①信号地17 GND18 GND+5V电源输入19 VCC20 VCC21 UV1/CC656 O/I UV总线输出/CCIR 656模式22 UV0/GAMDis O/I UV总线输出/禁用色度伽玛23 UV3/ECLKO O/I UV总线输出/交换时钟输出②24 UV2/QVGA O/I UV总线输出/QVGA格式(320x240)25 UV5/MIR O/I UV总线输出/镜像26 UV4/SLAEN O/I UV总线输出/使能Slave27 UV7/B8 O/I UV总线输出/ 色度/亮度转换到8位模式③28 UV6/BPCLR O/I UV总线输出/旁路RGB色彩矩阵29 PWDN I PWDN =1 工作在掉电(睡眠)模式30 FODD/SRAM O/I 奇偶场标志/外部SRAM注:①复用为CSYS时,当不使用SCCB模式时,管脚42a(CHSYNC) 通过10k上拉电阻到CSYS;②当复用为ECLKO时,管教17(FODD)连接到XCLK输出;③色度/亮度默认为16位模式;2、J3:FREX输入控制端子;逐行扫描模式下有效;此管脚连接到排阵的pin3,此处保留了0欧接地电阻,如用户需要自己外部控制,可取消或者调整J3电阻。
OV7620 cmos摄像头的使用
OV7620 cmos摄像头的使用
OV7620简介ov7620是一款CMOS摄像头器件,是彩色CMOS型图像采集集成芯片,提供高性能的单一小体积封装,该器件分辨率可以达到640X480,传输速率可以达到30帧。
OV7620是1/3”CMOS彩色/黑白图像传感器。
它支持连续和隔行两种扫描方式,VGA与QVGA两种图像格式;最高像素为664×492,帧速率为30fps;数据格式包括YUV、YCrCb、RGB三种,能够满足一般图像采集系统的要求。
OV7620基本参数大小:33x27x24(mm)
电源:DC+5V±5%
扫描方式:逐行/隔行扫描
最低照度:2.5luxatf1.4(3000k)
信噪比:》48dB
最大像素:(H)664x(V)492;缺省有效像素:(H)640x(V)480
数据输出格式:
YCrCb16bit/8bitselectable
60Hz16BitYCrCb4:2:2-640x480
60Hz8BitYCrCb4:2:2-640x480
RGBRawDataDigitalOutput16Bit/8Bitselectable
CCIR601,CCIR656,ZV端口:支持8/16位视频数据
SCCB接口:最大速率支持400kBit/s
YCrCB或YUV输出格式:支持TV或监视器显示
摄像头工作原理按一定的分辨率,以隔行扫描的方式采集图像上的点,当扫描到某点时,就通过图像传感芯片将该点处图像的灰度转换成与灰度一一对应的电压值,然后将此电压值通过视频信号端输出。
具体而言(参见图5-1),摄像头连续地扫描图像上的一行,则输。
OV7620摄像头模块 数字摄像头

OV7620摄像头模块数字摄像头使用采集卡的测试:1)所需的模块采集卡供电2)详细连接线采集卡的运用过程:1)在桌面上找到下面的软件双击运行2)观察下面窗口的图像3)焦距的调节使用采集卡测试过程中要注意观察画面上是否有黑点,条纹,水滴,灰尘等细节。
上位机测试:所需模块:X128的烧写器CH340X128接线:S0(单片机上的RXD) -----> 串口模块TXDS1(单片机上的TXD) -----> 串口模块RXDGND(单片机上的地) -----> 串口模块GND //如果单片机和串口使用不同电源,也需要共地A0-A7 -----------------> 摄像头模块(数据)Y0 - Y7T0 -----------------> 摄像头模块(行中断)HREFT1 -----------------> 摄像头模块(场中断)VSYN详细接线图片:程序烧写的连接图程序在:胡良工作资料\测试程序\OV7620摄像头9SXS128例程详细步骤:1)在桌面找到下图图标双击打开;2)找到下图双击打开测试程序3)找到下图双击打开(OV7620摄像头9SXS128例程)4)找到下图双击打开Project.mcp5)按下图标注的序列号依次点击6)烧写过程1.2.3.4.关闭上面的那个窗口。
7)上位机的使用(在第3步后可以看到下图。
即TSL1401 9SXS128例程(线性CCD)文件下)1.2.3.4.5.6.观看窗口1和窗口2 的图像变化看最终二值化后的图片边沿是否干净。
如果没有什么干扰点则该模块的性能很好。
国外开源的OV7620使用报告

Digital Project Digital Camera Interface I˜n aki Navarro OizaMay2004AbstractThis document describes the development of a prototype of an interface between a CMOS camera and a computer.This interface allows a user to get images from the camera,to change some of the properties of the camera as brightness, luminance,etc.In addition some image process is implemented allowing the camera to track white objects and follow them with a servomotor.The interface was implemented using the Atmel AVR ATmega16microcontroller.This document is afinal report of the course Digital Project of LTH(Lunds Tekniska hogskola)Sweden.This report and information related to this project can be found in /inaki/dproject1Contents1Introduction31.1Background (3)1.2Specifications (3)2Description of the system52.1The C3088Camera (5)2.2Hardware (7)2.2.1Reset and Clock (7)2.2.2JTAG ICE (7)2.2.3LED and switch (7)2.2.4Serial communications (9)2.2.5C3088Camera (9)2.2.6Servo (10)2.2.7Comments (10)2.3Software (10)2.3.1Serial Communications (10)2.3.2I2C Communication with the camera (11)2.3.3BMP (12)2.3.4Getting Image from the Camera (13)2.3.5Little Image”Process” (13)2.3.6Servo (14)2.3.7Main (15)3Results163.1Conclusions (20)A Schematic21B Images23C Photos of the system292Chapter1Introduction1.1BackgroundFor the last four years I have been designing and building mobile robots based in microcontrollers.In this course on Digital Project I wanted to do something about robotics,but developing a robot would have been very expensive and hard in the mechanical aspects.I decided to work with something related with robotics but cheaper and in someway easier:the interface with a digital camera that later I could add to one of my robots.I own a the digital camera C3088[1].This camera is used in the CMUcam[2] interface to take images,process them and extract some interesting features that can be used by a robot.My idea was to reproduce the similar characteristics of the CMUcam using the C3088camera.I wanted that my interface would be able to get images from the camera,change the different settings of the camera (luminance,brightness,etc.),and if possible make some processing of the image (like detecting colors or lines),in a similar way as the CMUcam does.Also I had the opportunity to use the AVR ATmega16[3]microcontoller and learn about it.I decided to work with it despite it was thefirst time it was used in the course.1.2SpecificationsThe aim of the project is the design and construction of an interface between the CMOS camera c3088and a