双CPU数据处理系统设计
基于CAN通讯的双CPU六通道汽车ABS系统设计

c t y t e CAN o t The t s fma n mir p o aeb h p r. a k o i c o r — c s o o ABS yse es r f s t m d ae wih he i a o e ld t t sgn l f wh e pe d a d e c t s t e c nt o l o ih o e ls e n xe u e h o r la g rt m f
2个 C U 之 间的相 互 协 同工作 问题 涉及 甚 少 。基 P
于 以上 原 因, 计 了 一种 基 于 C 设 AN 通 讯 消 息 应 答 模式 的双 C U 协 同通 讯 的 AB P S系统 。2个 C U P 之 间实时通 过 C AN 口交 换 信 息 , 时进 行 消息 应 同 答 的方 式 以确保 双 C U 可靠 协 同的工作 。C P AN 总 线是 2 O世纪 8 O年代初 德 国 B CH 公司 为解决 现 OS 代汽 车 中众 多控制单 元 、 试仪 器 之 间 的实 时数 据 测 交换 而开发 的一种 串行通讯协 议 。由于采用 了许 多
文 章 编 号 :O 1 2 7 2 1 ) 1 0 6 0 1 O —2 5 (O 0 l —0 6 — 3
Ab t a t The a r e i e t e i ha ne src : p pe d sgn d h sx c n l
A BS s t m ih t ou eCPU h ti o m u — ys e w t hed bl t a s c m ni
A BS o t o pr g e s The t s o sa CPU c n r l o rs. ak f lve
新技术及 独特 的设计 , AN 总线的数 据通信 具有 突 C
双CPU系统设计及其在交流调速中的应用
收 藕 日 期 :0 1 0 — O 2 0 — 1 l g
作 者 简 介 : 汉 湘 (9 7 ) 男 , 士 . 授 程 15一 . 博 教
身 集 成 有 A D、 / P / D A( WM 输 出 ) 以 及 串 并 行 I0 端 口等 功能 , 适 应 较 为 复 杂 的 工 业 现 场 控 、 / 能
制 . 另 一个 角 度 来 看 , 有 较 大 量 的 计 算 时 , S 从 当 D P芯 片 应 当 为 首 选 , 此 , 个 集 成 度 高 的嵌 因 一
器 件 . 两 个 C U 间 的 相 互 通 信 上 , 统 采 用 了双 口 RA l I T 1 2 , 过 它 可 以 顺 利 地 实 现 在 P 系 b (D 7 3 ) 通
两 个 C U之间 的数据传输 . P 系 统 在 资 源 分 配 和 软 件 编 程 中 只要 利 用 高 集 成 度 嵌 入 式 处 理 器 8 C16 0 9 KC 的强 大 外 围
维普资讯
第2 3卷 第 4期
场合 .
程 汉 湘 等 : C U 系统 设 计及 其 在 交 流 调 速 中 的应 用 双 P
3 3
在 该 系 统 中值 得 指 出 的是 ,虽 然 由 于 C U 的 数 据 地 址 总 线 可 以 直 接 与 P P D 连 接 , 在 到 双 口 RAM 和 输 出 至 键 S 但
求 . 多 C U 组 成 的 系 统 中 , 个 处 理 器 明 确 分 工 , 时 又 密 切 联 系 , 大 地 提 高 了 系 统 的 控 在 P 各 同 大
铁电存储器FM1808
铁电存储器FM1808铁电存储器是Ramtron公司近年来推出的一款掉电不挥发的存储器,它结合了高性能和低功耗的操作,能在没有电源的情况下保存数据。
FRAM克服了EEPROM 和Flash写入时间长、擦写次数少的特点。
其价格又比相同容量的不挥发锂电SRAM低很多,已在工控仪表、办公复印机、高档服务器等系统中应用,具有广阔的应用前景。
本文介绍一种并行接口铁电存储器FM1808的特点。
同时根据某军用装备中数字信号处理系统对该存储器的应用实例,给出了一种双CPU模拟读写时序控制铁电的设计方案。
实现了软件根据数据处理速度需要控制铁电存储器的系统设计。
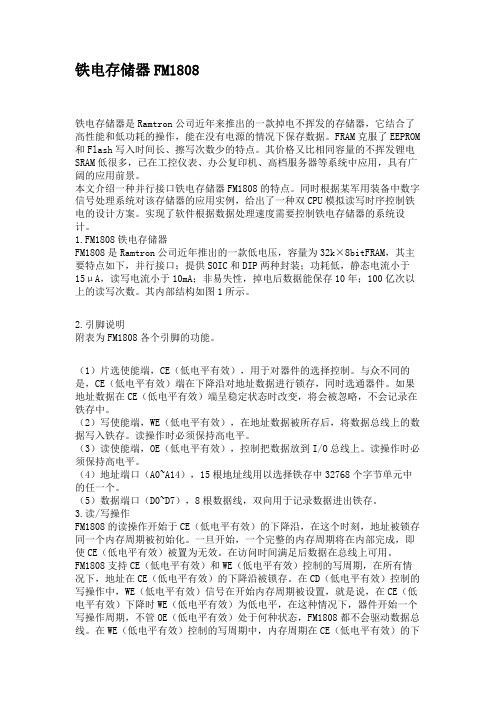
1.FM1808铁电存储器FM1808是Ramtron公司近年推出的一款低电压,容量为32k×8bitFRAM,其主要特点如下,并行接口;提供SOIC和DIP两种封装;功耗低,静态电流小于15μA,读写电流小于10mA;非易失性,掉电后数据能保存10年;100亿次以上的读写次数。
其内部结构如图1所示。
2.引脚说明附表为FM1808各个引脚的功能。
(1)片选使能端,CE(低电平有效),用于对器件的选择控制。
与众不同的是,CE(低电平有效)端在下降沿对地址数据进行锁存,同时选通器件。
如果地址数据在CE(低电平有效)端呈稳定状态时改变,将会被忽略,不会记录在铁存中。
(2)写使能端,WE(低电平有效),在地址数据被所存后,将数据总线上的数据写入铁存。
