永磁电机噪音基础
永磁电机pwm谐波噪音的原理和优化

永磁电机pwm谐波噪音的原理和优化永磁电机是一种高效、可靠且具有广泛应用的电动机。
然而,它也存在着一些问题,其中之一就是PWM(脉宽调制)谐波噪音。
本文将探讨永磁电机PWM谐波噪音的原理,并提出一些优化方法来减少噪音的产生。
我们来了解一下永磁电机的工作原理。
永磁电机通过电磁场与永磁场相互作用来产生转矩,从而驱动机械运动。
在永磁电机中,PWM 是一种常用的控制方法,通过改变电机输入电压的占空比来控制电机的转速和转矩。
然而,PWM控制会引入谐波噪音。
这是因为PWM信号是由一系列方波脉冲组成的,而方波信号包含了很多频率的谐波分量。
当这些谐波分量进入电机后,会引起磁场的不均匀分布,从而产生噪音。
为了优化永磁电机PWM谐波噪音,可以采取以下几个方法:1. 优化PWM调制方式:选择合适的PWM调制方式可以减少谐波噪音的产生。
一些研究表明,三角波调制相对于对称PWM调制可以降低噪音水平。
2. 优化PWM频率:增加PWM频率可以使噪音分布在更高的频率范围内,从而减少对人耳的听觉干扰。
然而,频率过高也会增加开关损耗,需要在频率和效率之间做出权衡。
3. 优化电机设计:通过改进电机的结构和材料,可以降低谐波噪音的产生。
例如,使用优质的磁铁材料和减小磁铁与铁芯之间的间隙可以改善磁场分布,从而减少噪音。
4. 优化控制算法:采用先进的控制算法可以降低谐波噪音的产生。
例如,使用空间矢量调制(SVM)控制算法可以减少谐波噪音的产生。
永磁电机PWM谐波噪音是由PWM信号引入的谐波分量导致的。
通过优化PWM调制方式、频率、电机设计和控制算法,可以有效减少谐波噪音的产生。
这将提高永磁电机的工作效率和舒适性,使其更加适用于各种应用场景。
永磁同步电机电磁振动噪声抑制方法综述
0摇 引摇 言
随着电气设备在各行各业的应用,电机噪声问
题越来越引起人们的关注,因此研究低噪声、高效率
噪方面近年来的研究进行梳理和分析,通过如何有
综 述
效地优化电机本体结构和减小磁致伸缩力对电机的
影响,为进一步开展抑制永磁同步电机的振动噪声
摇 72
收稿日期:2019 -01 -02 基金项目:国家自然科学基金项目(51577131) ;天津市高等学校 创新团队培养计划( TD13-5040) 资助
的相关研究工作,提供部分参考。
综摇 echnical
述 review
摇詪詪摇
詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪詪
摇 张
的节能电机是非常迫切和必要的。 永磁同步电机的
摇 噪声一般由三部分组成:空气动力性噪声、机械性噪
欣 声和电磁噪声[1-2] 。 永磁同步电机在高速运行过程
等
摇 中,空气动力学和机械噪声占主导地位;在中低速度
永 磁
运行下,电机发出的振动噪声的主要来源是电磁噪
同 步
声。 电磁噪声的大小与定子绕组磁势空间谐波,电
对引起电机振动噪声的径向力进行研究,通过 实验测得径向力波的阶次数越低,电机铁心的弯曲 形变程度就越大,振动噪声越大;并且电机定转子极 数越多,产生的噪声振动就越小。 此外,实验中发现 在同步电机运行期间,当所给激励频率与永磁同步电 机的转子和定子固有频率出现重合时,就会产生比较 大的振动噪声。 因此,要有效抑制电机的振动噪声, 可以采用降低激振力和改变固有频率两种方法[7] 。
永磁同步电动机振动与噪声特性研究

永磁同步电动机振动与噪声特性研究一、本文概述随着科技的不断进步和环保理念的日益深入人心,永磁同步电动机(PMSM)作为一种高效、环保的驱动方式,已在诸多领域得到了广泛应用。
然而,随着其使用范围的扩大,其振动与噪声问题也逐渐显现,成为了制约其进一步发展的关键因素。
因此,本文旨在深入研究永磁同步电动机的振动与噪声特性,以期为降低其振动与噪声、提高其运行稳定性和可靠性提供理论依据和技术支持。
本文将首先介绍永磁同步电动机的基本原理和结构特点,阐述其振动与噪声产生的机理。
在此基础上,通过理论分析和实验研究相结合的方法,研究永磁同步电动机在不同工况下的振动与噪声特性,探讨其影响因素和变化规律。
本文还将对永磁同步电动机的振动与噪声抑制技术进行研究,提出有效的抑制方法和措施。
本文的研究内容不仅对于提高永磁同步电动机的性能和可靠性具有重要意义,而且对于推动永磁同步电动机的广泛应用和产业发展也具有积极的促进作用。
因此,本文的研究具有重要的理论价值和实践意义。
二、永磁同步电动机的基本原理与结构永磁同步电动机(PMSM)是一种高效、高性能的电动机,广泛应用于电动汽车、风力发电、工业机器人和精密机床等领域。
其基本原理和结构决定了其在振动和噪声特性上的表现。
永磁同步电动机的基本原理基于电磁感应和磁场相互作用。
它利用永磁体产生恒定磁场,作为励磁源,通过控制定子电流的相位和幅值,使定子磁场与转子磁场保持同步旋转。
当定子电流产生的旋转磁场与转子永磁体磁场相互作用时,会产生电磁转矩,驱动电动机旋转。
永磁同步电动机的结构主要由定子、转子和端盖等部件组成。
定子由铁心和绕组组成,铁心用于固定绕组并提供磁路,绕组则通过电流产生旋转磁场。
转子则主要由永磁体和铁心组成,永磁体提供恒定磁场,铁心则用于增强磁场强度。
端盖则用于固定定子和转子,并提供机械支撑。
在PMSM中,永磁体的使用是关键。
永磁体具有高矫顽力、高剩磁和高磁能积等特点,能够提供稳定的磁场,从而提高电动机的效率和性能。
电机机械振动噪声的控制与改善
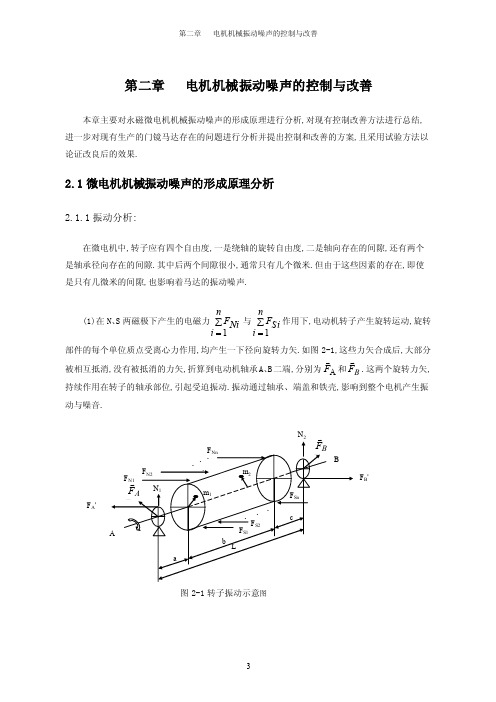
第二章 电机机械振动噪声的控制与改善本章主要对永磁微电机机械振动噪声的形成原理进行分析,对现有控制改善方法进行总结,进一步对现有生产的门镜马达存在的问题进行分析并提出控制和改善的方案,且采用试验方法以论证改良后的效果.2.1微电机机械振动噪声的形成原理分析2.1.1振动分析:在微电机中,转子应有四个自由度,一是绕轴的旋转自由度,二是轴向存在的间隙,还有两个是轴承径向存在的间隙.其中后两个间隙很小,通常只有几个微米.但由于这些因素的存在,即使是只有几微米的间隙,也影响着马达的振动噪声.(1)在N 、S 两磁极下产生的电磁力∑=n i Ni F 1与∑=n i Si F 1作用下,电动机转子产生旋转运动,旋转部件的每个单位质点受离心力作用,均产生一下径向旋转力矢.如图2-1,这些力矢合成后,大部分被相互抵消,没有被抵消的力矢,折算到电动机轴承A 、B 二端,分别为A F 和B F .这两个旋转力矢,持续作用在转子的轴承部位,引起受迫振动.振动通过轴承、端盖和铁壳,影响到整个电机产生振动与噪音.NF A ' F B ' 图2-1转子振动示意图(2)在马达内,电枢在轴向有一定的活动空间即间隙d,如图2-2所示,当电枢在旋转时,如电枢在该间隙内来回窜动,则会对轴承形成撞击,再传递到铁壳和端盖向外发出振动噪声.当马达内的垫圈以及定位圈的表面不平整,垂直度差时,以及磁场中心线设计不当时均易造成电枢窜动.(3)对马达两端轴承内孔而言,与电枢轴配合有一定的间隙,电枢在高速旋转时,由于电枢本身必定有一定的失平衡存在,且由于转子所受各种不同的电磁径向力,转子与轴承一动一静,两者间产生摩擦甚至是碰撞,严重时出现混沌运动,表现为复杂的震动,加重马达噪声.轴承与轴间的间隙配合情形可分为两种,一种为同心度差形成了轴向倾斜, 如图2-3,另一种为径向的碰摩,如图2-4.(4)电刷片振动分析:当电刷在换向器上高速滑动时,由于换向器表面并不十分光滑,而且换向片间存在槽隙,换向片间也存在跳动,故造成电刷的径向振动而产生噪声.其中换向器的圆度和片间跳动是影响噪声的关键因素.图2-3 轴孔配合示意图一图2-4 轴孔配合示意图二2.1.2影响机械振动噪声的原因:(1)转子不平衡产生振动;(2)转子产生轴向窜动;(3)电刷变形及换向器表面有伤痕引致转子受力不均;电刷压力不适;(4)轴与轴承摩擦产生噪声;(5)机壳端盖轴承加工精度差,中孔同轴度超差;(6)部件共振;(7)润滑油的影响;(8)操作工装的影响.(9)操作工人素质的影响2.2机械振动噪声的抑制和改善措施:在当前,对永磁直流微电机的振动噪声研究的结果,参见文献[1]、[2]、[3]、 [4],一般来说主要是控制以下几个方面的因素.(1)通过动平衡工艺,消除转子上不平衡的质量,将其有害振动压制在一定范围内.(2)控制转子在磁钢的位置,应保证轴向磁推力(或拉力)合适,并防止转子轴向窜动.(3)保证电刷无变形.增加适当的避震胶在电刷片上.(4)控制机壳与端盖轴承同心度,应严格于0.02mm以下,表面光滑无毛刺.轴承与机壳的同轴度控制在0.05mm以内.(5)当在轴承压入机壳和湍盖时,采用一根尺寸精度高的硬质合金芯轴,先把轴承套在芯轴上,然后再压进机壳或端盖的轴承室中.组合后会有一个较理想的间隙,且轴承内圈较平整.(6)提高支承转子的机壳和端盖的倔强强度,如加厚机壳和端盖的壁等.