感应电机自适应滑模增益控制器的设计
一种用于无速度传感器异步电机控制的自适应滑模观测器

s e d o s r e a e h u p t f m h e o d c re t b e e n h o o u b e e s i n u s a d g n r p e b e r tk s te o t u s r v o te s c n u n s r ra d t er trf x o s r ra t i p t n e e - o v l v s ae h si td r tr s e d a h u p t h si td s e d i t e e a k t h e o d c re t b e e n ts te e t mae o o p e st eo t u .T e e t mae p e s h n fd b c o t e s c n u r n s r ra d o v
Abs r c :An a a tv ldig mo eob e v rfridu to t rs n o l ss e o to ssud e whih wa ta t d p ie si n — d s r e o n c in mo o e s res pe d c nr lwa t i d, c s c mp e ft si n — o e u r n bs r e s,a ld n — de r tr fux o e e d s e o s r e . The r tr o os d o wo ldig m d c re to e r v si i g mo oo l bs r ran pe d b e r v v oo
摘 要 : 研究 了一种用于异步 电机 控制的 白适应滑模观测器 。该观测器 由两 个滑模电流观 测器 、 子磁 转 链 观测 器和速度估计部分组成 。转子磁链观测器 以两 个电流观测器和速度观测器 的输 出作 为输入 , 估计转速 反馈到第二个 电流观 测器 和转子磁链观测器 。采用 Lau o yp nv理论 和 Pp v超稳定性 理论对该方 法的稳定 性 oo 进行验证 。该观 测器 具有设计 新颖 、 对参数变 化具 有很强的鲁棒性等特点 。通过 Sm l k仿真验证 了该 观测 i ui n
基于自适应滑模控制的机电系统建模和优化设计
基于自适应滑模控制的机电系统建模和优化设计机电系统是由机械元件和电气元件构成的复杂系统,其稳定性和性能的改善一直是工程师们关注的重点。
自适应滑模控制是一种用于解决机电系统非线性和不确定性问题的有效控制方法。
本文将基于自适应滑模控制的机电系统进行建模和优化设计的相关内容进行介绍。
首先,我们需要对机电系统进行建模。
建模是设计控制器的基础,可以将系统的动态行为转化为数学方程。
对于机电系统,我们可以利用力学和电气原理进行建模。
可以使用拉格朗日方法或牛顿第二定律来描述机械部分的运动方程,利用基尔霍夫电流定律或基尔霍夫电压定律描述电气部分的电路方程。
建模的目的是获得系统的状态空间方程或传递函数,以便进行控制设计。
接下来,我们可以使用自适应滑模控制方法对机电系统进行控制设计。
自适应滑模控制是一种结合滑模控制和自适应控制的方法,通过滑模面的设计来实现系统的稳定性和鲁棒性。
为了提高系统的性能,可以采用自适应增益技术和自适应滑模面设计方法。
自适应增益技术可以根据系统的状态和参数变化来调整控制器的增益,以提高系统的动态响应和鲁棒性;自适应滑模面设计方法可以根据系统的非线性特性和不确定性来设计滑模面,以实现系统的稳定性和鲁棒性。
在进行优化设计时,我们可以应用先进的优化算法来获得满足性能指标的最优控制参数。
常用的优化算法包括遗传算法、粒子群算法、模拟退火算法等。
优化设计的目标是寻找最优的控制参数,以减小系统的误差、提高系统的稳定性和鲁棒性,并满足设计要求。
在实际应用中,我们还需要考虑到机电系统的实时性和可实现性。
因此,需要对控制器进行硬件的实现和相关的实时控制算法开发。
在选择硬件平台时,需要考虑系统的计算能力、接口类型和实时性能等因素。
总结起来,基于自适应滑模控制的机电系统建模和优化设计是一个复杂而关键的工作。
通过合适的建模方法和控制设计技术,可以获得满足性能要求的控制方案。
在优化设计中,通过应用先进的优化算法和实时控制策略,可以获得最优的控制参数,并保证系统的实时性和可实现性。
永磁同步电机神经网络自适应滑模控制器设计
永磁同步电机神经网络自适应滑模控制器设计发表时间:2019-06-10T10:58:58.827Z 来源:《电力设备》2019年第2期作者:赵豫凤[导读] 摘要:建立矢量控制永磁同步电动机调速控制系统,可以有效加强控制系统的可靠性与适应性,提高系统的调速性能。
