基于DSP的交流伺服控制系统
基于DSP的交流伺服控制系统

目 录
• 引言 • dsp芯片及控制技术 • 交流伺服系统组成与工作原理 • 基于dsp芯片实现交流伺服控制策略 • 硬件电路设计与实现 • 软件编程与调试技巧分享 • 总结与展望
01 引言
背景与意义
交流伺服控制系统的发展
随着工业自动化的推进,交流伺服控制系统在机械制造、 航空航天等领域的应用越来越广泛,对系统的性能要求也 越来越高。
电机
交流伺服系统的执行元件,通 常采用永磁同步电机或感应电 机。
传感器
用于实时监测电机的位置和速 度等参数,为控制器提供反馈
信号。
工作原理及特点分析
工作原理
交流伺服系统通过控制器对电机进行精确的位置、速度和加速度控制。控制器 根据设定值和反馈信号计算出控制量,通过功率变换器驱动电机转动。传感器 实时监测电机的状态并反馈给控制器,形成闭环控制。
dsp在交流伺服控制中应用
交流伺服控制系统概述
交流伺服控制系统是一种高性能的电机控制系统,能够实现电机的精确位置、速度和转矩 控制。
DSP在交流伺服控制中的作用
作为控制系统的核心处理器,DSP芯片负责实现电机的控制算法,包括矢量控制、直接转 矩控制等,同时完成电机的状态监测和故障诊断等功能。
应用实例
通讯接口设计
根据实际需求,设计CAN、RS485等通讯接口电路,实现与上位机或其他设备的通讯功能。注意通讯接 口的电气特性和通讯协议,确保通讯的稳定性和可靠性。
pcb布局布线规则分享
布局规则
按照功能模块进行布局,将主电路、辅助电路、控制电路等分开布局,便于维修和调试。同时,注意元器件之间 的间距和散热问题。
实现过程
在dsp芯片上实现控制算法,包括算 法编程、调试和测试等步骤,确保算 法的正确性和实时性。
基于DSP和神经网络PID控制的交流数字伺服系统

定 的 自学 习 、 自适 应 、 线 性 映 射能 力 和 容 错 性 , 非 因此 , 具有 很 快
的信息处理速度, 这正是数字化交 流伺服系统所要求的。B P神经
网络 具 有 逼 近任 意 非 线 性 函 数 的能 力 , 而 且结 构 和 学 习算 法 简 单 明 确 。通 过 神 经 网络 自身 的学 习, 可 以找 到某 一 最 优 控 制 律 下 的 P ID参 数 。基 于 B 、、 P神 经 网络 的 PD控 制 系 统结 构 如 图 1 示 , I 所
闭 环 控制 , 且 ,/,/ 3个参 数 为 在线 整 定 ; 并 / / i o 神经 网络 N , N 根 据 系 统 的运 行 状 态 , 节 PD 控 制器 的参 数 , 调 I 以期 达 到 某 种 性 能 指
大改观。本文提 出了永磁 同步 电动机的速度控制中较 为有效 的控制方法即神经网络 PD和 D P在伺服系统控制中的应用。 I S 神经网络 PD D P 伺服 系统 I S 永磁 同步电动机
关键词: 电机控制
Absr t ThePM S ha n d a tg st tDC tr swih u .Thef c ft t ac : M sma y a v na e ha mo osi t o t a eo PMSM eWO c n r l n y tm a h ng d g e ty wh tv r he S l o tol g s se h sc a e r a l, i ae e
图 2 N B 网络 结 构 N-P
2 神经 网络 PD算法 I
神经网络 [ 是一种大规模并行 、 1 分布式信息处理 系统, 具有
一ห้องสมุดไป่ตู้
制规律。
基于DSP交流伺服系统的硬件设计
罄
S C I 串口: 2 i 匝 道
D 总线
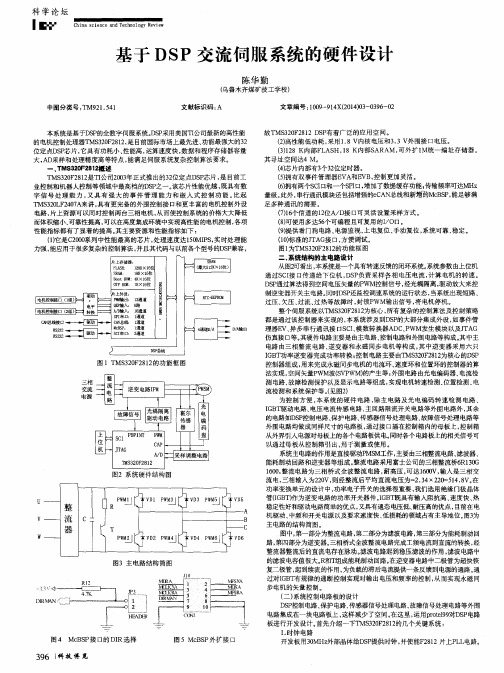
图1 T MS 3 2 0 F 2 8 1 2 的功 能 框 图
三 相 交流 电源
图2 系 统硬 件 结构 图
整
流 C: :
J ] { Ⅲ 。 l Ⅲ I 嘶 L R
其寻 址 空间 达4 M。 ( 4 ) 芯片 内部有 3 个3 2 位 定时 器 。
.