(7)含油滑动轴承含油量为18%以上.(8)改善提高总装工具的工序能力.(9)加强提高操作工人的技术水平和品质意识.2.3门镜马达机械振动噪声的分析和采取的抑制改善方法对于本文作者所在的德昌公司生产的门镜马达而言,马达噪声是目前要改善的重要项目.一些型号噪声制程能力(capability)的不足,已极大地影响了客户信心和马的生产.因此,需专门针对门镜马达的振动噪声作进一步的分析探讨,提出抑制改善方法.2.3.1门镜马达振动噪声的分析探讨在现有生产的门镜马达中,一些型号的噪声制程不足,受到了客户的投诉.对生产的取样及客户投诉的样板进行比较分析发现,这些马达噪声包含多种情况.一是马达运转时声音太大,dB(A)值超过规格;二是异常的声音,虽然此时运转声不大, dB(A)值未超过规格,但引致人耳听时感觉马达运转时声音较差,即声品较差,其中一种异常的杂声主要是电枢在马达内来回窜动撞击轴承引起的.因此对于门镜马达的噪声主要可以划分为两种情况,一种是声音大,另一种是存在不纯的杂声.其中以第二种尤为严重.主要是要对第二种情况进行改善.2.3.2电枢失平衡的关键因素及改善控制方法:在现有的门镜马达电枢结构中,芯片为三辨.电枢的失平衡会造成马达在运转时轴与轴承内孔的摩擦加剧产生碰摩,进而产生噪声.由电枢结构性决定它主要影响着1倍频、3倍频等低频段的强度.要降低马达的噪声,就须控制电枢的失平衡量.比较发现,影响电枢失平衡的主要因素主要集中在以下几个因素中:a)冲芯片时芯片本身引致的失平衡;b)电枢绕线时的排线;c)加焊圆形压敏电阻时引致的失平衡.1)对芯片厚度不均影响的改善:现生产的门镜马达均采用0.5mm厚硅钢片材料,铁芯厚度为5.930.050.0+-mm.在芯片生产工艺中,采用的是高速冲床,每一片芯片相对位置是不变的.当来料厚度出现偏差时,一般是来料中间部份厚度均匀,两边变薄,存在一定坡度,厚度变化有一定的规律性.受这些因素的影响,冲芯叠加时铁芯同样会出现在某一方位上出现厚薄,从而引致铁芯失平衡.如采用扭片的工艺,则可将芯片中失平衡质点分散在不同圆周角上.如图2-5所示,将芯片相互之间转动一瓣,即120度,由此可使原来处于相同位置的失平衡质点相互之间错开120度空间位置,每3次则形成一周,相互抵消,在一定基础上使质心回归中心位置,在一定程序上减少铁芯的失衡量.图2-5 扭片平衡示意图在现有的生产中,对于整个电枢而言,如采取每一芯片相互之间转动120度,则需转动18次,那对生产的效率将有较大影响.为提高效率,生产中原本采用每次扭转2片,现有更改为采用每次扭4片.通过研究电枢的总芯片数与扭片次数的关系,以及抵消失平衡的原理,可发现如下的关系:表2-1由此可以看出,采用单次扭转1,2,3,6片时,最终未中和抵消的片数均为0片,而单次扭转为4片时,未中和抵消的片数达到2至4片,单次扭转为5片时,未中和抵消的片数达到3片.由此看来在同样的效果中,采用单次扭转6片时,生产效率最高.采用试验测量单次扭转2、4、6片时的失平衡数作比较:型号:10918马达; 失平衡量测试机:HOEMANN HP7实验时采用同一条芯片来料进行扭片,其中单次扭片2片和4片采用扭片机进行,由于没有6片扭片机,故采用人手扭片代替。
超高速永磁同步电机振动噪声分析
超高速永磁同步电机在运行过程中可能会产生振动和噪声,这对电机的性能和稳定性都会产生影响。
进行振动噪声分析可以帮助找出问题并采取相应的措施进行改进。
以下是针对超高速永磁同步电机振动噪声的分析方法:
振动分析:
1. 频谱分析:
-使用加速度传感器等装置对电机进行振动信号采集。
-将振动信号转换为频谱图,分析频谱图可以确定振动的主要频率和幅值。
2. 模态分析:
-进行模态测试,确定电机结构的固有频率和振动模态。
-分析模态测试结果,找出可能引起振动的结构问题。
3. 有限元分析:
-利用有限元分析软件建立电机的有限元模型,进行振动模态分析。
-通过有限元分析,可以预测电机在不同工况下的振动响应。
噪声分析:
1. 声压级测试:
-使用声压级计对电机运行时产生的噪声进行测试和记录。
-分析不同频率下的声压级数据,找出噪声的主要来源。
2. 声学特性分析:
-进行声学特性测试,了解电机内部和外部的声音传播路径。
-分析声学特性,找出影响噪声传播和放大的因素。
3. 噪声源识别:
-通过分析振动和噪声的关联性,识别可能引起噪声的振动源。
-对噪声源进行定位和评估,制定相应的噪声控制策略。
通过以上的振动和噪声分析,可以全面了解超高速永磁同步电机在运行时产生的振动和噪声情况,找出问题的根源并制定相应的改进方案。
有效的振动噪声控制措施可以提高电机的运行稳定性和可靠性,减少对周围环境和人员的影响,从而提升电机的整体性能。
车用永磁同步电机振动噪声研究概述
10.16638/ki.1671-7988.2019.16.095车用永磁同步电机振动噪声研究概述刘鹏,杨季旺,杜宪峰(辽宁工业大学,辽宁锦州121000)摘要:永磁同步电机(PMSM)具有易控制、环保节能等优势,从而被广泛的应用于电动汽车。
文章的目的在于总结永磁同步电机振动噪声的现有研究方法,探索造成电车PMSM振动噪声的主要原因和影响阐述现阶段人们总结出的减振降噪的优化方案,为后续解决永磁同步电机振动噪声影响奠定基础。
关键字:永磁同步电机;减振降噪中图分类号:TB533 文献标识码:A 文章编号:1671-7988(2019)16-261-03Overview Of Vibration And Noise Research Of Permanent Magnet SynchronousMotors For VehiclesLiu Peng, Yang Jiwang, Du Xianfeng( Liaoning University of Technology, Liaoning Jinzhou 121000 )Abstract: Permanent Magnet Synchronous Motor (PMSM) has the advantages of easy control, environmental protection and energy saving, and has been widely used in electric vehicles. The purpose of this paper is to summarize the existing research methods of vibration and noise of permanent magnet synchronous motor, to explore the main cause and influence of vibration and noise of tram PMSM. Explain the optimization scheme of vibration and noise reduction summarized by people at this stage, and solve the permanent magnet synchronous motor for follow-up the vibration noise effect lay the foundation.Keywords: Permanent magnet synchronous motor; Vibration and noise reductionCLC NO.: TB533 Document Code: A Article ID: 1671-7988(2019)16-261-03引言永磁同步电机具有发热小,功率效率高,噪声低等特点,极限转速和制动特性也比较优良,是以被作为优选广泛应用于泵,风扇和电动车等。
永磁同步电机高频振动与噪声研究
永磁同步电机高频振动与噪声研究一、概述永磁同步电机以其高效率、高功率密度及优秀的控制性能,在电动汽车、风力发电、工业驱动等领域得到了广泛应用。
随着电机运行频率的提高,高频振动与噪声问题日益凸显,成为制约永磁同步电机进一步发展的关键因素。
对永磁同步电机高频振动与噪声的研究具有重要的理论价值和实际意义。
高频振动主要来源于电机内部的电磁力波动、机械结构共振以及材料特性等因素。
这些振动不仅影响电机的稳定运行,还可能导致电机部件的疲劳损坏,降低电机的使用寿命。
同时,高频振动还会引发噪声污染,对人们的生产和生活环境造成不良影响。
针对永磁同步电机高频振动与噪声问题,国内外学者进行了大量的研究。
研究内容包括但不限于电机电磁设计优化、结构动力学分析、振动噪声测试与评估等方面。
通过改进电机电磁设计,优化绕组分布和磁极形状,可以有效降低电磁力波动,从而减少高频振动。
通过结构动力学分析,可以识别出电机的共振频率,进而采取相应的措施避免共振现象的发生。
目前对于永磁同步电机高频振动与噪声的研究仍面临一些挑战。
