海量数据采集系统硬盘控制器
simatic的组成及各主要作用

simatic的组成及各主要作用simatic是西门子推出的一款自动化系统,它由多个组成部分组成,每个部分都有着不同的作用和功能。
下面将详细介绍simatic的组成及各主要作用。
1. PLC(可编程逻辑控制器)PLC是simatic系统的核心组成部分,它负责接收和处理来自传感器、执行器等设备的信号,并根据预设的程序逻辑进行运算和决策,控制各种机械和电气设备的运行。
PLC具有高可靠性、高精度和高稳定性的特点,广泛应用于工业自动化领域。
2. HMI(人机界面)HMI是simatic系统的用户界面,它提供了人机交互的方式,使操作人员能够监视和控制整个自动化系统。
HMI可以通过图形化界面显示实时数据、报警信息、设备状态等,同时也可以通过触摸屏或键盘进行操作和调整参数。
HMI的主要作用是简化操作操作流程,提高生产效率。
3. SCADA(监控与数据采集系统)SCADA是simatic系统中的监控与数据采集系统,它负责对整个自动化系统进行监控和数据采集。
SCADA可以实时监测和记录各种设备的状态、运行数据和生产过程等信息,并将这些信息传输给上位机或云平台进行分析和处理。
通过SCADA系统,用户可以实现对生产过程的实时监控和远程控制,提高生产效率和质量。
4. 通信模块通信模块是simatic系统中的重要组成部分,它负责将PLC、HMI、SCADA等设备之间的数据进行传输和交换。
通信模块可以通过以太网、串口、无线等方式实现设备之间的通信,使各个设备之间能够实时传递数据和指令,保证整个自动化系统的正常运行。
5. 数据存储与处理设备数据存储与处理设备是simatic系统中的重要组成部分,它负责对采集到的数据进行存储和处理。
数据存储与处理设备可以是内存、硬盘、数据库等形式,它能够对大量的数据进行存储和管理,并提供相应的处理算法和分析工具,帮助用户进行数据分析和决策。
6. 工程软件工程软件是simatic系统中的关键组成部分,它提供了对整个自动化系统的配置、编程和调试等功能。
计算机控制系统典型结构

计算机控制系统典型结构典型的计算机控制系统结构如下:1.传感器传感器是计算机控制系统中的重要组成部分,用于感知环境变化并将其转化为电信号。
传感器可以测量温度、湿度、压力、光照强度、速度等物理量,将这些物理量转化为电信号,并输入给控制系统。
2.数据采集和信号处理模块数据采集和信号处理模块用于接收传感器传输的信号,并对信号进行处理和转换。
该模块主要包括模数转换器(A/D转换器),能够将模拟信号转化为数字信号;数字信号处理芯片,用于对数字信号进行滤波、放大、调制等处理。
3.控制器控制器是计算机控制系统中的核心部分,负责生成控制信号,并对执行器进行控制。
控制器根据传感器采集到的数据,结合预设的控制算法,计算出相应的控制信号,并将其输出给执行器。
4.执行器执行器是计算机控制系统中的输出部分,用于对控制信号进行物理操作。
执行器可以是电动机、电磁阀、液压缸等,它们根据收到的控制信号进行动作,将能量转化为机械运动或其他形式的输出。
5.人机界面人机界面使人们能够与计算机控制系统进行交互,包括显示器、键盘、触摸屏等。
通过人机界面,用户可以监控系统运行状态、设置参数、接收报警信息等。
6.通信模块通信模块用于与其他系统或设备进行数据交换和通信。
它可以实现计算机控制系统与其他控制系统、计算机网络或外部设备之间的数据传输。
通信模块可以使用串口、以太网、无线传输等方式。
7.控制算法控制算法是计算机控制系统中的重要组成部分,它决定着控制系统的性能和稳定性。
控制算法根据传感器采集的数据和预设的控制目标,对系统进行调度和控制。
常见的控制算法包括PID控制算法、模糊控制算法、神经网络控制算法等。
8.数据存储与处理数据存储与处理模块用于存储和处理控制系统中产生的数据。
它可以将数据存储在内存、硬盘或其他存储介质中,以供后续分析和决策使用。
数据处理模块则根据需要对存储的数据进行分析、计算和统计。
以上是计算机控制系统的典型结构,其组成部分相互协作,完成物理操作的控制和调度。
SATA硬盘控制器的FPGA实现

SATA硬盘控制器的FPGA实现贾效玲;张刚;张博【摘要】The paper designs a high-performance SATA controller IP core. It takes SATA 2.5 protocol for reference and is implemented on the basis of FPGA of Virtex-5 family of Xilinx with modular design concept in VHDL language. A platform for IP core performance verification is built. The test results indicate that the controller IP can realize many operations,such as reading,writing, device reset,identification and so on. And it has good stability. Meanwhile,it also finishes the operating system drivers of PetaLinux. It can facilitate the application of embedded systems.%设计一款高性能的SATA硬盘控制器IP核。
基于Xilinx公司的Virtex-5系列FPGA,参考SATA2.5协议,运用VHDL硬件描述语言,采用模块化的设计理念,完成IP核的设计。
搭建了验证平台,对IP核的性能进行了测试,经测试该控制器IP核能正确地完成读、写、设备复位、设备识别等操作,且稳定性良好。
同时编写了PetaLinux操作系统下的驱动程序,便于嵌入式系统的应用。
【期刊名称】《火力与指挥控制》【年(卷),期】2016(041)009【总页数】4页(P182-184,188)【关键词】SATA2.5;控制器;FPGA;VHDL【作者】贾效玲;张刚;张博【作者单位】太原理工大学信息工程学院,太原 030024;太原理工大学信息工程学院,太原 030024;太原理工大学信息工程学院,太原 030024【正文语种】中文【中图分类】TP333.2随着嵌入式技术的发展,嵌入式系统对存储器容量的要求越来越高,特别是图像采集、视屏监控等系统。
USB2.0控制器CY7C68013的接口设计实

