ch14 - 事件驱动编程
ch14 项目沟通协作管理

中文版 Project 2007 实用教程
14.1.4 发布项目中的文档
项目中的文档为项目计划提供了更多的信息,例如各项规章制度,质量评 审标准等,为了让工作组成员更加清楚地认识计划目标和相关规章制度等,可 以发布项目文档.项目文档可以随项目计划作为附近发送,也可以保存到 Exchange公用文件夹中,也可以发布到Project Exchange公用文件夹中,也可以发布到Project Web Access. Access.
中文版 Project 2007 实用教程
14.2 查看和响应任务
发布项目计划后,工作组成员不仅可以查看自己的任务,而且还可以对 项目经理分配的任务做出响应.
中文版 Project 2007 实用教程
14.2.1 查看任务
发布项目计划后,工作组成员需要查看自己的任务以及任务时间等.安装 了Project Professional 2007的成员可以直接查看作为附件发送的项目计划, 2007的成员可以直接查看作为附件发送的项目计划, 或保存到公用文件夹中的项目计划.而没有Project 或保存到公用文件夹中的项目计划.而没有Project Professional 2007的成员 2007的成员 则无法直接打开查看,需要通过Project 则无法直接打开查看,需要通过Project Web Access来查看. Access来查看. 工作组成员通过Project 工作组成员通过Project Web Access只能查看自己的任务,不能查看其他成员 Access只能查看自己的任务,不能查看其他成员 的任务.
中文版 Project 2007 实用教程
14.3.1 将任务更新到项目计划
默认状态下,工作组成员对项目任务更新后,不会保存到Project中,需要 默认状态下,工作组成员对项目任务更新后,不会保存到Project中,需要 经过项目经理核实后,批准任务更新才会将这些信息保存到项目中.当然,工 作组成员认为这些信息不需要经过核实,也可以设置为自动更新. 默认状态下,项目经理需要手动更新工作组成员发出的更新任务,拒绝任 务等信息.
CH14-N243 EMC32 Basics Path Calibration

13 Jan 2010 | EMI RE Test | 1Signal Path CalibrationDouble-click on signal path icon to perform the signal path calibration. The configuration settings interface for signal path would appear as shown above.13 Jan 2010 | EMI RE Test | 2Signal Path Calibration1. Click here in order to add new or existing correction table of the signal pathTable added 5. Click this button to start and configure the calibration setup2. Enter the correction table name or click on to select existing table. 3. Click Add Table button to add a correction table to store the calibration data, Delete Table to delete the correction table.4.2 For signal path in TS-RSP only. Select the correct type of switch unit and path.4.1 Add new pathThe signal path calibration interface allows user to add an existing or new correction table to save its calibrated path. Switching Path is only applicable if the allocated signal path passes through a TS-RSP or automated-control switching unit.13 Jan 2010 | EMI RE Test | 3Signal Path CalibrationEnter the Start and Stop Frequency. The Step mode can be logarithm (Log) mode, or linear (Lin) mode, or Frequency List that created in a table format.13 Jan 2010 | EMI RE Test | 4Signal Path CalibrationClick on the SML03 icon and determine the signal level of the generator in the next pop-up interface13 Jan 2010 | EMI RE Test | 5Signal Path CalibrationClick at the receiver, and select 9kHz for IF Bandwidth and 100ms for measurement time at the Time / Bandwidth tab. Choose Auto-Ranging for ESCI3 and select suitable RF attenuation value for FSP30. Click OK to save the receiver settings and click on Calibrate button to start path calibration.13 Jan 2010 | EMI RE Test | 6Signal Path CalibrationClick Start to begin nomalisation and calibration.13 Jan 2010 | EMI RE Test | 713 Jan 2010 | EMI RE Test | 8Signal Path CalibrationDouble-click on signal path icon or to perform the signal path calibration. The configuration settings interface for signal path would appear as shown above.13 Jan 2010 | EMI RE Test | 9Signal Path Calibration1. Click here in order to add new or existing correction table of the signal path 2. Enter the correction table name or click on to select existing Table added 5. Click this button to start and configure the calibration setup 3. Click Add Table button to add a correction table to store the calibration data, Delete Table to delete the 4.1 Add new pathcorrection table. table.4.2 For signal path in TS-RSP only. Select the correct type of switch unit and path.The signal path calibration interface allows user to add an existing or new correction table to save its calibrated path. Switching Path is only applicable if the allocated signal path passes through a TSRSP or automated-control switching unit.13 Jan 2010 | EMI RE Test | 10Click on the SML03icon and determine the signal level of the generator in the next pop-up interface.There is no configuration setting needed for power meter and sensor NRP channel A and B.However you may want to control the measurement speed or check on the measured value from the power meter by clicking on the Measure button.Default measurement speed:NORMALEnter the Start and Stop Frequency.The Step mode can be logarithm(Log)mode,or linear(Lin) mode,or Frequency List that created in a table format.Check or Click on the box beside“Include Frequency Correction of RF Probe“to