读操作时必须保持高电平。
(3)读使能端,OE(低电平有效),控制把数据放到I/O总线上。
读操作时必须保持高电平。
(4)地址端口(A0~A14),15根地址线用以选择铁存中32768个字节单元中的任一个。
(5)数据端口(D0~D7),8根数据线,双向用于记录数据进出铁存。
3.读/写操作FM1808的读操作开始于CE(低电平有效)的下降沿,在这个时刻,地址被锁存同一个内存周期被初始化。
一旦开始,一个完整的内存周期将在内部完成,即使CE(低电平有效)被置为无效。
双CPU(单片机)控制系统

摘要:针对重要系统可靠性要求,特设计了一种双CPU控制系统。
在该系统中,两个CPU彼此独立运行,可以自动或手动实现双机的主辅切换,只有主CPU能正常读写外部RAM数据和控制输出。
关键词双CPU 切换监控控制单片微机具有小巧灵活、易扩展成为功能强大的控制系统。
目前,一些监控终端以及许多独立的控制系统(如:发电机的微机励磁装置)多以单片微机为核心构成。
但由于诸如工作环境恶劣、电磁干扰等原因,即使使用按工业测控环境要求设计的单片微机也难以保证控制系统能长期可靠的运行,从而导致控制系统瘫痪。
这样,如何提高控制系统的可靠性,保证测控系统能正确稳定的运行就尤为重要。
显然,采用双CPU冗余设计是非常有效的一种解决办法。
由于单片微机的功能强大,价格低廉,为设计双机冗余系统提供了很好的条件。
为此,我们设计了一种由两片单片微机组成的双机容错系统,以比较简单和与传统的多CPU系统完全不同思路的设计方法实现了双机的互为备用及相互切换。
在该双机冗余系统设计中,其关键问题是双机系统的重构策略和双机系统的仲裁逻辑切换。
1 传统的多CPU系统设计方法传统的多CPU系统的常用设计方法有三种:①利用双口RAM实现CPU之间的通信。
双口RAM是一种高速的并行传输芯片,具有两套I/O口和竞争裁决电路,可以同时联接两个CPU,这样通过双口RAM可以实现多CPU之间通信。
②利用共享存的方法实现CPU之间的通信。
这种方法与上一种方法类似,所不同的是,上一种方法是利用双口RAM的竞争裁决电路实现对RAM的访问,而这种方法是利用不同的时序实现存共享的。
③利用总线方法实现CPU之间的通信。
通过接口芯片或CPU本身具备的SPI、I2C以及SMBus等接口实现CPU之间的通信。
2 该双CPU系统的结构和工作原理该双CPU控制系统与传统的多CPU系统的设计方法完全不同,它由两片Atmel公司生产的AT89C51 CPU构成,双机互为备用,彼此独立并行运行,硬逻辑切换。
基于双CPU实时图像监控系统的设计

一囤
一
巨
控系统的技术水平直接反映
。
了不同阶段电子与通讯的技术状 况 上世纪 9 年代末,随着多媒体技术、视频压缩编码技术 0
三_ _ J
= =
L—_ _ ‘ J 一
A
一回
一
圈 一 厥 丽百 ]
字 图像监控系统 巾,嵌入式监控系统主要 由嵌入式处理器 、 以太 网接 口控制器等相关支撑硬件 及嵌入式操作系统组成 。 1 设计方案 本系统采用 T 公司的 T S 2V 5 7 为处 器,此芯片 I M 3 0 C4 1
a pli d n an si a o p e i m y tu ti ns. T d M S esi n pr os b ed g op es as on he t dou le b CP r U eal —ti e  ̄ m mag m e oni ori g mb dde t n e e d
冯新刚 谭卢敏
F g en Xi a T L mi ng ng an u n
_ 0 C
实 时 图 像 监 控
系
( 工 江西 大学应用科学 学院, 江西 赣州 31 0 40 ) 0 ( pidSineIsiue inx nvriyo cec n ehooy inx Gnhu 400 A le cec nttt,JagiUiest fSineadTcnlg,Jagi azo 310) p
中 图分 类 号 :T 3 30 P 9 .2 文 献标 识 码 :A 文 章编 号 : 1 7 — 7 2 (0 77 0 9 0 1 4 9 一 2 0 )—0 4 — 2 6
Ab ta t h m g o i o i g b i s d r c — i w n src :T e i a e m n t r n y t i e t v e i g,c n e i n o v n e t,t e n o m t o o t n n i h s i i e y h if r a i n c n e t e r c e S w d l
基于双CPU的电力保护系统设计研究

1 1 2DS . . P与8 C5 数 据 通 信 9 2
由 于 本 系 统 采 用 了DS P与 单 片 机 双
