主动四轮转向系统对高速汽车侧风稳定性的控制研究
汽车四轮转向研究现状
汽车四轮转向研究现状汽车四轮转向技术是一种改良传统两轮转向系统的创新技术,它可以通过控制车辆的四个轮子,实现更灵活、更稳定的转向效果。
汽车四轮转向技术的发展有助于改善汽车的操控性能、提高行驶稳定性、减小转弯半径,以及增加安全性和舒适性等方面的表现。
本文将探讨汽车四轮转向技术在行业中的现状和未来发展趋势。
目前,汽车四轮转向技术已经在市场上推出,并且得到了一些汽车制造商的应用和推广。
一些高端品牌如奥迪、宝马、奔驰等早已采用了四轮转向技术,并实现了良好的效果。
而在中低端车型中,一些汽车厂商也开始关注和引入四轮转向技术,以提升整车的竞争力。
因此,可以说汽车四轮转向技术已经逐渐成为汽车设计和制造的热点领域之一现阶段,市场上主要有两种类型的汽车四轮转向技术,分别是被动式四轮转向和主动式四轮转向。
被动式四轮转向是指根据车辆的转向角度,通过机械连接装置控制后轮转向,以达到提升车辆操控性能的目的。
而主动式四轮转向则是通过电子和电动装置控制后轮转向,以实现更加灵活和优化的操控效果。
在被动式四轮转向技术中,通过机械装置将前轮的转动角度传递给后轮,并通过悬挂系统和补偿机构来实现后轮的转向。
这种技术比较简单,成本较低,但是在操控性能和适应性上存在一定的限制。
一些车辆采用这种被动式四轮转向技术,可以在低速行驶时,提升车辆的操控性能和驾驶的舒适性。
主动式四轮转向技术则更加复杂和先进。
通过电子控制系统,可以检测车辆的速度、转向角度等参数,并根据这些参数控制后轮的转向角度,以实现更加灵活和优化的操控效果。
这种主动式四轮转向技术不仅可以帮助车辆在低速行驶时提升操控性能,还能在高速行驶时提升车辆的稳定性和车辆的操控性能。
目前,主动式四轮转向技术在高端豪华车型中已经得到了广泛应用。
一些汽车制造商已经推出了具备主动式四轮转向技术的车型,并获得了良好的用户反馈。
这种技术在一些高速行驶和紧急变道等情况下可以发挥重要作用,提高了车辆的稳定性和操控性能。
高速汽车侧风稳定性的虚拟试验研究
作者简介:冯清秀 (1953 - ),女,湖北仙桃人,华中科技大学
机械学院副教授,研究方向为机械电子工程。
《 机械与电子》2004(12)
没引起研究者的重视。最早提出汽车侧风稳定性问 题,是针对具有较高车速的赛车。该方面研究成果 的取得大多是在 20 世纪 50 年代以后。德国的 Kamm 教授首次进行了汽车稳定性和直线行驶能力的 研究[l]。他在其研究中指出,流线形好的汽车( 低 阻汽车),侧风稳定性相对较差。ScibOI RyISki 和 MiIiken 于 l975 年前后对汽车的空气动力特性做了 大量的理论分析[2 - 3]。UffeImann 研究了空气 动 力 学因素和悬架系统对汽车侧风特性的影响[4],并考 虑了驾驶员的反应,提出了在侧风条件下可以由风 敏因子 WS 作为评价指标来综合评价汽车的操纵 性。HuchO 和 EmmeIman 对汽车的稳态特性进行了 仿 真,以 探 讨 汽 车 特 征 参 数 对 侧 风 稳 定 性 的 影 响[3]。国内 对 汽 车 侧 风 稳 定 性 的 研 究 起 步 较 晚, l994 年郭孔辉院士对高速汽车侧风响应进行了分 析,并研究了结构参数对侧风稳定性的影响[5]。
virtuai test
文献标识码:A
文章编号:1001 2257(2004)12 0060 04 Abstract:Through the study on crosswind stabiiity
0 引言
test,this paper aims to search for an effective method
援引 ADAMS / CAR 模块提供的悬架、轮胎、车 身和转向机构等子系统进行组装,并参考国外某汽 车公司提供的整备质量为 l 800 kg,发动机后置轿 车的实际和试验数据,修改其几何定位参数,设定质 量、惯性矩等非几何信息,最终形成仿真需要的动力 学模型。
四轮转向汽车的动特性及其鲁棒控制研究的开题报告

四轮转向汽车的动特性及其鲁棒控制研究的开题报告一、研究背景和意义随着汽车工业的不断发展,四轮转向技术已逐渐成为汽车控制技术领域的研究热点。
四轮转向技术是一种能够增加汽车操控性和行驶稳定性的新技术,广泛应用于高端汽车中,如豪华轿车、跑车等。
四轮转向技术能够改善汽车的动态特性,提高车辆的灵活性、操控性和稳定性,因而对于提升汽车性能、提高驾驶舒适性和增加行驶安全具有重要意义。
在四轮转向汽车的动特性方面,目前的研究主要集中在仿真和实验两个方面。
在实验方面,通过搭建四轮转向汽车并进行实际测试,获取汽车运动学参数和控制系统数据,从而研究四轮转向汽车的行驶特性及其控制问题。
在仿真方面,应用虚拟仿真技术模拟不同环境下的车辆行驶情况,并进行控制算法的仿真验证,以提高四轮转向汽车控制算法的鲁棒性和性能。
基于此,本文将主要从四轮转向汽车的动特性及其鲁棒控制两个方面进行研究。
二、研究内容和方法(一)四轮转向汽车的动特性研究1、四轮转向汽车运动学模型的建立2、四轮转向汽车的行驶稳定性分析3、四轮转向汽车的操控性能评价(二)四轮转向汽车的鲁棒控制研究1、四轮转向汽车的控制系统设计2、四轮转向汽车控制策略的设计3、四轮转向汽车控制算法的仿真和实验验证研究方法主要包括理论分析和仿真验证。
通过搭建四轮转向汽车并进行测试实验,获取实际数据以验证理论分析的正确性。
运用MATLAB/Simulink等仿真软件,完成四轮转向汽车动力学仿真分析,优化控制策略,提高控制性能。
三、研究预期成果本文预期实现以下研究成果:1、建立四轮转向汽车的动力学模型,分析四轮转向汽车的动特性。
2、分析四轮转向汽车的行驶稳定性和操控性能,并进行评价。
3、设计四轮转向汽车的控制系统,并优化控制策略,提高车辆控制性能。
4、通过仿真和实验验证四轮转向汽车控制算法的鲁棒性和性能。
四、研究进度安排本文研究预计工作时间为一年。
研究进度安排如下:第1-2个月:文献综述,熟悉四轮转向汽车的相关技术和研究成果。
高速汽车侧风稳定性研究
s d o tn so u o t e c o swi d sa i t ic u i g if e c f u o t e p r mee s a tmo t y c n e t f tmo i r s - n tb l y, l d n n u n eo t mo i a a tr , uo - u a v i n l a v t e syi g a d d f r n r s - n s t d fco swi d s bl y e a u t n n r l o R S - i d i tl n i ee tco swid ,su y o r s — n t i t v l ai ,a d t as fC O Sw n v n f a i o i
sa iiy a e d s u s d Fi al tb lt ic s e . n ly,t e de eo me t te f su y o g — p e u o tv r s — n r h v l p n rnd o t d n hih s e d a tmoie c o swi d sa ii se p ce tb l y i x e td. t
T e sa u u n a k r p o t d n h g s e d a t moi e c o s wi d sa ii s i to uc d,T e h t t sq o a d b c d o fsu y i ih—p e u o t r s— n tb lt i nr d e v y h
驶的 汽车 , 时都 可能 受 到侧 风作 用 , 了在空 旷 随 除 的高 速公路上 受到 的任 意 方 向任 意强 度 的 自然 侧
风外 , 量 的交 通 路 线 、 大 随处 可 见 的 隧道 、 梁 和 桥
四轮独立转向汽车高速时操纵稳定性的研究
Ld t J
=
() 8
国2
= + 聃 + ,
a 是 小 的 ,
结果 :
,
() 9
假设 =常数 , 、6、 ,
设s 为拉普拉斯变换 之变量 , 可得如下
 ̄
角度 , 轮胎侧偏角 和 可用下式表示 :
-
町 Ⅱ一=+ 一 ( p竽 I U )
维普资讯
此时 , 前轮转 向角 和后轮 转向角 可 写
为:
:
的控制策略:前轮转过一定角度后 ,后外轮 按照比例系数 蜀 转动一定角度 ,内倒车轮 保持在中性位置上 ,车辆行驶方 向改变后, 再使内侧车轮进行同相位的转向。同时,让 原外侧轮 回到中性位置上 ,为下一次转 向做 准备 。 采用此 种控 制策 略 ,可得到迅 速 、连续
一
一
G: 矧 l IБайду номын сангаас
=p+ 一
U
() 2
=
b: m a t
一
“ o
詈
侧 向加速 度为
=
行列 式 内各元 素分别 为 : 2 +砖) (
— —
赢 一 ,
器 =磐 + +
( 4 )
一
横摆角加速度为
% :
兰
』
因此 ,作平 面运动 的汽车 运 动微分方 程 式为 :
2 总结
与4 WS汽车 相 比,4 S汽 车 尚在 理 论 WI
为使稳态侧偏角始终保持为零 , 通过设 上式的分子等于零 , 可求得比例系数为
研究范围内,并没有实现产品化。由于汽车 的回转特性主要由外侧轮决定 ,从理论上分 析可知 ,仅控制外侧车轮 也能取得 和 4 WS 相似的响应。4 S WI 汽车最大 的优点是 :对 于液压执行元件的要求大大降低 ,在整个转 向过程 中,减少 了能量消耗 ;采用内侧轮中 性位 置控制 法 ,使得 4 I 车可得 到快 W S汽 速 、连续 的 响应 。这 些 优 点 都 是 4 WS汽 车
四轮转向车辆操纵稳定性分析
四轮转向车辆操纵稳定性分析首先介绍四轮转向的概念、基本原理及系统结构和应用;,以两自由度操纵模型为例,对四轮转向(4WS)车辆的转向特性及操纵稳定性进行分析,并与传统的前轮转向(FWS)车辆进行比较;最后,给出了一个关于车辆质心侧偏角和横摆角速度的线性两自由度分析模型。