computer,using the AVR microcontroller.The informationflows in two ways:on the one hand there are commands from the computer to the camera to change different characteristics of it,on the other images from the camera should be sent to the computer.The communication between the computer and the AVR is through the serial port.The communi-cation between the camera and the microcontroller is:using the I2C protocol3to access to the different registers of the camera;and using an8bit port to read the images.In addition the camera will be connected to a TV with its analog output for debugging purpose.In the next diagram of Figure1.1we can see the main blocks of the design and how informationflows.Figure1.1:Blocks and informationflow.The proposed tasks for the project are the next:•Make the AVR ATmega16and its environment work•Communicate the AVR ATmega16with the computer•Make the camera work and see images in the TV•Read and write the registers of the camera using the I2C protocol•Read a line from the camera and send it to the computer•Read a whole image from the camera and send it to the computer.•Make a little process of the image inside the AVR and send the result to the computer(If there is time and it is possible)4Chapter2Description of the system2.1The C3088CameraThe C3088is the camera used in the project and it is the main part of it,that is the reason that a short explanation is made.It is a color camera module with digital output.It uses a CMOS image sensor OV6620[4]from Omnivision[5]. It has a digital video port that supplies a continuous8/16bit-wide image data stream.All the camera functions,such as exposure,gamma,gain,white balance, windowing,can be changed through I2C interface by writing in some registers.The video output can be expressed in different formats,and with different type of channels(RGB,UVY).The format used in the project is the simplest one:Zoom Video Port Format.In this format8bits represent the intensity(Y channel)of one pixel,the other8bits represent the U and V channels,but are not used.The information is sent continuously and is synchronized by the HREF,VSYNC and PCLK signals as showed in the next graph in Figure2.1. The VSYNC signal indicates new frame,the HREF signal indicates when the information is valid and makes the horizontal synchronization,and PCLK is the clock signal(the data is valid in the rising edge).The period of PCLK can be changed by writing in the registers of the camera.This will allow to read images from the camera directly with the microcontroller without the use of additional hardware.The registers accessed by the I2C bus are80and as it was said above allow to change different properties of the camera.In this project they are used to change the period of PCLK,to read the size of the image,to make a mirror of the image,and to reset the camera.It is important here to make a small clarification about the I2C protocol in the camera.The datasheet of the C3088 camera says that the bus used is I2C,but nothing says about the registers and the addresses that should be used.So it is necessary to read the datasheet of the OV6620chip.There you canfind that the protocol used for the communication is not I2C,it is SCCB[6].If you read the specifications of this protocol you can see that it is for some modes the same as I2C protocol.The ID address of the5Figure2.1:Output signals from the C3088.camera is0xC0for writing and0xC1for reading,as is said in the datasheet of the OV6620.The pins of the camera are the next:•Y0Y7Digital output Y Bus.•UV0-UV7Digital output UV bus.(Not used)•PWDN Power down mode and RST Reset•SDA I2C Serial data and SCL I2C Serial clock input(For the I2C com-munication)•FODD Odd Fieldflag(Not used)•AGND Analog Ground,GND Common ground and VCC Power Supply 5VDC•HREF Horizontal window reference output,VSYN Vertical Sync output and PCLK Pixel clock output(For synchronization when getting the im-ages)•EXCLK External Clock input(not used)•VTO Video Analog Output(To get images from the TV)62.2HardwareThe different modules of the design are explained in this section.The only voltage used is Vcc=5V.In Appendix A.1a complete schematic can be found.2.2.1Reset and ClockA typical reset circuit is used with a pull-up resistor of10Kohms and a switch to ground.Also the reset pin is connected to the JTAG connector for the JTAG ICE[7][3].A crystal of16MHz is connected between the XTAL1and XTAL2 pins,also two capacitors of20pF are connected between those