提 高 的 瓶 颈 , 于 要 求 高 速 采 样 的 应 用 , 发挥 了双 C 对 PU结 构 并 行 工 作 、 工合 作 的 C 结 构 , 分 PU 因此 他 们 之 间 的 数 据 交 换 接 口 系统 显 得 力不 从 心 ; 是 选 择 算 法 时 必 须 优 点以 及D P 片运 算 速 度快 、 二 S芯 擅长 数 字信 成 为 影 响 整个 系统 数 据 处 理 能 力 的 重 要 环 放 弃 虽 有 较 满 意 的 性 能 , 计 算 量 大 的 方 号 处 理 的优 点 , 满 足 继 电保 护 速 动 性 、 但 既 选 节 。 系统 采 用 了双 口RAM 实现 高 速 数 据 本 案 。 此 , 用 多 CP 因 采 U型 的 微 机 保 护 硬 件 择 性 和 可 靠性 的 要 求 , 时 又 实 现 了 实时 通信 , 种 通 信 方 式 数 据传 输 的 速 率 很 高 , 同 这 结构 是必 然的 。 测 量 的 高精 度 。 护 系 统 的 总体 框 图如 图 1 而 且 抗 干 扰 性 能 较 好 。 保
2 0 Hz AD 8 6 内部 集成6×1 bt 据缓 5 k , S 34 6i 数 冲 寄 存 器 , 过 向A 、 、 写 控 制 字 可 选 通 A.A, 择直 接 寻 址模 式 、 环 读 数 、 I O三种 方 式 循 FF
基于双DSP和FPGA的导航处理系统设计

基于双DSP和FPGA的导航处理系统设计张良庆;宋开臣【摘要】机电技术的发展为惯性测量系统的大量应用奠定了基础.针对深海导航应用场合,为了提高深海惯性导航的精度和实时性,设计了基于双数字信号处理器(DSP)和可编程逻辑门阵列(FPGA)的捷联惯性导航计算机,成功构建了低成本、小型化的捷联惯性导航系统(SINS).重点描述了双DSP和FPGA导航计算机的硬件设计思路.扼要介绍了系统软件的框架结构.与目前大多数的惯性导航系统相比,该系统体积小、重量轻、功耗低,适用于运算复杂的嵌入式惯性导航系统.实验室车载实验结果证明了上述设计的正确性和可行性.【期刊名称】《机电工程》【年(卷),期】2010(027)005【总页数】4页(P38-40,55)【关键词】捷联惯性导航系统;导航计算机;信号完整性仿真;数字信号处理器;可编程逻辑门阵列【作者】张良庆;宋开臣【作者单位】浙江大学,流体传动及控制国家重点实验室,浙江,杭州,310027;浙江大学,生物医学工程与仪器科学学院,浙江,杭州,310027【正文语种】中文【中图分类】TP212.9;U666.1捷联惯性导航系统是一种自主式导航基准系统,它成本低廉、结构简单、可靠性好,在军事领域作用明显[1]。
现在,许多应用场合都要求系统小型化,如:汽车调平系统、空中机器人导航系统、深海导航系统等。
如果捷联惯性导航系统仍然使用个人PC作为导航计算机,无疑会制约其在小型领域内的推广使用。
针对这种现状,结合捷联惯性导航系统特点,本研究设计了基于双DSP(TMS320C6727)和FPGA的深海导航专用计算机,进行捷联惯性导航系统软件程序的编写,成功地实现了深海捷联惯性导航系统,并取得了很好的效果,对导航系统在深海惯性导航领域的推广应用具有实际意义。
深海捷联惯导系统的组成(如图1所示):传感器为六自由度惯性组件(IMU)和DS18B20温度传感器;系统接口管理是FPGA;系统计算核心器件是双DSP导航计算机;上位机是控制计算机。
浅析CPU两大架构ARM和X86区别及拓展windowsx86与x64的区别

浅析CPU两⼤架构ARM和X86区别及拓展windowsx86与x64的区别 由于在 linux 安装nodejs环境时遇到⼀个不可执⾏⽂件的问题,涉及到了ARM和x64⽂件,所以查了点资料初步了解了⼀下cpu两⼤架构:ARM与X86的区别。
⼀、CPU是什么 中央处理单元(CPU)主要由运算器、控制器、寄存器三部分组成,从字⾯意思看运算器就是起着运算的作⽤,控制器就是负责发出CPU每条指令所需要的信息,寄存器就是保存运算或者指令的⼀些临时⽂件,这样可以保证更⾼的速度。
CPU有着处理指令、执⾏操作、控制时间、处理数据四⼤作⽤,打个⽐喻来说,CPU就像我们的⼤脑,帮我们完成各种各样的⽣理活动。
因此如果没有CPU,那么电脑就是⼀堆废物,⽆法⼯作。
移动设备其实很复杂,这些CPU需要执⾏数以百万计的指⽰,才能使它向我们期待的⽅向运⾏,⽽CPU的速度和功率效率是⾄关重要的。
速度影响⽤户体验,⽽效率影响电池寿命。
最完美的移动设备是⾼性能和低功耗相结合。
⼆、要了解X86和ARM,就得先了解复杂指令集(CISC)和精简指令集(RISC) 从CPU发明到现在,有⾮常多种架构,从我们熟悉的X86,ARM,到不太熟悉的MIPS,IA64,它们之间的差距都⾮常⼤。
但是如果从最基本的逻辑⾓度来分类的话,它们可以被分为两⼤类,即所谓的“复杂指令集”与“精简指令集”系统,也就是经常看到的“CISC”与“RISC”。
Intel和ARM处理器的第⼀个区别是,前者使⽤复杂指令集(CISC),⽽后者使⽤精简指令集(RISC)。
属于这两种类中的各种架构之间最⼤的区别,在于它们的设计者考虑问题⽅式的不同。
我们可以继续举个例⼦,⽐如说我们要命令⼀个⼈吃饭,那么我们应该怎么命令呢?我们可以直接对他下达“吃饭”的命令,也可以命令他“先拿勺⼦,然后舀起⼀勺饭,然后张嘴,然后送到嘴⾥,最后咽下去”。
