汽车空气悬架计算机控制系统设计(最终修改版)
空气悬架课程设计

空气悬架课程设计一、教学目标本课程旨在让学生了解空气悬架的基本概念、工作原理及其在汽车工程中的应用。
通过学习,学生应掌握空气悬架的关键技术,并能分析其在提高汽车行驶性能和舒适性方面的优势。
此外,学生将能够运用空气悬架的相关知识,解决实际工程问题。
在情感态度价值观方面,学生应培养对汽车工程技术的兴趣,增强创新意识和实践能力。
二、教学内容本课程的教学内容主要包括空气悬架的基本概念、工作原理、关键技术和应用。
首先,介绍空气悬架的定义、发展历程和分类。
其次,讲解空气悬架的工作原理,包括气压调节、弹性元件和导向机构等。
然后,分析空气悬架的关键技术,如气压控制、悬挂调节和稳定性控制等。
最后,探讨空气悬架在提高汽车行驶性能和舒适性方面的优势和应用案例。
三、教学方法为了激发学生的学习兴趣和主动性,本课程将采用多种教学方法。
包括讲授法、讨论法、案例分析法和实验法等。
在讲授基本概念和原理时,采用讲授法,清晰地传达知识点。
在分析空气悬架的关键技术和应用时,采用讨论法,引导学生主动思考和探讨。
通过案例分析法,使学生更好地理解空气悬架在实际工程中的应用。
此外,安排实验环节,让学生亲身体验空气悬架的工作原理和性能。
四、教学资源为了支持教学内容和教学方法的实施,本课程将选择和准备多种教学资源。
教材方面,选用《汽车工程》一书,系统地介绍空气悬架的相关知识。
参考书方面,推荐《汽车悬挂系统设计与应用》等书籍,为学生提供更深入的理论学习资料。
多媒体资料方面,制作PPT课件,生动展示空气悬架的工作原理和应用案例。
实验设备方面,准备空气悬架模型和相关测试仪器,为学生提供实践操作的机会。
五、教学评估本课程的评估方式包括平时表现、作业和考试三个部分,以全面客观地评价学生的学习成果。
平时表现主要考察学生的出勤、课堂参与度和团队合作等方面,占总评的20%。
作业分为课后练习和项目报告,占总评的30%。
考试为闭卷笔试,内容涵盖课程所有知识点,占总评的50%。
汽车悬挂系统新技术——电控空气悬架及主动悬架PPT课件
4
2021
2. 汽车主动悬架
现代汽车中的悬架有两种,一种是从动悬架,另一种是主动 悬架。从动悬架即传统式的悬架,是由弹簧、减振器(减振筒)、导 向机构等组成,它的功能是减弱路面传给车身的冲击力,衰减由 冲击力而引起的承载系统的振动。
其中弹簧主要起减缓冲击力的作用,减振器的主要作用是衰 减振动由于这种悬架是由外力驱动而起作用的,所以称为从动悬 架。
6
2021
另外,主动悬架具有控制车身运动的功能。当汽车制动 或拐弯时的惯性引起弹簧变形时,主动悬架会产生一个与 惯力相对抗的力,减少车身位置的变化。例如德国奔驰 2000款CL型跑车,当车辆拐弯时悬架传感器会立即检测 出车身的倾斜和横向加速度,电脑根据传感器的信息,与 预先设定的临界值进行比较计算,立即确定在什么位置上 将多大的负载加到悬架上,使车身的倾斜减到最小。
而主动悬架的控制环节中安装了能够产生抽动的装置,采用 一种以力抑力的方式来抑制路面对车身的冲击力及车身的倾斜力。 由于这种悬架能够自行产生作用力,因此称为主动悬架。
5
2021
主动悬架是近十几年发展起来的,由电脑控制的一种新型悬架, 具备三个条件:
(1) 具有能够产生作用力的动力源; (2) 执行元件能够传递这种作用力并能连续工作; (3) 具有多种传感器并将有关数据集中到微电脑进行运算并 决定控制方式。 因此,主动悬架汇集了力学和电子学的技术知识,是一种
比较复杂的高技术装置。例如装置了主动悬架的法国雪铁龙桑 蒂雅,该车悬架系统的中枢是一个微电脑,悬架上有5种传感 器,分别向微电脑传送车速、前轮制动压力、踏动油门踏板的 速度、车身垂直方向的振幅及频率、转向盘角度及转向速度等 数据。电脑不断接收这些数据并与预先设定的临界值进行比较, 选择相应的悬架状态。同时,微电脑独立控制每一只车轮上的 执行元件,通过控制减振器内油压的变化产生抽动,从而能在 任何时候、任何车轮上产生符合要求的悬架运动。因此,桑蒂 雅桥车备有多种驾驶模式选择,驾车者只要扳动位于副仪表板 上的"正常"或"运动"按钮,轿车就会自动设置在最佳的悬架状 态,以求最好的舒适性能。
空气悬架系统设计
优秀完整毕业设计资料,欢迎下载借鉴!!!摘要本论文根据有关汽车模型简化的理论,在现有的四分之一模拟悬架机械装置的基础上,用空气弹簧代替普通螺旋弹簧设计空气悬架试验台系统。
本试验台实现的是悬架的刚度可调。
设计一个副气室,通过一个步进电机控制主、副气室间通路的大小来实现空气弹簧刚度的调节。
本试验台由空气压缩机、滤清器、安全阀、空气弹簧、减振器和其它的相关部件组成机械振动系统,由传感器、ECU和执行元件组成测控系统,利用传感器采集信号,通过计算机处理,控制高度阀和步进电机,从而使簧上质量的高度和振动频率都在一定的范围之内。
本论文首先进行了弹簧的选用并计算以及减振器、传感器、气动元件和步进电机的选用,然后是设计台架总体结构,布置信号采集装置以及校核重要零件,最后是画出总成的装配图、重要零件的零件图。
