CJ1W-SRM21
欧姆龙 CJ1W-NC113 213 413 133 233 433 位置控制单元 说明书

CJ1W-NC113/213/413/133/233/433位置控制单元操作手册2003年2月修订ivv注意:欧姆龙制造的产品应根据有资格的操作者的正确程序并且仅使用本手册所描述的用途。
下面的约定用来标明在此手册中的警惕的种类。
要时刻注意有这些信息的地方。
如果不注意这些警惕会导致人和财产的伤害。
! 标明是紧急的危险状态,如果不避免将会导致死亡和严重的伤害。
! 标明是潜在的危险状态,如果不避免将会导致死亡和严重的伤害。
! 标明是潜在的危险状态,如果不避免将会导致轻或中等伤害或者损害财产。
欧姆龙产品参考所有的欧姆龙的产品在本手册都是大写。
“Unit”这个单词在指欧姆龙的产品时也要大写,而不管它是否出现在产品的合适的名字里。
缩写“Ch,”在一些展示和欧姆龙产品出现意为“字”,表示此意时在文档中也缩写为“Wd”。
“PLC”这个缩写意思为可编程控制器。
然而,“PC” 在一些可编程设备展示时意思也为可编程控制器。
视觉教具出现在手册左栏的下面的标题用来帮助你查找不同种类的信息。
表明对于有效的和方便的操作产品尤为有影响的。
1,2,3... 1.表明一种或者另一种的列表,比如程序,校验列表等。
OMRON, 2001保留的所有的权利。
未经欧姆龙公司的许可,不得以任何形式(机械的,电子的,影印的或其它)和手段(复制,存于检索系统或传递)使用本出版物的任何内容。
未经许可不可使用 在这里的信息。
此外,欧姆龙一直努力提高它的高质量产品,本手册包含的信息如果没有注释将遭受改变。
在准备本手册时已经考虑了任何预防。
虽然如此,欧姆龙对于过失或疏忽不负任何责任。
任何使用本出版物包含的信息所导致的伤害也不负任何责任。
危险警告注意注vi预防措施. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii 1针对的对象. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xiv2主要预防措施. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xiv3安全预防措施. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xiv4操作环境预防措施. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xvi5应用预防措施. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xvii6和EC指令兼容. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xix第1章介绍. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 1-1特点. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21-2系统配置. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41-3基本操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51-4功能列表. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .81-5说明书. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .101-6已有型号的比较. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .131-7控制系统原则. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14第2章基本步骤. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17第3章安装和连线. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 3-1术语和功能. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .223-2区域分配. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .233-3安装. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .243-4外部输入/输出电路. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .273-5连线. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .373-6不同类型电机驱动器的连接实例. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .463-7未使用轴的连接. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .573-8伺服继电器单元. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .58第4章数据区域. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61 4-1总体结构. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .624-2数据区域. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .644-3公共参数区域. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .674-4轴参数区域. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .714-5操作存储器区域. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .904-6操作数据区域. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .934-7存储器操作数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .964-8区数据区域. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .99第5章传送和保存数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101 5-1传送和保存数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1025-2用写数据位写数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1095-3用读数据位读数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1155-4用IOWR写数据 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1205-5用IORD读数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .126vii5-6保存数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .130 5-7用CX-Position进行数据传送 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .132第6章定义原点. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133 6-1概要. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .134 6-2原点搜索过程. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .135 6-3原点搜索需要的数据设置. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .136 6-4原点搜索操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .138 6-5原点搜索时间图. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .153 6-6当前位置预置. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .158 6-7原点返回. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .159 6-8Z相边缘. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .161第7章直接操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163 7-1概要. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .164 7-2直接操作过程. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .165 7-3为直接操作设置数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .165 7-4对直接操作的操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .167 7-5直接操作时序图. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .169 7-6加速/减速. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .171 7-7样本程序. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .174第8章存储操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177 8-1概要. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .178 8-2存储操作过程. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .182 8-3为存储操作设定数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .182 8-4定位序列. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .184 8-5完成码. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .191 8-6线性插补. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .196 8-7传送定位序列. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .199 8-8存储操作时序图. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .202 8-9加速/减速. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .205 8-10样本程序. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .208第9章其他操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211 9-1点动. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .213 9-2示教. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .215 9-3中断进给. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .217 9-4强迫中断. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .220 9-5减速停止. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .222 9-6Override. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .227 9-7偏差计数器复位输出和原点调整命令输出. . . . . . . . . . . . . . . . . . . . . . . . . . . . .230 9-8间隙补偿. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .234 9-9软件限位. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .236 9-10停止功能. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .239viii第10章程序实例. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241 10-1 程序例子的操作过程. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24210-2存储器操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24410-3直接操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26010-4轴线性差值法. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26710-5使用极限输入来进行原点搜索. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27310-6在脉冲输出中使用Override来改变速度. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27510-7传送和保存数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .278第11章故障表. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285 11-1故障检修表格. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28611-2介绍. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29311-3LED错误指示 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29511-4读错误代码. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29711-5错误代码列表. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29811-6释放脉冲输出禁止和在发生错误后复位. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31311-7在CPU中的错误显示 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31611-8用CX-Position读错误信息 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .316第12章维护和检测 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 317 12-1检测. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31812-2常规检测. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31812-3预防处理. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31912-4替换PCU的步骤 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .319附录A性能特性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .321B估计对于加速/减速的时间和脉冲. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .329C公共参数区 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .331D错误码列表 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .333E参数代码表. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .337ix关于此手册:本手册描述了CJ1W-NC113/NC133/NC213/NC233/NC413/NC433定位控制单元的操作方法,包含下面讲述的几个部分。
CJ1W-CIF21 简单通讯单元操作手册(中文)

1-1 概述. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
1-2 处理部件数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
缩写 “PC”只表示可编程序控制器的意思,并且不表示其他任何缩写。
辅助信息
手册中左列的下列首标用于帮助显示不同类型的信息。 注 实际有用的指示信息。使产品的操作更有效、方便。
指示相关题目的可能对用户有用的辅助信息。 1,2,3... 1. 指示一个步骤表,检查表等。
OMRON, 2001
版权所有,没有得到 OMRON 的书面许可。不允许将本刊物的任何部分以任何形式或任何手段 (机械、电子、照 相复制、记录等)进行翻版、存储或传播。 对使用本手册包含的信息没有特许的责任,并且由于 OMRON 一直致力于改进它的高质量的产品,本手册中所包含 的信息在进行修改时不作预告。虽然本手册已经作了各种预防措施,但不会对由于使用本刊物所含的信息可能造成 的损坏承担任何责任。
4-1 数据存储器 (DM) 分配 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
34
4-2 共享区. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CJ1W-SCU模块做无协议通讯

CJ1W-SCU模块做无协议通讯制作时间:2015.12硬件设备:CP1H-XA40DT-D(PLC)、CJ1W-SCU41-V1(串口模块)、CP1W-EXT01(CJ连接适配器)、XW2Z-200S-V(232通讯电缆)软件:CX-Programmer、commix案例简介:CJ1W-SCU模块通过无协议功能,通过TXDU与RXDU指令,与计算机调试工具进行通讯。
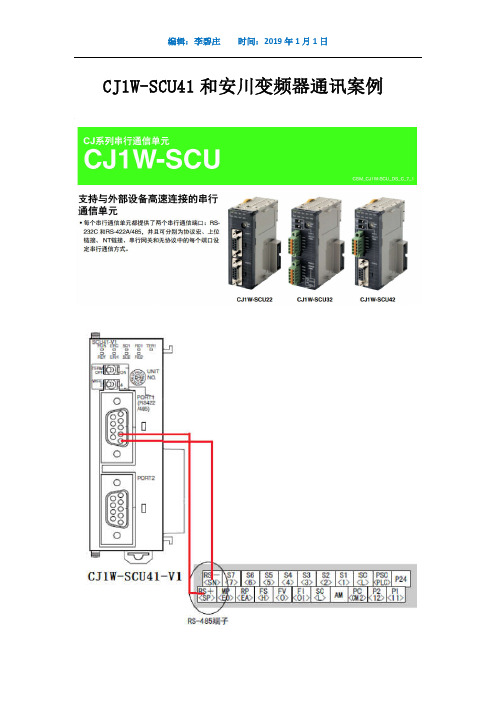
1.系统概述,硬件搭建和接线将PLC和模块拼接好,用XW2Z-200S-V将串口2和电脑的串口连接。
图1-1XW2Z-200S-V电缆制作方法:图1-22.操作步骤(1)硬件设置:a.CJ1W-SCU41-V1模块拨码含义与设置如下:图2-1本案例仅使用232口,因此终端电阻拨码与2线/4线切换拨码均无效,可以任意设置,模块单元号设置2。
(2)软件操作:a.软件CX-Programmer在线,编程模式下,在IO表和单元设置中创建IO表,双击槽位上的模块,显示Port2的参数设置,如下图所示:图2-1选User settings,选通讯模式为无协议(No-Protocol)、7位数据位、2位停止位、偶校验,其它参数默认即可。
b.编写TXDU与RXDU指令,如图2-2所示:图2-2TXDU指令表示发送D0开始的4字节数据,D10为控制字,D10=#0000,D11=#0212,具体含义如下:图2-3其中C+1的 12-15 位的 0 表示使用内部逻辑端口 0, 8-11位的 2 是串口2,0-7位的 12 是 10+单元号(这里的单元号是 2)。