(桂林星辰科技股份有限公司广西桂林 541004)摘要:建立矢量控制永磁同步电动机调速控制系统,可以有效加强控制系统的可靠性与适应性,提高系统的调速性能。
在矢量控制永磁同步电动机调速控制系统中采用最新型的空间电压矢量脉宽调制技术,可以使工作中的逆变器得到控制,并使电子磁链矢量的运动轨迹随着电动机的运行逐渐靠近圆形的磁链轨迹。
本文主要对永磁同步电动机调速控制系统的设计进行分析研究。
关键词:永磁同步电动机;调速控制系统;设计前言:可调速的永磁同步电动机是一种新型的同步电动机,所应用的范围十分广泛,具有体积小、损耗低以及效率高等优势。
现阶段永磁同步电机得到了深入的应用,相关人员开始注重对永磁同步电机调速控制系统的探究。
空间电压矢量控制技术在交流电动机变频调速中得到了十分普及的应用,可以在一定程度上满足工业的发展。
1 空间电压矢量脉宽调制技术空间电压矢量脉宽调制技术通常运用于磁链跟踪控制中。
因此,也可以称为磁链跟踪控制技术。
空间电压矢量脉宽调制技术是利用逆变器输出具有交替作用的多种基本空间电压矢量,使传输出的电压矢量进行合成,最终形成圆形磁链轨迹。
同一个周期内的逆变器,若在六个有基础的基本电压空间矢量都进行一次输入,定子磁链矢量会直接出现六边形的运动轨迹,从而阻碍了圆形磁链轨迹的出现。
为了可以在永磁同步电动机获取圆形磁链轨迹,可以借助多种基本空间电压矢量进行组合,从中获取具有不同幅值的空间电压矢量,使逆变器的使用状态逐渐增加。
永磁同步电机(PMSM)具有结构简单、运行可靠、损耗少、效率高、电机尺寸灵活多样等优点,广泛应用于各种场合,因而对其控制性能的要求越来越高。
基于滑模控制的模型参考自适应异步电机无速度传感器控制
= +
s =
I d ( >0 t k )
() 7
式中:
,
帕 —— 和 卢轴 的转 子磁链 ;
— —
这样 , 滑 动 面 S=0时 , 差 信 号 逐 渐 衰 减 到 在 误
零 。 当系统 到达滑 动 面 , : 即
的输 出相 比较 , 断调 节 后 者 , 到两 个 模 型 的输 出 不 直
相 等 。在 MR S转 速 辨 识 方 法 中 , 不 含有 真 实 转 A 将 速 的磁链 方 程 ( ) ( ) 为 参 考 模 型 ( 子 磁 链 电 1 ,2 作 转 压模 型 ) 含 有待 辨识 转 速 的磁 链 方 程 ( ) ( ) 为 , 3 ,4 作
() 9
—
定转 子 互感 ;
一
滑模控 制器 规则 可选 用李 雅普诺 夫 函数 , 即
1
:
=
苊— 漏 系 ; — 磁 数
— —
5
( 0 1)
=
,
转 子 时 间常数 。
根据李 雅普 诺夫 意义 下 的稳 定 性 定理 如 果 为
负 定 的 , 可 确 保 状 态 轨 迹 在 有 限 时 间 内 达 到 切 换 就 曲 面 S而 到 达 后 , 可 沿 轨 线 滑 动 并 收 敛 到 原 点 , , 就 对
如下 转速 估计关 系 式 :
1 模 型 参 考 自适 应 系统 ( MRA ) S
图 1 示 模 型 参 考 自适 应 系 统 ( A ) 基 本 所 MR S 的 中:
盘( 等 , +) =
= 一 A
( 5 )
() 6
基于自适应滑模观测的无速度传感器感应电机间接磁场定向滑模控制
载抗扰 性进行 了研 究并 得 出结论 。
1 间接 磁 场 定 向控 制 的 感 应 电 机 数 学 模 型
假设 磁路 为线 性 并 忽 略 铁 耗 时 ,三 相 感 应 电机在 以 同步转 速旋转 的 由 坐标 系下 的数学模 型 为 :
量观测 和参 数 辨识 的不 同方 法 :如 扩 展 卡 尔 曼 滤 波 器法 ( K ) ,模 型参 考 自适 应 法 ( A ) EF MR S ,滑 模 观 测器 法 ( MO) S 以及新 型模 糊 逻辑 神 经 网络 观测 器法 等H 叫 。近些 年 来 ,一 批 国 内外 的 研 究 学 者 针 对 电 气传动 系统 滑模控 制和 滑模 观测竞 相 开展 了研 究 ,
( 肥 工 业 大 学 电 气 与 自动 化 工 程 学 院 ,合 肥 合 2 00 ) 30 9
摘
要 :针对传统感应电机无速度传感器控制系统中参数 变化 和负载扰 动对 系统运行性 能 的影 响 ,该 文将滑模控制
与 自适应滑模观测器相结合 ,构成 了感应 电机无速度 传感器 的双 滑模控制系 统 ,并 建立 了该 系统的 SMU I K仿真 I LN
.
i g mo e o s r e n ld n d o to os le t e ifu n e o pe ain p roma e i o n d b e v ra d si i g mo e c n r lt ov h n e c fo r to e r nc n c mmo n u ・ l f n i d c to t rs ns re sc n r ls se c u e y v rain o a a tra xe n ll a itr a c i n moo e o ls o to y tm a s d b a ito fp r mee nd e t r a o d d su b n e,b ita ul n s se smu ain mo e .S se smu ain e p rme t o e t a h l n d o to y tm t — y t m i lto d 1 y t m i lto x e i n sprv h tt e si g mo e c n r ls se wih a di d p ie si i g mo e o s r e a o riso e tr rbu t e s o o e s o n u c y a c r s o s a t ld n d b e v rh sprpete fb te o sn s ,n v rho ta d q ik d n mi e p n e v whe a a in o a a t ra xe n lla it r a c a p n n v r t fp r mee nd e t r a o d d su b n e h p e . i o Ke r y wo ds:i d c in moo ;s n o ls ;si i g mo o to ;a a t e si i g mo e o s r e n u t tr e s re s ld n de c n r l d p i ld n d b e r o v v
基于神经滑模变自抗扰控制的感应电机变频调速系统设计

基于神经滑模变自抗扰控制的感应电机变频调速系统设计感应电机是工业生产中常用的一种电机,它具有结构简单、维护方便、使用寿命长的特点,因此被广泛应用于各种工业设备中。
在传统的感应电机调速系统中,通常会采用变频器来控制电机的转速,以满足工艺要求。
由于感应电机的非线性、时变特性以及外界扰动等因素的影响,使得传统的变频调速系统存在一定的控制精度和稳定性方面的问题。
为了解决这些问题,本文将基于神经滑模变自抗扰控制方法设计感应电机变频调速系统,以提高系统的控制性能和稳定性。
一、感应电机变频调速系统的原理1. 感应电机感应电机是一种常见的交流电机,它由定子和转子两部分组成。
当定子上通以交流电流时,会在转子上感应出电动势,从而产生转矩,使得电机转动。
感应电机具有结构简单、运行可靠、使用寿命长等优点,因此在工业生产中得到广泛应用。
二、基于神经滑模变自抗扰控制的感应电机变频调速系统设计为了提高感应电机的调速系统的控制性能和稳定性,本文将采用神经滑模变自抗扰控制方法进行系统设计。
神经滑模变自抗扰控制是一种综合利用神经网络和滑模控制技术的先进控制方法,它具有良好的自适应性和鲁棒性,能够有效克服感应电机系统中的非线性、时变特性和外界干扰。
1. 神经网络模型利用神经网络建立感应电机的数学模型,通过神经网络对电机系统进行建模和辨识,得到系统的非线性动态特性。
然后,利用神经网络的学习能力和自适应性,对系统的非线性特性进行补偿和修正,以提高系统的控制精度和稳定性。
2. 滑模控制策略引入滑模控制策略,利用滑模控制器对感应电机系统进行控制。
滑模控制器能够通过引入滑模面来抑制系统的非线性和时变特性,实现对系统的快速跟踪和鲁棒稳定控制。
滑模控制器对系统的干扰具有很强的抑制能力,能够有效克服外界扰动的影响。
三、系统仿真与实验验证为了验证所设计的基于神经滑模变自抗扰控制的感应电机变频调速系统的性能,进行了系统的仿真和实验验证。
通过对感应电机系统进行建模和仿真分析,验证了所设计的控制方法对系统的控制性能和稳定性的改善效果。
基于最大转矩电流比的永磁同步电机自适应滑模控制

基于最大转矩电流比的永磁同步电机自适应滑模控制葛晨阳$孙新程!闫天一#胡继磊#(1.国网江苏省电力有限公司连云港市赣榆区供电分公司,江苏连云港222100;2.国网江苏省电力有限公司高邮市供电分公司,江苏扬州225600)摘要:针对永磁同步电机伺服系统在外部扰动力矩下的速度跟踪控制问题,提出了一种基于最大转矩电流比的自适应滑 模控制器。
为了简化计算,采用牛顿!最大转矩电流比对电机交直轴电流的分配,在基础上改进了自适应滑模速度控制器。
为减少滑模控制中的抖振,设计了自适应滑模切换 ° 对比 ,提控制 有效提升了系统的动 应能力扰动力。
关键词: 永磁同步电机;最大转矩电流比;自适应滑模控制;抗扰动能力0引言内置式永磁同步电机(Interior Permanent Magnet Synchronous Motor ,IPMSM )因其体积小、结构简单、功率度高等优点, 大应用于 电动、出转矩大、动 应 速 的°,统的永磁同步电机大采用的!>=0的控制,控制 于,适于 永磁同步电机(Surface Permanent Magnet Synchronous Motor ,SPMSM)。
于IPMSM 转的 ,采用!<=0的控制方提高电机 , 电流用, 提高了系 统 。
最大转矩电流比(Maximum Torque Per Ampere ,MTPA ) 的控制分利用IPMS M 转子磁路的对称性所的磁阻转矩,提高电机 度。
电磁转矩"e电流!>、!q在的 ,了计算难度。
文献[1] 统的查表法计算不同电磁转矩"e对应的!>、!q 的值,但是这种大的数据 空;文献⑵提出了基于IPMSM 的非线性磁链模型对d 轴磁链 电流、g 轴磁链和电流分别拟合,得到相应的转矩程和 MTPA 条件,这种对际系统的运算能力求较高。
滑动模态控制(Sliding Mode Control ,SMC )具有快速 响应、对参数扰动变化敏感、参数设计无须系统在线辨识等优点,被大量应用于非线性系统的控制中。
自适应控制与滑模

自适应控制与滑模自适应控制和滑模控制是现代控制理论中的两个重要概念。
它们在工程控制领域中具有广泛的应用,并在不同的系统中展现出了出色的性能。
本文将介绍自适应控制和滑模控制的基本原理和应用,探讨它们之间的联系与区别,并通过实例来说明它们在不同实际问题中的应用。
自适应控制是一种根据被控对象的特性自动调整控制系统参数的控制方法。
它通过实时测量被控对象的反馈信号,并将其与期望输出进行比较,利用自适应算法来调整控制器的参数,以实现对被控对象动态特性的准确描述和控制。
自适应控制的关键是设计合适的自适应算法,以确保对被控对象的实时适应性和鲁棒性。
滑模控制是一种基于滑模面的控制方法,它通过引入滑模面使得被控对象的状态跟踪该滑模面上的轨迹,从而实现对被控对象的稳定控制。
滑模控制的核心思想是将系统状态引入到滑模面上,使得滑模面上的控制器能够以较小的误差实现系统的鲁棒稳定。
滑模控制特别适用于反馈不完全、存在参数不确定性和外部干扰的非线性系统。
自适应控制和滑模控制在某些方面存在相似之处。
首先,它们都是针对复杂系统和多变环境的控制方法,具有较强的适应性和鲁棒性。
其次,它们都需要借助控制器参数的调整来实现对被控对象的控制。
然而,它们的实现方式和调整方式存在一些明显的差异。
自适应控制通过实时测量被控对象的反馈信号,并进行参数的在线调整。
它利用自适应算法对系统进行建模和辨识,根据辨识结果来调整控制器的参数。
自适应控制的优势在于可以满足不同被控对象的需求,并且能够在系统动态变化时保持较好的控制效果。
然而,自适应控制也存在一些问题,如辨识过程中的噪声敏感性和通过自适应算法引入的控制器非线性等。
滑模控制则通过引入滑模面来实现对被控对象的控制。
滑模面是一个特定的超平面,被控对象的状态需要跟踪该超平面上的轨迹。
滑模控制通过设计滑模面的形状和控制律的参数,使得滑模面上的控制器能够实现对被控对象的稳定控制。
滑模控制的优势在于对系统动态特性的描述非常简洁,控制器参数的调整也较为简单。
永磁同步电机滑模自适应控制
ABS TRACT : I n t h e p r o c e s s o f p e r ma n e n t ma g n e t s y n c h r o n o u s mo t o r s p e e d c o n t r o l ,e x t e r n a l i n t e r f e r e n c e s , p a r a me t e r c h a n g e s a n d i mp r e c i s e s y s t e m mo d e l s h a v e g r e a t i mp a c t s o n c o n t r o l p r e c i s i o n .I n t h i s p a p e r ,a d u a l l o o p c o n t r o l ,
c o n t r o l c a n b e w e a k e n e d .MAT L AB p l a t f o r m i s u s e d, s i mu l a t i o n r e s u l t s s h o w t h a t mo t o r s t a r t i n g s p e e d a n d c u re n t 0 一 v e r s h o o t a r e s ma l l i n s l i d i n g mo d e a d a p t i v e c o n t r o l ,a n d s t e a d y—s t a t e o p e r a t i o n c a n b e a c h i e v e d q u i c k l y ;wh e n d i s — t u r b a n c e i s a d d e d t o t h e s y s t e m ,s p e e d a n d c u r r e n t h a v e s ma l l l f u c t u a t i o n,a n d s t e a d y—s t a t e o p e r a t i o n c a n b e q u i c k —
感应电机模糊滑模控制器的新型设计方法
Absr t: n v lf zy ldig m o e s e d c n rl c e o nd ci n m oo s p o o e n o d r t tac A o e u z si n d p e o to s h me f r i u to t r i r p s d i r e o c u t r c h fe t o tb l y a d p e ii n i to u e y t e v rai n o tt r rssa c n oo o n e a tt e ef c n sa ii n r cso n r d c d b h a ito fsa o e it n e a d r t r t t e c n t n n i d c in m oo e t rc n r ls se . A ld n d p e o to lra d a r tr t e i o sa ti n u t trv co o to y tm m o si i g mo e s e d c n r l n o o i e m c n tn bs r e r sg e y u ig t e m o e fi d c in mo o . Co tn o s r a —i e t i f o sa to e v r we e de in d b sn h d lo n u to tr n i u u e ltm unng o s t h n u c in wa e l e i u z o to t o o r d c h h t rn ft e sg u ci n Th wi i g f n to sr a i d v af zy c nr lme h d t e u et e c at i g o h in f n to , c z e e
基于自适应滑模控制的高性能电机驱动系统设计
基于自适应滑模控制的高性能电机驱动系统设计高性能电机驱动系统设计基于自适应滑模控制(Adaptive Sliding Mode Control,ASMC)技术,是一种应用于电机驱动系统的先进控制方法。
该方法通过引入自适应技术,可以根据实际系统的参数和工作条件变化来调整控制策略,提高电机驱动系统的性能和鲁棒性。
在设计高性能电机驱动系统时,首先需要确定电机的数学模型和系统需求。
然后,可以利用自适应滑模控制方法进行系统的控制器设计。
自适应滑模控制是一种常用的非线性控制方法,具有较好的鲁棒性和适应性。
它通过引入滑模面以及定义滑模面上的滑模控制律来实现系统的稳定性和跟踪性能。
自适应技术可以用来估计系统的未知参数,并将参数估计误差纳入控制器设计中,使控制器能够自适应地根据估计误差来调整控制策略。
在自适应滑模控制器设计中,一般包括滑模面的选择、滑模控制律的设计以及参数估计器的设计。
滑模面的选择应该根据系统的要求来确定,一般需要通过系统模型的仿真和实验验证来选择合适的滑模面。
滑模控制律的设计可以采用各种方法,如比例-积分-微分控制(PID)、模糊控制等,并根据实际应用情况来选择合适的方法。
参数估计器的设计可以基于最小二乘法、滤波器设计等方法,用来估计系统的未知参数。
在实际应用中,高性能电机驱动系统设计基于自适应滑模控制的控制器需要进行仿真和实验验证。
通过仿真可以评估控制系统的性能和鲁棒性,并调整控制参数以满足系统需求。
实验验证可以验证控制器在实际系统中的有效性和可行性。
尽管基于自适应滑模控制的高性能电机驱动系统设计在提高系统性能和鲁棒性方面具有许多优点,但是也存在一些挑战和问题。
例如,参数估计误差的存在可能会对系统的鲁棒性和性能产生影响,需要通过合适的参数估计器设计来降低估计误差。
此外,系统的非线性和时变性也可能会对控制效果产生一定的影响,需要采取相应的措施来解决这些问题。
总之,基于自适应滑模控制的高性能电机驱动系统设计是一个较为先进和复杂的控制方法。
基于自适应滑模控制的变刚度伺服系统控制器设计
Application 应用 技术 案例 产品64 │ 今日制造与升级基于自适应滑模控制的变刚度伺服系统控制器设计梁青祥龙,王喆(中国飞机强度研究所,陕西西安 710065)[摘 要]针对变弹性刚度伺服跟踪控制问题,以角度伺服跟踪为例,提出了一种自适应滑模控制算法。
并进行了与PID 控制、滑模控制策略的对比仿真,仿真结果显示,基于自适应滑模控制算法的控制器能更好的解决变弹性刚度条件下的伺服跟踪精度问题,并具有较强的鲁棒性。
[关键词]变弹性;伺服跟踪;自适应;滑模 [中图分类号]TP13 [文献标志码]B服系统常被称为随动系统,属于反馈控制系统,对其的要求是能精确、快速地复现控制过程,包括被控对象的位置、方位、状态等。
伺服系统是一个多回路系统,通过位置、速率等反馈回路调节驱动装置产生的力矩,最终能够精确快速的跟踪输入的位移信息。
利用传递函数方法研究变参数伺服系统一直是伺服系统研究的难点。
弹性刚度的变化引起系统参数的变化,从而引起系统动静态特性的变化,这给系统设计和调整带来困难【1】。
本文针对系统外部有界扰动以及弹性变刚度情形,设计了一种自适应滑模控制器,使伺服系统具有较强的鲁棒性以及较好的变刚度自适应能力,实现了伺服系统的高动态、高精度跟踪性能。
1 变刚度伺服系统伺服系统作为一个反馈控制系统,要求能够精确、快速地复现某一控制过程,包括被控对象的位置、方位、状态等。
伺服系统属于典型的反馈控制系统。
伺服系统通常是由多个回路构成,通过从内回路到外回路依次调节电机电流、速度、位移,它的一般结构如图1所示。
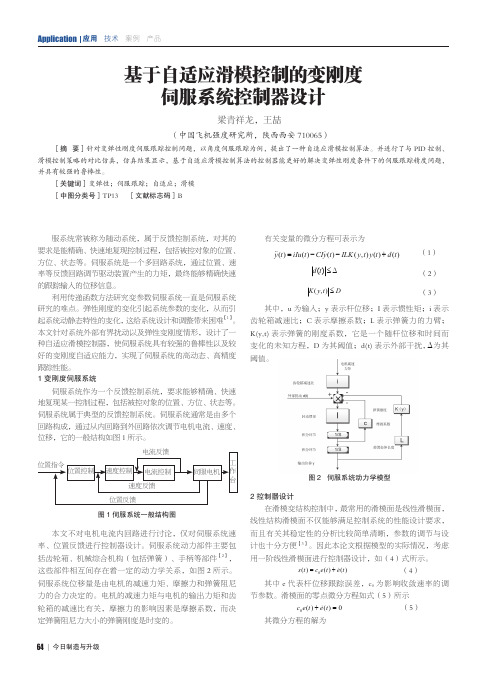
有关变量的微分方程可表示为图1伺服系统一般结构图本文不对电机电流内回路进行讨论,仅对伺服系统速率、位置反馈进行控制器设计。
伺服系统动力部件主要包括齿轮箱、机械综合机构(包括弹簧)、手柄等部件【2】,这些部件相互间存在着一定的动力学关系,如图2所示。
伺服系统位移量是由电机的减速力矩、摩擦力和弹簧阻尼力的合力决定的。
一种适用于感应电机的免疫滑模控制方法[发明专利]
![一种适用于感应电机的免疫滑模控制方法[发明专利]](https://img.taocdn.com/s3/m/21b7f7e50740be1e640e9a9b.png)
专利名称:一种适用于感应电机的免疫滑模控制方法
专利类型:发明专利
发明人:王喜乐,李东,李岩,牛剑博,张利娟,赵豆,高永军,李宝恩
申请号:CN201811640610.2
申请日:20181229
公开号:CN109660162A
公开日:
20190419
专利内容由知识产权出版社提供
摘要:本发明公开了一种适用于感应电机的免疫滑模控制方法,该方法是在经典的矢量控制系统的基础上,将转速外环的PI控制器采用免疫滑模控制器来代替,免疫滑模控制器的输入为给定转速w*与电机的实际反馈转速w之差,输出为iq*。
本发明通过采用免疫控制的思想对滑模控制器中的滑模面趋近速度进行实时调节,有效的减小了传统滑模控制中的抖振问题,提高了电机控制系统的快速性及鲁棒性。
具有广阔的工业应用前景。
申请人:西安中车永电电气有限公司
地址:710016 陕西省西安市经开区凤城十二路中国中车永济电机
国籍:CN
代理机构:西安新动力知识产权代理事务所(普通合伙)
代理人:刘强
更多信息请下载全文后查看。
基于神经滑模变自抗扰控制的感应电机变频调速系统设计
基于神经滑模变自抗扰控制的感应电机变频调速系统设计1. 引言1.1 研究背景感应电机是工业中广泛应用的一种电动机,其用途涵盖了各个领域。
感应电机的调速系统设计是一个重要的研究课题,对提高电机的性能和效率有着重要意义。
随着科技的不断进步,传统的感应电机调速系统设计已经不能满足当今工业发展的需求。
传统的控制方法在面对电机系统的非线性、时变和扰动等问题时效果不佳,因此需要引入新的控制方法来提高系统的稳定性和性能。
神经滑模变自抗扰控制是一种结合了神经网络、滑模控制和自抗扰控制的先进控制方法,可以有效克服感应电机系统的不确定性和扰动。
通过神经网络的学习能力和滑模控制的快速响应特性,可以实现对感应电机的精确控制。
研究基于神经滑模变自抗扰控制的感应电机变频调速系统设计具有重要的实际意义和理论意义。
本文将对这一领域展开深入探讨,并通过实验结果分析,总结本研究的创新点,并展望未来的研究方向。
1.2 问题提出本文主要研究基于神经滑模变自抗扰控制的感应电机变频调速系统设计,针对现有调速系统在实际应用中存在的问题进行深入分析和探讨。
感应电机作为工业中最常见的驱动装置之一,在生产过程中起着至关重要的作用。
传统的调速系统在面对扰动和非线性因素时常常表现不稳定,影响了系统的性能和效率。
如何提高感应电机调速系统的稳定性和鲁棒性成为当前研究的重点之一。
问题一:传统调速系统在面对扰动和非线性因素时易出现不稳定现象,导致系统性能下降。
问题二:传统调速系统对参数变化敏感,调节过程繁琐,降低了系统的实用性和可靠性。
问题三:传统调速系统缺乏足够的智能化控制手段,无法适应复杂工况下的调速需求。
针对以上问题,本文将采用基于神经滑模变自抗扰控制的方法,结合神经网络、滑模控制和自抗扰控制的优势,设计出更加稳定、鲁棒和智能化的感应电机变频调速系统,从而提高系统的性能和效率。
1.3 研究意义感应电机是电力传动中最常见的电机类型之一,在工业生产中被广泛应用于各种机械设备中。
电机滑膜增益值
电机滑膜增益值
电机滑膜增益值是指电机控制系统中用来设计电机滑模控制器的参数之一。
滑模控制器是一种非线性控制器,它通过引入一个滑模面来使系统在滑模面上运动。
滑膜增益值是控制滑模面运动速度和稳定性的关键参数。
滑膜增益值通常用 K 来表示,它决定了滑模面的斜率。
增加滑膜增益值可以加快系统响应速度,但可能会增加系统震荡和噪声。
降低滑膜增益值可以增加系统稳定性,但可能会影响系统的动态性能。
在实际应用中,选择合适的滑膜增益值需要考虑系统的特性、控制要求和稳定性等因素。
通常可以通过试验、仿真和调整来确定最佳的滑膜增益值。
动力系统控制中的自适应滑模方法研究

动力系统控制中的自适应滑模方法研究摘要:动力系统控制是现代工程领域的重要研究方向之一。
自适应滑模方法是动力系统控制中的一种有效方法,能够克服系统参数变化、模型不确定性和外部干扰等问题。
本文将对自适应滑模方法在动力系统控制中的研究进行综述,介绍其基本原理、设计方法和应用场景,并分析其优点和局限性,为进一步研究提供参考。
1. 引言动力系统控制是指对具有一定动态特性的系统进行控制和调节,以实现预期性能要求。
随着科技的进步和工业自动化需求的增加,控制系统的设计和优化变得越来越重要。
自适应滑模控制作为一种有力的控制方法,被广泛应用于各个领域,特别是在动力系统控制中具有重要的研究价值。
2. 自适应滑模控制的基本原理自适应滑模控制的基本原理是通过引入一个可调节的滑模面,使系统的状态能够滑动到滑模面上,从而实现对系统的控制。
自适应滑模控制可以通过适应性参数调整来克服系统参数变化和模型不确定性带来的影响,同时能够抑制外部干扰的影响,提高系统的鲁棒性和追踪性能。
3. 自适应滑模控制的设计方法自适应滑模控制的设计方法主要包括滑模面的选择、滑模参数的调整和自适应律的设计。
滑模面的选择需要根据系统的特性和控制要求来确定,可以采用线性或非线性的方式。
滑模参数的调整可以通过自适应律进行实现,自适应律可以根据误差和误差变化率来调整滑模参数。
自适应滑模控制的设计方法需要考虑系统的动态特性和控制要求,确保系统能够稳定运行。
4. 自适应滑模控制在动力系统控制中的应用自适应滑模控制在动力系统控制中有广泛的应用领域,例如汽车发动机控制、机器人控制、电力系统控制等。
在汽车发动机控制中,自适应滑模控制可以实现对发动机的稳定性、燃料效率和排放性能的优化。
在机器人控制中,自适应滑模控制可以实现对机器人运动轨迹的精确控制和避障控制。
在电力系统控制中,自适应滑模控制可以实现对电网的频率和电压的稳定控制。
这些应用场景都展示了自适应滑模控制在动力系统控制中的巨大潜力。
感应电机自适应滑模增益控制器的设计
感应电机自适应滑模增益控制器的设计崔春艳;李奎;李兵;付超;郭佳【摘要】Aiming at the problem of the limit value of various disturbance signals not only being difficult to obtain but also needing a large amountof calculation in the traditional sliding mode control system , a novel adaptive sliding mode gain vector control technology of induction motoris proposed , in order to control the speed of induction motor accurately and fast. This method does not require a large amount of calculation and weakens the dependence for the various disturbance signals boundary.The system realizes the automatic adjustment of the gain coefficient of sliding mode according to the motor parameters and load torque disturbance. By using Lyapunov stability theorem, the control system stability is proved. The simulation results of Matlab Simulink show that variable structure control method about adaptive sliding mode gain according motor parameters and load torque uncertainties has good speed performance, small amount of calculation and good robustness.%针对传统滑模控制系统中扰动信号的临界值难获得且计算量大的问题,提出了一种新型的自适应滑模增益的感应电机矢量控制技术,以便对感应电机进行快速准确调速。
永磁同步电机神经网络自适应滑模控制器设计

假设电机定子三相绕组采用星型连接, 在空间 上互差 120b 电角度 , 如果三相绕组相电压瞬时值分 别为 u a、 ub、 u c, 可以将瞬时电压空间矢量表示为 Us =
。逄海萍等
[ 11]
针对永磁同步电机交流伺服
[ 12]
系统设计了基于 Sugeno 型模糊推理的滑模模糊位 置控制器。朱玉川等 提出并设计了串级复合滑 模变结构控制器。其中速度环通过增加积分环节来 消除滑模控制的力矩抖动 , 位置环通过复合滑模控 制的设计来消除稳态滑模控制的抖振。 Chen 采 用神经网络实时调整滑模趋近律的系数, 同时在滑 模控制设计中, 采用双曲正切函数代替饱和函数实 现边界层减小抖振。 本文提出一种神经网络自适应滑模控制器设计 PM S M 位置控制器, 采用 RBF 神经网络自适应调节 滑模控制器的切换控制项增益。目的是为了减小电 机运行过程中的抖振和系统参数变化和外部干扰的 影响。
3基于svpwm的pmsm矢量控制本文所采用的永磁同步电机伺服控制系统框图如图2所示系统采用位置速度和电流3闭环控制模式光电编码器同时作为位置和速度传感器量到实际位置信号与给定指令与速度反馈信号比较其差值通过速度环调节器得到与实际反馈值idiq比较后通过电流环调节器得到定子电压在dq轴的分量经过park反变换得到静止两相坐标系上的分量通过电压矢量脉宽调制svpwm控制方法产生三相桥式的脉冲控制信号最后逆变器输出三相电流控制pmsm旋转
#
( 10 ) 设计滑模面为 s = ce + e,