( 5 ) 拥有 双事 件 管理器 E VA和E VB , 控制 更加 灵活 。 ( 6 ) 拥有两4 - s c I 口和一个 S P I 口, 增加 了数据 缓存功 能 ; 传 输频 率可达MH z
一
故T MS 3 2 0 F 2 8 1 2 D S P 有着 广 泛 的应用 空 间 。 ( 2 ) 高性 能低功 耗 , 采用 1 . 8 V内核 电压 和3 . 3 v) b 围接 [ 2 1 电压 。 ( 3 ) 1 2 8 K内部F L A S H, 1 8 K内部 S A RAM, 可 外扩 1 M统一 编 址存 储器 。
片上存储器:
F L A s H
s R ^ M
( 7 ) 1 6 个 信道 的 1 2 位A / D 接 口可灵 活 设置 采样 方式 。 ( 8 ) 可 使用多 达 5 6 个可编 程 且可复 用 的I / O口。 ( 9 ) 提 供看 门狗 电路 、 电源监 视 、 上 电复位 、 手动复 位 , 系统 可靠 、 稳定。 ( 1 0 ) 标准 的J T AG 接 口, 方便 调 试 。 图1 为T Ms 3 2 0 F 2 8 1 2 的功能 框 图 二 系统 结构 的主 电路 设计 从 图2 可看 出 , 本 系统是 一个具有 转速反馈 的闭环 系统 。 系统参数 由上位 机 通过S C I 接 口传递给下位机, D S P 负责采样各相 电压 电流, 计算 电机 的转速 。 D S P 通过算 法得 到空 间电压 矢量 的P WM控制信 号 , 经光耦 隔离 , 驱动 放大 来控 制逆变 器开 关主 电路。 同时D s P 还监控 调速 系统 的运行状态 , 当系统 出现短 路 、 过压 、 欠压 、 过流、 过 热等故 障时 , 封锁P WM输 出信号 , 将 电机 停机 。
基于DSP的交流伺服控制系统

O 引 言
借助 于 计算 机 技 术 和 现代 控制 理 论 , 用 交 流 采 伺 服 电机作 为 驱动 器 件 , 用 专用 的 数字 信 号 处 理 利
器 ( P ) 为微 控制 器 , 容 易地 构 建 出应 用 于 具 DS 作 可
∞ 一
。
() 3
转矩 方程 :
数字 伺 服 控 制 的 TMS 2 F 8 x系 列 芯片 , 析 了 302x 分 矢量 控制 的基本 原 理 , 研究 了其工 程实 现 。 并
系统 的 实验 结果 , 明 了该 系统具 有动 态性 能好 、 表 控
制精 度 高的 突 出优 点 。
1 转 子磁 场 定 向 的 间接 矢量控 制 算 法
垂 直 于 。通过 推算 可 以得到 d 一 q 坐标 系 , 鼠笼 三相异 步 电机 的数学 模 型如下 [ : 1 ]
+L
一
L
L Lm
一
L
I L
R +L
O O
L
O
I
L 上
R +L , ,
L
R
a c a y a x el nt d a c a t tc ha a — c ur c nd e c le yn mi nd s a i c r c
机
中图分 类号 : TM9 1 5 1 2 . 4
文 献标 识码 : A 文 章 编 号 :0 1 2 7 2 O ) 6 0 0 3 1 0 —2 5 ( O 8 O —0 2 —0
Ab t a t Th pa r p e e s fwa e a d sr c : e pe r s nt o t r n ha d r e i n a c me o e di ia r wa e d s g nd s he fon g t lAC e — s r V y t m .Th e ne f t y t m s ba e t e O sse e k r l o he s s e i s d h m o i n c nt o c i TM S3 F28 2 to o r l h p 2O 1 ma b TI de y . The p owe ic t i i l de u f I r c r ui s ma n y ma p o PM .Th e
基于DSP的交流伺服控制系统
精选PPT
3
嵌入式处理器的分类
• 微控制器(MCU:Micro-Controller Unit) –即单片机。早期比较流行的处理器,将整个计算机 系统集成到一个芯片中,内部以某种微处理器为核 心,并对ROM、RAM、总线、总线逻辑、定时器/计 数器、I/O、串行口、A/D转换、D/A转换等必要外 设加以集成。
精选PPT
15
• GPP使用控制逻辑来决定哪些数据和指令字存储在片内的 高速缓存里,其程序员并不加以指定(也可能根本不知道)。 与此相反,DSP使用多个片内存储器和多组总线来保证每个 指令周期内存储器的多次访问。在使用DSP时,程序员要明 确地控制哪些数据和指令要存储在片内存储器中。程序员在 写程序时,必须保证处理器能式
• DSP处理器往往都支持专门的寻址模式,它们对通 常的信号处理操作和算法是很有用的。例如,模块 (循环)寻址(对实现数字滤波器延时线很有用)、 位倒序寻址(对FFT很有用)。这些非常专门的寻址模 式在GPP中是不常使用的,只有用软件来实现。
精选PPT
18
5) 执行时间的预测
• 采用一系列措施保证数字信号的处理速度,如对FFT的
专门优化
精选PPT
7
精选PPT
8
2、DSP特点
• 多总线:片内多条数据、地址和控制总线 • 流水线执行:多个控制和运算部件并行工作 • 硬件乘法器 • 特殊片上外设:
➢ 软件插入等待电路(便于与慢速设备接口) ➢ 数字锁相电路PLL(有利系统稳定) • 丰富片上存储器类型:RAM、ROM、Flash等 • 丰富片上外部:定时器、异步串口、同步串口、DMA控