include the frequency correction of the power sensor RF probe into the attenuation correction table.Click or Check on this box ONLY if the signal path calibrated is connected to RF probe of the power meter during testing,eg the signal path between NRP Power Sensor Channel A and forward power of the amplifier.1.Select to perform Normlization,Calibration or Both measurementconcurrently.2.Click on Start buttonto perform the selectedmeasurement.3.Autoscale Y is to scale the graphicto the required range of themeasurement.4.Create Report of themeasurement result5.Edit the reportinformation.6.Return to previouswindow or calibrationsettings.Click Start to begin nomalisation and calibration.。
华二数学校本教材Ch14 (定稿)

第十四章 坐标变换、参数方程和极坐标方程(Coordinate transformation , Parametric equation and Polar coordinate equation )曲线的参数方程和极坐标方程是解析几何中两类特定形式的曲线方程,而坐标变换则是简化曲线方程的一个工具。
在本章中,我们将介绍坐标系的平移和和旋转。
让学生能应用坐标变换化简曲线方程并研究其性质;能掌握参数方程和极坐标方程的相关概念与结论. *14.1 坐标轴的平移(Parallel displacement of Coordinate)点的坐标和曲线的方程是相对一定的坐标系来说的.例如,如图圆O '的圆心O ',在坐标系xOy 中的坐标是)1,2(,圆O '的方程是2223)1()2(=-+-y x ;如果取坐标系'''y O x )//,//(''''Oy y O Ox x O ,那么在这个坐标系中,它们就分别为)0,0(和2''322=+y x .定义 坐标轴的方向和长度单位都不改变,只改变原点的位置,这种坐标系的变换叫做坐标轴的平移(Parallel displacement of Coordinate),简称移轴(displacement axis).从上面的例子我们看到,通过坐标系的平移可以使曲线方程简化.有利于研究曲线的性质. 下面研究在平移情况,同一个点在两个不同的坐标系中坐标之间的关系.设O '在原坐标系xOy 中的坐标为),(y x ,即=O O ),(k h ,以O '为原点平移坐标轴,建立新坐标系'''y O x 。
平面内任意一点M 在原坐标系中的坐标为),(y x ,在新坐标系中的坐标为),(''y x ,即=OM ),(y x ,='M O ),(''y x ,由=+'O O ,M O '得 ),(y x =),(k h +),(''y x =),(''k y h x ++, 因此,点M 的原坐标、新坐标之间,有下面的关系:h x x +=', k y y +=1 (1)或者写成 h x x -=', k y y -='(2)公式(1),(2)叫做平移公式(formula of the parallel displacement). 例1 平移坐标轴,把原点平移到)3,2('-O .求:(1)点)3,2(-P 的新坐标;(2)点Q 的新坐标是)2,0(,求Q 的原坐标; (3)曲线036422=-+-+y x y x 在新坐标系下的方程;(4)曲线15422''=+y x 在原坐标系中的方程. 解 (1)把点P 的原坐标分别代入2'-=x x , 3'+=y y ,便得到它的新坐标为: 6,4''=-=y x ,即点P 的新坐标为)6,4(-.(2) 把点Q 的新坐标分别代入2'+=x x , 3'-=y y ,便得到点P 的原坐标为)1,2(-.(3)因为坐标系的改变,曲线上每一点的坐标都相应的改变,所以,曲线的方程也要改变.设曲线上任意一点的新坐标为),(''y x ,那么2'+=x x , 3'-=y y .代入原方程,就得到新方程: 1622''=+y x .(4)将移轴公式2'-=x x , 3'+=y y 代入新方程,得曲线在原坐标系中的方程:15)3(4)2(22=++-y x . 例2 平移坐标轴,化简下列方程:(1) 0422=-+x y x ; (2) 029*******2=--+-y x y x 解 (1)配方得 ,2)2(222=+-y x设 y y x x =-='',2,得曲线的新方程2''222=+y x .(2)把h x x +=', k y y +='代入方程,得029)(54)(16)(9)(4''2'2'=-+-+++-+k y h x k y h x即 029541694)5418()168(9422''''22=--+-++-++-k h k h y k x h y x (1) 令 0168=+h , 05418=+k , 解得 3,2-=-=k h . 代入(1),得新曲线方程19422''=-x y .\ 例3 求下列各曲线的顶点和焦点的坐标、准线方程及双曲线的渐近线方程. (1) 0164363291622=-++-y x y x ;(2) 242+-=x x y . 解 (1) 把原方程左边配方,得144)2(9)1(1622=--+y x ,令 2,1''-=-=y y x x ,则14491622''=-y x . 即116922''=-y x .方程的曲线是双曲线. 5169,4,3=+===c b a .在新坐标系'''y O x 中,顶点坐标是)0,3(),0,3(-,焦点坐标是)0,5(),0,5(-,准线方程是59'±=x ,渐近线方程是''34x y ±=.在原坐标系xOy 中,顶点坐标是)2,2(),2,4(-,焦点坐标是)2,4(),2,6(-,准线方程是514-=x ,和54=x ,渐近线方程是01034=+-y x 和0234=-+y x . (2) 把原方程配方得2)2(2-=+x y .令 2,2''+=-=y y x x ,则''2y x =.方程的曲线是抛物线.21=p . 在新坐标系'''y O x 中,顶点坐标是)0,0(,焦点坐标是)41,0(,准线方程是41'-=y ;在原坐标系xOy 中,顶点坐标是)2,2(-,焦点坐标是)47,2(-,准线方程是49-=y .课堂活动 自己想1. 利用移轴公式化简曲线方程通常有配方法和待定系数法,它们各有什么优势与不足?2. 利用移轴公式将二次曲线0),(22=+++++=F Ey Dx Cy Bxy Ax y x f 化简后,其二次项系,一次项系数和常数项有何变化?最简表达式可化为怎样的形式? 习题练习 自己练1. 平移坐标轴,把原点移到'O ,求下列各曲线的新方程,并画出新坐标轴和图形.(1) 4=x , )3,2('O ; (2) 532=-y x , )2,1('O ;(3) 02422=-++y x y x , )1,2('-O ; (4) 0322=+-+y x x , )2,1('-O .2.平移坐标轴化简方程:(1) 036422=-+-+y x y x ; (2) 0564222=-+-+y x y x ; (3) 01636169422=+-+-y x y x ; (4) 024662=++-x y y . 3.求下列曲线的焦点坐标和对称轴方程(1) 0742222=--++y x y x ; (2) 0848422=-+--y x y x ;(3) 0482=+-y x x .4.已知双曲线两顶点的坐标是)1,2(和)5,2(-,虚轴长为8,求双曲线的方程.5.椭圆124)2(22=++y x 的中心在直线063=+-y x 上滑动,且保持对称轴平行移动,求中心滑到什么位置时,椭圆与直线06=-+y x 相交所得的弦长为324.6.已知双曲线m y x y x =---1889422的焦距为10,求m 的值.7.已知ABC ∆的两个顶点B A ,是椭圆15)1(13)2(2222=++-y x 的两个焦点,顶点C 在抛物线12+=x y 移动.求ABC ∆的重心轨迹方程.14.2 坐标轴的旋转变换(Rotation Mapping of the Coordinate System)我们已经学过坐标轴的平移,现在来讨论坐标轴旋转时,同一点的坐标间的关系.如果坐标轴的原点和长度单位都不变,只是坐标轴按同一方向绕原点旋转同一角度,这种坐标系的变换叫做坐标轴的旋转(rotation of the coordinate axes),简称转轴(rotation of axes). 下面来求转轴时的坐标变换公式. 设坐标轴旋转角为θ.如图,设21,e e 分别是x 轴,y 轴的单位正向量,'2'1,e e 分别是'x 轴、'y 的单位正向量,则有 θθθθs i n c o s )s i n ,(c o s 21'1e e e +== θθπθπθsin cos ))2sin(),2(cos(21'2e e e +-=++=. (1)在平面内任取一点M,它在坐标系xOy 和'''y O x 中的坐标分别为),(y x 和),(''y x ,即21e y e x OM +=, '2''1'e y e x OM += (2) 将(1)式代入(2)式得 2''1''21)c o s s i n ()s i n c o s (e y x e y x e y e x θθθθ-+-=+,从而可以得到⎪⎩⎪⎨⎧+=-=.cos sin ,sin cos ''''θθθθy x y y x x (3) 由(3)解出'',y x ,得⎪⎩⎪⎨⎧+-=+=.cos sin ,sin cos ''θθθθy x y y x x (4)公式(3)是用新坐标表示原坐标的旋转变换公式,公式(4)是用原坐标表示新坐标的旋转变换公式,统称旋转(转轴)公式(rotation formula of axes).