一方面,电机内部的电磁场和机械结构相互耦合,使得振动与噪声的产生机制复杂多样,难以准确描述和预测。
另一方面,随着电机技术的不断发展,新型材料和先进制造工艺的应用使得电机的振动噪声特性也发生了变化,需要不断更新和完善研究方法和手段。
本文旨在深入研究永磁同步电机高频振动与噪声的产生机理和影响因素,提出有效的抑制措施和优化方案,为永磁同步电机的设计、制造和运行提供理论支持和实践指导。
1. 永磁同步电机概述永磁同步电机,作为电动机和发电机的一种重要类型,以其独特的优势在现代工业中占据着举足轻重的地位。
其核心特点在于利用永磁体来建立励磁磁场,从而实现能量的高效转换。
定子产生旋转磁场,而转子则采用永磁材料制成,这种结构使得永磁同步电机在运行时能够保持稳定的磁场分布,进而实现平稳且高效的能量转换。
永磁同步电机可以分为他励电机和自励电机两种类型,前者从其他电源获得励磁电流,后者则从电机本身获取。
自启动永磁同步电动机负载运行时噪音大89分贝
自启动永磁同步电动机负载运行时噪音大89分贝
我见过很多的空载无电磁声,负载有电磁声的电机。
所以你的第三条结论肯定是错的;
为什么错了,请你自己分析一下吧。
1、正常情况下,电机在空载运行时,励磁电流、主极磁场的关系已经形成,如果电磁关系有问题,这时候就有电磁噪声表现出来;2、正常情况下,电机空载运行没问题,负载运行也不会有电磁噪声的问题,因为负载电流的磁势与转子磁势相互平衡,电机主旋转磁场不变,所以负载时,也不会发生电磁噪声;
1、我们先从电机叫声中感觉一下电磁噪声产生的情况:1)当电机却相启动、运行时,有强烈的电磁噪声;2)如果你把Y接的电机,接成△,会有强烈的电磁叫声;3)如果你把△接的电机,接成Y,不会有电磁叫声;4)当电机严重过载时,会有电磁叫声;
2、我说的是正常情况下,空载没有电磁噪声,负载就不会有电磁噪声;
3、但是,如果你设计制造的电机,不合格,也会出现空载是好的,负载运行时会有电磁噪声的情况,例如:如果你把△接的电机,接成Y,不会有电磁叫声,但额定负载运行时就会有噪声;
4、也就是说,当你的电机设计出了问题,负载时,电流大,绕组压降大,直接破坏了原有的电磁关系而产生电磁叫声;
5、从楼主的问题看,完全是永磁退磁的缘故,负载时由于永磁退磁,功角大,甚至失步,出现电磁噪声;
6、如果负载时,电磁关系不能满足,就会出现电磁叫声,这是设计制造的不合格电机的缘故!。
某款电动汽车驱动用永磁同步电机噪声分析
某款电动汽车驱动用永磁同步电机噪声分析电动汽车的噪声问题一直是业内关注的焦点之一,特别是驱动用的永
磁同步电机噪声问题更是备受关注。
本文将从不同角度对款电动汽车驱动
用永磁同步电机噪声进行分析。
首先,了解永磁同步电机的工作原理是分析噪声问题的基础。
永磁同
步电机是利用永磁体产生的磁场与电机中的线圈磁场相互作用,从而实现
转动的电机。
在工作过程中,电机的运动不可避免地产生一定的噪声。
主
要噪声源可以归纳为电机的机械振动、电磁振动以及空气噪声。
第三,电磁振动也是永磁同步电机噪声的重要因素。
电磁振动是由电
机中的电流和磁场相互作用而产生的振动。
电流的变化会导致磁场的变化,进而引起电机部分组件的振动和噪声。
减小电机中的电流涟漪和磁场的不
均匀性可以有效减少电磁振动和噪声。
最后,空气噪声是由电机周围空气流动引起的。
在电机工作时,转子
的旋转会产生气流,同时由于电机的结构会形成或者改变气流,进而产生
空气的噪声。
为了减小空气噪声,可以优化电机的风道结构和减少电机表
面的锐利边缘,从而减小空气流动引起的噪声。
综上所述,款电动汽车驱动用的永磁同步电机的噪声主要包括机械振动、电磁振动和空气噪声。
为了减小噪声,可以从减小间隙、提高转子与
定子的匹配度、降低电流涟漪和磁场的不均匀性、优化风道结构以及减少
锐利边缘等方面入手。
此外,通过噪声传导路径的隔离和吸声材料的应用
等也可以有效降低噪声。
永磁同步电机振动噪声的分析与结构优化
摘要永磁同步电机具有结构简单、功率密度大、效率高等优势,在空间和能源有限的自主式水下航行器中得到了广泛应用。
永磁同步电机在运行过程中会产生径向电磁力和齿槽转矩,这些激励作用于电机结构,将引起电机的振动,向外辐射噪声,影响电机稳定运行和航行器的隐身性能。
本文以某自主式水下航行器配备的推进用永磁同步电机为研究对象,围绕电机振动分析和优化,分别建立了永磁同步电机的电磁场模型、结构模型以及瞬态动力学耦合模型,从解析、仿真和实验的层面,对电机进行了如下研究:首先,分析了永磁同步电机电磁激励的分布规律。
通过解析,推导出电磁力波的阶数与频率;建立了永磁同步电机的电磁有限元仿真模型,计算得到了电磁场的时空分布,经过傅里叶分解,得到了电磁力的频域特征。
给出了齿槽转矩的解析式,并进行了数值仿真,分析了齿槽转矩的分布规律。
其次,研究了永磁同步电机定子系统的模态特性。
通过机电类比法,推导出电机定子系统固有频率的解析式;建立了电机定子系统的有限元模型,对其固有频率和振型进行了仿真分析。
采用运行模态试验方法,搭建实验平台,完成了永磁同步电机的模态测试,辨识出电机定子系统的固有频率。
再次,研究了永磁同步电机的振动响应。
关联电磁场与结构场,建立耦合模型,把电磁激励加载至定子系统,得到了电机壳体上一点振动的响应特性,对其进行傅里叶分解,得到了振动的频域分布。
搭建实验平台,测取了两种工况下电机壳体表面的振动响应,验证了上述分析方法的正确性。
最后,开展了永磁同步电机的减振优化设计。
分别从降低电磁激励和调整结构模态的角度出发,选取了若干结构参数,分析了它们对于振动的影响,以此为基础对电机进行了优化。
优化后,经仿真计算,电机的振动幅值得到了降低。
关键词:永磁同步电机;电磁激励;模态;振动响应;AUVVibration Analysis and Structure Optimization ofPermanent Magnet Synchronous MotorAbstractPMSM(Permanent magnetic synchronous motor )has a simple structure with high power density and efficiency. Due to these advantages, PMSM has been applied to AUV, which has limited space and energy supply. However, its inherent characteristic would introduce radial electromagnetic force and cogging torque. The vibration caused by these stimulations becomes the origin of noise, which will do harm to the stability of the motor and AUV’s stealth performance.This dissertation studies onthe vibration and optimization of a PMSM equipped on an AUV. Focusing on vibration and optimization of the PMSM, multiphysics fields are built, including electromagnetic field, structure field andcoupled transient-structure field, from the perspective of analysis, simulation and experiment. The main content of the paper is shown as follows:Firstly, the electromagnetic stimulation which causes vibration of the PMSM is analyzed. Orders and frequencies of theelectromagnetic force are calculated using analytical method. FEAmodel is established to obtain further information about the magnetic field’s distribution spanning in time and space. FFT is performed to acquire the magnetic field’s distribution in frequency domain. The cogging torque is also