全国电子设计大赛旋转倒立摆
全国电子设计大赛题目简易旋转倒立摆及控制装置C题
2013 年全国大学生电子设计竞赛试题参赛注意事项(1)9 月4 日8:00 竞赛正式开始。
本科组参赛队只能在【本科组】题目中任选一题;高职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份的有效证件(如学生证)随时备查。
(4)每队严格限制3 人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须回避,对违纪参赛队取消评审资格。
(6)9 月7 日20:00 竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
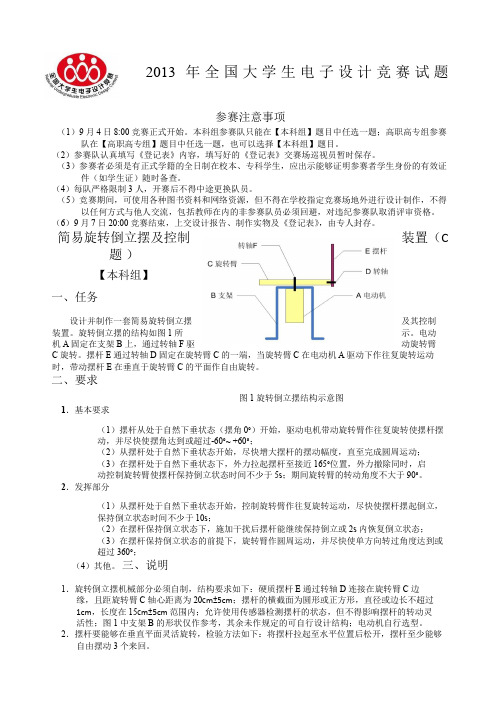
简易旋转倒立摆及控制装置(C 题)【本科组】一、任务设计并制作一套简易旋转倒立摆及其控制装置。
旋转倒立摆的结构如图1 所示。
电动机A 固定在支架B 上,通过转轴F 驱动旋转臂C 旋转。
摆杆E 通过转轴D 固定在旋转臂C 的一端,当旋转臂C 在电动机A 驱动下作往复旋转运动时,带动摆杆E 在垂直于旋转臂C 的平面作自由旋转。
二、要求图1 旋转倒立摆结构示意图1.基本要求(1)摆杆从处于自然下垂状态(摆角0°)开始,驱动电机带动旋转臂作往复旋转使摆杆摆动,并尽快使摆角达到或超过-60°~ +60°;(2)从摆杆处于自然下垂状态开始,尽快增大摆杆的摆动幅度,直至完成圆周运动;(3)在摆杆处于自然下垂状态下,外力拉起摆杆至接近165°位置,外力撤除同时,启动控制旋转臂使摆杆保持倒立状态时间不少于5s;期间旋转臂的转动角度不大于90°。
2.发挥部分(1)从摆杆处于自然下垂状态开始,控制旋转臂作往复旋转运动,尽快使摆杆摆起倒立,保持倒立状态时间不少于10s;(2)在摆杆保持倒立状态下,施加干扰后摆杆能继续保持倒立或2s 内恢复倒立状态;(3)在摆杆保持倒立状态的前提下,旋转臂作圆周运动,并尽快使单方向转过角度达到或超过360°;(4)其他。
2013年电子设计大赛旋转倒立摆资料
2013 年全国大学生电子设计竞赛简易旋转倒立摆及控制装置(C 题)[ 本科组2013年9月7日摘要:设计并制作了一个基于P ID 控制的倒立摆系统。
选用低功耗单片机AT89C51 、减速电机、电位器等器件,完成基本功能。
以单片机控制减速电机转速,改变摆杆转角θ,并保证让摆杆在同一平面内做圆周运动,最终使摆杆达到倒立(在规定的-165 °至165°范围内)稳定状态。
关键字: AT89C51 单片机;减速电机;电位器Abstract :Designed and produced an inverted pendulum system based on PID control. Choose low power single chip microcomputerAT89C51, gear motor, potentiometer, such as device, complete the basic functions. With single-chip microcomputer control deceleration motor speed, change the swinging rod Angle theta, and ensure that the swinging rod is circular motion in the same plane, eventually make the swinging rod upside down (in the rules - 165 to 165 ) s°teady state.Keywords: AT89C51 、 Gear motor 、 potentiometer目录序⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯.5 前言⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯............. ⋯⋯⋯⋯⋯⋯ 61系统方案 (7)1.1系统结构 (8)1.2方案的比较和选择 (10)1.2.1电机的论证与选择 (10)1.2.2 电机驱动的论证与选择⋯⋯⋯⋯..... ⋯⋯⋯11 1.2.3速度控制.. (12)2理论分析与计算 (13)2.1电动机选型 (13)2.2摆杆状态检测 (15)2.3驱动与控制算法 (19)3电路与程序设计 (23)3.1 ......................................................... 电路的设计 (23)3.1.1控制部分用51单片机 (23)3.1.2硬件部分 (24)3.1.3 软件部分 (24)3.1.4部分器件原理 (25)3.2 ......................................................... 程序结构与设计.. (26)4设计小结 (30)5参考资料 (32)倒立摆系统是理想的自动控制教学实验设备,使用它能全方位的满足自动控制教学的要求。
2013年全国电子设计大赛(c题)报告
2014年8月30日旋转倒立摆简易及控制装置(C题)【本科组】参赛队号:20130297简易旋转倒立摆及控制装置(C题)摘要倒立摆的控制是控制理论研究中的一个经典问题,是理想的自动控制教学实验设备,使用它能全方位满足自动控制教学要求,具有模块好和品种多样化等优点。
本组旋转倒立摆系统的稳定性较好,抗干扰能力较强。
机械部分包括旋转臂、摆杆、电动机、转轴、支架。
控制系统设计包括系统硬件电路及软件设计。
硬件部分采用角速度传感器与主控芯片相连,通过角度的测算实时向MCU发送摆杆的状态,MCU通过控制LM298进而控制电机的转向,进而控制摆杆的状态。
主控芯片采用STC12C5A60S2,通过LM298电机驱动与减速直流电机进行通信,并实时用LCD1602液晶显示参数。
软件部分根据最基本的PID算法,给出了程序设计流程图并用C语言编写了控制程序。