公式(4)也可在(3)中以θ-代替θ来得到.公式(3),(4)还可用矩阵形式写成:⎝⎛=⎪⎪⎭⎫ ⎝⎛θθs i n c o s y x ⎪⎪⎭⎫-θθc o s s i n ⎪⎪⎭⎫⎝⎛''y x , ('3) ⎝⎛-=⎪⎪⎭⎫ ⎝⎛θθs i n c o s ''y x⎪⎪⎭⎫θθc o s s i n ⎪⎪⎭⎫ ⎝⎛y x . ('4)例1. 把坐标轴旋转3π,求点)1,3(-P 在新坐标系中的坐标. 解: 把3πθ=代入公式(4),得⎪⎪⎩⎪⎪⎨⎧=⋅+⋅--==⋅+⋅-=.23cos 13sin )3(,03sin 13cos 3''ππππy x点P 在新坐标系中的坐标是)2,0(.例2.将坐标轴旋转4π,求曲线22a xy =在新坐标系中的方程,并画图.解: 把4πθ=代入公式(3),得''''22224sin4cosy x y x x -=-=ππ, ''''22224cos4siny x y x y +=+=ππ代入方程,得新坐标系的方程 22'2'a y x =+.它是一条等轴双曲线,其图形如右图所示.从上例可以看出,把坐标轴旋转一个适当的角度,可以简化二元二次方程 )0(022≠=+++++B F Ey Dx Cy Bxy Ax (5)使新方程没有''y x 项.如何选择旋转角呢?下面我们利用旋转公式(3)来研究这个问题. 将公式(3):⎪⎩⎪⎨⎧+=-=.c o s s i n,s i n c o s ''''θθθθy x y y x x 代入方程(5),可得0'''''2'''''2''=+++++F y E x D y C y x B x A , (5')其中 θθθθ22'sin cos sin cos C B A A ++=,θθθθθθcos sin 2)sin (cos cos sin 222'C B A B +-+-=,θθθθ22'cos cos sin sin C B A C +-=,θθsin cos 'E D D +=, θθc o s s i n 'E D E +-=.为了使,0'=B 则得 θθ2sin )(2cos C A B -=,只要取θ满足下式就可以了: BCA -=θ2c o t (6) 取满足公式(6)的角θ,作旋转变换,就可以使方程(5')中没有''y x 项.由于旋转公式里只用到θsin 和θcos 的值,所以可以由下列三角恒等式来计算θsin ,θcos .例3 利用坐标轴的旋转化简方程:,103222=+-y xy x 并画出它的图形.解: 333122cot -=--=θ, 得⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=-==+=-=+-=.2122/11cos ,2322/11sin 213/113/32cos θθθ因此旋转公式是23''y x x -=, 23''y x y +=. 代入原方程, 化简得,标准方程是 14202'2'=+y x . 它是一个椭圆,画出图形如图所示. 课堂活动 自己想.1. 化简二元二次方程 022=+++++F Ey Dx Cy Bxy Ax 通常有哪些步骤?2. 通过坐标轴的旋转化简二元二次方程(5)为方程(5'),其二次项系数与常数项变化有何特征? 习题练习·自己练 1. 设旋转角4πθ-=,求新坐标系中的两点)0,2(),2,3(B A -在原坐标系中的坐标.2. 设旋转角6πθ=,求原坐标系中的两点)2,0(),1,2(D C -在新坐标系中的坐标.3. 按所给的角θ旋转坐标轴,变换下列各方程:(1) 0=+y x , )4(πθ=; (2) 02=-y x , )2(πθ-=; (3) 422=+y x , )6(πθ=; (4) 833222=+-y xy x , )3(πθ-=. 4. 利用坐标轴的旋转,化简下列方程,使其不含''y x 项.(1) 02222222=+-++y x y xy x ; (2) 02254222=-++y xy x ;(3) 16422=++y xy x ; (4) 144313102122=+-y xy x .5. 设225323),(y xy x y x f +-=.(1)求旋转角θ,使),(y x f 化简后不含''y x 项; (2)作出24),(=y x f 在xOy 平面上的图象; (3)对)0,0(),(≠y x f ,求22),(),(yx y x f y x g +=的最大值和最小值. 14.3 曲线的参数方程(Parametric Equation of a Curve)前面我们所研究过的曲线方程0),(=y x F ,都是表示曲线上任意一点y x ,之间的直接关系的.但是在解决某些问题时,对于曲线上任意点),(y x M ,它们的坐标y x 与的直接关系往往不容易发现,而通过第三个变数间接地表示y x ,之间的关系却比较方便.下面我们看一个例子.设炮弹的发射角为α,发射初速度为0v ,求弹道曲线的方程(不计空气阻力).取炮口为原点,水平方向为x 轴,建立直角坐标系(如图),设炮弹发射后的位置在点),(y x M.可以看出,点M 运动的特征难以用y x ,之间的直接关系表达出来,但是点),(y x M 的位置明显地被炮弹飞行的时间t 所确定.事实上,由物理学知识可知,此时炮弹在Ox 方向上是以αcos 0v 为初速度作匀速直线运动,在方向上是以αsin 0v 为初速度作竖直上抛物运动.于是 ⎪⎩⎪⎨⎧-⋅=⋅=.21s i n ,c o s 200gt t v y t v x αα(1)其中g 是重力加速度(取9.8米/秒2).当t 取定某个允许值时,由方程组(1)就可以唯一地确定此刻炮弹的确切位置.如上,这种通过引入一个辅助变量t ,间接地建立y x ,之间的关系的做法,不仅十分自然,而且具有实际意义.如,方程组(1)中的两个方程就分别反映了炮弹的水平距离、高度和时间的关系.由此可见;方程组(1)实际上表示出了炮弹运行的弹道曲线.一般地,在平面直角坐标系中,如果曲线C 上任意一点的坐标y x ,都是第三个变量t 的函数 ⎩⎨⎧==),(),(t g y t f x )(D t ∈ (2)并且对于t 的每一个允许值,由方程组(2)所确定的点),(y x M 都在曲线C 上,那么方程组(2)就叫做曲线C 的参数方程(parametric equation), t 叫做参变数(parametric),简称参数.相对于参数方程来说,前面学过的直接给出曲线上点的坐标y x ,间关系的方程0),(=y x F 叫做曲线的普通方程.求曲线的参数方程时,关健是选择恰当的参数. 例1 写出经过定点)3,2(P ,且倾斜角为32π的直线l 的参数方程. 解 因为直线l 的倾斜角为32π,而)23,21()32sin ,32(cos -=ππ,所以)3,1(-=是l 的一个方向向量. 又因为直线l 经过点)3,2(P ,所以直线l 的点方向式方程为3312-=--y x . 设比值为t ,得直线l 的参数方程为⎩⎨⎧+=-=.33,2t y t x )(R t ∈.参数方程和普通方程是直角坐标系下曲线方程的不同表示形式,它们都是表示曲线上点的坐标之间关系的.一般情况下,我们可以通过消去参数方程中的参数,得出曲线的普通方程;也可以选择一个参数将普通方程变成参数方程的形式.例2 把弹道曲线的参数方程⎪⎩⎪⎨⎧-⋅==.21sin ,cos 200gt t t v y t v x αα )4()3( 化为普通方程.解 由(3)消去参数t ,得普通方程x x v g y αααc o s s i n c o s 22220+-= (g v x α2sin 020≤≤). 这里的g v ,,0α都是确定值.可见炮弹运动的轨迹是抛物线的一部分.曲线的参数方程与普通方程互化时,要注意两种方程中的变量y x ,的取值范围,使化成的普通方程与参数方程等价.例3将下列曲线的参数方程化为普通方程:(1) ⎩⎨⎧-=+=;21,32t y t x (R t ∈) (2)⎩⎨⎧==.2cos ,sin θθy x (3) ⎪⎪⎩⎪⎪⎨⎧++-=--=);1(21),1(31t t y t t x (t 为参数); (4)⎩⎨⎧+=+=.tan sin ,cos 1θθθy x (θ为参数,20πθ<<) 解 (1)由参数方程第一式乘2与第二式乘3相加,得7)21(3)32(232=-++=+t t y x ,因此所求的普通方程为0732=-+y x .(2)将参数方程中的第一个式子代入第二个式子,得2221sin 21x y -=-=θ 由]1,1[sin -∈=θx ,得]1,0[2∈x ,从而 ]1,1[212-∈-=x y . 因此 所求的普通方程为122+-=x y )11(≤≤-x . (3)由题设,得219)1(222-+=-t t x , 214)1(222++=+t t y两式相减,得44)1(9)1(22-=+--y x , 所以这条曲线的普通方程为136)1(16)1(22=--+x y . (4) 因θθθtan tan )cos 1(x y =+=, 即 xy=θtan . 所以 θs i n =-xyy , 又 θc o s 1=-x , 消去参数得 1)1()(22=-+-x xy y , 即 2222)1)((x x y x =-+.由 20πθ<<,得1cos 0<<θ,从而21<<x ,同理0>y . 故所求普通方程为)0,21()1)((2222><<=-+y x x x y x . 例4 将曲线的普通方程4922=+y x 化为参数方程.(1) 设θcos 2=x ; (2)设2+=ty x .