中国科学院大学毕业论文模板
最新精美中国科学院大学毕业论文毕业设计答辩动态ppt模板

点击添加文字说明
论文描述科研成果的文章,简称之为论 文。它既是探讨问题进行科学研究的一 种手段,
点击添加文字说明
论文描述科研成果的文章,简称之为论
目 录
1 2 3 4 5
Contents
研究/选题背景 研究方法与思路
关键技术与实践难点 研究成果与应用 论文总结
研究/选题背景
Research Background
Research Background
研究/选题背景
2
4
1 点击添加照片文字性说明 Add your text here please
论文描述科研成果的文章, 简称之为论文。它既是探 讨问题进行科学研究的一 种手段,精
Working Solutions
解决方案
点击添加文字说明
论文描述科研成果的文章,简称之为论 文。它既是探讨问题进行科学研究的一 种手段,
点击添加文字说明
论文描述科研成果的文章,简称之为论 文。它既是探讨问题进行科学研究的一 种手段,
论文描述科研成果的文章,简称之为论文。它既是 探讨问题进行科学研究的一种手段,又是描述科研 成果进行学术交流的一种工具。如学年论文、毕业 论文、学位论文、科技论文、成果论文等,总称为 论文。为了探讨和掌握论文的写作规律和特点,需 要对论文进行分类。由于论文本身的内容和性质不 同,研究领域、对象、方法、表现方式不同,因此, 论文就有不同的分类方法。
实践难点
点击添加标题
论文描述科研成果的文章, 简称之为论文。它既是探 讨问题进行科学研究的一 种手段,
点击添加标题
论文描述科研成果的文章, 简称之为论文。它既是探 讨问题进行科学研究的一 种手段,
点击添加标题
中国科学院研究生院博士学位论文模板

发表文章目录 · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 19
简历 · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 21
in Operations Research
摘要
本 文 是 中 国 科 学 院 学 位 论 文 的 LATEX 模 板。 除 了 介 绍 LATEX 文 档 类 CASthesis 的用法外,本文还是一个简要的学位论文写作指南。
关键词: 中科院,学位论文,LATEX 模板
Abstract
This paper is a thesis template of Chinese Academy of Sciences. Besides that the usage of the LATEX document class CASthesis, a brief guideline for writing the thesis is also included.
附录 A 中国科学院研究生院学位论文撰写要求 · · · · · · · · · · · · · · · · · · · · · · · · · 11 A.1 基本要求 · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 11 A.1.1 硕士学位论文· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 11 A.1.2 博士学位论文· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 11
中国科学技术大学本科毕业论文
目录第一章绪论 (5)1.1 GPS全球定位系统在各个方面的应用 (5)1.2国外GPS车控系统发展概述 (5)1.3 国内GPS 车控系统的发展情况 (5)1.4 基于GPS技术的车辆监控系统概述及其发展趋势 (6)1.5 小结 (9)第二章现有的GPS智能车辆监控示范系统 (10)2.1中心站部分 (11)2.1.1监控中心的物理构成 (11)2.1.2监控中心的软件构成 (12)2.2 现有监控系统存在的问题 (12)2.3 小结 (12)第三章监控中心的Intranet方案 (13)3.1 Intranet简介 (13)3.2 监控系统的结构分析 (14)3.2.1 Client/Server结构 (14)3.2.2 Browser/Server结构 (15)3.2.3 Client/Server结构的优点 (16)3.2.4 Browser/Server结构的优点 (16)3.2.5 B/S与C/S相结合的体系结构 (17)3.3 小结 (18)第四章 B/S结构进行实时监控的可行性分析 (19)4.1 Internet技术 (19)4.2 Web技术 (19)4.3 ASP技术 (20)4.4 ActiveX技术介绍 (22)4.4.1 ActiveX简介 (22)4.4.2 ActiveX技术基本原理 (23)4.4.3. ActiveX技术解决方案的特点和优势 (24)4.5 小结 (27)第五章 Web数据库及其访问技术 (28)5.1通用网关接口CGI的体系结构 (28)5.2 Web服务器专用API结构 (30)5.3基于JDBC的Web服务器 (32)5.4 ODBC技术 (34)5.5 Object Web动态网页技术 (36)5.6通用的Web数据库系统体系结构 (37)5.6.1定义 (38)5.6.2通用Web数据系统体系结构 (39)5.7 小结 (41)第六章动态Web页面 (42)6.1.动态HTML与动态Web页面 (42)6.1.1 动态HTML模型 (42)6.1.2 动态风格 (43)6.1.3 动态内容 (43)6.1.4定位于动画 (44)6.1.5数据捆绑 (44)6.1.6本系统中的具体应用 (45)6.2 ASP技术开发动态Web页面 (46)6.2.1 ASP文件和语法 (46)6.2.2 ASP内建对象 (47)6.2.3基于ASP的ActiveX Data Object数据库访问 (47)6.2.4服务器构件 (48)6.2.5利用IIS发布动态信息 (48)6.3 小结 (49)第七章开发工作总结及技术展望 (50)7.1开发工作的总结 (50)中文内容摘要本文主要阐述的是关于一个“GPS智能车辆监控系统Web联网”的研究与开发的内容。
中国科学院研究生学位论文模版

2
1、正文设四级标题,不得超过四级标题。各级标题的设置如下:
章 x 标题:
节 x.x 标题:
节 x.x.x 标题:
节 x.x.x.x 标题:
2、 论文开本:A4 纸,纵向,应用于整篇文档,双面打印装订装订(中英文题名页,
独创性声明和学位论文版权授权使用说明单面打印)。
页面设置:上边距 2.7cm,下边距 2.7cm,内侧距 3cm,外侧距 2.5cm,
1
第一章 [键入第一章标题 ]
在近海水面突然出现大片红色,随着潮流移动,这一现象称之为“赤潮”。它是 由于海水中的浮游植物、原生动物或细菌爆发性增殖或高度聚集而引起水体变色的一 种有害生态现象,严重危害海水养殖和人类生活的突发性自然灾害。
1.1 的 大夫撒旦法 赤潮是在特定的海洋环境条件下,海水中某些浮游植物、原生动物或细菌爆发性
页码位置:页面顶端(页眉),对齐方式:外端。首页显示页码。
5、页眉:页眉奇偶页不同,奇数页:论文章题目(含章号),偶数页:论文题目。
页眉字体 10 号宋体。
6、特别说明,论文中所有英文、数字、单位一律用 Times New Roman。
不用此信息,删除此框。
3
A
B
图 1.1 赤潮异弯藻在光学显微镜下的照片 A、以硝酸盐为氮源时放大 400 倍;B、以铵为氮源时放大 400 倍
WANG Lin-na (Chemical Technology) Directed by Professor LI Jing-hai Abstract
论文摘要应概括地反映出本论文的主要内容,主要说明本论文的 研究目的、内容、方法、成果和结论,要突出论文的创造性成果或新 见解,不要与引言相混淆。做到读者不阅读论文全文,就能获得必要 的信息。
中国科学院大学毕业论文模板
表达式主要指数字表达式,也包括文字表达式。表达式需另行起排,并用阿拉伯数字分章编号。序号加圆括号,右顶格排。例如:第3章第2个表达式
图、表的常见问题
所有图表是否在正文以相应编号提及并适当说明
经常出现孤立的图和表,只有名称,没有容的说明,及其对文章的贡献
一级节标题
1.3 ××××
黑体四号顶左,单倍行距,段前0.5行,段后0.5行,序号与题名间空一个汉字符
二级节标题
1.3.1 ×××
黑体13磅顶左,单倍行距,段前0.5行,段后0.5行,序号与题名间空一个汉字符
三级节标题
1.3.1.1 ×××
黑体小四居左书写,单倍行距,段前0.5行,段后0.5行,序号与题名间空一个汉字符
类别
数据围
数据特性
对应用系统的要求
告警数据
包括FM, PM, CM, SYS等类别的告警
数据实时产生,具有突发特性,要求数据的可靠处理,不能丢告警
能够提供告警的跨平台可靠发送,数据处理要时高效,具有数据缓冲特性
性能数据
包括OMC, BSC, Site, Cell, Carrier等类别的性能指标
数据每小时/半小时采集计算一次,但是数据量很大
图片不清
从别处拷来图片,图和字都不清楚。最好自己重画,否则必须注明出处。
图背景色太深,色彩用得太复杂
尽量不用深色背景和复杂的色彩,保证在笔记本电脑2米 外能看清图和其中的文字
图片太大或太小
图片应以看清容为原则,图形、文字、空白大小比例匀称
图和表无标题、序号
图序、表序采用阿拉伯数字分章编号,第2章第2个图/表的序号为“图/表2-2” ,图、表标题应简明。序号和标题间空1个字距。
中科院学位论文模版
中科院学位论文模板使用说明1.打开模板本模板的操作命令是基于Microsoft Office Word 2003版本。
建议直接在“资源管理器”中双击模板文档,不要在打开Word窗口后,使用“文件/打开”命令打开模板。
2.模板样式样式可使用“格式/样式和格式”调出并选用或修改,其中的标题部分可使用快捷键选用。
正文首行缩进:论文正文部分,宋体小四号标题(快捷键Ctrl-Alt-0)黑体小三号标题1:1(快捷键Ctrl-Alt-1)黑体四号标题2:1.1(快捷键Ctrl-Alt-2)黑体小四号标题3:1.1.1(快捷键Ctrl-Alt-3)黑体小四号标题4:1.1.1.1(快捷键Ctrl-Alt-4)黑体小四号标题5:1. (快捷键Ctrl-Alt-5)黑体小四号标题6:1) (快捷键Ctrl-Alt-6)黑体小四号标题7:(1) (快捷键Ctrl-Alt-7)黑体小四号网格型:用于论文中的“表格”。
(1)编号列表:用于论文正文中需要编号的内容(请注意其与“标题7”在使用上的区别。
)⏹项目符号:用于论文中需要项目符号的内容。
编号和项目符号也可以使用“格式/项目符号和编号”命令,在弹出对话框的“编号”选项卡中设置和选用。
3.图、表、公式文中“图”、“表”请使用“插入题注”,使用“插入/引用/题注”。
引用题注:请使用“插入/引用/交叉引用”命令,编号规则参见“中科院研究生院学位论文撰写要求”。
4.生成目录使用“插入/引用/索引和目录”命令,在对话框的“目录”选项卡中根据自己的需要选用显示N级标题。
模板默认的目录只选用四级标题。
5.参考文献使用endnote软件直接插入,Style是由ISI推出按我国《GB/T7714-2005 文后参考文献著录规则》制作的。
6.友情提示中状态。
◆保持“常用”工具栏的“显示/隐藏编辑标记”按钮的选中状态,以显示全角/半角空格“”/“.”。
◆每完成一章,使用“插入/分隔符/分隔类型/下一页”换页。
中国科学院大学毕业论文答辩汇报PPT模板

主形象贯穿
与主题相匹配的画面和现 场装饰效果,精心打造欢 娱晚宴氛围,使所有员工 感受到企业的关怀和温暖;
01
四个创新点
04
科技严谨
着重体现产品的科技含量, 体现公司的科学严谨的形 象。
研究思路与方法
Part 2
理论基础 研究思路
采用某某方案 可行性说明
2.1 理论框架
10
01
03
05
中国文化概论
请在这里输入段 落文本内容请在 这里输入段落文
本内容
现代管理学
请在这里输入段 落文本内容请在 这里输入段落文
本内容
行政组织理论
请在这里输入段 落文本内容请在 这里输入段落文
本内容
社会学概论
请在这里输入段 落文本内容请在 这里输入段落文
本内容
02
行政法学
请在这里输入段 落文本内容请在 这里输入段落文
本内容
5
王XX:企业文化学教程[M].中国人民大学出版社, 2019.