analyzed and simulated.Then, the dissertation focuses on the modal analysis of the stator from the mechanism perspective. Electromechanical analogy is utilized to acquire the analysis formula for the natural frequencies of the stator system. Simulation is then conducted to obtain the accurate value of the natural frequencies and modal shapes. OMA is performed to identify modal parameters experimentally.Thirdly, vibration response is studied. The coupledmodel between the electromagnetic field and the structure field is established. The electromagnetic stimulation is loaded onto the stator system to get time-domain response of a point. The result is then transferred by FFT to frequency domain. Vibration amplitudes under different working conditionsare measured by experiment to validate the previous methodology.At last, a method intended to reduce vibration is performed. In order to reduce the stimulation amplitudes and adjust the natural frequency, effects of several structural parametersare studied. Based on the previous analysis, the simulation result shows that the motor after optimization has lower vibration level.Key words: PMSM; Electromagnetic Stimulation; Modal; Vibration Response; AUV目 录摘要 (I)Abstract (I)第一章绪论................................................................................................................. - 1 -1.1研究背景......................................................................................................... - 1 -1.2国内外研究现状............................................................................................. - 2 -1.2.1电磁激励的研究.................................................................................. - 2 -1.2.2结构模态特性的研究.......................................................................... - 3 -1.2.3电磁激励下振动响应的研究.............................................................. - 4 -1.3研究内容......................................................................................................... - 5 -第二章永磁同步电机电磁激励分析......................................................................... - 7 -2.1引言................................................................................................................. - 7 -2.2径向电磁力..................................................................................................... - 7 -2.2.1径向电磁力的解析计算...................................................................... - 7 -2.2.2磁场分布及径向电磁力的仿真分析................................................ - 10 -2.2.3变频供电下的振动激励.................................................................... - 15 -2.3齿槽转矩....................................................................................................... - 17 -2.3.1齿槽转矩的解析计算........................................................................ - 17 -2.3.2齿槽转矩的仿真计算........................................................................ - 19 -2.4本章小结....................................................................................................... - 20 -第三章永磁同步电机定子结构模态分析............................................................... - 21 -3.1引言............................................................................................................... - 21 -3.2定子系统的双环模型................................................................................... - 21 -3.2.1机电类比法........................................................................................ - 21 -3.2.2双环模型............................................................................................ - 22 -3.3结构模态的有限元仿真............................................................................... - 25 -3.3.1定子铁芯的模态分析........................................................................ - 25 -3.3.2绕组对定子铁心模态的影响............................................................ - 27 -3.3.3定子系统的模态................................................................................ - 29 -3.4永磁同步电机的模态实验........................................................................... - 31 -3.4.1自互谱法的基本原理........................................................................ - 32 -3.4.2永磁同步电机的运行模态实验........................................................ - 33 -3.5本章小结....................................................................................................... - 36 -第四章电磁激励作用下的振动响应....................................................................... - 37 -4.1振动响应的解析计算................................................................................... - 37 -4.2电磁力作用下的振动响应........................................................................... - 37 -4.3齿槽转矩作用下的振动响应....................................................................... - 39 -4.4 永磁同步电机振动响应的实验验证.......................................................... - 40 -4.4.1 两种电磁激励下的振动响应........................................................... - 40 -4.4.2 齿槽转矩作用下的振动响应........................................................... - 43 -4.5本章小结....................................................................................................... - 44 -第五章永磁同步电机减振优化设计....................................................................... - 45 -5.1引言............................................................................................................... - 45 -5.2电磁激励的优化........................................................................................... - 45 -5.2.1设计变量的确立................................................................................ - 45 -5.2.2齿顶弧偏移对于电磁激励的影响.................................................... - 46 -5.3定子模态优化............................................................................................... - 47 -5.3.1优化目标的确立................................................................................ - 47 -5.3.2设计变量的选择................................................................................ - 48 -5.3.3基于响应面法的定子模态优化........................................................ - 49 -5.4优化后的振动响应....................................................................................... - 52 -5.5本章小结....................................................................................................... - 53 -第六章总结与展望................................................................................................... - 54 -6.1总结............................................................................................................... - 54 -6.2展望............................................................................................................... - 54 -参考文献............................................................................................................... - 56 -攻读学位期间发表学术论文情况............................................................................. - 58 -致谢..................................................................................................................... - 59 -中国运载火箭技术研究院学位论文版权使用授权书............................................. - 60 -第一章绪论1.1研究背景本课题来源于某自主式水下航行器电推进装置项目。
永磁直流电动机振动和噪声分析
曲和横 向振 动 。设 计 上 采用 非 均 匀 气 隙 、 电枢斜 槽 等 , 是 减少 磁 通 振 荡 和 振 动 电磁 力 的有 效措 施 。 都
() 2 气隙 的不 均 匀 。由 于装 配气 隙不 均 匀 , 电动 机 运 行 时产生 单边 磁拉 力 , 作 用 相 当 于 电动 机 转轴 其
! 节 省 了材 料并 减小 了 电动机体 积 。但在永 磁材 料应 用 中还存 在一 些 问题 , 电动 机 噪 声 、 动增 大 等 , 如 振
因此 , 决这些关 键 问题尤 为 重要 。 解 我 们 首 先 要 判 别 电动 机 的振 动 由何 原 因引 起 的, 即电磁 和机 械 原 因判 定 。 区分 是 电磁 原 因还 是 机械 原 因产 生 的方 法 是将 电动 机 运 转 至最 高 转 速 ,
苗uⅡv o .
.. . ~ … …
薹
… … …
,
… …
钼『 ● 妊 聿 铎 盆 嘘 吐
… … … … … … … … … … … … … … … … … … 一
.
苎
… 28蔓. . …O !…. O. 塑 …主
永磁 直 流 电动机 振 动 和 噪声 分 析
严 自新
( 坛 市 微 特 电 机 有 限 公 司 , 苏 常州 2 30 ) 金 江 120