pins and ground. This circuits can be seen in Figure2.2Figure2.2:Reset and clock circuit.2.2.2JTAG ICEThe pins PC2,PC3,PC4and PC5are connected to the JTAG ICE connector and also to a pull-up resistor of10Kohm.RESET,GND and VCC are also in this connector that allow us to program the microcontroller.We can see it in Figure2.32.2.3LED and switchIn order to do some tests and debug,a LED was connected between PD7and ground through a resistor of200ohms.Also a switch was connected to PD6 with a pull up resistor of10Kohm,as it can be seen in the Figure2.47Figure2.3:JTAG ICE connector.Figure2.4:LED and switch circuit.82.2.4Serial communicationsThe connection to the serial port of the computer is made using the integrated circuit MAX232[8],because the TTL levels of the microcontroller are not com-patible with the computer.PD0(RXD)and PD1(TXD)are connected to the MAX232as it can be seen in the Figure2.5The TX and RX pins of the MAX232 with RS232levels are connected to the computer through a DB9connector.The capacitors of the circuit are of1uF.Figure2.5:Serial Communication circuit2.2.5C3088CameraThe camera operation voltage is as the rest of the circuits5V,and pins20and 22that are VCC are connected to it.Pin31is GND and pins21and15are AGND(analog ground)and all of them are connected to the common ground. The pins PWDN and RST are connected to ground,so all the resets of the camera are performed by software.The bus Y0-Y7of the camera is connected to the port A(PA0-PA7).PCLK is connected to PD2,HREF to PD3and VSYNC to PD4.The bus UV is not connected because it is not used.SDA and SCL(I2C bus)from the camera are connected to PC1and PC0in the microcontroller,because these pins are connected to the TWI hardware that is used to implement the I2C protocol. VTO pin that is the Video Analog Output is connected to the TV through a9RCA connector.Pins FODD and EXCLK are unconnected.In Figure A.1in Appendix A all these connections can be found.2.2.6ServoTo demonstrate a small image process performed with the microcontroller a servo motor is connected and controlled by the AVR.It is connected to pin PD5,because this pin is connected to the comparator of the counter1,that is used to give the position of the servo.Vcc and ground are also present in the connector of the servo.2.2.7CommentsThe election of which part was connected to which pin was easy.The JTAG should be connected to pins PC2-PC5,because is required by the microcon-troller.The I2C bus was implemented using the help of the TWI hardware of the microcontroller,so it should be connected to pins PCO and PC1.The hardware serial port is in pin PD0and PD1so that is why these pins were used. For the connection of Y bus of the camera one complete port should be chosen. Ports C and D could not be chosen because they were used for other things. Port A was chosen because the only peripheral that it has is the AD converter and it is not required in this project.PCLK,HREF,VSYN,the servo,the LED and the switch were connected to pins of port D.Port B remains completely free.If in a future we want to use the UV bus to get color images from the camera,it can be connected to the port B of the AVR.Pins PC6and PC7are also free.2.3SoftwareAll the software of the project was implemented in C.The different parts of the software are explained in this section.In the web page /inaki/dproject the code of the project can be found.2.3.1Serial CommunicationsThe communications with the computer via serial port was thefirst thing to be implemented because it allows to debug by printing messages in the com-puter.In the computer side two text terminals were used:Hyperterminal[9] of Windows and RealTerm[10]of the open source community.The serial port settings implemented are the next:115200bps,8bits,1stop bit,0parity bits.A velocity of230400bps could have been implemented in the microcontroller, but the computer can not work with it.10Because code for the serial port is widely used,the code used was based in the library Atmel AVR USART Library for GCC[11].The functions from the library were modified tofit the necessities of this project.These functions implement a receiving buffer:the received bytes are read by an interruption and saved in the buffer.This is the only interruption used in the system.To send bytes there is no buffer and the sending functions are blocking.We can find this functions in USART.H and USART.C.2.3.2I2C Communication with the cameraThe I2C[12]bus is a