标签:四轮转向;前轮转向;操纵稳定性;横摆角速度0 引言从上世纪八十年代开始,后轮转向控制律的研究逐步兴起,对四轮转向车辆来说,当车速较低时,为了减小转向半径,通常使后轮转向方向與前轮相反;当高速行驶时,为了提高车辆的稳定性,后轮将产生与前轮同向的转向角。
四轮转向的基本原理是:利用车辆行驶中的某些信息来控制后轮的转角输入,以提高车辆的操纵稳定性。
本质上讲,四轮转向的优点主要是系统对后轮轮胎侧向力独立控制的能力。
由于四轮转向车辆可同时改变前后轮的侧偏角和轮胎侧向力,因而可提高车辆的瞬态响应,并改善车辆的转向控制能力。
下面采用两自由度单轨模型,在线性域内对4WS系统进行动力学分析。
1 四轮转向车辆的动力学模型四轮转向车辆的操纵动力学原理见图1。
通常、、、较小,因此有COS=,COS=,tan=,tan=。
在此假设汽车质心出沿前进方向速度u与车辆侧向速度v相比很大,可看做常量,轮胎切向力及迎风阻力不计,则根据受力关系,可建立如下方程:采用前后轮转向比c为定值的控制方式,即将控制目标设为使车辆转向时其质心侧偏角,可导出稳态条件下车辆质心侧偏角时前后轮转向比c应满足的条件。
按照几何定义:,因而令,同时消去存在的项,就得到稳态条件下车辆质心侧偏角时c应满足的条件:上式说明,车辆在高速工况行驶时后轮应与前轮同方向转向;而低速时后轮应与前轮反方向转向。
2 前轮角阶跃输入下的稳态响应分析汽车等速行驶时,前轮角阶跃输入下的稳态响应可用稳态横摆角速度增益来评价。
令方程(12)中的动态项和为0,使输入项即前轮转角为定值,即可解出输出项,即稳态响应,这时车作等速圆周行驶。
四轮转向车辆的操纵稳定性分析
[12] H a r k e g a r dO.E f f i c i e n tA c t i v eS e tA l go r i t h m s f o r S o l v i n g C o n s t r a i n e d L e a s t S qu a r e s P r o b l e m si n A i r c r a f t C o n t r o l A l l o c a t i o n [C ]//P r o c e e d i n gs o f t h e41s tI E E E C o n f e r e n c eo n D e c i s i o na n d C o n -t r o l .L a sV e g a s ,2002:1295‐1300.[13] 戴一凡.分布式电驱动车辆纵横向运动综合控制[D ].北京:清华大学,2013.[14] V i e h w e i d e r A ,H o r iY.E l e c t r i c V e h i c l e L a t e r a lD y n a m i c sC o n t r o lB a s e do nI n s t a n t a n e o u sC o r n e -r i n g S t i f f n e s sE s t i m a t i o na n da n E f f i c i e n tA l l o c a -t i o n S c h e m e [C ]//C o n f e r e n c e o n M a t h e m a t i c a lM o d e l l i n g.V i e n n a ,2012:1213‐1218.[15] F a r a z a n d e hA ,A h m e dA ,R a k h e jaS .P e r f o r m a n c e A n a l y s i s o f A c t i v e I n d e p e n d e n t F r o n t S t e e r i n g (A I F S )f o r C o mm e r c i a l V e h i c l e sw i t hG r e a t e r L a t -e r a l L o a dS h if tP r o p e n s i t y [J ].S A EP a pe r ,2013‐01‐2355.(编辑 袁兴玲)作者简介:袁希文,男,1985年生㊂湖南大学机械与运载工程学院博士研究生㊂主要研究方向为车辆系统动力学及控制㊂文桂林,男,1970年生㊂湖南大学机械与运载工程学院教授㊁博士研究生导师㊂周 兵,男,1972年生㊂湖南大学机械与运载工程学院副教授㊁博士研究生导师㊂四轮转向车辆的操纵稳定性分析刘 刚1 陈思忠2 郑凯锋3 王文竹11.沈阳航空航天大学,沈阳,1101362.北京理工大学,北京,1000813.中国北方车辆研究所,北京,100072摘要:针对四轮转向(4W S)车辆的操纵稳定性问题,以线性二自由度车辆模型为基础,从时域和频域两个角度分析了如何通过控制后轮转角相位与角度来提高4W S 车辆的低速机动性和高速稳定性㊂用0.4g 的侧向加速度来界定四轮转向系统的有效工作区域,推导出后轮转角的合理范围㊂对比分析了两种典型控制算法的稳态特性和瞬态特性,稳态特性不依控制算法的改变而改变,控制算法二则明显提高了4W S 车辆的瞬态响应品质㊂研究结果为4W S 系统的开发提供了理论依据㊂关键词:四轮转向(4W S);操纵稳定性;稳态;瞬态中图分类号:U 463.4 D O I :10.3969/j.i s s n .1004132X.2015.09.022A n a l y s i s o fV e h i c l eH a n d l i n g a n dS t a b i l i t y o f F o u rW h e e l S t e e r i n g L i uG a n g 1 C h e nS i z h o n g 2 Z h e n g K a i f e n g 3 W a n g We n z h u 11.S h e n y a n g A e r o s p a c eU n i v e r s i t y ,S h e n y a n g ,1101362.B e i j i n g I n s t i t u t e o fT e c h n o l o g y ,B e i j i n g,1000813.C h i n e s eN o r t hV e h i c l eR e s e a r c h I n s t i t u t e ,B e i j i n g,100072A b s t r a c t :B a s e do n t h e 2D O F l i n e a r b i c y c l em o d e l ,t h e h a n d l i n g a n d s t a b i l i t y of 4W Sv e h i c l ew a s s t u d i e dh e r e i n .T h e r e a rw h e e l c o n t r o l a lg o r i th m w a sdi s c u s s e d i n t i m ed o m a i na n d f r e q u e n c y d o m a i n i no r d e r t o i m p r o v e t h em a n e u v e r a b i l i t y a t l o ws p e e da n d s t a b i l i t y a t h i g hs p e e d .B y u s i n g th e l a t e r a l a c c e l e r a t i o n a s 0.4g to d e f i n e t h e e f f e c t i v ew o r k i n g a r e a f o r 4W S ,t h e r a n g e f o r r e a r s t e e r i n g a n g l ew a s d e r i v e d .T h e s t e a d y ‐s t a t e a n d t r a n s i e n t ‐s t a t e o f t w o t y p i c a l c o n t r o l a l g o r i t h m sw e r e c o m p a r e d a n d a n -a l y z e d .T h e c o n t r o l a l g o r i t h m d o e sn o t a f f e c t t h es t e a d y‐s t a t ec h a r a c t e r i s t i c so f t h ev e h i c l e ,b u t c a n i m p r o v e t h e t r a n s i e n t r e s p o n s e .T h i s p r o v i d e s t h e t h e o r e t i c a l b a s i s f o r t h ed e v e l o p m e n to f t h e4W S s ys t e m.K e y wo r d s :f o u rw h e e l s t e e r i n g (4W S );h a n d l i n g a n d s t a b i l i t y ;s t e a d y ‐s t a t e ;t r a n s i e n t ‐s t a t e 0 引言以改善低速操纵灵活性和(或)高速行驶稳定性为主的四轮转向(f o u rw h e e l s t e e r i n g,4W S )系统在20世纪80年代得到迅速发展,其中日本的H o n d a ㊁M a z d a ㊁N i s s a n 和M i t s u b i s h i 等汽车公司都推出了4W S 车辆[1]㊂4W S 控制方法是通过调收稿日期:20130816 修回日期:20150324节轮胎的侧向力来控制车辆的运动,但当侧向加速度超过0.4g 时,轮胎侧向力趋近饱和状态,车辆进入了非线性工作区域[2],因此,可用0.4g 的侧向加速度来界定4W S 系统的有效工作区域㊂针对4W S 的控制算法研究一直在进行,从最早的基于车速的定比例前馈控制[1,3],到具有横摆角速度的反馈控制[1,3],再到基于现代控制理论的最优控制㊁基于H 2㊁H ∞㊁μ综合理论及滑模㊃0521㊃中国机械工程第26卷第9期2015年5月上半月Copyright©博看网 . All Rights Reserved.