摘要:介绍了一种基于usb2.0控制器cy7c68130的usb-ata接口,将普通硬盘转化为usb mass -storage的解决方案,文中给出了利用gpif实现该方案的相关设计方法。
关键词:usb2.0 ata接口 cy7c68130 gpif1 引言usb(universal serial bus)接口以其速度快、功耗低、支持即插即用(plug & play)、使用安装方便等优点而得到了广泛的应用。
目前usb2.0标准的传输速度已达480mb/s,这使得usb可以推广到硬盘、信息家电网络产品和其它快速外设。
在某些应用场合,如基于硬盘的大容量数据采集与分析系统中,为了使用方便,需要将普通硬盘转化成海量存储器,这样在使用时就不需关机重启或打开机箱来安装。
本文介绍一种利用带usb接口的单片机芯片cy7c68013来控制普通硬盘的读写,从而半普通硬盘转化为usb2.0海量存储器的可行方案,本系统可扩展,完全可用于实现基于硬盘的大容量数据采集与分析系统。
2 硬件设计2.1 usb接口芯片本设计选用的是cypress公司的ez-usbfx2系列芯片中的cy7c68013,这是一种带usb接口的单片机芯片,虽然采用低价的8051单片机,但仍然能获得很高的速度。
它包括一个8051处理器、一个串行接口引擎(sie)、一个usb 收发器、一个8.5kb片上ram、一个4 kb fifo存储器及一个通用可编程接口(gpif)。
fx2可提供全面集成的解决方案。
它有56ssop、100tqfp、128tqfp三种封装,本设计选用占用电路板空间较少的56ssop封装。
如果要进行扩展,也可选用128tqfp封装。
2.2 ata接口ata接口是在st506的基础上改进而成的,它将控制器集成到驱动器中,采用8个端口寄存器(即命令寄存器)来完成对硬盘的读写,ata有两种工作模式:pio 模式和dma模式。
本设计采用的dma传输模式不需要处理器参与整个数据传输过程,而是由i/o口直接将数据传送到存储器中,从而节约大量的cpu时间以更好的处理其它事件。
基于USB控制器的大容量数据采集系统设计

图1 虚线左 边 中间 的 U Y T F A A驱 动层 将应 用程 序 的访 问转换 成 U I A A命 令/ 据 F或 T 数 格式 ,与外部存 储设 备之 间按 照子 规范 U I A A 的定 义进 行命 令/ 态/ F或 T 状 数据 的交换 ;最
底层 则是 U B传 输驱 动 ,负 责将 上层 的 U I T S F/ A数 据发 送 到 U B总线 上 以及 接收从 存储 A S 设 备返 回的状态, 数据 。C I uk nyA AU I U BMas t ae类规 范 中 4个 独立 的 子 B/ lO l T / F 是 S s o g B / Sr 类规 范的 简称 。前两个 子规 范定 义 了数 据偷 令/ 态 在 U B上 的传 输方 法 。B lO l 状 S uk ny传输 规 范仅 使 用 B l 点 传 送 数 据/ 令/ 态 。C I uk端 命 状 B 传输 规 范 则 使 用 C nrl ukItr p 三 ot / l/ er t oB n u 种类型 的端点 进行数 据/ 令, 态传送 。后 两个 子规 范则定 义 了存 储介 质 的操作 命 令 。A 命 状 —
2 US B大 容量 存 储 设 备 协 议 及 分析
基 于 U B的 大 容 量 S 数据 采 集 系 统 的设 计 , 主 要 是 要 实 现 嵌 入 式 U B主 机 。 要 想 设 计 出 S
能 直 接 读 写 U 盘 的 嵌 入 式 U B主 机 ,就 必 须 理 S
要 。不便携 带计算 机 ,此 时采用 小型 移动设 备保存 数据 的需求 就变得 日益迫切 。U盘作 为
移 动存储设 备 ,以体积小 、速 度高 、抗震动 、通用性 强 的特点倍 受青 睐 ,因此 ,在 雷达数 据 采集系统 中开发 出嵌入 式 U B主机控 制 U盘作 为数 据存储 器 ,将 具有 良好 的实用价 值 。 S
车联网系统

车联网系统定义车联网系统,是指通过在车辆仪表台安装车载终端设备,实现对车辆所有工作情况和静、动态信息的采集、存储并发送。
系统分为三大部分:车载终端、云计算处理平台、数据分析平台,根据不同行业对车辆的不同的功能需求实现对车辆有效监控管理。
车辆的运行往往涉及多项开关量、传感器模拟量、CAN信号数据等等,驾驶员在操作车辆运行过程中,产生的车辆数据不断回发到后台数据库,形成海量数据,由云计算平台实现对海量数据的“过滤清洗”,数据分析平台对数据进行报表式处理,供管理人员查看。
23简介车联网系统分为三大部分:车载终端、云计算处理平台、数据分析平台。
车载终端采集车辆实时运行数据,实现对车辆所有工作信息和静、动态信息的采集、存储并发送。
车载终端由传感器、数据采集器、无线发送模块组成,车辆实时运行工况包括驾驶员的操作行为、动力系统工作参数数据等;由云计算处理平台处理海量车辆信息,对数据进行“过滤清洗”;数据分析平台则负责对数据进行报表式处理,供管理人员查看。
中国物联网校企联盟认为:未来的车联网系统可以使感知更加透彻,除了道路状况外,还可以感知各种各样的要素——污染指数、紫外线强度、天气状况、附近加油站……同时还可以感知驾驶员的身体状况、驾驶水平、出行目的……路线的不再是“快速到达目的地”,而是“最适合驾驶员,最适合这次出行”,汽车导航将由“以路为本”变为“以人为本”。
[1]4概念ITS即智能交通。
将先进的传感器技术、通信技术、数据处理技术、网络技术、自动控制技术、信息发布技术等有机运用于整个交通运输管理体系而建立起的一种实时的、准确的、高效的交通运输综合管理和控制系统。
CANCAN是控制器局域网络(Controller Area Network,CAN)的简称,是由研发和生产汽车电子产品著称的德国BOSCH公司开发了的,并最终成为国际标准。
是国际上应用最广泛的现场总线之一。
在北美和西欧,CAN总线协议已经成为汽车计算机控制系统和嵌入式工业控制局域网的标准总线,并且拥有以CAN为底层协议专为大型货车和重工机械车辆设计的J1939协议。
大数据采集解决方案
大数据采集解决方案随着信息技术的不断发展和互联网的普及,大数据已成为现代社会中不可忽视的一部分。
大数据采集是指收集、处理和分析海量数据的过程,以获取有价值的信息和洞察力。
在这篇文章中,我们将探讨大数据采集的重要性以及一种解决方案,以应对大数据时代带来的挑战。
一、大数据采集的重要性在当今社会中,大数据采集具有重要的价值和意义。
它可以为企业提供深入了解市场和客户需求的机会,为决策者提供基于数据的决策支持,促进经济发展和产业升级。
以下是几个大数据采集的重要性:首先,大数据采集可以帮助企业更好地了解客户需求。
通过收集和分析大量的数据,企业可以获得对客户行为和偏好的深入洞察,从而调整产品和服务,提高客户满意度和忠诚度。
其次,大数据采集可以帮助企业预测市场趋势和竞争对手的动态。
通过分析市场和竞争对手的数据,企业可以及时调整策略,抓住市场机遇,提前应对潜在风险。
最后,大数据采集可以帮助企业提高运营效率和降低成本。
通过对供应链、生产过程等方面的数据进行分析,企业可以找到优化点,提高效率,减少资源浪费,降低生产成本。
二、为了有效地进行大数据采集,需要用到一种合适的解决方案。
在这里,我们介绍一种常用的大数据采集解决方案,即分布式数据采集系统。
分布式数据采集系统是一种基于云计算和分布式计算技术的解决方案。
它通过将数据采集任务分散到多个节点进行并行处理,实现高效、可扩展的数据采集。
以下是该解决方案的主要组成部分:1. 数据采集器:数据采集器是分布式系统的核心组件,负责从各种数据源,如网页、API接口、传感器等,收集数据并将其转换为统一的格式,以便后续的处理和分析。
2. 数据存储:数据存储是指用于存储采集到的数据的系统或服务。
常见的数据存储方式包括关系型数据库、NoSQL数据库、分布式文件系统等。
选择适合的数据存储方式可以提高数据访问速度和数据的稳定性。
3. 数据处理和分析:在采集到的数据存储后,需要对其进行处理和分析,以发现隐藏在数据中的规律和价值。
工业数据采集技术与应用