communication protocol developed by Philips.In this protocol two pins are used,one is the clock and the other is the data.Also this protocol has a Master-Slave architecture.In our case the master is the AVR and the slave the C3088camera.Registers of the camera can be read or written by the AVR.In the writing operation the master put in the bus the writing address of device,and after that put the address of the register it wants to write,andfinally the byte it wants to write in the register.The reading operation is similar:first the master put in the bus the writing address of the device it wants to write,after that the the register address to read from,and then the device reading address.Finally the slave puts in the bus the data requested.The I2C communication was the most difficult part of the project,because of two main reasons.First of all because I2C protocol is not implemented hardware in the microcontoller used.Second because,as it was said in2.1,the C3088camera implements the SCCB protocol that it is almost the same as I2C. Three solutions were though to implement the I2C bus:e a parallel to I2C hardware converter like PCF8584[13].This wasrejected because it will use at least10of the pins of the microcontroller and it will not make the software much easier.2.Implement by software directly all the protocol.e the TWI(Two Wire Interface)present in the ATmega16,that is a syn-chronous bus as the I2C,and that used with some changes can implement the I2C protocol.The last solution was the one chosen.As in the case of the usart,a library[11] found in Internet was used.To test this library another I2C device was con-nected to the I2C bus.Once readings and writings were working in this device, the same operations were tried in the camera.The result was that the writing worked,but not the reading.After some investigations with the oscilloscope the problem was detected and solved,it was a timing problem.The read register and write register functions are implemented in the I2C CAM.H and I2C CAM.C112.3.3BMPTo send the images to the computer the BMP format was chosen.The reason was that after the headers only the data information of each pixel is sent.This will allow us to send the image to the computer at the same time is read from the camera.This is very important because then it is not necessary to store the information in another memory,or write a program that will generate the image in the computer.We send in real time the image ready to be displayed in the computer.The BMPfile has the next structure[14]:•rmation about thefile.14bytes.•Info rmation about the image(size,bits per pixel,type of compression,etc.).40bytes•Palette.It translate each pixel information in its color.•Data.All the pixel data.In our case each byte represent one pixel(its intensity).Figure2.6:BMPfile.Some functions were implemented to create each one of the parts of the bmp file,and can be seen infiles BMP.H and BMP.C.createheader and createin-foheader create each one an array of char with the header data.Both header are send before the image through the serial port making use of the function usart putnumchars.The function sendtable generates and send the palette to12the computer.This palette is not stored because it will take to much memory, so it is sent while generated.The last function related to bmp is senddata,that sends to the computer the Data part of the bmpfile.In this case It sends a an artificial generated image.When getting and image from the camera and send to the computer this function is substituted by sending the data read from the camera.2.3.4Getting Image from the CameraThe Image from the camera is read taking in account the diagram of Figure2.1. Because the initial frequency of PCLK is17.73MHz and the AVR is not fast enough to read each pixel at this frequency two solutions could be taken:•Use additional hardware to read and store the image.