变变结构的鲁棒控制[4‐5],最后还有基于模糊理论㊁神经网络理论的非线性控制[6‐7]等,都有许多研究成果㊂但是,目前在4W S 控制上还存在一些不足:①对后轮转角的范围没有明确界定;②很少顾及4W S 系统的有效工作区域;③过于强调控制的鲁棒性而忽视控制的实用性㊂本文着眼于4W S 车辆操纵稳定性的理论分析,以线性二自由度车辆模型为基础,以两种典型的控制算法为例,从理论上对4W S 车辆的特性进行研究㊂1 四轮转向的理论分析研究和实验都证明,采用线性二自由度模型设计4W S 控制器是合理的[8]㊂为了使公式具有统一的表达形式,设整车质心到前轴的距离为正,到后轴的距离为负,则线性二自由度模型[9]可以写为β㊃r éëêêùûúú㊃=-C a m u C b m u 2+1C b I z C c I zéëêêêêùûúúúúu βéëêêùûúúr +C 1m u C 2m u L 1C 1Iz L 2C 2I éëêêêêùûúúúúzδ1δéëêêùûúú2(1)C a =C 1+C 2>0C b =L 1C 1+L 2C 2<0C c =L 21C 1+L 22C 2>0式中,m 为整车质量;u 为车辆纵向速度;L 1㊁L 2分别为整车质心到前轴和后轴的距离,则轴距为L 1-L 2;C 1㊁C 2分别为前轴和后轴的轮胎侧偏刚度(左右轮胎侧偏刚度之和,均为正值);I z 为整车的横摆转动惯量;δ1㊁δ2分别为前轮和后轮转角,规定左转为正,右转为负;β为质心侧偏角;r 为横摆角速度㊂对式(1)进行L a pl a c e 变换并化简可得β(s )=s I zu C 1+P 1s 2m u 2Iz +s (I zu C a +m u C c )+P 0δ1(s )+s I zu C 2+P 2s 2m u 2I z +s (I zu C a +m u C c )+P 0δ2(s )(2)r (s)=s m u 2L 1C 1+u P 3s 2m u 2I z +s (I zu C a +m u C c )+P 0δ1(s )+s m u 2L 2C 2-u P 3s 2m u 2I z +s (I zu C a +m u C c )+P 0δ2(s )(3)P 0=(L 1-L 2)2C 1C 2-(L 1C 1+L 2C 2)m u 2>0P 1=(L 2-L 1)L 2C 1C 2-L 1C 1mu 2P 2=(L 1-L 2)L 1C 1C 2-L 2C 2mu 2>0P 3=(L 1-L 2)C 1C 2>0对P 1进行分析,可知P 1≥0 u ≤u mP 1<0u >u m }时(4)定义u m 为转折车速:u m =(L 2-L 1)L 2C 2L 1m (5)车辆的稳态侧向加速度为a *y =u 2P 3P 0δ1-u 2P 3P 0δ2(6)以0.4g 的侧向加速度来界定4W S 系统的有效工作区域,由式(6)以及转向时侧向加速度大于零的条件可得后轮转角范围为δ1-4P 0u 2P 3<δ2<δ1(7)式(7)给出的后轮的最大转角范围并没有考虑具体控制算法,当考虑具体的控制算法时,后轮转角将小于式(7)给出的范围㊂车辆稳态质心侧偏角为β*=P 1P 0δ1+P 2P 0δ2(8)车辆稳态横摆角速度为r *=u P 3P 0δ1-u P 3P 0δ2(9)以上分析同样适用于传统的前轮转向(F W S )车辆(令δ2=0)㊂以相同的前轮转角δ1(δ1>0)作为输入,当u ≤u m ㊁δ2<0时,即车速小于转折车速㊁后轮与前轮逆相位转向时,由式(7)~(9)可见,4W S 相对于F W S 减小了车辆的质心侧偏角,增大了稳态横摆角速度和侧向加速度;u >u m ㊁δ2>0,即车速大于转折车速㊁后轮与前轮同相位转向时,4W S 同样可减小车辆的质心侧偏角,同时降低横摆角速度和侧向加速度㊂此特性不依控制算法而改变,反映了4W S 系统的本质特性㊂另外需要指出的是,高速时后轮采用逆相位转向会使侧向加速度严重滞后[1,10],车辆容易出现急转现象㊂后轮与前轮逆相位转向或者同相位转向时仅能定性地分析稳态质心侧偏角及横摆角速度的变化,若要定量分析,则必须考虑具体的控制算法㊂下面给出两种典型的控制算法,进一步讨论4W S 系统的特性㊂2 两种控制算法的稳态分析根据式(8),以稳态零质心侧偏角为目标设计后轮转角(称为算法一),可得δ'2=-P 1P 2δ1(10)将式(10)进行L a pl a c e 变化后分别代入式(2)和式(3)中,可得质心侧偏角及横摆角速度对前轮转角的闭环传递函数为β'(s )δ1(s )=s I z u (C b +m u 2)P 3/P 2s 2m u 2I z +s (I z u C a +m u C c )+P 0(11)r '(s )δ1(s )=(s m u 2C c +uP 0)P 3/P 2s 2m u 2I z +s (I zu C a +m u C c )+P 0(12)算法一实际上以车速及前轮转角作为变量来计算后轮的转角,并未考虑车辆的状态,当增加横摆角速度反馈后可设计出下面的算法二㊂㊃1521㊃四轮转向车辆的操纵稳定性分析刘 刚 陈思忠 郑凯锋等Copyright©博看网 . All Rights Reserved.将式(1)的质心侧偏角微分方程重写为β㊃=-C a m u β-(C b m u2+1)r +C 1m u δ1+C 2m u δ2(13)令式(13)的质心侧偏角及其变化率都为零,则可得后轮转角为δ″2=-C 1C 2δ1+C b +m u 2C 21u r (14)将式(14)进行L a pl a c e 变换代入原车辆方程式(2)和(3)中可得质心侧偏角及横摆角速度对前轮转角的闭环传递函数为β″(s )δ1(s )=0(15)r ″(s)δ1(s )=(s m u 2+u C a )P 3s 2m u 2I z C 2+s (I z u C a C 2+m u P 2)+C aP 2(16)由式(12)和式(16)可知,两种控制算法稳态时的横摆角速度和侧向加速度均分别为r '=u P 3P 2δ1(17)a 'y =-u 2P 3P 1δ'2(18)以0.4g 的侧向加速度来判定车辆是否工作在线性区域,结合式(4)与式(18),可得出后轮转角的范围为0>δ'2>-P 1P 30.4g u2 u ≤u m 0≤δ'2≤-P 1P 30.4g u2u >u üþýïïïïm (19)可见,两种控制算法稳态时的横摆角速度和侧向加速度是相同的,印证了4W S 系统的稳态特性是不依控制算法的改变而改变的㊂两种控制算法的不同之处在于瞬态过程㊂3 四轮转向仿真分析3.1 特征根分析车辆参数如表1所示㊂表1 车辆参数参数数值m (k g)2045I z (k g ㊃m 2)5428L i (i =1,2)(m )[1.488,-1.712]C i (i =1,2)(N /r a d )[77850,76510] 系统的特征根反映了车辆转向的稳定特性,当采用算法一时,特征多项式如下:s 2m u 2I z +s (I zu C a +m u C c )+P 0=0(20)而当采用算法二时,特征多项式变为s 2m u 2I z C 2+s (I z u C a C 2+m u P 2)+C aP 2=0(21)车速由5k m /h 增至200k m /h 时,两种控制算法下特征根的分布如图1所示㊂由图1可见,两种算法的特征根都在负半轴,(a)算法一(b)算法二图1 系统特征根随车速变化曲线即系统是稳定的㊂图1中箭头方向代表速度增加方向㊂对于算法一,低速时具有负实根,高速时具有一对共轭复根,即当车速从低速增至高速时,车辆由过阻尼系统转变为欠阻尼系统㊂对于算法二,车辆一直处于过阻尼状态㊂3.2 稳态转向分析图2是稳态侧向加速度小于0.4g 的前提下,F W S 和4W S 前轮转角的界限曲线㊂两条曲线交点对应的车速为转折车速,u m =42k m /h ㊂可见,当u >u m 时,4W S 的界限值大于F W S 的界限值,即较大的前轮转角才能使4W S 系统进入非线性区域㊂图2 线性工作区域内前轮最大转角由图3可见,随着车速的增大,后轮转角由逆相位转向逐渐转变为同相位转向㊂为了保证高速情况下车辆都工作在线性区域,后轮最大转角就应该小于2.7°㊂1.δ1=0° 2.δ1=1° 3.δ1=2°4.δ1=3° 5.δ1=4°图3 稳态后轮转角由图4可见,对于F W S ,随车速增大,侧向加速度迅速增大㊂而对于4W S ,只要前轮转角输入小于3°,整个车速范围内车辆的侧向加速度一直㊃2521㊃中国机械工程第26卷第9期2015年5月上半月Copyright©博看网 . All Rights Reserved.都小于0.4g㊂可见较小的后轮转角介入,便可将车辆线性工作区域的车速提高㊂1.δ1=0°2.δ1=1°3.δ1=2°4.δ1=3°5.δ1=4°图4 稳态时侧向加速度由图5可见,当u≤u m时,4W S的横摆角速度大于F W S的横摆角速度,即表明当驾驶员以相同的横摆角速度进行转弯时,4W S下驾驶员对转向盘的输入转角要比F W S时小;当u>u m时,情况相反,即驾驶员需多打转向盘来完成转向㊂1.