从这⾥可以看到,对于命令别⼈做事这样⼀件事情,不同的⼈有不同的理解,有⼈认为,如果我⾸先给接受命令的⼈以⾜够的训练,让他掌握各种复杂技能(即在硬件中实现对应的复杂功能),那么以后就可以⽤⾮常简单的命令让他去做很复杂的事情——⽐如只要说⼀句“吃饭”,他就会吃饭。
PLC的双CPU冗余控制实现

PLC的双CPU冗余控制实现>摘要:本文介绍了在熔盐炉自动系统中,采用Allen-BradleyControlLogix双CPU的PLC控制器,以软件方式实现CPU冗余控制。
这是一种花钱少、效果好的提高系统可靠性的有效手段。
关键词:CPU冗余,ControlLogix,编程PLC是现代工业的三大支柱之一,是可靠性高、应用非常广泛的工业控制产品。
在中大型模块化的PLC产品中,CPU模块(中央处理器)是PLC 的中心。
一些重大的工业生产线往往要求连续运行不能停顿,而可靠性再高的PLC也不能保证故障为零,因此,双CPU的冗余控制是一种满足连续生产要求、提高系统可用性的有效手段。
下面以熔盐炉自控系统为实例详述双CPU冗余控制的实现方法。
一、熔盐炉自动系统综述熔盐炉自控系统是一水硬铝管道化溶出生产线上的重要环节,控制熔盐的加热和循环,用熔盐的热量去循环加热铝矿石浆。
铝矿石浆的加热至关重要,影响最终产品一氧化铝的质量和产量,因此,熔盐的温度控制和循环控制非常重要。
由于熔盐炉系统在管道化工程中的重要性,同时考虑到熔盐是一种活跃的化学品,在不同的温度下有不同的形态,低温下凝固,高温下不稳定会发生化学反应,从而腐蚀管壁甚至于爆炸,所以安全、可靠、操作简便和自动化管理是系统设计的关键,因此考虑用一套双CPU冗余的PLC、两套工控机、高质量的传感器、变送器和执行机构来控制两台1200万大卡的熔盐炉、一台盐泵、一组盐阀、一个熔盐槽和其他相关设备,实现熔盐的加热和循环过程自动化、计算机操作、监控和管理的自动化控制。
该系统如图1所示。
骐工挣机It H拄机群用把竹屏熔林仲乱装拄阚热槽重油系统图1熔盐炉自幼系统图控制器PLC、工控机(包括显示器)、通讯网络和电源及关键测试点等系统中的重要部件均采用冗余结构,两套工控机和大屏幕显示器组成的两套监控操作管理台并行运行;两条冗余的ControlNet高速通讯网络同时传送数据;两套直流电源同时向控制器PLC、变送器和开关量输入模块供电,关键测试点同时设置两个传感器测试数据。
基于双CPU的实时光电图像识别系统

采用 TI 司 的 T C 5 0芯 片 来进 行 高 速 A D采 公 L 51 / 样 。T 5 1 I 50为 5 V 电 源 、 C 8位 、 0 Mss的 高 速 并 行 2 p
发 出的 采 样 完 成 信 号 。
C 4 是 T 公 司 推 出 C O O系 列 D P 中 的 最 新 成 6X I 6O S
员, 采用 了 Ve c 12结构 , 主要在 内部 c U 功能单 li . o TI 其 P
元 、 用 寄存 器 组 及 其 数 据 通 路 等 方 面 进 行 了 较 大 的 改 通 进 。C 4 6 x具 有 8 相 互 独 的 功 能 单 元 , 中 包 含 6 个 其 个
” 一 ’
统相比, 系统 实时性和精度更 高, 该 并可 实现智能化和 网络化。
关键词 图像 识 别 光 电 图像 处理 TMS 2 C 4 6 3o 6 1 ¥ C 4 o 自动 识 别模 块 3 2 4
等处理过程 。然后 , S D P将处理后的 目标 图像和参考图像
引 言
构成 的联合输入图像实时输 出到液 晶电视上 , 联合图像经 过激光光束的照射后 , 经傅 里 叶变换透镜 3 , 后 形成联合 图像傅里叶频谱 。该频谱经低通滤波后 , 得到所需 的中心 频谱_ 并 通 过 摄 像 头 2接 收 进 入 AR 3, 3 _ M9处 理 器 ¥ C 4 o 来 完成 图像频谱 的振 幅调制及傅里叶逆变换 的 3 24 , 处理 , 得到所 需互 相关 结 果。由于 真 目标 互 相关信 号较 强 , 目标的互相关信号很 弱 。 以通 过设定 阈值来判断 假 可 真假 目标 图像 , 即当相关结果大于 阈值时 , 识为真 目标 , 小 于 阈值时 , 识为假 目标 。当判 为假 目标时 , 通过 通信接 口
《计算机组成原理》6-CPU设计

6.1.2 CPU组成——CPU内部数据通路
CPU 运算器
寄存器
中断
系统
CU
时序系统
数
地
控
据
址
制
线
线
线
在确定一台计算机的总体结构的时候,主要考 虑这样以下问题:
设置哪些部件; 各部件间如何传递信息(即数据通路); 主机与外围设备之间如何实现信息传送; 如何形成微操作命令序列。 前三个问题于机器指令系统设计有密切的关系; 后一个问题涉及到设计策略,其中,数据通路结构 是总体结构设计的核心。
但这种寄存器结构使所需单元器件与连接线增多, 不利于集成度的提高。
6.1.2 CPU组成——CPU典型内部数据通路
M
移位器
D R
ALU
RN
...
锁存器
锁存器
R2
M A
R1
R
IR
PC
状
CU
…
态 信
时钟
…
息
控制信号