Ab t a t T eman r a o n eb s o ui n o i mo in v b ain a d n i u ig t ep o u t n p o e sw r sr c : h i e s n a d t a i s l t ft s t i r t n os d r r d ci r c s e e h c o h o o e n h o
永磁同步电机的振动与噪音解析
理想次数
二、定位力矩
啸叫
大电机噪音与电流波形 噪音频率为电流频率的18倍 机械转速的180次
第16页/共31页
理想次数
三、方波无刷直流电机力矩波动与噪音
波动力矩 波动力矩—指令一定下不同转角对应的电磁力矩波动分量 引起的原因:电动势e和电流 i 的波形偏离了理想波形
Tr
1
ei
T
第17页/共31页
❖存在幅值偏差Δi
Tr
2 i sin 2
3
--υ=2P
❖ 存在相位偏差Δθ
Tr
2 i cos 2
3
--υ=2P
❖ 存在恒定成分ΔI
Tr I sin --υ=P
存在 次谐波成分i
Tr icos( 1)
第23页/共31页
五、抑制措施
电机本体
定位力矩 优化电机系统固有频率
控制器
力矩波动
方波驱动器 正弦波驱动器
第6页/共31页
一、振动与噪音机理
合成磁动势:
F (,t) Fs cos[p(1 ) 1t] Frk cos[kp(0 t)]
k
气隙磁密: B (,t) F / S
单位面积力: B2 (,t) 20
N, cos( t) ,
第7页/共31页
一、振动与噪音机理
一、不随时间变化的恒定力波,即零次力波。恒定力波只是对定 子铁心产生静压力时铁心产生静变形,不产生振动和噪音; 二、定子磁动势同次谐波,力波角频率为2ηω1; 三、转子磁动势同次谐波,力波角频率为2kω1; 四、定子磁动势不同次谐波,力波角频率为(ηi±ηj)ω1 ; 五、转子磁动势不同次谐波力波,角频率为(ki±kj)ω1 ; 六、定、转子磁动势不同次谐波力波,角频率为(ηi±kj)ω1; 七、定、转子磁动势同次谐波力波,角频率为2ηiω1;
永磁同步电机的振动与噪音
正弦波驱动
五、抑制措施
空载
9Nm
交流永磁同步电机理论-§9 永磁同步电机的振动与噪音
五、抑制措施 正弦波驱动器的抑制措施
磁场正弦化设计(不均匀气隙) 保证位置传感正弦化精度 电流反馈 提高电路的线性
交流永磁同步电机理论-§9 永磁同步电机的振动与噪音
6 8 1.0 1.2
Tem/(N.m)
0 24
0
72
144
216
288
360
电角度/(°)
力矩波动仿真图
交流永磁同步电机理论-§9 永磁同步电机的振动与噪音
三、方波无刷直流电机力矩波动与噪音
振动
大电机噪音与电流波形 –120rpm,10Nm 噪音频率为电流频率的6倍
f=120Hz
交流永磁同步电机理论-§9 永磁同步电机的振动与噪音
式中 T e0 m 2 3 m [E m 1 Im 1 E m 5 Im 5 E m 7 Im 7 E m 1Im 1 1 1 ]
T e6 m 2 3 m [ I m 1 ( E m 7 E m 5 ) I m 5 ( E m 1 1 E m 1 ) I m 7 ( E m 1 3 E m 1 ) ]
三、方波无刷直流电机力矩波动与噪音
波动力矩 波动力矩—指令一定下不同转角对应的电磁力矩波动分量 引起的原因:电动势e和电流 i 的波形偏离了理想波形
Tr 1 eiT
交流永磁同步电机理论-§9 永磁同步电机的振动与噪音
三、方波无刷直流电机力矩波动与噪音
e a ( t ) ~ E m 1 s t i E m 3 s n 3 t i E m 5 s n 5 t i E m 7 s n 7 t i n
永磁电机噪音基础
❖ 因此分析永磁电机的电磁振动和噪声,主要是分析气隙的径向电磁 力波和定子的径向固有振动特性。
0 0
180 1
~36 0 0
600 ~18
0 0
180 1
~36 0 0
600 ~18
0 0
180 1
~36 0 0
振动等级
振动速度有效值/(mm·s-1)
N
1.8
2.8
4.5
2.8
R
0.71 1.12 1.12 1.8 1.8 2.8 1.12 1.8
S
0.45 0.71 0.71 1.12 1.12 1.8 0.71 1.12
❖ 声强级:在某一指定方向上的给定声强与参考声强之比的以10为底的 对数乘以10。
L I 1l0 g II01l0 gp p r 2 0m s2(0lp g rm 2 s.3)5
❖ 声功率级:声功率与基准声功率之比的以10为底的对数乘以10。
LW
10lg W W0
3 、噪声的频谱
正常人能听觉到的声音的频率范围一般为20~20000Hz,这一宽 广的声频范围可划分为若干个频段,即通常所说的频程或频带。
37kW<P≤55kW
90
93
94
97
97
99ቤተ መጻሕፍቲ ባይዱ
98
102
101
105
103
106
55kW<P≤110kW
94
96
211104886_Halbach结构永磁电机的电磁振动与噪声分析
电气传动2023年第53卷第4期ELECTRIC DRIVE 2023Vol.53No.4摘要:针对转子为Halbach 结构的永磁电机进行额定功率下的电磁振动和噪声分析,建立了永磁电机径向力波的解析表达式,并分析了引起振动和噪声的两类主要力波,通过解析法确定了电机的主要噪声源。
为了表征Halbach 结构电机的电机特点及其振动噪声性能,比较了Halbach 结构和普通径向充磁结构的两台电机,针对这两台电机分别进行气隙磁密的分析,以及振动和噪声的比较。
对比分析结果表明,Halbach 结构的永磁电机转子轭部更薄,重量更轻,气隙磁密正弦度更高。
但由于径向气隙磁密3次谐波含量的不同,Halbach 结构永磁电机的主要激振频率下的振动加速度幅值相比传统径向充磁结构的永磁电机高出9.56%,总声压级高出0.65dB 。
分析结果为机泵一体化装备的电机选择和设计提供了研究基础。
关键词:Halbach 结构充磁;传统径向充磁;永磁同步电机;振动;噪声中图分类号:TM351文献标识码:ADOI :10.19457/j.1001-2095.dqcd23510Electromagnetic Vibration and Noise Analysis of Halbach Permanent Magnet MotorLU Xihao ,QIAO Mingzhong ,ZHANG Chi(College of Electrical Engineering ,Naval Engineering University ,Wuhan 430000,Hubei ,China )Abstract:In view of the electromagnetic vibration and noise analysis of permanent magnet motor with Halbach structure at rated power ,the analytical expression of radial force wave of permanent magnet motor was established ,and two kinds of main force waves which cause vibration and noise were analyzed.The main noise sources of the motor were determined by analytic method.In order to characterize the motor characteristics of the Halbach structure motor and its vibration and noise performance ,two motors of Halbach structure and common radial magnetization structure were compared.For these two motors ,the analysis of the air gap flux density and the comparison of vibration and noise were carried out.The comparative analysis results show that the permanent magnet motor rotor yoke of Halbach structure is thinner ,lighter ,and the air gap flux density is more sinusoidal.However ,due to the different third harmonic content of radial