δ1=0°2.δ1=1°3.δ1=2°4.δ1=3°5.δ1=4°图5 稳态时横摆角速度图6给出了前轮转角为2°时,考虑轮胎侧偏角时的汽车转弯半径㊂可见,低速时4W S车辆的转弯半径小,从而提高了低速时的机动性,而高速时转弯半径大,即采用了同相位转向,提高了高速时的稳定性㊂图6 稳态时转弯半径(δ1=2°)3.3 角阶跃输入下的瞬态分析首先分析4W S时算法一的瞬态特性㊂采用前轮零时刻角阶跃作为输入,将式(12)进行L a p l a c e反变换,可得到算法一关于横摆角速度的二阶振动微分方程:r¨+2ζω0r㊃+rω20=δ1P0P3m u I zω20P2(22)其中,固有频率ω0和阻尼比ζ分别为ω0=P0m u2I zζ=I z C a+m C c2m I z P0同理,将式(16)进行L a p l a c e反变换,可得到算法二关于横摆角速度的二阶振动微分方程为r¨+2ζω0r㊃+rω20=δ1C a P3m u I z C2(23)其中,固有频率ω0和阻尼比ζ分别为ω0=C a P2m u2I z C2ζ=C a I z C2+m P22m I z C2C a P2可见,两种控制算法的固有频率和阻尼比是不同的㊂横摆角速度达到且不再超出稳态值的容许误差范围(稳态值95%~105%之间)的最短时间τ称为稳定时间㊂从图7中可以看出,当u≤u m 时,4W S控制算法一的稳定时间与F W S的稳定时间基本相同,而当u>u m时,4W S控制算法一的稳定时间远大于F W S的稳定时间,其原因是同相位转向使横摆运动响应速度减小㊂三者相比, 4W S控制算法二的稳定时间最短㊂原因由图8可见,后轮先进行逆相位转向,使之快速响应转向盘输入,加快横摆运动,使稳定时间缩短,然后立刻转变为同相位转向,以提高车辆的操纵稳定性㊂图7 达到稳态值95%的响应时间图8 后轮转角(δ1=1°,u=100k m/h)3.4 频率响应特性由图9可见,低频时,4W S算法一和算法二㊃3521㊃四轮转向车辆的操纵稳定性分析 刘 刚 陈思忠 郑凯锋等Copyright©博看网 . All Rights Reserved.的横摆角速度增益比F W S的横摆角速度增益要小得多,即高速时后轮采用同相位转向,横摆角速度明显下降㊂相比来看,算法二的共振频率点较高,所以其对应的通频带较宽,从而保证了必要的反应速度㊂从相频图上来看,4W S算法一的相位滞后略大于F W S的相位滞后,其原因依然是高速时后轮直接进行同相位转向,减小了横摆响应速度㊂算法二相频特性的绝对值较小,所以其转向失真度较小㊂图10中给出的侧向加速度频率响应与横摆角速度有着相似的特性,不再赘述㊂图9 横摆角速度频率响应(u=100k m/h)图10 侧向加速度频率响应(u=100k m/h)4 结论(1)后轮于转折车速前的同相位转向和转折车速后的逆相位转向提高了4W S车辆的低速机动性和高速操纵稳定性㊂以轮胎工作在线性区域为前提,给出了4W S后轮转角的范围,后轮转角不宜过大㊂(2)4W S系统的稳态特性不依控制算法的改变而改变㊂控制算法二能够提高车辆的响应频率,使转向过程一直处于过阻尼状态,而且增大了频响带宽,减小了横摆角速度和侧向加速度的相位滞后角㊂参考文献:[1] F u r u k a w aY,Y u h a r aN,S a n oS,e t a l.A R e v i e wo fF o u r‐w h e e l S t e e r i n g S t u d i e s f r o mt h eV i e w p o i n t o fV e h i c l eD y n a m i c sa n dC o n t r o l[J].V e h i c l eS y s-t e m D y n a m i c s,1989,18,151‐186.[2] 余志生.汽车理论[M].4版.北京:机械工业出版社,2007.[3] K o i b u c h iK,Y a m a o t oM,F u k a d aY,e t a l.V e h i c l eS t a b i l i t y C o n t r o l i nL i m i t C o r n e r i n g b y A c t i v e B r a k e[J].S A EP a p e r,960487,1996.[4] K r e u t zM,H o r nM,Z e h e t n e r J.I m p r o v i n g V e h i c l eD y n a m i c sb y A c t i v eR e a r W h e e lS t e e r i n g S y s t e m s[J].V e h i c l e S y s t e m D y n a m i c s,2009,47(12): 1551‐1564.[5] C a n a l eM,F a g i a n oL.C o m p a r i n g R e a rW h e e l S t e e r i n ga n d R e a r A c t i v e D i f f e r e n t i a l A p p r o a c h e st o V e h i c l eY a wC o n t r o l[J].V e h i c l e S y s t e m D y n a m i c s,2010,48(5):529‐546.[6] A l i r e z aA,F a r r o k h iM.H y b r i dS t a t e‐f e e d b a c kS l i d-i n g‐m o d eC o n t r o l l e r U s i n g F u z z y L o g i cf o rF o u r‐w h e e l‐s t e e r i n g V e h i c l e s[J].V e h i c l eS y s t e m D y-n a m i c s,2009,47(3):265‐284.[7] 林棻,赵又群,姜宏.基于S i m u l i n k的四轮转向汽车神经网络控制策略仿真[J].江苏大学学报:自然科学版,2008,29(5):28‐31.L i nF e n,Z h a oY o u q u a n,J i a n g H o n g.S i m u l a t i o n o fN e u r a lN e t w o r k C o n t r o lS t r a t e g y f o rF o u r W h e e l S t e e r i n g V e h i c l eB a s e do nS i m u l i n k[J].J o u r n a l o f J i a n g s u U n i v e r s i t y(N a t u r a l S c i e n c e E d i t i o n), 2008,29(5):390‐393.[8] V e l d h u i z e nTJ.Y a wR a t eF e e d b a c kb y A c t i v eR e a rW h e e l S t e e r i n g[D].E i n d h o v e n:T e c h n i s c h eU n i v e r-s i t e i tE i n d h o v e n,2007.[9] W i l l i a m sDE.G e n e r a l i s e d M u l t i‐a x l eV e h i c l eH a n-d l i n g[J].Ve h i c l eS y s t e m D y n a m i c s,2012,50(1):149‐166.[10] 喻凡,李道飞.车辆动力学集成控制综述[J].农业机械学报,2008,39(6):7‐13.Y uF a n,L iD a o f e i.R e v i e wo nI n t e g r a t e d V e h i c l eD y n a m i c sC o n t r o l[J].T r a n s a c t i o n s o f t h eC h i n e s eS o c i e t y o fA g r i c u l t u r a lM a c h i n e r y,2008,39(6):1‐7.(编辑 苏卫国)作者简介:刘 刚,男,1975年生㊂沈阳航空航天大学机电工程学院讲师㊁博士㊂主要研究方向为悬架系统理论与控制㊂发表论文10余篇㊂陈思忠,男,1958年生㊂北京理工大学机械与车辆学院教授㊁博士研究生导师㊂郑凯锋,男,1983年生㊂中国北方车辆研究所工程师㊂王文竹,男,1976年生㊂沈阳航空航天大学机电工程学院讲师㊂㊃4521㊃中国机械工程第26卷第9期2015年5月上半月Copyright©博看网 . All Rights Reserved.。
22624290_四轮转向车辆操纵稳定性的最优控制策略研究
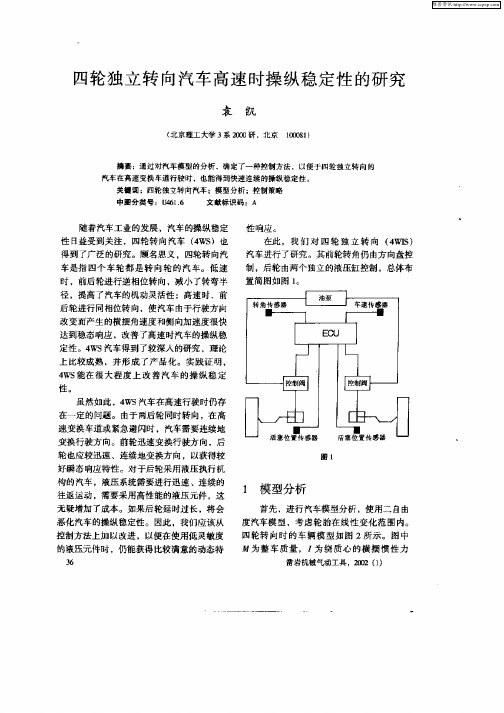
*+,#() 在不考虑车体侧倾的情况下 图 # 示出了 ) 自由度车辆转向运动模型 该模型包括了 方向的平
收 稿 日 期 !"#$%&!%!' 基金项目广西教育厅科研项目!"#!"$%&'()( !"*!+!,-"'.广西自然科学基金项目!+*/0&12344+#5/(#) 通信作者高远教授硕士生导师研究方向车辆动力学及控制6789:;* +,+-./01<#23)4.5)
)3#)%&#*#($!6%%&%&'*'($(
&&#$
式中!..(4! 4)*"最优控制系统的设计目标是求出 (,- 汽车后轮转角 ) 和横摆力矩 +!使如下的二
次型性能指标函数最小"
. 8) !