3)单组内总线、集成寄存器结构。为了提高寄存 器的集成度,常将寄存器组制作成为小型半导体存储 器结构,一个存储单元就相当于一个寄存器。
6.1.2 CPU组成——CPU典型内部数据通路
2)单组内总线、分立寄存器结构。它的特点是 寄存器分别独立设置,采用一组单向的数据总线, 以ALU为内部数据传送通路的中枢。由于各寄存器在 物理上彼此分立,它们的输出端均与ALU输入端的多 路选择器相连(MAR除外因为它的特殊作用使得它 只能接收地址,传送给主存),多路选择器可以采 用与或逻辑,在同一时刻最多可以选择两路输入, 送入ALU进行相应运算处理。寄存器的数据输入来自 CPU内部总线,由于寄存器彼此分离,只要发出相 应的同步打入脉冲,即可使内总线同时将数据打入 一个或多个寄存器。
基于双CPU控制的矿用高压配电装置测控系统的设计

据 不 变 ,当监控 C U在 2 ms P 0 内查 询巡 检 数据 不
基 于对 矿 井 高 压 电网各 种 保 护 原 理 的分 析 , 根 据 电 网保护 的 功能 要求 和 技术 指标 对 测控 系 统 的硬件 电路进 行 了总 体设 计 ,其 硬件 原 理框 图如
的数据显 示 , 同时发送 给上 位机 。 3非 易失性 存储 器 。 ) 主要用 来存 储需要 掉 电保
护 的数据 。
随着 采煤 自动化 技术 的发展 ,对矿 井供 电 的 连续 性 、 可靠 性 和安 全性 提 出 了越来 越 高 的要求 , 因此 对 矿井 高压 配 电装 置测 控 系统 的研 究 具有 重 要 的理论 和 应用 价值 。本 文在 广泛 收 集矿 井 电 网 微 机保 护 资料 、借 鉴 电力 系统 继 电保 护成 熟 经验 的基础 上 ,将微 电子技 术 和微 电脑 技 术 应用 到保
2 1双 口 R M。采用 双 口 R M 实 现两个 C U A A P
之 间数据 共享 , 两个 C U之 间工作 互不 影 响。 P 当保 护 动作 时 ,通过 双 口通 信 电路 将 相应 的保 护 动作 信 息传 给监 控 C U系统 , 控 C U系统 将接 收 到 P 监 P
视线及接地线之间断路或短路故障的保护。
C U 系统设计模式 , P 大大增强了软件的冗余度和系统的可靠性 , 高了保护、 提 显示和通讯的
处理速度。实践表明: 该高压配电装置测控 系统性能稳定, 运行可靠, 具有广阔的应用前景。
关键词 : 高压 配 电装 置 ; CP 选择 出褊电保护 ; 相环 同步 采样 双 U; 锁
基于以太网的双CPU点焊控制系统设计

构 的使 用 和装 配 。
4总结
经过计算,耳片部件的最大应力都出现在耳片孔外缘 以及助 推级耳片的耳片根部下缘, 如图 4图 5 、 所示。 通过对耳片接头的初步尺寸设计与分析,耳片结构可以应
用在主接头处 , 结构安全余度较大, 结构利用率较高。 耳片接头在 能力强 , 结构简洁 , 重量轻。 在耳 片接头方案基础 E 做一些适应工
w li p oes dteq ai o u i t wt e o p tr C a xh g a yuigo to edn rcs a u t t cmm nc e i t m u . M m yec a edt b s w g n h l yo a h h c eS n a nf d a- otR M m mo . h p t edn o t l otced s , g  ̄h o fe bc ot l s u lp r A e r I teso w ligc nr fwI ei aa o tm f r e d ak cnr yn os r n g l oi
ct n i i n o t l i igT i ds no o w li o t l rhsad a s u tr o C O e a ost n ad cnr m n.h ei s t e n c nr l a ul t cuef S M.n i m g ot s g fp d g oe r
杨 威 李冬 清 (长春 工程学 院 , 长春 10 1 ) (哈尔滨 工业大学 , 302 z 哈尔滨 10 0 ) 5 0 1
A u CPU s o l igc n r l e i nb s done h n t d a p t we dn o t l d sg a e t er e o er
基于TMS570的SIL4级列控系统安全平台设计
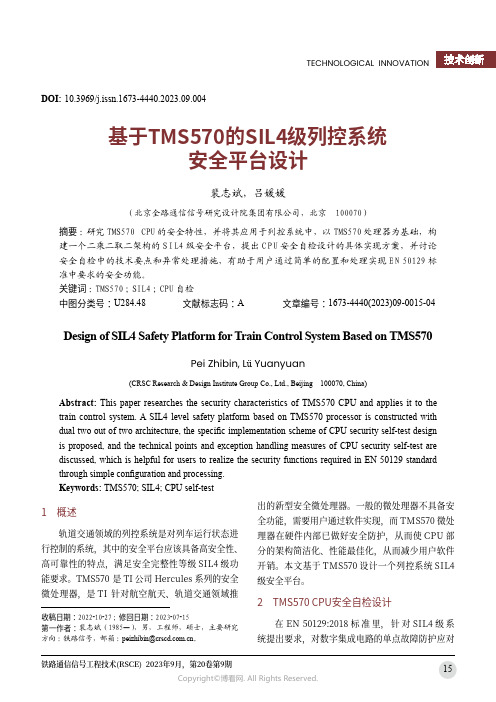
基于TMS570的SIL4级列控系统安全平台设计裴志斌,吕媛媛(北京全路通信信号研究设计院集团有限公司,北京 100070)摘要:研究TMS570 CPU 的安全特性,并将其应用于列控系统中,以TMS570处理器为基础,构建一个二乘二取二架构的S I L4级安全平台,提出C P U 安全自检设计的具体实现方案,并讨论安全自检中的技术要点和异常处理措施,有助于用户通过简单的配置和处理实现E N 50129标准中要求的安全功能。