关键词:汽车振动;空气弹簧;可控空气悬架;悬架试验台AbstractThe thesis according to the theory which simplifies about the model of vehicle, on the base of a quarter car simulation suspension mechanism rig, the ordinary helical spring is replaced by an air spring, and the air suspension testing rig have been designed.The test rig put the suspension rigidity adjustment into practice. Designs an accessory airspace, controls the pipeline size between the main and the accessory airspace with the stepper motor and realizes the air spring variable stiffness. The mechanical vibrating system of the test rig is composed of the air compressor、the filter、the safety valve、the air spring、the shock absorber and other related parts, the measure and control system is composed of the sensor、ECU and the performance element. Using the sensor gathers signal, then the ECU analyses and controls the height valve and the stepper motor to make the height and the vibration frequency of the objects on the air spring in certain scope. The thesis has first carried on spring selection and calculates as well as the shock absorber, the sensor, the air operated part and the stepper motor selection, then designs the test rig structure, arranges signal gathering equipment and examine the important components, finally draws the assembly drawing and the detail drawings of the important parts.Key Words:Automobile vibration, Air spring, Controllable air suspension, The suspension test rig目录前言 (4)第一章绪论 (5)第二章汽车振动的简化及分析 (10)第三章空气悬架系统元件概述 (14)第四章信号采集、控制元件的选择 (21)第五章机械元件的设计、校核 (25)前言悬架是现代汽车上的重要总成之一,它把车架(或车身)与车轴(或车轮)弹性地连接起来,主要功能是传递作用在车轮和车架(或车身)之间的一切力和力矩,并且缓和由不平路面传给车架(或车身)的冲击载荷,削弱由此引起的承载系统的振动,以保证汽车平顺的行驶。
越野车空气悬架控制系统设计说明书1.2
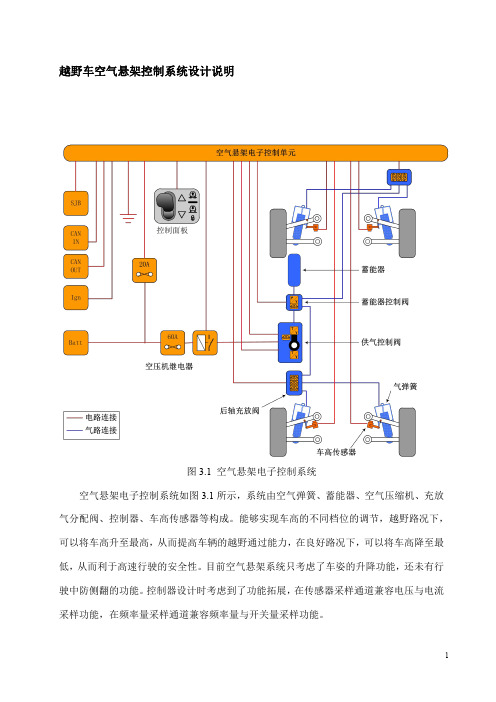
越野车空气悬架控制系统设计说明图3.1空气悬架电子控制系统空气悬架电子控制系统如图3.1所示,系统由空气弹簧、蓄能器、空气压缩机、充放气分配阀、控制器、车高传感器等构成。
能够实现车高的不同档位的调节,越野路况下,可以将车高升至最高,从而提高车辆的越野通过能力,在良好路况下,可以将车高降至最低,从而利于高速行驶的安全性。
目前空气悬架系统只考虑了车姿的升降功能,还未有行驶中防侧翻的功能。
控制器设计时考虑到了功能拓展,在传感器采样通道兼容电压与电流采样功能,在频率量采样通道兼容频率量与开关量采样功能。
3.1控制系统的设计采用MC9S12XEP100单片机,负责采集传感信号,实现CAN总线通讯,输出信号控制输出电路。
由频率量采样电路、模拟量采样电路、驱动电路、CAN总线通讯电路组成,通讯速率250kps。
图3.2硬件系统原理频率量采样电路实现对转速、空气流量传感器等具有脉冲输出的功能信号的采集,同时也能实现对开关信号的采集。
模拟量采样电路可以实现对开关信号的采集,也能实现对方向盘转角、车高角位移、气压、气温等传感器信号的采集。
驱动电路实现对气泵电机继电器的通断控制、悬架充放气阀件的控制。
CAN总线接口电路实现与整车总线的连接,采集车姿指令信息、当前车速信息、行驶操纵信息等信号;实现数据的上传;实现软件升级下载。
1.供电电路设计图3.3供电电路设计设定车载供电为24V,电压波动范围是16V至32V。
如果车载供电电压为12V,则将LM2937-12的输入与输出短接即可。
在此电路设计中增加输入电压钳位保护,利用SMCJ36A将输入电压保护在36V以下,实现对LM2575的保护;利用SMAJ6.0A将单片机工作电压保护在6V以下,防止在调试时操作不当,由于电压过高损坏单片机。
车载传感器可由VCC或+12VDC供电。
2.CAN总线电路设计图3.4CAN总线电路设计相对而言,PCA82C251相对其它芯片TJA1050、TJA1040、具有更广范围的供电电压,因此选用82C51。
解放J6-空气悬架控制系统.pdf

R&D CENTER
• 气囊的作用类似一个变刚度的钢板弹簧
一汽技术中心换代车项目组
2007-3-27 12
J6 系列车型培训材料——电控部分
R&D CENTER
系统功能