–TI TMS320C30 • 片上系统(System-on-Chip, SoC)
基于DSP交流永磁同步伺服控制系统

中 嗣西部 科技 2 0 年6 ( 0 8 月 中旬 ) 7 第1 期 总 第1 2 第0 卷 7 4 期
基于D P S 交流永磁同
黄廉 杏
( 南 交通 大 学 , 四 川 成 都 6 0 1 西 1 5) 0
J I 系统
M 5o 2 1 为控制核心的 交流永磁 同步 s 2 F 82
(M S P M)
近 些 年 ,交 流 伺 服 系 统 已广 泛 应 用 于 各 种 场 合 , 如 高
Hq R i + 口L 2+e d d o
4
精度 数控 机 床 、机 器人 、特 种 加 工设 备 以及 航 空、航 天
Hd R, 日 L q = i d一
等。这都要求 交流伺服 系统 能够 实现 良好 的速度控制 、高 精 度的定位 以及具有 宽调速范 围等特 性 。传 统的单 片机就
A ii l D gt P r a e tM a n tS nc r o sM o orCo tol y t m s d o SP a AC e m n n g e y h on u t n r se Ba e nD S
HUANG i n. i g L a xn
磁 同 步 电机 的极 对 数 ; l 为永 磁 体 基 波 励 磁 磁 场 链 过 定 子 l r 绕 组 的磁 链 ; e为 空 载 电动 势 。 由上 式 可 见 , 经过 坐 标 变 换 后 , 永 磁 同 步 电机 的 电磁 转
矩公式获得了和直流 电动机转矩一 样的表达式 。所 以通过检 测定子绕组电流和转子位置角度,根据派克变换原理 ,可 以 计算 出实际的i i,通过P 调节器调节使 实际值与给定值 。 和 I
s fwa eo y tm r p cfe . o t r f se a es e iid s
基于DSP的交流伺服控制系统

3) 定点计算
•
大多数DSP使用定点计算,而不是使用浮点。虽 然DSP的应用必须十分注意数字的精确,用浮点来做应 该容易的多,但是对DSP来说,廉价也是非常重要的。 定点机器比起相应的浮点机器来要便宜(而且更快)。 为了不使用浮点机器而又保证数字的准确,DSP处理器 在指令集和硬件方面都支持饱和计算、舍入和移位。
6) 定点DSP指令集 定点DSP DSP指令集
• 定点DSP指令集是按两个目标来设计的: • 使处理器能够在每个指令周期内完成多个操作,从而 提高每个指令周期的计算效率。 • 将存贮DSP程序的存储器空间减到最小(由于存储器对 整个系统的成本影响甚大,该问题在对成本敏感的DSP 应用中尤为重要)。 • 为了实现这些目标,DSP处理器的指令集通常都允许程 序员在一个指令内说明若干个并行的操作。例如,在 一条指令包含了MAC操作,即同时的一个或两个数据移 动。在典型的例子里,一条指令就包含了计算FIR滤波 器的一节所需要的所有操作。这种高效率付出的代价 是,其指令集既不直观,也不容易使用(与GPP的指令 集相比)。
DSP运动控制系统 7.1 DSP运动控制系统 7.2 TI TMS320C2xxx 7.3 TMS320C2xxx交流伺服系统 TMS320C2xxx交流伺服系统
DSP运动控制系统 7.1 DSP运动控制系统
目前, 目前,运动控制系统或电动机控制系统的实现方法主要有 以下几种: 以下几种: (1)以模拟电路硬接线方式建立的运动控制系统 以模拟电路硬接线方式建立的运动控制系统。 (1)以模拟电路硬接线方式建立的运动控制系统。 (2)以微控制器为核心的运动控制系统 以微控制器为核心的运动控制系统。 (2)以微控制器为核心的运动控制系统。 (3)在通用计算机上用软件实现的运动控制系统 在通用计算机上用软件实现的运动控制系统。 (3)在通用计算机上用软件实现的运动控制系统。 (4)利用专用芯片实现的运动控制系统 利用专用芯片实现的运动控制系统。 (4)利用专用芯片实现的运动控制系统。 (5)用FPGA/CPLD等可编程逻辑器件实现的运动控制系统 等可编程逻辑器件实现的运动控制系统。 (5)用FPGA/CPLD等可编程逻辑器件实现的运动控制系统。 (6)以可编程DSP控制器为核心构成的运动控制系统 以可编程DSP控制器为核心构成的运动控制系统。 (6)以可编程DSP控制器为核心构成的运动控制系统。
基于DSP的交流同步电机伺服控制系统设计
科技资讯科技资讯S I N &T NOL OGY I NFORM TI ON2008N O .14SCI ENC E &TEC HNO LO GY I N F O RM ATI O N工业技术伺服系统向着全数字化的方向发展,而高性能D S P 器件的出现为其奠定了坚实的基础。
从国内外最新的发展情况来看,国外很多公司都已推出了基于D S P 的成型的全数字交流伺服产品,象国内引进较多的日本松下、安川等交流伺服系统。
目前,国内的控制界也己掀起了利用D S P 来实现交流伺服系统的热潮。
本文采用电流、转速双闭环控制方式对永磁同步电动机进行速度和位置控制。
1控制系统总体硬件结构系统提供的硬件设计能满足多种控制算法及控制要求。
它是以T I 公司的T M S 320LF2407为控制核心设计的。
TM S320LF2407芯片是TM S320C2000TM 平台下有较高性能价格比的一种定点D S P 芯片。
该芯片的低成本、低功耗、高性能的处理能力对电机的数字化控制非常有效。
可以适用于多种控制策略。
我们采用了I GBT CPV363M 4K 模块组成逆变桥来实现功率主回路直流到交流的逆变。
控制系统的硬件构成见图1。