解(1)将θcos 2=x 代入4922=+y x ,得θ22sin 49=y ,取)20(sin 32πθθ<≤=y ,故4922=+y x 的参数方程为⎪⎩⎪⎨⎧==.sin 32,cos 2θθy x )20(πθ<≤. (2)将2+=ty x 代入4922=+y x ,得04)9(22=++ty y t ,解得0=y 或294t ty +-=. 对R t ∈将294tty +-=代入2+=ty x ,得 229218t t x +-=. 又 293622≠++-=tx . 故参数方程为 )(949218222R t t t y t t x ∈⎪⎪⎩⎪⎪⎨⎧+-=+-= 和 ⎩⎨⎧=-=02y x 上例表明,同一条曲线的普通方程,因参数选择的不同,其参数方程也不同.习题练习·自己练1. 写出经过定点)2,1(P ,且倾斜角为3π的直线l 的参数方程. 2. 参数方程⎩⎨⎧==.sin 3,cos 3θθy x ]2,0[πθ∈ 与⎩⎨⎧==.sin 3,cos 3θθy x ],0[πθ∈是否表示同一曲线?为什么?3. 一木棒AB 的两端A,B 各在相互垂直的两杆上滑动,且AB=10㎝,求AB 的中点P 的轨迹的参数方程.4. 边长为2的正三角形ABC 的顶点A,B 分别在y 轴,x 轴的正半轴(包括坐标原点)上移动,求顶点C 的轨迹的参数方程(A,B,C 按逆时针方向排列).5. 化下列参数方程为普通方程,并画出图形.(1)⎩⎨⎧-=+=;34,3t y t x )(R t ∈ (2)⎪⎩⎪⎨⎧+=-=;2,22t y t t x )(R t ∈ (3) ⎩⎨⎧-=+=;3sin 3,2cos 5θθy x ))2,0[(πθ∈ (4) ⎪⎪⎩⎪⎪⎨⎧-=+=.21,12t t y tt x )0(≠t6. 根据所给的条件,化下列方程为参数方程(t 和φ是参数).(1)01216422=+-+x y x , φsin 2=y ; (2) 16422=+y x , 4+=tx y ;(3)23232=+yx , φ3cos 22=x ; (4) 422=-y x , tt x 1+=.14.4 直线与圆锥曲线的参数方程(Parametric Equations of Lines and Conic Sections)下面我们进一步来研究直线、圆锥曲线的参数方程及其应用. 1. 直线的参数方程如图,直线l 经过点),(000y x P ,l 的一个方向向量为),(v u =.设),(y x P 是l 上的任意一点,那么由t vy y u x x =-=-00, 得直线l 的参数方程为⎩⎨⎧+=+=.,00vt y y ut x x )(R t ∈如果l 的倾斜角为α,那么l 的一个方向向量为)0)(sin ,(cos πααα≤≤.此时,直线l 的参数方程可写成⎩⎨⎧+=+=.sin ,cos 00ααt y y t x x )(R t ∈ 由于,sin ,cos 000ααt y y QP t x x Q P =-==-=所以P P t 0=,这是参数t 的几何意义. 例1写出过点)2,1(A ,倾斜角为135的直线1l 的参数方程.若1l 与2l :42-=x y 相交于点B . (1)求||AB ; (2)求点B 的坐标. 解 (1)1l 的参数方程为⎪⎩⎪⎨⎧+=+=.135sin 2,135cos 1t y t x )(R t ∈ 即⎪⎪⎩⎪⎪⎨⎧+=-=.222,221t y t x )(R t ∈ ① (2)欲求||AB ,由参数t 的几何意义,只要求出t ,则||||t AB =.把①代入2l 的方程,得 t 222+4)221(2--=t 解得 324-=t ,故 324||||==t AB 欲求点B 的坐标,由①,只要将324-=t 代入,得⎪⎪⎩⎪⎪⎨⎧=-⋅+==⋅+=.32)324(222,37324221y x所以点B 的坐标为)32,37(.例2 圆822=+y x 内有一个点AB P ),2,1(0为过0P 且倾斜角为α的弦. (1) 当4πα=时,求||AB ;(2) 当弦AB 被0P 平分时,写出直线AB 的方程.解 由已知,直线AB 的参数方程为 ⎩⎨⎧+=+=.sin 2,cos 1ααt y t x )(R t ∈把上式代入822=+y x ,整理得03)sin 2(cos 22=-++t t αα 它显然有二实根,记为21,t t ,由韦达定理得)s i n 2(c o s 221αα+-=+t t 321-=⋅t t (1) 当4πα=时, 2122122124)(||||t t t t t t AB -+=-=30)3(4)]4sin 24(cos2[2=--+=ππ所以 30||=AB(2) 弦AB 被点0P 平分,当且仅当021=+t t 且0>∆,即 21t a n 0)s i n 2(c o s 2-=⇒=+ααα, 即AB 的斜率为21-,从而直线AB 的方程为 )1(212--=-x y , 即 052=-+y x2. 圆锥曲线的参数方程 (1) 圆的参数方程.设圆的标准方程为222)()(r b y a x =-+- )0(>r . 由于 1)()(22=-+-rb y r a x ,所以ϕϕsin ,cos =-=-rby r a x 满足圆的方程,故圆的参数方程为 ⎩⎨⎧+=+=.sin ,cos ϕϕr b y r a x πϕ20(<≤为参数)(2) 椭圆的参数方程设椭圆的标准方程为 12222=+by a x )0(>>b a令ϕcos a x =,代入上式解得ϕsin b y ±=.由于ϕsin b y =与ϕsin b y -=对πϕ20<≤均表示相同的取值集合,故椭圆的参数方程为 ⎩⎨⎧==.sin ,cos ϕϕb y a x )0,20(>><≤b a πϕ例3 设P 为椭圆12222=+by a x 上任意一点,AB 为椭圆过中心O 的一条弦.如果PA 与PB 与对称轴都不平行,求证:PA与PB 的斜率的乘积为定值.证明 由于AB 过中心O,所以A 与B 关于O 对称,故可设)sin ,cos (),sin ,cos (θθθθb a B b a A --,)sin ,cos (ϕϕb a P ,则,)cos (cos )sin (sin θϕθϕ--=a b k PA )c o s (c o s )s i n (s i n θϕθϕ++=a b k PB .从而 2222222222222)cos (cos )1cos 1()cos (cos )sin (sin ab a COS b a b k k PBPA -=-+--=--=⋅θϕθϕθϕθϕ 即斜率的乘积为定值.(3) 双曲线的参数方程.设双曲线的标准方程为12222=-by a x )0,(>>b o a .由于 1)()(22=-by ax, 因此ϕϕtan ,sec ==bya x 满足上述方程,从而双曲线的参数方程为 ⎩⎨⎧==.tan ,sec ϕϕb y a x )23,2,20(πϕπϕπϕ≠≠<≤ (4) 抛物线的参数方程.设抛物线的方程为 px y 22= )0(>p令)(22R t pt y ∈=,代入上述方程,解得pt y 2±=.因为R t ∈,所以取pt y 2=.得抛物线的参数方程为⎩⎨⎧==.2,22pt y pt x t R t ,(∈为参数)例4 已知双曲线 12222=-by a x )0,(>>b o a 的左,右顶点为21,A A 与y 轴平行的弦21P P 的上,下端点为21,P P ,求直线21P A 与12P A 交点M 的轨迹方程.解 设直线21P A 与12P A 交点坐标为),(y x M ,又),(),0,(21o a A a A-.因为21P P //y 轴,所以设)t a n ,s e c (),tan ,sec (21θθθθb a P b a P -,从而21P A 的方程为 )(sec tan a x a a b y ++-=θθ. ①12P A 的方程为 )(sec tan a x aa b y --=θθ②①式与②式相乘,得 )()1(sec tan 2222222a x ab y ---=θθ )(2222a x a b --=, 即M 的轨迹方程为12222=+by a x .例5 动直线)0(>=a a x 平行移动交抛物线)0(22>=p px y 于B A ,两点.另一动点P 在抛物线上移动,直线PA,PB 分别交x 轴于M,N 两点.求证:线段MN 的中点为定点.证明 设)2,2(),2,2(),2,2(12122pt pt P pt pt B pt pt A -,则直线PA 的方程是)2(222222121211pt x pt pt pt pt pt y ---=- (这里221t t ≠) 即 )2(1221211pt x t t pt y -+=-. 令 0=y ,得点M 的横坐标12ptt x M -=在上式中,以pt 2-代替pt 2,则得112)2(ptt t pt x N =--=. 设MN 的中点为)0,(o x ,则022)2(2110=+-=+=ptt ptt x x x N M 所以 MN 的中点为)0,0(是个定点..课外活动 自己学 摆线一个圆沿着一条定直线滚动时,圆周上的一个定点M 的轨迹叫做摆线,又叫旋轮线(cycloid). 下面我们求摆线的参数方程.设圆的半径为a ,取圆滚动所沿的直线为x 轴,圆上定点M 落在直线上的一个位置为原点,建立直角坐标系(如图).圆滚动φ角后圆心在点B,并与x 轴相切于点A.作BA MC Ox MD ⊥⊥,,垂足分别为D,C.用(y x ,)表示点M 的坐标,取φ作参数,那么,OA 的长等于弧MA 的长,得φφsin a a DA OA OD x -=-==, φcos a a CB AB AC DM y -=-===. 因此,所求摆线的参数方程是 ⎩⎨⎧-=-=).cos 1(),sin (φφφa y a x (R ∈φ为参数)摆线有一此重要的性质,例如,物体在重力作用下从点A 滑落到点B(无摩擦),物体滑落所需时间最短的路线,不是沿点A 到点B 的直线,而是沿从A 到B 的一段摆线,如左图,因此摆线又叫最速降线.又如普通单摆的周期与振幅的大小有关.如果在摆的摆动平面内做两个如右图那样的摆线形挡板,在挡板的限制下,单摆的周期就与振幅的大小无关了,这时摆的运动轨迹也是一段摆线.