9
()+)%&,&)+9
%
&&"$
式中% 和 均为加权系数矩阵!其相应元素分别表示对状态& 和 $以及控制作用&后轮转角 ) 和横摆力
本文进一步研究 $A2 汽车的后轮转角和横摆力矩的联合控制问题)首先建立 $A2 汽车 ) 自由度转向 动力学模型模型中采用 0:8 模型刻画轮胎的非线性特性然后通过线性化二自由度 $A2 模型和理想模 型间的误差方程并采用二次型最优控制理论推导出后轮转角和横摆力矩联合控制的最优控制器其中最 优控制器中的非反馈和反馈环节分别作为控制系统的前馈控制器和反馈控制器) 车辆转向运动模型的控 制仿真结果对比研究验证了该最优控制策略的有效性)
主动四轮转向系统对高速汽车侧风稳定性的控制研究
文 章 编 号 :0 02 7 10 6 0 —0 10 10 —4 2 2 0 } 1 5 —4 0
主 动 四轮 转 向 系统 对 高 速 汽 车 侧 风 稳 定 性 的 控 制 研 究
谷正 气 , 宇奎 , 周 海贵春 , 王和毅
( 湖南大学 机械与汽车工程学 院, 湖南 长沙 4 0 8 ) 10 2
at e4 S c ud efciey i rv e il d n mi e p n ep rom a c n n a c e il tbl y u d r ci W o l fe t l mp o e v hce y a crs s e fr n ea d e h n ev hcesa it n e v v o i s ewid i n. d
Ke o d : cie4 S;hg —p e e i e iewid sa it ;c n rl yw rsat W v ih s e dv hc ;s n tbl y o to ;NN l d i
高速汽车侧风稳定性是指高速行驶的汽车在侧
风干扰 下 , 于恢 复其 原来 的运 动状 态 的能力 . 了 趋 为
维普资讯
第3 3卷 第 1 期 2 0 0 6年 2月
湖 南 大 学 学 报 (自 然 科 学 版 ) Junl f rnUnvrt( trl c ne) o ra o m i sy Naua Si cs Hu ei e
线控主动四轮转向汽车控制策略研究

线控主动四轮转向汽车控制策略研究随着汽车产业的快速发展,人们对汽车操控性能的要求也越来越高。
传统的两轮转向方式已经不能满足人们对操控性能的需求,因此出现了更加先进的线控主动四轮转向技术。
本文将研究线控主动四轮转向汽车的控制策略,探讨其优势和应用前景。
一、线控主动四轮转向技术概述1.1 线控主动四轮转向技术的定义和原理线控主动四轮转向技术是指通过电子系统将车辆前后轮轴进行联动控制,以实现车辆的更加灵活和稳定的转向。
该技术通过对车辆前轮和后轮转向角度的精确控制,提高了车辆的稳定性和操控性能。
1.2 线控主动四轮转向技术的分类线控主动四轮转向技术根据其控制方式可分为机械式和电子式两种。
机械式主要通过伺服系统和机械传动装置实现转向控制,而电子式则通过电子控制单元对转向系统进行精确控制。
二、线控主动四轮转向汽车的控制策略2.1 前轮转向角和后轮转向角的控制策略线控主动四轮转向汽车的一个重要控制策略是对前轮和后轮转向角的控制。
通过合理的计算和调整,可以使得前后轮的转向角度协调一致,从而提高车辆的操控性和稳定性。
2.2 转向角速度和转向角加速度的控制策略除了控制前后轮转向角度外,线控主动四轮转向汽车还需要考虑转向角速度和转向角加速度的控制。
通过对转向系统的精确控制,可以实现车辆转向角速度的快速响应和转向角加速度的平稳调整,提高车辆的转向性能。
三、线控主动四轮转向汽车的优势3.1 提高转弯性能和稳定性线控主动四轮转向技术可以将车辆前后轮的转向协调一致,使得车辆在转弯时更加平稳和灵活,提高了车辆的操控性能和稳定性。
3.2 增强驾驶安全性线控主动四轮转向汽车在高速行驶时,可以通过对转向系统的精确控制,提高车辆的稳定性,并减小了车辆的侧翻或翻滚的风险,增强了驾驶的安全性。
3.3 降低燃油消耗和减少轮胎磨损通过合理控制前后轮的转向角度,线控主动四轮转向汽车可以实现更小的转弯半径和更好的转向效率,从而减少车辆的能耗和轮胎的磨损,降低了燃油消耗和维修成本。
四轮驱动电动轮汽车主动变道系统的稳定性研究
四轮驱动电动轮汽车主动变道系统的稳定性研究【摘要】本文主要研究了四轮驱动电动轮汽车主动变道系统的稳定性。
在介绍了研究背景、研究目的和研究意义。
接着在详细解释了四轮驱动电动轮汽车主动变道系统的原理,进行了稳定性分析,并分析了影响稳定性的因素,介绍了稳定性测试及结果分析,提出了改进措施和建议。
最后在结论部分总结了本文的研究成果,展望未来研究方向,并探讨了研究成果的应用前景。
通过本文的研究,可以为提高四轮驱动电动轮汽车主动变道系统的稳定性提供理论支持和技术参考,推动相关领域的发展。
【关键词】四轮驱动电动轮汽车、主动变道系统、稳定性、研究、原理、稳定性分析、影响因素、测试、结果分析、改进措施、建议、总结、展望、应用前景。
1. 引言1.1 研究背景主动变道系统在实际运行中可能会遇到一些稳定性问题,如经常出现变道时的晃动或不稳定情况,这不仅会对驾驶者造成不便和不安全感,也会影响到其他道路使用者的行车安全。
对四轮驱动电动轮汽车主动变道系统的稳定性进行深入研究,有助于发现问题的根源和解决方案,提高系统的可靠性和安全性。
本研究旨在通过对四轮驱动电动轮汽车主动变道系统的稳定性进行分析和测试,探讨影响系统稳定性的因素,提出改进措施和建议,为相关领域的研究和实际应用提供参考和指导。
通过本研究,将深入了解主动变道系统的工作原理和稳定性特点,为未来智能汽车技术的发展和应用打下坚实基础。
1.2 研究目的本研究旨在探讨四轮驱动电动轮汽车主动变道系统的稳定性,通过深入分析系统的原理及影响因素,进行稳定性测试并进行结果分析。
通过研究,旨在找出影响主动变道系统稳定性的关键因素,提出改进措施和建议,为提升主动变道系统的稳定性提供理论支持。
通过本次研究,希望能够为四轮驱动电动轮汽车的主动变道系统提供更加稳定可靠的技术支持,为未来的智能汽车发展做出贡献。
1.3 研究意义汽车主动变道系统是现代汽车智能驾驶技术的重要组成部分,它能够帮助驾驶员进行安全、准确的变道操作,提高驾驶的舒适性和便利性。
四轮驱动电动轮汽车主动变道系统的稳定性研究
四轮驱动电动轮汽车主动变道系统的稳定性研究随着科技的不断发展,汽车行业也在不断向前迈进,其中最显著的一个方面就是电动车的发展。
电动车在环保、节能等方面都具有很大的优势,因此受到了越来越多的关注和青睐。
电动车在行驶过程中还存在着一些问题,比如在高速行驶时的稳定性问题。
为解决这个问题,一些汽车厂商引入了四轮驱动电动轮汽车主动变道系统,以提高汽车在高速行驶时的稳定性。
本文将对这一系统的稳定性进行深入研究。
四轮驱动电动轮汽车主动变道系统的工作原理比较简单。
该系统通过传感器感知车辆行驶状态和外界道路情况,然后通过计算机控制系统来自动调整车辆的转向和速度,使车辆在变道时保持稳定。
当驾驶员打开变道灯或者操作方向盘时,系统会自动判断车辆当前的行驶状态,并且根据道路情况和车辆性能来进行调整,从而实现平稳变道。
这样一来,就大大提高了车辆在高速行驶时的稳定性,减少了因变道而造成的事故发生的可能性。
1. 提高了驾驶安全性。
四轮驱动电动轮汽车主动变道系统可以减少驾驶员因为变道时的疏忽而引发的交通事故,保护了驾驶者的生命财产安全。
2. 提高了行驶舒适性。
该系统可以使车辆在变道时更加稳定,减少了车身的抖动和颠簸感,从而使乘坐者更加舒适。
3. 提高了行驶稳定性。
系统可以根据车辆和外部道路情况自动调整车辆的转向和速度,使车辆在变道时保持稳定,降低了发生侧滑、翻车等意外的概率。
4. 提高车辆操控性。
系统可以实时监测车辆的行驶状态,并且根据此调整车辆的转向和速度,提高了车辆的操控性和灵活性。