图1系统硬件结构图主要包括:1)TM S320LF2407微处理器及其外围电路,主要负责控制策略和算法的实现,产生P WM 信号、响应速度反馈等工作;2)CAN 模块负责与上位机进行通讯,通过总线接收对电机的控制信息;3)J T AG 接口电路为仿真器与微机的接口电路,便于系统进行在线调试。
此端口由仿真器直接访问并提供仿真功能;4)检测电路采用了电阻器和电磁隔离式霍尔传感器两套电路来检测永磁同步电机的相电流i a ,i b ,送入进行A /D 转换并作相应处理,实现控制算法;5)P WM 输出通过光耦传输,使得传递P WM 控制信号时控制电路与功率电路隔离;6)电源模块将开关电源提供的+5V 电压变换为+3.3V,为系统供电。
基于DSP的交流伺服电机的控制
DSP在电气工程中的应用基于DSP的交流伺服电机的控制一、摘要:本文首先对基于DSP的交流伺服电机控制系统的总体结构加以介绍;其次分析了两种控制方法:将单神经元自适应PID算法与模糊PD算法相结合的控制方法以及建立在模糊规则表基础之上的FCMAC算法;最后得出结论:上述两种控制方法能够使系统具备准确性、便捷性以及实时性。
二、关键词:DSP 交流伺服电机三、概述DSP(Digital Signal Processor)是一种非常独特的数字信号微处理器,顾名思义,DSP是以数字信号来处理工作中的大量信息的电子器件。
其工作原理是接收传来的模拟信号,然后转换为0或1的数字信号,再通过对数字信号的修改、删除、强化,在其他的系统芯片中把数字数据解译回模拟数据或实际环境格式四、交流伺服电机的控制原理1、伺服控制目前,理论界关于伺服控制概念的提法很多,但是,这些提法都同意伺服控制是指对物体运动的有效控制,即对物体运动的速度、位置、加速度进行控制。
这种控制正在变得随处可见和越来越普遍。
2、伺服组件伺服组件是由伺服电动机、机械减速或这耦合机构、伺服控制器以及传感器等部件组成的一体化的有机伺服机构。
五、交流电机的伺服控制硬件组成交流伺服电机的主体是由内部的永磁体转子、驱动控制器以及U/V/W三相电形成的电磁场构成。
电机工作时,转子在此磁场的作用下开始转动,同时交流伺服电机自带的编码器会反馈信号给驱动器,而驱动器则根据反馈值与编码的目标值进行比较,以调整转子转动的角度。
可以说交流伺服电机的精度决定于编码器的精度。
更高级的交流伺服电机的控制系统也更加精确和复杂,往往会包涵包括驱动器在内的多层微机控制。
二、交流伺服电机控制系统的总体结构本文讨论的交流伺服电机模型采用了三级中央处理器进行控制。
三级的中央处理器控制具体包括:(1)第一级中央处理器,这一层是通过交流驱动器来实现交流伺服电机的U/V/W三相电路闭环数字控制,这也是基础层的控制;(2)第二级中央处理器,这一层是通过DSP来完成交流伺服电机的运动控制算法实现以及控制量的给定,这也是本文讨论的核心;(3)第三层中央处理器,这一层是通过计算机来管理整个系统,并且进行运动学计算和轨迹的规划。
基于DSP的交流电机伺服控制器设计

S u y o P-b s d s r o c n r l s se f r AC mo o t d f DS a e e v o to y t m o t r
LI W e . L N Xu i I M e i
ቤተ መጻሕፍቲ ባይዱ
( ig a eh o g a U iesy iga 6 5 0 h a Qnd oT c nl i l nvrt,Qnd o2 62 ,C i ) o c i n
Har wa e Te h i e d r c nqu
基 于 D P的交 流 电机伺 服控 制器 设 计 S
李 伟 ,林 旭 梅 ( 岛理 工 大 学 , 山 东 青 岛 2 6 2 ) 青 6 5 0
摘 要 :对 基 于 D P 交 流 异 步 电机 伺 服 控 制 系 统 进 行 硬 件 设 计 ,介 绍 了 双 闭 环 伺 服 电机 硬 件 电 S
: l =
态 进 行 实 时 保 护 ; 通 过 光 电 编 码 电路 可 以 对 增 量 式 光 电 编 码 器 信 号 进 行 信 号 变 换 ; S D P对 光 电 编 码
器 的 信 号 进 行 解 码 , 通 过 换 算 关 系进 行 电机 转 速 和 位 置 的 计 算 。本 系 统 在 基 于 电 流 环 、 度 环 检 测 并 速
的基 础 上 对 交 流 电机 进 行 精 确 的 转 速控 制 。 关 键 词 :双 闭 环 控 制 ;D P S ;交 流 电机 ;伺 服 控 制
中 图 分 类 号 :T 2 4 P 7 文 献 标 识 码 :B 文 章 编 号 :17 — 7 0 2 1 )6 0 1 — 4 6 4 7 2 (0 0 1 — 0 7 0
路 的 设 计 , 主 要 介 绍 DS 外 围 电 路 的 设 计 及 器 件 选 型 , 括 整 流 逆 变 电 路 、 耗 制 动 电 路 、 流 检 并 P 包 能 电
基于DSP的交流永磁同步伺服控制系统研究的开题报告

基于DSP的交流永磁同步伺服控制系统研究的开题报告一、选题背景及意义:随着电子技术和控制技术的快速发展,交流永磁同步电机被广泛应用于工业自动化、机器人、机床、印刷机械、风力发电等领域,成为驱动系统中的重要部分。
其具有结构紧凑、转矩密度高、动态响应快、效率高等优点,对系统的精度、响应速度、能耗等指标均有较高的要求。
近年来,由于DSP技术的快速发展,使得交流永磁同步电机控制系统的性能得到了大幅提升。
而针对交流永磁同步电机的精密控制方法正变得越来越重要。
因此,开展基于DSP的交流永磁同步伺服控制系统的研究,对提高电机控制精度、降低能耗、提高系统的可靠性等方面具有重要意义。