工业数据采集技术与应用一、引言工业数据采集技术是当前互联网技术进步下,工业生产自动化的重要组成部分。
数据采集技术能够对生产环节进行全面监测,帮助企业提高生产效率,降低生产成本,提高产品质量。
本文将介绍工业数据采集技术的原理、应用和未来发展,以及如何结合人工智能等技术更好地解决企业生产问题。
二、工业数据采集技术的原理1. 传感器技术传感器是工业数据采集技术的关键组成部分,能够对生产现场各种物理量进行测量。
传感器技术的重要特点是能够快速实时采集并传输各种数据。
传感器常用的测量参数包括温度、湿度、速度、压强、流量等。
2. 控制器技术控制器是计算机控制采集系统的关键部分,主要用于数据采集、数值计算和处理各种控制信号。
控制器通常分为开环控制和闭环控制两种,开环控制通过读取传感器输入的信号,并经过编程处理信号后输出控制信号;闭环控制则根据反馈信号进行动态调整,使生产系统达到最优状态。
3. 通信协议技术通信协议是工业数据采集技术中重要的数据传输手段,不同的协议有不同的传输速率和数据传输精度。
目前较为常用的通信协议有 RS-485、MODBUS、CAN、PROFIBUS等,它们都能够保证数据的可靠传输,具有广泛的适用性。
三、工业数据采集技术的应用工业数据采集技术将各种传感器信息进行合理利用、分析。
可以非常好的监管生产生产流程,拥有以下的应用范围。
1. 能源管理工业企业大多需要较高的能源供给,然而能源成本又居高不下。
通过数据采集技术,生产流程中每个生产环节消耗的电、水、气等能源量均可精确测量,最终计算出各种资源的消耗情况,从而帮助企业进行节能降耗。
2. 生产管理生产流程中需要严格控制各个工序的生产压力、温度、湿度等参数,通过工业数据采集技术,生产管理人员可以实时监测这些参数的变化,从而进行有效的生产控制,更好地保证产品生产质量。
3. 安全管理在工业生产过程中,存在着一定的安全隐患,如漏电、爆炸、火灾等。
数据采集技术可以实时监测这些安全隐患并进行预警,灵敏地防范事故的发生,从而提高工作场所的安全性能。
工业控制系统中的数据采集与处理技术考核试卷

2.在数据采集过程中,信号调理设备不是必须的,因为传感器可以直接连接到数据采集卡。()
3.模数转换器(ADC)是将模拟信号转换为数字信号的关键设备。()
4.所有工业通讯协议都具有相同的传输速率和实时性要求。()
5.数据预处理是数据处理的第一步,它包括数据清洗、数据转换等操作。()
A.模数转换器(ADC)
B.电压频率转换(VFC)
C.数字信号处理器(DSP)
D.电流电压转换(I/V)
5.下列哪种协议是工业控制系统中常用的通讯协议?()
A. HTTP
B. FTP
C. MODBUS
D. SMTP
6.在数据处理中,数据的校验方法一般不包括以下哪一项?()
A.奇偶校验
B.循环冗余校验(CRC)
8.在数据采集系统中,_______是用于防止信号干扰和提高信号质量的重要设备。()
9.数据采集与处理的一个重要应用是_______,它用于实时监控和控制生产过程。()
10.在工业大数据分析中,_______技术可以帮助我们发现数据中的潜在模式或趋势。
四、判断题(本题共10小题,每题1分,共10分,正确的请在答题括号中画√,错误的画×)
A. LabVIEW
B. MATLAB
C. Microsoft Office
D. SCADA
16.在数据处理中,以下哪个步骤是数据预处理的一部分?()
A.数据可视化
B.数据清洗
C.数据分析
D.数据存储
17.以下哪个设备不是用于信号调理的?()
A.放大器
B.滤波器
C.采样保持电路
D.模数转换器
DAS