•Decrease the frequency of PCLK by writing in the register0x11.This last solution was the one taken.The frequency taken to read the image depends on the way we read the image.If we read the image by horizontal lines we need to put the lowest frequency allowed that it is:69,25KHz.This let us to read one line at the same time that is stored in the memory of the AVR. The other mode we read a vertical line of the image in each frame.In this case a higher frequency of260KHz is used,but we need to read as many frames as vertical lines has an image to get a complete one.In the case of the horizontal lines reading the resulting image is too bright,and that is the reason why the vertical reading is used,even if we need to read as many frames as vertical lines. The horizontal reading is used to read one horizontal line and make a little image process of it.The selection of this frequencies was made experimentally trying to use the highest as possible frequency.When we want to send an image to the computer the headers and the palette are send to the computer and then we proceed to read the image from the camera.We read from thefirst frame thefirst column and send pixel by pixel with the serial port to the computer,after that the second column,and so on until we are done with the whole image.The functions photo and cam portsinit do this work and can be found in CAM.H and CAM.C.2.3.5Little Image”Process”The last aim of the project was to do a little process inside AVR.As an example the detection of the horizontal center of a white object was implemented.The way to do it is the next•An horizontal line is read from the camera and stored in the memory.•We read each one of the pixel from left to right and see if they are brighter than a threshold.13•Then we look for the zone that being brighter that the threshold is bigger and calculate its center.This is implemented in the function getcenter in CAM.H and CAM.C. 2.3.6ServoTo make more visual the getcenter function a servo motor was added to the project to track a white object.A servo motor is a motor with some electronics that is used to set the position of the motor[15].This position is controlled by the width of a periodic pulse as it can be seen in Figure2.7.The period is20ms, and the width of the pulse is between0.3ms(to turn it to the left)and2.3ms (to turn it to the right).This values are not exactly the same for every servo and must be adjusted experimentally.Figure2.7:Control of a servo.To generate this periodic signal the Timer1and its compare output of the ATmega16were used.The mode of operation used was”Mode8PWM,Phase and Frequency Correct”where both period and width can be set independently. To set this mode TCCR1A must be=0x80and TCCR1B=0x12.To get a period of20ms then ICR1=20000.The width is controlled writing in the register OCR1A.The initialization of the servo is made by the function servo init,that sets those registers with the appropriate values.To get a and set the position of the servo we use the functions get servo pos and set servo pos, where the position is given by a value between-900(left)and900(right).The main advantage of using the timer in this mode is that once we set the mode the signal is control generated by hardware and no interruptions are needed.When we want to change the position we only have to call set servo pos that will rewrite a new value in OCR1A.All these functions can be found in SERVO.C and SERVO.H.142.3.7MainThe main function is implemented in MAIN.C and MAIN.H.This function basically initiates the serial communications,the I2C bus to communicate with the camera,and reset the camera by writing in one of its registers.After that it sends a welcome message to the computer that is printed on the screen.Then goes inside an infinite loop that look for commands sent from the computer and acts according to the command received.This is done by the function readline that reads from the serial port until a buffer is full or until a return character is found.Then these characters read are compared with the different commands implemented.If a command is found then the appropriate action is taken(like read a register and print the result,get an image,move the servo,etc.).All the actions taken are done using the functions explained in the above subsections. After this the loop starts again.If the command is incorrect NCK is printed and the loop starts again.15Chapter3ResultsThe best way to see the results obtained is to show how the system works.Once everything is connected and the terminal program in the computer is running we press the reset button and receive in the screen the next message: ....Control Camera Program....Inaki Navarro Oiza(c)2004Type HELP and return for helpAlso on the TV the image from the camera can be seen.If we press HELP and intro we receive the next message:ACKHELP MENU-Commands:RR arg1WR arg1arg2READALLRESETMIRRORONMIRROROOFFPHOTOTESTBMPPANORAMICSERVO arg1SCANMOVESERVOTRACKThis menu shows the different commands implemented in the system.These commands are explained below:16•RR arg1reads the register arg1of the camera.arg1can be expressed in hexadecimal or decimal format.It prints the result in the form:”Register =XX Value=XX”.