六足机器人设计
六足爬行机器人总体设计方案
本文旳设计为六足爬虫机器人,机器人以交流-直流开关电源作为动力源,单片机为控制元件,伺服电机为执行部件,机器人采用三足着地进行运动,通过单片机对伺服电机旳控制,机器人可以实现前进、后退等运动方式,三足着地运动方式保证了机器人可以平稳运行。
伺服电机具有力量大,扭矩大,体积小,重量轻等特点。
单片机产生20ms 旳PWM 波形,通过软件改写脉冲旳占空比,从而到达变化伺服电机角度旳目旳。
1 机器人运动分析1.1 六足爬虫式机器人运动方案比较方案一:六足爬虫式机器人旳每条腿都能单独完毕抬腿、前进、后退运动。
此方案旳特点:每条腿都能自由活动,每条腿都能单独进行二自由度旳运动。
每条腿旳灵活性好,更轻易进行仿生运动,六足爬虫机器人可以完毕除规定外旳诸多动作,运动旳视觉效果更好。
由于每条腿能单独完毕二自由度旳运动,因此每条腿上要安装两个舵机,舵机使用数量大,舵机旳安装难度加大,机械构造部分旳制作相对复杂,又由于每个舵机都要有单独旳信号控制,电路控制部分变得复杂了,控制程序也对应旳变得复杂。
方案二:六足爬虫式机器人采用三腿为一组旳运动模式,且同一侧旳前腿、后腿旳前后转动由同一侧旳中腿进行驱动。
采用三腿为一组(一侧旳前足、后足与另一侧旳中足为一组)旳运动方式,各条腿可以协调旳进行运动,机器人旳运动相对平稳。
此方案特点:相比上述方案,个腿可以协调运动,在满足运动规定旳状况下,舵机使用数量少,节省成本。
机器人运动平稳,控制、驱动部分都得到对应旳简化,控制简朴。
选择此方案,机器人还可进行横向运动。
两方案相比,选择方案二更合适。
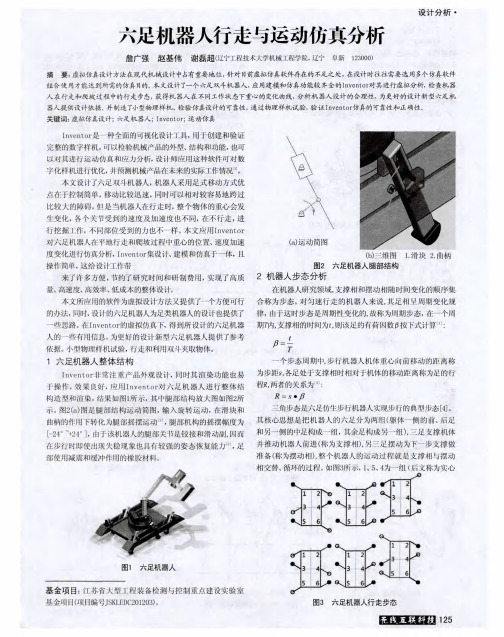
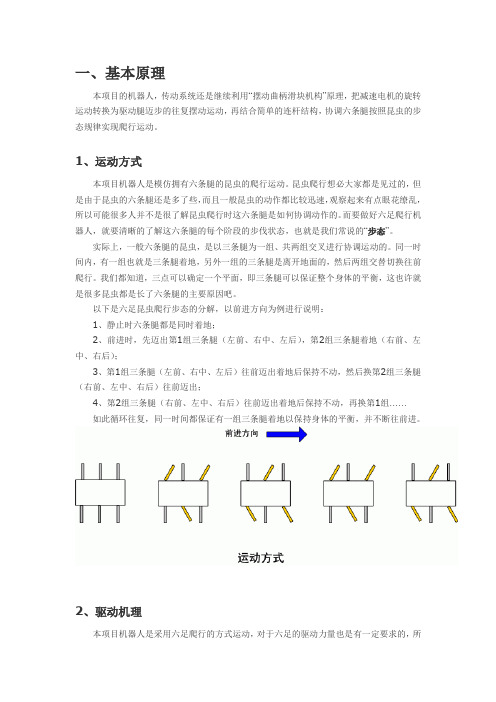
1.2 六足爬虫式机器人运动状态分析1.2.1 机器人运动步态分析六足爬虫式机器人旳行走是以三条腿为一组进行旳,即一侧旳前、后足与另一侧旳中足为一组。
这样就形成了一种三角形支架构造,当这三条腿放在地面并向后蹬时,此外三条腿即抬起向前准备轮换。
这种行走方式使六足爬虫式机器人运动相称稳定,任何时刻有三足着地,可以保持良好旳平衡,并可以随时随地停息下来,由于其重心总是落在三角支架之内。
六足爬虫机器人设计
六足爬虫机器人设计引言六足爬虫机器人是一种多足机器人,通过模仿昆虫和节肢动物的运动方式,能够在不平坦的地形上移动。
本文将介绍六足爬虫机器人的设计概念、机械结构、传感技术和控制系统。
设计概念六足爬虫机器人的设计概念是模仿昆虫的运动方式,并结合机器人技术,实现在复杂地形上的高效移动。
六足机器人的六条腿能够保持稳定的支撑面积,使机器人能够在不稳定的地面上保持平衡。
同时,六足爬虫机器人具有最小的接地面积,在狭窄的空间中也能自由运动。
机械结构六足爬虫机器人的机械结构主要由六条腿、身体和连接部件组成。
每条腿由多个关节连接,使机器人能够具备多自由度的运动能力。
身体部分包括能够容纳电源、传感器和控制器的空间。
连接部件起到连接腿和身体的作用,确保机器人的结构牢固。
机器人的材料选择需要兼顾强度和重量。
常用的材料包括轻质金属合金和碳纤维复合材料。
机器人的外形应减少空气阻力,提高机器人的运动效率。
传感技术六足爬虫机器人的传感技术包括视觉传感器、力传感器和惯性传感器。
视觉传感器能够感知周围环境,并获取地形信息,识别障碍物。
通过计算机视觉算法,机器人能够做出相应的决策,选择最优的路径。
力传感器可以测量机器人与地面的接触力,以克服地形的不平坦性。
力传感器还可以检测机器人是否受到外部碰撞,保护机器人和提供安全性。
惯性传感器用于测量机器人的加速度、角速度和姿态信息。
通过与其他传感器数据的融合,机器人可以实现高精度的姿态控制和运动轨迹规划。
控制系统六足爬虫机器人的控制系统由硬件控制单元和软件控制算法组成。
硬件控制单元包括微处理器、驱动电路和通信模块。
微处理器负责接收传感器数据、执行控制算法,并输出控制信号。
驱动电路用于驱动机器人的电动关节。
通信模块可与外部设备进行数据传输和远程控制。
软件控制算法包括路径规划、动力学模型和运动控制。
路径规划算法根据环境信息和目标位置,生成机器人的移动路径。
动力学模型可以模拟机器人的运动特性,并优化运动参数。
六足机器人原理

六足机器人原理今天咱们来聊聊超级酷的六足机器人的原理,这就像是探秘一个来自未来的小怪兽的秘密呢。
六足机器人啊,就像一个六条腿的小机灵鬼。
它的最基本原理其实和生物界里的昆虫有点像哦。
你看那些小昆虫,六条腿走来走去可灵活啦。
六足机器人也是想模仿这种灵活性。
从结构上来说,它有六条机械腿,这六条腿可是各有各的本事。
每一条腿都像是一个独立的小单元,它们都能做不同的动作。
这些腿和机器人的身体连接的地方就像是关节,就跟我们人的关节一样,可以弯曲、伸直。
这个关节的设计可重要啦,它能让腿做出各种各样的姿势。
比如说,有的关节是可以上下摆动的,就像我们膝盖一样,这样腿就能抬起来或者放下去;还有的关节能左右转动,就像我们的脚踝,能让机器人的脚调整方向。
那这些腿怎么动起来的呢?这就涉及到动力系统啦。
一般来说,会有电机来提供动力。
电机就像是小机器人的肌肉,它一转起来,就能带动腿的关节活动。
想象一下,电机就像一个勤劳的小工,不停地转动,然后把力量传递给关节,关节再带动腿做出各种动作。
不过呢,这个动力的传递可不是随随便便的,它需要一些特殊的装置,比如说齿轮或者皮带。
这些东西就像是小信使,把电机的力量准确无误地送到关节那里。
再说说六足机器人的平衡原理吧。
这可是它能稳稳站着和行走的关键呢。
你想啊,如果六条腿乱动,那机器人肯定就东倒西歪了。
它是怎么保持平衡的呢?其实它内部有一个很聪明的控制系统。
这个系统就像是机器人的小脑袋,它能时刻感知到每条腿的位置和受力情况。
如果有一条腿抬起来了,这个小脑袋就会迅速计算,然后让其他的腿调整位置和力量,来保持整个身体的平衡。
就像我们人走路的时候,当我们抬起一只脚,身体会自动调整重心到另外一只脚和两只脚上,机器人也是这样的道理。
而且哦,六足机器人的行走方式也是多种多样的。
它可以像昆虫那样慢慢地爬行,这时候每条腿的动作都很有规律,就像在跳一种很整齐的舞蹈。
也可以快速地移动,这个时候就需要更复杂的协调了。
仿生六足机器人的结构设计及运动分析

仿生六足机器人的结构设计及运动分析一、结构设计1.机体结构:仿生六足机器人的机体结构通常采用轻型材料如碳纤维和铝合金制作,以保证机器人整体重量轻,同时具备足够的强度和刚度。
机体一般采用箱型结构,保证机器人整体稳定。
2.足部结构:仿生六足机器人的足部结构是其中最重要的部分,直接关系到机器人的运动能力和适应性。
足部结构通常由刚性材料制成,具有良好的强度和刚度。
每个足部通常由三个关节驱动,分别是髋关节、膝关节和脚踝关节。
这些关节的设计对机器人的运动能力和足部适应性有着重要影响。
3.关节驱动方式:仿生六足机器人的关节驱动方式通常采用电机驱动和传动装置。
电机驱动可以提供足部的力和扭矩,使机器人能够进行各种运动,传动装置则用来将电机的运动传递到足部关节。
可以采用齿轮传动、连杆传动、带传动等方式,根据实际需求进行合理选择。
二、运动分析1.步态规划:步态规划是确定六足机器人各个足部的步态序列,以实现机器人的稳定行走。
常用的步态有三角步态、扭摆步态和螳臂步态等。
步态规划需要考虑机器人的稳定性和适应性,结合地面情况和环境要求进行合理选择。
2.动力学模拟:动力学模拟是对仿生六足机器人的运动进行分析和仿真,以优化机器人的运动能力和稳定性。
通过建立六足机器人的运动学和动力学模型,可以预测机器人的运动轨迹、步态设计和稳定性评估等。
动力学模拟可以帮助改善机器人的设计和控制策略。
3.控制策略:仿生六足机器人的控制策略采用了分布式控制和自适应控制的方法。
分布式控制通过将机器人的控制任务分配给多个子控制器,使得机器人具备较好的容错性和适应性。
自适应控制方法则通过对机器人的运动进行实时监测和反馈调整,使机器人能够自主学习和适应不同环境和任务。
综上所述,仿生六足机器人的结构设计和运动分析是实现机器人稳定行走和适应环境的重要环节。
正确的结构设计和合理的运动分析可以有效提高机器人的运动能力和稳定性,从而使机器人在实际应用中具备良好的适应性和操作性能。
六脚机器人总说明文档

一、 机械部分:
参考目前市面上的六脚仿真机器人, 本课题选用 5052 铝合金作为机器人身架的主要材 料,这样机器人既能满足强度要求,也能满足轻便性要求。同时,对外表进行烤漆处理,显 得厚实而稳重,富有质感。如图为机械结构的总三维图:
机器人整体上采用对称式结构,由六只脚和底架(身体)组成。每只脚有三个关节, 每个关节处采用舵机连接,所用舵机型号为:HS-645MG,可在固定平面内旋转 180°。 其中舵机 1 控制机器人脚前后摆动;舵机 2 控制机器人上下摆动;舵机 3 控制机器人 内外伸缩。三个舵机配合即可实现机器人腿部在三位平面内的摆动。