秦XX:中小企业文化建设的现状及构建方略研究[J].
6
1.5 主要贡献与创新
8
创意领军
立意高远,体现公司的精神风貌, 树立鲜明的品牌形象,赢得内部的 团结力和凝聚力;
02
03
赢在细节
整个流程中用精致的细节提升兴通 监理的形象,激励员工在未来能更 好的与公司携手并进;
设计 报告
制作出设计报告制作出设计报告制作出设计报告制作出设 计报告制作出设计报告制作出设计报告
4.3 应用前景
企业品牌影 响力提升 产品曝光度增加 活动间接收益 活动直接收益
21
通过举办这次活动,使得企业的品牌 形象得到提升,为公司的发展带来巨 大的机遇。
中国科学院大学-PPT模板

01 短标题格式 03 第三章节标题 05 第五章节标题
02 第二章节标题 04 第四章节标题 06 第六章节标题
• 第一章节标题
• 第二章节标题
• 第四章节标题
• 第五章节标题
• 第六章节标题
01 长标题格式目录页 02 与研究内容相结合的标题一般比较长 03 与研究内容相结合的标题都挺长 04 与研究内容相结合的标题可能非常长 05 第五章节标题 06 第六章节标题
37
公式格式展示页
对于同一页面多个格式不统一的公式,可以分别给他们框框装起来,请输入你的相关介绍请输入 你的相关介绍请输入你的相关介绍请输入你的相关介绍 对于同一页面多个格式不统一的公式,可以分别给他们框框装起来,请输入你的相关介绍
请输入你的公式名称请输入你的公式名称:
请输入你的公式名称:
38
名言、理论论著等引用页
学术活动
1.第10届人工智能会议,作《你的报 告题目》的报告 2.第XX届机器视觉会议,作《你的 报告题目你的报告题目》的报告 3.第10届人工智能会议,作《你的报 告题目》的报告 4.第XX届机器视觉会议,作《你的 报告题目你的报告题目》的报告
40
毕业论文系列-参加课题
课题类别
课题名称
省部级项目
28%
类目1 类目2 类目3 类目4
27
1图表展示页
数据分析显示: 若需修改形状使图表富有创意,可插入形状设置好颜色等参数后,选中该形状 Ctrl+C , 再 选 中 需 修 改 的 柱 形 , 首 次 点 击 选 中 该 系 列 , 再 次 点 击 即 选 中 单 个 , Ctrl+V即可改变柱形的形状
小标题
中国科学院博(硕)士学位论文LyX(LaTeX)模板

3.7.1
文
· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 12
3.7.2
· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 15
······································································ 5
3.2.2
······································································ 6
3.2.3
密级: 秘密 # 5 年
博士学位论文
中国科学院博(硕)士学位论文 LYX 模板 ——基于 XeLATEX、LYX 与 JabRef
学位 学科
位
博士 中国科学院
学博士 与 中国科学院
Experimental Study on Magnetic Pulse Compression System —Case studies of elevated soil warming
2.1
与 ································································· 3
2.1.1 Debian
······················································· 3
中国科学院大学-PPT模板word版本

这页可以展示2个对比项
小标题1
• 请输入你的内容请输入 你的内容请输入内容
• 请输入你的内容请输入 你的内容请输入内容
• 请输入你的内容请输入 你的内容请输入内容
• 请输入你的内容请输入 你的内容请输入内容
小标题2
• 请输入你的内容请输入 你的内容请输入内容
• 请输入你的内容请输入 你的内容请输入内容
• 请输入你的内容请输入 你的内容请输入内容
• 请输入你的内容请输入 你的内容请输入内容
14
这页可展示3个并列项
小标题
阐述小标题观点阐述小 标题观点阐述小标题观 点阐述小标题观点阐述 小标题观点阐述你的小 标题观点
15
这页可以展示3个递进/流程项
请输入你的观点请输入你的观点
3
请输入你的观点请输入你的观点
19
这页可以展示5个并列/流程项
请输入提炼观点标题
请在此处输入你的内容(右 侧5个子标题观点为图示化展 示,默认字体20号,请提炼 精简你的内容,文字较多时 文本框会自动缩排,但字体 较小不适宜大屏幕展示)
小标题 你的小标题
小标题 你的小标题
小标题 你的小标题
中心 主题
小标题 你的小标题
小标题 你的小标题
12
这页可以展示2个并列项
这里可以输入一句概括性的话语,这里可以输入一句概括性的话语
1.标题 请在此输入你的内容输入你的内容
2.标题 请在此输入你的内容输入你的内容
3.标题 请在此输入你的内容输入你的内容
1.标题 请在此输入你的内容输入你的内容
2.标题 请在此输入你的内容输入你的内容
3.标题 请在此输入你的内容输入你的内容
与研究内容相结合的标题一般比较长
国家标准毕业论文格式模板范文
加上自己学校的logo ,或者更换整个封面学士学位论文论文排版机器人PaperYes 制作的本校论文模板作者XX 指导教师::(宋体四号加粗 )〔XX、专业技术职务、工作单位〕学位类别 :专业:学院〔系〕:((宋体四号加粗 )宋体四号加粗 )XXX大学 XXX学院20XX年X月XXX大学学位论文原创性声明本人X重声明:所呈交的学位论文是本人在导师的指导下独立进展研究工作所取得的成果。
尽我所知,除文中已经注明引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写过的研究成果。
对论文所涉及的研究工作做出奉献的其他个人和集体,均已在文中以明确方式标明或致谢。
本人完全意识到本声明的法律结果由本人承当。
作者签名:日期:中国科学院大学学位论文授权使用声明本人完全了解并同意遵守 XXX大学有关保存和使用学位论文的规定,即 XXXX 大学有权保存送交学位论文的副本,允许该论文被查阅,可以按照学术研究公开原那么和保护知识产权的原那么公布该论文的全部或局部内容,可以采用影印、缩印或其他复制手段保存、汇编本学位论文。
涉密及延迟公开的学位论文在解密或延迟期后适用本声明。
作者签名:日期:导师签名:日期:摘要摘要本论文主要内容是基于本高校的论文格式要求,利用论文排版机器人PaperYes的人工智能引擎排版出来的论文模板。
各位同学可以通过此模板撰写论文,只需将自己撰写的论文内容填充到相应的标题下面就可以了,帮助同学们解决论文排版的困扰。
如果有的同学不会用此模板编辑论文,可以选择PaperYes论文排版,根据您所在高校的格式要求,自动生成目录和页眉页脚,解决奇偶页难题,智能编排标题、图、表和公式,适配字体字号和段落等,10 秒搞定,平安高效。
关键词:论文排版;机器人; PaperYes;论文模板AbstractThe main content of this paper is based on the requirement of paper format in our university, using the artificial intelligence engine of PaperYes, a paper typesetting robot, to compose the paper template. Students can use this template to write papers, just fill the content of the papers under the corresponding headings, to help students solve the problem of paper typesetting. If some students do not use this template to edit papers, you can choose PaperYes paper typesetting. According to the format requirements of your university, automatically generate directories and headers and footers, solve the odd and even page problems, intelligently arrange titles, graphs, tables and formulas, and adapt font size and paragraph, etc., 10 seconds to complete, safe and efficient.Key words: PaperYes; Layout Technology; AIrtificialIntelligence; Research; Based on;AbstractThe main content of this paper is based on the requirement of paper format in our university, using the artificial intelligence engine of PaperYes, a paper typesetting robot, to compose the paper template. Students can use this template to write papers, just fill the content of the papers under the corresponding headings, to help students solve the problem of paper typesetting. If some students do not use this template to edit papers, you can choose PaperYes paper typesetting. According to the format requirements of your university, automatically generate directories and headers and footers, solve the odd and even page problems, intelligently arrange titles, graphs, tables and formulas, and adapt font size and paragraph, etc., 10 seconds to complete, safe and efficient.Key words: PaperYes; Layout Technology; AIrtificialIntelligence; Research; Based on;AbstractThe main content of this paper is based on the requirement of paper format in our university, using the artificial intelligence engine of PaperYes, a paper typesetting robot, to compose the paper template. Students can use this template to write papers, just fill the content of the papers under the corresponding headings, to help students solve the problem of paper typesetting. If some students do not use this template to edit papers, you can choose PaperYes paper typesetting. According to the format requirements of your university, automatically generate directories and headers and footers, solve the odd and even page problems, intelligently arrange titles, graphs, tables and formulas, and adapt font size and paragraph, etc., 10 seconds to complete, safe and efficient.Key words: PaperYes; Layout Technology; AIrtificialIntelligence; Research; Based on;AbstractThe main content of this paper is based on the requirement of paper format in our university, using the artificial intelligence engine of PaperYes, a paper typesetting robot, to compose the paper template. Students can use this template to write papers, just fill the content of the papers under the corresponding headings, to help students solve the problem of paper typesetting. If some students do not use this template to edit papers, you can choose PaperYes paper typesetting. According to the format requirements of your university, automatically generate directories and headers and footers, solve the odd and even page problems, intelligently arrange titles, graphs, tables and formulas, and adapt font size and paragraph, etc., 10 seconds to complete, safe and efficient.Key words: PaperYes; Layout Technology; AIrtificialIntelligence; Research; Based on;AbstractThe main content of this paper is based on the requirement of paper format in our university, using the artificial intelligence engine of PaperYes, a paper typesetting robot, to compose the paper template. Students can use this template to write papers, just fill the content of the papers under the corresponding headings, to help students solve the problem of paper typesetting. If some students do not use this template to edit papers, you can choose PaperYes paper typesetting. According to the format requirements of your university, automatically generate directories and headers and footers, solve the odd and even page problems, intelligently arrange titles, graphs, tables and formulas, and adapt font size and paragraph, etc., 10 seconds to complete, safe and efficient.Key words: PaperYes; Layout Technology; AIrtificialIntelligence; Research; Based on;AbstractThe main content of this paper is based on the requirement of paper format in our university, using the artificial intelligence engine of PaperYes, a paper typesetting robot, to compose the paper template. Students can use this template to write papers, just fill the content of the papers under the corresponding headings, to help students solve the problem of paper typesetting. If some students do not use this template to edit papers, you can choose PaperYes paper typesetting. According to the format requirements of your university, automatically generate directories and headers and footers, solve the odd and even page problems, intelligently arrange titles, graphs, tables and formulas, and adapt font size and paragraph, etc., 10 seconds to complete, safe and efficient.Key words: PaperYes; Layout Technology; AIrtificialIntelligence; Research; Based on;AbstractThe main content of this paper is based on the requirement of paper format in our university, using the artificial intelligence engine of PaperYes, a paper typesetting robot, to compose the paper template. Students can use this template to write papers, just fill the content of the papers under the corresponding headings, to help students solve the problem of paper typesetting. If some students do not use this template to edit papers, you can choose PaperYes paper typesetting. According to the format requirements of your university, automatically generate directories and headers and footers, solve the odd and even page problems, intelligently arrange titles, graphs, tables and formulas, and adapt font size and paragraph, etc., 10 seconds to complete, safe and efficient.Key words: PaperYes; Layout Technology; AIrtificialIntelligence; Research; Based on;AbstractThe main content of this paper is based on the requirement of paper format in our university, using the artificial intelligence engine of PaperYes, a paper typesetting robot, to compose the paper template. Students can use this template to write papers, just fill the content of the papers under the corresponding headings, to help students solve the problem of paper typesetting. If some students do not use this template to edit papers, you can choose PaperYes paper typesetting. According to the format requirements of your university, automatically generate directories and headers and footers, solve the odd and even page problems, intelligently arrange titles, graphs, tables and formulas, and adapt font size and paragraph, etc., 10 seconds to complete, safe and efficient.Key words: PaperYes; Layout Technology; AIrtificialIntelligence; Research; Based on;AbstractThe main content of this paper is based on the requirement of paper format in our university, using the artificial intelligence engine of PaperYes, a paper typesetting robot, to compose the paper template. Students can use this template to write papers, just fill the content of the papers under the corresponding headings, to help students solve the problem of paper typesetting. If some students do not use this template to edit papers, you can choose PaperYes paper typesetting. According to the format requirements of your university, automatically generate directories and headers and footers, solve the odd and even page problems, intelligently arrange titles, graphs, tables and formulas, and adapt font size and paragraph, etc., 10 seconds to complete, safe and efficient.Key words: PaperYes; Layout Technology; AIrtificialIntelligence; Research; Based on;AbstractThe main content of this paper is based on the requirement of paper format in our university, using the artificial intelligence engine of PaperYes, a paper typesetting robot, to compose the paper template. Students can use this template to write papers, just fill the content of the papers under the corresponding headings, to help students solve the problem of paper typesetting. If some students do not use this template to edit papers, you can choose PaperYes paper typesetting. According to the format requirements of your university, automatically generate directories and headers and footers, solve the odd and even page problems, intelligently arrange titles, graphs, tables and formulas, and adapt font size and paragraph, etc., 10 seconds to complete, safe and efficient.Key words: PaperYes; Layout Technology; AIrtificialIntelligence; Research; Based on;AbstractThe main content of this paper is based on the requirement of paper format in our university, using the artificial intelligence engine of PaperYes, a paper typesetting robot, to compose the paper template. Students can use this template to write papers, just fill the content of the papers under the corresponding headings, to help students solve the problem of paper typesetting. If some students do not use this template to edit papers, you can choose PaperYes paper typesetting. According to the format requirements of your university, automatically generate directories and headers and footers, solve the odd and even page problems, intelligently arrange titles, graphs, tables and formulas, and adapt font size and paragraph, etc., 10 seconds to complete, safe and efficient.Key words: PaperYes; Layout Technology; AIrtificialIntelligence; Research; Based on;AbstractThe main content of this paper is based on the requirement of paper format in our university, using the artificial intelligence engine of PaperYes, a paper typesetting robot, to compose the paper template. Students can use this template to write papers, just fill the content of the papers under the corresponding headings, to help students solve the problem of paper typesetting. If some students do not use this template to edit papers, you can choose PaperYes paper typesetting. According to the format requirements of your university, automatically generate directories and headers and footers, solve the odd and even page problems, intelligently arrange titles, graphs, tables and formulas, and adapt font size and paragraph, etc., 10 seconds to complete, safe and efficient.Key words: PaperYes; Layout Technology; AIrtificialIntelligence; Research; Based on;AbstractThe main content of this paper is based on the requirement of paper format in our university, using the artificial intelligence engine of PaperYes, a paper typesetting robot, to compose the paper template. Students can use this template to write papers, just fill the content of the papers under the corresponding headings, to help students solve the problem of paper typesetting. If some students do not use this template to edit papers, you can choose PaperYes paper typesetting. According to the format requirements of your university, automatically generate directories and headers and footers, solve the odd and even page problems, intelligently arrange titles, graphs, tables and formulas, and adapt font size and paragraph, etc., 10 seconds to complete, safe and efficient.Key words: PaperYes; Layout Technology; AIrtificialIntelligence; Research; Based on;AbstractThe main content of this paper is based on the requirement of paper format in our university, using the artificial intelligence engine of PaperYes, a paper typesetting robot, to compose the paper template. Students can use this template to write papers, just fill the content of the papers under the corresponding headings, to help students solve the problem of paper typesetting. If some students do not use this template to edit papers, you can choose PaperYes paper typesetting. According to the format requirements of your university, automatically generate directories and headers and footers, solve the odd and even page problems, intelligently arrange titles, graphs, tables and formulas, and adapt font size and paragraph, etc., 10 seconds to complete, safe and efficient.Key words: PaperYes; Layout Technology; AIrtificialIntelligence; Research; Based on;AbstractThe main content of this paper is based on the requirement of paper format in our university, using the artificial intelligence engine of PaperYes, a paper typesetting robot, to compose the paper template. Students can use this template to write papers, just fill the content of the papers under the corresponding headings, to help students solve the problem of paper typesetting. If some students do not use this template to edit papers, you can choose PaperYes paper typesetting. According to the format requirements of your university, automatically generate directories and headers and footers, solve the odd and even page problems, intelligently arrange titles, graphs, tables and formulas, and adapt font size and paragraph, etc., 10 seconds to complete, safe and efficient.Key words: PaperYes; Layout Technology; AIrtificialIntelligence; Research; Based on;AbstractThe main content of this paper is based on the requirement of paper format in our university, using the artificial intelligence engine of PaperYes, a paper typesetting robot, to compose the paper template. Students can use this template to write papers, just fill the content of the papers under the corresponding headings, to help students solve the problem of paper typesetting. If some students do not use this template to edit papers, you can choose PaperYes paper typesetting. According to the format requirements of your university, automatically generate directories and headers and footers, solve the odd and even page problems, intelligently arrange titles, graphs, tables and formulas, and adapt font size and paragraph, etc., 10 seconds to complete, safe and efficient.Key words: PaperYes; Layout Technology; AIrtificialIntelligence; Research; Based on;。
最新中国科学院大学毕业论文设计完整框架优秀漂亮模板汇报

点击添加标题
您的内容打在这里,或者通过复制您的文本后,在此框中选择粘
贴,并选择只保留文字。您的内容打在这里,或者通过复制您的
文本后,在此框中选择粘贴,并选择只保留文字。
国外研究 综述 添加标题
您的内容打在这里,或者通
1
添加标题
您的内容打在这里,或者通 过复制您的文本后,在此框 中选择粘贴。
中国科学院大学毕业论文
毕业论文答辩模板
简单易修改,兼容所有版本! 汇报人:××× 编号: 279227
目录
CONTENTS
相关建议
研究方法与思路 研究成果与应用 论文总结
绪论
关键技术与实践难点
选题背景 研究意义
国内外相关研究综述
绪论
理论基础与文献综述 主要贡献与创新
选题背景
添加 标题
您的内容打在这里,或者通过复制您的文本后,在此框中选择粘 贴,并选择只保留文字。您的内容打在这里,或者通过复制您的 文本后,在此框中选择粘贴,并选择只保留文字。
加文本点击添加文本 点击添加文本
综述
…
点击添加文本点击添
加文本点击添加文本 点击添加文本
… …
点击添加文本点击添
加文本点击添加文本 点击添加文本
… …
点击添加文本点击添
加文本点击添加文本 点击添加文本
… …
主要贡献 与创新 添加标题 添加标题
您的内容打在这里,或者通过复制您的文本后,
在此框中选择粘贴,并选择只保留文字。
研究方案 可行性 STEP 1 STEP 3
STEP 2
添加标题
点击添加文本点 击添加文本点击 添加文本点击
STEP 4
添加标题
添加标题
智能小车设计毕业论文【范本模板】
摘要智能作为现代社会的新产物,是以后的发展方向它可以按照预先设定的模块在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或更高的目标。
本文设计是基于AT89s52微处理器的机器人车体系统和XL02—232AP1微功率无线透明传输模块的无线通信系统,以此实现小车的前进、后退、停止、及直角特别是圆弧形拐弯,本设计主要体现多功能小车的智能模式,设计中的理论方案、分析方法及特色与创新点等可以为自动运输机器人、采矿机器人、家用自动清洁机器人,特别是智能足球机器人的设计与普及有一定的参考意义.同时小车可以作为玩具的发展方向,为中国玩具市场技术含量的缺乏进行一定的弥补,实现经济收益,形成商业价值。
关键词:单片机,智能小车,AT89s52,XL02-232AP1ABSTRACTAs a new product of modern society,intelligence is the trend in future development.It can work in some specific environment according to the mode which sets in advance。
Dispensing with behavior adjustment management,but it can achieve the expected,even higher goal.This design is based on the robot body AT89s52 microprocessor system and XL02-232AP1 transparent micro—power wireless transmission module of the wireless communication system,to achieve the car forward, backward,stop, especially the arc-shaped bend at right anglesThe design mainly reflected a smart-car model,The theoretical scheme,analysis method,uniqueness and innovation etc.that pointed in this paper,I think they are will be certain reference value in design an popularity of automatic or semi—automatic robot such as automatic transportation robot,prospecting robot,cleaning household robot,especially intelligent socce r robot。
大学论文格式模板范文

大学论文格式模板范文大学论文格式模板范文许多毕业生都有拟写毕业论文的任务,以下是小编为大家准备的大学论文格式模板范文,仅供参考!大学论文格式模板范文:民生科技与第六次科技革命〔摘要〕近代以来,世界上大致发生了五次科技革命,这五次科技革命具有一些规律性机理:发生领域从单个学科走向学科群,科学技术从分化走向更高层次的综合;动力来源于科技内部发展需要和社会外部需求;其影响促进人类思维方式、生产方式和生活方式的变革,并使世界科技中心与经济中心不断发生转移;其趋势越来越走向科学革命、技术革命与产业革命一体化。
民生科技作为第六次科技革命的重要领域,解决健康、环保、安全等民生问题是重要动力,将引起人类观念、生产方式、生活方式的变革及世界科技中心和经济中心的转移,与产业的一体化将成为重要趋势。
迎接第六次科技革命,大力发展民生科技,要树立以人为本的和谐科技观,加强民生科技内部发展需要与外部需求的耦合,提高民生科技与相关产业的融合度等。
〔关键词〕民生科技,第六次科技革命,机理,走向,重要维度,现实路径关于科技革命,学界有三次说、四次说、五次说,比较能够达到共识的是五次说。
“第一次是近代物理学诞生,第二次是蒸汽机和机械革命,第三次是电力和运输革命,第四次是相对论和量子力学革命,第五次是电子和信息革命。
” 〔1 〕 2011年以来,《科学时报》《日报》《光明日报》《学习时报》《中国科学基金》《决策》等报刊发表了一系列关于第六次科技革命的论文、调查报告和人物专访。
根据前五次科技革命发生的机理以及专家学者对第六次科技革命的猜测,我认为民生科技是第六次科技革命发生的重要维度。
“民生科技指涉及民生改善的科学技术,是围绕人民群众最关心、最直接、最现实的社会发展重大需求,开展的科学研究、产品开发、成果转换和科技服务。
” 〔2 〕为了迎接第六次科技革命,我们必须大力发展民生科技。
一、前五次科技革命发生的机理及其走向前五次科技革命的发生过程具有一定的规律,把握科技革命发生的规律有助于预测第六次科技革命。
中科大研究生毕业论文撰写标准
中国科学技术大学研究生学位论文撰写规范中国科学技术大学学位办编二○○七年五月中国科学技术大学研究生学位论文撰写规范研究生学位论文集中反映研究生在研究工作中所取得的成果,代表研究生研究工作的水平,也是申请和授予相应学位的主要依据。
为提高研究生学位论文的撰写质量,做到学位论文在内容和格式上的规范化,我们编写了《中国科学技术大学研究生学位论文撰写规范》,供申请学位的研究生参考执行.其中参考文献著录规则我们根据GB/T 7714—2005的标准撰写。
硕士和博士学位论文除在研究深度等方面要求不同外,撰写要求基本一致。
目录第1章内容要求 (1)1。
1 封面 (1)1。
1.1 密级 (1)1.1。
2 论文题目 (1)1.1。
3 作者姓名 (1)1.1。
4 学科专业 (1)1。
1.5 导师姓名 (1)1.1。
6 完成时间 (1)1。
2 中国科学技术大学学位论文原创性和授权使用声明 (1)1.3 摘要和关键词 (1)1。
3.1 中文摘要 (1)1。
3。
2 中文关键词 (1)1.3.3 英文摘要与关键词 (1)1.4 目录 (2)1。
5 符号说明 (2)1.6 正文 (2)1.6。
1 绪论 (2)1。
6。
2 论文主体 (2)1。
6。
3 结论 (2)1.7 参考文献 (2)1。
8 附录 (3)1.9 致谢 (3)1.10 在读期间发表的学术论文与取得的其他研究成果 (3)第2章书写规定 (4)2。
1 论文的字数要求 (4)2.2 文字、标点符号和数字 (4)2。
3 封面与扉页 (4)2。
4 目录 (4)2。
5 摘要与关键词 (4)2。
5.1 摘要 (4)2。
5.2 关键词 (5)2.6 论文正文 (5)2。
6.1 章节及各章标题 (5)2.6。
2 序号 (5)2。
6.3 页眉 (5)2。
6。
4 名词和术语 (6)2.6。
5 量和单位 (6)2.6.6 图和表 (6)2。
6.7 表达式 (7)2。
7 参考文献 (8)2。
中国科学论文模板
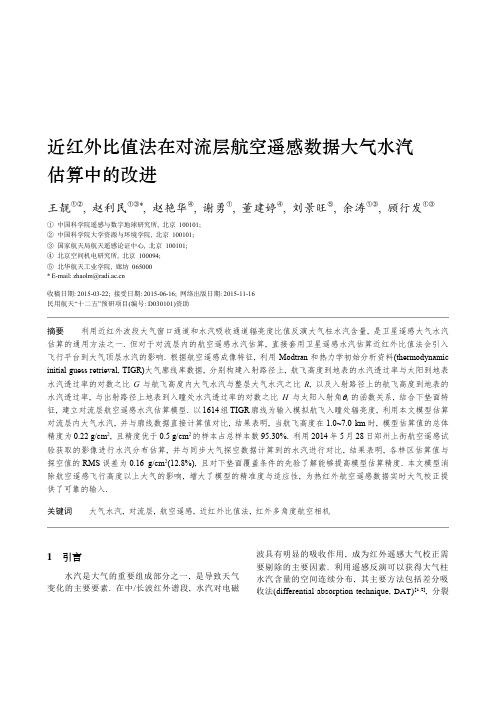
近红外比值法在对流层航空遥感数据大气水汽估算中的改进王靓①②, 赵利民①③*, 赵艳华④, 谢勇①, 董建婷④, 刘景旺⑤, 余涛①③, 顾行发①③①中国科学院遥感与数字地球研究所, 北京100101;②中国科学院大学资源与环境学院, 北京100101;③国家航天局航天遥感论证中心, 北京100101;④北京空间机电研究所, 北京100094;⑤北华航天工业学院, 廊坊065000*E-mail: zhaolm@收稿日期: 2015-03-22; 接受日期: 2015-06-16; 网络出版日期: 2015-11-16民用航天“十二五”预研项目(编号: D030101)资助摘要利用近红外波段大气窗口通道和水汽吸收通道辐亮度比值反演大气柱水汽含量, 是卫星遥感大气水汽估算的通用方法之一. 但对于对流层内的航空遥感水汽估算, 直接套用卫星遥感水汽估算近红外比值法会引入飞行平台到大气顶层水汽的影响. 根据航空遥感成像特征, 利用Modtran和热力学初始分析资料(thermodynamic initial guess retrieval, TIGR)大气廓线库数据, 分别构建入射路径上, 航飞高度到地表的水汽透过率与太阳到地表水汽透过率的对数之比G与航飞高度内大气水汽与整层大气水汽之比R, 以及入射路径上的航飞高度到地表的水汽透过率, 与出射路径上地表到入瞳处水汽透过率的对数之比H与太阳入射角 s的函数关系, 结合下垫面特征, 建立对流层航空遥感水汽估算模型. 以1614组TIGR廓线为输入模拟航飞入瞳处辐亮度, 利用本文模型估算对流层内大气水汽, 并与廓线数据直接计算值对比, 结果表明, 当航飞高度在1.0~7.0 km时, 模型估算值的总体精度为0.22 g/cm2, 且精度优于0.5 g/cm2的样本占总样本数95.30%. 利用2014年5月28日郑州上街航空遥感试验获取的影像进行水汽分布估算, 并与同步大气探空数据计算到的水汽进行对比, 结果表明, 各样区估算值与探空值的RMS误差为0.16 g/cm2(12.8%), 且对下垫面覆盖条件的先验了解能够提高模型估算精度. 本文模型消除航空遥感飞行高度以上大气的影响, 增大了模型的精准度与适应性, 为热红外航空遥感数据实时大气校正提供了可靠的输入.关键词大气水汽, 对流层, 航空遥感, 近红外比值法, 红外多角度航空相机1引言水汽是大气的重要组成部分之一, 是导致天气变化的主要要素. 在中/长波红外谱段, 水汽对电磁波具有明显的吸收作用, 成为红外遥感大气校正需要剔除的主要因素. 利用遥感反演可以获得大气柱水汽含量的空间连续分布, 其主要方法包括差分吸收法(differential absorption technique, DAT)[1,2], 分裂窗法(split-window technique, SWT)[3], 微波法(microwave techniques, MT)[4,5]以及近红外比值法(ratio technique, RT)[6,7]等. 其中由于RT法对载荷仪器噪声、大气及地表的变化具有较低的敏感性, 是一种较为稳定的卫星遥感水汽估算方法[8], 受到广泛应用.热红外航空遥感大气校正的核心在于与飞行同步大气水汽信息的获取. 通过在热红外遥感器上加载-大气窗口通道(如860 nm附近)和水汽吸收通道(如940 nm附近), 可实现红外遥感数据的实时大气校正. 我国研制的红外多角度航空相机(multi-angular infrafred camera, MAIC)安装了4个谱段, 分别为B1 (0.845~0.885 μm), B2(0.915~0.965 μm), B3(10.3~11.3 μm)和B4(11.5~12.5 μm), 其中B1, B2波段能够用于估算地表到航飞高度的高分辨率水汽空间分布信息, 是提高MAIC应用潜力的重要手段. MAIC各通道光谱响应如图1所示.大气水汽主要集中在对流层以内. 对于成像在对流层以上(10 km或更高)的航空遥感, 由于水汽含量在高层大气中极为稀少, 利用RT法估算水汽的过程与卫星遥感相似[9]. 但是为获取较高分辨率航空影像, 热红外航空遥感飞行高度一般位于2~5 km的对流层之内, 航飞高度之上的大气水汽不可忽略. 如果直接套用卫星遥感水汽估算中的RT法, 会额外引入航飞高度之上水汽吸收造成的影响, 从而高估地表到航飞高度之间的水汽, 降低大气订正精度.RT法的核心参数为近红外波段大气窗口通道和水汽吸收通道入瞳辐亮度之比T w, 通过建立该比值与水汽的函数关系可以估算水汽空间分布. 但是在对流层内, T w与水汽的关系是随着航飞高度变化的. 选用1614条热力学初始分析资料(thermodynamic initialguess retrieval, TIGR)大气廓线数据, 包括陆地与海洋区域, 其中编号1~872为热带(tropical)廓线, 编号873~1260为温带(mid-lat1)廓线, 以及编号1261~1614为温带冬季与亚寒带夏季(mid-lat2)廓线. 利用Modtran4.0模拟MAIC在不同航高成像时, T w 随地面到航高水汽的变化规律, 如图2所示. 当航高在 5 km以上时, 航空器之上的大气水汽较为稀薄, 对太阳-地表-传感器路径上的水汽透过率贡献较小. 对于不同廓线数据, 入瞳辐亮度之比与水汽呈现良好的负相关关系, 在散点图中的分布相对平缓稳定; 当航高在5 km以下时, 入瞳辐亮度之比与水汽的负相关关系开始减弱, 且不同廓线数据散点图的变化相对剧烈. 因此, 在利用RT法从对流层(尤其是5 km 以内的低空)航空遥感数据中估算水汽时, 必须针对太阳-地表-航空器的大气辐射传输路径特征进行算法修正, 以消除飞行高度变化对水汽估算精度的影响.本文根据MAIC工程参数, 针对传统比值法在航空遥感水汽估算中的局限性, 结合大气辐射传输模拟软件Modtran4.0和TIGR大气廓线数据的垂直分层资料进行模拟, 建立考虑航空相机飞行高度及太阳入射角的近红外两通道比值法的对流层航空遥感水汽估算改进模型, 并利用模拟数据和实际航空遥感数据, 对模型的精度进行验证分析.图1 MAIC各通道光谱响应图2 MAIC B2, B1通道入瞳辐亮度之比T w 与地面到航高大气水汽关系散点图2 近红外水汽反演原理在1 μm 附近的近红外波段, 传感器在某一波长λ所接收到的入瞳辐射可简化为sensor sun ()()()()(),p L L L λλτλρλλ=+(1)式中L sensor (λ)为传感器入瞳辐亮度; L sun (λ)为大气顶 层的太阳入射辐亮度; τ(λ)为太阳-地面-传感器路径透过率, 包含了传输路径上的大气吸收信息; ρ(λ)为地表双向反射率; L p (λ)为路径上分子与气溶胶的散射辐射项. 晴空条件下, 近红外波段大气气溶胶光学厚度很小, 散射辐射L p (λ)的作用与(1)式右端第一项直接反射项相比, 可忽略不计[10], 因此(1)式可表示为 sensor sun ()()()().L L λλτλρλ=(2) 令_path surface sun =,T T T τ⋅⋅w w(3)式中T w =L sensor (940)/L sensor (860), 为传感器入瞳处吸收通道(940 nm 附近)和窗口通道(860 nm 附近)等效辐亮度之比; τw _path =τpath (940)/τpath (860), 为传输路径上的对应通道等效水汽透过率之比, 其中τpath (860)作为大气窗口通道透过率, 其值相对稳定且接近于1(图1), 因此τw _path 实际上能表征水汽吸收通道的路径透过率; T surface =ρ(940)/ρ(860)为传输路径上的对应通道等效地表反射率之比; T sun =L sun (940)/L sun (860)为对应通道在大气顶层的等效太阳辐照度之比. 研究发现[7,8,10], 860和940 nm 附近的地物反射率基本相等或成线性变化, T surface 相对稳定; T sun 根据大气层外太阳辐亮度计算获得. 因此水汽的透过率τw _path 就可以通过计算T w 得到,进而由τw _path 估算大气水汽含量.3 航空遥感近红外水汽反演算法3.1 算法设计τw _ss , 入射路径上太阳到地表的水汽透过率; τw_sz , 入射路径上太阳到MAIC 航空遥感成像高度Z 的水汽透过率; τw_zs , 入射路径上MAIC 所在高度Z 到地表的水汽透过率; τw_sm , 出射路径上地表到MAIC 的水汽透过率; W , 整层大气柱水汽含量; W z , 地表到航高Z 区间的大气柱水汽含量对940 nm 通道电磁波传输路径(太阳-地表- MAIC)上的水汽透过率τw_path 进行分段考虑(以下所涉及透过率均为水汽透过率), 可表示为入射路径上τw_ss 与反射路径上τw_sm 的乘积, 如下式: path __ss _.w w w sm τττ=⋅ (4) 在入射路径中,根据辐射传输公式, 水汽透过率可表示为τw =exp(m h ), 其中m 为相对大气质量, 与传输路径及太阳入射角度有关, h 为水汽光学厚度, 与大气水汽的垂直分布有关. τw_ss 与τw_zs 取对数可得到__ln(),ln()w ss ss ssw zs zs zsm h m h ττ=⋅ (5)上式可简化为G 函数, 与水汽垂直分布W v 以及太阳入射角θs 有关__ln()(,),ln()w ss v s w zs G W τθτ= (6)(,)__.vsG W w ss w zsθττ= (7)同理, τw_zs 与τw_sm 对数比值受到太阳入射角θs , 传感器观测角θo 以及地面到飞行高度水汽含量W z 的影响, 定义为H 函数, 如下式:__ln()(,,),ln()w zs s o z w sm H W τθθτ=(8) (,,)__.so zH W w zs w smθθττ= (9) 由(3), (4), (7)和(9)式可得surface sun 1_.G H w w sm T T T τ⋅+=⋅⋅(10)研究表明[11~13], 大气水汽透过率τw 和大气可降水量关系可用如下形式表示:(exp ,w z b W τ=-(11)式中b 0与仪器通道的中心波长和半波宽度以及波段图3 (网络版彩图)航空遥感水汽估算模型参数几何关系响应函数有关. 合并(10)和(11)式可得surface sun 0exp (1).w z T T T b G H W ⎡⎤=⋅⋅-⋅⋅+⎣⎦(12)3.1.1 G 函数设计定义参数R , 其含义为地表到航高Z 的水汽W z与整层大气水汽W 之比.z R W W =(13)计算1614条TIGR 廓线下R 值. 利用Modtran4.0模拟太阳入射角角为0°时, 不同观测高度(1, 3, 5, 7 km)下MAIC B1, B2通道的τw_ss 与τw_zs , 并由(7)式计算得到G (W v , 0). 分析G 与R 的关系, 绘制散点图, 发现二者表现为明显的幂指数形式(G =aR b ), 如图4所示.G 不仅受到R 的影响, 还与太阳入射角θs 有关. 以TIGR 廓线为样本数据, 当航高Z 为3 km 时, 0°太阳入射角与60°太阳入射角下G 值的差异集中在[-0.02, 0.02], 该误差对水汽估算影响的敏感性分析见4.2节.3.1.2 H 函数设计H 函数为地面S 到航高Z 之间, 入射路径与出射路径上940 nm 水汽透过率对数之比, 如(8)式所示. 航空遥感主要以垂直下视成像居多, 本文仅考虑天顶观测(θo =0°)的情况.不同航高, 不同廓线可计算出不同的W z , 将图4 基于TIGR 数据绘制的G(W v , 0°)与R 关系散点图TIGR 廓线数据输入Modtran4.0, 模拟1, 3, 5, 7 km 航高条件下的W z 值以及MAIC B1, B2通道的τw_zs 与τw_sm , 并由(8)式计算得到H . 模拟不同太阳入射角θs 条件下, H 与W z 的关系, 结果如图5(a)所示. 由图发现θs 对H 的影响非常显著: H 随着θs 的增大而增大, H (θs =10°)与H (θs =60°)的平均差值可达到0.4415. 可见对H 的估算必须考虑太阳入射角的变化. 水汽含量W z 的变化对H 的影响相对较小: 尤其当θs 小于50°时, H 几乎不受到水汽变化的影响. 因此在实际计算H 时可考虑忽略参数W z 的影响, 特别针对低太阳入射角条件. 计算图5(a)中不同θs 时H 的平均值, 分析H 与θs 的关系, 结果如图5(b)所示. 发现二者表现为明显的二次方形式, 即H =c 1θs 2+c 2θs +c 3.分大气模式考虑, 在太阳入射角为40°, 50°时, 忽略水汽含量的影响对估算H 所带来的误差主要集中在[-0.008, 0.008]以内, 在太阳入射角为60°时误差范围会增大到[-0.012, 0.012]. 该误差对最终Wz 估算造成的影响分析见4.2节.3.2 对流层航空遥感大气水汽估算模型根据上述分析, (12)式可写成 {}0exp [()()1],w s z T b G R H W αθ=-+(14) 其中,surface sun ln(),T T α=⋅(15) 1(),b G R R = (16)2234().s s s H b b b θθθ=++(17)利用Modtran4.0模拟不同条件下MAIC B2与B1的入瞳辐亮度比值T w , 回归计算得到下垫面为植被(veg), 土壤(soil)条件下不同大气模式对应的α, b 0~b 4, 各参数取值如表1所示. 其中, 由于T surface 与 地物覆盖类型有关, 本文考虑了9类地物, 包括4类植被(针叶林, 落叶林, 草地, 混合植被)和5类土壤(黏土, 粉砂土壤, 粉质黏土, 沙质土壤, 混沙土壤). 其他Modtran 模拟输入条件包括: 太阳入射角度为10°~60°; 垂直下视观测, 观测高度为1, 3, 5, 7 km.4 航空遥感水汽估算误差敏感性分析4.1 R 值估算误差敏感性分析本文模型中, R 的估算误差直接影响到W z 的估算精度. 定义W z 估算误差δW 如下[14]:()(),W W R R W R δδ=+- (18)δR 为参数R 可能出现的误差, W (R +δR )与W (R )为利用(14)式分别在R +δR 和R 下计算得到的水汽含量. 计算过程中选择如下典型条件: 1) 大气模式为Mid-lat1; 2) 地表覆盖类型为植被.大部分观测条件下, 入瞳辐亮度之比T w 集中在[0.2, 0.8], 本文设定T w =0.452(为所有观测条件下的平均值), 并选取太阳入射角θs 分别为20°和50°的情况进行分析(图6).由图6可看出, 本文算法中δR 对δW 的影响较为显著: 典型条件下, 如果R 的计算误差δR =0.05, 则将表1 回归计算得到的α, b 0~b 4地表类型 大气模式 α b 0 b 1 b 2 b 3 b 4 R 2 植被Troplical 0.17173 0.22297 -0.63000 0.00014 -0.00286 1.18203 0.982 Mid-lat1 -0.07448 0.23504 -0.59641 0.00015 -0.00333 1.37024 0.969 Mid-lat2 -0.04682 0.22260 -0.56863 0.00017 -0.00374 1.64628 0.955 土壤Troplical -0.05877 0.17808 -0.57851 0.00017 -0.00348 1.84872 0.953 Mid-lat1 0.02454 0.20357 -0.55910 0.00018 -0.00385 1.88646 0.928 Mid-lat20.054750.17376-0.518100.00022-0.005022.638710.902图5 H 与W Z 及θs 的关系散点图图6 R估算误差引起的水汽估算误差导致水汽产生0.12 g/cm2左右的误差. 算法受太阳入射角θs的影响并不显著: 当R=[0.1, 0.8], δR=[0.01, 0.2]时, δW(θs=20°)与δW(θs=50°)的最大差值为0.07 g/cm2; 以水汽比值R=0.45, δR=0.1为例, 当θs=20°时, δW=0.22 g/cm2, 当θs=50°时, δW=0.24 g/cm2, 两种θs 条件下水汽估算误差仅相差0.02 g/cm2. 同时, δW受到R的影响也较不显著: 以太阳入射角θs=20°为例, R 由0.1变化至0.8, δW的变化范围在0.1 g/cm2之内, 且随着R的增大, δW的变化更加趋于平缓.模拟结果显示, 90%以上的T w值在[0.2, 0.8], 故上述对于T w=0.452时的分析仅显示了一个平均水平. 图7显示了不同T w下水汽估算误差的变化规律. 前文分析可知, 太阳入射角θs对δW的影响微小, 因此图7中δW为θs在5°~60°下δW的平均值. 可以看出, 在一定的δR误差条件下, δW随T w的增大而减小, 且这一变化的速度随δR的增大而增大. T w逆向表征水汽的高低, 因此图7说明水汽的估算误差将随水汽的升高而升高.图7 不同T w条件下R估算误差引起的水汽估算误差图7还可以作为估计不同条件下δR 所造成的水汽估算精度的依据, 即可从图中查找不同T w , R 及δR 下对应的δW 作为水汽估算精度. 例如, T w =0.4, R = 0.5, δR =0.05时, 水汽估算精度可达到0.19g/cm 2. 当δR 0.05时, 本算法可保证在所有观测条件下水汽的估算精度优于0.7 g/cm 2; 当δR 0.1时, 水汽的估算最低优于1.0 g/cm 2, 且仅当T w <0.3时水汽估算精度会劣于0.5 g/cm 2, 而这也将是较为极端的潮湿大气条件.4.2 G , H 误差敏感性分析G 函数和H 函数均由各自的显著因子经曲线拟合得到, 忽略非显著因子的影响会产生函数拟合误差, 进而导致W z 出现误差. 水汽估算误差δW 与G , H 计算误差的关系如下[15,16]:22202(ln )(1)w y T WW x x x b G H αδδδ-∂=⋅=-∂⋅+,(19)式中x , y 分别代表G , H 或者H , G . δx 代表对应项的计算误差.由3.1可知, 忽略θs 的影响所带来G 值的计算误差主要分布在[-0.02, 0.02]. 假设δG =0.02, 考虑典型条件, 设定T w =0.452, θs =30°, 得H =1.405. 代入(19)式, 计算得到当G 值在[1.0, 4.0]时, δG 导致的水汽估算误差在0.032 g/cm 2以内, 因此G 函数的设计可忽略θs 的影响.同样地, 由3.1可知忽略Wz 的影响H 的计算误差主要集中在[-0.012, 0.012]. 假设δH =0.012, 考虑典型条件, 设定T w =0.452, R =0.8,得G =1.142, 代入(19)式, 计算得到当H 值在[1.0, 1.7]时, δH 导致的水汽估算误差在0.009 g/cm 2以内, 因此H 函数的设计可忽略Wz 的影响.5 算法验证分别利用Modtran4.0模拟数据与MAIC 航空遥感数据对算法精度进行验证, 定义水汽估算误差如下:realalg 2__RMS (),Z Z WW N =-∑(20)式中W Z_real 代表真值, 由探空廓线计算得到, W Z_alg 代表本文算法估算值, N 为参与计算的样本数量.5.1 Modtran 4.0模拟验证利用Modtran4.0模拟MAIC B1, B2通道表观辐亮度, 输入条件为: 1) 天顶观测; 2) θs ∈[10°, 60°], 步长为5°; 3) 航飞高度Z ∈[1 km, 7 km], 步长为1 km; 4) TIGR 廓线编号1~1614. 根据本文中提到的算法计算地表到航飞高度之间的大气水汽含量W Z_alg , 并与利用TIGR 水汽廓线直接计算得到的水汽含量W Z_TIGR 进行比较, 如图8所示.利用本文中的方法1~7 km 观测高度下水汽的估算可以得到很好的结果, 如图8(a), 整体RSM 可达到0.2243 g/cm 2, 且估算误差小于0.25 g/cm 2的样本占总样本数的80.65%, 误差小于0.5, 0.8 g/cm 2的样本分别占总样本数的95.30%, 99.38%, 如图8(b)所示.表2显示了不同条件下水汽估算误差的分布. 本算法在水汽含量较小的情况下反演精度较高, 当水汽含量小于3 g/cm 2时, RMS 小于0.25 g/cm 2, 而当水汽含量大于3 g/cm 2时, RMS 主要分布在0.3~0.4 g/cm 2.本算法中H 函数是针对太阳入射角的校正项, 因此本算法水汽估算误差受到太阳入射角的影响较图8 (网络版彩图)航空飞行高度水汽模型估算值与探空廓线计算值对比(a) 散点图; (b) 差值直方图表2 不同观测条件下的水汽估算误差大气模式水汽范围W Z (g/cm2) 太阳入射角θs (°)0~1 1~2 2~3 3~4 4~5 5~6 <10 10~20 20~30 30~40 40~50 50~60Troplical 0.1170 0.1852 0.2469 0.2996 0.3549 0.4500 0.3171 0.2894 0.2831 0.2767 0.2719 0.2440 Mid-lat1 0.0975 0.1577 0.2461 0.3881 0.1558 0.1420 0.1385 0.1336 0.1266 0.0970 Mid-lat2 0.0876 0.1536 0.2972 0.1162 0.1063 0.1033 0.0991 0.0935 0.0728小. 可以看到, 本算法在太阳入射角较大时, RMS较低, 而随着太阳入射角的减小, RMS反而有所升高.本算法主要消除了水汽比值R对水汽估算精度的影响, 因此, RMS随R的变化并不明显, 且在大部分情况下, RMS均低于整体水平0.2243 g/cm2, 仅在热带模式下, R大于0.7时, RMS大于0.26 g/cm2, 这也与热带模式下水汽含量较高有关.5.2 航空遥感试验验证利用MAIC相机拍摄的地面影像验证该算法的实际应用精度. 试验区位于河南郑州上街机场附近(34°50.5′N, 113°16.3′E), 航飞区域内地形平坦, 包含城镇, 农田, 水体, 工业设施等典型地物. 选择晴朗无云时间段开展航空成像试验. MAIC航空成像的航高海拔为3134 m(对应地面高度3 km), 成像时间为2014年5月27日08:30(UTC), 2014年5月28日07:00(UTC), 计算得到测区内太阳入射角分别为48.8°和36.6°. 飞行过程中采用佳能5D Mark III同步获取真彩色影像数据, 几何校正后结果如图9(a).飞行后在实验室利用积分球对MAIC相机B1, B2通道进行绝对辐射定标与非均匀性校正,得到飞行高度的通道辐亮度数据, 再利用同步POS数据对CCD扫描数据进行几何校正.选择下垫面类型为植被(veg), 大气模式为中纬度温带(Mid-lat1). 由表1, α=-0.07448, b0=0.23504, 并算得G=1.1872, H=1.4493, 其中R=0.745,5月27日θs=48.8°,5月28日θs=36.6°. 将上述参数带入(14)式, 图9(b), (c)为利用本文算法计算得到的地面到飞行高度水汽的空间分布. B1, B2波段间配准误差导致水汽分布图仍表现出一定的地物纹理特征, 但总体而言,估算结果直方图分布较为集中(图10(b)), 5月28日像元均值为1.16 g/cm2, 标准差为0.23. 如果选择下垫面类型为土壤, 由表1及(14)式得到的水汽影像均值为1.35 g/cm2, 标准差0.23. 相同方法可得到5月27日选择下垫面类型为植被, 水汽影像均值为1.04 g/cm2, 标准差0.16(图10(a)).试验中通过释放气象探空气球与飞行同步获取了测区内的大气参数, 包括温度, 湿度, 压力等垂直廓线数据, 5月27日数据采集时间为08:04~08:57 (UTC), 5月28日数据采集时间为06:44~07:33(UTC). 计算得到地面到飞行高度的大气水汽含量分别为1.12, 1.25 g/cm2. 将该结果作为真值, 与飞行区域水汽航空遥感估算平均值相差在0.1 g/cm2以内.选取测区内17处样本区, 如图9(a). 其中编号1~8为小麦地, 编号9~12为草地, 编号13为裸土, 编号14为稀疏草地(草地与裸土混合), 编号15~17为建筑物(道路、房顶等不透水面). 1~12, 14号样区以MidLat1-Veg模式计算, 13, 15~17号样区以MidLat1- soil模式计算, 14号样区分别利用MidLat1-Veg, MidLat1-soil模式计算, 计算得到5月27日1~17号样本区水汽估算误差RMS=0.14 g/cm2(12.5%), 平均水汽1.05 g/cm2. 5月28日1~17号样本区水汽估算误图9 (网络版彩图)MAIC航空遥感成像(a) 试验区概况; (b)和(c) 5月27日、28日地表到飞行高度水汽分布图10 飞行试验区水汽遥感估算结果统计信息(a) 2014年5月27日; (b) 2014年5月28日差RMS=0.16 g/cm2(12.8%), 平均水汽为1.32 g/cm2, 比利用探空数据计算得到的水汽含量高出5.4%.不同地物覆盖模式下, 各样区水汽估算精度统计结果如表3. 表中T surface=ρ940 nm/865 nm, 为实地测得的地物反射率光谱曲线经MAIC B2, B1光谱响应函数卷积后的两通道反射率比值, 稀疏草地的T surface为草地和土壤样区的平均值. 由表3可知, 小麦地、草地及裸土在各自下垫面模式的水汽估算结果较好, 样区RMS误差在0.172 g/cm2以内, 且水汽平均值与探空气球测量结果相差在±0.1 g/cm2之内. 稀疏草地样本区为草地与裸土的混合类型, 主要以草地为主, 故以MidLat1-Veg模式计算精度较高, RMS=0.18 g/cm2左右. 建筑区水汽估算精度较低, RMS误差可高达0.2133 g/cm2(17.1%), 5月28日样区水汽平均值高出探空气球测量结果13.3%.如本文第2节所述, 近红外遥感水汽估算的基本假设是1 μm附近大部分地物的地表反射率随波长近似相等或成线性变化, 进而由T surface估算大气水汽. 事实上, 不同地物种类(尤其是植被与非植被), 其地表反射率随波长的变化规律会有所差异[17], 因此T surface值不仅包含了水汽信息, 还包括了地表覆盖类型差异导致的扰动, 从而引起水汽估算误差. 这说明RT水汽估算对于地物覆盖具有一定的依赖性, 具备地表覆盖的先验知识能够提高模型精度. 例如, 建筑区水汽估算采用了土壤模式, 但该区域内的T surface真实值比土壤区要低, 导致参数α产生误差, 进而导致一定的水汽估算误差. 这一现象在其他样本区也有体现: 例如将稀疏草地样本区的水汽估算模式调整为土壤模式时, 同样会高估T surface, 导致的5月27日水汽航空遥感估算RMS误差为0.18 g/cm2(16.4%), 5月28日RMS误差则达到0.33 g/cm2(26.6%).6结论与讨论利用对流层近红外波段航空数据估算水汽, 不仅可以获得详尽的水汽空间分布, 还可以通过调整飞行高度获得地表到不同高度处的水汽, 为热红外航空遥感的实时大气校正提供可靠的输入, 提高其在资源环境遥感, 卫星产品真实性检验等方面业务化运行的能力, 同时也为水文, 气象等领域相关研究表3 不同下垫面条件下近红外航空遥感水汽估算误差日期地物类型(计算模式)小麦地(MidLat1-Veg)草地(MidLat1-Veg)裸土(MidLat1-soil)稀疏草地(MidLat1-Veg)稀疏草地(MidLat1-soil)建筑物(MidLat1-soil)5月27日均值(g/cm2) 1.0357 1.0712 1.0372 1.1903 1.0204 1.0864 RMS (g/cm2) 0.1547 0.1080 0.1117 0.1716 0.1832 0.14765月28日均值(g/cm2) 1.1933 1.2058 1.3651 1.3416 1.5399 1.4157RMS (g/cm2) 0.1720 0.1093 0.1381 0.1883 0.3319 0.2133 T surface 1.0045 0.9906 1.0168 1.0037 1.0037 0.9994提供更为准确的对流层水汽分布信息.本文基于近红外卫星遥感水汽估算原理, 结合MAIC通道特征, 修正了航空相机飞行高度以上的大气对对流层水汽估算的影响, 建立了对流层航空遥感水汽估算模型. 模型考虑了对流层内某高度水汽与整层大气水汽之间的比例关系, 并兼顾太阳入射角, 大气模式以及地表覆盖特征等的影响, 使近红外航空数据的水汽估算摆脱了飞行高度的限制, 增大了模型的适用性.利用该模型估算对流层大气水汽含量需要底层水汽占整层大气水汽含量的比值R作为输入, R的准确性直接影响水汽的估算精度. 一般情况下, R可利用相应地理位置和季节的探空廓线数据计算得到. 如果没有探空资料, 本文附录给出了利用TIGR探空廓线计算得到的不同航高和大气模式下R的取值. 当R的误差δR0.1时, 本文模型在大多数晴空大气条件下水汽的估算值优于0.5 g/cm2, 对于为潮湿的气象条件, 模型仍能保持优于1.0 g/cm2的估算精度. 利用实际航空遥感数据进行水汽估算与验证, 结果表明研究区内的水汽估算结果平均RMS误差在0.16 g/cm2(12.8%)之内, 仅建筑区水汽估算精度相对较低, 28日RMS误差为0.2133 g/cm2(17.1%).本文模型具有较强的适用性, 适合对流层内不同航高, 不同大气模式以及多种下垫面条件下水汽的估算. 实际应用中, 根据对下垫面环境的先验了解, 有针对性地选择地物覆盖模式和大气模式, 再由表3选取合适的模型参数, 可进一步提高水汽估算精度.需指出的是, 本文在模型建立过程中, 下垫面类型主要考虑了植被与土壤两类. 对于人工建筑区域, 下垫面类型可用土壤模式代替且能保持一定的精度. 随着社会的发展, 地表覆盖类型不断增多, 不透水面等人工覆盖类型已不容忽视, 以后的研究中需要进一步考虑加入人工建筑地表下的水汽反演模式.另一方面, 航空飞行高度Z决定了参数R的取值. 尽管本文附录里给出的R值查找表, 但该表中航高的步长为1 km, 限制了更多航高下水汽估算的灵活性. 在下一步研究中, 将考虑用航高Z作为核心参数建立改进模型, 进一步拓展模型的适用性. 与此同时, 本文模型只考虑了无云情况, 而低空云层对水汽含量的估算精度会产生一定影响, 因此还需在更多的大气和地表环境条件下开展航空遥感试验, 更加全面客观地验证模型精度.致谢郑州上街MAIC航空遥感试验在董建婷、占文凤、佃袁勇、赵峰、白伟华、万玮等65人的通力协助下得以顺利实施, 在此深表谢忱.附录: R值查找表大气模式飞行高度(km)1 2 3 4 5 6 7Troplical 0.339±0.087 0.575±0.108 0.725±0.092 0.824±0.074 0.890±0.060 0.934±0.041 0.963±0.024 Mid-lat1 0.350±0.091 0.589±0.110 0.745±0.093 0.848±0.069 0.913±0.049 0.952±0.032 0.974±0.019 Mid-lat2 0.351±0.087 0.598±0.105 0.756±0.093 0.855±0.073 0.916±0.054 0.951±0.038 0.972±0.027参考文献1Carrere V, Conel J E. Recovery of atmospheric water-vapor total column abundance from imaging spectrometer data around 940 nm- sensitivity analysis and application to airborne visible infrared imaging spectrometer (aviris) data. Remote Sens Environ, 1993, 44: 179–2042Bouffies S, Tanre D, Breon F M, et al. Atmospheric water vapor estimate by a differential absorption technique with the polarisation and directionality of the Earth reflectances (POLDER) instrument. J Geophys Res-atmos, 1997, 102: 3831–38413Ottle C, Outalha S, Francois C, et al. Estimation of total atmospheric water vapor content from split-window radiance measurements.Remote Sens Environ, 1997, 61: 410–4184Payne V H, Mlawer E J, Cady-Pereira K E, et al. Water vapor continuum absorption in the microwave. IEEE T Geosci Remote, 2011, 49: 2194–22085Chang A T C, Wilheit T T. Remote-sensing of atmospheric water-vapor, liquid water, and wind speed at the ocean surface by passive microwave techniques from the nimbus-5 satellite. Radio Sci, 1979, 14: 793–8026Albert P, Bennartz R, Bennartz R, et al. Remote sensing of atmospheric water vapor using the moderate resolution imaging spectroradiometer. J Atmos Ocean Tech, 2005, 22: 309–3147Kaufman Y J, Gao B C. Remote sensing of water-vapor in the near IR from EOS/MODIS. IEEE T Geosci Remote, 1992, 30: 871–8848Sobrino J A, El-Kharraz J, Li Z L, et al. Surface temperature and water vapor retrieval from MODIS data. Int J Remote Sens, 2003, 24: 5161–51829Menzel M K, King M D, Menzel W P, et al. Airborne scanning spectrometer for remote sensing of cloud, aerosol, water vapor, and surface properties. J Atmos Ocean Tech, 1996, 13: 777–79410Gao B C, Goetz A F H. Column atmospheric water vapor and vegetation liquid water retrievals from airborne imaging spectrometer data. J Geophys Res-Atmos, 1990, 95: 3549–356411Reagan J A, Pilewskie P A, Scott-Fleming I C,et al. Extrapolation of earth-based solar irradiance measurements to exoatmospheric levels for broad-band and selected absorption-band observations. IEEE T Geosci Remote, 1987, 25: 647–65312Frouin R, Deschamps P Y, Lecomte P. Determination from space of atmospheric total water-vapor amounts by differential absorption near 940 nm: Theory and airborne verification. J Appl Meteor, 1990, 29: 448–46013Halthore R N, Eck T F, Holben B N, et al. Sun photometric measurements of atmospheric water vapor column abundance in the 940-nm band. J Geophys Res-Atmos, 1997, 102: 4343–435214Qin Z, Dall’Olmo G, Karnieli A, et al. Derivation of split window algorithm and its sensitivity analysis for retrieving land surface temperature from NOAA-dvanced very high resolution radiometer data. J Geophys Res-Atmos, 2001, 106: 22655–2267015Jiménez-Muñoz J C, Sobrino J A. Error sources on the land surface temperature retrieved from thermal infrared single channel remote sensing data. Int J Remote Sens, 2006, 27: 999–101416赵利民, 余涛, 田庆久, 等. HJ-1B热红外遥感数据陆表温度反演误差分析. 光谱学与光谱分析, 2010, 30: 3359–336217胡秀清, 黄意玢. 利用940 nm卫星遥感数据反演大气水汽的方法比较与应用分析. 气象科技, 2010, 38: 581–587 Improvement of near infrared ratio method in troposphere water vapor estimation with airborne remote sensing dataWANG Liang1,2, ZHAO LiMin1,3, ZHAO YanHua4, XIE Yong1, DONG JianTing4, LIU JingWang5, YU Tao1,3 & GU XingFa1,31Applied Earth Observation System Division, Institute of Remote Sensing and Digital Earth, Chinese Academy of Sciences, Beijing 100101, China;2School of Chemistry and Chemical Engineering, University of Chinese Academy of Sciences, Beijing 100101, China;3The Center for National Spaceborne Demonstration, Beijing 100101, China;4Beijing Institute of Space Machinery and Electricity, Beijing 100094, China;5North China Institute of Aerospace Engineering, Langfang 065000, ChinaUsing near-infrared radiance ratio between absorption channel (940 nm) and window channel (860 nm) to estimate water vapor content is a common method to retrieve water vapor with remote sensing data. For troposphere water vapor estimation with airborne remote sensing data, ready-made near-infrared ratio method introduces the influence of moisture between flight platform and the top of atmosphere. According to the aerial infrared camera image characteristics, using Modtran and TIGR data, define the following parameters: 1) R, the ratio between the water vapor content from surface to flight platform and the total atmospheric water vapor content; 2) G, the logarithm ratio between the water vapor transmittance from flight platform to land surface and the one from sun to。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
日 期: 日 期:
摘 要
(注释:本文红色字体为写作说明信息,全部格式均可直接套用于正式论文写作中!)
摘要是全文的高度概括和浓缩,一般为“三段式”结构,即:开头、展开、结尾。
开头段:精练说明研究背景和目的(100~200字);
展开段:进一步阐明论文的容,包括研究方法和研究成果,要突出说明本论文的研究成果的特点或创新所在(300~600字);本段必须提炼出作者自己完成的主要工作成果或创新点所在,形如:
页眉从中文摘要开始,容与该部分的标题相同。
页码从第一章(绪论)开始按阿拉伯数字(1,2,3……)连续编排,之前的部分(中文摘要、Abstract、目录等)用大写罗马数字(Ⅰ,Ⅱ,Ⅲ……)单独编排。
排版及印刷要求
纸要求及页面设置
要 求
纸
A4(210×297),幅面白色
页面设置
上、下3.8cm,左、右3.2cm,页眉、页脚3.0cm,装订线0 cm
作者签名:
日 期:
中国科学院大学直属院系
学位论文授权使用声明
本人完全了解并同意遵守中国科学院有关保存和使用学位论文的规定,即中国科学院有权保留送交学位论文的副本,允许该论文被查阅,可以公布该论文的全部或部分容,可以采用影印、缩印或其他复制手段保存、汇编本学位论文。
涉密的学位论文在解密后适用本声明。
作者签名: 导师签名:
Times New Roman 小四,行距20磅,段前段后0磅
关键词
同上,“关键词”三字加粗
同上,“Key Words”两词加粗
目录
示例
要 求
标题
黑体三号加粗居中;单倍行距,段前0.5行,段后1行
各章目录
第2章 格式要求………………8
黑体小四号,单倍行距,段前0.2行,段后0磅,两端对齐,页码右对齐
备注:论文双面装订,奇数页眉为本节标题如“摘要”、“目录”、“第一章 绪论”等等,偶数页统一为论文题目。因此,“摘要”、“目录”、“第一章 绪论”等等大的分节都应从奇数页开始,若某章节结束为奇数页,则可以人为增加空白页作为偶数页
Abstract
Abstract容与中文摘要相对应,在语法、用词上应准确无误,但必须避免生硬的逐字、逐句机械地转换成英语,形成带有明显汉语痕迹的Chinglish(中式英语)!
篇眉
宋体五号居中,Abstract部分用Times New Roman体五号
页码
宋体五号居中
中、英文摘要
中文摘要
英文摘要
标题
摘要:黑体三号加粗居中,单倍行距,段前1.2行,段后1行
Abstract:Times New Roman 三号加粗居中,单倍行距,段前1.2行,段后1行
段落文字
宋体小四,行距20磅,段前段后0磅Mont Nhomakorabea, Year
中国科学院大学直属院系
研究生学位论文原创性声明
本人重声明:所呈交的学位论文是本人在导师的指导下独立进行研究工作所取得的成果。尽我所知,除文中已经注明引用的容外,本论文不包含任何其他个人或集体已经发表或撰写过的研究成果。对论文所涉及的研究工作做出贡献的其他个人和集体,均已在文中以明确方式标明或致。
所有外文缩写首次出现必须给出全称。如果全文缩写较多,应在论文最后专门做一缩略语附表,说明每个缩略语的含义。
关键词:(罗列5个左右的关键词,用“,”分开。关键词是指论文中最主要、最关键的、重复率最高的词或词组,多用名词。关键词的功能在于使读者据名猜意,了解全篇主旨。一般从标题或摘要中选取,这部分一般是最重要的部分)
“作者完成的主要工作如下:”
(1)××××××
(2)××××××
。。。。。。
结尾段:给出研究的主要结论,并指出结论的意义(100~200字)。
论文摘要写作应避免过于简短,避免句子结构太呆扳,避免使用非规的缩略语,一般不用疑问句和感叹句。
中文摘要力求语言精炼准确,一般为500~1000字(以汉字计)。摘要中不要出现图片、图表、表格或其他插图材料,不要出现参考文献引用。
备注: “本文”应翻译为“this thesis”,不要翻译为“this paper”或“this article”。
Key Words:(对中文关键词相对应,用词应准确无误)
第一章
总体要求
工程硕士研究生学位论文(以下简称学位论文)应用汉字撰写,一般不少于3万字(按印刷页数统计字数,图、表均纳入统计,平均每页约折合800字,从第一章至“结论与展望”的页数不得低于40页,通常至少50页以上)。
密级:
硕士学位论文
××××××××研究及实现
作者:
指导教师:×× 教授 中国科学院大学工程管理与信息技术学院
××高工所在单位名称
学位类别:工程硕士
学科专业:
研究所 :中国科学院大学工程管理与信息技术学院
年月
英文论文题目
By
[作者英文]
A Dissertation Submitted to
University of Chinese Academy of Sciences
一级节标题目录
2.5 有关图、表、表达式……9
In partial fulfillment of the requirement
For the degree of
Master of[学科门类或专业学位类别]
College of Engineering and Information Technology
University of Chinese Academy of Sciences
学位论文一般由十二个部分组成,依次为:1.中文封面;2.学位论文独创性声明及使用授权说明;3.中文摘要; 4.Abstract; 5.目录; 6. 插图和附表清单(必要时); 7.符号说明(必要时); 8.正文(第1章,第2章……); 9.参考文献; 10.附录(必要时);11.致; 12.个人简历、在学期间发表的论文及研究成果。除非标有“必要时”几个字,说明可有可无,其他容必须在学位论文中予以提供,是论文撰写的组成部分。