•WR arg1arg2writes the value arg2in the register arg1of the camera. As in the case of RR,arg1and arg2can be expressed in hexadecimal or decimal format.•READALL reads all the registers of the camera and prints them in the same way as RR does.•RESET resets all the registers of the camera to the preset values.•MIRRORON makes image to be seen as if it were seen through a mirror, this is the left part of the image is seen in the right part and vice versa. This change can be seen both in the TV and in the images sent to the computer.•MIRROROFF makes the image to be seen without the mirror property.•PHOTO sends a BMPfile to the computer containing the image seen through the camera.To read the image with the microcontroller the fre-quency of PCLK is reduced,and for each frame only one column its read. This has as result that an image takes about one minute to be taken and sent at the same time to the computer.This makes that only static images can be taken.The resolution of the image is the resolution of the camera (352x244pixels).We can see in Figure3.1an example image.More im-ages can be seen in Appendix B.To receive the image in the terminal of the computer we should put it in receivingfile mode to store it in afile.•TESTBMP sends a BMP generated by software image to the computer. This image is generated in the microcontroller with few control loops.It can be seen in Figure3.2•PANORAMIC takes a panoramic picture using the servo.Itfirst move the servo to the right position and read the center vertical line of the camera and sends it to the computer.After that it moves about0.1and read another vertical line.It continues like this1901times until it generates a panoramic image of1901x244pixels.We can see in Figure3.3an example of a panoramic image.More panoramic images can be seen in Appendix B. To get a panoramic image takes about10minutes.•SERVO arg1moves the servo to the position given by arg1,where-900 means90to the left,0centered and900means90to the right.•SCAN moves the servo to the left and then slowly to the right and again to the left.It is used only to see how can the servo be moved.•MOVESERVO allows the user to move the servo using the keyboard with the keys P and Q.Pressing space will exit this function.•TRACK will perform a tracking of a white object with black background. The center of the white object is got with the getcenter function and the servo is moved to the right or to the left to make the object be always in17the center.The tracking was tested with a black page with a white line in the middle an it works pretty well.Pressing space will exit this function.Figure3.1:Photo taken with the cameraFigure3.2:Image generated with the AVR18Figure3.3:Panoramic Photo193.1ConclusionsAll the proposed tasks of the project were done.The communication with the computer was done,also the I2C communication with the camera.Images can be read and sent to the computer in real time,with the only disadvantage that it takes a lot of time.In addition small”image process”is implemented by getting the center of a white object.The servo motor was added to the project to show how to track an object using the this information.The servo is also used to get panoramic images.In Appendix C some photos of the system can be seen.20Appendix A SchematicComplete schematic of the system.2122Appendix BImagesSome images taken with the camera and sent to the computer are shown here.Figure B.1:Photo taken with the camera23Figure B.2:Photo taken with the cameraFigure B.3:Photo taken with the camera24Figure B.4:Photo taken with the cameraFigure B.5:Photo taken with the camera25Figure B.6:Photo taken with the cameraFigure B.7:Photo taken with the camera26Figure B.8:Panoramic Photo27Figure B.9:Panoramic Photo28Appendix CPhotos of the system Some photos of the system can be seen here.Figure C.1:c3088camFigure C.2:Electronic board29Figure C.3:Electronic boardFigure C.4:Complete system30Bibliography[1]Datasheet of the C3088Camerahttp://www.roboter-teile.de/datasheets/C3088.pdf[2]Web site of the CMUcam/cmucam/[3]Web site of Atmel with information about AVR ATmega16/[4]Datasheet of the ov6620chip/cc6620.html[5]Web site of Omnivision/[6]Datasheet of the SCCB bus/pdfs/ds note.pdf[7]Datasheet of the JTAG ICE/dyn/resources/prod documents/DOC2475.PDF [8]Web site of Maxim with info of MAX232/[9]Web site of Microsoft with information about Hyperterminal program[10]Web site of the Real Term terminal/[11]Web site of Jaakko Ala-Paavola with libraries for the AVRy.hut.fi/jap/Electronics/AVR/index.html[12]Web site of the I2C bus/buses/i2c/[13]Datasheet of the PCF8584/pip/PCF8584P.html[14]Web page with information about the BMPfile(in French)http://www.progzone.free.fr/graphisme/formats/bmp/bmp.html [15]Web page with information about servomotors(in Spanish)/proyectos/cuadernos/ct3/ct3.html31。