关键词:TMS570;SIL4;CPU 自检中图分类号:U284.48 文献标志码:A 文章编号:1673-4440(2023)09-0015-04Design of SIL4 Safety Platform for Train Control System Based on TMS570Pei Zhibin, L ü Yuanyuan(CRSC Research & Design Institute Group Co., Ltd., Beijing 100070, China)Abstract: This paper researches the security characteristics of TMS570 CPU and applies it to the train control system. A SIL4 level safety platform based on TMS570 processor is constructed with dual two out of two architecture, the specific implementation scheme of CPU security self-test design is proposed, and the technical points and exception handling measures of CPU security self-test are discussed, which is helpful for users to realize the security functions required in EN 50129 standard through simple configuration and processing.Keywords: TMS570; SIL4; CPU self-testDOI: 10.3969/j.issn.1673-4440.2023.09.004收稿日期:2022-10-27;修回日期:2023-07-15第一作者:裴志斌(1985—),男,工程师,硕士,主要研究方向:铁路信号,邮箱:*******************.cn 。
基于双CPU结构的数据监控系统设计

了双 C U 结 构 ,并 结 合 了 双 口 R M 和 非 易 失 P A
RAM 。
掉 电非 易 失存储器
高速 U A 0 1 D 86
光隔H A) /转换 I
图 I 系统 结构 图
Fi 1 S r cu e o y tm g. tu tr fs se
定性 。 当前此类 系 统 多 由上 位 机 ( C或 工 控 机 ) P 、
善h
键 盘 显示 人机交 互设 备
DSl 4 64 CY7 0 C0 7
匦
下 位 机 ( 片 机 、D P等 ) 单 S 、模 拟 数 据 采 集 设 备 、 数模 转换 器件 、各类 存储 器 构成 ,应用 广 泛n 。笔 ]
C N总线驱动器 仁 C N总线 l I上位机 A A ㈢
限制 故 障扩大 、保证 系统 正 常工作 的重 要措 施 。人
机交互设备可以在第一时间为用户提供各种数据信
息和故 障消息 。要 害部 门对 电源供 给 的稳定 性 要求
很 高 ,所 以数据 监控 系统 必须 有很 好 的实 时性 和稳
维普资讯
20 0 6年 4月
中国工程 科 学
E gn ei g S in e n ie rn ce c
Ap .2 0 r 06 Vo . 1 8 No. 4
第 8 卷第 4期
专 舞| ≮ 慧 ; l l 撬
_ 譬 4 搿 誊
2. 1
I C5 W D 9 5
该 芯 片硬 件核 心 采用 了 It 0 5 单 片机 硬件 n l C1 e8
2 硬 件 电路
系统 结构 图如 图 1 示 。它 由 2片 C U外 加双 所 P
基于双口RAM的双CPU控制系统设计

基于双口RAM的双CPU控制系统设计石俊杰;陈军华【摘要】从对信息的高速处理的要求出发,结合较为流行的双口RAM,介绍了设计双CPU控制系统的方法及要点,并给出了关键部分的典型实现.【期刊名称】《通信电源技术》【年(卷),期】2014(031)001【总页数】3页(P59-60,63)【关键词】双CPU;双口RAM;共享;访问【作者】石俊杰;陈军华【作者单位】63981部队,湖北武汉430030;63981部队,湖北武汉430030【正文语种】中文【中图分类】TP2730 引言在现代智能控制系统中,随着信息量的增加和实时性要求的提高,经常需要对信息或数据进行高速采集和处理,这就要求在设计控制系统时充分关注它的信息处理能力,否则极易造成数据处理中的“瓶颈”现象,从而达不到设计要求。
目前,除了采用性能更高的控制芯片外,还可以采用双CPU结构,利用高速双口RA M实现双CPU间的信息处理。
这样,不管是并行处理网络中的数据共享,还是在流水处理中的数据传送,都能保证数据通路的畅通;而且,随着低端微处理价格的不断下降,采用双CPU结构有时能避免采用高性能CPU上的高成本,获取更高的经济效益。