5. 优化了能源利用。
系统可以通过智能控制车辆的转向和速度来减少不必要的能源消耗,提高了电动车的能源利用率。
1. 系统的稳定性测试为了验证四轮驱动电动轮汽车主动变道系统的稳定性,我们设计了一系列的道路测试。
我们选取了一条具有多样复杂道路情况的测试路线,包括高速公路、城市主干道、山路等,通过实际测试来验证系统在不同路况下的稳定性表现。
在测试中,我们使用了相同配置的四轮驱动电动轮汽车,其中一部装备了主动变道系统,另一部未装备。
四轮驱动电动轮汽车主动变道系统的稳定性研究
四轮驱动电动轮汽车主动变道系统的稳定性研究
四轮驱动电动轮汽车主动变道系统的稳定性是指在变道过程中保持车辆运动的平稳性
和控制的稳定性。
主动变道系统是指通过电子控制单元和传感器等装置,对车辆进行自动
化的变道操作。
四轮驱动电动轮汽车主动变道系统需要具备适应各种路况的能力。
路况包括道路曲线、斜坡和弯道等不同的条件,车辆在不同路况下的运动特性也会有所不同。
主动变道系统需
要能够根据不同的路况条件,对转向力矩和速度进行调整,以保证变道过程的稳定性。
主
动变道系统还需要具备较高的抗干扰能力,以应对突发状况和外部干扰的影响。
四轮驱动电动轮汽车主动变道系统需要具备安全性能。
安全性能是指在车辆变道过程中,能够有效地防止发生碰撞和意外事故。
主动变道系统需要通过车辆动态感知和智能决策,实时识别和预测潜在的危险和冲突,并采取相应的控制措施,以保证车辆的安全驾
驶。
四轮驱动电动轮汽车主动变道系统需要具备可靠的性能。
可靠性是指主动变道系统在
长期运行中能够保持稳定和正常的工作状态,以及对故障和异常情况的自我诊断和修复功能。
对于主动变道系统的硬件和软件的设计和制造,需要进行严格的可靠性测试和验证,
以保证系统的可靠性和耐久性。
四轮驱动电动轮汽车主动变道系统的稳定性研究是一个复杂且关键的问题,需要考虑
到车辆的操控性能、适应各种路况的能力、安全性能以及可靠性。
只有在这些方面都考虑
到并满足相应的要求,才能实现主动变道系统的稳定和可靠运行。
四轮驱动电动轮汽车主动变道系统的稳定性研究
四轮驱动电动轮汽车主动变道系统的稳定性研究1. 引言1.1 背景介绍四轮驱动电动轮汽车是一种新型的电动车辆,其具备四个独立的电动驱动轮,并且拥有更好的操控性和稳定性。
主动变道系统作为汽车智能驾驶的重要组成部分,能够帮助驾驶员在变道时更加安全和便捷。
目前四轮驱动电动轮汽车主动变道系统的稳定性问题尚未得到充分研究和解决。
传统的汽车主动变道系统主要依赖于车辆的转向系统和驾驶员的操作,而四轮驱动电动轮汽车的主动变道系统则需要考虑更多因素,如电动轮的转速控制、车辆的动力分配等。
研究四轮驱动电动轮汽车主动变道系统的稳定性,对于提高汽车操控性和安全性具有重要意义。
本文旨在探讨四轮驱动电动轮汽车主动变道系统的稳定性问题,通过对其设计原理、稳定性分析、测试结果以及改进措施的研究,为提升四轮驱动电动轮汽车的驾驶性能提供理论支持和实践指导。
1.2 研究意义本文旨在探讨四轮驱动电动轮汽车主动变道系统的稳定性,其中对系统设计原理、稳定性分析、测试结果以及改进措施进行了深入研究。
四轮驱动电动轮汽车作为新型汽车技术的代表,具有低碳环保、高效节能等优势,在未来的交通出行中具有广阔的应用前景。
主动变道系统的稳定性一直是该技术面临的重要挑战之一,因此对其进行深入研究具有重要意义。
通过本研究,可以为四轮驱动电动轮汽车主动变道系统的设计与优化提供一定参考,提升系统的稳定性和安全性,从而更好地满足日益增长的交通需求。
本研究可以为相关领域的学术研究提供新的思路和方法,促进技术的创新与发展。
研究四轮驱动电动轮汽车主动变道系统的稳定性具有重要的理论意义和实践价值,对推动汽车行业的可持续发展具有积极的意义。
【字数:204】2. 正文2.1 四轮驱动电动轮汽车主动变道系统的设计原理四轮驱动电动轮汽车主动变道系统的设计原理是基于车辆动力学和控制理论的结合。
通过传感器实时监测车辆的速度、加速度、转向角等参数,并结合预先设定的变道规划,系统可以实现快速、准确地进行主动变道操作。
四轮驱动电动轮汽车主动变道系统的稳定性研究
四轮驱动电动轮汽车主动变道系统的稳定性研究【摘要】本文主要研究四轮驱动电动轮汽车主动变道系统的稳定性。
在分析了研究背景、研究意义以及研究目的。
在详细介绍了四轮驱动电动轮汽车主动变道系统的工作原理、设计与控制策略,进行了稳定性分析,并展示了模拟实验结果和现场实验验证。
在总结了四轮驱动电动轮汽车主动变道系统的稳定性研究成果,并提出了未来研究展望。
通过本研究,可以为提升汽车主动变道系统的稳定性提供参考,并指导未来相关研究工作的方向。
【关键词】四轮驱动、电动轮汽车、主动变道系统、稳定性研究、工作原理、设计与控制策略、模拟实验、现场实验、结论、未来研究、研究背景、研究意义、研究目的、实验结果、稳定性分析、总结、展望1. 引言1.1 研究背景随着社会科技的不断发展,汽车已成为人们日常生活中不可或缺的交通工具。
随着城市化进程的加快和交通拥堵问题日益突出,行车安全问题也逐渐凸显出来。
特别是在高速公路上行驶时,经常会遇到需要变道的情况,而传统的汽车变道方式依靠司机的操作,容易出现盲区导致事故的发生。
研究开发一种能够提高汽车主动变道安全性的系统就显得尤为重要。
近年来,随着电动车技术的飞速发展,四轮驱动电动轮汽车逐渐成为了汽车发展的趋势。
相比于传统燃油车,四轮驱动电动轮汽车具有更快的响应速度和更加灵活的控制性能,这为开发主动变道系统提供了一定的基础。
对于四轮驱动电动轮汽车主动变道系统的稳定性研究,既有理论研究意义,也有实际应用价值。
通过研究四轮驱动电动轮汽车主动变道系统的稳定性,可以为提高汽车行车安全性提供技术支持,同时也可以促进汽车技术的不断创新和发展。
1.2 研究意义研究意义:四轮驱动电动轮汽车主动变道系统的稳定性研究具有重要的意义。
随着城市交通拥堵问题日益凸显,汽车主动变道系统的研究可以有效提高交通效率,缓解交通压力。
主动变道系统可以提升驾驶的舒适性和安全性,减少交通事故的发生概率,保障驾驶员和乘客的生命安全。
四轮转向汽车稳定性控制系统研究
工学硕士学位论文四轮转向汽车稳定性控制系统研究郭静哈尔滨工业大学2008年6月国内图书分类号:U463.33国际图书分类号:629工学硕士学位论文四轮转向汽车稳定性控制系统研究硕士研究生:郭静导师:边文凤副教授申请学位:工学硕士学科、专业:车辆工程所在单位:汽车工程学院答辩日期: 2008年6月授予学位单位:哈尔滨工业大学Classified Index:U463.33U.D.C:629Dissertation for the Master’s Degree in EngineeringSTUDY ON STABILITY CONTROL SYSTEM FOR FOUR-WHEELSTEERING VEHICLESCandidate: Guo JingSupervisor: Associate Prof. Bian Wenfeng Academic Degree Applied for: Master of Engineering Specialty: Vehicle EngineeringAffiliation: College of Automobile Engineering Date of Defence: June,2008Degree-Conferring-Institution: Harbin Institute of Technology哈尔滨工业大学工学硕士学位论文摘要本文围绕四轮转向(4WS)汽车操纵稳定性控制中的直接横摆力偶矩控制系统展开研究,着重讨论了汽车稳定性控制系统的滑模变结构控制的控制逻辑与控制算法,并通过仿真分析为实际汽车操纵稳定性控制系统的设计提供了理论依据。