持线的名称就是由这个性质得到的. 习题练习 自己练1. 写出下列直线的参数方程:(1) 过点)4,2(P ,倾斜角为611π; (2) 过点)2,3(--P ,倾斜角为32π.2. (1)写出过点)5,1(M ,倾角为3π的直线l 的参数方程;(2)若直线l 与'l :032=--y x 相交于N ,求||MN 和点N 的坐标;(3)若l 与圆O :1622=+y x 相交于A,B,试求||||MB MA +,||||MB MA ⋅和||AB .3.据气象预报,现在气象台A 处向东400千米B 处的海面上有一个台风中心形成,测得台风以40千米/小时的速度向西北方向移动,距中心不超过300千米的地方都受到台风的影响,从现在起,多少时间后气象台受到台风影响?气象台受台风影响的时间大约是多少?(结果精确到0.1小时) 4.写出下列圆的参数方程:(1)圆心为原点,半径2=r ; (2)圆心为)2,3(-,半径5=r .5.已知圆C B A y x ,),0,1(,122=+是圆上两个动点,若ABC ∆的顶点逆时针排列且3π=∠BOC ,求ABC ∆重心轨迹方程.\6.在椭圆13422=+y x 上有动点P 和定点)3,0(B ,以PB 为边作正BPQ ∆,求BPQ ∆面积的最大值及此时P 点的坐标.7.在椭圆141622=+y x 上有两点P,Q,O 是原点,若OP,OQ 斜率之积为41-,求证:22||||OQ OP +为定值. 8.已知椭圆),(),,(),,(,4433221122y x C y x B y x A y x =+是椭圆上任意三个不同点,(1)求112y x u +=的最大值; (2)求ABC ∆面积的最大值.9.设MN 是过双曲线12222=-by a x 中心孤弦,P 是双曲线上任意一点,求证:直线PM,PN 的斜率之积为定值.10.已知点),(y x 在双曲线422=-y x 上,求xyx -21的取值范围. 11.过抛物线px y 22=的顶点作互相垂直的两条弦OA,OB.求证AB 过定点.12.过点)4,2(-A 作倾斜角为135的直线l ,交抛物线px y 22=(0>p )于21,P P ,如果|||,||,|2211AP P P AP 成等比数列,求抛物线的方程.14.5 极坐标系(Polar Coordinate System) 1. 极坐标系平面上一个点的位置可用直角坐标系中的有序实数对来确定,也可以用方向角和距离来确定.例如,炮兵射击时是以大炮为基点,利用目标的方位角及目标与大炮的距离来确定目标位置的.下面研究如何利用角和距离来建立一个新的坐标系——极坐标系.如图,在平面内取一定点O,叫做极点(pole),以O 为端点引一条射线Ox ,叫做极轴(polar axis),再选定一个单位长度和角度的正方向(一般规定逆时针方向为正方向).这时对于平面任意一点M,设MOx OM ∠==θρ|,|,则点M 的位置可以用有序数对),(θρ表示, ),(θρ叫做点M 的极坐标(polar coordinate),其中ρ叫做点M 的极坐标(radius vector),θ叫做点M 的极角(polar angle). 这样建立的坐标系叫做极坐标系(polar coordinate system).当点M为极点时,它的极坐标为(ρ, θ),θ可以为任意值.当ρ<0时,规定(ρ, θ)对应的点为(-ρ, θ+π).如图,在极坐标系中,A,B,C,D,E,F,G各点的极坐标分别是(4, 0),(2,π/4),(3,π/2),(1, 5π/6),(3.5, π),(6, 4π/3),(5, 5π/3).角也可以取大于2π的值或负值,例如点B,D,F的坐标也可以写作(2, 9π/4),(1, 17π/6),(6, 10π/3)或(2, -7π/4),(1, -7π/6),(6, -2π/3).当极径取作负值时,如点A,C,E的极坐标也可以写作(-4, π),(-3, 3π/2),(-3.5, 2π).在极坐标系中,任一实数对(ρ, θ)在平面上有唯一点M与它对应;反过来,对于平面内任意一点,也可以找到它的极坐标(ρ, θ).但和直角坐标系不同的是:平面内一个点的极坐标可以有无穷多种表示法.例如(2, π/4),(2, 9π/4),(-2, 5π/4),(2, -7π/4)都表示点B的极坐标.一般地,如果(ρ, θ)是一点的极坐标,那么(ρ, θ+2nπ), (-ρ, θ+(2n+1) π)(n∈Z)都可以作为它的极坐标.但如果限定ρ>0,0≤θ<2π(或-π<θ≤π),那么在极坐标系中,除了极点外平面上的所有点所成的集合和实数对(ρ, θ)的集合{(ρ, θ)|ρ>0,0≤θ<2π}(或{(ρ, θ)|ρ>0,-π<θ≤π})构成一一对应关系.以下不作特殊说明时,认为ρ≥0.2.曲线的极坐标方程在极坐标系中,曲线可以用含有ρ,θ这两个变数的方程F(ρ,θ)=0来表示,方程F(ρ,θ)=0叫做这条曲线的极坐标方程. 由于平面内一个点的极坐标不唯一,因此曲线上点的极坐标不一定都适合方程,但其中应至少有一个坐标能够满足这个方程.这是曲线和极坐标方程有如下关系:(1)以方程F(ρ,θ)=0的解(ρ, θ)为极坐标的点都在曲线上;(2)曲线上每一点的所有极坐标中,至少有一个极坐标(ρ, θ)是方程的解.求曲线的极坐标方程,其实就是建立曲线上所有点的极径ρ与极角θ应满足的关系式.例1 如图,求经过点M(a,0)(a>0),且与极轴垂直的直线 的极坐标方程。
ch14双边z变换与反变换

若信号序列为x(n),其双边z变换为X(z) = ∑_{n=-infty}^{+infty} x(n)z^{-n}。
双边z变换的性质
线性性质
若x1(n)和x2(n)的z变换分别为 X1(z)和X2(z),则对于任意常数a 和b,有aX1(z) + bX2(z)的z变换 等于a*X1(z) + b*X2(z)。
分类
收敛域可分为两类,一类是绝对收敛 域,另一类是条件收敛域。
条件收敛域
在条件收敛域内,只有在满足特定条 件下,双边z变换才存在且收敛。
02 双边z反变换的定义与性 质
双边z反变换的定义
01
定义
双边z反变换是通过对双边z变换 的逆过程,将z域的函数转换为 时域的函数。
02
03
公式
意义
双边z反变换的公式为 (x(n) = frac{1}{2pi j}int_{C_0} X(z) z^{n}dz)
时移性质
若x(n)的z变换为X(z),则x(n-d) 的z变换为X(z*z^d)。
频移性质
若x(n)的z变换为X(z),则x[n*a] 的z变换为X(z/a^2)。
双边z变换的收敛域
收敛域
双边z变换的收敛域是指能使双边z变换 存在的z值范围,通常由极点、留数和
奇点决定。
绝对收敛域
在绝对收敛域内,无论z取何值,双 边z变换都存在且收敛。
在实现控制算法时,双边z变换可以用于离散化连续时间 系统,将连续时间系统转化为离散时间系统进行计算和控 制。
在信号处理中的应用
01
信号滤波和处理
双边z变换可以用于信号滤波和处理,通过设计滤波器函数并进行双边z
变换,可以实现信号的降噪、增强和特征提取等处理。
Ch_14经济学教案

竞争市场上的企业Firms in Competitive Markets第14章Chapter 142竞争的含义The Meaning of Competition完全竞争市场具有下列特征:A perfectly competitive market has the following characteristics:市场中有许多买者和卖者There are many buyers and sellers in the market.各个卖者提供的物品大体上是相同的The goods offered by the various sellers are largely the same.企业可以自由地进入或退出市场Firms can freely enter or exit the market.3竞争的含义The Meaning of Competition这些特征,使得完全竞争市场具有如下结果:As a result of its characteristics, the perfectly competitive market has the following outcomes:任何一个买者或卖者的行动对市场价格的影响都可以忽略不计。
The actions of any single buyer or seller in the market have a negligible impact on the market price.每一个买者和卖者都接受市场决定的价格。
Each buyer and seller takes the market price as given.4竞争的含义The Meaning of Competition竞争市场中的买者和卖者被称为价格接受者。
Buyers and sellers in competitive markets are said to be price takers.5竞争企业的收益Revenue of a Competitive Firm企业的总收益是销售价格乘以销售量。
CH14(单片机C51模块化编程)

新语新知—建立头文件的步骤
第二步 防重复包含处理
例如对于delay.h文件,其内容如下: #ifndef __DELAY_H__ #define __DELAY_H__ ... //此处添加代码 #endif
新语新知—建立头文件的步骤
第二步 防重复包含处理 因为在同一个工程内,文件名都是唯一 的,因此这种命名规则可以保证XXX不会重 复。之后要添加到.h文件的代码都放在第3行 的位置。
新语新知—模块化编程的三种手段
函数、宏定义与头文件
实现模块化编程的三个主要手段是函数、 宏定义与头文件,对于函数与宏定义之前我 们有所讲解,通过几个例子使大家进一步加 深对其的理解。下面讲解一下头文件操作的 详细步骤。
新语新知—建立头文件的步骤