air gap flux density ,the vibration acceleration amplitude under main excitation frequency of Halbach permanent magnet motor are 9.56%higher than those of traditional radial magnetization permanent magnet motor ,and the total sound pressure level is 0.65dB higher.The analysis results provide a research foundation for the selection and design of the motor of the integrated pump-mechanical equipment.Key words:Halbach structure magnetization ;traditional radial magnetization ;permanent magnet synchronous motor ;vibration ;noise基金项目:国家自然科学基金(51877212)作者简介:卢希浩(1997—),男,硕士,Email :*****************通讯作者:乔鸣忠(1971—),男,博士,教授,Email :*********************Halbach 结构永磁电机的电磁振动与噪声分析卢希浩,乔鸣忠,张弛(海军工程大学电气工程学院,湖北武汉430000)液体泵是舰艇上的重要设备,现有的液体泵都是采用传统结构,电机通过传动轴带动泵叶转动,将液体输送出去。
永磁电机pwm谐波噪音的原理和优化-概述说明以及解释
永磁电机pwm谐波噪音的原理和优化-概述说明以及解释1.引言1.1 概述概述:永磁电机作为一种高效、高性能的电机类型,在各个领域得到了广泛的应用。
然而,随着永磁电机在工业和家庭电器等领域的广泛应用,其谐波噪音问题也日益引起人们的关注。
永磁电机的PWM调制技术是一种常用的调速方法,然而在使用PWM调制时,会产生谐波噪音,给人们带来一定的困扰。
本文将介绍永磁电机的基本原理,以及PWM调制在永磁电机中的应用。
接着,我们将详细探讨PWM谐波噪音的原理,并提出一些优化方法。
通过对永磁电机PWM谐波噪音的研究,我们可以找到有效的优化措施,降低永磁电机在运行过程中产生的噪音,提高其工作效率和质量。
本文的目的是为读者深入了解永磁电机PWM谐波噪音产生的原理,同时提供一些针对性的优化方法。
通过对这一问题的研究,我们可以更好地应用永磁电机,减少谐波噪音带来的不利影响,提升永磁电机的工作效果和使用体验。
接下来,我们将详细介绍永磁电机的基本原理,以及PWM调制在其中的应用。
同时,我们还将深入探讨PWM谐波噪音的原理,并提出一些优化的方法。
希望本文能够对读者深入了解永磁电机PWM谐波噪音问题的原理和优化方法起到一定的帮助和指导作用。
1.2文章结构文章结构部分的内容可以写为:1.2 文章结构本文主要围绕永磁电机在PWM调制下产生的谐波噪音进行探讨。
首先,引言部分将对永磁电机和PWM调制进行简要概述,为读者提供必要的背景知识。
然后,在正文部分,我们将详细介绍永磁电机的基本原理以及PWM调制技术在永磁电机中的应用。
通过对这些内容的阐述,我们可以更好地理解永磁电机在PWM调制下产生的谐波噪音的原因和机制。
最后,在结论部分,我们将总结PWM谐波噪音的原理,并提出一些优化方法,以减少谐波噪音对永磁电机性能和使用环境的影响。
通过这样的文章结构,读者可以逐步了解永磁电机、PWM调制以及PWM谐波噪音的相关知识,并且能够了解优化PWM谐波噪音的方法。
永磁同步电机噪声阶次
永磁同步电机噪声阶次
永磁同步电机(PMSM)的噪声阶次是指电机运行过程中产生的噪音的频率成分与电机转速之间的关系。
具体来说,它是噪音频谱中出现的频率分量与电机转速之比的整数倍关系。
电机噪声阶次的计算公式为:n = 60f / P,其中n为阶次,f为噪声频率,P为电机极对数。
例如,如果电机的转速为6000 rpm,极对数为4,发出的噪声频率为400 Hz,那么电机噪声阶次就是:n = 60 ×400 / 4 = 6000。
需要注意的是,阶次通常是整数,因此在实际计算中可能需要对结果进行四舍五入或向上取整。
航空器用永磁直流发电机的噪音与振动控制研究

航空器用永磁直流发电机的噪音与振动控制研究近年来,永磁直流发电机在航空器领域得到了广泛应用。
其高效率、高功率密度和紧凑的结构使其成为航空器电力系统的理想选择。
然而,永磁直流发电机在运行过程中产生的噪音和振动问题一直是制约其发展的重要因素。
因此,对永磁直流发电机的噪音和振动进行研究和控制具有重要意义。
首先,我们需要了解永磁直流发电机噪音和振动的产生原因。
一是电磁力引起的振动和噪音。
在永磁直流发电机中,电流通过定子线圈和转子线圈产生磁场,磁场相互作用引起的电磁力产生振动和噪音。
二是电极间气隙噪音。
永磁直流发电机转子和定子之间的气隙会引起噪音。
三是机械传动噪音。
航空器永磁直流发电机通常与发动机或其他结构紧密连接,机械传动会引入噪音和振动。
针对这些问题,研究人员提出了一系列的噪音和振动控制方法。
首先是结构优化设计。
通过改变永磁直流发电机的结构和材料,减少振动和噪音的产生。
例如,采用复合材料制作转子结构,在提高强度的同时减小质量,降低噪音和振动。
其次,是采用减振措施。
通过增加减振材料、减振片等方式,吸收和隔离振动能量,减少振动和噪音的传播。
此外,还可以使用隔声材料对永磁直流发电机进行包裹,降低噪音的辐射。
再次,是控制电磁力的作用。
通过运用控制算法调整电磁力的分布,减小振动和噪音的产生。
最后,是优化电气系统的设计。
优化控制策略,减小电流和磁场的波动,降低振动和噪音水平。
永磁直流发电机噪音和振动的控制还面临着一些挑战。
首先是矛盾性目标的处理。
振动和噪音的控制往往与功率和效率之间存在矛盾关系,因此需要在满足噪音和振动控制的前提下,尽可能保持永磁直流发电机的高效率和高功率密度。
其次是系统集成的问题。
航空器用永磁直流发电机通常与其他系统和设备紧密结合,如发动机、航电系统等,因此需要考虑整个系统的协同工作,以实现综合噪音和振动的控制。
此外,噪音和振动的控制还需要综合考虑机械、电气、材料等多个学科的知识。
需要开展先进的建模和仿真研究,以指导设计和优化。
电动车永磁同步电机电磁噪声测试分析3

电动车永磁同步电机电磁噪声测试分析康强2019.09内容1.引言:电驱噪音的现状和目标2.电机噪音的测试和分析3.电磁激励源的分析4.改善方案和建议⏹车身+底盘:●车身结构分布变化、声学包分布变化●底盘刚度增加、轮胎抗冲击要求增加●风噪/路噪问题凸显⏹动力总成:●动力总成从传统内燃机更换为电驱动系统,总噪声值变小●电机表现出高频尖叫声●减速器齿轮啸叫明显●动总悬置高频隔振能力差⏹附件电动化:●发动机掩蔽效应消失●电动空调压缩机噪声显现●继电器异响●水泵/真空泵等子系统噪声突出电动车由于动力总成改变,进排气取消,新增动力电池模块……,NVH 有了明显变化:电动车车内噪声变小,是否NVH 得到了改善?—Traditional vehicle —Electric vehicle4dB A⏹500-4000Hz的啸叫噪音主要由减速器齿轮阶次贡献⏹5000Hz以上的啸叫噪音主要由电机极数的阶次贡献Feature①Feature③Feature②⏹特征①:电磁激励噪声,其噪声主阶次成分为电机的极数和槽数有关。
+=⏹特征②:PWM载波频率,与逆变器开关频率的控制策略有关,逆变器将高压直流电转变为交流电时产生该噪声成分。
⏹特征③:电机结构共振产生的噪声。
电机的电磁激励噪声(包括开关频率噪声)频率高达4kHz以上,而人耳对1k-6kHz噪声非常敏感,即使电机噪声幅值降低到35dB(A),仍然能被人耳感知到,从而引起抱怨。
更安静的电动车,对减速器NVH 有了更苛刻的要求:瞬间提速,瞬间大载荷NVH 重要度前移,更高的NVH 要求1st gear order2nd gear order大速比,高转速→ 齿轮阶次频率增大→ 齿轮变形风险增大相对于传统车,电动车的减速器齿轮传递更大的扭矩,更宽的工作转速范围,使得齿轮啮合啸叫噪声异常突出,并且更高的频率阶次也不容易被掩蔽。
8000.000.00HzDerived Frequency40.000.00d B (A )P a 1.000.00A m p l i t u d e30.0025.00F car1F car2F car3F car4F car5Fcar6☐最高频率至8000Hz ,车内电机阶次目标为低于30dB(A),人很难感觉到;☐全负荷工况电机本体噪音在额定转速处有一个拐点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