本文利用H.B.Pacejka教授提出的魔术公式建立了轮胎力学模型,在此基础上建立了四轮转向汽车的动力学模型,并通过仿真对车辆模型进行了验证,为控制系统的仿真分析奠定了模型基础。
分析了直接横摆力偶矩控制方法提高极限工况下弯道加速(或制动)行驶能力,从而改善汽车操纵稳定性的机理,为汽车稳定性控制提供了理论基础。
四轮转向汽车稳定性控制
四轮转向汽车稳定性控制
周淑文;张思奇;许晓东
【期刊名称】《控制工程》
【年(卷),期】2007(14)B05
【摘要】针对过分地追求减小高速转向时的横摆角速度,将导致后轮转角的随动性变差,同时也很难充分利用其机动性来提高稳定性,并且一般有较长时间滞后的问题,提出了一种利用横摆角速度反馈信息,进行再调节的控制方法。
给出一个前轮转角阶跃输入后,不是直接根据当前速度算出后轮转角,而是在忽略后轮的情况下,求出横摆角速度响应,然后和稳态横摆角速度相比较,得出一个需要调整值。
以该值通过一定的关系求出当前需要的后轮横摆角,这个过程重复进行,直到接近最优值。
仿真结果表明,该控制方法能大大缩短四轮转向系统达到稳态的时间。
【总页数】3页(P78-80)
【关键词】四轮转向;横摆率;操纵稳定性;反馈控制;超调量
【作者】周淑文;张思奇;许晓东
【作者单位】东北大学机械工程与自动化学院;沈阳建筑大学交通与机械工程学院【正文语种】中文
【中图分类】TP461
【相关文献】
1.控制器参数对四轮转向和汽车稳定性控制的影响 [J], 秦绪柏
2.极限工况下主动前轮转向汽车稳定性控制 [J], 李绍松; 郭孔辉; 仇韬; 陈虹; 王国
栋; 崔高健
3.转向工况下的分布式电动汽车稳定性控制 [J], 郭烈; 葛平淑; 许林娜; 林肖
4.滑移率控制对改善重型汽车转向制动稳定性的仿真研究 [J], 张婷婷;贾会星;杨章林
5.独立驱动电动汽车转向稳定性控制方法研究 [J], 郭烈;许林娜;孙大川
因版权原因,仅展示原文概要,查看原文内容请购买。
新能源汽车主动四轮转向稳定性控制技术刘阳勇
新能源汽车主动四轮转向稳定性控制技术刘阳勇发布时间:2023-05-10T08:11:51.789Z 来源:《教育学文摘》2023年5期作者:刘阳勇[导读] 车辆运动时可通过主动四轮转向系统控制前后轮转角提高车辆的稳定性。
主动四轮转向系统控制后轮时通常将质心侧偏角设置为0,在此情况下,驾驶员的驾驶舒适感极差,因此,需要在不改变驾驶员驾驶习惯的前提下优化汽车主动四轮转向系统。
在不同驾驶环境下车辆的轮胎侧偏刚度、质心位置和质量具有不确定性,因此在设计四轮转向系统时,应该将提高系统的鲁棒性作为目标。
基于此,本文章对新能源汽车主动四轮转向稳定性控制技术进行探讨,以供参考。
重庆交通职业学院重庆江津区 402247摘要:车辆运动时可通过主动四轮转向系统控制前后轮转角提高车辆的稳定性。
主动四轮转向系统控制后轮时通常将质心侧偏角设置为0,在此情况下,驾驶员的驾驶舒适感极差,因此,需要在不改变驾驶员驾驶习惯的前提下优化汽车主动四轮转向系统。
在不同驾驶环境下车辆的轮胎侧偏刚度、质心位置和质量具有不确定性,因此在设计四轮转向系统时,应该将提高系统的鲁棒性作为目标。
基于此,本文章对新能源汽车主动四轮转向稳定性控制技术进行探讨,以供参考。
关键词:新能源汽车;主动四轮转向;稳定性控制技术引言新能源汽车取得了快速发展,但其续航里程仍然是束缚其成长的最主要原因。
因此,如何提高新能源汽车的存储容量、发展高效率的控制系统以及充分发挥其自身的优点来延长其使用寿命,已成为当前的一个重要问题。
在城市道路上,车辆在制动时所消耗的能源约为车辆所需要的能源的50%。
一、新能源汽车新能源汽车也被称为替代燃料汽车,由非石油燃料驱动,通过应用汽车启动,电源控制等各种先进技术制造,制造出具有新结构,技术标准和先进原理的新型汽车。
目前,常见的新能源汽车主要包括天然气汽车,酒精燃料汽车,燃料电池汽车,纯电动汽车和混合动力汽车。
与传统的石油动力汽车相比,新能源汽车具有更高的能量转换效率,更好的运行性能,在节能和环保方面表现出足够强大的优势。
线控主动四轮转向汽车控制策略及试验研究
线控主动四轮转向汽车控制策略及试验研究
刘文光;徐畅;王志民;刘浩伟
【期刊名称】《农业装备与车辆工程》
【年(卷),期】2022(60)6
【摘要】传统四轮转向汽车难以同时跟踪理想的质心侧偏角和横摆角速度,在高速转弯时会出现横摆角速度的下滑,针对这种问题,提出一种线控主动四轮转向系统及其控制方法。
首先建立四轮转向汽车二自由度模型,在此基础上提出模型参考滑模控制策略,采用模糊算法对抖振进行抑制,实现对前后轮转角的主动控制,使其能够同时跟踪理想的质心侧偏角和横摆角速度。
仿真研究表明,该控制策略能够提高线控主动四轮转向汽车的机动性和操纵稳定性。
最后搭建了整车试验平台并进行测试,测试结果表明,该线控主动四轮转向系统能够实现前后轮主动转向功能。
【总页数】5页(P63-67)
【作者】刘文光;徐畅;王志民;刘浩伟
【作者单位】江苏大学汽车与交通工程学院
【正文语种】中文
【中图分类】U461.6
【相关文献】
1.基于线控转向的主动转向控制策略研究
2.线控转向系统主动转向控制策略研究
3.线控转向系统的主动转向控制策略研究
4.电动叉车线控转向系统主动转向控制策略探析
5.线控转向系统前轮主动转向控制策略研究
因版权原因,仅展示原文概要,查看原文内容请购买。
四轮驱动电动轮汽车主动变道系统的稳定性研究
四轮驱动电动轮汽车主动变道系统的稳定性研究
主动变道系统是指汽车在行驶中,通过自主感知前方道路情况和检测车辆周围的交通
状况,进行自动变道行驶的一种技术。
该技术在提高驾驶安全性、减少事故的发生率等方
面都具有积极的意义。
然而,主动变道系统在实际应用中也存在一些问题,如系统的响应速度不够快、在不
同路况下的控制能力不足等问题,这些都会影响到系统的稳定性。
因此,研究四轮驱动电
动轮车主动变道系统的稳定性,对于提高该系统的可靠性、稳定性以及使用安全性具有重
要意义。
首先,要从系统本身进行分析,对主动变道系统的控制算法、信号处理等方面进行深
入研究。
在这个基础上,还要考虑到不同路况下的控制难度,比如在高速公路和市区两种
不同路况下的控制能力不同,需要针对不同路况进行不同的系统优化和调整。
其次,要引入一些先进的技术手段,如人工智能、深度学习等,来协助系统进行自主
判断决策,提高系统的反应速度和准确性,进而提高主动变道系统的稳定性和可靠性。
最后,对于四轮驱动电动轮车主动变道系统的稳定性研究还需要进行大量的实际测试,以验证系统的可靠性和实际使用效果,并对测试结果进行深入分析,找出系统存在的问题
并进行改进和优化。
综上所述,四轮驱动电动轮车主动变道系统的稳定性研究是一个复杂而又重要的课题。
只有通过充分的科学研究和实践测试,并结合先进的技术手段,才能够提高主动变道系统
的稳定性,最终实现更加安全、稳定、高效的汽车行驶。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(4)
式中,x为网络输人向量;U为网络输出向量;W为
网络权值矩阵.对于任意权值向量w,对应于式(2)
的梯度误差可定义为:
嘉a=而DEcW Oy(k)·必OW一出“…)”·帮aW
(5)
式中8c(k)=yM(k)一y(k)神经网络的学习就是
按性能指标的负梯度方向调整神经网络权值,使其
达到最优,学习规则可由BP学习算法导出为:
通常的四轮转向系统都是根据前轮转角以及汽 车运动状态的反馈控制后轮转角,前轮转角只由方 向盘输入决定,这种控制方式并不能有效的同时控 制汽车横摆角速度和侧向加速度_5j.主动四轮转向 系统在与方向盘输入角相对应的前轮转向角基础 上,同时附加小角度的前轮控制转角,与后轮控制转 角联合,能同时有效的控制汽车的横摆运动和侧向 运动,使汽车行驶轨迹跟随参考模型.