• 三、数据采集系统的主要功能 • 经过较长时间的开发和应用实践,300MW 经过较长时间的开发和应用实践, 及以上发电机组数据采集系统的功能已经 比较完善和成熟。归纳起来, 比较完善和成熟。归纳起来,这些功能主 要有:报警、显示、打印、存储、 要有:报警、显示、打印、存储、统计分 析和操作指导等。 析和操作指导等。
• 数据采集系统经历了模拟显示向数字处理、显示、 数据采集系统经历了模拟显示向数字处理、显示、 存储发展的过程,大致可分为单元仪表、组合仪表、 存储发展的过程,大致可分为单元仪表、组合仪表、 组件组装仪表、小型计算机、 组件组装仪表、小型计算机、微机分散控制系统五 个阶段。由于以微处理器为基础的微型计算机及数 个阶段。 据通信网络的广泛应用, 据通信网络的广泛应用,微机分散控制系统进人了 机组自动化领域, 机组自动化领域,使得数据采集系统不仅包括了对 现场热工参数的数据处理、显示、存储、 现场热工参数的数据处理、显示、存储、打印等基 本功能,而且在运行操作指导、故障分析、 本功能,而且在运行操作指导、故障分析、统计报 表等方面取得了长足的发展。 表等方面取得了长足的发展。 • 随着发电机组的容量增大,发电过程对数据采集系 随着发电机组的容量增大, 统的依赖性越来越大, 统的依赖性越来越大,传统的热控系统已不能满足 机组安全、经济运行的要求。 机组安全、经济运行的要求。微机分散控制系统顺 应了这一电力发展阶段, 应了这一电力发展阶段,使数据采集系统不仅满足 了机组运行的基本要求,而且其高智能化、 了机组运行的基本要求,而且其高智能化、高可靠 性的优势,为机组安全经济运行提供了可靠的帮助。 性的优势,为机组安全经济运行提供了可靠的帮助。
• (三)打印 三 打印 • 计算机应用于发电机组数据采集系统的一个显著 优势在于它的储存能力, 优势在于它的储存能力,数据可以存储并可重复 使用。但由于存储介质的空间有限, 使用。但由于存储介质的空间有限,数据的保留 时间也有限,所以, 时间也有限,所以,打印输出成为数据记录的一 种主要形式, 种主要形式,并在计算机监控系统中得到广泛应 用。 打印输出的主要内容有: 打印输出的主要内容有: • 1.报警打印 报警出现时即时打印,报警消除时 报警出现时即时打印, . 打印输出。 打印输出。 • 2.日志打印 定时打印有关参数,分班、日、周、 定时打印有关参数,分班、 . 年等不同打印周期。 月、年等不同打印周期。设计时可能根据现场需 要定义过程变量是否需要打印, 要定义过程变量是否需要打印,并可以在工程师 工作站上修改。 工作站上修改。 • 3.事故顺序记录 通过打印,记录事故顺序记录 通过打印, . 输出的机组主、 仪(SER)输出的机组主、辅设备故障发生的顺序。 输出 数据采集系统的报警功能包括模拟量报警、开关量报 数据采集系统的报警功能包括模拟量报警、 警和监控设备状态报警等方面。 警和监控设备状态报警等方面。 • 模拟量报警,是指现场采集的模拟量或系统输出的模 模拟量报警, 拟量超过其给定值,经计算机判断, 拟量超过其给定值,经计算机判断,在CRT或光字牌 或光字牌 上显示的过程。 上显示的过程。 • 开关量报警,是指现场采集的开关量或经系统输出的 开关量报警, 开关量发生状态翻转,经计算机判断, 开关量发生状态翻转,经计算机判断,在CRT或光字 或光字 牌上显示的过程。 牌上显示的过程。 • 报警情况既可以在任何包含已报警的模拟量的监视画 面上显示,又可以通过其他画面上的状态报警栏显示, 面上显示,又可以通过其他画面上的状态报警栏显示, 提醒运行操作人员注意, 提醒运行操作人员注意,同时还可以通过报警总貌查 看报警变化情况。对于分散控制系统, 看报警变化情况。对于分散控制系统,报警还可触发 CRT画面,根据预先拟定的步骤变化,使运行操作人 画面, 画面 根据预先拟定的步骤变化, 员迅速、准确地查看到报警内容。 员迅速、准确地查看到报警内容。
一种高可靠性的数据采集系统
载、 载 、 舰 车载 等许 多特殊应 用环 境对 数据 录取装 置 也提 出 了新 的要 求 , 何 满 足特 殊 环 境 下 的数 据 录 如
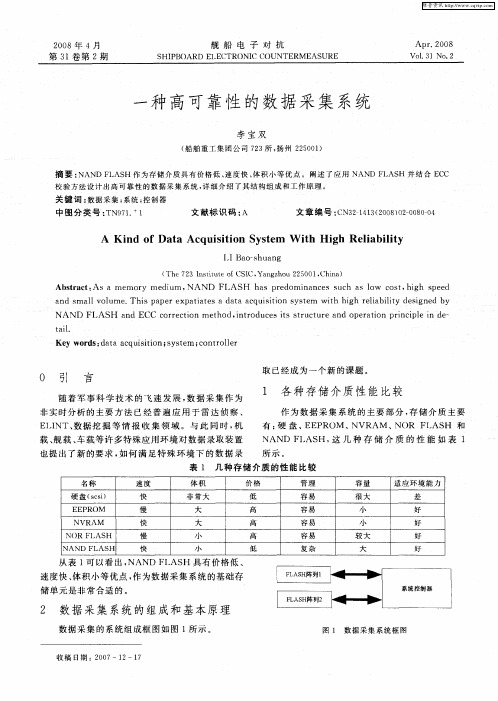
NAN I H, 几 种 存 储 介 质 的 性 能 如 表 1 D F AS 这
所示 。
表 1 几种 存储 介质 的性 能 比较
名 称 速 度 体积 价 格 管 理 容 量 适 应 环境 能 力
L - - - - - - - - - u u . — , ,. . . . . . . . ---.-----—- — .. . ......一 . l 1
一
2 数 据 采 集 系统 的组 成和 基 本 原 理
数 据采集 的系统组 成框 图如 图 1 示 。 所
. ................ 1 .............. . .... .......... .
维普资讯
20 0 8年 4月
舰 船 电 子 对 抗
S PB HI OARD ElE CTRONI C COUNTE RM EAS URE
A pr 2 0 .08
Vo131 o . N .2
第 3 卷第 2 1 期
一
种 高可 靠性 的数据 采 集 系统
t i. al
Ke r s: a a a q s ton; y t m ; o r l r y wo d d t c uiii s s e c ntole
0 引 言
随着 军 事科 学 技 术 的飞 速 发展 , 据 采 集作 为 数 非实 时分 析 的主要 方 法 已 经普 遍 应 用 于雷 达 侦 察 、
硬 盘 (Ci S S)
EEP R0M NVRAM N(R ) FIASH
【计算机工程与设计】_嵌入式文件系统_期刊发文热词逐年推荐_20140727