第一步 创建头文件 建立一个.c文件(源文件)和一个.h文 件 (头文件)。原则上文件名可以任意 命名,但强烈推荐如下原则: .c 文件与 .h 文件同名 ;文件名要有意义,最好能 够体现该文件代码的功能。例如延时函 数相关的源文件与头文件命名为delay.c 与delay.h。
设置中间过程产生的文件的放置位置
编写主函数,编译 编译之后,可以发现编译器编译出错,说找不到led.h 于是,我们还必须进行一项设置(编译路径)
编译路径我们添加进去了,再重新编译,
可以看到没有报错,(一个警告是因为我们编写的另 外一个函数LED_OFF()函数没有调用),如果想不要 这个警告可以这样设置
延时相关函数的头文件
流程简介:在之前的几讲当中,我们定义过几种延时函
数,现在我们将延时函数统一为两种形式:微秒级延时函数 _delay_us(unsigned int n)与毫秒级延时函数 _delay_ms(unsigned int n)。注意对于单片机C语言,进出 一个函数所消耗的时间都是几个微秒级的,因此微秒级的延 时函数不可能做的非常精确,尤其是延时长度小于10uS时 基本已经无法使用。此处我们采用带参数的宏定义代替函数 形式来实现微秒级延时,可以适当提高定时精度。
CMOS模拟集成电路设计-ch14振荡器

4.1 环形振荡器调节(续)
正反馈引起的延时变化
半边电路等效: I1↑→|-1/gm3,4|↓ →( -1/gm3,4)||R1,2=R/(1-gm3,4R)↑ →fosc ↓
缺点:R1R2上的电流在控制过程 中会发生变化,输出摆幅在调节 范围内变化
-2/gm
半边等效
4.1 环形振荡器调节(续)
保证变容二极管反偏或正偏较弱
4.2 LC振荡器的调节(续)
变容二极管
N阱与衬底的电容 减小串连电阻
4.2 LC振荡器的调节(续)
变容二极管 消除N阱与衬底的电容的影响 采用PMOS器件电路
5、VCO的数学模型
相位与频率
d
dt
dt 0
VCO
Vout (t) Vm cos(out dt 0 ) Vm cos(0t KVCO Vcont dt 0 )
谐振时,Av gm1RP
接成反馈形式,谐振时,总相移 等于180,所以不能振荡
3.3 交叉耦合振荡器
起振条件: 谐振时,总相移为0
gm1RP1gm2 RP2 1
定义
4、压控振荡器
中心频率 调节范围ω2- ω1
调节线性度 输出摆幅 功耗 电源与共模抑制
输出信号纯度: 信号抖动(Jitter);相位噪声
剩余相位
ex KVCO Vcont dt
ex (s) KVCO
Vcont
s
积分器的传输函数
正反馈引起的延时变化(续) 利用差动对,使IT=ISS+I1, 保证输出振幅为2R1,2IT
为了避免M1M2没有电流通 过,在P点增加一个小恒流 源IH,以避免因此造成振 荡停止。 缺点:消耗了额外的电压余度
CH14_同步发电机结构及工作原理概论

4
第十四章
三相同步发电机的基本 工作原理与结构
2020/11/20
5
本章主要内容
第一节 三相同步发电机的基本工作原理及分类 第二节 同步发电机的基本结构 第三节 大型同步发电机的基本系统 第四节 同步发电机的型号与额定值
2020/11/20
6
三相同步发电机的基本工作原理
• 同步发电机(synchronous generator)是将机械 能转变为交流电能的设备。
• 转子:转动的部分,转子上有 磁极和励磁绕组,产生磁场。
• 定子(又叫电枢):固定的部 分,定子铁心上有齿和槽,槽 内设置有绕组,是切割磁场的 导体。
• 气隙:定转子之间有气隙。
动画
8
三相同步发电机的基本工作原理
• 定子:有三相定子绕组,每相 结构完全相同,它们在空间上 互差120°电角度对称分布放置 在定子铁心槽内。
在火电厂,发电机用汽轮机作原动机,称为汽 轮发电机;在核电站是以核反应堆来代替火电站的 锅炉,原动机仍然是汽轮机;
在水电厂,发电机用水轮机作原动机,称为水 轮发电机;
有的地方用柴油机用作原动机,称为柴油发电 机。
2020/11/20
7
三相同步发电机的基本工作原理
N
If
n
S
2020/11/20
• 同步发电机基本工作原理:导 体切割磁力线感应电动势。
火电厂和核电站的汽轮机拖动的发电机,转 速高,转子宜作成细而长的隐极式,这种发电机通 常称为汽轮发电机。
核电站用的汽轮发电机在构造上与常规火电站 用的大同小异,所不同的是由于蒸汽压力和温度都 较低,所以同等功率机组的汽轮机体积比常规火电 站的大。
水轮机拖动的发电机,转速低,因而要求有较 多的磁极,转子宜作成短而胖的凸极式。
西门子变频器V20 操作手册CH[14]
![西门子变频器V20 操作手册CH[14]](https://img.taocdn.com/s3/m/6a5dfabe82d049649b6648d7c1c708a1284a0ad6.png)
西门子变频器V20 操作手册CH西门子变频器V20操作手册1. 产品简介紧凑的尺寸,节省空间和成本简单的安装和调试,无需专业知识灵便的控制方式,支持多种通信协议高效的能耗优化,降低运行成本可靠的保护功能,提高设备寿命2. 安装要求2.1 安全提示变频器内部存在高压危(wei)险,请勿在通电状态下打开或者触摸变频器。
变频器输出电压可能高于输入电压,请勿在输出端接触裸露的导线或者端子。
变频器运行时会产生热量,请保持足够的散热空间和通风条件。
变频器可能会产生电磁干扰,请使用屏蔽电缆并接地。
变频器参数设置错误或者修改参数设置可能导致机器误操作,造成人员伤害或者设备损坏,请防止恶意访问参数设置,并采取适当措施应对可能的误操作。
2.2 安装位置和方式环境温度在-10℃到+50℃之间,相对湿度不超过95%无尘埃、油雾、腐蚀性气体、爆炸性气体等污染物无强烈的震动或者冲击海拔高度不超过1000米,否则需要降低额定功率安装距离不超过100米,否则需要增加输出滤波器或者输出电抗根据不同的功率段和电压等级,变频器有不同的尺寸和钻孔图,请参考[《V20产品样本》](^4^)中的相关数据。
1. 在控制柜内或者墙壁上钻孔,并使用螺钉固定变频器。
2.连接输入电源线、输出机电线、接地线和控制线到变频器的相应端子上。
3. 检查接线是否正确和坚固,无短路或者接地故障。
4. 关闭输入电源开关,并打开变频器的前盖。
5. 按下变频器上的电源开关,检查显示屏是否正常显示。
6. 关闭变频器的前盖,并打开输入电源开关。
3. 参数设置和调试使用变频器上的基本操作面板(BOP)使用外部按钮或者开关使用摹拟量或者数字量信号使用通信协议(如USS或者MODBUS RTU)根据不同的控制方式,可以选择不同的连接宏(connection macro),以简化参数设置。
连接宏是一组预设的参数值,用于实现常见的控制功能。
变频器提供了12种连接宏,分别为Cn000到Cn011,具体的功能描述和接线示意图,请参考[《V20入门指南》](^5^)中的相关内容。
ch14GlobalMarketingDecisions(全球营销-沃伦·J·基

PPT文档演模板
© 2005 Prentice Hall5/20/2020
ch14GlobalMarketingDecisions(全球 营销,沃伦·J·基
Direct Marketing
• Any communication with a consumer or business recipient that is designed to generate a response in the form of:
PPT文档演模板
© 2005 Prentice Hall5/20/2020
ch14GlobalMarketingDecisions(全球 营销,沃伦·J·基
The Strategic/Consultative Selling Model
PPT文档演模板
© 2005 Prentice Hall5/20/2020
PPT文档演模板
© 2005 Prentice Hall5/20/2020
ch14GlobalMarketingDecisions(全球 营销,沃伦·J·基
Couponing
• Couponing
– Printed certificates entitle the bearer to a price reduction or some other special consideration for purchasing a particular product
• Market maturity can also be different from country to country
• Local perceptions of a particular promotional tool or program can vary
材料力学:ch14 静不定问题分析
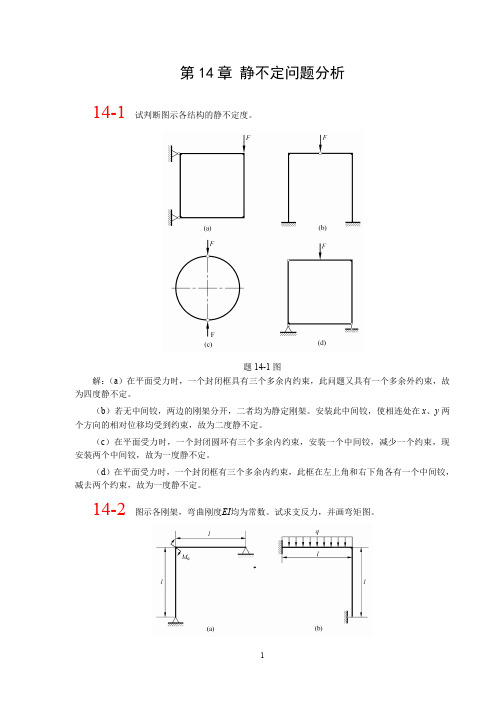
图 14-9(a) 根据对称条件,截面 C 的水平位移 ΔCx 为零,即
由此得到
ΔCx 0
FNC
3F 8
(→)
12
弯矩图如图(2)所示,最大弯矩为
|
M
|max
Fl 4
(b)解:此为三度静不定问题。有反对称性可利用。
在结构对称面 C 处假想切开,由于反对称,故有
FNC 0 , M C 0
待求未知内力仅有FSC一个。 求 ΔCy 的载荷状态及单位状态如图 14-9(b)所示。
弯矩方程为
图 14-2(b)
M x1 FBx x1 ,
M
x 2
F Bx l
q 2
x
2 2
将其代入 积分后,得 代入协调条件
M x1 x1 , M x2 l
ΔBx
1 EI
lM
0
x1
M
x1
dx1
1 EI
lM
0
x2
M
x2
dx2
ΔBx
1 EI
4 3
FBxl 3
ql 4 6
ΔBx 0
弯矩方程为
将其代入 积分后,得 代入协调条件
图 14-3(a)
M
FCx Rsin
F 2
R1
cos
M Rsin
ΔCx
1 EI
π/2 M M Rd
0
ΔCx
R3 EI
π 4
FCx
F 4
ΔCx 0
4
得 进而求得
(b)解:此为一度静不定问题。
FCx
F π
(←)
FBx
F π
(→)
求 ΔAy 的载荷状态及单位状态可示如图 14-3(b)。
CH14-杠杆企业的估值

完全权益公司应该放弃该项目: NPV < 0.