根据受力平衡、轮胎的侧偏特性及几何关系,建 立三自由度汽车动力学方程:
f删(p+(or)一m如=助+R十R十R
<如,一切=吩一略+鸭+%
【厶妒一L纠,一咖(卢+for)=M ”q巩P—Fdt∞
(1)
式中,口为质心处的侧偏角;m,为横摆角速度;驴为 侧倾角;m为整车质量;m。为悬挂质量;g为重力加
速度;Ix为汽车悬挂质量绕轴的转动惯量;L为汽 车绕质心的横摆转动惯量;k为汽车悬挂质最绕侧 倾轴与横摆轴的惯性积;h为悬挂质量重心到侧倾 轴线的距离;h。,为风压中心到侧倾轴线的距离;u 为汽车质心处的纵向速度.
+鉴茎品瞽:营蒙i簇孬攀基金资助项目(502750520);教育部馋秀教师襄助}P划资助项日 作者简介:谷正气(1963一),男,湖南长沙人,湖南大学教授,博士生导师 L-r/1all:guznengqtuotgsobu tom
万方数据
婚车的挑选 既要尊重传统,又想紧跟潮流,究竟该选择什么样的车型做婚车才
控制系统结构如图2所示,图中z_1为单位延 时环节以汽车三自由度非线性模型为基础,将侧风 作用下的汽车作为被控对象,输人为侧风力和前、后 轮转向角,输出Y(t)定义为横摆角速度和侧偏角. YM(t),Y,(t)与Y(t)具有相同的定义.将无侧风作 用、其他行驶工况相同的汽车作为参考模型,氏。为 考虑转向系传动比情况下、与有经验的驾驶员操纵 下的方向盘角输入相对应的前轮转角,由于此时作 为参考模型的汽车总能保持很好的轨道跟随能力, 故将其输出作为被控对象要趋近的目标.
△w一一r7fc翥㈤=-鱼aU盟c(k)·掣.(6)
其中:_为学习因子;ay(^)/aL0(女)为未知非线性 系统的Jacobi矩阵.由于被控对象是未知的,应通过
NNI计算ay(&)/aUc(k).对于NNI,对应于式(3)
的梯度误差可以定义为:
一OWDE,
L☆,—矿。 ,L、Oyr(k)
,L、aU(k)
车祸再所难免。但是如果婚车在途中出事故,甚至喜事变丧事,那 简直是不可承受的痛。为了保证婚礼顺顺利利,新人不管选什么车,安 全都不能忽略。
像这样有过“前科”的车型,恐怕准备办喜事的新人们还是选择性的 “失明”为好. /news.php
最近网上惊爆的“加长车”事件,就值得警醒:为了长面子,很多人 喜欢租借加长版的凯迪拉克或林肯,孰不知很多婚庆公司提供的加长车 都是自己拼接而成的,安全成极大隐患。
BP Neural Network(NN)was applied to active 4WS,which was used to control the front wheel and re{ff wheel
steering angle,then the controlled vehicle should follow the reference model.Simulation results showed that the
图2 神经网络模型参考自适应控制结构 Fig 2 Structure of MRAC based on NN
控制系统中应用2个3层(3—8—2)BP神经网络
万方数据
第1期
谷正气等:主动四轮转向系统对高速汽车侧风稳定性的控制研究
53
分别建立神经网络辨识器(NNI)和控制器(NNC), BP网络结构如图3.控制器NNC的输出为前、后轮 控制转角,前轮控制转角和与转向系统关联的前轮 转角叠加,再与后轮控制转角共同作为被控对象的 输入.
active 4WS could effectively improve vehicle dynamic response performance and enhance vehicle stability under
side wind
Key words:active 4WS;high-speed vehicle;side wind stability;control;NN
图3 BP神经网络结构示意图 Fig 3 Structtme of BP neural network
NNC的训练是利用BP网络的误差反向传播特 性,用被控对象与参考模型输出之间的偏差ec(t) 反向传播来实现的.由于被控对象不能事先确定, 即,er(t)无法通过被控对象的输入与输出之间的 既定关系实现反向传播.为解决这一问题,引入神经 网络辨识器NNl,利用被控对象的输入输出历史数 据对其进行训练,使之与被控对象特性相匹配,即作 为被控对象的黑箱模型在这种结构中,相当于2个
另外,本田雅阁也不是婚车的理想选择,曾经轰动一时的“婚礼门” 事件,恐怕还是能让很多人记忆犹新:因为在碰撞中完全没能对驾驶和 乘坐人员起到保护作用,车身尽毁,一场本不致命的交通事故却让两位 新人撒手人间。
湖南大学学报(自然科学版)
2006年
1 考虑侧风的汽车三自由度非线性方程
和车体侧偏角决定的,本文采用横摆角速度和侧偏 角作为表征汽车运动的状态变量.
扰的能力【2 J.但是文献[2]中没有对侧风作用下汽 车的动态响应及4WS对汽车侧风稳定性的控制效 果进行研究.在此基础上,本文建立了考虑侧风作用 的汽车三自由度非线性模型.将基于神经网络的模 型参考自适应控制(NNMRAC)策略应用于主动四 轮转向系统,汽车运动状态和行驶环境信息的实时 反馈作为控制器的输入信息,控制器输出控制前、后 轮转向角,使侧风作用下的汽车运动跟随参考模 型[3].
高速汽车侧风稳定性是指高速行驶的汽车在侧 风干扰下,趋于恢复其原来的运动状态的能力.为了 消除侧风的影响,驾驶员或由于忙于操纵极易过早 疲劳,或因反应不及而可能发生交通事故.因此,研 究高速汽车侧风稳定性的自主控制是很有必要的.
汽车侧风稳定性通常是通过侧风作用下汽车的 响应进行评价,主要评价指标有横摆角速度和侧向 加速度f1 J基于神经网络的四轮转向控制系统应用 于汽车,能改善汽车的动态响应特性和抵抗侧向干
谷正气,周宇奎,海贵春,王和毅
(湖南大学机械与汽车工程学院,湖南长沙410t)82)
摘要:建立了考虑侧风作用的汽车三自由度非线性动力学模型,应用基于BP神经网 络的模型,参考自适应控制方法设计了主动四轮转向控制系统,并对非线性汽车模型进行了 控制仿真.仿真结果表明,主动四轮转向系统能够有效的减小侧风时高速行驶汽车运动状态 的影响,提高侧风稳定性.
神经网络模型参考自适应控制方法通过提供一 个期望的参考模型,要求被控对象输出能够跟随参 考模型的输出.神经网络具有非线性映射、白适应学 习、并行处理和多输人多输出能力,且BP神经网络 已被证明能够逼近任意连续有界非线性函数.自适 应控制是以参考模型与被控对象对应变量的当前输 出相比较的结果,来指导BP神经网络对控制器参 数进行实时修正,使被控对象的输出按照一定的动 态趋于给定性能指标
“新”——用新上市的车型来做婚车,可以有效地避免亲友和路人的 “视觉疲劳”。最近有新人用荣威 750 开道,吸引来不少路人的抓拍。可 见,英伦味十足的荣威的确相当唬人,即新鲜又气派。
“奇”——敞篷、加长、越野、mini……这些车已经不够“奇怪”了。 如今的新人怪招多多:军用车队、公交车队、自行车队、人力车队…… 即便车型过于平民,也可以用数量来造势,由车友慷慨相助而成的奇瑞、 POLO 婚车队开在马路上亦十分风光。
BP神经网络的串接me(t)即可通过NNI反向传播
至NNC. 由于BP神经网络的初始权值和阈值是不确定
的,必须先对网络进行离线学习NNC,NNI训练的 误差函数定义为:
Ec=告∑[y(£)晰(f)]2.
(2)
-
f
毋=告∑[y(£)一yf(£)]2.
(3)
-t
神经网络通常可以表示成以下形式:
u(k)=删(X,w).
奔驰做头车的话,尾车则不宜用桑塔纳,因为会有“奔丧”的谐音。 车标如果有吉祥的含义更好,比如荣威的双狮车标,就有“成双成
对”的美意,而标致的单狮难免有“孤寡”的意思。 婚车一开到路上,就 必定要引来路人的评头论足。所以,现在的新人越来越在意婚车的“舆 论效应”——不求最贵,但求最新。于是,我们就看到了层出不穷的“新、 奇”婚车。 /special.php
el(々J—丽厂2—8J
(7)
式中:el(k)=Yl(k)Y(k). 转化为ou,(k)/OW和OUc(k)/aw的表达式
最合时宜呢? 婚车:好彩头 /guide.php 结婚是喜事,处处讲究讨个口彩,婚车自然也不例外。 相对而言,婚车的头车用白色或红色更好,因为白色有“白头偕老”
的语意,红色则象征夫妻生活红红火火。 另外,婚车尽量不选择两厢车,避免“有始无终”、“有头无尾”。用
第33卷第l期 2 0 0 6年2月
湖南大学学报(自然科学版) Journal of Hunan University(Natural Sciences)
文章编号:1000—2472(2006)01—0051—04
主动四轮转向系统对高速汽车 侧风稳定性的控制研究+
v01.33.No.1 Feb.2 0 0 6
本文在考虑风的随机扰动情况下,建立了风速为 10 m/s、侧风带宽度为9 m的侧风风谱(如图4(a)),模 拟作用于汽车的侧风当汽车行驶速度为120 kn。/h 时,侧风作用于汽车的持续时问约为0.3 s.