1 设计双CPU系统的几个要点双CPU控制系统比单CPU控制系统更为复杂,本文着重从几个值得注意的要点予以探讨:(1)确保双CPU工作的协同和可靠在双CPU控制系统中,两个CPU应是同一系统中的两个不同的处理单元,它们可以处理不同的事务或数据,但对控制系统外部接口而言,它们可以看作是一个整体。
因此,一旦其中一个CPU出现故障,另一个CPU会有反应,所以在硬件和软件设计时有相应的故障冗余处理。
(2)合理设计交叉事务的实时处理软硬件图1 交叉事务的实时处理框图如图1所示,在有些控制系统中,有时需要通过事务处理接口A(B)实时访问数据采集接口B(A)或事务处理接口B(A),这时,单纯依赖数据共享是不够的,必须考虑双CPU间的直接指令传送。
基于单片机的电力系统故障录波设计.

摘要摘要电力系统故障录波装置是常年投入运行监视运行状况的一种自动记录装置。
故障录波装置可以准确地反映故障类型、相别、故障电流、电压的数值以及断路器的跳合闸时间和重合是否成功等情况, 可以正确分析和确定事故的原因, 研究有效的防止措施, 从而减少以至避免再发生类似事故, 对保证电力系统安全运行的作用极其重要。
本论文首先介绍了故障录波器的研究背景与意义,分析了国内外故障录波器的发展现状。
就故障录波器的基本要求和主要技术指标提出了FPGA+C8051F120的双CPU系统方案,并且针对故障数据存储容量的瓶颈问题提出了基于USB接口的大容量存储方案。
其次,论文完成了基本的硬件电路设计和软件算法设计。
本论文主要研究基于FPGA+C8051F120的双CPU系统方案的软件设计,系统统地阐述了数据处理系统的实现,故障录波器的主要启动判断、数据采集和数据存储,并用快速傅里叶算法(FFT)对交流谐波进行分析。
最后,对其故障录波器的特点和应用前景做了展望。
关键词:故障录波器;启动判断;FFT;高速数据采集IAbstractAbstractElectric power system fault wave record device is perennial investment operation monitoring the operation condition of a kind of automatic recording device. Trouble wave record device can be accurately reflect the fault type, phase don't, fault current, voltage of the numerical value of the circuit breaker and jump off time and coincide success and so on, can correct analysis and determine the cause of the accident, the effective prevention measures, so as to reduce and avoid again occurrence similar accident, to ensure the safe operation of the power system is the important role.Firstly,this paper introduces the research background and significance of the fault recorder,and analyzes me developing status of fault recorder at home and abroad.It puts forward me measure of double CPU(FPGA and C8051F120) in view of the basic requirememts and the main technical indicator of the fault recorder moreover the lager storage scheme based on USB is proposed in View of the breakdown data storage capacity’s bottleneck question.Secondly ,the hardware frame and the methods to calculating the power parameters are mainly discussed in this thesis.This paper mainly research based on double CPU(FPGA and C8051F120) system scheme of software design, system all this data processing system is realized, trouble wave record of the main start judgment, the data acquisition and data storage, and with fast Fourier