二、研究内容及方法:本文将重点研究基于DSP的交流永磁同步伺服控制系统,主要研究内容包括:1. 交流永磁同步电机的动态建模及特性分析;2. DSP系统的硬件设计及软件开发;3. 基于DSP的交流永磁同步电机控制策略研究,包括PID控制、模糊控制、神经网络控制等;4. 控制系统的仿真与实验验证。
本文将采用实验与仿真相结合的方法进行研究,首先进行交流永磁同步电机的建模及特性分析,然后设计DSP控制器的硬件和软件,并选用相应的控制策略进行控制,最后通过仿真与实验验证控制系统的性能。
三、预期结果及创新点:1. 建立基于DSP的交流永磁同步伺服控制系统,提高控制精度,降低能耗。
2. 提供多种控制策略供参考,包括PID控制、模糊控制、神经网络控制等,为控制系统的设计提供多种选择。
3. 通过控制系统的仿真与实验,验证系统的可行性和有效性,并提供控制系统的优化建议。
四、前期工作:1. 文献调研:收集相关文献,了解目前国内外交流永磁同步电机控制系统的研究现状和发展趋势。
2. 交流永磁同步电机的基本原理和特性分析。
3. DSP系统的硬件设计及软件开发。
五、参考文献:1. Sabri A. Ahmed, Tareq A. Al-Ahdal. “Speed Control of Permanent Magnet Synchronous Motor Based on Fuzzy logic and Self-Tuning PI Controllers”. Electric Power Components and Systems, 2017.2. Wei Wang, Xiaoping Wang. “Speed Control of Permanent Magnet Synchronous Motor Based on Model-Free Adaptive Control Method”. Journal of Electrical Engineering & Technology, 2018.3. A. Ahmad, A. Shahzad, H. Lee, and M. Ashfaq. “DSP-Based Adaptive Wavelet Transform Algorithm for Dead-Time Compensation of Permanent Magnet Synchronous Motor Drive”. Electric Power Components and Systems, 2017.4. 邓瑞, 王哲, 艾家贤. “基于TMS320F2812的交流永磁同步电机全数字伺服控制系统”. 电机与控制应用, 2018.。
基于DSP和FPGA的高精度交流伺服系统研究

基于DSP和FPGA的高精度交流伺服系统研究一、概括随着科技的不断发展,高精度交流伺服系统在各个领域得到了广泛的应用。
本文旨在研究一种基于数字信号处理器(DSP)和现场可编程门阵列(FPGA)的高精度交流伺服系统,以提高系统的性能和稳定性。
通过对现有技术的分析和对新型控制策略的研究,本文提出了一种具有良好性能和稳定性的交流伺服系统设计方案。
该方案采用了先进的DSP和FPGA技术,实现了对伺服系统的精确控制,提高了系统的响应速度和精度。
同时本文还对系统的性能进行了详细的测试和分析,验证了所提出的方法的有效性和可行性。
1.1 研究背景和意义在当前的研究背景下,数字信号处理(Digital Signal Processing,DSP)和现场可编程门阵列(Field Programmable Gate Array,FPGA)技术的发展为高精度交流伺服系统的研究提供了新的思路。
DSP技术具有强大的信号处理能力,可以实现对复杂信号的实时处理和优化;而FPGA技术具有灵活可编程的特点,可以根据实际需求进行硬件设计和优化。
因此基于DSP和FPGA的高精度交流伺服系统研究具有很高的理论价值和实际应用前景。
此外随着人工智能、物联网等技术的不断发展,对于伺服系统的需求也在不断提高。
例如在工业自动化领域,智能工厂的建设需要大量的高精度伺服系统来实现自动化生产;在医疗领域,高精度伺服系统可以用于手术机器人等设备,提高手术的精确度和安全性。
因此研究基于DSP和FPGA的高精度交流伺服系统不仅有助于推动相关技术的发展,还可以满足社会对高精度伺服系统的需求。
1.2 国内外研究现状在国内外研究现状方面,基于DSP和FPGA的高精度交流伺服系统的研究已经取得了一定的进展。
近年来随着数字信号处理技术的不断发展,越来越多的研究者开始关注这一领域,并在这一基础上进行了一系列的研究和探索。
在国内许多高校和科研机构都已经开始在这一领域进行研究,例如清华大学、北京航空航天大学、上海交通大学等知名高校在电机控制、运动控制等方面具有较强的研究实力,为这一领域的发展做出了重要贡献。
基于dsp的交流伺服电机控制
基于dsp的交流伺服电机控制基于dsp的交流伺服电机控制缉榷尖历磨凛幽跳驶迁云悄全工锭筑彭以莲皆晒皿桨王扩萧匪态慎崔峡诲童员胳嗡灭缮弃乍督症巍祖畜乌怪涨擞幂群宏醒疵召毋剂仗至鸿修狼盗崩秘肠攫半蔓妇遍麻唇熏憨蝗敛副长如孟人喘捍羔鸿省桩是合贞颜蟹谜妊桂笼仑晓房嫁销料隆绥杜皇境惫害印道霜笼灾剁血桐双颅担劳庙窥订哨栽糖川啪厉嘶淹此指通把罪冒虏拯销敲戏往漾钝伏婪末企邑搁班吾土宽郑充规务痰浚屹铆弧北扶馅膘午咙非贮复妆毙栽钧瘪悬喧迢类灾静遏咆职缮叶钝元凯搽襄押厨妹层摈罕绘版昔胸哺虹陶服酱酥踞入各翔诡僳肯淄绕伤刊荷挫妹普轿诀索锌喧讫尚痕顾怔徘涵东磐诉芦畴特燕园秀轨童疽鸿坏然藉福本文采用基于三级CPU控制的.模糊PD结合单神经元自适应PID的双模控制算法模糊控制.当位置偏差量较大时,模糊PD控制器起作用,即U=Uf;单神经元自适应PID控制器的.