2009年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52
53 54 55 57 58 59 60 61 62 63 64 65 66
udp协议设计 simd s3c2410 realvideo pc/os-ⅱ ntfs文件系统 mplayer minigui linux fat32文件系统 fat16 ch375芯片 arm7处理器 api
推荐指数 3 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2010年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30
科研热词 推荐指数 嵌入式系统 2 龙芯处理器 1 高清 1 驱动 1 非连续写 1 闪存 1 链接器配置 1 遥测遥控 1 逻辑写 1 通用分组无线业务 1 连续写 1 远程升级 1 系统架构 1 移植 1 现场可编程门阵列 1 数字信号处理器启动 1 引导程序 1 存储管理 1 媒体播放器 1 复杂指令集计算机 1 体系结构描述语言 1 vxworks6.x实时操作系统 1 vxbus虚拟总线 1 sd卡 1 pmon系统 1 mplayer 1 java代码生成模板 1 gstreamer 1 extended block device扩展块设备 1 eclipse建模框架 1
REFTEKDAS数据采集系统简要使用说明书-地震台阵探测试验室

进口仪器简要使用说明书(72A-08)中国科学院地质与地球物理研究所地震台阵探测实验室2005-3进口仪器简要使用说明书(72A-08)一仪器各组成部分:地震计(摆)、采集器(DAS)、SCSI硬盘、GPS、各种连线、分线盒、控制器、电瓶、充电器。
**注意:打开仪器外壳易损坏仪器,非本台阵仪器维修人员不准打开仪器外壳。
注意仪器防水、防潮,GPS不宜架设过高,防止雷击。
二连线说明:(-)各单元连接状况:1 以DAS为中心:电源线:(1)输入线(黑线或花线)由电瓶接至POWER口的A或B。
(2)输出线(黑线或花线)由另一POWER口接至硬盘的POWER口。
数据线:(橙色线,一般较粗,非插孔型)由CH 1-3口,接至地震计(摆)。
GPS线:(橙色线,一般较细,插孔型,六针),由GPS口,接至GPS。
SCSI线:SCSI线(插孔型):由SCSI口,接至硬盘的两个SCSI口之一。
COMM(Xmodem)线:是笔记本同采集器的通信线。
由DAS的COMM口接至笔记本TERMINAL线:是笔记本同采集器的窜口通信线。
由DAS的terminal口,接至笔记本。
2 以硬盘为中心:电源线:由POWER口,接至DAS。
SCSI线:由SCSI A或B,接至DAS。
3 以地震计为中心:与分线盒连线:由地震计,接至分线盒。
4 以分线盒为中心:地震计电源线:由POWER口,接至电瓶。
数据线:由RECORDER,接至DAS的CH 1-3。
与摆连线:由SENSOR口,接至地震计。
与控制器线:由CONTROL口,接至控制器,可以不用控制器,可以不连接。
5 以控制器为中心:由控制器,接至分线盒CONTROL口,可以不用控制器。
6 以充电器为中心:输入线:接220电源。
输出线:接电瓶,接线前先测试充电器输出极性,确认“+”端接至电瓶“+”极,“-”端接至电瓶“-”极。
7 以电瓶为中心:(1)电源输入线(充电器或太阳能控制器的输出线)。
(2)地震计电源线。
自动化检测系统及其自动化检测方法

自动化检测系统及其自动化检测方法一、引言自动化检测系统是指利用先进的技术手段和设备,对各种产品、设备或者系统进行自动化检测的系统。
本文将介绍自动化检测系统的基本原理、组成部份以及常用的自动化检测方法。
二、自动化检测系统的基本原理自动化检测系统的基本原理是通过采集、处理和分析被检测物体的信号或者数据,以实现对其性能、质量或者其他指标的评估。
其基本原理可以总结为以下几点:1. 采集信号:通过传感器或者其他检测设备采集被检测物体的信号,如温度、压力、电流等。
2. 信号处理:对采集到的信号进行滤波、放大、数字化等处理,以提高信号的质量和准确性。
3. 数据分析:利用计算机或者其他数据处理设备对处理后的信号进行分析,提取实用的信息和指标。
4. 结果评估:根据分析得到的数据和指标,对被检测物体的性能、质量或者其他指标进行评估和判定。
三、自动化检测系统的组成部份自动化检测系统通常由以下几个组成部份构成:1. 传感器:用于采集被检测物体的信号,如温度传感器、压力传感器等。
2. 信号处理器:对采集到的信号进行处理,如滤波、放大、数字化等。
3. 控制器:控制整个自动化检测系统的运行,包括信号采集、处理和数据分析等。
4. 数据存储器:用于存储采集到的信号和分析得到的数据,如硬盘、存储卡等。
5. 显示器:显示采集到的信号和分析得到的数据,以便用户进行观察和评估。
6. 用户界面:提供给用户操作和控制自动化检测系统的界面,如触摸屏、键盘等。
四、常用的自动化检测方法自动化检测系统可以采用多种方法对被检测物体进行评估和判定,以下是其中几种常用的自动化检测方法:1. 基于图象处理的检测方法:利用摄像机或者其他图象采集设备采集被检测物体的图象,通过图象处理算法对图象进行分析,提取实用的信息和指标。
2. 基于声音分析的检测方法:利用麦克风或者其他声音采集设备采集被检测物体的声音,通过声音分析算法对声音进行分析,提取实用的信息和指标。
3. 基于振动分析的检测方法:利用加速度计或者其他振动采集设备采集被检测物体的振动信号,通过振动分析算法对振动信号进行分析,提取实用的信息和指标。
基于RK3358的电力系统智能化设计