图 3.5 PSCI 控制界面 图中每个channel的进度条,可发现对应舵机会向相应方向发生一定度数的旋转。这可 用来进行舵机控制调试,从而获取舵机位置值,来书写步态。注意:图中数据在编入ARM程 序中时,应先除以2倍,才是实际数据,即图中的中心处1500对应实际的750。 更多功能可参照PARALLAX公司提供的Propeller Servo Controller USB说明文档。 当使用双块板时,其连接方式为:首先将主板的Serial In(两排,选上排)引出按高低 电平信号线要求插在主控制板(STM32板)上,其中红色线接5V电源,黑色线接地,白色线 接信号线,即PA9。然后将副板的Serial In(上排)引出插在主板的Serial In处(下排) 。最后 通上电源即可。 了解了PSCI的基本功能,并按要求连接好电路后,首要做的就是将舵机位置的初始值找 出。通过拖动进度条,并观察机器人各腿的位置,从而确定舵机初值。笔者提供的舵机初始 值均为六脚与身体垂直时的值,且2、3关节夹角近似为90°。对于要求的机器人的每一个动 作值都可以事先用这个界面调试, 观察机器人的位置并记下相应的舵机脉冲值以备编程时使 用。另外,可以通过算法运算来标定各个舵机的角度值,详细请参考附录。
机器人教育-讲稿-六足机器人

六足机器人
---连杆机构 连杆机构
1 2 3 4
连杆结构概述 搭建六足机器人 搭建指导 编程指导
连杆机构
运动副 两构件直接接触组成的可动连接, 两构件直接接触组成的可动连接,它限制了两构件之间的某些相 对运动。 对运动。 由两个构件直接接触而组成的可动的连接称为运动副。 由两个构件直接接触而组成的可动的连接称为运动副。 低副:其元素为面接触的运动副。 低副:其元素为面接触的运动副。 高副:其元素为点、线接触的运动副。 高副:其元素为点、线接触的运动副。 平面连杆机构 所有构件间的相对运动均在平行平面内运动的连杆机构。 所有构件间的相对运动均在平行平面内运动的连杆机构。 平面连杆机构是许多构建用低副(转动副和移动副) 平面连杆机构是许多构建用低副(转动副和移动副)连接组成的 平面机构。 平面机构。 看演示。 看演示。
连杆机构应用
搭建指导
搭建指导
搭建指导
搭建指导
搭建指导
搭建指导
搭建指导
搭建指导
编程指导
案例要求: 打开开关后,行进指示灯亮,并且六足机器人开始行走。关闭 开关后,指示灯熄灭,机器人停止运动。 请同学们按照要求编写好运行程序。
RoSys智能教育平台 RoSys智能
六足机器人自由步态规划及运动机理

六足机器人在各领域的应用
军事领域
救援领域
农业领域
其他领域
六足机器人在军事领域具有广泛的应用, 如侦察、探测、排爆等。它们可以在复杂 的地形中行走,适应各种环境,并执行危 险性较高的任务。
在灾难现场,六足机器人可以进入复杂的 地形和狭小的空间中,为救援人员提供信 息、照明和物资等支持。此外,六足机器 人还可以用于搜索和营救被困的人员。
未来的六足机器人将更加注重运动灵活性和适应性,能够 适应各种复杂地形和环境,实现更加灵活和高效的移动。
智能化和自主性
随着人工智能技术的发展,未来的六足机器人将更加智能 化和自主,能够自主进行环境感知、决策和控制,实现更 加智能的移动和操作。
能源效率和持久性
未来的六足机器人将更加注重能源效率和持久性,采用更 加先进的能源管理和优化技术,实现更长时间的使用和运 行。
整。
稳定性
由于六足机器人的运动稳定性受 到多种因素的影响,如地面条件 、负载分布等,因此需要精确的 控制算法和优化策略来保证其稳
定性。
能源效率
六足机器人的能源效率相对较低 ,长时间的运行需要大量的能源 支持,这对于长时间野外作业或
探险等任务来说是一个挑战。
六足机器人未来发展趋势与研究方向
运动灵活性和适应性
六足机器人自由步态规划及 运动机理
2023-11-08
目 录
• 六足机器人概述 • 六足机器人的自由步态规划 • 六足机器人的运动机理 • 六足机器人的控制策略 • 六足机器人的实验与验证 • 六足机器人的未来展望与发展趋势
01
六足机器人概述
六足机器人的定义与特点
定义
六足机器人是一种具有六个足部的机器人,通常由多个连杆 和关节组成,具有类似于昆虫或蜈蚣等六足生物的运动能力 。
六足机器人设计参考
摘要六足机器人有强大的运动能力,采用类似生物的爬行机构进行运动,自动化程度高,可以提供给运动学、仿生学原理研究提供有力的工具。
本设计中六足机器人系统基于仿生学原理,采用六足昆虫的机械结构,通过控制18个舵机,采用三角步态和定点转弯等步态,实现六足机器人的姿态控制。
系统使用RF24L01射频模块进行遥控。
为提高响应速度和动作连贯性,六足机器人的驱动芯片采用ARM Cortex M4芯片,基于μC/OS-II操作系统,遥控器部分采用ARM9处理器S3C2440,基于Linux系统。
通过建立六足机器人的运动模型,运用正运动学和逆运动学对机器人进行分析,验证机器人步态的可靠性。
关键字:六足机器人,Linux,ARM,NRF24L01,运动学AbstractBionic hexapod walking robot has a strong ability of movement, the use of similar creatures crawling mechanism movement, high degree of automation, can be provided to the kinematics, the principle of bionics research provides powerful tool. Six feet in the design of this robot system based on bionics principle, the mechanical structure of the six-legged insect, through 18 steering gear control, use the gait, such as triangle gait and turning point to control the position ofsix-legged robot. Remote control system use RF24L01 rf modules. In order to improve the response speed and motion consistency, six-legged robot driver chip USES the ARM architecture (M4 chip, based on mu C/OS - II operation system, remote control part adopts ARM9 processorS3C2440, based on Linux system. By establishing a six-legged robot motion model, using forward kinematics and inverse kinematics analysis of robot, verify the reliability of the robot gait.KEYWORD:Bionic hexapod walking robot;Linux,ARM,NRF24L01;Kinematics目录1. 绪论2. 六足机器人的硬件搭建3. 操作系统的搭建4. 六足机器人的步态分析与实现5. 总结与展望1. 绪论1.1 多足机器人的发展状况目前,用于在人类不宜、不便或不能进入的地域进行独立探测的机器人主要分两种,一种是由轮子驱动的轮行机器人,另一种是基于仿生学的步行机器人。
六足步行机器人毕业设计开题报告
燕山大学本科毕业设计(论文)开题报告课题名称:六足步行机器人学院(系):里仁学院年级专业:机械电子学生姓名:指导教师:完成日期:一、综述本课题国内外研究动态,说明选题的依据和意义步行机器人,简称步行机 ,是一种智能型机器人 , 它是涉及到生物科学 , 仿生学 , 机构学 , 传感技术及信息处理技术等的一门综合性高科技 . 在崎岖路面上 ,步行车辆优于轮式或履带式车辆 .腿式系统有很大的优越以及较好的机动性 , 崎岖路面上乘坐的舒适性 ,对地形的适应能力强 .所以 ,这类机器人在军事运输 , 海底探测 , 矿山开采 , 星球探测 , 残疾人的轮椅 , 教育及娱乐等众多行业 ,有非常广阔的应用前景 , 多足步行机器人技术一直是国内外机器人领域的研究热点之一。
目前《机械电子》等期刊发布国内研究成果如下:闰尚彬,韩宝玲,罗庆生在文献[1]针对仿生六足步行机器人关节较多,其步态轨迹规划和关节控制量计算都较为复杂的现状,采用Solidworks软件与MSC.ADAMS软件相结合的方式对六足仿生步行机器人的样机模型进行了运动学仿真与分析.通过仿真,验证了所设计的三角步态的适用性和所选择的三次样条曲线作为机器人足端点轨迹曲线方案的可行性.韩宝玲王秋丽罗庆生在文献[2]基于六足仿生步行机器人机构学特性的研究,采用数值分析法求解了机器人步行足的足端工作空间,利用虚拟样机技术计算了机器人的灵活度,从两方面综合衡量六足仿生步行机器人的工作能力,并以六足步行机器人各腿节比例关系的确定为例,介绍了六足步行机器人结构优化的具体方案.苏军陈学东田文罡在文献[3]研究六足步行机器人全方位行走步态,分析其静态稳定性;规划了典型直线行走步态和定点转弯步态,确定了直线行走步态最大跨步和定点转弯步态最大转角;进行了步态控制算法模拟仿真及实地步行实验。