Transform Algorithm (FFT) to analyze the harmonic of the voltage and current.Finally, we describe the characteristics and application of fault recorder.Key words: Fault recorder;Startup criteria; FFT ;High-speed data sampleII目录目录摘要 (I)Abstract ····································································································································I I1 绪论 (1)1.1 课题的背景与意义 (1)1.2国内外故障录波装置的发展和研究现状 (2)1.3 本课题的研究任务 (3)1.4 本章小结 (4)2 故障录波装置总体设计概述 (5)2.1 对故障录波装置设计的基本要求 (5)2.2 数据采集的主要技术指标 (6)2.3 数据记录时间及方式 (6)2.4 录波启动方式 (7)2.5 故障录波装置设计方案 (7)2.5.1 控制系统器件的选择 (7)2.5.2 主要外围电路器件的选择 (10)2.6 本章小结 (13)3 故障录波装置的硬件设计 (14)3.1 FPGA数据采集单元的硬件设计 (14)3.1.1 FPGA器件 (14)3.1.2模拟量采集电路 (14)3.1.3 实时时钟RTC模块 (14)3.1.4 开关量输入电路 (14)3.1.5 频率测量电路 (15)3.2 人机接口及管理单元的硬件设计 (15)3.2.1 C8051F120器件 (15)3.2.2 存储空间扩展电路 (15)3.2.3 人机接口电路 (15)3.3 硬件抗干扰措施 (15)3.4 本章小结 (15)目录4 故障录波装置总体设计概述 (17)4.1 FPGA数据采集单元的软件设计 (17)4.1.1 FPGA软件设计语言VHDL简介 (17)4.1.2 数据采集程序设计 (17)4.1.3 实时时钟模块 (19)4.1.4 双口RAM (20)4.2 管理模块软件设计 (21)4.2.1 人机接口程序设计 (22)4.2.2 数据储存的软件设计 (24)4.3 本章小结 (28)5 系统算法的选择及程序实现 (29)5.1 故障判断算法分析 (29)5.1.1 突变量启动算法 (29)5.1.2 稳态录波启动算法 (30)5.2 数据处理算法及程序设计 (31)5.3 本章小结 (38)6 系统调试及实验 (39)6.1 数据采集与分析测试 (39)6.2 故障录波测试 (41)6.2.1 模拟故障录波信号产生电路 (41)6.2.2 数据的储存 (42)6.3 本章小结 (42)7 结论 (43)7.1 结论 (43)致谢 (44)参考文献 (45)附录 (47)河北工程大学科信学院毕业设计说明书1 绪论1.1课题的背景与意义企业变电所在企业生产有着重要的地位,保证变电所的安全、可靠的运行是十分必要的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
双CPU数据处理系统设计
在嵌入式控制系统中经常需要对现场物理量进行数据采集与实时处理,且要求系统具有良好的人机交互功能,这时仅采用DSP 处理器往往不能满足要求。
本文选择以单片机为主处理单元(主要完成各种控制和接口功能)、DSP
芯片为从处理单元(主要完成数据运算和处理)的系统结构方案,该系统可独
立使用,也可与上位PC 机进行通信。
1 数据处理系统硬件总体设计方案
数据处理系统是指运用计算机处理信息而构成的系统。
其主要功能是
将输入的数据信息进行加工、整理,计算各种分析指标,变为易于被人们所接
受的信息形式,并将处理后的信息进行有序贮存,随时通过外部设备输给信息
使用者。
系统由MCU 处理器、DSP 处理器、8 位高速A/D 转换器以及FLASH 存储器等部分组成,传感器的信号送入高速A/D 转换器进行模数转换,结果送入DSP 中。
这里DSP 芯片采用了TI 公司具有高速数据运算和处理能力的TMS320VC5402,运算结果通过HPI 传送到单片机,利用单片机方便的接口电路和控制功能,输出并显示结果或送入PC 机做进一步处理。
2 数据处理系统硬件接口设计
2.1 A/D 接口电路设计
随着数字技术,特别是信息技术的飞速发展与普及,在现代控制、通信
及检测等领域,为了提高系统的性能指标,对信号的处理广泛采用了数字计算
机技术。
由于系统的实际对象往往都是一些模拟量(如温度、压力、位移、将
模拟信号转换成数字信号的电路,称为模数转换器(简称A/D 转换器或
ADC,Analog to Digital Converter);将数字信号转换为模拟信号的电路称为数模转换器(简称D/A 转换器或DAC,Digital to Analog Converter);A/D 转换器和。