一汽技术中心换代车项目组
2007-3-27 13
J6 系列车型培训材料——电控部分
R&D CENTER
19 CA4180P66K2A系统功能原理图
标定-高度传感器2
一汽技术中心换代车项目组
R&D CENTER
标定时, 需要输入 PIN码, 获得进行 标定的许 可。与系 统供应商 联系以获 得PIN码
2007-3-27 41
J6 系列车型培训材料——电控部分
标定-高度传感器3
R&D CENTER
按流程图进行 高度传感器的标定
一汽技术中心换代车项目组
一汽技术中心换代车项目组
2007-3-27 10
J6 系列车型培训材料——电控部分
R&D CENTER
遥控器
• 驾驶员可以通过遥控器 对空气悬架进行高度调 整操作。
• 遥控器的安装位置:驾 驶员座椅左后侧
3 2 1
一汽技术中心换代车项目组
2007-3-27 11
J6 系列车型培训材料——电控部分
一汽技术中心换代车项目组
2007-3-27 6
J6 系列车型培训材料——电控部分
R&D CENTER
控制单元(ECU)
• 系统核心 • 接收高度传感器的输入信
号 • 比较当前高度值与目标高
度值 • 控制电磁阀 • 和诊断设备(诊断仪/PC)
进行数据交换
汽车悬挂系统新技术——电控空气悬架及主动悬架课件
电控空气悬架系统的优点与不足
• 优点 • 高度可调:电控空气悬架系统可以根据车辆载重和行驶状态自动调节悬挂系统的高度,从而提高车辆的通
过性和舒适性。 • 刚度可调:系统可以根据路面情况和行驶状态自动调节空气弹簧的刚度,从而提供更好的操控性和舒适性
。 • 智能控制:电控空气悬架系统能够根据车辆行驶状态和路面信息进行实时调整,提高车辆的适应性和安全
未来汽车悬挂系统的发展方向和挑战
发展方向
未来汽车悬挂系统将朝着更加智能化、电动化和轻量化的方 向发展,以适应新能源汽车和智能驾驶的需求。
挑战
随着悬挂系统技术的不断发展,也面临着一些挑战,如如何 提高悬挂系统的性能和可靠性,如何降低成本和提高生产效 率等。
THANKS
电控空气悬架及主动悬架的技术特点和应用前景
电控空气悬架及主动悬架的技术特点
电控空气悬架能够根据车辆行驶状态和路面情况自动调节悬挂系统的刚度和高度,提高行驶平顺性和操控性; 主动悬架则能够根据车辆行驶状态和路面情况主动调节悬挂系统的刚度和阻尼,进一步提高车辆的操控性和稳 定性。
应用前景
随着消费者对车辆舒适性和操控性的要求不断提高,电控空气悬架及主动悬架的应用前景越来越广阔,未来将 在更多车型中得到应用。
适用范围
由于电控空气悬架系统的成本较高,因此其适用范围主要集中在高端市场和 豪华车型中。同时,该系统也适用于一些特殊用途的车辆,如运输车、救援 车等。
03
主动悬架系统
主动悬架系统的结构与原理
主动悬架系统的结构
主动悬架系统主要包括传感器、控制器和执行器。传感器负责监测车辆行驶状态 和路面信息,控制器根据传感器信号计算出最佳的悬挂系统状态,执行器则根据 控制器的指令调整悬挂系统的工作参数。
空气悬挂控制算法

空气悬挂控制算法1.引言1.1 概述空气悬挂技术是指通过在车辆悬挂系统中引入空气弹簧和电磁阀等装置,以实现对车辆悬挂高度的精确控制。
相比传统的机械悬挂系统,空气悬挂技术能够利用气压调节车身高度,进而提供更加舒适的乘坐体验和更好的悬挂性能。
为了实现对空气悬挂系统的精确控制,需要使用特定的算法进行辅助。
空气悬挂控制算法是指通过对悬挂系统中的空气泵、阀门和传感器等元件进行控制,以实现对悬挂高度、硬度和稳定性等参数的实时调节和控制。
在空气悬挂控制算法中,需要考虑的因素包括车辆的负载情况、行驶速度、路况等。
算法会通过悬挂系统中的传感器获取这些数据,并根据预设的控制策略进行实时调整。
例如,在行驶过程中,当车辆遇到不平的路面时,算法会根据传感器获取的数据,自动调整悬挂高度和硬度,以保证乘坐的舒适性和悬挂系统的稳定性。
空气悬挂控制算法的研究旨在优化悬挂系统的性能,提升车辆的操控性和乘坐舒适性。
通过精确调整悬挂参数,可以有效地减少车辆在行驶过程中的颠簸感,提高车辆的稳定性和操控性,同时对于不同的用途和需求,也可以根据实际情况进行个性化的设置。
在本篇文章中,我们将介绍空气悬挂技术的基本原理和应用,重点介绍空气悬挂控制算法的设计原则和常用方法。
通过对现有算法的分析和比较,我们旨在为读者提供一个全面了解空气悬挂控制算法的基础,并为未来的研究和应用提供一些参考和启发。
同时,本文也将探讨目前空气悬挂控制算法存在的挑战和改进方向,展望未来在这一领域的发展前景。
通过深入研究和创新,相信空气悬挂技术在汽车工程领域将有更广阔的应用前景。
文章结构部分的内容应该包括对整篇文章的组织和章节安排进行说明。
可以按照如下方式来编写文章1.2 文章结构部分的内容:文章结构部分的主要目的是介绍整篇文章的组织架构,以便读者能够清楚地了解整个文章的结构。
本文主要分为引言、正文和结论三个部分。
引言部分包括概述、文章结构和目的三个小节。
在概述部分,将引入空气悬挂控制算法的背景和重要性。
悬架系统设计汽车悬架系统设计
装配与涂装
按照工艺流程进行装配,采用 自动化涂装设备,确保产品外
观质量。
检测与试验
对成品进行全面的检测和试验 ,确保产品性能符合设计要求
。
关键工艺参数控制
热处理工艺参数
控制加热温度、保温时间和冷却速度等参数,确 保材料的力学性能和金相组织符合要求。
焊接工艺参数
选择合适的焊接方法和焊接参数,确保焊缝质量 和强度。
解决关键技术难题
在悬架系统设计过程中,攻克了多项关键技术难题,如非线性阻尼特性控制、多自由度振 动解耦等,为悬架系统的研发和应用提供了有力支持。
行业发展趋势预测
智能化悬架系统成为发展热点