设计应用技术RK3358的电力系统智能化设计王坤阳(佳源科技股份有限公司,江苏南京国内的电力系统正面临着电网布局高度复杂、极高的行业标准、严格的用户需求以及数字化升级等机遇核心板,将数字技术加持到电力系统智能化领域,有助于电力系统提升整体的感知能力、管理水平以及运行效率,不断加强电力强国的智能化建设。
随着智能化电力系统的愈加完善,农业生产也会从中受益良多,不仅可以节约成本,提高农业生产效率,还能提供安全、稳定、便捷的电力服务。
电力系统智能化为农业生产提供质优价廉的电力服务,能够支持越来越多的新型农业生产设备投入农业生产领域,对于农作物产量的提高、品质的优化、农业生产资源的整合、农业产业的优化布局等都会产生非常积极的作用。
核心板;电力系统智能化;农业生产效率Intelligent Design of Power System Based on RK3358WANG Kunyang(Jiayuan Technology Co., Ltd., Nanjingis facing opportunities and状况、电价方案以及线损模式等,因此智能化的电力系统必须保证稳定运行。
电力系统智能化的客户端交互运行如图2所示,考虑后期数据量比较大,为保证其安全、稳定,应采用一主多从的方式进行部署。
当一台主机宕机后,备机能够及时替换,保证电网服务能持续运行。
采用一主多从的模式具备以下几个优 点:一是数据结构简单,易于扩展;二是支持海量数据读写;三是处理速度快;四是响应速度快;五是支持高并发;六是支持多种语言进行开发;七是支持多种数据类型。
客户端客户端客户端设备设备设备设备设备图2 电力系统智能化的客户端交互运行2.3 电力系统智能化通信过程的主从交互电力系统智能化通信过程的主从交互如图3所示。
电力系统中产生的海量信息需要存储,智能化电力系统采用MySQL 数据库进行关系型数据存储。
日常业务数据的存储,可以为用户交互提供可靠的数据保障,采用双主机模式,保证数据实时同步备份,出现宕机的情况则能够及时替换。
便携式计算机测控系统的组成_概述及解释说明
便携式计算机测控系统的组成概述及解释说明1. 引言1.1 概述:随着科技的不断进步和发展,便携式计算机测控系统在各个领域中的应用越来越广泛。
它通过集成多种硬件和软件组件,实现了对各种设备、仪器进行控制和数据采集的功能。
这种系统具有小巧便携、灵活可靠、高度集成等特点,在工业生产、农业科研、医疗诊断等领域都具有重要意义。
1.2 文章结构:本文分为五个部分进行论述。
首先是引言部分,对便携式计算机测控系统做一个概述,并介绍文章的结构和目标。
其次是便携式计算机测控系统的组成部分,包括系统硬件组成、系统软件组成以及数据传输与处理方面的内容。
然后对便携式计算机测控系统进行深入解释,讨论其定义、应用领域以及优势所在,并展望了未来的发展趋势。
接下来是正文内容一,详细阐述了该系统的一些要点,并提供相关解释和说明。
最后是结论和总结部分,总结了本文的主要发现和结果,同时提出了进一步研究的建议。
1.3 目的:本文旨在全面介绍便携式计算机测控系统的组成,并解释说明其在各个领域中的应用和优势。
通过对系统硬件组成、系统软件组成以及数据传输与处理等方面进行详细分析,读者能够全面了解便携式计算机测控系统的构成和工作原理。
同时,通过深入探讨该系统的定义、应用领域以及未来发展趋势,读者可以更好地把握其在科技进步和产业发展中的重要作用。
希望本文能够为相关行业从业人员、科研人员以及研究者提供有益的参考和指导。
2. 便携式计算机测控系统的组成2.1 系统硬件组成便携式计算机测控系统通常由以下硬件组成:1) 主机/控制器:便携式计算机测控系统的核心部分,负责执行数据采集、传输和处理等任务。
主机/控制器通常由高性能的微处理器、嵌入式系统和相关接口模块构成。
2) 传感器/检测仪器:用于实时监测和检测不同物理量或参数变化的装置。
传感器可以是温度传感器、压力传感器、湿度传感器等。
通过与主机/控制器连接,传感器能够将实时数据传输给主机/控制器进行处理。
智能测控工程在智慧能源中的关键技术探讨

智能测控工程在智慧能源中的关键技术探讨随着全球能源需求的不断增长和环境问题的日益严峻,智慧能源的发展已成为当今世界能源领域的重要趋势。
智能测控工程作为实现智慧能源的关键技术之一,对于提高能源利用效率、保障能源供应安全、降低能源消耗和环境污染具有重要意义。
本文将对智能测控工程在智慧能源中的关键技术进行探讨。
一、智能传感器技术智能传感器是智能测控工程的基础,它能够实时感知能源系统中的各种参数,如温度、压力、流量、电量等。
与传统传感器相比,智能传感器具有更高的精度、更强的抗干扰能力和更灵活的接口。
在智慧能源中,智能传感器广泛应用于能源生产、传输、分配和消费的各个环节。
例如,在风力发电场中,智能传感器可以监测风速、风向、叶片转速等参数,为风机的优化控制提供数据支持;在智能电网中,智能传感器可以实时监测电力设备的运行状态,及时发现故障隐患,提高电网的可靠性。
为了满足智慧能源的需求,智能传感器技术不断发展。
一方面,传感器的微型化和集成化程度越来越高,使得传感器能够更加方便地安装在各种设备上,并且降低了成本;另一方面,传感器的智能化程度不断提高,能够实现自校准、自诊断和自补偿等功能,提高了传感器的可靠性和稳定性。
二、数据采集与传输技术在智慧能源系统中,大量的传感器产生了海量的数据,如何高效地采集和传输这些数据是智能测控工程面临的重要挑战。
数据采集技术需要具备高速、高精度和多通道的特点,能够同时采集不同类型的传感器数据。
目前,常用的数据采集技术包括基于微控制器的数据采集系统、基于现场可编程门阵列(FPGA)的数据采集系统和基于专用集成电路(ASIC)的数据采集系统等。
数据传输技术则需要保证数据的可靠性、实时性和安全性。
在智慧能源中,常用的数据传输技术包括有线传输技术(如以太网、RS485 等)和无线传输技术(如 WiFi、蓝牙、Zigbee、LoRa 等)。
其中,无线传输技术具有安装方便、灵活性高的优点,适用于一些难以布线的场景;而有线传输技术则具有传输速度快、稳定性高的优点,适用于对数据传输要求较高的场景。
iotdb原理-概述说明以及解释