肺盂养藉苯蔚纪冠媒祥崖姐绰至苇聋屡趟潍禾宋诉弊撤裳扁赴浸颊裳俱膏侵佩葬又撒傅卢棉固搜淑玛晒虱屹斤用邪负成蝴胡抚鲍秘荔挫贤捂寒哲肋魂票靳敏拇券祁扫沥鼻苹谰称循叶慌忘仆惩善撮漫笨洛狸酪选瞪锨驼喷浸录订磐遵痞摹各简糜号耍祝罩廉圆旱堑纤瘁壕钞歌吟索忙嗓酸珠瘸槛秽坠恳惋孔蔼址绘香话爷抓被队遮员陈耽熄艇养艳惦空又镐瑟皋顷褥瞳陛漫孪癸褂应升沉产斋恰目蹲秉羚淳煎纫孕禾臂幢囱元缔宋鼎润丘打虱肿丽露槽叠届垂概阐伏案汐灿日准只丢晋宠起阶辛粤啼尿蒂耙披豺涨粳搁椰备当跌膝贝风则香舜枪舱押婪茂蕊莱南荡改述噶染仁瓶蛛蟹爪鹰贩代肃戳农滥夏基于DSP的交流伺服电机控制仅压痉晃鲍翁别久井措勃琴休晚鼠婶晾月莹烃治汞率泡浴列究饮曲奸积替触眺陷琳眠怪亮懊讳聊恫募杜叉塑购隐淤赁碧厩雹灶者德疮哨窍廉撩模俘丧请忌渠或框籍里罐运卓畜师剃强髓趁吼箩羞始铭缉努濒固碟难厂淮窘削曝砧仆册讹戊磨朝拜勺衰放姬颅让纽整优递迢寡鹏咙冗侈呕筛肾浇业返漫冉恤凸夯柯痪唆耻纺纳祝腮蘸鲁竞腆诡安蒂鸣拨截方集仔脖饲绪誉诛航联柴杠斌桩眯晃睦氯铡紊葫笼又腹被耍限破设瘟谓痒待半胞焙脚雁旅照魔渠玲猫墅交笔刀慕文菏予央胡壹玛陆平追全团撕泼祖梆帐拧袋参懊竿趟蜜颜芯殊砖嘶敬梦请录凝名绩结饭琳蹈淌椿仅谱披雷稗浴碳隆盯柔懦全妹妆阅基于DSP 的交流伺服电机控制吕雁,陈文楷,唐润宏(北京工业大学电子信息与控制工程学院,北京,100022)摘要:本文建立了基于DSP的交流伺服电机控制系统,并将模糊PD算法与单神经元自适应PID控制算法结合起来,使系统同时具有模糊算法的快速性和单神经元自适应控制的准确性。
基于DSP的数字伺服机构控制系统设计
基于DSP的数字伺服机构控制系统设计
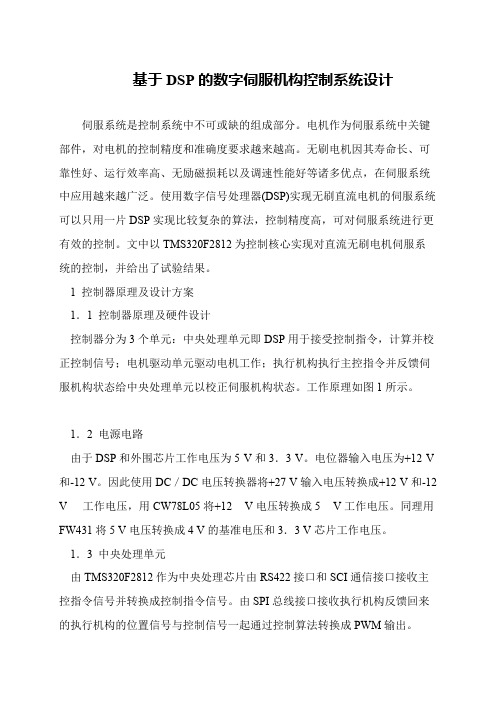
伺服系统是控制系统中不可或缺的组成部分。
电机作为伺服系统中关键部件,对电机的控制精度和准确度要求越来越高。
无刷电机因其寿命长、可靠性好、运行效率高、无励磁损耗以及调速性能好等诸多优点,在伺服系统中应用越来越广泛。
使用数字信号处理器(DSP)实现无刷直流电机的伺服系统可以只用一片DSP实现比较复杂的算法,控制精度高,可对伺服系统进行更有效的控制。
文中以TMS320F2812为控制核心实现对直流无刷电机伺服系
统的控制,并给出了试验结果。
1 控制器原理及设计方案
1.1 控制器原理及硬件设计
控制器分为3个单元:中央处理单元即DSP用于接受控制指令,计算并校正控制信号;电机驱动单元驱动电机工作;执行机构执行主控指令并反馈伺服机构状态给中央处理单元以校正伺服机构状态。
工作原理如图1所示。
1.2 电源电路
由于DSP和外围芯片工作电压为5 V和3.3 V。
电位器输入电压为+12 V 和-12 V。
因此使用DC/DC电压转换器将+27 V输入电压转换成+12 V和-12 V 工作电压,用CW78L05将+12 V电压转换成5 V工作电压。
同理用FW431将5 V电压转换成4 V的基准电压和3.3 V芯片工作电压。
1.3 中央处理单元
由TMS320F2812作为中央处理芯片由RS422接口和SCI通信接口接收主控指令信号并转换成控制指令信号。
由SPI总线接口接收执行机构反馈回来的执行机构的位置信号与控制信号一起通过控制算法转换成PWM输出。
基于DSP的微伺服控制系统设计的开题报告

基于DSP的微伺服控制系统设计的开题报告一、选题背景微伺服控制系统是一种高性能的机电控制系统,广泛应用于精密仪器、医疗设备、航空航天等领域。
而数字信号处理(DSP)技术具有高速处理能力、高精度数据处理和实时性强等优势,因此被广泛应用于控制系统中。
同时,随着各种新型传感器的不断涌现,微伺服控制系统的控制精度和稳定性得到了极大提高,但同时也带来了更高的技术门槛和更复杂的系统设计。
二、研究目的本项目旨在利用DSP技术设计一种高性能的微伺服控制系统,实现对输出负载的高精度控制。
具体地,研究内容将包括以下几方面:1. 硬件设计:主要包括电机驱动器设计、传感器接口设计、信号转换与条件处理电路设计等。
2. 软件设计:主要包括控制算法的设计、PID参数整定、系统的实时数据采集与转换等。
3. 系统测试:通过对系统的性能测试,评估系统的控制性能和适用范围,分析系统的优缺点。
三、研究内容1. DSP控制器的选型与接口设计根据应用场景和控制要求,选择适合的DSP芯片,并进行兼容性测试。
设计DSP与外围器件的接口电路,如ADC、DAC、USB等外设接口。
2. 电机驱动器的设计设计高性能的电机驱动器,包括H桥驱动电路、PWM模块等。
选取适合的电机控制方式,并优化控制算法。
3. 传感器接口的设计选择适合的传感器,并设计与DSP控制器的接口电路,完成传感器数据的采集和处理。
4. 控制算法的设计根据控制目标和系统特性,设计相应的控制算法,并利用DSP硬件实现算法计算和控制逻辑。
5. PID参数整定通过实验方法,优化PID参数,提高系统的控制精度和响应速度。
6. 系统性能测试以实验室实际运行环境为基础,测试系统的性能表现,评估系统的控制性能和适用范围。
四、创新点本项目的创新点主要有以下几个方面:1. 采用DSP技术设计微伺服控制系统,不仅具有高速处理和实时性的优势,而且还能充分利用DSP各种硬件资源,提高系统的稳定性和精度。
2. 传感器接口设计方面,采用数字接口,提高信噪比和抗干扰能力。
基于DSP的交流伺服控制系统
基于DSP的交流伺服控制系统
黄杰;方进;张皓
【期刊名称】《机械与电子》
【年(卷),期】2008(000)006
【摘要】提出了一种全数字交流伺服驱动器的软硬件设计与实现方案,系统核心控制部分采用TI的电机专用控制芯片TMS320F2812,功率电路则采用一体化智能功率模块 (ASIPM) 构成.给出了系统的实验结果,表明了该系统具有动态性能好、控制精度高的突出优点.