OV6620 OV7620图像采集_SCCB 寄存器
岱默科技 用心服务
岱默科技
图 3 主向从―写‖数据
图 4 主向从―读‖数据
【说明】 : 确认, 即 DATASHEET 里的 ACK, 是指检测到数据发送端置低信号, 即确认的信号必须是 0。不确认即为 1。
图 1 IIC 总线位传输
图 2 IIC 总线数据传输
4.2 OV6620/OV7620 的 SCCB 实现
OV6620/7620 支持单个从设备.,当只有唯一个从设备时, 6620 ID 须置为 0XC0 (写)和 0XC1 (读)。7620 ID 是 0X42(写)和 0X43(读) 。 在写周期中,IIC 总线上的第一个字节是选择单个片内寄存器的子地址,第 三个字节是读写该寄存器的数据。写一个未定义的子地址将被忽略。 在读周期中,IIC 总线上的第一个字节是读写该寄存器的数据,子地址用前 面的。读一个未定义的子地址,返回数据不定。
17 18 19 1A 1B 1C 1D 20
HREFST HREFEND VSTRT VEND PSHFT MIDH MIDL COME
38 EA 03 92 00 7F A2 00
RW RW RW RW RW R R RW
21 22 23 24 25
YOFF UOFF REFC AEW AEB
80 80 04 33 97
岱默科技 用心服务
岱默科技
在写周期里,OV6620/7620 返回确认位,在读周期里,主设备返回确认位, 除非读的数据是最后一个字节。 如果读的数据是最后一个字节,主设备并不返回 确认位,通知从设备读周期可以终止。 每一字节内, 最高位总是先传输。 读/写控制位是第一字节的最低位。 标准 IIC 通信仅需两个管脚:SCL 和 SDA。 SDA 设置成开漏双向端口。 SCL 为高时,SDA 上从高到低的转换表示开始。SCL 为高时,SDA 上从 低到高的转换表示结束。只有主设备可以产生开始/结束信号。 除了以上两种情况外, 协议要求 SDA 在时钟 SCL 位高电平器件保持稳定。 只有当 SCL 为低时每一位才允许改变状态(参见下面图 1 的 IIC 总线位传输 和图 2 的 IIC 总线数据传输)。
ov6620 ov7670 ov7620 各自优点
ov6620与普通模拟摄像头需要9~12V供电不同,OV6620仅需5V供电,因飞思卡尔智能车比赛提供的电池电压是7.2~8.2V,所以用OV6620省去了做升压电路这一环节,仅仅需要做一个5V 供电就可以,可以采用7805芯片或2940芯片,电路简单。
OV6620采用PAL制式(国内的普通电视机制式),每秒25帧,分辨率为356*292,内部集成了AD转换模块和视频分离模块,省去了1881视频分离芯片。
当然,也可以当模拟摄像头来使用,比如调焦时,这时可以将视频信号端接至OV6620的VTO端即可。
OV6620的优点:供电电压低,简化电路;内部集成AD和视频分离模块,简化电路,并且使得采集程序简单,采集质量高;视频信号转换在内部进行,减轻单片机负担。
OV6620共有32个引脚,但我们真正能用到的不多。
我在做智能车时仅仅用到13个引脚,其他引脚并未使用,但是其他学校也有使用其他引脚的。
现在把常用的引脚列出来:Y0~Y7(数据输出端,接单片机IO口)、VSYNC(场中断信号端)、HREF(行中断信号端)、VCC(接5V)、GND(接地)、VTO(接视频采集卡调焦),其他可能会使用到的引脚:PCLK (像素同步信号端)、FODD(奇偶场信号端)。
摄像头的工作原理在这里不在进行说明,但需要说明的是:因为OV6620场中断上升沿时间很短,单片机可能捕捉不到上升沿中断,所以判断OV6620一场是否开始选择使用下降沿判断;行中断使用上升沿判断,而且采集的有效点都是在上升沿范围内,下降沿则表示已经进入行消隐区,此时采集的都是废数据(在使用OV6620采集时都为0X10)。
利用这个可以通过测试判断一行所能采集到的有效点个数。
关于中断触发,行中断(HREF)接单片机的T0口,场中断(VSYNC)接单片机的T1口,保证图像采集不会被打断。
市场上提到可以应用在智能车上的摄像头,多如牛毛。
到底那一款最适合用在智能车上呢,这里DEMOK选取了2款典型的摄像头OV7670与OV7620,从其特性和性能等角度,剖析摄像头的特点,为大家揭开迷雾。
ov6620摄像头使用说明
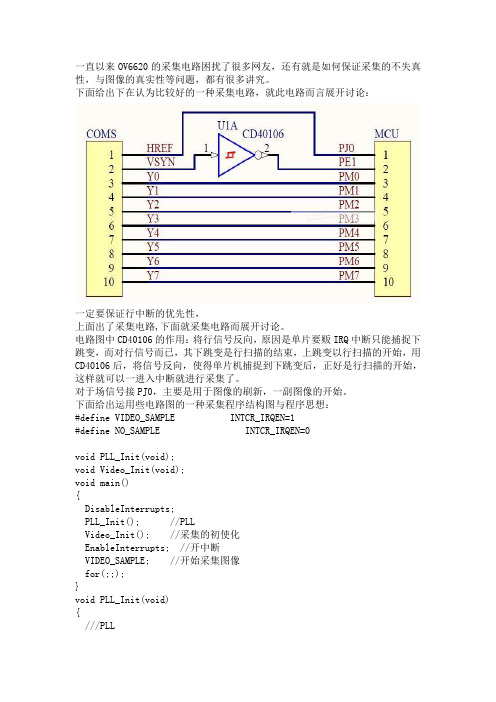
一直以来OV6620的采集电路困扰了很多网友,还有就是如何保证采集的不失真性,与图像的真实性等问题,都有很多讲究。
下面给出下在认为比较好的一种采集电路,就此电路而言展开讨论:一定要保证行中断的优先性,上面出了采集电路,下面就采集电路而展开讨论。
电路图中CD40106的作用:将行信号反向,原因是单片要贩IRQ中断只能捕捉下跳变,而对行信号而已,其下跳变是行扫描的结束,上跳变以行扫描的开始,用CD40106后,将信号反向,使得单片机捕捉到下跳变后,正好是行扫描的开始,这样就可以一进入中断就进行采集了。
对于场信号接PJ0,主要是用于图像的刷新,一副图像的开始。
下面给出运用些电路图的一种采集程序结构图与程序思想:#define VIDEO_SAMPLE INTCR_IRQEN=1#define NO_SAMPLE INTCR_IRQEN=0void PLL_Init(void);void Video_Init(void);void main(){DisableInterrupts;PLL_Init(); //PLLVideo_Init(); //采集的初使化EnableInterrupts; //开中断VIDEO_SAMPLE; //开始采集图像for(;;);}void PLL_Init(void){///PLL}void Video_Init(void){//开行中断,开场中断}#pragma CODE_SEG NON_BANKEDvoid interrupt 6 IRQ_ISR(){//判断是否是采集的行,不是就跳出,//采集}#pragma CODE_SEG DEFAULT_ROM#pragma CODE_SEG NON_BANKEDvoid interrupt x PORTJ_ISR(){//一融图像采集完//图像矩阵清零}#pragma CODE_SEG DEFAULT_ROM当然上述只是很多种采集程序中的一种架构,但是万变不离其中,其目的是一样的,就是图像采集。
ov7620中文资料
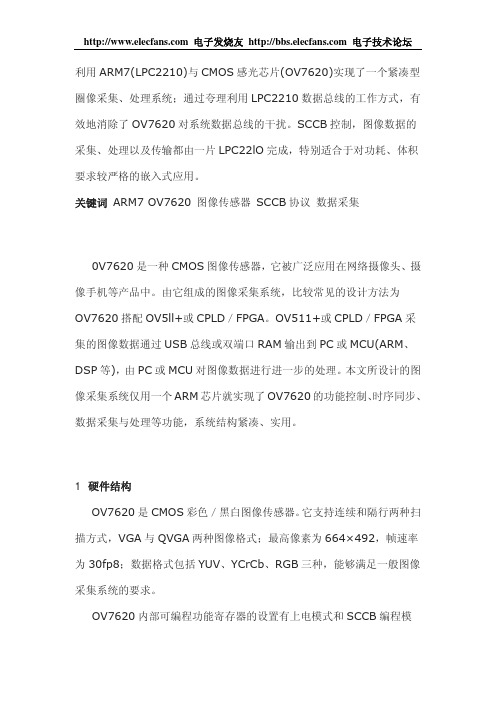
利用ARM7(LPC2210)与CMOS感光芯片(OV7620)实现了一个紧凑型圈像采集、处理系统;通过夸理利用LPC2210数据总线的工作方式,有效地消除了OV7620对系统数据总线的干扰。
SCCB控制,图像数据的采集、处理以及传输都由一片LPC22lO完成,特别适合于对功耗、体积要求较严格的嵌入式应用。
关键词 ARM7 OV7620 图像传感器 SCCB协议数据采集0V7620是一种CMOS图像传感器,它被广泛应用在网络摄像头、摄像手机等产品中。
由它组成的图像采集系统,比较常见的设计方法为OV7620搭配OV5ll+或CPLD/FPGA。
OV511+或CPLD/FPGA采集的图像数据通过USB总线或双端口RAM输出到PC或MCU(ARM、DSP等),由PC或MCU对图像数据进行进一步的处理。
本文所设计的图像采集系统仅用一个ARM芯片就实现了OV7620的功能控制、时序同步、数据采集与处理等功能,系统结构紧凑、实用。
1 硬件结构OV7620是CMOS彩色/黑白图像传感器。
它支持连续和隔行两种扫描方式,VGA与QVGA两种图像格式;最高像素为664×492,帧速率为30fp8;数据格式包括YUV、YCrCb、RGB三种,能够满足一般图像采集系统的要求。
OV7620内部可编程功能寄存器的设置有上电模式和SCCB编程模式。
本系统采用SCCB编程模式,连续扫描,16位RGB数据输出。
系统硬件结构框图如图1所示。
ARM芯片选用具有ARM7TDMI内核的LPC2210,通过LPC2210的GPIO模拟SCCB总线协议,控制OV7620的功能寄存器。
使用LPC2210的3个中断引脚引入OV7620的图像输出同步信号VSYNC、HSYNC、PCLK,以中断方式同步图像数据输出。
OV7620的YUV通道输出的16位并行数据通过LPC2210的高16位数据线接入。
SST39VF160和IS61LV25616AL为扩展的Flash和SRAM,分别用作程序存储器和数据存储器。
OV7620
∙新摄像头独具特色地增加了5V稳压管,有效得防止了电压波动对图像传感器的损害,稳定!∙OV7620采用5V供电,可以很好地和单片机系统板供电电源兼容,无须升压,功耗低!∙OV7620每秒产生30帧图像,每帧两场,1秒钟采集60帧图像,效率高!∙OV7620有效分辨率可达640x480,极大满足了智能车的设计需要,高清晰!∙有效地解决了中心对称的问题,在PCB版设计已经做了较真,中心对称有图有真相!∙摄像头模块面积小,仅有34mm*34mm,不再为你的爱车重心没法降低而烦恼!∙iSmartcar用的是全新原装芯片,芯片全是从马来西亚采购回来的,绝非国内翻新或者散新芯片,请大家擦亮眼睛,杜绝劣质摄像头!【必看】我们这版摄像头引出了智能车可能用的到的所有引脚,所谓真正意义上的智能车专用!引脚有:∙数字信号输出Y[0..7],∙像素中断信号PCLK,∙行中断信号HREF,∙场中断信号VSYN,∙模拟信号输出(用于监控真实图像)VTO,∙SCCB读写引脚SCL、SDA,∙电源引脚VCC、GND第一步:查外观在拿到摄像头以后,首先检查摄像头外观是否完好。