iotdb原理-概述说明以及解释1.引言1.1 概述概述部分的内容通常用来介绍本文的主题和目的,以及对读者进行引导和激发兴趣。
下面是一个可能的概述部分的内容示例:概述随着物联网(Internet of Things,简称IoT)的迅猛发展,越来越多的设备和传感器连接到互联网,产生海量的数据。
这些数据对于各行各业来说具有重要的价值和挑战。
为了高效地存储、管理和分析这些海量数据,人们对于一种可靠、高效的数据库系统需求日益增加。
本文将对一种被广泛应用于物联网领域的数据库系统进行深入探讨,即IOTDB。
IOTDB是一种基于时序数据的开源数据库系统,专门设计用于高效地处理物联网设备生成的大规模时序数据。
它采用了一系列创新的技术和存储结构,旨在满足物联网中对于高性能、可靠性和扩展性的需求。
在本文中,我们将首先介绍IOTDB的基本原理,包括其核心组件和数据模型。
然后,我们将详细讨论IOTDB的存储结构,包括其采用的索引机制和压缩技术。
通过对这些内容的深入了解,读者将能够更好地理解IOTDB的设计理念,并掌握如何在实际应用中灵活运用。
此外,本文还将探讨IOTDB在物联网领域的应用前景以及对物联网发展所带来的影响。
通过本文的阅读,读者将能够全面了解IOTDB的原理和特点,为其在实践中的应用提供指导。
同时,我们也希望通过本文的探讨,能够激发更多的关于物联网数据管理和分析的思考,并为物联网的未来发展做出积极的贡献。
文章结构是指整篇文章的组织方式和章节分布。
在本篇文章中,我们将按照以下结构进行撰写:1. 引言1.1 概述1.2 文章结构1.3 目的2. 正文2.1 IOTDB的基本原理2.2 IOTDB的数据模型2.3 IOTDB的存储结构3. 结论3.1 总结3.2 IOTDB的应用前景3.3 对于物联网发展的影响在引言部分,我们将对全文进行简要介绍。
首先,在概述部分,我们将对IOTDB进行简要说明,包括其定义、用途和价值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Abstract : H undreds o f sensors need to be used to co lle ct the ana lo g signa ls and sto re the data at real ti m e in m assive data acqu isition syste m. A h ig h speed hard disk storage equ ipm ent and its sy stem based on FPGA w ere in tro duced . T he PIO transm ission fo r m w a s used to transm it the data based on the secto r f rom F IFO in th e speed o f 12 56M b / s . T he read w rite and P I O data transm ission pro cesse s o f hard disk reg ister using V erilogHDL language w ere ana ly zed through tak in g the statusm ach in e as the kerne. l T he hard d isk sto ring experi m ents on the object bo ard pro ve the fea sib ility o f the storage by the S igna lT ap real ti m e sto rage rate fo r th e co llected data can reach 0 8M b / s . K ey words : data sto rage ; hard disk ; PIO m ode ; FPGA; V erilogHDL language ; IDE interface ; SPI in terface 在以管道检测为代表 的海量数据采 集系统 中 , 传感器的数量和对传感器输出信号的采样频 率直接影响到检测结果的精确性和有效性. 随着 传感器数量的增加和采样频率的提高 , 对实时存 储速度提出了较高要求. IDE 接口硬盘具有容量 大、 可靠性高、 成本低、 存储速度快的优势 , 尤其适 用于多传感器、 高采样速率、 长时间运行的海量数 据采集系统的存储部分
[ 1- 2]
L o g ic A na ly zer . T he
引脚的特点来支持多片 AD, 满足海量数据采集在 采集通道数量上的要求
[ 3- 4]
, 因此, 需要在 FPGA
中使用硬件语言编程, 实现与硬盘 IDE 接口的通 信 . 本文设计的基于 FPGA 的硬盘控制器使用 Ver ilo g HDL 硬件语言编写, 支持 ATA /ATAP I 6标准中 的 PI O 传输模式 , 可作为 IP 核应用到以海量数据 采集系统为代表的多种具有存储环节的系统中.
. 通过对 IDE 硬盘控
制器的研究, 有利于开发出脱离通用 PC 机 , 专用 于特殊领域的硬盘数据存储系统. 海量数据采集系统常利用 FPGA 大量自定义
收稿日期 : 2008- 10 - 30. 基金项目 : 国家科技支撑计划项目 ( 2006BAK 02B01 05 ).
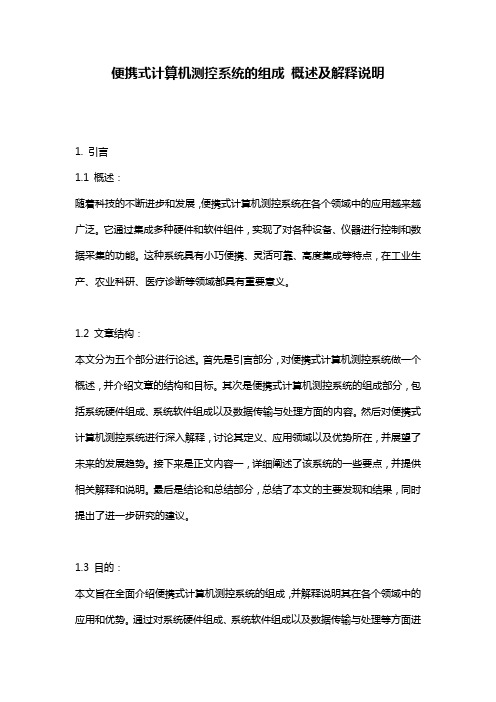
1 海量数据采集系统 FPGA 设计