14.1 调整净现值法:例子
• 现在设想该公司以$600的债务为项目融资,利率rB = 8%。 • 该公司的税率是40%, 因而它每年有利息税盾TCBrB = .40×$600×.08 = $19.20。
在财务杠杆下该项目的净现值是: APV = NPV + NPV 债务税盾
应用指南
若企业的负债/价值比在项目寿命期内保持不变,则rS和 rWACC 也将保持 不变,用WACC法或FTE法。
若企业在项目寿命期内的负债绝对水平已知,用APV法。 在有些情况下用APV法比较好,比如在杠杆收购中、或在涉及利息补贴 和发行成本的情况下。 在现实工作的多数时候,公司有一个明确的目标负债-价值比,WACC和 FTE法更适用。
在存在发行成本和利息补贴的情况下,APV法比FTE法和WACC法 更适用。 APV法首先是在全权益情况下对项目进行估价。然后在这一结果 上加上负债连带效应的净现值。负债连带效应除了考虑节税效应,还 涉及发行成本和利息补贴。 参见例14-2
14.6 APV法举例
某公司正在考虑替换一个$5,000,000 的设备。初始费用将 在5年里直线折旧;在第5年的税前残值将是$500,000。该项目将 每年产生$1,500,000的税前节省,并且不改变公司的风险水平。 公司可以按12.5%获得$3,000,000的5年期贷款为该项目提供部分 融资。如果该项目以完全权益融资,资本成本将是18%。该公司 税率是34%,无风险利率是4%。该项目将需要$100,000的净营运 资本投资。 计算APV。
14.4 APV法、FTE法和WACC法的比较:总结 APV
初始投资 现金流量 折现率 融资连带效应PV All
ch14 第十四章 802.15.4 Overview
802.15.4 OverviewGeneral DescriptionGeneral Description (IEEE 802.15.4)Zigbee Network layer (NWK) topologies supports:Star NetworksTree NetworksMesh NetworksStar NetworksThe network is controlled by ZigBee coordinator The ZigBee coordinator is responsible for initiating and maintaining the devices on the network,All other devices, known as end devices, directly communicate with the ZigBee coordinatorTree NetworksRouters move data and control messages through the network using a hierarchical routing strategyIt may employ beacon‐oriented communication as described in the IEEE 802.15.4‐2003 specificationMesh NetworksIt shall allow full peer‐to‐peer communicationLR‐WPANsTwo different device types can participate in an LR‐WPAN network:9Full‐function device (FFD)–The FFD can operate in three modes serving as a personal area network(PAN) coordinator, a coordinator, or a device–An FFD can talk to RFDs or other FFDs, while an RFD can talk only toan FFD.9Reduced‐function device (RFD)–An RFD is intended for applications that are extremely simple, such asa light switch or a passive infrared sensor–They do not have the need to send large amounts of data and may onlyassociate with a single FFD at a time–An RFD can talk only to an FFD–The RFD can be implemented using minimal resources and memorycapacityComponents of the IEEE 802.15.4 WPAN The most basic is the device. A device can be an RFD or an FFDTwo or more devices within a POS communicating on the same physical channel constitute a WPANA network shall include at least one FFD, operating as the PAN coordinatorLR‐WPAN Architecture –Cont’dPHY9Provides two services: the PHY data service and the PHYmanagement service interfacing to the physical layer managemententity (PLME)9The PHY data service enables the transmission and reception ofPHY protocol data units (PPDUs)across the physical radio channel 9The features of the PHY are activation and deactivation of the radio transceiver, ED, LQI, channel selection, clear channel assessment(CCA),and transmitting as well as receiving packets across thephysical medium.9The radio shall operate at one of the following license‐free bands:–868–868.6 MHz (e.g., Europe),–902–928 MHz (e.g., North America) or–2400–2483.5 MHz (worldwide)LR‐WPAN Architecture –Cont’dMAC Sublayer9The MAC sublayer provides two services: the MAC data service and the MAC management service interfacing to the MAC sublayer management entity (MLME)serviceaccess point (SAP)(known as MLME‐SAP). The MACdata service enables the transmission and reception ofMAC protocol data units (MPDUs)across the PHY dataservice9The features of the MAC sublayer are beaconmanagement, channel access, GTS management, framevalidation, acknowledged frame delivery, association,and disassociation. In addition, the MAC sublayerprovides hooks for implementing applicationappropriate security mechanismsFunctional Overview of LR‐WPAN –Cont’d Data Transfer Model –Cont’dData transfer to a coordinator –Cont’d9Communication to a coordinator in a beacon‐enabled networkFunctional Overview of LR‐WPAN –Cont’d Data Transfer Model –Cont’dData transfer to a coordinator –Cont’d9Communication to a coordinator in a nonbeacon‐enabled networkFunctional Overview of LR‐WPAN –Cont’d Data Transfer Model–Cont’dData transfer from a coordinator–Cont’d9Communication from a coordinator in a beacon‐enabled networkFunctional Overview of LR‐WPAN –Cont’d Data Transfer Model–Cont’dData transfer from a coordinator–Cont’d9Communication from a coordinator in a nonbeacon‐enabled networkPHY SpecificationPHY SpecificationThe PHY is responsible for the followingtasks:Activation and deactivation of the radio transceiverED (Energy Detection)within the current channel LQI (Link Quality Indication)for received packets CCA for CSMA‐CAChannel frequency selectionData transmission and receptionGeneral requirements and definitions Operating Frequency RangeFrequency bands and data ratesGeneral requirements and definitions –Cont’d Channel assignments and numberingA total of 27 channels, numbered 0 to 26, are available across thethree frequency bandsSixteen channels are available in the 2450 MHz band10in the 915 MHz band1in the 868 MHz bandThe center frequency of these channels is defined as follows:9Fc= 868.3in megahertz, for k = 09Fc= 906 + 2 (k –1)in megahertz, for k = 1, 2, ..., 109and Fc= 2405 + 5 (k –11)in megahertz, for k = 11, 12, ..., 26 9Where k is the channel numberFor each PHY supported, a compliant device shall support allchannels allowed by regulations for the region in which the device operatesGeneral requirements and definitions–Cont ’d–Cont ’d Band (MHz)Channel Frequency (MHz)868 MHz868.319062908892099221092439104912591469167918915 MHzGeneral requirements and definitions–Cont ’dChannel assignments and numbering –Cont ’dBand (MHz)ChannelFrequency (MHz)1124051224101824401924452024502124552224602324652424702524752624801324151424201524251624301724352450 MHzGeneral requirements and definitions –Cont’d Channel assignments and numbering –Cont’dMAC Sublayer SpecificationMAC Sublayer SpecificationThe MAC sublayer handles all access to the physical radio channel and is responsible for the following tasksGenerating network beacons if the device is acoordinatorSynchronizing to the beaconsSupporting PAN association and disassociationSupporting device securityEmploying the CSMA‐CA mechanism for channel access Handling and maintaining the GTS mechanismProviding a reliable link between two peer MAC entities.。
中级财务会计英文ch14
statements.