随着智能驾驶技术的不断发展,智能化悬架系统将成为未来汽车悬架 系统的重要发展方向,实现与车辆控制系统的高度集成和协同工作。
验证与测试
通过实车试验或台架试验等方式,验证优化后的悬架系统的性能和可 靠性,确保满足设计要求。
05 悬架系统制造工艺与质量 控制
制造工艺流程规划
01
02
03
04
原材料选择与检验
选用高强度、轻量化的材料, 并进行严格的入厂检验,确保
原材料质量。
零部件加工
采用先进的数控机床和加工工 艺,确保零部件的尺寸精度和
稳定性分析
研究车辆和悬架系统在受到外部扰动时的稳定性,包括侧倾稳定 性、俯仰稳定性和横摆稳定性等。
仿真模拟与优化设计
仿真模拟
利用计算机仿真软件,对悬架系统进行动力学仿真模拟,分析系统 的运动学和力学特性,以及车辆的行驶平顺性和操纵稳定性。
优化设计
根据仿真结果和实际需求,对悬架系统的结构参数、刚度和阻尼等 进行优化设计,提高车辆的行驶性能和舒适性。
汽车空气悬架计算机控制系统设计(最终修改版)
北京理工大学珠海学院2006届本科生毕业设计汽车空气悬架计算机控制系统设计摘要由于在平顺性和车高控制上的诸多优点,越来越多的客车生产商已经开始使用电子控制空气悬架,通过控制弹簧刚度和减振器的阻尼来获得好的平顺性和操纵稳定性。
本文设计对汽车在制动、转向、加速、高速等工况下的空气弹簧刚度的调节来实现对悬架刚度的控制,在不同车速下对车高的调节以减少风阻。
通过介绍悬架的种类和特点,分析空气悬架当前发展状况,概述平顺性的研究内容,提出本文研究的主要内容和基本流程。
文中以简化的汽车1/4悬架模型为基础,通过分析刚度和系统频率对平顺性的影响,得出空气悬架的主要控制参数。
接着使用MATLAB/SIMULINK计算机仿真软件,模拟路面随机输入,仿真被动悬架及空气悬架的加速度变化,通过对比看出其优点。
MCS-96系列单片机在接口、抗干扰及运算速度方面的特点,使得其系列单片机在实现对悬架的控制方面有着较大的优势。
本文使用MCS-96系列单片机汇编语言编译控制程序,编写出各功能子系统程序段,以顺序执行指令模式运行,通过对各传感器的信号来判断行驶状况,从而输出对应的控制信号。
硬件使用80C196KC单片机。
关键字:空气弹簧电控悬架控制程序仿真单片机Air Suspension Control System DesignABSTRACTAs the car ride and the many advantages of high control, more and more bus manufacturers have begun using electronic control air suspension, by controlling the spring stiffness and damping shock absorbers to get a good ride comfort and handling stability.In this paper, we design to adjust the air spring stiffness to achieve the control of the suspension stiffness in the braking, steering, acceleration, speed and other working conditions. By adjusting the stiffness of the spring and shock absorber damping to reduce the wind resistance in high-speed condition. By introducing the suspension of the type and characteristics of the current development of air suspension, ride comfort of an overview of the contents of this paper presented the main content and basic processes. By simplifying the car 1 / 4 suspension model, analyzing the stiffness and system frequency on the Ride, come to the main control parameters of air suspension. Then use the MATLAB / SIMULINK simulation software to simulate the random road input, simulation passive suspension and air suspension, acceleration changes, by comparing to see its advantages.As the MCS-96 series MCU interface, interference, and the characteristics of computing speed, makes the MCS-96 family of single chip to achieve the control of the suspension has a big advantage. This article uses the MCS-96 Microcontroller assembly language compiler control procedures, the preparation