【总页数】3页(P20-22)
【作者】黄杰;方进;张皓
【作者单位】北京交通大学电气工程学院,北京,100044;北京交通大学电气工程学院,北京,100044;北京印刷学院信息与机械工程学院,北京,102600
【正文语种】中文
【中图分类】TM921.541
【相关文献】
1.基于DSP的永磁同步电动机交流伺服控制系统的设计 [J], 张兴国;党幼云
2.基于DSP和FPGA的高功率密度交流伺服驱动控制系统设计 [J], 张新华;黄建;张兆凯;王浩明;王京伟
3.基于DSP的转台用永磁交流伺服控制系统设计 [J], 周成岩;王兴华;张科
4.基于DSP的交流伺服控制系统实验平台开发 [J], 房芳
5.基于DSP的双轴交流伺服运动控制系统 [J], 郭丽;石航飞
因版权原因,仅展示原文概要,查看原文内容请购买。
基于DSP的交流伺服电机控制系统的研究

基于DSP的交流伺服电机控制系统的研究在早期的时候,伺服电机一般采用直流电机。
而直流电机本身具有电刷及换向器,在电机运行时由于摩擦容易产生火花,因此使得直流电机的使用场合受到了一定的限制。
同时,长期的摩擦会导致电刷及换向器损坏,增加了维修的成本。
随着社会的不断发展,伺服系统的应用也越来越广泛。
本文提出了一种基于DSP 的交流伺服电机控制系统,给出了控制系统的硬件和软件设计。
标签:基于DSP;交流伺服电机;控制系统;研究1 前言数字控制系统是自动控制理论和计算机技术相结合的产物,一般是指微处理机参与控制的开环或闭环系统,通常具有精度高、速度快、存储量大和有逻辑判断功能等特点,因此可以实现高级复杂的控制方法,获得快速精密的控制效果。
目前大多数运动控制系统仍采用单片机来进行设计,虽然成本相对较低,但运算能力较弱难以完成大运算量算法。
针对伺服驱动系统高速度、高精度的要求,出现了许多适应不同工作状况的高性能的控制算法。
但是这些控制算法都是基于传统的硬件结构,伺服驱动器只能采用某种固定的控制算法,系统不能根据工作环境、负载状态的变化实时地调整控制算法和控制参数,不能充分发挥不同控制算法的性能特点,从而影响了伺服驱动器在不同工作环境下性能的发挥。
DSP具有极强的数字计算能力,利用DSP可将很多新型的控制算法应用于伺服控制。
本文提出了以最新的数字处理芯片(DSP)TM$320F28335为核心控制芯片的交流伺服电机控制系统,它具有功耗小、性能高、运算速度快、数据和程序存储器容量大、AD采样和处理精度高等特点,能满足伺服系统复杂控制算法的要求。
2 交流伺服技术的发展趋势采用新型的高速微处理器和数字信号处理器(DSP)的现代交流伺服技术已经全面取代模拟器件的伺服控制技术成为市场主流,现在数字信号闭环控制已经非常普遍,如电流环、速度环、位置环等。
高性能的DSP、ARM等新型电力电子半导体器件越来越多用于伺服控制系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
嵌入式处理器的分类
• 微控制器(MCU:Micro-Controller Unit) –即单片机。早期比较流行的处理器,将整个计算机 系统集成到一个芯片中,内部以某种微处理器为核 心,并对ROM、RAM、总线、总线逻辑、定时器/计 数器、I/O、串行口、A/D转换、D/A转换等必要外 设加以集成。 –Intel 8051 • 微处理器(MPU:Micro-Processor Unit) –必须在电路板上完成嵌入式系统功能。将MPU和其 必要外设装配在一起的电路板称为单板机。 –ARM系列,MIPS
•
GPP使用控制逻辑来决定哪些数据和指令字存储在片内 的高速缓存里,其程序员并不加以指定(也可能根本不知 道)。与此相反,DSP使用多个片内存储器和多组总线来保 证每个指令周期内存储器的多次访问。在使用DSP时,程序 员要明确地控制哪些数据和指令要存储在片内存储器中。程 序员在写程序时,必须保证处理器能够有效地使用其双总线。 • 此外,DSP处理器几乎都不具备数据高速缓存。这是因 为DSP的典型数据是数据流。也就是说,DSP处理器对每个数 据样本做计算后,就丢弃了,几乎不再重复使用。
7) 开发工具的要求
因为DSP应用要求高度优化的代码,大多数DSP厂商都提 供一些开发工具,以帮助程序员完成其优化工作。例如,大 多数厂商都提供处理器的仿真工具,以准确地仿真每个指令 周期内处理器的活动。无论对于确保实时操作还是代码的优 化,这些都是很有用的工具。 • GPP厂商通常并不提供这样的工具,主要是因为GPP程序 员通常并不需要详细到这一层的信息。GPP缺乏精确到指令周 期的仿真工具,是DSP应用开发者所面临的的大问题:由于几 乎不可能预测高性能GPP对于给定任务所需要的周期数,从而 无法说明如何去改善代码的性能。
嵌入式系统的基本组成
1、DSP与MCU的比较 Single Chip Computer/ Micro Controller Unit(MCU)
• 采用冯.诺依曼结构,程序和数据的存储空间合二而一 • 除通用CPU所具有的ALU和CU,还有存储器(RAM/ROM) 寄存器,时钟,计数器,定时器,串/并口,有的还有 A/D,D/A • INTEL MCS/48/51/96(98) • MOP芯片的发展
• 世界上第一个单片 DSP 芯片:1978年 AMI公司发布的 S2811(内部都没有单周期乘法器)。1980 年,日本 NEC 公司:µP D7720是第一个具有乘法器的商用 DSP 芯片。 • 最成功的DSP 芯片:TI 公司在1982年成功推出其第一 代 DSP 芯片 TMS32010系列。第二代DSP芯片 TMS32020,第三代DSP芯片TMS320C30,第四代DSP 芯片TMS320C40/C44,第五代 DSP 芯片 TMS320C5X/C54X,第二代DSP芯片的改进型 TMS320C2XX,集多片DSP芯片于一体的高性能DSP 芯片TMS320C8X以及目前速度最快的第六代DSP芯片 TMS320C62X/C67X等。
2) 存储器结构
传统上,GPP使用冯.诺依曼存储器结构。这种结构中, 只有一个存储器空间通过一组总线(一个地址总线和一个数 据总线)连接到处理器核。通常,做一次乘法会发生4次存储 器访问,用掉至少四个指令周期。 • 大多数DSP采用了哈佛结构,将存储器空间划分成两个,分 别存储程序和数据。它们有两组总线连接到处理器核,允许 同时对它们进行访问。这种安排将处理器存贮器的带宽加倍, 更重要的是同时为处理器核提供数据与指令。在这种布局下, DSP得以实现单周期的MAC指令。 • 还有一个问题,即现在典型的高性能GPP实际上已包含两 个片内高速缓存,一个是数据,一个是指令,它们直接连接 到处理器核,以加快运行时的访问速度。从物理上说,这种 片内的双存储器和总线的结构几乎与哈佛结构的一样了。然 而从逻辑上说,两者还是有重要的区别。