Whether to recognize the effect of the change in
the current year’s net income or in the beginning retained earnings balance .
5.
6. 7. 8. 9.
Chapter 14-2
Describe the accounting for changes in estimates.
Identify changes in a reporting entity. Describe the accounting for correction of errors. Identify economic motives for changing accounting methods. Analyze the effect of errors.
Chapter 14-8
Reporting Approach Required
Retroactive Approach Retroactive Approach Prospective Approach Retroactive Approach* Retroactive Approach
Accounting Principle Changes
Changes in Accounting Principle
Three approaches for reporting changes:
1) Currently (cumulative effect). 2) Retrospectively.
智能之门:神经网络与深度学习入门(基于Python的实现)课件CH14

是有规律的。再加上前面章节中,为了实现一些辅助功能,我们已经写了很多类。所以,
现在可以动手搭建一个深度学习的迷你框架了。
Ø NeuralNet
• 隐层8个神经元 • 最大epoch=5000 • 批大小=10 • 学习率0.1 • 绝对误差停止条件=0.08 • 多分类网络类型 • 初始化方法为MSRA
Ø 训练结果和测试结果
Ø 比较
• ReLU 是用分段线性拟合曲线,Sigmoid 有真正的曲线拟合能力,因而拟合边界更加平滑。
• 但是 Sigmoid 也有缺点,看分类的边界,使用 ReLU 函数的分类边界比较清晰,而使用 Sigmoid 函数的分类边界要平缓一些,过渡区较宽。
• 初始化
ü Zero, Normal, MSRA (HE), Xavier ü 保存初始化值 ü 加载初始化值
• Pre_Update - 预更新 • Update - 更新 • Save - 保存训练结果值 • Load - 加载训练结果值
Ø DataReader
• ReadData - 从文件中读取数据 • NormalizeX - 归一化样本值 • NormalizeY - 归一化标签值 • GetBatchSamples - 获得批数据 • ToOneHot - 标签值变成OneHot编码用于多
• Layers - 神经网络各层的容器,按添加顺序维护 一个列表
• Parameters - 基本参数,包括普通参数和超参 • Loss Function - 提供计算损失函数值,存储历史
记录并最后绘图的功能
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ControlCircle1
Run
Example: Second Version for ControlCircle (with listener for Enlarge)
InterClass Create OuterClass Create
匿名类
在定义一个内部类时,也可以将整个类的描述包含在一个表达式范围里。 这样的语句有两个含义,一是定义一个匿名类,同时创建了一个对象。 程序 匿名类的示例 public void go(){ f = new Frame("Two listeners example"); f.add("North", new Label("Click and drag the mouse")); tf = new TextField(30); f.add("South", tf); f.addMouseMotionListener(new MouseMotionAdapter(){ public void mouseDragged(MouseEvent e){ String s = "Mouse dragging: X=" +e.getX() +"Y="+ e.getY(); tf.setText(s); } }); // <- 注意括号在这里的用法 f.addMouseListener(new MouseEventHandler()); f.setSize(300, 200); f.setVisible(true); }
DetectSourceDemo
Run
Alternative Ways of Defining Listener Classes
You may also define the custom frame class that implements ActionListener.
FrameAsListenerDemo
Run
Problem: Loan Calculator
LoanCalculator
Run
例 处理窗口事件
编写程序,在控制台中显示窗口事件的发生。当窗口 打开、正在关闭、已关闭、激活、取消激活、图标化、 取消图标化时会产生窗口事件。
Example:TestWindowEvent.java
例 为一个事件源注册多个监听器
Anonymous Inner Classes (cont.)
可以使用匿名内部类简化内部类监听器。匿名内部类是没 有名字的内部类。 匿名内部类语法如下: new SuperClassName/InterfaceName() { // Implement or override methods in superclass or interface // Other methods if necessary } AnonymousListenerDemo Run
例 处理简单的Action Event
编写程序,在窗口显示OK和Cancel按钮。在控制台 显示消息,表示点击了哪个按钮。
Example:TestActionEvent.java,TestActionEvent2.java
Example: First Version for ControlCircle (no listeners)
Alternative Ways of Defining Listener Classes
There are many other ways to define the listener classes. For example, you may rewrite Listing 6.3 by creating just one listener, register the listener with the buttons, and let the listener detect the event source, i.e., which button fires the event.
事件(event)表示程序某件事发生的信号。事件分为: 外部事件:由外部用户动作产生的事件。例如,点 击鼠标、按键盘。 内部事件:由系统内部产生的事件。例如,定时器 事件。 源对象(source object)是指能创建一个事件并触发该 事件的组件,又称源组件
事件类
ActionEvent AdjustmentEvent AWTEvent EventObject ComponentEvent ItemEvent TextEvent ListSelectionEvent ContainerEvent FocusEvent MouseEvent
内部类使用示例
程序 内部类使用示例 package test; public class OuterClass{ private class InterClass{ public InterClass(){ System.out.println("InterClass Create"); } } public OuterClass(){ InterClass ic = new InterClass(); System.out.println("OuterClass Create"); } public static void main(String[] args){ OuterClass oc = new OuterClass(); } 输出结果如下: } C:>java test/OuterClass
匿名类
匿名的内部类没有名字,不能被其他类来继承,但它可 以作为一个接口,由另一个内部类实现。虽然匿名类的 代码效率较高,但代码的可读性也随之下降。
匿名类监听器
监听器类是特意为创建一个GUI组件(例如一个按钮)而设计的监听器对象。 监听器类不被其他应用程序所共享,因此比较好的做法是将他作为一个内部 类定义在框架类中。
JRadioButton ItemEvent, ActionEvent
监听器、注册以及处理事件
源对象触发一个事件,对此事件感兴趣的对象就会处 理它,将对此事件感兴趣的对象成为监听器。 监听器对象的类必须是相应事件监听器接口的实例, 以确保监听器有处理这个事件的正确方法。 监听器对象必须由源对象注册。
Java程序设计
第14章 事件驱动编程
学习目标
理解事件驱动的编程 了解事件、事件源和事件类 掌握如何声明监听器类、编写事件处理方法 掌握如何注册监听器对象 了解如何处理ActionEvent、MouseEvent和 KeyEvent 了解Timer类的使用
事件驱动编程
过程化编程:程序按过程化的顺序执行。 事件驱动编程:代码在事件发生时执行。Fra bibliotek内部类
通过内部类的机制可以在一个编译单元内定义多个公 有类,但它是有限制的,内部类的定义仅在它所属的 外部类中可见,正因为有这样的机制,可以将一些逻 辑上相关的类组织在一起。 例 class OuterClass{ class InnerClass{} //内部类 } class AnotherClass{ public void amethod(){ InnerClass I = new InnerClass (); //类外不能创建Inner对象,错误 } }
Now let us consider to write a program that uses two buttons to control the size of a circle.
ControlCircle2
Run
内部类的概念
一个编译单元中只能包含一个public类,如果要创建含 多个public类的文件,编译器会报告错误。但Java提供 了另外的机制,允许程序员在一个类的内部定义另一个 类,这样定义的类称为内部类(Inner class)。内部类 ,也称嵌套类。内部类可以是公有的。 例如,我们可以创建如下的内部类: class OuterClass{ class InnerClass{} } 在类OuterClass中又定义了一个类InnerClass,这是个内 部类。包含内部类的类称为外部类或顶层类。当编译时 ,会生成两个字节码文件,分别是:OuterClass.class 和OuterClass$InnerClass.class。内部类的名字前会加 上它所属的外部类的名字。
为按钮添加多个事件监听器。
Example:TestMultipleListener.java
鼠标事件
MouseEvent描述鼠标按下、释放、点击、移动、拖动 等事件。 MouseListener监听鼠标按下、释放、点击、移动动作。 MouseMotionListener监听鼠标移动、拖动动作。
内部类
在类AnotherClass中,不能使用InnerClass,因此不 能创建InnerClass对象。而下面的代码是正确的。 class OuterClass{ public void amethod(){ InnerClass I = new InnerClass (); // 类内可以创建Inner对象 } public class InnerClass{}; }
InputEvent
PaintEvent WindowEvent
KeyEvent
每个事件对象包含与该事件相关的属性。getSource()方 法可以获取事件的源对象。
用户动作产生的事件
用户动作 源对象 事件类
单击按钮
单击复选框 单击单选框 在文本框里按回车键 选择一个新项目 窗口打开、关闭等 鼠标按下、释放等 键盘按钮、释放等