63(56~71)
125(110~140) 250(225~280) 500(450~560) 1000(900~1100)
80(71~90)
160(140~180) 310(280~355) 630(560~710) 1250(1100~1400)
1600(1600~1800) 2000(1800~2200) 2500(2200~2800) 3150(2800~3550) 4000(3550~4500) 5000(4500~5600)
5600~11200
8000
6300(5600~7100) 8000(7100~8900) 10000(8900~11200)
以频率为横坐标,以声压级、声强级、声功率级为纵坐标来绘制噪声测 量结果,所得图形可清楚反映出噪声的成分和性质,这就是频谱分析。
4 、响度级
用响度级把声压和频率统一起来表示声音响度的高低,其单位为 phon(方)。
I
W S
声功率级是一个定值,它不随距离而变化;而不同位置的测 点上的声压级值是不同的。
由于声强 I 从闻阀限到痛阀限相差 10^12 倍,所以与声压一样,声 强和声功率也用声强级和声功率级来表示。它们的单位都为 dB (分
贝)。取贝尔作为单位,取贝尔的十分之一作为响度的常用单位,称
为分贝尔(decibel),简称分贝(dB)。
97
99
98
102
101
105
103
106
55kW<P≤110kW
94
96
97
100
100
103
101
105
103
107
104
108
110kW<P≤220kW
97
99
100
103
103
106
103
108
105
109
106
110
220kW<P≤630kW
99
101
102
105
106
108
106
110
107
N
1.8
1 0 0
R S
0.71 0.45
1800
1.12 0.71
1.40
3600
4500
1000
2000
3000
4000
5000
6000
n[RPM] 7000
二、永磁电机的振动和噪声
(一)电磁振动和噪声 (二)电机定子和转子的固有振动特性
(三)机械振动和噪声
与其它类型电机振动一样,永磁电机噪声有三类:电磁振动噪声、机 械振动噪声和空气动力噪声。
响度级:根据听力正常的听音判断为等响的1000Hz纯音(来自正前方 的平面行波)的声压级。 响度级是这样确定的:取1000Hz的纯音作为基准声音,若出现某一 声音听起来与基准纯音一样响时,该声音的响度级(phon)就等于 基准纯音的声压级(dB)。
声音的响度级由其声压和频率决定,反映它们关系的图线叫等响线。 等响线相当于频率和声压级不同、但响度级相同的声音。
对于自由场(球形),r为测量点组成的球的半径
LW L pav 10lg A L pav 10lg 4r 2 L pav 20lg 11 A0
对于半自由场(半球形,中小电机噪声测量中常取该值)
LW L pav 10lg A L pav 10lg 2r 2 L pav 20lg 8 A0
振动速度有效值/(mm· s-1)
N
R S 0.71 0.45
1.8
1.12 0.71 1.12 0.71
2.8
1.8 1.12 1.8 1.12
4.5
2.8 1.8 1.12 0.71
2.8
1.8 1.12
伺服电机振动等级(振动速度)
振速[mm/s] 4 3.5 3 2.25 2 3.0 2.8 0.71 1.18 1.8 振动等级
111
107
112
630kW<P≤1100kW
101
103
105
108
108
111
108
112
109
112
109
114
注:Ⅰ类:无冷却风扇的开启式电机(IP22、IC00)或无外风扇的封闭式电机(IP44、IC0041)。 Ⅱ类:有冷却风扇的开启式电机(IP22、IC01)或有外风扇的封闭式电机(IP44、IC0141)。
p rms 1 T 2 p (t )dt 0 T
P0
对于纯音:
T
p rms
t
1 2
p max
一般声学仪器测量出的声压都为有效值prms,而不是瞬时值p,也不是
幅值pmax。
声压越大,声音越强;声压越小,声音越弱。因此用声压(prms)来衡 量声音的强弱。
正常人耳能听到的声音的声压(称闻阀声压)为2e-5Pa;能使人耳产
由上式式可见,声压级变化120dB,相当于声压变化1e+6倍。
2、声强级和声功率级
声功率:声源在单位时间内发射的总能量称为声功率,记为W,
单位为瓦(W)。
声强:在垂直于声波传播方向、单位时间内通过单位面积的声能 (声波平均能流密度的大小)称为声强,以I表示,单位W/m^2。
2 2 p rms p rms I Zc c
声强级:在某一指定方向上的给定声强与参考声强之比的以10为底的
对数乘以10。
2 prms I LI 10lg 10lg 20(lg p rms 2.35) I0 p0
声功率级:声功率与基准声功率之比的以10为底的对数乘以10。
LW 10 lg W W0
3 、噪声的频谱
正常人能听觉到的声音的频率范围一般为20~20000Hz,这一宽 广的声频范围可划分为若干个频段,即通常所说的频程或频带。 在噪声测量中最常用的是倍频程和1/3倍频程。
5dB 5dB 5dB N 低 R 低 S 低 E
如无其它规定,在空载时噪声限值应符合N级的要求。
类别 声功率级 电机功率 P≤1.1kW 1.1kW<P≤2.2kW 2.2kW<P≤5.5kW 5.5kW<P≤11kW 11kW<P≤22kW 转速
Ⅰ
Ⅱ
Ⅰ
Ⅱ
Ⅰ
Ⅱ
Ⅰ
Ⅱ
Ⅰ
Ⅱ
Ⅰ
Ⅱ
n<960 rpm 71 74 77 81 84 76 79 82 85 88
960≤n <1320 rpm 75 78 81 85 88 78 80 84 88 91
1320≤n<1900 rpm 78 81 85 88 91 80 83 87 91 95
1900≤n<2360 rpm 80 83 86 90 93 82 86 90 94 98
这个主观量与客观里量之间的幂函数关系,在人与外界刺激的知觉反 映中是普遍存在的。
(二)噪声的测量
常用的噪声测量仪器有声级计、频谱分析仪和自动记录仪等。 声级计是噪声测量中最常用和最简便的测试仪器。 声级计中常用的频率计权网络有A、B、C三种。 测量电机噪声时,一般都采用A计权网络,所测得的值称为A声级, 记作dB(A)。 电机噪声的测定方法:GB/T10069.1 《旋转电机噪音测定方法及限 值 第1部分:旋转电机噪声测定方法》 半自由场或半混响场中测定声级: GB/T3767或 GB/T3768
倍频程:指上、下两个频率值之比为2:1,即f上/f下=2的频带。 1/3倍频程:指把一个倍频程按
1 f上 23 f下
2 关系再分为三段频带,即
1 3
中心频率:指某一频程的中心频率,该值为:
f中
f上 f下
目前通用的十个倍频程的中心频率为31.5、63、125、250、500、1000、 2000、4000、8000、16000Hz。
倍频程频率范围 倍频程中心频率 1/3倍频程中心频率
45~90
90~180 180~355 355~710 710~1400 1400~2800 2800~5600
63
125 250 500 1000 2000 4000
50(45~56)
100(90~110) 200(180~225) 400(355~450) 800(710~900)
最下面是闻阀限等响线;最上面是痛阀限等响线。
响度级LN是一个相对量,响度N(单位为sone(宋))是绝对值。
lg N 0.0301 LN 1.204
上式表示响度级每增加10phon,则响度增加一倍。
lg N ' 0.0301 (LN 10) 1.204 (0.0301 LN 1.204) 0.301 lg N lg 2 lg 2N
电机噪声
空气动 力噪声
噪声通过 空气传播
产生 产生
气体压力周 期性波动
(一)电磁振动和噪声
电磁噪声来源于电磁振动,电磁振动则由电机气隙磁场作用于电机 铁心产生的电磁力(称激振力)所激发,对永磁电机而言,电机气 隙磁场又决定于绕组磁势、永磁体磁势和气隙磁导。 由永磁电机气隙磁密波的作用,在铁心齿上产生的磁力有径向和切 向两个分量。径向分量使铁心产生的振动变形是电磁噪音的主要来 源;切向分量是与电磁转矩相对应的作用力矩,它使铁心齿根部弯 曲而产生局部振动变形,这是电磁噪音的一个次要来源。 因此分析永磁电机的电磁振动和噪声,主要是分析气隙的径向电磁 力波和定子的径向固有振动特性。
对于中小电机(中心高225mm及以下且长度不超过1m),将其视为点 声源,采用半球法配置,一般在1m范围内配置半球面。然后用声压级 计测出各点的A计权声压级,再按下式求出电机噪声的A计声功率级: