松下伺服MSD操作说明
松下伺服几个参数需要熟悉并掌握设置方法

松下伺服几个参数需要熟悉并掌握设置方法
松下伺服参数共有200多个,但一般的控制场合只需要掌握少数几个即可。
伺服系统有位置控制、速度控制、转矩控制以及三者的组合等多种控制模式,但大多数场合都是将伺服系统用于精密定位,其次是转矩控制,速度控制则
多使用变频器,因为变频器性能已经足够满足要求了,而价格比伺服低。
本
项目即是用于定位控制。
松下伺服用于定位控制,下面几个参数需要熟悉并掌握设置方法:
Pr0.00:伺服旋转方向切换。
常常有这样的情形,伺服驱动需要调换旋转
方向,只需要将Pr0.00中的值由”1”改为“0”,或由“0”改为“1”(出厂值是“1”)。
Pr0.01:伺服控制模式的设置。
位置控制是缺省模式(Pr0.01=0),其他模
式设置可参考如下:
Pr0.07:伺服控制脉冲输入方式。
PLC发送高速脉冲给伺服驱动器,有几
种方式,可以是正转一路脉冲,反转一路脉冲;也可以是只用一路脉冲,而
增加一个方向控制信号(高低电平即可),当然也可以是90°相位差的2相脉。
松下伺服参数导入
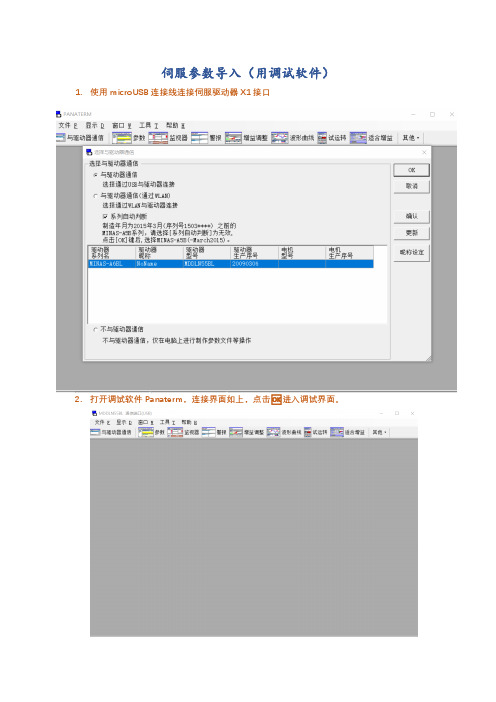
伺服参数导入(用调试软件)1.使用microUSB连接线连接伺服驱动器X1接口
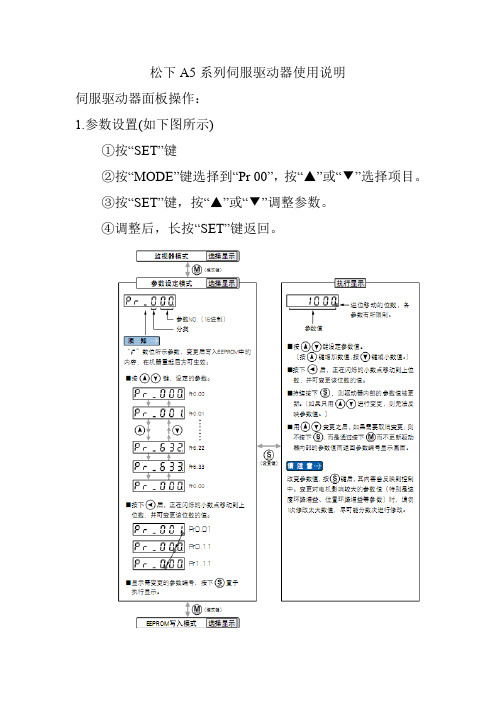
2.打开调试软件Panaterm,连接界面如上,点击 进入调试界面。
3.点击调试界面上方菜单栏——参数,进入参数设置界面。
选择从伺服器读取或者从文件读取(导入参数时),确认选择
4.参数界面
界面左侧列表为参数类别,右侧为详细参数列表
保存参数步骤:
1.打开参数界面,选择从驱动器读取,点击保存
2.写入(可不写)描述,点击OK确认
3.给文件命名,选择保存位置。
导入参数步骤:
1.连接驱动后,点击参数,选择从文件读取
2.选择文件路径,勾选全显示,选取所需导入参数文件,点击OK
3.打开文件后,点击传送,确认,传送完成后点击EEP,确认写入,写入完成后驱动器断电重启后生效。
松下伺服放大器的使用
松下A5系列伺服驱动器使用说明
伺服驱动器面板操作:
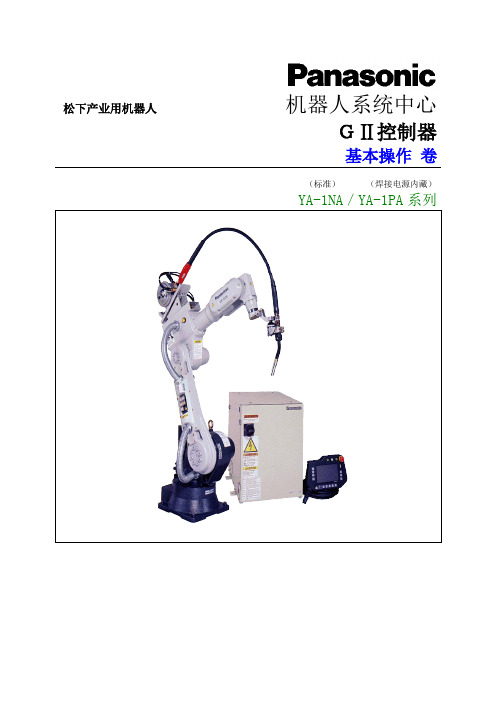
1.参数设置(如下图所示)
①按“SET”键
②按“MODE”键选择到“Pr 00”,按“▲”或“▼”选择项目。
③按“SET”键,按“▲”或“▼”调整参数。
④调整后,长按“SET”键返回。
2.参数保存,数据设好,按“SET”确认。
①按“MODE”键选择到“EE-SET”后
②按“SET”键确认,出现“EEP-”,
③按“▲”键3S后,出现“Finsh”/“reset”然后重新上电既保存。
(如图所示)
3.绝对编码器清零。
(如图所示)。
4、参数初始化(恢复出厂)
按下“MODE”键,再按“▲”或“▼”选择功能项目。
选择好功能后,按“SET”键开始执行该功能。
然后按下“▼”键持续3S。
依次出现“start”→“finish”表示执行完成。
5、报警解除操作。
(如图所示)
当出现报警且故障解除后,可通过以下操作解除报警。
附:详细内容请参照“松下伺服A5系列.pdf”。
Pr005=0 指令脉冲输入方式选择pr007=1 pr008=350(马达转一圈需要的脉冲数0)
Dp_spd电机转速。
松下机器人操作手册
R-Shift Key L-Shift Key 3Point Deadman Switch (Deadman Switch) +key(Plus key) -key(Minus key)
P2
安全开关
示意图
2.如何正确使用示教器 (将示教器电缆缠绕在胳膊上,使示教器拿的平稳、安全)
设定
控制器
・在设定窗口 |
输入用户ID
「robot」(英文小写字母)
(允许使用浏览功能)
・在设定窗口 |
输入登录密
码「0000」(数字)。
◎标准设定 (系统管理员级)
用户ID
robot
用户登录密码
0000
当输入错误需要修正时,可以使用BS清除+
・B2以后的版本 【允许使用自动登录功能】 设定 → 管理工具 → 用户管理→
1)打开 MORE 菜单
※1
2)选择 扩张设定
※5
a.焊接区间转换
b.示教中使用焊丝接触监测功能
c.使用转换缓冲器
d.程序测试功能
e.跟踪设定
取消
※5
扩张设定
P12
④文件(程序)的检查・修正操作
A.当前示教程序的跟踪修正
※1
1.选择机器人运动OFF ※1
功能键
ON(灯亮)
OFF(灯灭)
2.移动指针到[程序窗口]的指定行程序上 ※2
①
①②两种操作均可
②
+
持续按下
+ +
前进键
※6向后跟踪
①
+
未到达示教点 到达示教点
持续按下
・向前跟踪到1以外的其它示教点
松下伺服调试说明
Panasonic松下数字交流伺服 安装调试说明书 (2003.11版本) 目 录 1. 松下连接示意图 2. 通电前的检查 3. 通电时的检查 4. 松下伺服驱动器的参数设定 5. 松下伺服驱动器的参数和性能优化调整 1. 松下连接示意图 重要提示: 由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。
否则,会损坏编码器。
(此种 情况,不在松下的保修范围!) 2. 通电前的检查 1) 确认松下伺服驱动器和电机插头的连接,相序是否正确: A.中惯量电机,不带刹车制动器的连接: 伺服驱动器 电机插头 U A V B W C 接地 D 注: 电机相序错误,通电时会发生电机抖动现象。
B.中惯量电机MDMA 0.75KW-2.5KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U F V I W B 接地 D 刹车电源 G 刹车电源 H C. 中惯量电机MDMA 3KW-5KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U D V E W F 接地 G 刹车电源 A 刹车电源 B 2)确认松下伺服驱动器CN SIG和松下伺服电机编码器联接正确, 接插件螺丝拧紧。
3)确认松下伺服驱动器CN I/F和数控系统的插头联接正确, 接插件螺丝拧紧。
3.通电时的检查 1) 确认三相主电路输入电压在200V-220V范围内。
建议用户选用380V/200V的三相伺服变压器。
2)确认单相辅助电路输入电压在200V-220V范围内。
4.松下伺服驱动器的参数设定 1)松下伺服驱动器修改参数的操作方法 A. 接通驱动器电源; B. 按操作面板上的“SET”键; C. 按住“MODE”键,选择参数页面 PR _ 00 ; D. 用上○∧,下○∨按钮,选择你需要修改参数的参数号码 PR _ 42 (例修改42号参数); E. 按“SET”键,显示原来的参数值 00; F. 用左○<,上○∧,下○∨按钮,改变参数值; G. 修改完毕, 按“SET”键确定。
松下伺服A面板操作完整版

松下伺服A面板操作HEN system office room [HEN 16H-HENS2AHENS8Q8-HENH1688]按4次上键显示(反馈脉冲 按5次上键显示(指令脉冲 按13次上键显示dl5. oL 按9次下键显示d27・Pn (PNA5面板操作需要设定的参数二、监视器的观测1、驱动器上电后按一次设置键S 进入(电机转速),按3次上键显示(转矩指 令),再按一次设置键S 进入监控值状态;2、 驱动器上电后按一次设置键S 进入(电机转速), 总和),再按一次设置键S 进入监控值状态;3、 驱动器上电后按一次设置键S 进入(电机转速), 总和),再按一次设置键S 进入监控值状态;4、 驱动器上电后按一次设置键S 进入(电机转速), (过载率),再按一次设置键S 进入监控值状态;5、 驱动器上电后按一次设置键S 进入(电机转速),间电压),再按一次设置键S 进入监控值状态; 三、参数的修改1、驱动器上电后按一次设置键S 进入;2、 按一次模式键M 进入参数设定模式,通过上、下、左键选择所要修改的参数, 按设置键S 进入该参数的设定值;3、 把对应参数的设定值修改后,再按住设置键S 约2秒后,界面自动返回到对应 的参数设定模式PAr. ***;四、EEPROM写入模式1、在返回到对应的参数设定模式PAr. ***后,再按一次模式键M进入参数EEPROM 写入模式EE_SEt;2、按一次设置键S进入EEP -模式;3、再按住向上键约5秒后,显示EEP—-逐渐增加直到显示rESEt或Finish为止, 设置参数写入完毕。
五、JOG试运行方法1、驱动器上电后按一次设置键s进入;2、按3次模式键M进入辅助模式AF_ACL,按4次向上键直到出现AF_JOG:3、按一次设置键S进入JOG -模式;再按住向上键约5秒后,显示JOG-—逐渐增加直到显示rEAdy为止;4、再按住向左键约5秒后,右边的小数点逐渐向左边移动,直到显示SrV_on为止;5、此时按住上、下键即可进行电机正反转。
MSD系列伺服驱动器说明书

2、设备损坏的警告 警告 请勿将动力电直接接到驱动器 U、V、W 的输出端,这样会对驱动器造成损坏。 伺服电机与伺服驱动器之间须直连,请勿在驱动器U、V、W的输出端连接容 性元件,如噪声抑制滤波器、脉冲干扰限制器等,这样会使驱动器无法正常 工作。 请按要求将驱动器输入端接入符合标准的电源。 通电前请验证电缆连接的正确性和可靠性。 请按要求选购并使用电机,否则可能会造成驱动器和电机的损坏。
-2-
交流伺服驱动器
伺服电机的额定转矩要高于有效的连续负载转矩。 负载惯量与伺服电机惯量之比应小于推荐值。 3、火灾的警告 警告 驱动器不能安装在可燃物体的表面,并远离易燃物品。否则易引起火灾。 请勿在潮湿、腐蚀性气体、可燃性气体的环境中使用。否则易引起火灾。 当驱动器工作时如出现异常情况,请立刻切断电源进行检修工作。驱动器长 时间超负荷工作,可能引起损坏及火灾。
-1-
交流伺服驱动器
安全注意事项
在产品存放、安装、配线、运行、检查或维修前,用户必需熟悉并遵守以下 重要事项,以确保安全地使用本产品。 1、触电伤害的警告
警告 当驱动器电源接通时,请勿打开机器外壳,以免触电。 当外壳打开时,请勿给驱动器加电,以免碰到外露的高压电部分而触电。 当驱动器进行维护时,切断电源后,请等候不少于 5 分钟,并用电压表检测 高压电容两端,确认已降至安全电压后,才可以进行操作。 请将驱动器可靠安装后,再进行通电。 伺服驱动器和伺服电机必须可靠接地。 手潮湿时请勿接触驱动器,以免触电。 错误的电压或电源极性可能会引起爆炸或操作事故。 确保电线绝缘,避免挤压电线,以免电击。
交流伺服驱动器
序
首先非常感谢您购买 首先非常感谢您购买公司的交流伺服驱动器产品。 ● 本手册记载了使用本产品需要注意的重要事项。 ● 本使用手册提供给使用者选型、安装、参数设置、现场调试及故障诊断的相 关注意事项及指导。 ● 请在使用之前务必阅读「安全注意事项」 。 ● 为正确使用本系列伺服驱动器,请事先认真阅读本手册,并请妥善保存以备 后用。设备配套客户,请将此手册随设备发给最终用户。
松下伺服电机的使用

松下伺服电机使用简例一、基本接线主电源输入采用~220V,从L1、L3接入(实际使用应参照操作手册);控制电源输入r、t也可直接接~220V;电机接线见操作手册第22、23页,编码器接线见操作手册第24~26页,切勿接错。
二、试机步骤1.JOG试机功能仅按基本接线就可试机;在数码显示为初始状态‘r 0’下,按‘SET’键,然后连续按‘MODE’键直至数码显示为‘AF-AcL’,然后按上、下键至‘AF-JoG’;按‘SET’键,显示‘JoG -’:按住‘^’键直至显示‘rEAdy’;按住‘<’键直至显示‘SrV-on’;按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57设定。
按‘SET’键结束。
2.内部速度控制方式COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-;参数No.53、No.05设置为1:(注此类参数修改后应写入EEPROM,并重新上电)调节参数No.53,即可使电机转动。
参数值即为转速,正值反时针旋转,负值顺时针旋转。
3.位置控制方式COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-;PLUS1(3脚)、SIGN1(5脚)接脉冲源的电源正极(+5V);PLUS2(4脚)接脉冲信号,SIGN(6脚)接方向信号;参数No.02设置为0,No42设置为3,No43设置为1;PLUS(4脚)送入脉冲信号,即可使电机转动;改变SIGN2即可改变电机转向。
另外,调整参数No.46、No.4B,可改变电机每转所需的脉冲数(即电子齿轮)。
常见问题解决方法:1.松下数字式交流伺服系统MHMA 2KW,试机时一上电,电机就振动并有很大的噪声,然后驱动器出现16号报警,该怎么解决?这种现象一般是由于驱动器的增益设置过高,产生了自激震荡。
请调整参数No.10、No.11、No.12,适当降低系统增益。
松下伺服驱动器说明书

PanasonicMinas A4系列AC伺服驱动器说明书Minas A4系列驱动器技术资料选编i目录1.规格型号说明 1 1-1.伺服驱动器型号说明 1 1-2.驱动器与电机的组合 2 1-3.驱动器与电机的尺寸 3 1-4.技术规格 52.外形与接插件9 2-1.接插件外形与清单9 2-2.电源插头X1、X2和编码器插头X611 2-3.控制信号接口X512 2-3-1.位置控制模式控制信号接线图12 2-3-2.速度控制模式控制信号接线图13 2-3-3.控制信号接线详解143.接线图26 3-1.电缆规格与最大长度26 3-2.I/O控制信号插头,编码器插头和外部反馈装置插头26 3-3.接线指示26 3-3-1.连接到电源接线端子的电缆26 3-3-2.连接到控制信号接口X529 3-3-3.连接到编码器信号接口X6344.参数36 4-1.参数概略36 4-2.参数详解39 4-3.电子齿轮功能565.时序图57 6.保护功能60 7.操作说明658.增益调整72 8-1.调整方法与框图72 8-2.实时自动增益调整73 8-3.常规自动增益调整76 8-4.适配增益调整78 8-5.自动调整功能的禁止80 8-6.增益自动设置功能81 8-6.手动调整增益829.控制框图93-cawin—abridged—jul04-Minas A4系列驱动器技术资料选编-1 -1.型号规格说明1-1.伺服驱动器型号说明1-1-1.预期使用期限在如下运行条件下,伺服驱动器预期可以使用28,000小时。
输入电源单相100VAC,50/60Hz;三相200VAC,50/60Hz环境温度 55℃输出转矩按额定转矩输出运行条件电机转速按额定转速输出伺服驱动器的可用期限与其运行工况密切相关。
1-1-2.驱动器型号说明Minas A4系列驱动器技术资料选编 -2 -1-2.驱动器与电机的组合伺服驱动器适配电机 型号 类型输入电源 型号 电压额定功率额定转速编码器规格 MSMD5AZP1*5线制,2500p/r MADDT1105 A 型 单相100V MSMD5AZS1*50W7线制,17位 MSMD011P1*5线制,2500p/r MADDT1107A 型单相100VMSMD011S1*100V100W 7线制,17位 MSMD5AZP1*5线制,2500p/r MSMD5AZS1*50W 7线制,17位 MSMD012P1*5线制,2500p/r MADDT1205A 型单相200VMSMD012S1*100W7线制,17位 MSMD022P1*5线制,2500p/r MSMD022S1*200W3000rpm7线制,17位MAMA012P1*5线制,2500p/rMADDT1207A 型单相200VMAMA012S1*200V100W 5000rpm7线制,17位 MSMD021P1*5线制,2500p/r MBDDT2110B 型单相100VMSMD021S1*100V 200W7线制,17位 MSMD042P1*5线制,2500p/r MSMD042S1*400W3000rpm7线制,17位MAMA022P1*5线制,2500p/rMBDDT2210B 型单相200VMAMA022S1*200V 200W 5000rpm7线制,17位 MSMD041P1*5线制,2500p/r MCDDT3120C 型单相100VMSMD041S1*100V 400W7线制,17位 MSMD082P1*5线制,2500p/r MSMD082S1*750W3000rpm7线制,17位MAMD042P1*5线制,2500p/rMCDDT3520C 型单相/三相 200VMAMD042S1*200V 400W 5000rpm7线制,17位Minas A4系列驱动器技术资料选编-3 -1-3.驱动器与电机的安装尺寸1-3-1.驱动器的安装尺寸A型驱动器B型驱动器Minas A4系列驱动器技术资料选编-4 -C型驱动器1-3-2.电机的安装尺寸请参考电机样本,此从略。
PANASONIC 数字交流伺服 调试说明书

指令脉 冲输入 42 方式选
择 指令脉 4A 冲分倍 频倍率 48 第 一 指
令脉冲
分倍频
分子
1
0 需计算 (数值范围: 1~10000)
可以设定从控制器送给驱动器的指令脉冲的类 型。
根据不同螺距的丝杆与带轮比计算确定,计算 方法如下:
参数 48 号
10000
———— = —————————————
(2) 以上步骤完成后驱动器根据机床的实际情况自动的设置完 驱动器的各增益数值。此时需把 Pr21 号参数实时自动增益 功能设为无效,设为 0。同时把 Pr31 号参数第一控制切换模 式设为 7,(在位置指令有变化时,即选择第二增益)。设定完成后 保存到 EEPROM 中。
(3)如果 Pr22 号刚性参数设不上去,首先考虑机械上有无安
伺服驱动器
3U 2V 1W 接地
电机插头
A B C D
注: 电机相序错误,通电时会发生电机抖动现象。
3
松下 A4 数字交流伺服调试说明书
B.中惯量电机 MDMA 0.75KW-2.5KW,带刹车制动器电机的连接:
伺服驱动器
U V W 接地
刹车电源 刹车电源
电机插头
F I B D G H
C. 中惯量电机 MDMA 3KW-5KW,带刹车制动器电机的连接:
松下 A4 数字交流伺服调试说明书 宁波凯恩帝数控技术公司 NINGBO KND CNC TECHNIQUE Co. Ltd.
Panasonic
松下A4数字交流伺服 安装调试说明书
(2005.11版本)
宁波凯恩帝数控技术公司
1
松下 A4 数字交流伺服调试说明书
目录
1. 松下 A4 连接示意图 2. 通电前的检查 3. 通电时的检查 4. 松下 A4 伺服驱动器的参数设定
松下伺服调试说明

Panasonic松下数字交流伺服 安装调试说明书 (2003.11版本) 目 录 1. 松下连接示意图 2. 通电前的检查 3. 通电时的检查 4. 松下伺服驱动器的参数设定 5. 松下伺服驱动器的参数和性能优化调整 1. 松下连接示意图 重要提示: 由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。
否则,会损坏编码器。
(此种 情况,不在松下的保修范围!) 2. 通电前的检查 1) 确认松下伺服驱动器和电机插头的连接,相序是否正确: A.中惯量电机,不带刹车制动器的连接: 伺服驱动器 电机插头 U A V B W C 接地 D 注: 电机相序错误,通电时会发生电机抖动现象。
B.中惯量电机MDMA 0.75KW-2.5KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U F V I W B 接地 D 刹车电源 G 刹车电源 H C. 中惯量电机MDMA 3KW-5KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U D V E W F 接地 G 刹车电源 A 刹车电源 B 2)确认松下伺服驱动器CN SIG和松下伺服电机编码器联接正确, 接插件螺丝拧紧。
3)确认松下伺服驱动器CN I/F和数控系统的插头联接正确, 接插件螺丝拧紧。
3.通电时的检查 1) 确认三相主电路输入电压在200V-220V范围内。
建议用户选用380V/200V的三相伺服变压器。
2)确认单相辅助电路输入电压在200V-220V范围内。
4.松下伺服驱动器的参数设定 1)松下伺服驱动器修改参数的操作方法 A. 接通驱动器电源; B. 按操作面板上的“SET”键; C. 按住“MODE”键,选择参数页面 PR _ 00 ; D. 用上○∧,下○∨按钮,选择你需要修改参数的参数号码 PR _ 42 (例修改42号参数); E. 按“SET”键,显示原来的参数值 00; F. 用左○<,上○∧,下○∨按钮,改变参数值; G. 修改完毕, 按“SET”键确定。
Panasonic伺服参数设定说明

P a n a s o n i c伺服参数设定说明Prepared on 24 November 2020Panasonic(MINAS A系列)伺服参数设定说明:注意:齿轮比设错,编码器会无回授,同时控制器发遗失位置命令、严重追随误差警报。
使用面板设定参数的方式:1、接通驱动器电源;2、按set键按钮;3、按住MODE键按钮,到显示为:“PA_ 00”;4、按上↑、或下↓键按钮,来选择需要设定的数号,如选择10号参数,显示为:“PA_ 10”;5、按set键按钮,进入对应参数值,显示为:“ 50”;6、用左←键、上↑键、下↓键,来修改设定数值;7、修改完后,按set键按钮,确认退出;当修改完所有要修改的参数后,要执行选择EEPROM模式写入,8、按MODE键按钮,到显示为:“EE_ SET”;9、按set键按钮,到显示为:“EEP -”;10、按住上↑键按钮约(持续3秒钟),显示转换如下:“EEP -”→“EEP - -”→“- - - - - -”→“START” [→“FINISH”[→“Reset”[→“ERROR”“FINISH”与“Reset”写入完成;“ERROR”写入出错,须重新设定参数,后再写入;显示“Reset”需要关电源,重开电源后,设定参数值生效;常规自动增益调节:1、选择常规自动增益调节模式,初始显示“r 0”;2、按SET键按钮一次,按MODE模式键切换,按钮三次,到显示为“At_no1”;3、按上↑、下↓键来选择机器的刚性,刚性越高越好,但前提条件是机台不抖动;4、按SET键按钮,进入监视器 / 执行模式;显示为:“Atu -”;5、在监视器 / 执行模式上运作:按住上↑键按钮约3秒,直到出现显示“start”,电机开始运转,大约15秒内,电机重复5个周期,包括两圈的正转和反转。
“Atu -”→“Atu - -”→“- - - - - -”→“START” [→“FINISH”[→“ERROR”6、把获得的增益值写入到EEPROM。
松下伺服设置
25 光栅尺
分频分母
26
方向转换
27
Z 相断线检测无效
28
过大设置
混合偏差
29
清除设定
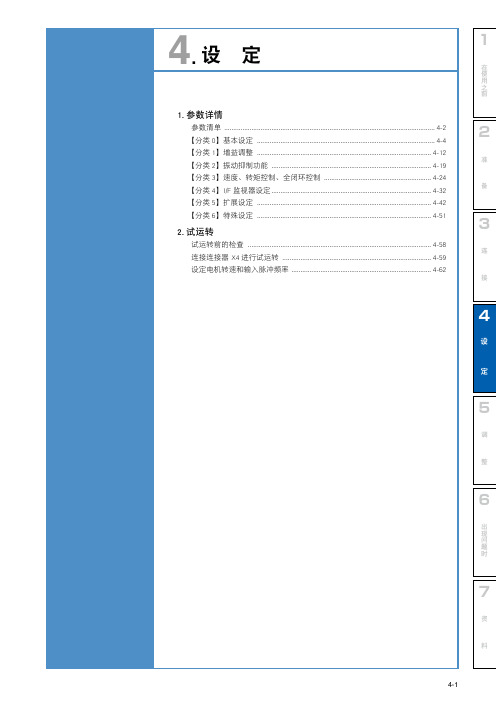
4-2
关联模式 详细 PSTF 页
○○—○ ○○○○ ○○○○ ○ ○ ○ ○ 4-19 ○○○○ ○○○○ ○○○○ ○○○○ ○○○○ ○ ○ ○ ○ 4-20 ○○○○ ○○○○ ○○○○ ○ — — ○ 4-21 ○——○ ○ — — ○ 4-22 ○ — — ○ 4-21 ○ — — ○ 4-22 ○ — — ○ 4-21 ○ — — ○ 4-22 ○ — — ○ 4-21 ○——○ ○ — — ○ 4-22 ○ — — ○ 4-23
● 参数号码如下所示。 Pr0.00
分类号码
参数号码
●“关联模式”的项目表示 P:位置控制、S:速度控制、T:转矩控制、 F:全闭环控制
参数号码 分类 号码
名 称
00 旋转方向设定
01 控制模式设定
02
设定
实时自动调整
03
机器刚性设定
04 惯量比
【 分
05
输入选择
类 06 指令脉冲 旋转方向设定
5】 04 驱动禁止输入设定
扩 05 驱动禁止时时序设定
展 设
06 伺服关闭时时序设定
定 07
时序设定
08 主电源关闭时 LV 触发选择
○——○ ○——○
4-42 ○○○○ ○○○○ ○○○○ ○○○○ ○ ○ ○ ○ 4-43 ○○○○
23 干扰转矩补偿增益
24 干扰观测器滤波器
27 警告闭锁时间选择
—○—— 4-24
—○—— —○○— — ○ — — 4-25 —○—— —○—— —○—— —○—— —○—— — ○ — — 4-26 —○—— —○—— —○—— —○—— —○—— — ○ ○ — 4-27 —○○— ——○— ——○— — — ○ — 4-28 ——○— ——○— — — ○ — 4-29 ———○ ———○ ———○ — — — ○ 4-30 ———○ ———○ — — — ○ 4-31
松下伺服调试说明.

Panasonic松下数字交流伺服安装调试说明书(2003.11版本目录1.松下连接示意图2.通电前的检查3.通电时的检查4.松下伺服驱动器的参数设定5.松下伺服驱动器的参数和性能优化调整1.松下连接示意图重要提示:由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。
否则,会损坏编码器。
(此种情况,不在松下的保修范围!2.通电前的检查1确认松下伺服驱动器和电机插头的连接,相序是否正确:A.中惯量电机,不带刹车制动器的连接:伺服驱动器电机插头U AVBWC接地D注:电机相序错误,通电时会发生电机抖动现象。
B.中惯量电机MDMA0.75KW-2.5KW,带刹车制动器电机的连接:伺服驱动器电机插头U FVIWB接地D刹车电源G刹车电源HC.中惯量电机MDMA3KW-5KW,带刹车制动器电机的连接:伺服驱动器电机插头U DVEWF接地G刹车电源A刹车电源B2确认松下伺服驱动器CN SIG和松下伺服电机编码器联接正确,接插件螺丝拧紧。
3确认松下伺服驱动器CN I/F和数控系统的插头联接正确,接插件螺丝拧紧。
3.通电时的检查1确认三相主电路输入电压在200V-220V范围内。
建议用户选用380V/200V的三相伺服变压器。
2确认单相辅助电路输入电压在200V-220V范围内。
4.松下伺服驱动器的参数设定1松下伺服驱动器修改参数的操作方法A.接通驱动器电源;B.按操作面板上的“SET”键;C.按住“MODE”键,选择参数页面PR_00;D.用上○∧,下○∨按钮,选择你需要修改参数的参数号码PR_42(例修改42号参数;E.按“SET”键,显示原来的参数值00;F.用左○<,上○∧,下○∨按钮,改变参数值;G.修改完毕,按“SET”键确定。
重复以上D~G过程,修改其它参数。
修改参数操作完毕,切记选择驱动器EEPROM写入模式,保存参数。
H.按住“MODE”键,选择EEPROM写入模式页面EE_SEt;I.按“SET”键,显示EEP-;J.按住上“○∧”按钮(约3秒钟。
松下伺服 JOG 试运行操作
松下伺服JOG 试运行操作: 一、按一次S,三次M,四次向上键,一次S,长按向上键5秒,再长按向左键5秒,进入JOG,这时按上、下键电机即可正、反转。
这就是JOG试运行; RF-JOG 按下S 移动到JOG - 持续按▲键直至显示为READY画面。
持续按向左的方向键直至显示5 U_ ON. 二、试机步骤 1.JOG试机功能仅按基本接线就可试机; 在数码显示为初始状态‘r 0’下,按‘SET’键,然后连续按‘MODE’键直至数码显示为‘AF-AcL’,然后按上、下键至‘AF-JoG’; 按‘SET’键,显示‘JoG -’:按住‘^’键直至显示‘rEAdy’; 按住‘<’键直至显示‘SrV-on’; 按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57设定。
按‘SET’键结束。
器的面板上就可以实现JOG 试运行,具体可看说明书中的JOG 试运行操作。
松下伺服驱动器软件使用手册PANATERMver.6.0使用说明书.pdf
松下伺服驱动器软件使用手册PANATERMver.6.0使用说明书.pdf操作手册AC伺服驱动器MINAS 系列用安装支援软件PANATERM Ver. 6.0 (Windows Vista®/Windows® 7/Windows® 8 用)λ非常感谢本次要求松下电器 AC 伺服驱动器 MINAS 系列用安装支援软件PANATERM Ver.6.0。
λ请阅读此操作手册,正确使用。
特别是「安全注意事项」(3~4 页) 请在使用前务必阅读,确保安全使用。
电池刷新画面172 目录Block motion 编辑器画面 175 Block motion 监视器画面 183 7.问题対策 186目录2 不能安装 186安全注意事项 3 不能通信 186使用注意事项 5 不能打印 1871.前言 6 无法卸载 187 PANATERM 的概要6 不能轴设定 1872.系统构成7 PANATERM 动作不正常188 适用驱动器的确认7 参数画面动作不正常 189 必要的系统构成9 监视器画面的动作不正常1903.安装 11 警报画面的动作不正常 191 安装程序的构成11 增益调整画面的动作不正常 191 安装方法11 波形曲线画面动作不正常 1934.基本操作 14 试运转画面的动作不正常 194 键的标记方法14 频率特性画面的动作不正常195 菜单的选择操作方法14 引脚定义设定画面的动作不正常... 196 数値的输入14 问题解答画面的动作不正常196 文件操作15 模拟输入调整画面的动作不正常 ... 197 各画面的结束方法17 原点搜索画面的动作不正常 197 工具提示文本17 安装向导动作不正常 1985.起动及结束 18 适合增益画面(标准)的动作不正常. 199 连接方法18 适合增益画面(2 自由度控制对应)的动 PANATERM 的起动20 作不正常 200 PANATERM 的结束20。
松下伺服A面板操作