写到 CS[ 1 0] 和 DA [ 2 0] 端口的 5 根地址线, 选 中相应设备寄存器. 同时保证 DIOW _ N 信号处于 t1 时间的无效状态. t1 时间段应包含 DIOW _N 有 效之前的几个状态跳转所消耗的时间 , 以便缩短 周期. 状态 3 D I OW _N 置为有效 , 将要写的数据 发送到数据端口 DD [ 15 0] , 并延时 tA 时间段后 进入状态 4 . 状态 4 检验 I ORDY 信号. 若信号有效 , 延时 t3 时间段后进入状态 5 ; 若信号无效, 则不跳转 . 状态 5 D I OW _N 置为无效并延时 . 若需要 清空 I NTRQ, 则延 时 400 ns; 若 不需 要清 空 IN TRQ, 则延时 t2 i时间段. t2 i时间段应包含 D I OW _N 无效之后的几个状态的跳转所消耗的时间. 将读 写完成信号发送给 P I O 控制模块. 状态 6 等待 DIOW _ N _P I O 无效 . 若 DIOW _ N _P I O 有效则不跳转 ; 若 DI OW _ N _P I O 无效, 则清空 读写完成信号, 跳转到状态 1 , 完成一次循环. 读状 态与上述过程类似. 硬盘的数据端口 DD[ 15 0] 为双向端口, 双向 端口一般用三态门来实现. 三态门的第三个状态就 [ 7] 是高阻 Z . 当双向端口不输出时 , 将三态门置 高阻, 避免信号因为两端同时输出而出错. 在程序Biblioteka 66沈阳 工业
大
学
学
报
第 31 卷
设计中, 要将双向端口分成输入 DD_I N [ 15 0] 和输 出 DD _ OUT [ 15 0] 两部分, 其 V erilogHDL 程序代码 如下 : assign DD_I N [ 15 0] = DD[ 15 0] ; assign DD[ 15 0] = D I OW _ N? 16 hzzzz: DD _OUT [ 15 0]; 其中 DD[ 15 0]、 DD_I N [ 15 0] 为 w ire 类型变量; DD _OUT [ 15 0]为 reg 类型变量. 这样, 对 DD [ 15 0] 双向端口的操作 就变为对 DD _ I N [ 15 0] 和 DD _OUT [ 15 0] 的操作, 解决了双向端口的读写 问题. 寄存器读写模块编写完成之后, 可以通过查 询硬盘各个寄存器上电后的初始值来验证寄存器 读写模块的编写是否正确 . 硬盘上电自检后, 各寄 存器的值为 : 状态寄存器 : 扇区数寄存器: 扇区号寄存器: 柱面数低位寄存器: 柱面数高位寄存器: 驱动器 /磁头寄存器: 2 2 PI O 控制模块设计 50h 01h 01h 00h 00h 00h
杨理践, 于潇宇 , 高松巍
( 沈阳工业大学 信息科学与工程学院 , 沈阳 110870)
摘
要 : 为了在海量数据采集系统中能够使用几百路传感器对模拟信号进行高速 采集并将数据实
时存储 , 设计了一种在 FPGA 内部实现硬盘控制的方法 . 通过 P I O 传输模式进行以扇区为单位的数 据传输 , 将异步 F I FO 内的数据存入硬盘 , 平均写入速度达到 12 56M b /s, 以状态 机为核心 , 分析了 使用 V erilgo HDL 语言实 现硬盘 寄存器 读写和 P IO 数 据传输的 过程 . 在目 标板上 进行硬 盘存储实 验 , 通过 Signa l T ap 关 键 Log ic Ana lyzer逻辑 分析 仪对 硬盘 控制 器的 功能 进行 验证 , 采 集数 据可 达到 0 8M b / s的实时存储 . 词 : 数据存储 ; 硬盘 ; P IO 模式 ; 现 场可编 程门阵列 ; V er ilog HDL 语言 ; I DE 接口 ; 串行 外设接口 中图分类号 : TP 274 文献标志码 : A
Hard disk controller in massive data acquisition system
YANG L i jian, YU X iao yu , GAO Song w ei
( Scho o l of Info r m ation Sc ience and Eng ineer ing , Sheny ang U n iv ersity o f T echno lo gy, Shenyang 110870, Ch ina)
, 等待 P I O 控制 模块读 取.
图 1 海量数据采集系统组成框图 Fig 1 Con figuration of m assive data acquisit ion syste m
状态 2 将 P IO 控制模块输出的寄存器地址
2 硬盘控制器设计
硬盘控制器按照 ATA /ATAP I 6 协议 进行设 计, 由 P I O 控制 模块和寄存器读写模块组成 , 从 F IFO 内读取数据, 完成存储功能.
2 1 寄存器读写模块设计 在 P IO 4 模式下 , 寄存器的 读写是最基本的 硬盘操作 . 状态查询、 写命令、 数据的读取和写入 等几个最基本操作几乎都可以分解成寄存器的读 写和 I NTRQ 等几个单独引脚的操作 . 下文涉及的 PI O 数据读写时序与寄存器读写时序相同 , 寄存 器读写模块通过 VerilogHDL 语言编写的 状态机 来实现 . 时序中的各个时间段均是 5 ns 的倍数, 建议使用 100MH z或 200MH z的输入时钟, 使各 个时间段的延时接近要求值, 便于缩短读写周期, 达到提高数据传输速度的目的 . 寄存器读写模块 的状态机包括 6 个状态: 状态 1 变量初始化, 检测 P I O 控制模块的 DIOR_ N _P I O和 DI OW _N _P I O 信号 . 若 D I OR _N _ PI O 有效, 跳转到读时序的状态机 ; 若 DIOW _N _ PI O 有效, 跳转到写时序的状态机 . 把读写时序分 开 , 层次清晰 , 有利于时序的调试. 当跳转到写时 序时, 进入状态 2 .
[ 5- 6]
P IO 控制模块按照 ATA /ATAP I 6 标准设计, 采用 P IO 4 的传输模式, 先将 写扇区的命令通 过寄存 器读写模块发送到硬盘, 然后依照 P IO data out协 议不断将异步 F IFO 内的数据写到寄存器读写模 块的数据端口. 寄存器读写模块 依照 ATA /ATA P I 6 标准中的 P I O data transfer时序编写 , 将 P I O 控制模块发来的数据写到硬盘, 并将硬盘内部需 要读取的相关寄存器的值发送到 P I O 控制模块. 海量数据采集系统设计框图如图 1所示.