of the segment of each functional subsystem, to order the implementation of instruction mode, the signal on each sensor to determine the operating conditions, and thus the corresponding output control signals. Use 80C196KC MCU. Keywords: air spring; ECAS; control procedures; SIMULINK; MCU目录摘要 (I)ABSTRACT ................................................... I I 1绪论.. (1)1.1悬架概述 (1)1.2悬架的分类 (1)1.3主动悬架 (2)1.4空气悬架发展和现状 (2)1.5平顺性理论概述 (3)1.6本文的主要内容 (4)2空气悬架的工作原理及功能 (5)2.1空气悬架工作原理 (5)2.2空气悬架功能 (5)3空气悬架系统 (7)3.1空气悬架主要元件结构 (7)3.2空气悬架输入输出部件 (7)3.3空气悬架的具体工作方式 (13)4空气悬架数学模型 (14)4.1垂直刚度设计计算: (14)4.2空气弹簧系统频率的计算 (14)4.3单质量系统的自由振动 (15)5系统控制流程 (16)5.1总控制流程图 (16)5.2各子系统流程图 (17)6系统仿真计算 (24)6.1MATLAB软件介绍 (24)6.2路面激励谱 (25)6.3SIMULINK计算仿真 (26)7汇编程序设计 (30)7.1MCS-96系列单片机的特点 (30)7.2汇编语言程序工作原理 (30)7.3硬件图 (32)本文总结 (35)参考文献 (36)注释 (37)附录 (38)谢辞 (45)1 绪论1.1 悬架概述悬架是汽车的重要组成部分,它把车体和车轴弹性地连接起来,并承受作用在车轮和车体之间的作用力,缓冲来自不平路面给车体传递的冲击载荷,衰减各种动载荷引起的车体振动。
电子控制空气悬架系统
第9章 电子控制空气悬架系统
6
丰田雷克萨斯LS-400车系空气悬 架控制系统的电路图
第9章 电子控制空气悬架系统
7
第9章 电子控制空气悬架系统
9.3 空气悬架刚度及阻尼力调节
9.3.1空气悬架刚度的调节
主、副气室之间的通路靠气阀控制,开关气阀的控制杆由悬架控制执 行器驱动,当气阀处于不同的位置时,即大开、小开、关闭时,可实现空 气弹簧低、中、高三种状态的刚度调节。
11
9.3.3车身高度的调节
第9章 电子控制空气悬架系统
车身高度调节装置由空气压缩机、直流电机、高度控制电磁阀、排气
电磁阀、调压阀、空气干燥器等组成。
12
第9章 电子控制空气悬架系统
9.4 空气悬架系统主要组成部件结构原理
9.4.1悬架控制开关
悬架控制开关安装在变速器操作手柄附近,是两个跷板式开关,它包括:
9.4.9可充气气缸
每个可充气气缸由一个充满低压氮气的可调减振力的减振器,一个储存压缩 空气的主空气室和一个副空气室组成。
减振器的减振力是改变旁通活塞节油流口的流量来改变的。
9.4.10悬架ECU
根据各种传感器的信号,以及悬架控制开关操作方法的选择(LRC开关和高 度控制开关),悬架ECU控制减振器减振力,悬架弹簧刚度和汽车高度, ECU还具有自我诊断功能。
14
第9章 电子控制空气悬架系统
9.4.4 高度控制传感器
高度控制传感器安装在每个油气缸悬架上,持续不断地检测车身与悬 架下臂之间的距离,每个传感器由一个有槽圆盘和4对遮光器组成,有槽 圆盘与连接杆合成一个组件并随之一起旋转,有槽圆盘的LED与每个遮光 器的光敏晶体管之间旋转 。
15
第9章 电子控制空气悬架系统
空气悬架设计计算说明书
大客车前空气悬架设计计算说明书毕业设计(论文)开题报告完成;2.设计的目的及意义至少800字,基本内容和技术方案至少400字;3.指导教师意见应从选题的理论或实际价值出发,阐述学生利用的知识、原理、建立的模型正确与否、学生的论证充分否、学生能否完成课题,达到预期的目标。
郑重声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包括任何其他个人或集体已经发表或撰写的成果作品。
本人完全意识到本声明的法律后果由本人承担。
本人签名:日期:目录摘要 (1)Abstract (2)1绪论 (3)1.1悬架的概述 (3)1.2悬架的分类 (4)1.3悬架技术的研究现状及发展趋势 (5)2空气悬架结构 (7)2.1空气悬架结构简介 (7)2.2 空气悬架系统的工作原理8 ··························3 空气悬架系统结构方案设计 (10)3.1空气弹簧悬架与机械弹簧悬架比较 (10)3.2空气弹簧的种类及布置问题 (10)3.3高度控制阀 (11)3.4反弹限位 (13)3.5减振器 (13)3.6导向机构的选择及布置............................................................... . (14)4 悬架主要参数的确定 (16)4.1 大客车的结构参数 (16)4.2 悬架静挠度 (18)4.3 悬架动挠度 (18)4.4 悬架弹性特性 (19)5 弹性元件的设计 (20)5.1 空气弹簧力学性能 (21)5.2 高度控制阀 (22)6 悬架导向机构的设计 (24)6.1 悬架导向机构的概述及强度受力计算 (24)6.2 横向稳定杆的选择 (26)6.3 稳定杆的横向载荷及强度 (26)6.4 悬架及整车的刚度 (27)7 减振器机构类型及主要参数的选择计算 (30)7.1 减震器分类 (30)7.2减震器的选定及阻尼力的计算 (32)总结 (34)参考文献 (35)致谢 (36)摘要本设计书首先收集了悬架的一些知识,在此基础上提出了空气悬架优缺点。