关键词:STC12C5A60S2 角速度传感器 LM298AbstractChuangyi Jane round the Chinese dragon light and archaic wall great the Great Wall of the song typeface do regular script variety of body control of inverted pendulum is a classical problem in the study of control theory, is an ideal automatic control teaching experiment equipment, the use of it can meet the requirements of automatic control teaching in all directions, has the advantages of good module and species diversity. This group of rotational inverted pendulum system is of good stability, strong anti-jamming capability. Mechanical parts including rotating arm, swinging rod, motor, shaft and support. Control system design including the system hardware circuit and software design. Hardware part adopts angular velocity sensor is connected to the main control chip, through the Angle of the measured real-time send MCU state of swinging rod, MCU by controlling LM298 and steering control motor, and control the state of the swinging rod. Master control chip USES STC12C5A60S2, through LM298 motor driver communicate with dc motor slowdown, and real-time use LCD1602 LCD display parameters. Software part according to the basic PID algorithm, and gives the flow chart of program design using C language to write the control program.Keywords:STC12C5A60S2 LM298 angular velocity transducer目录一、系统方案 (3)1、总体设计方案 (3)2、方案的比较 (3)2.1 电机的选择 (3)2.2 传感器的选择 (3)2.3 控制系统 (3)二、理论分析与计算 (4)1、理论分析 (4)1.1 角度传感器 (4)1.2 PWM脉冲宽度调制 (4)2、PID算法 (4)三、电路与程序设计 (4)1、电路 (5)1.1 系统总体框图 (5)1.2 最小系统框图 (5)1.3 电源 (5)2、程序流程图 (5)2.1 主程序流程图 (5)2.2 电机驱动子程序流程图 (5)2.3 角度传感器子程序流程图 (5)四、测试方案与测试结果 (6)1、测试方案 (6)1.1 硬件测试 (6)1.2硬件软件联调 (6)2、测试结果及其分析 (6)五、结论 (6)附录:附一:最小系统电路图 (7)附二:程序清单 (8)一、系统方案1、总体设计方案本系统主要由角速度传感器模块、单片机最小系统模块、电机模块、电源模块组成。
全国电子设计大赛旋转倒立摆
目录第一章系统方案比较与选择 ....................................................................................1.1总实现方案................................................................................................................1.2主控制器方案比较与选择........................................................................................第二章理论分析与计算 ............................................................................................2.1编码器脉冲转换角度设计........................................................................................2.2摇摆及圆周算法设计................................................................................................2.3机械结构设计及电机选型........................................................................................2.4 PID算法设计 ..........................................................................................................第三章系统电路设计..................................................................................................3.1 系统主板工作原理...................................................................................................第四章系统程序设计................................................................................................4.1 系统总体模块图.....................................................................................................4.2 系统总流程图...........................................................................................................第五章系统测试与结果..............................................................................................5.1 传感器角度测试.....................................................................................................5.2 摇摆及圆周运动测试...............................................................................................5.3 倒立摆测试...............................................................................................................第六章误差分析......................................................................................................6.1 整体的误差分析.....................................................................................................6.2 软件引起的算法误差分析.....................................................................................第七章参赛感悟......................................................................................................摘要本设计综合考虑基础部分和发挥部分要点,采用mega128a为主控芯片,BTS7960驱动电机并在程序中涉及到pid算法对电机进行调控,在设计中,我们采用1000线编码器为角度传感器。
全国大学生电子设计竞赛设计报告风力摆
2015年全国大学生电子设计竞赛风力摆控制系统(B题)2015年8月15日摘要本风力摆系统主要包括单片机控制模块,开关电源(电源模块)激光笔及小型轴流风机,以及基于六轴倾角仪mpu6050的闭环控制系统。
其中控制模块采用STM32为核心控制芯片,激光笔作为系统的执行机构,的小型轴流风机作为驱动风力摆的唯一动力,用12V的开关电源驱动轴流风机。
轴流风机和摆杆通过万向节固定在支架上(用粗股导线将风力摆悬挂在支架上)。
固定在支架上,测量得到的角度经过软件处理得到风力摆摆动所需要的PWM值。
(本系统的PID算法算法是通过实际经验试验出风力摆的控制规律,稳定的完成风力摆运动过程中激光笔画轨迹。
)关键词:风力摆; STM32; 轴流风机; PID算法; mpu6050目录六、1风力摆控制系统(B题)【本科组】一、系统结构方案与设计1、机械结构设计我们以生钢为材料加工成的十字作为风力摆支架的底盘,结构坚固克服摆动时的震动。
以实心的钢棒作为摆杆减小了摆动时的自旋,用万向节将摆杆和支架的水平臂连接保证了摆动的灵活性以及达到了摆动角度和速度的精确控制。
置于摆杆上的姿态采集模块mpu6050作为系统的闭环控制。
四个轴流风机连接成方形作为系统的动力。
这样我们就搭建了一个稳定可靠的机械系统,这使系统的各项参数处于比较稳定的状态,有利于后期控制系统的调节。
(本系统的PID算法算法是通过实际经验试验出风力摆的控制规律,稳定的完成风力摆运动过程中激光笔画轨迹。
)图1 风力摆结构示意图2、主控芯片的论证和选择方案一:选择ATs89C52单片机作为核心控制芯片,该单片机体积小操作简单,价格便宜。
因为89C52单片机内部没有集成的函数库,且控制芯片外设模块较多,实际软件编写时复杂麻烦。
方案二:选择stm32单片机进行系统的控制。
STM32系列芯片时钟频率高达168MHz 具有512K字节SRAM,具有极强的处理计算能力。
较为适合需要快速反应的倒立摆系统。
2013年全国电子设计大赛C题设计报告.doc
2013年全国大学生电子设计竞赛题目:简易旋转倒立摆及控制装置(C题)参赛学校:江苏师范大学队伍编号:XZ 015参赛队员:徐园明、刘海腾、黄波指导教师:朱士虎、王立巍2013年9月7日目录摘要 (1)Abstract (1)1方案论证与比较 (2)1.1电机类型的论证与选择 (2)1.2单片机的论证与选择 (2)1.3电机驱动电路的论证与选择 (2)1.4角度传感器的论证与选择 (3)2系统实现方框图和电路设计 (4)2.1系统总体框架图和实物构架图 (4)2.2硬件电路设计 (5)2.2.1电位器电路 (5)2.2.2显示模块的电路 (5)2.2.3电机驱动电路 (6)3系统软件设计 (7)3.1精密电位器误差计算 (7)3.2倒立摆控制策略 (7)3.3系统流程图 (9)4测试方案与测试结果 (10)4.1测试仪器 (10)4.2测试结果 (10)4.3测试结果分析 (11)参考文献 (12)摘要本文以STC12C5A60S2单片机为控制核心,通过角度传感器实时检测出倒立摆的位置并由单片机计算,计算PID控制算法,实现对直流电机转速的控制,达到倒立摆的动态平衡。
同时系统可以通过键盘设定运行模式和相关角度值,倒立摆运行角度和运行时间由液晶显示,具有较好人机界面。
系统设计结构简单,制作成本低,控制精度高。
关键字:STC12C5A60S2 倒立摆 PIDAbstractThis paper takes STC12C5A60S2 single chip as the control core,Through the real-time detection of the inverted pendulum's position and angle sensor is composed of a single chip computer calculation,Calculation of PID control algorithm,Control the speed of the DC motor,To achieve the dynamic balance of the inverted pendulum.At the same time the system can be set through the keyboard operation mode and related anglevalues.Inverted pendulum movement angle and running time by the liquid crystal display,With good man-machine interface.The system has the advantages of simple structure design,Low production cost,High control precision.Keyword: STC12C5A60S2 level inverted pendulum PID1 方案论证与比较1.1电机类型的论证与选择方案一:采用步进电机。
2013年全国大学生电子设计竞赛 C题
2013年全国大学生电子设计竞赛简易旋转倒立摆及控制装置(C 题)【本科组】2013年9月4日简易旋转倒立摆及控制装置摘要:本作品采用了TI公司MSP430 单片机作为控制器,实现了简易旋转倒立控制系统。
本作品选择两相四线步进电机作为旋转倒立摆的驱动装置,通过精密导电塑料角位移传感器获取摆杆的角度,实现对摆杆E运动状态的检测,以此角位移传感器的测量值作为反馈量,通过PID算法控制步进电机的运动方向和单位时间内运动的步数,实现对摆杆E角度的控制以及倒立摆的起摆和倒立平衡。
本作品可以实现对E摆杆运动状态的检测、倒立摆、起摆以及倒立摆的倒立平衡控制,具有起摆速度快、倒立摆平衡状态稳定、抗干扰能力强等特点。
关键字:旋转倒立摆步进电机 PID算法Abstract:This paper describes a control based on TI's MSP430 microcontroller simple rotary inverted control system. The system uses the West An Jiusheng 57HS56 08 type two-phase four-wire stepper motor as the power source of the system. In WDS35D4 precision conductive plastic angular displacement sensor as the only sensor to realize the system E pendulum motion detection, and so the sensor feedback value as the amount of feedback through software algorithm to determine E pendulum motion by changing the stepper motor the steering and speed to control the state of motion of the pendulum E. Test results had showed that: the system can realize the E pendulum motion detection and control. And the system also has a simple structure, enabling strong, control and stability advantages.Keywords:Rotating balance handstand tepper motor angular displacement一:系统方案1.1 系统结构:本系统主要由以下几部分构成,包括:MSP430单片机、液晶显示模块、矩阵键盘模块、角位移传感器、步进电机驱动模块以及步进电机。
全国电子设计大赛报告一等奖
2013 年 全 国 大 学 生 电 子 设计 竞 赛摘要 :通过对该测控系统结构和特点的分析, 结合现代控制技术设计理念实现了以微控制 器 MC9S12XS128系列单片机为核心的旋转倒立摆控制系统。
通过采集的角度值与平衡位 置进行比较,使用 PD 算法,从而达到控制电机的目的。
其工作过程为:角位移传感器 WDS35D 通过对摆杆摆动过程中的信号采集然后经过 A/D 采样后反馈给主控制器。
控制器 根据角度传感器反馈信号进行 PID 数据处理,从而对电机的转动做出调整,进行可靠的 闭环控制,使用按键调节 P 、D 的值,同时由显示模块显示当前的 P 、D 值。
关键字: 倒立摆、直流电机、 MC9S12XS12单8 片机 、角位移传感器 WDS35、D PD 算法 目录一、设计任务与要求 (3)1 设计任务 (3)2 设计要求 (3)二 系统方案 (4)1 系统结构 (4)2 方案比较与选择 (4)( 1) 角度传感器方案比较与选择 (4)( 2) 驱动器方案比较与选择 (5)三 理论分析与计算 (5)简易旋转倒立摆及控制装置( C 题)1 电机的选型 (5)2 摆杆状态检测 (5)3驱动与控制算法 (5)四电路与程序设计 (6)1 电路设计 (6)( 1)最小系统模块电路 (6)(2)5110显示模块电路设计 . (6)( 3)电机驱动模块电路设计 (6)(4)角位移传感器模块电路设计 (6)( 5)电源稳压模块设计 (7)2 程序结构与设计 (8)五系统测试与误差分析 (8)测试方案 (8)测试使用仪器 (8)测试结果与误差分析 (9)6 结论 (10)参考文献 (10)附录 1 程序清单(部分) (11)附录 2 主板电路图 (13)附录 3 主要元器件清单 (13)、设计任务与要求1 设计任务设计并制作一套简易旋转倒立摆及控制装置。
旋转倒立摆的结构如图1 所示。
电动机A固定在支架B上,通过转轴F 驱动旋转臂C旋转。
全国大学生电子设计大赛论文
2013年全国大学生电子设计竞赛简易旋转倒立摆及控制装置(C题)【1101003组】2013年9月7日简易旋转倒立摆及控制装置(C题)摘要本系统采用自制的简易旋转倒立摆及控制装置,以16 位单片机(STC89C51)作为旋转倒立摆的检测和控制核心,以额定电压12V的步进电机驱动,通过加速度传感器(ADXL345)转变的角度传感器测定摆杆角度变化来定位摆杆的位置。
系统采用角度传感器(ADXL345)探测在摆杆保持倒立状态的前提下,旋转臂作圆周运动前进;同时通过编码器及PID控制算法实现了步进电机的转速和转向进行调节,以准确找到平衡点位置。
控制器的设计是倒立摆系统的核心内容,主要用到典型的控制器设计理论有PID控制、根轨迹以及频率响应法、状态空间法、最优控制理论等。
本系统可在较短时间内完成摆杆从自然下垂状态,驱动电机带动旋转臂作往复旋转使摆杆摆动,寻找平衡点等任务。
关键词:角度传感器;旋转倒立摆;模糊控制;最优控制理论;目录1系统方案......................................................................................... 错误!未定义书签。
1.1电机方案的论证与选择 (1)1.2 控制系统方案的论证与选择 (2)1.3 角度测量方案的论证与选择 (2)2系统理论分析与计算 (2)2.1 角度检测模块的分析 (2)2.2 控制方法的理论 (3)2.3 设计思想理论分析 (4)2.4 理论计算 (4)3电路与程序设计 (6)3.1电路的设计 (6)3.1.1系统总体框图 (6)3.1.2 电机驱动模块设计 (7)3.1.3 角度传感器模块 (7)3.1.4电源模块 (7)3.2程序的设计 (7)3.2.1程序功能描述与设计思路 (7)3.2.2程序流程图 (8)4测试方案与测试结果 (8)4.1硬件测试 (8)4.2 测试条件与仪器 (9)4.3 测试结果 (9)4.3.1不同脉冲时间间隔对应速度测试 (9)4.3.2摆杆达到指定高度往复运动的时间测试 (10)4.3.3摆杆达到指定度数的测试 (10)4.3.4摆杆选择和配重平衡测试 (10)4.3.5摆杆完成圆周运动测试 (11)4.3.6基本功能(3)测试 (11)4.3.7测试分析与结论 (12)5结束语 (12)6参考文献 (12)附录1:电路原理图 (13)附录2:电机驱动原理图 (14)附录3:稳压模块原理图 (15)附录4:主程序 (16)附录5:角度传感器子程序 (18)简易旋转倒立摆及控制装置(C 题)【本科组】1系统方案本系统主要由系统模块、角度检测模块、电机驱动模块、电源模块组成。
2013电赛报告
2013年全国大学生电子设计竞赛设计报告题目名称:简易旋转倒立摆及控制装置【本科组C题】参赛队号:201302092013年9月7日2013年“瑞萨杯”全国大学生电子设计竞赛摘要:本系统以STC12C5A60S2单片机最小系统为核心,辅以角度传感器、姿态传感器、开关控制电路、LCD1602显示、电机驱动电路等组成。
该设计利用PWM 调制来控制旋转臂转速的变化,通过角度传感器和姿态传感器检测摆杆角度偏转信号,并将检测到的数值A/D转换后送入调速系统,经LCD1602显示屏进行显示。
也可通过拨码开关控制旋转臂的转速,从而改变摆杆的状态。
该系统实现了通过操作拨码开关控制旋转臂转速的大小,使摆杆状态按要求变化。
关键词:单片机最小系统角位移传感器 A/D转换2013年“瑞萨杯”全国大学生电子设计竞赛目录1.作品简介 (1)2.系统方案论证和比较 (1)2.1系统方案整体实验框图 (1)2.2方案论证与比较 (1)2.1.1输入模块选择 (1)2.1.2调制方式的选择 (2)2.1.3角度传感器的选择 (2)2.1.4显示系统的选择 (2)2.3理论分析与参数计算 (2)2.3.1控制电路 (2)2.3.2角度测量原理与控制算法 (3)3.电路与程序设计 (3)3.1硬件设计 (3)3.1.1角度传感器的设计 (3)3.2软件设计 (3)3.1.1软件主程序流程图 (3)3.1.2程序算法理论分析 (4)4.系统调试与结果分析 (5)4.1系统调试的方法与仪器 (5)4.2系统电路的调试 (5)4.2.1电机的性能测试 (5)4.2.2角度传感器的性能测试 (5)4.3注意事项及解决方案 (6)4.4调试结果分析与总结 (6)5.实验结果的分析与总结 (6)6.参考文献 (6)附录一:部分电路原理图 (1)附录二:程序源代码 (4)1.作品简介本次设计作品以单片机最小系统和角度传感器、姿态传感器为制作核心,同时运用A/D模数转换,PWM调制旋转臂转速、LED声光显示,拨码开关控制等,从摆杆方向上的角位移传感器接收到摆杆角度偏转的信号,经A/D模数转换后,LED显示器进行声光显示。
全国电子设计大赛旋转倒立摆
全国电子设计大赛旋转倒立摆电子设计是近年来快速发展的领域,让我们的生活变得更加智能化、便捷化。
而全国电子设计大赛旋转倒立摆项目则是其中一个颇具挑战性的项目。
本文将介绍一下旋转倒立摆的原理和设计思路。
旋转倒立摆是一种由倒立摆和旋转摆构成的多自由度控制系统。
倒立摆的控制是一个经典问题,早在两百多年前,法国科学家拉格朗日就提出了相应的控制方程,并且证明了它是一个具有混沌特性的系统。
而旋转倒立摆在此基础上,增加了旋转自由度,给控制带来了更大的难度。
旋转倒立摆的控制主要涉及到两个方面:倒立摆的平衡和旋转摆的稳定。
倒立摆的平衡通过控制杆的倾斜角度来实现,而旋转摆的稳定则需要通过控制摆杆的转动来实现。
两个摆的运动之间存在相互影响和耦合,对控制系统的设计提出了更高的要求。
旋转倒立摆的设计思路主要分为硬件设计和软件设计两个方面。
硬件设计主要包括传感器模块、执行器模块和控制器模块。
传感器模块用于获取摆的姿态信息,可以通过陀螺仪或者加速度计等传感器实现。
执行器模块用于对摆进行控制,可以通过直流电机或者舵机等执行器实现。
控制器模块则是整个系统的核心,用于采集传感器数据、计算控制命令,并将控制命令输出给执行器模块。
控制器模块可以采用单片机或者FPGA等芯片实现,也可以采用PC或者嵌入式系统来实现。
软件设计主要包括算法设计和控制策略设计两个方面。
算法设计主要涉及到控制器模块中的姿态估计算法和控制算法。
姿态估计算法用于根据传感器数据计算摆的姿态信息,一般采用卡尔曼滤波算法或者互补滤波算法等。
控制算法则根据摆的姿态信息计算出相应的控制命令,使摆保持平衡和稳定。
常用的控制算法包括PD控制算法、模糊控制算法和遗传算法等。
控制策略设计则是根据设计要求和实际情况确定控制算法的参数和控制策略,以达到最佳的控制效果。
在设计旋转倒立摆时,需要考虑到系统的稳定性和鲁棒性问题。
稳定性是指系统在受到干扰或者参数变化时,能够保持平衡和稳定的能力。
鲁棒性是指系统对于外界干扰和不确定性的抵抗能力,包括传感器误差、执行器非线性等。
倒立摆 K60设计报告
2013年全国大学生电子设计竞赛简易旋转倒立摆及控制装置(C题)摘要倒立摆控制系统是一个复杂的、不稳定的、非线性系统。
本设计在研究倒立摆运动规律的基础上,构建其运动轨迹的数学模型,使用MATLAB进行仿真分析,在对倒立摆模型认识以后,使用k60微控制器结合PID算法给出信号驱动直流减速电机,进而对倒立摆系统进行控制,在倒立的过程中使用编码器采集摆杆角度,对摆杆反馈的角度进行处理,针对角度,角速度的方向,电机运行方向进行处理,运用PD算法调节摆杆倒立,PI参数调节电机速度,通过双回路PD\PI控制方案实现了对旋转臂位置和摆杆偏角的同时闭环控制。
关键词:倒立摆; PID算法;双闭环控制;AbstractInverted pendulum control system is a complex, nonlinear, unstable system. This design on the basis of studying the law of motion of the inverted pendulum, build its trajectory mathematical model, using MATLAB simulation analysis, after understanding of inverted pendulum model, use k60 micro controller combined with PID algorithm gives the signal driven dc gear motor, and then to control the inverted pendulum system, used in the process of standing on your head swinging rod Angle encoder acquisition, processing, the Angle of swinging rod feedback on point of view, the direction of the angular velocity, the motor running direction, adjusting handstand pendulum rod by using PD algorithm, PI parameters to adjust motor speed, by double circuit PD/PI control scheme realizes the rotating arm swinging rod Angle and position closed loop control at the same time.Keywords:inverted pendulum;PID algorithm;double closed loop control;目录一、系统方案 (1)1.1 主控芯片的论证与选择 (1)1.2 摆杆的角度测量的论证与选择 (1)1.3 电机的论证与选择 (1)二、系统结构 (2)2.1机械结构 (2)2.2测控电路结构 (2)三、理论分析与计算 (3)3.1倒立摆的基本模型 (3)3.2模型分析与参数测量 (3)3.3基于状态反馈的倒立控制 (4)四、电路与程序设计 (5)4.1系统的硬件设计 (5)4.2系统软件设计 (7)五、测试方案与测试结果 (10)5.1基本要求(1) (10)5.2基本要求(2) (10)5.3基本要求(3) (10)5.4发挥要求(1) (10)5.5发挥要求(2) (11)5.6发挥要求(3) (11)六.其他的拓展部分 (12)七、参考文献 (12)附录 (13)一、系统方案本系统主要有五大部分组成,即控制部分、电机部分、传感器部分、电源部分和人机交互部分。
2013年全国大学生电子设计竞赛(C题)
2013年全国大学生电子设计竞赛简易旋转倒立摆及控制装置(C题)2013年9月7日摘要旋转倒立摆是一个非线性、强耦合、多变量和自然不稳定系统。
通过它能有效地反映控制过程中诸如镇定性、鲁棒性、随动性以及跟踪等多种关键问题,是检验各种控制理论的理想模型。
对倒立摆的研究不仅具有深远的理论意义,而且在航天科技和机器人学领域中也有现实指导性意义。
本作品是基于STC89C52单片机作为核心控制器,以L298N作为驱动电路芯片,利用直流电机PWM调速原理,控制旋转臂的转速,从而控制摆杆的频率和振幅,当二者共振时就实现了摆杆在某一固定角度往复运动,能够实现倒立摆的基本功能。
利用加速度传感器获取摆杆的状态,实现摆杆在固定角度摆动,最终实现在竖直方向倒立,即小范围内摆动而不倒下。
关键词:旋转倒立摆,STC89C52,PWM调速,共振目录1系统方案------------------------------------------------ 1 1.1 设计要求 ------------------------------------------1 1.1.1 任务----------------------------------------1 1.1.2 要求----------------------------------------2 1.1.3 说明----------------------------------------2 1.2 总体设计方案---------------------------------------3 1.2.1 设计思路-------------------------------------3 1.2.2 方案论证与比较-------------------------------5 2单元硬件电路设计-----------------------------------------6 2.1 单片机控制系统设计---------------------------------7 2.1.1 STC89C52最小系统-----------------------------6 2.1.2 AD采集模块电路设计---------------------------6 2.1.3 显示模块电路设计-----------------------------7 2.2 加速度传感器的应用---------------------------------7 2.2.1 MMA7361L原理及应用---------------------------7 2.3 电机驱动模块---------------------------------------7 2.3.1 L298N驱动电路设计----------------------------8 3程序结构与设计-------------------------------------------8 3.1 程序流程图-----------------------------------------9 3.1.1 主程序流程图及算法分析-----------------------9 3.1.2 显示程序设计--------------------------------10 4系统测试------------------------------------------------11 4.1 实验摆角测试-------------------------------------114.2 实验结果分析-----------------------------------11 5参考文献----------------------------------------------12 附录1 总程序附录2 电路原理图简易旋转倒立摆及控制装置(C题)【XX组】1系统方案本系统主要由电机驱动模块、显示模块、加速度传感器模块,下面详细介绍各模块的选择与特点。
2013瑞萨杯电子设计大赛倒立摆论文资料
2013全国电子设计大赛瑞萨杯2013年瑞萨杯全国大学生电子设计竞赛设计报告简易旋转倒立摆及控制装置设计报告书(C题)【本科组】2013年9月7日摘要本旋转倒立摆以MC9S12XS128单片机最小系统为控制核心,由BTN7970电机实现驱动,采用WDD35D电位式角度传感器进行检测。
系统由单片机发出指令,控制减速电机的转动,以带动旋转臂运动,从而控制摆杆的运动状态,摆杆的状态信息用电位式角度传感器检测并传送给单片机。
本系统含液晶显示模块,构造简洁,能实现赛题要求的功能。
关键词:旋转倒立摆角度传感器减速电机电机控制芯片Abstract :The design uses MC9S12XS128 SCM system as a core, conbined with WDD35D potentiometer angle sensor and BTN7970 motor control chip to achieve an integrated rotary inverted pendulum control system, which can control the motion state of the pendulum by operating the gear motor. The system is a simple rotary inverted pendulum control device that constitutes by power supply, sensor, motor drive, liquid crystal display, and other modules, characterized by its concise structure and functional diversification.Keywords:Rotary inverted pendulum, Angle sensor, Gear motor, Motor control chip目录1设计任务与要求 (2)1.1设计任务 (2)1.2设计要求 (2)1.2.1基本要求 (2)1.2.2发挥部分 (3)1.3题目分析 (3)2系统方案的论证与选择 (3)2.1 单片机最小系统的论证与选择 (3)2.2 电机模块的论证与选择 (4)2.2.1电机方案比较 (4)2.2.2电机驱动芯片方案比较 (5)2.2.3最终方案选择 (5)2.3 角度感器的论证与选择 (6)3系统理论分析与计算 (7)3.1 系统机械结构 (7)3.2 电机选型分析 (7)3.3摆杆状态的检测和计算 (8)3.3 驱动与控制的算法 (8)4系统硬件设计 (8)4.1驱动模块电路设计 (8)4.2电路原理图(见附录1) (9)5系统软件设计 (9)5.1系统框架图 (9)5.2系统总流程图 (10)5.3程序清单(见附录2) (10)6测试方案与测试结果 (10)6.1测试方案 (10)6.2 测试条件与仪器 (11)6.3 测试结果及分析 (11)6.3.1测试数据 (11)6.3.2测试分析与结论 (11)7.结论和总结 (12)7.1对设计的小结 (12)7.2设计收获体会 (12)7.3对设计进一步完善的建议 (12)附录1:电路原理图 (13)附录2:源程序 (14)1设计任务与要求1.1设计任务设计并制作一套简易旋转倒立摆及其控制装置。
旋转倒立摆论文
2013年全国大学生电子设计竞赛简易旋转倒立摆及控制装置(C题)【本科组】2013年9月7日摘要本设计采用了8位低功耗ATmega16为控制核心,采用高精度电位器通过单片机AD采样实时采集摆杆旋转角度及角度变化率,利用直流减速电机实现对摆杆的控制。
根据旋转倒立摆的数学模型分析,采用增量式积分分离PID控制算法来优化各个控制参数。
经过反复测试后,证明系统基本完全实现了题目的所有要求。
此外系统还增加了按键选择开关来进行模式的选择和参数的调整。
关键词:ATmega16 高精度电位器PID算法直流减速电机AbstractThis design uses the right low-power ARmega16 as the control core, usin g high precision potentiometer by MCU AD sampling real-time acquisition swi nging rod rotation Angle rate and Angle, of swinging rod by using DC gear motor control. Based on the analysis of the mathematical model of rotational i nverted pendulum, using the incremental integral separated PID to optimize the control parameters. After repeated testing, basic fully prove the system has re alized the subject all the requirements. System also increases the button switch for model selection and parameter adjustment.Keywords:ATmega16, high precision potentiometer, PID control algorithms ,DC gear motor目录一、系统方案 (1)1.1方案选择与论证 (1)1.1.1角度测量模块的论证与选择 (1)1.1.2单片机控制模块的论证与选择 (2)1.1.3电机模块的论证与选择 (2)1.1.4电源模块的论证与选择 (3)二、系统理论分析与计算 (3)2.1 旋转倒立摆分析 (3)2.1.1旋转倒立摆相关参数的计算 (4)2.1.2增量式积分分离PID控制算法 (5)2.2旋转摆系统的控制目标 (6)2.3旋转倒立摆控制的实现 (7)三、电路与程序设计 (7)3.1电路的设计 (7)3.1.1系统总体框图 (7)3.1.2电机驱动电路原理图 (9)3.1.3电源电路原理图 (9)3.2程序的设计 (10)3.2.1程序功能描述与设计思路 (10)3.2.2程序流程图 (10)四、测试方案与测试结果分析 (12)4.1测试方案 (12)4.2 测试条件与仪器 (12)4.3 测试结果及分析 (12)4.3.1测试结果 (12)4.3.2测试结果分析 (14)五、参考文献 (15)附录1:电路原理图 (16)简易旋转倒立摆及控制装置(C题)【本科组】一、系统方案根据题目要求,系统要求要实现对摆杆角度的控制,并要保证运动控制的实时性和平稳性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
全国电子设计大赛旋转倒
立摆
Prepared on 22 November 2020
目录
摘要
本设计综合考虑基础部分和发挥部分要点,采用mega128a为主控芯片,BTS7960驱动电机并在程序中涉及到pid算法对电机进行调控,在设计中,我们采用1000线编码器为角度传感器。
在该简单控制装置中,我们实现了摆动,圆周运动和短时间的自动控制下的倒立。
关键字:倒立摆,mega128a,编码器
第一章系统方案比较与选择
总实现方案
方案一:用陀螺仪和加速度计通过卡尔曼数据融合得到角度,用此处的角度为载体用单片机进行数据处理,并调整电机。
方案二:用电位器做角度传感,通过单片机自带ADC来读取电位数值以此为依据来判断角度,并调整电机。
方案三:用编码器做角度传感器,通过读取编码器的输出脉冲来计算角度传感器的输出角度,用此角度做处理调整电机。
通过对两个方案的对比选择,方案一中的加速度计和陀螺仪算法实现复杂,我们在融入卡尔曼滤波后有明显滤波效果,但是由于圆周运动,会使得各个方向轴返回的数据出错,且波动大,会减弱卡尔曼的滤波效果,对于pid的精准调整还是远远达不到预期。
在方案二中,考虑到电位器内部结构问题,虽然理论上电位器在转动过程中是线性的,但是考虑到每次停靠的电阻位可能会产生误差,最后考虑到我们最终选定的单片机ADC只有10位,在方案三中,由于实现编码器的功能实现方便简单,并能更多的趋近于精确值,因此最后我们采用了方案三。
主控制器方案比较与选择
为了完成在短时间快速采集并计算角度,主控器件必须有较高的CPU工作频率和存储空间。
方案一:采用51系列加强型STC12C5A60S2作为主控器件,用来实现题目所要求的各种功能。
此方案最大的特点是系统规模可以做得很小,成本较低。
操作控制简单。
但是,我们在利用单片机处理高速信号快速扫描及电机控制时显得吃力, 51系列单片机很难实现这一要求。
方案二:采用ATMEL公司的AVR系列ATMEGA128A单片机为核心控制器件,MEGA128A有8个外部中断,中断系统丰富,并且有128K 字节的系统内可编程Flash,我们对它的性能和指标相对也较为熟悉,如此能够实现快速扫描和数据处理!
按照题目的要求,综合考虑我们最终选择了方案二,采用ATMEGA128A单片机为核心控制器件。
第二章理论分析与计算
编码器脉冲转换角度设计
在单片机中,我们开启外部0中断,在AVR系列单片机中外部0中断的中断优先级最高,以此我们可以得到较为精确的角度。
由于我们使用的编码器为1000线编码器,所以每一个脉冲的角度值为,所以在计算时即使丢步也不会很大的影响角度值,我们在后面做过的实验测试中,也证明了我们的想法。
摇摆及圆周算法设计
我们通过对整体的系统建模,在查阅资料当中,根据单摆定律,摆杆的摆动虽然在衰减但是摆动的周期相同,所以在基础要求中的摇摆和圆周运动中,只要在摆杆在正弦我们对单摆系统实测波形如下,所以依据我们分析,当每次施
力点在每次过峰值的时候既可以累加力的作用效果,以此来完成摇摆和圆周运动。
图2-2
机械结构设计及电机选型
图2-3
以上是我们机械结构的仿真图。
在电机选型中,我们首先想到步进电机很便于角度控制,但是由于步进电机反应较慢,所以我们没有考虑,对于普通的直流电机虽然其反应快但调速性能差,另外我们还可以选择减速电机和直流伺服电机,直流伺服电机调速性,启动和制动都很有优势但是价格昂贵,最后在考虑到经济适用性方面,我们选择了带有减速箱的减速电机。
在这个简易摆装置中,我们选用400转减速电机,型号为JH37-555,额定功率为15W,力矩为,由于转矩T=9550 * P / n= ·m,电机中心距离转臂245mm,电机转矩已经足够大,完全可以带动所要带的物体。
另外,由于该系统中电机要在短时间内顺逆时针转动,所以系统要达到很高要求的稳定性,所以我们在选择装置的底盘和支架选用了较为稳固的粗木。
在转臂与摆杆连接处我们选用了欧姆龙1000线编码器,编码器的轴与轴承相连接,也解决了摆杆与转臂的连接问题。
在机械结构的设计当中我们一共修正了3次基本构架,也经历了很多次的调整,在这个过程中也确定了最终的最稳定的构架。
PID算法设计
为了实现主轴旋转角度控制,我们又采用电机转动范围限制,同样的采用增量式PID控制算法,且结合我们单片机的速度限制(8位,16Mhz),电机旋转角度测量
会存一定的的偏差,因此我们整定了P、I两个参数,减小了因测量误差计算出来的PID偏差。
采集回来的摆轴角度和主轴旋转角度,经PID反馈回来的数据进行融合,以PWM 占空比的形式直接输入到减速直流电机上面。
从而达到目标控制。
PID参数整定:由于我们在物理结构,以及力学方面的知识薄弱,因此我们采用了反复整定确定系数的办法,首先,我们控制I、D为零,控制P参数,知道系统对输入阶跃响应出现零界振荡,记下这时的比例系数和零界震荡周期,在此基础上将该系数乘以60~70%,在调节I参数,同样的方法,调节D参数,知道系统稳定。
增量型控制:
控制流程:
公式:
程序框图:
第三章系统电路设计
系统主板工作原理
系统主板主要由5V电源模块,电源模块,蜂鸣器模块,以及ATMEGA128A单片机为核心控制模块按。
5V电源模块:此设计采用12V开关电源供电,通过稳压芯片LM2576一脚输入三脚输出将12V输入转变为5V输出,来给单片机供电。
电源模块:电源输出是由AM1117稳压芯片三脚输入5V二脚输出来进行转换
按键模块:本系统板中设计了四个按键,通过按键来对不同功能来进行切换演示。
(外接)
液晶模块:液晶模块采用NOKIA5110液晶来显示,NOKIA5110液晶具有功能强大,连接简单等优势。
(外接)
图3-1 系统主板工作原理图
第四章系统程序设计
系统总体模块图
系统总流程图
第五章系统测试与结果
传感器角度测试
我们在进行测试时为了保证角度的正确性,我们每将摆杆转动一个圆周或者多个圆周最后在摆杆垂直的角度为对360度求余即为0度,所以我们对编码器测量角度进行了测量以便分析其误差。
摇摆及圆周运动测试
我们在调试好后,对摆杆的摇摆进行测试,主要是针对摆杆起振到60度及以上角度的时间进行了统计分析。
(该数据由秒表测量得到,角度由简易量角器测得)
由以上数据可知,摇摆测试中该装置基本稳定。
我们同时也对摆杆进行了圆周运动的测试,主要是针对圆周运动的稳定性进行了测试统计分析。
(该数据由秒表测量得到)
由以上数据可以,我们装置的圆周运动也是基本稳定的,但是在测试中出现了一次未成功进入的圆周运动状态,我们分析是,由于在程序中我们要求每次起振要从0度开始,由于测量中的疏忽,我们没有等到摆杆静止就进入了测试,由此而产生的错误。
倒立摆测试
我们对倒立摆主要进行了摆杆稳定时间测试,以此分析我们的装置在倒立摆过程中的稳定性。
第一项测试是在人为将摆杆树直在165度到-165度范围内,待摆杆直立后的稳定时间。
我们对倒立摆又进行碰撞测试(用15cm摆线绑定,将摆线拉至45度)
从以上数据可以看出,我们的倒立摆系统也是相对稳定的。
第六章误差分析
整体的误差分析
由于我们在本次设计中采用编码器为1000线编码器,理论上每转一圈要进入外部中断1000次,所以在程序中很有可能出现掉步或者错步的。
但是由于我们采用的编码器线数较高,所以即使丢步也能基本满足要求。
为了减小误差,我们将编码器接到了最高优先级别的外部中断0中,所以也基本能满足要求。
软件引起的算法误差分析
由于增量式PID输出的是控制量增量,如果采集系统出现故障,误动作影响较小,而本身有记忆功能,可仍保持原位,不会严重影响系统的工作,而位置式的输出直接对应对象的输出,因此对系统影响较大,因此我们的角度PID采用了增量式PID算法。
结合响应速度,我们整定了P、D两个参数,使系统响应更快,能在短时间内实现直立控制。
第七章参赛感悟
在本次电赛的四天三夜了,也是我们队全体人员感觉最为充实的一段日子,虽然结果不尽人意但是努力的过程还是值得我们回味的。
我们选定倒立摆题目以后,我们一共更换了三次机械结构,才最终敲定了最稳定的版本,在程序上,对于pid算法的调试,我们也积累了一些经验。
上图
为我队一次结构示
上图为我队第二次结构
上图为我队最后一次结构图。