松下伺服A面板操作文档编制序号:[KK8UY-LL9IO69-TTO6M3-MTOL89-FTT688]A5面板操作一、需要设定的参数二、监视器的观测1、驱动器上电后按一次设置键S进入d01.SPd(电机转速),按3次上键显示d04.trq(转矩指令),再按一次设置键S进入监控值状态;2、驱动器上电后按一次设置键S进入d01.SPd(电机转速),按4次上键显示d05.nPS(反馈脉冲总和),再按一次设置键S进入监控值状态;3、驱动器上电后按一次设置键S进入d01.SPd(电机转速),按5次上键显示d06.cPS(指令脉冲总和),再按一次设置键S进入监控值状态;4、驱动器上电后按一次设置键S进入d01.SPd(电机转速),按13次上键显示d15. oL(过载率),再按一次设置键S进入监控值状态;5、驱动器上电后按一次设置键S进入d01.SPd(电机转速),按9次下键显示d27. Pn(PN间电压),再按一次设置键S进入监控值状态;三、参数的修改?1、驱动器上电后按一次设置键S进入d01.SPd;2、按一次模式键M进入参数设定模式PAr.000,通过上、下、左键选择所要修改的参数,按设置键S进入该参数的设定值;3、把对应参数的设定值修改后,再按住设置键S约2秒后,界面自动返回到对应的参数设定模式PAr.***;四、EEPROM写入模式?1、在返回到对应的参数设定模式PAr.***后,再按一次模式键M进入参数EEPROM写入模式EE_SEt;2、按一次设置键S进入EEP - 模式;3、再按住向上键约5秒后,显示EEP---逐渐增加直到显示rESEt或FiniSh为止,设置参数写入完毕。
五、JOG试运行方法1、驱动器上电后按一次设置键S进入d01.SPd;2、按3次模式键M进入辅助模式AF_ACL,按4次向上键直到出现AF_JOG;3、按一次设置键S进入JOG - 模式;再按住向上键约5秒后,显示JOG---逐渐增加直到显示rEAdy为止;4、再按住向左键约5秒后,右边的小数点逐渐向左边移动,直到显示SrV_on为止;5、此时按住上、下键即可进行电机正反转。
新手教程松下伺服快速入门

新手教程松下伺服快速入门伺服控制系统在各个行业应用越来越广泛,除了在工业机器人、机械加工、医疗机械、半导体等标准设备上大量使用外,在一些非标设备制造如食品加工、包装机械、印刷、挤压成型、搬运机械手等也有着越来越多的应用。
一、什么是伺服系统伺服系统也称为“随动系统”或“自动跟踪系统”,它是以机械量如位置、速度、力矩等作为被控量的一种自动控制系统。
伺服系统由专用的伺服驱动器和伺服电机构成雷达是典型的随动伺服系统伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把从上位机接收到的电信号转换成电动机轴上的角位移、角速度或转矩输出。
伺服电机分为交流伺服电机和直流伺服电机。
现在除了特殊用途,直流伺服基本上已经被性价比极高的交流伺服所取代。
伺服控制系统有三种主要的控制方式:位置控制、速度控制和转矩控制。
也可以两两结合控制(而步进控制系统通常只能用于位置控制、变频控制系统一般只能用于速度控制、力矩机控制系统只用于转矩控制)。
伺服系统因为集成了编码器,而且编码器的分辨率已经达到了2^23=8388608(以松下A6系列为例),理论上伺服电机旋转一圈可以通过8388608个脉冲来控制,因此控制精度达到了极高的程度。
数年前或者更早的时期伺服应用还不是特别广,是因为伺服系统的价格昂贵,10KW都需要近十万,而现在价格约为原来的十分之一,而性能又大大提高,所以才有广泛而快速的应用。
松下A6系列二、松下伺服驱动器的面板操作伺服系统让大家感到“高端”不好入门,就是它不像一般的控制器,浏览一下简易说明书就能操作。
伺服系统有着强大的功能的同时,却是相对复杂的操作。
初学者刚买回来的伺服系统即使主回路接线都正常完成,想试着让电机转起来还不是那么简单,必须要通过驱动器操作面板进行试运行(JOG)才可以。
伺服系统性能强大,比如发生了故障,驱动器中保存了发生故障的时间、代码,手册上即可根据代码查询故障解决方法;电机不转也类似,可查询到不转原因。
松下A系列伺服位置控制使用方法

松下A系列伺服位置控制使用方法Document number【SA80SAB-SAA9SYT-SAATC-SA6UT-SA18】松下A5系列伺服位置控制使用方法置模式(Pr r 000)-----按上下键或<键(可移动小数点)到要设定的参数——按S键进入、修改(按上升键或下降键)——按S键保持3秒——按一下M键>写入模式(EE_SEb)>再按”S”键>执行显示(EEP -)按上升键保持5秒----EEP --、EEP ---、EEP ----、--------SbRrb---Finish,结束。
三、辅助功能模式(AF_RcL):按上升或者下降键选择项目1、自动补偿调整(AF_oF1、oF2、oF3)AF_RcL>下降键>AF_oF1>S键>oF1 --持续按上升键执行。
2、试运行(JOG)持续按上升键(CW)--rERdy------<键---SrU_on---持续上升键(CCW)3、参数初始化(AF_ini)---按“S”键----ini----持续按上升键5秒 -------Finish----------结束4、前面板锁定解除(AF_unL)---按“S”键---unL--持续按上升键5秒----SbRrb----unL------、------------Finish 结束。
以上字母只是近似面板上显示的简码。
四、常见报警及其原因1、“11”---控制电源电压不足电源电压低或者驱动器故障2、“16”过载负载过重或电机电源线相序错误3、“21”编码器通讯异常编码器断线或者虚焊、漏焊、脱焊4、“24”位置偏差过大电机未按指令动作加大的值或者设为0五、接线1、主电源及编码器接线:2、大功率伺服编码器接线:3、控制端子接线:。