王绍治郭伟于海涛李满天在文献[4]根据CPG双层网络的特点,采用分层分布式系统架构研究制了一种机器人运动控制系统.其基于FPGA的星型总线,在保证通信速率的同时提高了系统抗干扰能力.在单足控制器中嵌入双NIOS完成CPG网络解算和电机运动控制.郭少晶韩宝玲罗庆生在文献[5]针对采用电池供电的六足仿生步行机器人其工作时间受限的情况,提出了将动态电源管理、实时任务调度和运动策略规划等方法,综合运用于其控制系统,且更为全面地考虑了机器人系统的能耗等级.这种方法对于降低机器人的系统能耗起到了实质性的作用,其整体思路与技术途径可为降低其它类似的多足步行机器人的系统能耗, 陈甫臧希喆赵杰闫继宏在文献[6]从机械结构、运动模式和步态控制3个方面, 对六足步行机器人的仿生机制进行了分析. 提出一种灵活度评价函数, 基于该函数对六足机器人的结构参数进行了优化; 推导了步态模式与步行速度关系的数学表达; 构建了分布式局部规则网络, 可自适应地调整错乱的腿间相序,生成静态稳定的自由步态.仿真实验验证了上述仿生机制的有效性。
六足机器人的步态分析与实现——1

六足机器人的步态分析与实现——1六足机器人的步态分析与实现——1步态是指机器人在运动中的腿部动作序列和时序,能够决定机器人的移动效果和稳定性。
六足机器人的步态有多种类型,例如三角步态、波浪步态和平行步态等,每种步态都有其优势和适应环境的特点。
下面将以三角步态为例,探讨六足机器人的步态分析与实现。
三角步态是一种相对简单且稳定的步态,通过两组对角线的腿部交替运动实现机器人的平稳移动。
其中,每组对角线的腿部依次为前左、中右和后左腿以及前右、中左和后右腿。
三角步态通常有两个阶段,即支撑阶段和摆动阶段。
在支撑阶段中,对角线的前两条腿同时着地,提供支撑力,使机器人保持平衡。
在此同时,后两条腿离地并进行摆动准备。
支撑阶段的关键是保持机器人的平衡,可以通过传感器实时检测机器人的倾斜角度,并通过调整腿部摆动幅度来保持平衡。
在摆动阶段中,先离地的两条腿进行前摆,后两条腿进行后摆,以便于整个机器人向前移动。
在摆动阶段,需要考虑腿部运动的坡度、步幅和频率等参数,以实现稳定的步态和高效的移动。
摆动阶段的关键是合理分配腿部的移动,以保证机器人的稳定和平滑的前进。
为了实现六足机器人的步态,需要通过控制系统和传感系统来实现腿部的运动控制和平衡调整。
控制系统可以使用反馈控制算法,通过传感器获取机器人的姿态信息,并进行实时的运动控制。
传感系统可以使用力传感器、陀螺仪和加速度计等传感器,实时监测机器人的姿态和环境信息。
另外,六足机器人的步态实现还需要考虑到各腿之间的协调和同步。
可以通过通信模块实现腿部之间的信息传递和协调,以确保六足机器人在运动中的平衡和稳定。
总结来说,六足机器人的步态分析与实现是一个复杂而关键的过程。
需要考虑到机器人的稳定性、效率和灵活性,选择合适的步态类型,并且通过控制系统和传感系统实现腿部的运动控制和平衡调整。
通过合理的步态设计和实现,可以使六足机器人在各种环境中实现平稳、高效的移动。
基于无线控制的六足机器人的设计与实现
智者论道智库时代 ·275·一、引言2016年,工业和信息化部、发展改革委、财政部联合印发了《机器人产业发展规划(2016-2020年)》。
文件中明确指出机器人既是先进制造业的关键支撑装备,也是改善人类生活方式的重要切入点。
无论是在制造环境下应用的服务机器人,还是在医疗、消防等特殊环境工作的机器人,其研发及产业化应用是衡量一个国家科技创新、高端制造发展水平的重要标志。
在众多机器人中,由昆虫运动原理而来的六足机器人在救灾抢险中体现出灵活与高效[1-2]。
为了代替人完成人所不适应或力所不及的各种工作,高效的解决灾难[3],本文采用一种类似于六足昆虫的结构、三角步态和定点转弯等方式以s5p6818为主控器,STM32为检测系统[4-5],利用Android 平台和六足机器人系统,设计了一款无线六足机器人,通过对现场环境数据的采集、存储,实现了手机终端与机器人的实时通讯[6-7],最终完成了对消防机器人的远程控制和转变步态规划功能。
二、整体设计方案本系统设计的无线六足机器人是由主控系统和检测系统组成。
主控系统是以s5p6818为控制器的核心和WIFI 摄像头组成,检测系统主要由STM32控制芯片、电源管理模块和温湿度等传感器构成的子系统,具备人体红外检测、温湿度检测、烟雾检测、火焰检测等功能,并实时将检测信息传给主控芯片,主控系统通过串口来与检测系统通信,根据信息来对机器人做出相应的处理,并且通过WIFI 摄像头实时将数据和图像传输到服务器,通过移动终端远程控制机器人。
整体框架如图1所示。
三、关键硬件电路设计主控系统主要主控系统通过串口来与检测系统通信,根据信息来对机器人做出相应的处理,并且通过WIFI 摄像头实时将数据和图像传输到服务器,因此关键硬件电路研究以STM32控制芯片的检测系统。
(一)温湿度采集模块电路设计DHT11模块采用单线串口连接,方便数据传输。
由于测量范围小于20米,因此增加一个10k 电阻,传感器的第3脚悬浮搁置。
机械创新设计课程设计六足机器人行走机构设计

机械创新设计课程设计题目:六足式机器人的行走机构设计小组成员:班级:指导教师:成绩:1六足是机器人的行走机构设计目录摘要 (4)第一章绪论 (1)1.1. 六足仿生机器人的概念: (1)1.2.课题来源 (2)1.3.设计目的 (2)1.4.技术要求 (2)1.5.设计意义 (2)1.6.设计范围 (3)1.7.国内外的发展状况和存在的问题 (3)1.7.1.国外发展状况 (3)1.7.2.国内发展状况 (4)1.7.3.存在的问题 (5)1.8.具体设计 (5)1.8.1.设计指导思想 (5)1.8.2.应解决的主要问题 (5)1.8.3.本设计采用的研究计算方法 (6)1.8.4.技术路线 (6)第二章六足仿生机器人的步态规划 (7)2.1步态分类 (7)2.1.1 三角步态 (7)2.1.2跟导步态 (7)2.1.3交替步态 (7)2.2步态规划概述 (8)2.3六足仿生机器人的坐标含义 (9)2.4 三角步态的稳定性分析 (12)2.4.1 稳定性分析 (12)2.4.2稳定裕量的计算 (12)2.5三角步态行走步态设计 (13)2.5.1直线行走步态规划 (13)2.5.2转弯步态分析 (15)2.6六足机器人的步长设计 (15)2国际机械设计制造及其自动化专业课程设计(论文)2.7六足机器人着地点的优化 (16)第三章六足机器人的机构分析 (18)3.1四连杆机构的设计 (18)3.1.1理论根据与机构选择 (18)3.2设计参数 (21)3.3步行腿机构系统 (21)3.4 舵机驱动原理 (22)3.4.1驱动原理 (22)3.4.2 舵机控制方法 (22)3.5 六足机器人主体设计 (24)3.5.1 机身 (24)3.5.2腿部的设计 (25)3.5.3足 (25)3.5.4小腿 (26)3.5.5大腿 (27)第四章总结 (28)4.1.设计小结 (28)4.2设计感受 (28)4.3课程设计见解 (28)参考文献 (29)谢辞 (30)3六足是机器人的行走机构设计摘要人类社会的发展,各种各样的机器人正渐渐的走进我们的视野,有很多的地方都用到了机器人,在机器人的领域里越来越多的人开始爱好上了机器人。
新型六足机器人
目录1 引言1.1新型六足机器人研究目的和意义 (1)1.2新型六足机器人研究概况及发展趋势 (1)1.3课题研究内容 (2)2 机械结构与芯片简介2.1机器人机械结构 (3)2.2机器人运动原理 (3)2.3驱动装置选择 (5)2.4机器人实物图 (6)2.5硬件结构介绍 (7)2.6单片机芯片介绍 (8)2.7编码解码芯片介绍 (13)3 控制系统结构设计3.1上位机控制 (16)3.1.1 程序语言及串口通讯 (16)3.1.2 人机交互界面 (17)3.2 基于无线的智能控制 (19)3.2.1 无线发射模块 (19)3.2.2 无线接收模块 (23)4 结论 (29)参考文献 (30)致谢 (31)新型六足机器人1 引言1.1新型六足机器人研究目的和意义本文六足机器人是一种基于仿生学原理研制开发的新型足式机器人。
新型机器人比传统的轮式机器人有更好的移动性,它采用类拟生物的爬行机构进行运动,自动化程度高,具有丰富的动力学特性。
此外,足式机器人相比其它机器人具有更多的优点:它可以较易地跨过比较大的障碍(如沟、坎等),并且机器人足所具有的大量的自由度可以使机器人的运动更加灵活,对凹凸不平的地形的适应能力更强;足式机器人的立足点是离散的,跟地面的接触面积较小,因而可以在可达到的地面上选择最优支撑点,即使在表面极度不规则的情况下,通过严格选择足的支撑点,也能够行走自如。
因此,足式步行机器人的研究已成为机器人学中一个引人注目的研究领域,由于六足机器人强大的运动能力,可以提供给运动学、仿生学和机械构造原理研究有力的工具[1]。
在研究昆虫运动方式、关节承力、稳定姿态调整的过程中,可以运用本机器人对设想的虫体姿态、运动过程进行模拟,最大程度地接近真实,将理论和实践联系起来,从而更好地观察昆虫运动模式的优点,以及探究哪些现象能够运用到机械设计的实践中去。
这对于以上学科的研究和探索都是十分有意义的。
当然,我们还可以作为教学器械,通过研究昆虫爬行时各脚的运动情况,用机械形式表达出来,也可以作为仿生玩具及探险、搜救设备,还可以进入细小管道、地洞中勘察。
六足机器人行走与运动仿真分析
{ | .
l I r I r l 阿 l l
. 1 J k