汽车电控技术第9章 电子控制空气悬架系统
18
1.LRC开关 . 开关
选择减振器阻尼力和弹簧刚度(SPORT-运动自动;NORM-正常自动), LRC关的操作可通过仪表盘中的指示灯显示出来,处于“SPORT”时,仪 表盘中“SPORT”灯亮;处于“NORM”时,指示灯灭。
2.高度控制开关 高度控制开关
选择汽车目标高度(HEIGHT-高;NORM-正常),高度控制开关的操作,也 通过仪表盘中的“NORM”和“HI”灯显示,高度控制开关变换到一个位置 时,很快显示,但离达到目标高度需要一定时间。
第9章 电子控制空气悬架系统
第9章 电子控制空气悬架系统 章
1
第9章 电子控制空气悬架系统
电控空气悬架系统的功能 电控空气悬架系统的基本组成、控制原理和结构特点 电控空气悬架系统中弹簧刚度调节、减振器阻尼力调节、车身高度调节的基 本方法。
2
第9章 电子控制空气悬架系统
9.1 概 述
电控空气悬架是利用压缩空气充当弹簧起作用,弹簧的刚度和车身 的高度是根据汽车行驶状况进行自动控制,减振器的减振力控制也用来抑 制汽车行驶和停止中车身姿势的变化。 其具体功能有三个方面: (1)在水平路面上高速行驶时,使车身变低、弹簧变软,以提高舒服性。 (2)在凹凸不平的路面行驶时,车身变高,使悬架变硬,以消除颠波, 提高通过性。 (3)防止纵向仰头和栽头及横向倾斜,保持前照灯光轴不变,提高安全 性。 空气悬架的控制包括减振力和弹簧刚度控制以及汽车高度控制两方面。 空气悬架的控制包括减振力和弹簧刚度控制以及汽车高度控制两方面。
9.2
电控空气悬架的组成
空气悬架包括:每一车轮有一个可充气的气缸和减振器;一个空气压 缩机;干燥器;各种控制阀;高度控制传感器;转向角度传感器等,能精 确地检测车身高度和行驶状态。
单片机在汽车电控空气悬架系统中的应用
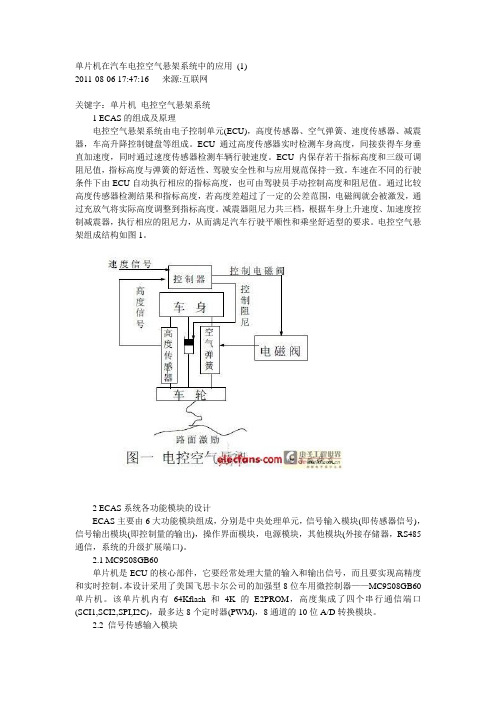
单片机在汽车电控空气悬架系统中的应用(1)2011-08-06 17:47:16 来源:互联网关键字:单片机电控空气悬架系统1 ECAS的组成及原理电控空气悬架系统由电子控制单元(ECU),高度传感器、空气弹簧、速度传感器、减震器,车高升降控制键盘等组成。
ECU通过高度传感器实时检测车身高度,间接获得车身垂直加速度,同时通过速度传感器检测车辆行驶速度。
ECU内保存若干指标高度和三级可调阻尼值,指标高度与弹簧的舒适性、驾驶安全性和与应用规范保持一致。
车速在不同的行驶条件下由ECU自动执行相应的指标高度,也可由驾驶员手动控制高度和阻尼值。
通过比较高度传感器检测结果和指标高度,若高度差超过了一定的公差范围,电磁阀就会被激发,通过充放气将实际高度调整到指标高度。
减震器阻尼力共三档,根据车身上升速度、加速度控制减震器,执行相应的阻尼力,从而满足汽车行驶平顺性和乘坐舒适型的要求。
电控空气悬架组成结构如图1。
2 ECAS系统各功能模块的设计ECAS主要由6大功能模块组成,分别是中央处理单元,信号输入模块(即传感器信号),信号输出模块(即控制量的输出),操作界面模块,电源模块,其他模块(外接存储器,RS485通信,系统的升级扩展端口)。
2.1 MC9S08GB60单片机是ECU的核心部件,它要经常处理大量的输入和输出信号,而且要实现高精度和实时控制。
本设计采用了美国飞思卡尔公司的加强型8位车用微控制器——MC9S08GB60单片机。
该单片机内有64Kflash和4K的E2PROM,高度集成了四个串行通信端口(SCI1,SCI2,SPI,I2C),最多达8个定时器(PWM),8通道的10位A/D转换模块。
2.2 信号传感输入模块该模块主要由3个高度传感器和1个速度传感器构成。
车身高度传感器等效电感串联电阻。
等效电感0°转角时对应约20mH,-45°转角时对应约8mH,+45°转角时对应约35mH。
悬挂运动控制系统设计报告
悬挂运动控制系统设计王奇彪 梁美 谭延龄摘要:本系统采用STC89C52单片机作为悬挂控制系统的检测和控制核心,实现通过人机界面对物体所作运动进行设定,通过LCD 实时显示此时画笔所在的坐标值;系统具有可画出相应的运动轨迹,可自动跟踪曲线运动,和画圆运动等功能。
运动参数的设定通过红外遥控输入。
系统通过比较当前画笔所在位置与设定的位置的差异以及运动类型,控制步进电机完成相应运动;曲线跟踪采用红外对射式传感器来实现。
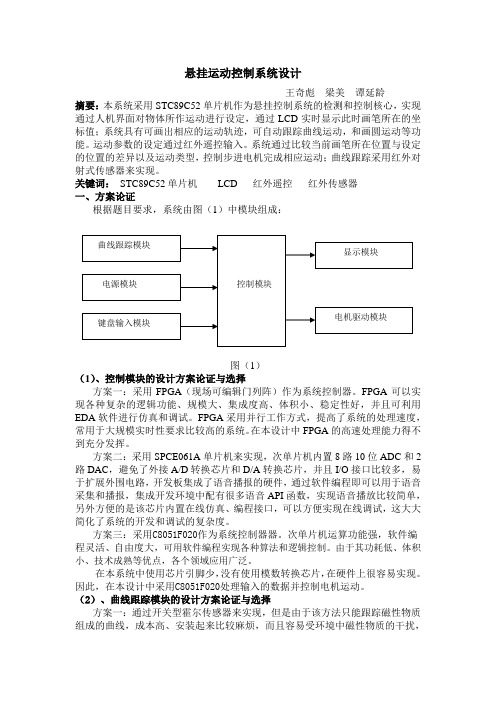
关键词: STC89C52单片机 LCD 红外遥控 红外传感器一、方案论证根据题目要求,系统由图(1)中模块组成:图(1)(1)、控制模块的设计方案论证与选择方案一:采用FPGA (现场可编辑门列阵)作为系统控制器。
FPGA 可以实现各种复杂的逻辑功能、规模大、集成度高、体积小、稳定性好,并且可利用EDA 软件进行仿真和调试。
FPGA 采用并行工作方式,提高了系统的处理速度,常用于大规模实时性要求比较高的系统。
在本设计中FPGA 的高速处理能力得不到充分发挥。
方案二:采用SPCE061A 单片机来实现,次单片机内置8路10位ADC 和2路DAC ,避免了外接A/D 转换芯片和D/A 转换芯片,并且I/O 接口比较多,易于扩展外围电路,开发板集成了语音播报的硬件,通过软件编程即可以用于语音采集和播报,集成开发环境中配有很多语音API 函数,实现语音播放比较简单,另外方便的是该芯片内置在线仿真、编程接口,可以方便实现在线调试,这大大简化了系统的开发和调试的复杂度。
方案三:采用C8051F020作为系统控制器器。
次单片机运算功能强,软件编程灵活、自由度大,可用软件编程实现各种算法和逻辑控制。
由于其功耗低、体积小、技术成熟等优点,各个领域应用广泛。
在本系统中使用芯片引脚少,没有使用模数转换芯片,在硬件上很容易实现。
因此,在本设计中采用C8051F020处理输入的数据并控制电机运动。
(2)、曲线跟踪模块的设计方案论证与选择方案一:通过开关型霍尔传感器来实现,但是由于该方法只能跟踪磁性物质组成的曲线,成本高、安装起来比较麻烦,而且容易受环境中磁性物质的干扰,控制模块 曲线跟踪模块 电源模块键盘输入模块 显示模块 电机驱动模块抗干扰性能不好。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽车空气悬架计算机控制系统设计摘要由于在平顺性和车高控制上的诸多优点,越来越多的客车生产商已经开始使用电子控制空气悬架,通过控制弹簧刚度和减振器的阻尼来获得好的平顺性和操纵稳定性。
本文设计对汽车在制动、转向、加速、高速等工况下的空气弹簧刚度的调节来实现对悬架刚度的控制,在不同车速下对车高的调节以减少风阻。
通过介绍悬架的种类和特点,分析空气悬架当前发展状况,概述平顺性的研究内容,提出本文研究的主要内容和基本流程。
文中以简化的汽车1/4悬架模型为基础,通过分析刚度和系统频率对平顺性的影响,得出空气悬架的主要控制参数。
接着使用MATLAB/SIMULINK计算机仿真软件,模拟路面随机输入,仿真被动悬架及空气悬架的加速度变化,通过对比看出其优点。
MCS-96系列单片机在接口、抗干扰及运算速度方面的特点,使得其系列单片机在实现对悬架的控制方面有着较大的优势。
本文使用MCS-96系列单片机汇编语言编译控制程序,编写出各功能子系统程序段,以顺序执行指令模式运行,通过对各传感器的信号来判断行驶状况,从而输出对应的控制信号。
硬件使用80C196KC单片机。
关键字:空气弹簧电控悬架控制程序仿真单片机Air Suspension Control System DesignABSTRACTAs the car ride and the many advantages of high control, more and more bus manufacturers have begun using electronic control air suspension, by controlling the spring stiffness and damping shock absorbers to get a good ride comfort and handling stability.In this paper, we design to adjust the air spring stiffness to achieve the control of the suspension stiffness in the braking, steering, acceleration, speed and other working conditions. By adjusting the stiffness of the spring and shock absorber damping to reduce the wind resistance in high-speed condition. By introducing the suspension of the type and characteristics of the current development of air suspension, ride comfort of an overview of the contents of this paper presented the main content and basic processes. By simplifying the car 1 / 4 suspension model, analyzing the stiffness and system frequency on the Ride, come to the main control parameters of air suspension. Then use the MATLAB / SIMULINK simulation software to simulate the random road input, simulation passive suspension and air suspension, acceleration changes, by comparing to see its advantages.As the MCS-96 series MCU interface, interference, and the characteristics of computing speed, makes the MCS-96 family of single chip to achieve the control of the suspension has a big advantage. This article uses the MCS-96 Microcontroller assembly language compiler control procedures, the preparation of the segment of each functional subsystem, to order the implementation of instruction mode, the signal on each sensor to determine the operating conditions, and thus the corresponding output control signals. Use 80C196KC MCU.Keywords: air spring; ECAS; control procedures; SIMULINK; MCU目录摘要 (I)ABSTRACT ................................................... I I 1 绪论.. (1)1.1 悬架概述 (1)1.2 悬架的分类 (1)1.3 主动悬架 (2)1.4 空气悬架发展与现状 (2)1.5 平顺性理论概述 (3)1.6 本文的主要内容 (4)2 空气悬架的工作原理及功能 (5)2.1 空气悬架工作原理 (5)2.2 空气悬架功能 (5)3 空气悬架系统 (7)3.1 空气悬架主要元件结构 (7)3.2 空气悬架输入输出部件 (7)3.3 空气悬架的具体工作方式 (13)4 空气悬架数学模型 (14)4.1 垂直刚度设计计算: (14)4.2 空气弹簧系统频率的计算 (14)4.3 单质量系统的自由振动 (15)5 系统控制流程 (16)5.1 总控制流程图 (16)5.2 各子系统流程图 (17)6 系统仿真计算 (24)6.1 MATLAB软件介绍 (24)6.2 路面激励谱 (25)6.3 SIMULINK计算仿真 (26)7 汇编程序设计 (30)7.1 MCS-96系列单片机的特点 (30)7.2 汇编语言程序工作原理 (30)7.3 硬件图 (32)本文总结 (35)参考文献 (36)注释 (37)附录 (38)谢辞 (45)1 绪论1.1 悬架概述悬架是汽车的重要组成部分,它把车体与车轴弹性地连接起来,并承受作用在车轮和车体之间的作用力,缓冲来自不平路面给车体传递的冲击载荷,衰减各种动载荷引起的车体振动。
悬架对汽车的行驶平顺性、乘座舒适性及操纵稳定性等多种使用性能都有很大影响,因此悬架设计一直是汽车设计人员非常关注的问题之一。
汽车悬架尽管有各种不同的结构形式,但一般都是由弹性元件、减振器和导向机构三部分组成。
由于汽车行驶的路面不可能绝对平坦,路面作用于车轮上的垂直反力往往是冲击性的,特别是在坏路面上高速行驶时,这种冲击力将达到很大的数值。
冲击力传到车身时,可能引起汽车机件的早期损坏;传给乘员和货物时,将使乘员感到极不舒适,货物也可能受到损伤。
为了缓和冲击,在汽车行驶系中,除了采用弹性的充气轮胎之外,在悬挂中还必须装有弹性元件,使车身与车轮之间作弹性联系。
但弹性系统在受到冲击后,将产生振动。
持续的振动易使乘员感到不舒适和疲劳。
故悬挂系统还应具有减振作用,以使振动迅速衰减,振幅迅速减小。
为此,在许多形式的悬挂系统中都设有专门的减振器[1]。
1.2 悬架的分类悬架的结构形式较多,按导向机构的形式,可分为独立悬架和非独立悬架两大类。
按工作原理不同,悬架可分为被动悬架、半主动悬架及主动悬架三种。
目前在汽车上普遍采用的多为被动悬架。
随着汽车速度的提高,对汽车悬架的性能提出了越来越高的要求。
由于被动悬架存在本质性的问题,设计人员无法对其结构进行改造和参数优化以达到期望的性能指标,所以半主动悬架和主动悬架越来越受到汽车制造商和汽车研究人员的关注。
只有半主动悬架和主动悬架可以采用电子控制的方式,即通常所说的电控悬架。
悬架电子控制的目的在于如下几点[2]。
a. 降低路面凹凸不平引起的加速度和车身急剧跳动对乘员的影响。
b. 减少汽车行驶时的车身姿态变化(如侧倾、纵摇、俯仰等)。
c. 保证在弯曲路段行驶时的操纵稳定性。
d. 在乘客数目和载货质量变化时维持车身高度不变,并在高速行驶时降低车辆高度,在粗糙路面行驶时增加车辆高度。
随着半主动悬架和主动悬架在商用车上应用范围的扩大,对作为其主要组成部分的空气弹簧的研究显得越来越重要。
1.3 主动悬架平顺性和操纵稳定性对汽车悬挂系统这一互为矛盾的要求,在传统的被动悬挂系统设计中几乎无法同时满足。
即使经过慎重的权衡,通过最优控制理论使悬架系统在平顺性和操纵稳定性之间寻求一个折衷的方案,而这种最优的折衷也只能是在特定的道路状态和速度下达到。
为了克服传统的被动悬挂系统对其性能改善的限制,在现代汽车中采用和发展了新型的电子控制悬挂系统。
电子控制悬挂系统可以根据不同的路面条件,不同的载重质量,不同的行驶速度等,来控制悬挂系统的刚度、调节减振器的阻尼力大小,甚至可以调整车身高度,从而使车辆的平顺性和操纵稳定性在各种行驶条件下达到最佳的组合。
主动悬架是一种具有做功能力的悬架,不周于单纯吸收能量、缓和冲击的传统悬架系统。
当汽车载荷、行驶速度、路面情况等行驶条件发生变化时,主动悬架系统能自动调整悬架的刚度,从而同时满足汽车的行驶平顺性、操纵稳定性等各方面的要求。
它在下述几方面使汽车性能得到改善。
a. 悬架刚度可以设计得很小,使车身具有较低的固有频率,以保证正常行驶时的乘坐舒适性。
由于刚度可调,使汽车转弯出现的车身侧倾、制动、加速等引起车身的纵向摆动等得到解决。
b. 采用主动悬架系统时,因不必兼顾正常行驶时汽车的舒适性,可将汽车抗侧倾、抗纵摆的刚度设计得较大,因而提高了汽车的操纵稳定性,使汽车的行驶安全性得以提高。
c. 汽车载荷变化时,主动悬架系统能自动维持车身高度不变,汽车即使在凹凸不平的道路上行驶也可保持车身平稳。
d. 普通汽车在制动时车头向下俯冲,由于前后轴载荷发生变化,使后轮与地面的附着条件恶化,延长了制动过程。