如果有出现在运输过程中造成的挤压,请不要着急,及时与卖家联系沟通;如果没什么问题,直接进行第二步。
第二步:调焦距摄像头的焦距是固定的,安装不同规格(焦距3.6mm,焦距2.8mm 等)的镜头,镜头离芯片镜面距离都是不相等的。
调好焦距的摄像头视野中图像是最清楚的,这样采集回来的赛道数据才会最好,没有调好焦距的摄像头就像是“老花眼”一样,看不清楚赛道,根本是不能去进行下一步的调试。
调焦会用到USB视频采集卡和一根带莲花头的测试线,如下图所示。
调试方法很简单:首先将USB视频采集卡一端插在已安装好软件和驱动的电脑上,视频采集卡的另一端有四个接头,其中黄色视频接口接在测试线的莲花头端;测试线有杜邦线的一端分别接摄像头的VTO和GND,摄像头上电并和采集棒共地,打开软件就能看到图像。
OV6620中文资料
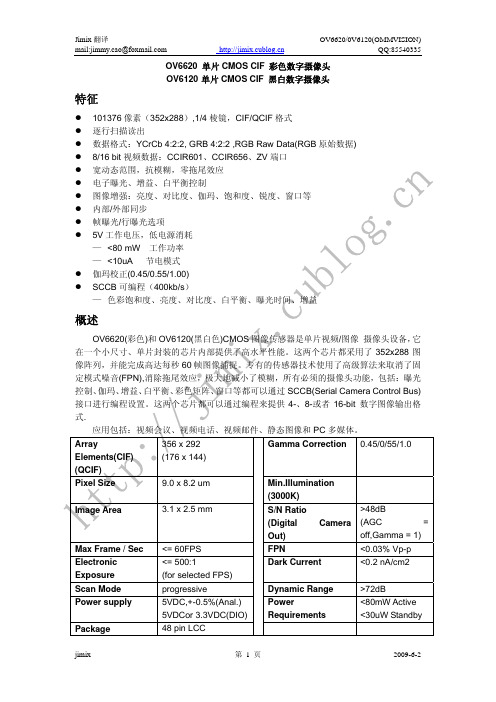
OV6620 单片CMOS CIF 彩色数字摄像头OV6120 单片CMOS CIF 黑白数字摄像头特征z 101376像素(352x288),1/4棱镜,CIF/QCIF 格式z 逐行扫描读出z 数据格式:YCrCb 4:2:2, GRB 4:2:2 ,RGB Raw Data(RGB 原始数据)z 8/16 bit 视频数据:CCIR601、CCIR656、ZV 端口z 宽动态范围,抗模糊,零拖尾效应z 电子曝光、增益、白平衡控制z 图像增强:亮度、对比度、伽玛、饱和度、锐度、窗口等z 内部/外部同步z 帧曝光/行曝光选项z 5V 工作电压,低电源消耗— <80 mW 工作功率— <10uA 节电模式z 伽玛校正(0.45/0.55/1.00)z SCCB 可编程(400kb/s )— 色彩饱和度、亮度、对比度、白平衡、曝光时间、增益概述 OV6620(彩色)和OV6120(黑白色)CMOS 图像传感器是单片视频/图像 摄像头设备,它在一个小尺寸、单片封装的芯片内部提供了高水平性能。
这两个芯片都采用了352x288图像阵列,并能完成高达每秒60帧图像捕捉。
专有的传感器技术使用了高级算法来取消了固定模式噪音(FPN),消除拖尾效应,极大地减小了模糊,所有必须的摄像头功能,包括:曝光控制、伽玛、增益、白平衡、彩色矩阵、窗口等都可以通过SCCB(Serial Camera Control Bus)接口进行编程设置。
这两个芯片都可以通过编程来提供4-、8-或者16-bit 数字图像输出格式.应用包括:视频会议、视频电话、视频邮件、静态图像和PC 多媒体。
ArrayElements(CIF)(QCIF)356 x 292 (176 x 144) Gamma Correction 0.45/0/55/1.0 Pixel Size9.0 x 8.2 um Min.IIlumination (3000K) Image Area 3.1 x 2.5 mm S/N Ratio(Digital CameraOut)>48dB (AGC = off,Gamma = 1) Max Frame / Sec <= 60FPS FPN<0.03% Vp-p Electronic Exposure <= 500:1 (for selected FPS) Dark Current<0.2 nA/cm2 Scan Mode progressive Dynamic Range>72dB Power supply 5VDC,+-0.5%(Anal.) 5VDCor 3.3VDC(DIO)PowerRequirements<80mW Active <30uW Standby Package48 pin LCC管脚图*说明:UV0-UV7输出在0V6120中不可用。
OV6620 OV720摄像头YUV RGB格式说明

1视觉颜色的表示方法(RGB YUV HSI YIQ YcbCr YD6Dr CMY CMYK…)在解释OV摄像头的几种格式之前,有必要简单地介绍一下视频或图像的颜色表示方法。
如果要通过上位机图像采集显示图片,必需熟悉图片的数据储存格式。
如BMP格式是由文件头,信息头,调色板,位图数据构成,因此,如果是在VC 环境下采集图像,必须把数据转化为BMP格式进行内存分配和存储。
TIF,JPG 也是一样的。
值得一提的是VB 和MA TLAB在图像显示方面比VC有很大有优势。
如果不用图像的形式显示储存,在VC里利用CDC在GetClientRect的区域上描点显示也不失一种上位面设计方案;在VB里也可以利用lable控件数组用不同的颜色排列组成可视的图片。
1.1RGB格式RGB 在计算机领域有着举足轻重的地位, 由于色彩显示器使用红、绿、蓝3 色来产生需要的颜色, 所以被广泛用于计算机图形和成像之中。
然而, 在处理现实世界的图像时,RGB 并非很有效, 因为它对所有色彩都用等长像素点的R、G、B 3 色加以合成。
这就使得每个像素在R、G、B 3 个成分上拥有相同的像素深度和显示分辨率。
而且, 处理RGB 色彩空间的图像也不是最有效的。
RGB有一个问题是数据量太大,采集里如果每一个相素都是3个BYTE的数据(R G B),是很没有必要的,于是有人就想去了两个相素点共用一种颜色的算法。
这个算法就是著名的bayer算法的初始。
R感应红光,G感应绿光,B感应蓝光。
在Bayer格式的图像中,图像一半的像素分配给G分量,而R和B分量则占图像的另一半像素。
因为G分量是R、B分量的两倍,所以如果G分量采用好的插值方法,不仅可以提高G 分量的质量,还可以提高R和B分量的质量。
Bayer格式示意图:1.2YUV格式人类的眼睛对低频信号比对高频信号具有更高的敏感度。
事实上,人类的眼睛对明视度的改变也比对色彩的改变要敏感的多。
YUV彩色电视信号传输时,将R、G、B改组成亮度信号和色度信号。
Ov7620的参数,调焦,硬件接法,采集图像,及图像处理
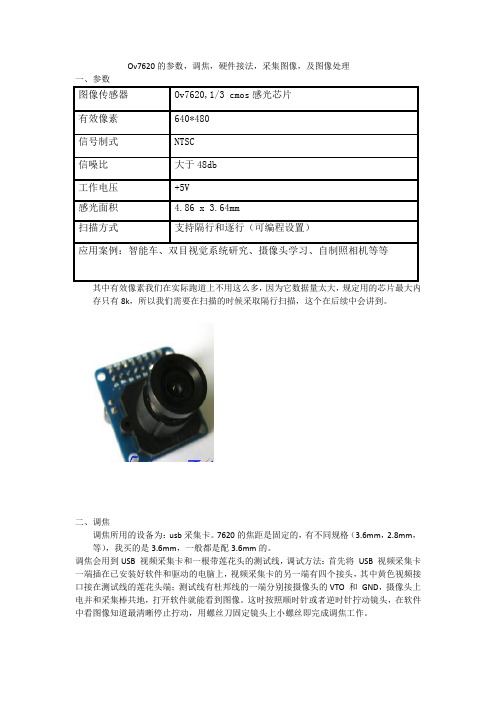
Ov7620的参数,调焦,硬件接法,采集图像,及图像处理一、参数图像传感器Ov7620,1/3 cmos感光芯片有效像素640*480信号制式NTSC信噪比大于48db工作电压+5V感光面积 4.86 x 3.64mm扫描方式支持隔行和逐行(可编程设置)应用案例:智能车、双目视觉系统研究、摄像头学习、自制照相机等等其中有效像素我们在实际跑道上不用这么多,因为它数据量太大,规定用的芯片最大内存只有8k,所以我们需要在扫描的时候采取隔行扫描,这个在后续中会讲到。
二、调焦调焦所用的设备为:usb采集卡。
7620的焦距是固定的,有不同规格(3.6mm,2.8mm,等),我买的是3.6mm,一般都是配3.6mm的。
调焦会用到USB 视频采集卡和一根带莲花头的测试线,调试方法:首先将USB 视频采集卡一端插在已安装好软件和驱动的电脑上,视频采集卡的另一端有四个接头,其中黄色视频接口接在测试线的莲花头端;测试线有杜邦线的一端分别接摄像头的VTO 和GND,摄像头上电并和采集棒共地,打开软件就能看到图像。
这时按照顺时针或者逆时针拧动镜头,在软件中看图像知道最清晰停止拧动,用螺丝刀固定镜头上小螺丝即完成调焦工作。
三、硬件连接上图为调焦用的。
当在采集图像的时候,根据各自的情况选择要的端口。
我在采集图像的时候采用的是href(行中断),vsyn(场中断),和8位xs128芯片的普通I/O口。
四、图像采集由于xs128芯片没有串口接口,所以我采用了usb转串口模块,把电脑上的发送电平转成xs128芯片所识别的ttl电平。
这样就可以让电脑和芯片之间的通信构成连接。
USB转串口使用时仅需三个引脚,分别是GND,TXD,RXD,GND接单片机的GND,TXD接单片机的RXD即P3^0,RXD接单片机的TXD即P3^1(这是51单片机),要是xs128的话,有两对收发口,分别为s0,s1和s2,s3。
硬件部分接好后,就可以打开串口调试助手。
OV6620+FIFO摄像头模组使用详解
OV6620+FIFO模组原理详解1 基本参数板间尺寸:34mmx34mmx30mm(含镜头高)定位孔尺寸:28mm工作电压:DC5V ±5%工作电流:50mA 左右扫描方式:逐行扫描最低照度:2.5 lux at f1.4 (3000k)信噪比:> 48 dB有效像素:(H)352 x (V)288数据输出格式:YCrCb 16bit/8bit selectable60Hz 16 Bit YCrCb 4:2:2 - 640x48060Hz 8 Bit YCrCb 4:2:2 - 640x480RGB Raw Data Digital Output 16Bit/8Bit selectableSCCB 接口:最大速率支持400 kBit/sYUV 输出格式:支持TV 或监视器显示读取方式:MCU 主动读取FIFO 的图像数据2 系统实现方法说明2.1 系统硬件连接图2.2 OV6620 时序分析垂直同步信号VSYN 为两个正脉冲之间扫描一帧的定时,即完整的一帧图像在两个正脉冲之间;水平同步信号HREF 扫描该帧图像中各行像素的定时,即高电平时为扫描一行像素的有效时间;像素同步信号PCLK 为读取有效像素值提供同步信号,高电平时输出有效图像数据,若当前图像窗口大小为352×288,则在VSYNC 两个正脉冲之间有288 个HREF 的正脉冲,即288行;在每个HREF 正脉冲期间有352 个PCLK 正脉冲,即每行352 个像素。
这就是VSYNC、HREF、PCLK 三个同步信号之间的关系。
2.3 图像数据自动存储为了将OV6620 输出的图像信号自动地存入FIFO,只需要通过逻辑门就能产生符合FIFO 要求的写时序,如图所示。
为了将OV6620 输出的图像信号自动地存入FIFO,只需要通过一个“与非门”就能产生符合FIFO 要求的写时序,如图所示。
将帧同步信号VSYN 引入MCU 中断输入口,复位后WE 置0,“与非门”关闭,输出1。