( a ) 重心位置 曲线
( b ) 重 心速 度 曲线
( c ) 重 心加 速 度 曲线 ( 下 转 第1 5 8 页)
图7 0 = 2 2 。 时 的重心曲线图
・
设 计 分 析
对作 品的呈现方式在都是未 知的, 这 就导致 了交互艺术设计作 网络 的二次传播 。 因此 , 作为开放性的艺术设计作品, 其效果 并 品在 形式表现 上的开放性 。 此 种开放性 必须发生在作品和受众 不是 来源 于作为设计师个人构思和创作的静态实物作品的独立
的互动之间, 若用物 理学 中 “ 力是相互的 ” 这一观点来看, 当受 存在 , 而是来 自于 由受众协力控制的演变 发展 、 不断变化 的多
这些作品在现场看起来并不像事先控制 的, 相反, 它们 众的注 意力作用于特定 的作 品时, 作品受 到外来作用力, 其形 元过程。
态或结构等会发 生相应 地变化 , 从而按照设计师 指定的规 则生 需要观众的互动来激活, 并且这些 作品如果不是处于创作 的过 成反 应, 带来 的作 品在 形式上 的多元 性。 为受 众带来不 同的视 程 , 它们就 无法带来 交互艺术给人 的情感上 的愉悦 , 不能满足 听感受 。 交 互艺 术设计让 观众 置身作品其间, 可 以对 作品形 态 消费者对艺术设计在情感上的审美需求。 进行改变 , 从而发生随机、 多元性的变化 , 这些变 化并不能完全 4 开放性在 交 互艺术 设计 中的意 义与价 值
0 O O O O 0 0 0 0
0 O
∞ ( ∞ ∞ ∞ o ∞ c ) 重 加速 度曲线
图5 0 = O 。时的重心曲线图
足式机器人足力及平衡控制方法设计

关节PID阻抗控制器机身姿态和高度控制器图1 足式机器人整机控制框架742023年3月下 第06期 总第402期工艺设计改造及检测检修China Science & Technology Overview滚的角度和角速度和机身高度信息,采用PID 控制方法形成第二环及第三环位置补偿,以保证在解决缓冲的作用下还能对机身姿态和高度都得以控制。
俯仰和横滚形成的机身姿态位置补偿可以表示为:0000()()()()p pp dr rpr dp k k k k ααααββββ∆=−+− ∆=−+− (5)机身高度h 可以通过各关节的转角反馈结合正运动学计算得出,此时机身高度控制的位置补偿为:00()()h ph dh k h h k h h ∆=−+− 4.实验如前文所述,为了在机器人足端期望力得到稳定的控制下,还希望机身姿态和高度能够稳定,结合式(4)和式(5),即有机器人竖直z 方向的位置补偿为z r p h ∆=∆+∆+∆+∆。
设定0αα== ,0ββ== ,设定期望机身高度为0130h mm =,支撑相时希望机身高度稳定,即需要00H = 。
阻抗设定为过阻尼状态[6],设定参数为1dm =,300d b =,2000d k =,10000e k =。
实验中让六足机器人首先从平坦地面开始原地摆动,通过交替的踩踏硬质物(哑铃)和软质物(泡棉)来模拟不Time/s-80-60图3 机器人运动时各腿受力图图4 机器人运动时各腿实际轨迹工艺设计改造及检测检修China Science & Technology Overview02040Time/s-2020横滚角速度/(°/s)02040Time/s-2020俯仰角速度/(°/s)the expected foot force when the environment changes, and through the body posture and height control, it can maintain the balance of the body and improve the stability of the robot motion.Key words:footed robot;impedance control;foot force control;attitude control;hexapod robot752023年3月下 第06期 总第402期。
基于Raspberry Pi的六足行走机器人设计
44H I W-s{p z H C@-5S`e\q W: |j h N4b U u Sk i s Q T k e:X H a{4 R S H P E,V s1X\q W5{X\q W g g\X \q W6u`e\q W{2l W j h M;>N Z1 M}R d w H g k S e s]x5,Z K\N/A t k6g Q^\X`e\q W6>{^k5{Q;q H[7g T S S j i Lc H c X7s S_7C}{ B[7>Q h g g f*j<5M>]x5~;,p K{{M;,Q S~7x t N9644e\\q W^\X\q W H[|U g2P S Z 6>[y\X\q W H g T@S C[7[U5c X Lc5i Z a_/Q;q{S s;b q l5d>{>5j/k5SO k o L M k:T P<X N\:H 8]kCl6l x S W z@@e x e\\q W j i N;h :|S Z C G N[_H:|B X S f:p1-/} k7u@3L\o~R3.H s p z x\A2;d j i N c i f F:|S i X~7C e\\q W k e O=H k K[~kDl S-[J x/}:-N<e=9 F=,Z\q W kEl S H W/D1-}b:r N7C Q @ie]x H e\\q W Wr{tuv kFl S t x6-W Q e >:|Q7s N7C:~H e\\q W cY\_?H kGl K6 G X-f S<N\q W H i Z S N~S G X\q W [z s i Z Y C\\5v g[U B B`n>B k e K b j S/G d H N\W c~7C:;5C\K\j97j0p j4j0_9E k0p=8j.jg x mU k6[P+kE Vy U.6[0e?x m lojikm1kg e<Ox e kE7Q;I[0e?e<lomiii/W.t K4A d x F aS I>NS j g-b s h9~|n O F.6-@-i R\N4Vx L M k6f}4Vx`Q4c{4N:U e.z K R\4Vx a v`N k d@o g s P P*M R V]evsfiuu{[m.K8]e}9A X P=f}-|4Vx6u o i w n d`Kg H/r}U64g-|4N c{9A6V U e A d y`Ky S,67H`i7q9~08V O G=2;6M Q u K+{8]~KH J8~w\Q>O G=6V>I4A d11S,}m fS Y-|\KH:w h9~_N6N*Du U t]evsfiuu{[m8f}4Vx8i w n d8+{8]_ebt BA?DJGJ@n?mvvq?BAAH>FFAb?CACC?AB?AAIl9.T M t_[CEC J]0b j t M J X.M t BAAH>FFAb4CACC5AB>AADC>AH3G GIOMJKNNP FLg N\5[4Z]a7**a1a v t Y n f;e H{N~C v{a v q a v.M t@B=?Z?=?=@=CCru?=>F{e f v S J P J J x U a v q a v.M t?@=C=A?=ru?=>F{2x Z+H;e{G{v9>{;a v q a v.M tLHPM?=>F=@=DruY nV@v N e f[v X S hw[a v m j z>P~`b3F nu?=>E{c|f H gjX a v q a v.M t?=>ERYLD==Crki<I/t CACB>H>BH/[s0t F?:4BJJJ,56D6M34c6k K@o u r7V W F{:Q w\y*. All Rights Reserved.N S 9W k -[{_C S F:|U u kHl 6[C m S A ^}7s [d g bn +}or **1`v P [r m c H e \i Z \q W S [q {{X q <S V i 6={Q ;q 5`E [r 5SO -[o Q e G >K .{S S <x e \\q W H j [c :|6O^1I3O5b44f e \i Z \q W U k 7s :n f 1C Q Y 6g bn +}or **1`v P 4[{S 7I |B V K `f P V ^a a S H D l F 4H Q ~bn +}or **1`v 5cd]ED m c {oDF l |\[r {0V 6x Y 7p |s <>7Y e3L -S ;g A G S A j f H 1L ;|s <b SD h \G V :Y 6m @S cd]ED A T g A x d a a J n u q s {i W p q J h \Q``j i x d S *4Q``-b He f `^S cd]ED j iI ~Z M bn +}or **1`v -:d j S g V \q W j h a {-f a X Z x Y |\[r {[r |\S <B ~e f 6f \q W 6=Q e o h e D {-f a X S s h e a X 0S *4h \Q``-b He f `^S S H Q S <\q W x j 5/95d?5@?e f W s Q e a X 0S [q 4A \b o q S \q W H x i Z Z Q e G >6P^Z?;>i ^0,C U j44f e \\q W H U k [7f 1D Q Y S 4R ;\:o e s 7`B 6x YI |S ]{\i P @k [7{P /=]h Hx ?