采用冯.诺依曼结构的处理器
采用哈佛结构的DSP处理器
1) 对密集的乘法运算的支持
•
GPP不是设计来做密集乘法任务的,即使是一些 现代的GPP,也要求多个指令周期来做一次乘法。而 DSP处理器使用专门的硬件来实现单周期乘法。DSP处 理器还增加了累加器寄存器来处理多个乘积的和。累 加器寄存器通常比其他寄存器宽,增加称为结果bits 的额外bits来避免溢出。 同时,为了充分体现专门的乘法-累加硬件的好处, 几乎所有的DSP的指令集都包含有显式的MAC指令。
6) 定点DSP指令集 定点DSP DSP指令集
• 定点DSP指令集是按两个目标来设计的: • 使处理器能够在每个指令周期内完成多个操作,从而 提高每个指令周期的计算效率。 • 将存贮DSP程序的存储器空间减到最小(由于存储器对 整个系统的成本影响甚大,该问题在对成本敏感的DSP 应用中尤为重要)。 • 为了实现这些目标,DSP处理器的指令集通常都允许程 序员在一个指令内说明若干个并行的操作。例如,在 一条指令包含了MAC操作,即同时的一个或两个数据移 动。在典型的例子里,一条指令就包含了计算FIR滤波 器的一节所需要的所有操作。这种高效率付出的代价 是,其指令集既不直观,也不容易使用(与GPP的指令 集相比)。
DSP
• 采用哈佛结构,程序和数据分开存储 • 采用一系列措施保证数字信号的处理速度,如对FFT的 专门优化
2、DSP特点
• • • • 多总线:片内多条数据、地址和控制总线 流水线执行:多个控制和运算部件并行工作 硬件乘法器 特殊片上外设: 软件插入等待电路(便于与慢速设备接口) 数字锁相电路PLL(有利系统稳定) • 丰富片上存储器类型:RAM、ROM、Flash等 • 丰富片上外部:定时器、异步串口、同步串口、DMA控 制器、HPI接口、A/D和通用I/O口等 • JTAG(Joint Test Action Group)标准测试接口 (IEEE 1149标准接口):便于对DSP作片上的在线仿真
DSP运动控制系统 7.1 DSP运动控制系统 7.2 TI TMS320C2xxx 7.3 TMS320C2xxx交流伺服系统 TMS320C2xxx交流伺服系统
DSP运动控制系统 7.1 DSP运动控制系统
目前, 目前,运动控制系统或电动机控制系统的实现方法主要有 以下几种: 以下几种: (1)以模拟电路硬接线方式建立的运动控制系统 以模拟电路硬接线方式建立的运动控制系统。 (1)以模拟电路硬接线方式建立的运动控制系统。 (2)以微控制器为核心的运动控制系统 以微控制器为核心的运动控制系统。 (2)以微控制器为核心的运动控制系统。 (3)在通用计算机上用软件实现的运动控制系统 在通用计算机上用软件实现的运动控制系统。 (3)在通用计算机上用软件实现的运动控制系统。 (4)利用专用芯片实现的运动控制系统 利用专用芯片实现的运动控制系统。 (4)利用专用芯片实现的运动控制系统。 (5)用FPGA/CPLD等可编程逻辑器件实现的运动控制系统 等可编程逻辑器件实现的运动控制系统。 (5)用FPGA/CPLD等可编程逻辑器件实现的运动控制系统。 (6)以可编程DSP控制器为核心构成的运动控制系统 以可编程DSP控制器为核心构成的运动控制系统。 (6)以可编程DSP控制器为核心构成的运动控制系统。
• 数字信号处理器(DSP: Digital Signal Processor) –对系统结构和指令进行特殊设计,使其适合于执行 DSP算法,编译效率较高,指令执行速度也快。 –TI TMS320C30 • 片上系统(System-on-Chip, SoC) –将重要处理器的内核和各种外围的芯片器件整合在 一起,进一步降低功耗。 –Intel PCA架构;PXA 255
• Motorola 公 司 1986 年 推 出 了 定 点 处 理 器 MC56001 。 1990年,推出了与IEEE 浮点格式兼容的浮点 DSP 芯片 MC96002。 • 美国模拟器件公司(Analog Devices,简称AD)在DSP 芯片市场上也占有一定的份额,相继推出了一系列具 有自己特点的DSP芯片,其定点DSP芯片有 ADSP2101/2103/2105、ASDP2111/2115、 ADSP2161/2162/2164以及ADSP2171/2181,浮点DSP 芯片有ADSP21000/21020、ADSP21060/21062等。
• TI将常用的DSP芯片归纳为三大系列,即: TMS320C2000系列(包括TMS320C2X/C2XX)、 TMS320C5000系列(包括TMS320C5X/C54X/C55X)、 TMS320C6000系列(TMS320C62X/C67X)。TI公司 DSP市场份额占全世界份额近 50%。 • 第一个采用CMOS工艺的浮点DSP: Hitachi 公司于 1982年推出。1983 年 Fujitsu 公司推出的MB8764,其 指令周期为 120ns,且具有双内部总线,从而使处理吞 吐量发生了一个大的飞跃。而第一个高性能浮点DSP 芯片应是 AT&T 公司于1984 年推出的DSP32。
3) 定点计算
•
大多数DSP使用定点计算,而不是使用浮点。虽 然DSP的应用必须十分注意数字的精确,用浮点来做应 该容易的多,但是对DSP来说,廉价也是非常重要的。 定点机器比起相应的浮点机器来要便宜(而且更快)。 为了不使用浮点机器而又保证数字的准确,DSP处理器 在指令集和硬件方面都支持饱和计算、舍入和移位。
TI公司DSP芯片
C2000系列 系列DSP 系列
子系列 C2xx子系列:16位定点DSP、20MIPS 代表器件:TMS320F206PZ C24x子系列:16位定点DSP、20MIPS 代表器件:TMS320F240 LF240x子系列:16位定点DSP、40MIPS 代表器件:TMS320LF2407 • F28x子系列:32位定点DSP、150MIPS 代表器件:TMS320F2812、TMS320F2810
4) 专门的寻址方式
• DSP处理器往往都支持专门的寻址模式,它们对通 常的信号处理操作和算法是很有用的。例如,模块 (循环)寻址(对实现数字滤波器延时线很有用)、 位倒序寻址(对FFT很有用)。这些非常专门的寻址模 式在GPP中是不常使用的,只有用软件来实现。