# # # & s= ce + & e = f + gu + d - H d + ce。 #
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( 1 . 河北工业大学 电磁场 与电器可靠性省部共建重点实验室 , 天津 院, 河北 邯郸 摘 0 5 6 0 3 8 ) 3 0 0 1 3 0 ; 2 . 河北工程 大学 信息与电气工程学
要: 针对 传统 滑模控制 系统 中扰动信号的临界 值难获得且计算量 大的问题 , 提 出了一种新型的 自适应 滑模增益
第3 2卷
第 6期
天 津 工 业 大 学 学 报
J oURNAL oF TI ANJ I N POL YTECHNI C UNⅣ ERS I TY
Vo 1 2月
De c e mb e r 2 0 1 3
感应 电机 自适 应 滑模 增 益控 制器 的 设计
关键词 : 感 应 电机 ; 自适应 滑模 增 益 ; 矢 量控 制 ; 滑 模 变结 构
中图分 类号 : T M3 4 6 . 2
文献标 志码 :A
文章编号 :1 6 7 1 — 0 2 4 X ( 2 0 1 3 ) 0 6 — 0 0 5 5 — 0 4
De s i g n o f a da p t i v e s l i di ng mo de g a i n c o nt r o l l e r o f i n du c t i o n m ot o r
o f T e c h n o l o g y ,T i a n j i n 3 0 0 1 3 0 ,C h i n a ;2 .S c h o o l o f I n f o r m a t i o n a n d E l e c t i r c E n g i n e e i r n g ,H e b e i U n i v e r s i t y o f
En g i n e e r i n g , Ha n d a n 0 5 6 0 3 8,C h i n a )
Ab s t r a c t :Ai mi n g a t t h e p r o b l e m o f t h e l i mi t v a l u e o f v a i r o u s d i s t u r b a n c e s i g n a l s n o t o n l y b e i n g d i f f i c u l t t o o b t a i n b u t a l s o n e e d i n g a l a r g e a mo u n t o f c a l c u l a t i o n i n t h e t r a d i t i o n a l s l i d i n g mo d e c o n t r o l s y s t e m ,a n o v e l a d a p t i v e s l i d i n g mo d e g a i n v e c t o r c o n t r o l t e c h n o l o g y o f i n d u c t i o n mo t o r i s p r o p o s e d,i n o r d e r t o c o n t r o l t h e s p e e d o f i n d u c t i o n mo t o r a c c u r a t e l y a n d f a s t .T h i s me t h o d d o e s n o t r e q u i r e a l a r g e a mo u n t o f c a l c u l a t i o n a n d w e a k e n s t h e
C UI C h u n — y a n , 一 ,L I K u i , L I B i n g 2 ,F U C h a o ,G UO J i a
( 1 . P r o v i n c e - Mi n i s t r y J o i n t Ke y L a b o r a t o y r o f El e c t r o ma g n e t i c F i e l d a n d E l e c t i r c a l Ap p a r a t u s Re l i a b i l i t y ,He b e i Un i v e r s i t y
的感应电机 矢量控制技术 , 以便 对感应电机进行快速准确调速. 这种方法不需要 大量的计算 , 消弱 了对 于各 种扰动信 号边界的依赖 , 实现 了滑模增益随 系统 中的电机参数和 负载转矩的扰动而进行 自动调整 的 目的. 并 利 用李亚普诺 夫稳定定理 , 证 明了该调速控制 系统的稳 定性 . Ma 廿 a b S i m u l i n k仿真 结果表 明 : 自适应滑模增 益 的变结构控制方法对于电机参数和 负载转矩 的不确定性均能呈现很好 的调速性 能, 计 算量 小, 鲁棒性好.
d e p e n d e n c e f o r t h e v a r i o u s d i s t u r b a n c e s i g n a l s b o u n d a y. r T h e s y s t e m r e a l i z e s he t a u t o m a t i c a d j u s t m e n t o f he t g a i n