[7S G{[7S 3Z B W 7/H k e Y /,D a /S G S B W 7/7B k 564m S A \:7s P /=]h z T H e H h S H |e H h H^d H Q T H s 7S x ?H b s \:I w 6G|7s H g T ^s q 197Y /H [\-S S <N 7d k e 7O a />S i u \q W H a _k o [U k 6;i b VU j44k B q 197Y /5:P f r H Y|S [q }.{a a q <S f e \\q W H \:j 7*y [7S w /]O e \\q W H P F Wj i A T S 6k f 1E Q Y 6;@i >9U j44P :\\>U |\k Z 6e \q W `eH q <S 7d [7H 7s :n 6k f 0V44J x ~2d 7d H [F W 5[8AF W oA 89F W S 7d [77s P E |Q ;q S H Q P P F W 5K F W o z F W 6i w P F W [r 7d H x /v e S K F W [r k e O 7d H T m o A 0e f S z F W 7C S <h 7e f 644K T 7e r j 7A r N 6D S V G 7d J Q T H T ^S k 8Z P ^A T T ^S {O |c e r 6D [7A T D |T 7A T<S g ,D |D D |z F W A T<H l H 6m @S s T ^T 7s N /m S g */d e S =i k e Y E w *B .;<N 6447d [7H r e 1f 0QY 69>^0U j~w9?b +b 3F ^0,Ct k9@b +b 3F b V ,C t k. All Rights Reserved.444444444444Q^k F AH@;>i E H 8,U j44P S <e \\q W s ,YY [l T -i Z O S e f a _d /Z3J R b @q S A 7s |{r N c X f P f \q W H .O c X S 6k f 1G o H Q Y S i w t v P Y \>B St v P Y v e B S+P Y +|c /6r N c X ^6Y B `Y8O H \h c X S Yn O V h >\>B X v e B S D >{O z s H O /u W ]@S k e O e 7C I `r N h J l \>8c x j S i i Z R _Z B ^c A S ~^C <`=R h H ?A x j kIl 6@;?i N z 8,K m n .R44\q W k i O S j R t c ,.s \>\7B Hr N h >N z S i .^a _H S [74X 7O S i.P J a S S {w B 9}M @6t c ,.s Q T H T 70\>\7B H r N >N H H H a s 70?P a _V q 6:N S a _V q d /S \q W d a _644f 1I Q Y S Q C 5Q D 5Q E r T P h [O V e \\q W H r |\>\s Q T -H \>T S1:M P e \\q W H x j :M 61z v e 7x t c g g K k >x a _k H .I S *7t c P e \\q W H n p w c k Y T _S q C 5q D 5q E P \q W t c ,.D \>r N h }H H g c 70S S s F a _V q S g ?v \q W H a _k 644;<\>r N h }H Q s c A H [y 1X^*4B WI s 7H \r R _0s T s F H S g Q C ;0C S1C <S Q D ;0D S1D <I T P :S S G X J64;1D T1C <0T ;0D T0C <1R ;0D T0C <1C T ;1D T1C <0C OB J 44r *4TD c A H 701X S G X t c ,.D c A H 701X K6K44s U |H q U u S p t c ,.D }H _s F a T 70S N /C a T f f P c X O =H a _V q S k cOzv{\q C S q D S q E :^6u m S j R \q W s i Z Y E w H t c g c ,.W z ?i J l K >H ;\T Q `B H{H h Q 1O S .S g 0S ^u X a _H kJl 6R^XKy U 3OA;>i >v uk A;?i V6>v Z }:e;I W ;:f;.W ;:g;m W ;9A b +b 3F >9,C t kCD9B N z 8,m *e 599C N z 8,b H `E y p `p/e 599D N z 8,K m H r j }9]0D 1C T0C 1D ]qO 8888888888;0C T0D <D R ;1C T1D <DE . All Rights Reserved.44+*0<H A T f 1J Q Y 6S^XK0U 3OB;>i r J s U j444E w d E f 1K Q Y 6f e \\q W 7s N D {[r a X S [{^Q e [r a X S [{^h e [r a X 6s Q e a X 0S e \\q W f Z x j Y E w xY 4A \b o q SO -x J x :>g o H 70S =2x D J >g o 70T C DG pz O S j i G >6s h e a X 0S x Y h \Q``z r h ^[r \q W x j 5/95d?5@?6B;?i o =N_R l J s U j44A 7s H ~4g A b p d E 6k f 1CB Q Y 6x Y c \M g A x d a a Uc`JDHH?BCc -:B ~H Qd h ^S S <A T gYVY o u q s {i W p q K .{6u q s {i W p q P 78i 0N J n ]add W p q 5]add `h A C Q `h ~4o ]add -b ~4H.1a ~S G X a ~C p N ]add Y r H [r 7^z X S 1k A T 5-b o `h H 7^678Z 7-{a ~O j q o [B ~H h \n ~S :f Y`Q g 5r \j 54j 5O T _578_5Q1o Q w K S N /.1a ~P k B ]add Y r H [r 7^z X x h \n ~j i A T S Z ?>P CH j r H ~4-:~21W p q S B B J n ]add W p q 5-b o `h Q w K .{61>b +m *b 3F b r.>v tN 9]8~v noiUT [z /{/{/~b b lD y T [l M 8k x c,e B ]c,y ;Y N c,mt 0-ux //5k|U^noiUTbVRYscoX j M bic[R 0hn_OTV hTW[X `_O`_ho_UYZR `_O`_d_OnmRVmt 0-ux //5k|p ~f -e B ]]ogOankZTXXl ~K z T Y .9q7>E9q f9?~b N i eM 5f M T y ]kk *A N i b R w wM 5L x /1N e Z [A p 5M e Y /F b ~b S[L {/N R L 2\Q R l 8y m lD y T N 8~v 6UT [z /63|y|c,R l W Q P e T [c,y m lD N {/~b b R lw 8o I Q mw 8_B ~6k _B O 3>Y `t c m <=}1T w 8]kk k [z /Y G e Y N9E V6>v b Z}99F r J s aJ 99>=o =N_R l tNZ }a J 9. All Rights Reserved.B;@i 8,HX J s U j44S <e \\q W H c X e f S t .^g K F W |\H N q S u m c X O =S w .^7s |\?e [r E w S 6k d E f 1CC Q Y 644i 3S q 97|\[r {H -[\7p h e f `6*4e \\q W G s 7H Q >E |Q ;q 7s f 1CD H -[\[r T {644|\;a f 1CE Q Y S |\H S w [p O |\=x [p =|\O }6Z U x ~|\H ;m S 7p 9O c q S S S <x|\?e N qH 7p 6f e \\q W q 7p He f`1k V x j 5/95d?5@?6]@7p N [|?-e f S _7C G >a X S S sE w =wc T Z 76||\H [r a ~j i 7p S a ^7-[\[r T {644g d?P :q 0\e f`7p :16d?e f ~4f P D Q Y S i w <7=P Y |\I j S<`=P Y |\H [p S dvzr P Y e i f e f |\k i H O /6d?[|c /q R r Y H |e f K E V C j e f P W W M X S Q >7k _C -Q \>D X W D j e f D 5F 5H 7f P \>`S T m C 5E 5G 7W E j e f C 5E 5G 7+O K v e S k G 7M x S C 5E 7M /S {O D 5F 5H 7/O K k e S k D 7M x S F 5H 7M /S g m 6e \q W d?W F j e f C 5E 5G 7A 0f P \>`W G j e f D 5F 5H 7T m K P v e `S {O C 5E 5G 7H P F W /O K M V S 1e \:j i d?e f W H j e f D 5F 5H 7+O K v e S {O C 5E 5G 7x x /O K k e S x x 6e d?e f S V d?e f ,P A L 6x Y 7pG H |e f ,B K E S V C 5E 5G 7o D 5F 5H 7J l \>5v e S .B B d?e f 6]o 7p h F |e f`Sk /w0q 3z D|\[r {w 644s x {-f [\-S T I |s <x Y c \x d Y r S -:V L H [rh ^~|\[r {g Z 73z s i w He f`6a /S |\[r {[r |\I ~B ~He f `^6B;Ai G W 4?>J s U j444A \a a x 7H -f Y 1^x Y O //{q s F 70S i E w 7s d E f 1CF Q Y 6i 3S x Y ,*vt r \-:[|/C CB c+H u V Y 9O^-d1?.w p /-T U V W XVRR VRR VRR VRR VRRJSU k[RR JSV kSWRR JSX kSWRR JSY kSWRR JSZ kSWRR JTR kSZRR JTS k[RR JTT kSWRRJS kSWRR JT kSZRR JU kSWRR JV k[RR JW kSZRR JX kSTRR J[kSWRR JSR kSZRR JSS kSWRR JST kSZRR JSU k[RR JSV kSTRR JSX kSWRR JSY kSWRR JSZ kSZRR JTR kSZRR JTS k[RR JTT kSTRRJS kSWRR JT kSZRR JU kSWRR JV kSWRR JW kSWRR JX kSTRR J[kSWRR JSR kSZRR JSS kSWRR JST kSWRR JSU kSWRR JSV kSTRR JSX kSWRR JSY kSWRR JSZ kSZRR JTR kSWRR JTS kSWRR JTT kSTRRJS k[RR JT kSWRR JU kSZRR JV kSWRR JW kSWRR JX kSWRR J[k[RR JSR kSWRR JSS kSZRR JST kSWRR JSU kSWRR JSV kSWRR JSX kSZRR JSY k[RR JSZ kSWRR JTR kSWRR JTS kSWRR JTT kSWRRJS k[RR JT kSTRR JU kSZRR JV kSWRR JW kSWRR JX kSZRR J[k[RR JSR kSTRR JSS kSZRR JST kSWRR JSU kSWRR JSV kSZRR JSX kSZRR JSY k[RR JSZ kSTRR JTR kSWRR JTS kSWRRJTT kSZRR9>>w b w p K i aJ 99>?b +b 3F w b K i z S H b K i p z9>@w bW N. All Rights Reserved.j 6N /S *4+*x /O /}s F rpu|r \J x u V Y H O /S a /*41X s F X J >g o H 70Z j i @f x \_1644T^:U C>p 0<44A 7s Q G e \\q W H ET 1o S o16k f 1CG 51CH 644x f e \\q W H .{j i 5Y 6i 3G \Q o e -[S S x Y h \G V SO -x 6444444r x Y h \Q``[r ]T P 1CI Q x \q W H k i a X j i|{644s h e [r a X 0S *4h \Q``-b He f `^S \q W S <x j 5/95d?5@?e f 644s Q e [r a X 0S \q W f Z x j 6=2x D >g o O S h \Q``]T :Y <qn{tr *|-+=P 1CJ QS \q W j i /9o @?H G >e f`6U^Z ~44A ^j 7bn +}or **1`v 53L -54A \b o q 5|\[r {5Uc`JDHH K .{a a S Z x Y Q}}r fo ET .|`B S 7s N [d bg e \i Z \q W 6r x f S f \q W 6=`E [r 5{Q ;q 5SO -[o Q e G >.{6U k +*R PB *S :\s B [7>Q h w a _i Z Z SO u W j f d w H R <S S `d k }5s {>E q R u S 6>S w ~7+f 6/x -f w S j [c Lc c X S X z h F 1q S <6~c X O =S V e \\q W H B v _~k j [c i u 69>A G W 4?>a J99>B b +b 3F @J 99>C b +b3Fa P99>D j b GTT K i .p9>E q ?`Z v P _b j bGTT .p. All Rights Reserved.44H I c ,q <H *|S U q X k c ,y >R /6c W X k n W R {S w Lr *U Z -S H I H;?j H z T S 9l Y /?4N S d H n W ?g x w u @X k *U j i G -S a v :-X :\Q F F \V g +Mq <H X k 644A ^g vp V P Y O S :-[{+M Lc 5\o ?z H n9z >X k Q U S :\W J =x x u U t X k q <S u j vp V X k ,W >-56P -T R CD V Q=G J]tkCl ;c >;:>V h X >K @O u v N g a ?j X k H -h:|kZl@5*U |->DBCK;CD<LEH?FB@kDl t >>/s @v N ?j X k H -h:|kZl@E Q J<_>DBCJ>EC;BK<LII?JB@kEl 2y L >]c B @v N }Q ?j X k H :r kZl@<25W:|>DBCJ;BJ<LCBD?CBFMCBJ@kFl 33*>;^8>Y u >A66@n E X k :|<D kZl@Q U -W >DBDC>FD;BH<LFCB?FCF@kGl d 1Y ><B C >G E :>K @v N -Q g X k B *-h:|kZl@E Q J<_>DBDC>EF;BF<LCEI?CFB@kHl b H >b O h >H 5>Y [f >Y 6>v o *>A ->;e @vp V H Q Q +f g G -97kZl@5*U |->DBCH;CJ<LGI?GJMHC@=G J]tkCl E [C @e \\q W 7s 8>Jk e [r kTl@t 3L N t /}>DBCK@kDl G M >]5X >+:B >K @>B e \\q W c X O =v z S F:|kZl@:w Q p /}}7;Q N Q }|<>DBBI;CD<L ID?IG@kEl E b X @{\c i \q W k e g >O =:|kTl@j c L :w Q p /}>DBBG@kFl R *||x +b Q@Q *|o|,,un ,/nyx +Lrzr *tr{,orun .v|*+s *|z n pn *rs -yy 1r .|y .rq {r ,/|*xkZl@^r -*ny S|z}-,n ,v|{>CKJK;BD<L DGE?DHD@kGl U +,*rzr *n Z>S|on{|Z@Q>W|{2nyr 2qr cn{,|+`@S|{,v{-|-+s *rr?p *no tnv ,+s|*ur 0n}|q *|o|,+|{n {n ,-*ny ,r **nv{/v ,u s|*ovqqr{2|{r +Ln{n}}yvpn ,v|{,|u -zn{v ,n *vn{qrzv{v{tkZl@b|o|,vp +n{q Q -,|{|z|-+c 1+,rz +>DBCB>GJ;BG<LIBB?ICC@kHl 2:}>;\l >;?:>K @e \\q W F ;p z V {kZl@\\7s >DBCG>ED;CB<LC?J@kIl h M C ><U >b \5@[r e \>B \q Wr N c X H :|kZl@s F \>J >DBBI;BF<LCGJ?CHC@kJl bA j >;}>u ?:@e \\q W v Mi Z c X :|kZl@H B 1-/}}7>DBCC>DJ;BD<LDDG?DDK@. All Rights Reserved.。
《足清障机器人》PPT课件
六足清障机器人
题目来源 作品功能及特点 作品结构 作品工作原理 作品创新点 推广应用价值
1、采用六足行走,与传统的轮式、履带 式行走相比越障、攀爬的能力更强, 实现前后行走,原地转弯;
2、采用双铲夹取结构,与传统的单铲相 比效率更高,还能够完成单铲很难完 成的任务——抓取、搬运较大石块或 不规则障碍物;
作品原理
1.行进原理
本机器 人为足式行 走,三只 “脚”交替 着地,行走 稳定,越障、 爬坡能力较 强。
作品原理
2.转向原理
三足着 地,两侧 反向行进 完成转弯。
作品原理
3、手臂原理
多自由 度的手臂上 安装两个铲 斗,使其不 但铲运效率 高,而且可 以抓取障碍 物。
作品原理
4.电控原理图
手 臂 升 降 电 机
3、可遥控操作,代替工作人员在危险的 环境下工作,确保人员安全;
4、可对塌方现场进行拍摄;
5、可携带探伤、检测设备等装置。
塌方清障机器人
题目来源 作品功能及特点 作品结构 作品工作原理 作品创新点 推广应用价值
1、六足行走系统
2、双铲清障手臂
3、遥控系统
六足清障机器人
题目来源 作品功能及特点 作品结构 作品工作原理 作品创新点 推广应用价值
六足清障机器人
作者:邓作鹏 孙捷夫 马慕嘉 吴丽娜 明泽
六足清障机器人
题目来源 作品功能及特点 作品结构 作品工作原理 作品创新点 推广应用价值
题目来源
车辆 被掩 埋
行人 道路 受阻
山体塌方
现有的大型机械很 难进入塌方事故现场完 成清障任务,即使到达 现场也容易造成二次伤 亡,而且效率低下。
基于这些,我们想到设 计一款功能更加齐全的 清障机器人来解决以上 问题。
l六足昆虫机器人机械原理
一、基本原理本项目的机器人,传动系统还是继续利用“摆动曲柄滑块机构”原理,把减速电机的旋转运动转换为驱动腿迈步的往复摆动运动,再结合简单的连杆结构,协调六条腿按照昆虫的步态规律实现爬行运动。
1、运动方式本项目机器人是模仿拥有六条腿的昆虫的爬行运动。
昆虫爬行想必大家都是见过的,但是由于昆虫的六条腿还是多了些,而且一般昆虫的动作都比较迅速,观察起来有点眼花缭乱,所以可能很多人并不是很了解昆虫爬行时这六条腿是如何协调动作的。
而要做好六足爬行机器人,就要清晰的了解这六条腿的每个阶段的步伐状态,也就是我们常说的“步态”。
实际上,一般六条腿的昆虫,是以三条腿为一组、共两组交叉进行协调运动的。
同一时间内,有一组也就是三条腿着地,另外一组的三条腿是离开地面的,然后两组交替切换往前爬行。
我们都知道,三点可以确定一个平面,即三条腿可以保证整个身体的平衡,这也许就是很多昆虫都是长了六条腿的主要原因吧。
以下是六足昆虫爬行步态的分解,以前进方向为例进行说明:1、静止时六条腿都是同时着地;2、前进时,先迈出第1组三条腿(左前、右中、左后),第2组三条腿着地(右前、左中、右后);3、第1组三条腿(左前、右中、左后)往前迈出着地后保持不动,然后换第2组三条腿(右前、左中、右后)往前迈出;4、第2组三条腿(右前、左中、右后)往前迈出着地后保持不动,再换第1组……如此循环往复,同一时间都保证有一组三条腿着地以保持身体的平衡,并不断往前进。
2、驱动机理本项目机器人是采用六足爬行的方式运动,对于六足的驱动力量也是有一定要求的,所以与前几个仿生类机器人项目一样都是借助减速电机所具有的“低转速、高扭矩”的特性来实现的。
与PVC-Robot 11号、PVC-Robot 12号机器人驱动双臂以及与PVC-Robot 13号驱动双足类似,本项目机器人六足中的中间两足是主动足,是由减速电机直接驱动的,而采用的减速电机同样也必须要满足两个条件:1、拥有足够的动力,能够支撑双足行走;2、减速电机左右两侧同轴输出。
控制六足仿生机器人三角步态的研究_漆向军
— 159 —
AB STRACT:B ased on the princip le s o f bionics and the m ovem en tm echanism o f the hex apod , the tr iang le ga it m ovem ent princip le of hexapod robo t is ana ly zed. T his pape r describes seve ral basic parame te rs o f ga it rese arch fo r hexapod robo t and discu sse s the g ait study m e thod u sing re lative m ovem ent p rincip le. Then the com ponen ts o f the F ischer te chnik part a re used to build a six - legged robo.t T he m ode l posse sse s the cha rac te rs of sim ple stru cture, unique design, can wa lk fo rw a rd and backw ard, and can avo id m in i - ba rrie r. T he expe rimen ts show that this robo t has good m obility and stab ility. K EYW ORDS:H exapod robo t;T ripod g ait;Fou r conne cting rod m echan ism
六足机器人的步态规划及环境感知
六足机器人的步态规划及环境感知发布时间:2021-08-16T09:38:10.240Z 来源:《科技新时代》2021年5期作者:徐文理,张元博,马宁[导读] 通过在地面上选择最优的支撑点,达到机身最佳的平衡状态,对崎岖地形的适应性也会更强。
苏州大学江苏苏州 215000摘要:六足仿生机器人的步态灵活可控,对复杂地形的适应性强,相比于轮式机器人和履带式机器人具有一定的优势。
本文主要研究六足机器人的软硬件架构,以及行走步态的规划方法。
同时通过搭载深度摄像头,实现机器人对三维环境的感知,提升机器人运动过程中对未知区域的适应能力。
就未来发展趋势来看,六足机器人的应用前景广阔,该领域的研究具有一定的理论意义和实际价值。
关键词:六足;仿生机器人;步态规划;三维感知一,研究背景随着人类对自然界探索的不断深入,遇到了许多无法或者很难到达的区域,比如灾难废墟、狭小的地下空间以及外星球的表面等等。
为了实现这些复杂环境中的有效运动,移动机器人应运而生。
一些地形所具备的复杂性让轮式机器人和履带式机器人望而生畏,轮式机器人会因地面不平而导致其运动速度大大降低,履带式机器人虽然对崎岖地形有一定的适能力,但机动性依然不高,移动时机身的平衡能力较差,相比之下六足仿生机器人的优势就显现了出来。
多足昆虫作为地球上最成功的运动生物,它们凭借近乎完美的肢体结构和简易轻巧的运动控制方法,能够灵活的应对各类复杂的地形。
因此,对昆虫仿生学的研究就变得更加重要,这对提高六足机器人环境适应性有重大帮助。
此外,多足步行机器人的运动轨迹是一系列离散的足印运动,只需要离散的点接触地面,所以对环境的破坏程度也较小,这是它的另一项优势所在。
通过在地面上选择最优的支撑点,达到机身最佳的平衡状态,对崎岖地形的适应性也会更强。
同步定位与地图构建(SLAM)是机器人依靠视觉、激光、里程计等传感器,对未知环境构建地图的同时实现自定位的过程,在机器人自主导航任务中起着关键作用[1-2]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要以六足机器人结构套件为基础,搭建移动测控平台,包括设计总体方案和各个模块实现方案,设计和制作伺服电机(即舵机)主控制板和传感器电路板,设计机器人行走方案并编程实现,实现超声波避障。
采用细化的八步行走算法来实现行走控制,采用轴向舵机序号确定其他舵机运动方式和次序的方法进行行走方向的控制,这样完成了对18个舵机的控制任务,使得机器人能够比较协调、流畅地行走,并且可以控制其任意的行进方向。
主控制板能够基本满足需要,但还需进一步改善其稳定性和可靠性,并增加功能组件如引导程序下载接口以及键盘等交互器件。
进一步研究指南针和超声波模块在移动测控平台上有效利用,并开发图像处理及远程信息传输等技术,使六足野外机器人测控平台有更广阔的应用空间。
可应用于户外环境参数监测、特殊任务执行、家庭助理等领域。
关键词:舵机 msp430单片机行走算法超声波传感器AbstractSix feet robot is based on special robotic configuration including 18 servo-electro motors. My task is driving it to move, for I must first design the PCB, weld the PCB when it comes back, connect wires to the PCB and programme. The robot at last moves smoothly, glidingly, in each direction I want it to, of its six. Before programming, arithmetic of eight-step is used to push the robot to go forward in one fixed direction. To make it generalization, I conclude the very arithmetic by which movements of every servo-electromotor can be computed if the number of the direction servo-electromotor is given. The next task is that the robot can move in the direction which is judged as the best one after checking the environment by ultrasonic. Having a pair of eyes, the robot can see where the block is and where it can march over. The main controlling board is all right but it can be better if more steady and reliable, and if more functional parts is added as keyboards and the interface with Boot Strap Loader. It deserves to do further research at the moving measure-control plat of six feet robot on the use of sensors as ultrasonic, compass modules. It is useful to develop the technologies of image management and remote info-transmission at the plat, too. The measure-control plat of six feet robot is widely used in measuring weather, doing special tasks, and as an assistant in house.Key word: servo-electromotor msp430 stepped arithmetic ultrasonic sensor目录目录绪论 (1)第一章机械结构改装及设计 (3)1.1 原机械基础上的改装................................ 错误!未定义书签。
1.2 设计加工的机械部分................................ 错误!未定义书签。
第二章电路板设计、制作与调试 (10)2.1 总体设计 (10)2.2 主板设计 (12)2.3 传感器板设计 (14)2.4 电机稳压电路设计 (18)2.5 安装调试过程中的问题及解决........................ 错误!未定义书签。
第三章行走算法及程序细节 (21)3.1 编号、建表 (21)3.2 行走动作算法及动作细化 (22)3.3 PPM产生程序及其他 (31)第四章传感器的使用 (39)4.1超声波传感器的试验 (39)4.2 系统流程 (41)第五章总结........................................ 错误!未定义书签。
5.1 未完成的工作...................................... 错误!未定义书签。
5.2 六足机器人应用前景探讨 (43)结束语 (44)致谢 (45)参考文献 (47)绪论1绪论搭建六足野外机器人测控平台----这就是本人毕设的工作要求。
首先要做的控制18个舵机,使机器人能够按照要求运动。
在这个问题的解决上,可以说是完全想象的结果---想象着怎样安排细化动作的步骤,怎样利用摩擦力推动了机器人前进,就这样形成了六足机器人的八步行走算法。
让机器人改变轴向从而改变前进方向的推导算法,是有价值的尝试,其结果也是令人欣慰的。
当然仅仅运动起来并不能成为一个测控平台,机器人必须具备对环境的感知和适应性。
选用了超声波传感器和指南针传感器分别作为感知周边障碍和行进方向的检测器件。
麻省理工学院的人工智能实验室的移动机器人小组做着和本人同类型的工作,但是他们的研究方法却和本人的大相径庭。
他们对昆虫发生了浓厚的兴趣,他们认为这些弱小的动物群体在复杂而又危险的环境中能够得以生存是一个伟大的奇迹,而昆虫的大脑在世界上却是最小的,然而最小的大脑却让这些小虫子有如此大的能力,以至于让我们认为最先进的机器人都无地自容。
他们联合其他的科研工作者提出了基于行为的机器人学。
这一学科不但在学术界影响重大,而且被广泛应用于各种领域,包括火星探测。
研究方法很大程度上是客观条件所决定的。
这些研究人员有足够的时间和财力来尝试验证,而本人的毕业设计时间只有区区两、三月,还要做电路设计、供电设计以及加工绝缘层、支架这样的琐事,而毕业经费也是几百元而已。
值得欣慰的是想象力终究绽放出了花朵,机器人前进的姿态竟和海龟游水一样流畅,如果把其中的两条腿当作海龟的头部和尾部。
还有一些可贵的设计思想,如用伺服电机带动传感器使传感器电路设计难度及安装难度大大降低。
Abstract第一章机械结构改装及设计第二章硬件介绍2.1 六足机器人中常用电机介绍六足机器人之所以能完成各种流畅的舞蹈动作,在于它身体各个运动部位都装有相应的动力源(驱动电机)。
目前在六足机器人中常用的电机有三类:直流电机、舵机和步进电机,它们各有优缺点。
其中直流电机功耗低、力矩大,通常用于闭环控制系统;舵机控制精确、力矩较小;步进电机控制精确、功耗较大、力矩较小,通常用在开环控制系。
在表2.1中详细列出了这三种电机的特征比较表2.1各种不同类型电机特征比较表般能驱动的机器人重量不超过1~2磅(l磅=0.453592千克),而舵机可以驱动重至5磅的机器人。
参照上表。
本课题设计的六足18自由度机器人最终选用了舵机作为驱动电机。
下面将具体介绍舵机的内部结构、工作原理和控制方法等基本知识。
2.2 微型伺服马达基本知识2.2.1微型伺服马达简介微型伺服马达在无线电爱好者的航模活动中使用己经有很长一段历史,而且应用最为广泛,国内称之为“舵机” (见图3.1),含义是“掌舵人操纵的机器”。
可见,微型伺服马达主要用作运动方向的控制部件。
伺服马达本质上是可定位的马达。
当伺服马达接受到一个位置命令,它就会运动到指定的位置。
因此,机器人模型中也常用到它作为可控的运动关节,这些活动关节我们也常称它为自由度。
图3.1 微型伺服马达微型伺服马达有着如下优点:大扭力,稳定性好;控制简单,便于和数字系统接口;体积紧凑,装配灵活;相对经济。
但它亦有着先天的不足:首先它是一个精细的机械部件,超出它承受范围的外力会导致其损坏,其次它内藏电子控制线路,不正确的电子连接一也会对它造成损毁。
因此,很有必要在使用前先了解伺服马达的工作原理,以免造成不必要的损失。
2.2.2微型伺服马达内部结构图3.2 舵机内部结构图如图3.2所示,舵机内部包括了一个小型直流马达、一组变速齿轮组、一个反馈可调电位器和一块电子控制板。
其中,高速转动的直流马达提供了原始动力,带动变速(减速)齿轮组,使之产生高扭力的输出,齿轮组的变速比愈大,伺服马达的输出扭力也愈大,也就是说越能承受更大的重量,但转动的速度也愈低。
2.2.3微型伺服马达工作原理及控制最简单的舵机就是一个直流电机加上一个减速比为180:1的减速器,同时使输出转矩增大了180倍。
由于设置了一个电位器(可变电阻)可随时检测输出轴的位置,所以电子控制板可以将输出轴精确地转至设定的位置并维持在该处。
直流电机的这种控制类型称为电机闭环控制,这也正是“伺服”这个术语的含义。
一个微型伺服马达是一个典型闭环反馈系统,其原理可参看图3.3。
图3.3 舵机工作原理图如图3.3所示,减速齿轮组由马达驱动,其输出轴带动一个线性的比例电位器作位置检测,该电位器把转角成比例地转换为电压并反馈给控制线路板,然后控制线路板将其与输入的控制脉冲信号比较,产生纠正脉冲,并驱动马达正向或反向转动,使齿轮组的输出位置与期望值相符(此时纠正脉冲趋于助,从而达到使伺服马达精确定位的目的。
这就是伺服马达的工作原理那么如何控制舵机呢?下面将进行具体介绍。
标准的舵机有三条控制线,分别为:电源、地及控制(见图3.4)。
电源线与地线用于提供内部的直流马达及控制线路所需的能源,电压通常介于4V~6V之间。