RXDU指令表示接收3字节的数据,保存到D4开始的地址中。
D20为控制字,D20=#0000,D21=#0212,参数含义与TXDU指令一样。
3.现象和结论(1)TXDU指令现象:a. 在D0的地址内写入#1111,D1内写入#2222,作为等待发送的数据图3-1b.导通W0.00,触发TXDU指令,发送4个字节的数据到串口,打开串口调试助手,接收到数据11 11 22 22,如下图所示:图3-2(2) RXDU指令现象:a、在串口调试助手中写入33 22 11数值,点击发送,地址CIO1570(接收计数器)内数值为3,表示串口缓存接收到3个字节的数据,图3-3b、导通W0.01,触发RXDU接收指令,D4和D5收到数据#33 22 、#1100,由于指令里指定接收数据是从高位开始存放,D5的低8位没有数据为00,此时接收计数器为0,表示数据从串口缓存接收到了PLC的地址里,如下图所示:图3-44.注意事项(1)CJ1W-SCU系列模块的485模式不支持无协议功能,请使用协议宏功能与设备通讯。
欧姆龙CJ1W-MD211模块使用说明和程序案例

OMRON-cj1w-pa205r
OMRON-cj1w-pa205r
接近开关是一种无需与运动部件进行机械直接接触而可以操作的位置开关,当物体接近开关的感应面到动作距离时,不需要机械接触及施加任何压力即可使开关动作,从而驱动直流电器或给计算机(plc)装置提供控制指令。
接近开关是种开关型传感器(即无触点开关),它既有行程开关、微动开关的特性,同时具有传感性能,且动作可靠,性能稳定,频率响应快,应用寿命长,抗干扰能力强等、并具有防水、防震、耐腐蚀等特点。
产品有电感式、电容式、霍尔式、交、直流型。
接近开关又称无触点接近开关,是理想的电子开关量传感器。
当金属检测体接近开关的感应区域,开关就能无接触,无压力、无火花、迅速发出电气指令,准确反应出运动机构的位置和行程,即使用于一般的行程控制,其定位精度、操作频率、使用寿命、安装调整的方便性和对恶劣环境的适用能力,是一般机械式行程开关所不能相比的。
它广泛地应用于机床、冶金、化工、轻纺和印刷等行业。
在自动控制系统中可作为限位、计数、定位控制和自动保护环节等。
OMRON-cj1w-pa205r。
OMRON-cj1w-pa202
OMRON-cj1w-pa202
接近开关是一种无需与运动部件进行机械直接接触而可以操作的位置开关,当物体接近开关的感应面到动作距离时,不需要机械接触及施加任何压力即可使开关动作,从而驱动直流电器或给计算机(plc)装置提供控制指令。
接近开关是种开关型传感器(即无触点开关),它既有行程开关、微动开关的特性,同时具有传感性能,且动作可靠,性能稳定,频率响应快,应用寿命长,抗干扰能力强等、并具有防水、防震、耐腐蚀等特点。
产品有电感式、电容式、霍尔式、交、直流型。
接近开关又称无触点接近开关,是理想的电子开关量传感器。
当金属检测体接近开关的感应区域,开关就能无接触,无压力、无火花、迅速发出电气指令,准确反应出运动机构的位置和行程,即使用于一般的行程控制,其定位精度、操作频率、使用寿命、安装调整的方便性和对恶劣环境的适用能力,是一般机械式行程开关所不能相比的。
它广泛地应用于机床、冶金、化工、轻纺和印刷等行业。
在自动控制系统中可作为限位、计数、定位控制和自动保护环节等。
OMRON-cj1w-pa202。
有关CJ1W-AD041-DA041-v1使用需要注意的几点
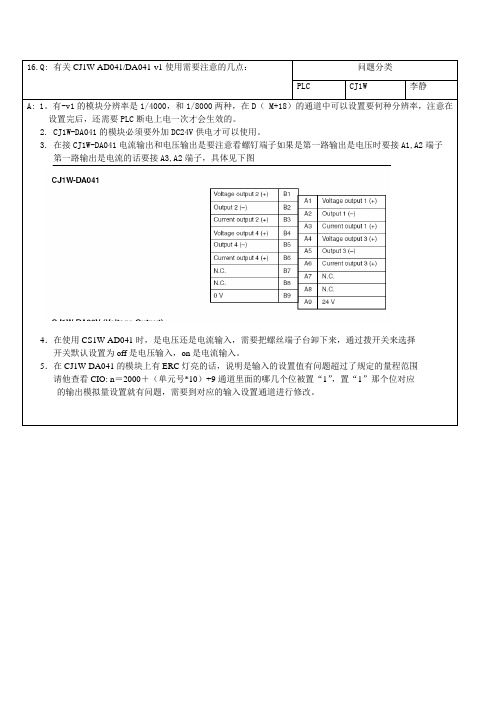
第一路输出是电流的话要接A3,A2端子,具体见下图
4.在使用CS1W-AD041时,是电压还是电流输入,需要把螺丝端子台卸下来,通过拨开关来选择
开关默认设置为off是电压输入,on是电流输入。
5.在CJ1W-DA041的模块上有ERC灯亮的话,说明是输入的设置值有问题超过了规定的量程范围
16.Q:有关CJ1W-AD041/DA041-v1使用需要注意的几点:
问题分类
PLC
CJ1W
李静
A: 1。有-v1的模块分辨率是1/4000,和1/8000两种,在D(M+18)的通道中可以设置要何种分辨率,注意在设置完后,还需要PLC断电上电一次才会生效的。
2. CJ1W-DA041的模块必须要外加DC24V供电才可以使用。
请他查看CIO: n=2000+(单元号*10)+9通道里面的哪几个位被置“1”,置“1”那个位对应
的输出模拟量设置就有问题,需要到对应的输入设置通道进行修
CJ1W-SCU41-V1和安川变频器通讯
通讯序列 编辑
写通讯数据说明: 站号 + 功能码 + 通讯地址 + 数据(比如写入频率多少) + 校验码
<a> 站号选择,关联到 Address<a>那边,在上面站号关联了 D10000 [6] 功能码,写是 6,读是 3 [0280] 通讯地址,也可以关联 D 区由程序来设定。 (R(DM11000),2) 写入频率对应的程序 D 区,后面的 2 表示 2 个字节。 <C> 校验码,校验码计算根据 Chesk code<c>那边定 读通讯数据说明 站号 + 功能码 + 通讯地址 + 连续读通道个数(字) + 校验码
3.指令序列添加 选择执行哪一条序列号
指定使用的指令序
在指令序列中选择需要执行的报文和顺序,如下
设定相关监视时间
报文执行顺序举例如下
序列号
包含发送和 接收报文
指定发送报文 使用哪一条
指定接收报文 使用哪一条
逻辑顺序执行完成 是结束还是下一条
编辑:李碧庄 时间:2019 年 1 月 1 日
三、 发送报文和接收报文编辑
编辑:李碧庄 时间:2019 年 1 月 1 日 2、 Receive Message List 接收报文编写和分析
报文名称
自己定义
校验方式 选择
通讯站号 选择
通讯序列 编辑
响应帧:写 站号 + 功能码 + 响应数据存放地址(后面的 4 是四个字节数) + 校验码
响应帧:读 站号+功能码+响应回来字节数+响应数据存放地址(后面的 4 是四个字节数)+校验码
1.软件认识
OMRON欧姆龙CJ1W-ID211
OMRON欧姆龙CJ1W-ID211
接近开关是一种无需与运动部件进行机械直接接触而可以操作的位置开关,当物体接近开关的感应面到动作距离时,不需要机械接触及施加任何压力即可使开关动作,从而驱动直流电器或给计算机(plc)装置提供控制指令。
接近开关是种开关型传感器(即无触点开关),它既有行程开关、微动开关的特性,同时具有传感性能,且动作可靠,性能稳定,频率响应快,应用寿命长,抗干扰能力强等、并具有防水、防震、耐腐蚀等特点。
产品有电感式、电容式、霍尔式、交、直流型。
接近开关又称无触点接近开关,是理想的电子开关量传感器。
当金属检测体接近开关的感应区域,开关就能无接触,无压力、无火花、迅速发出电气指令,准确反应出运动机构的位置和行程,即使用于一般的行程控制,其定位精度、操作频率、使用寿命、安装调整的方便性和对恶劣环境的适用能力,是一般机械式行程开关所不能相比的。
它广泛地应用于机床、冶金、化工、轻纺和印刷等行业。
在自动控制系统中可作为限位、计数、定位控制和自动保护环节等。
OMRON欧姆龙CJ1W-ID211。
欧姆龙cj1w-pa205r
欧姆龙cj1w-pa205r
接近开关是一种无需与运动部件进行机械直接接触而可以操作的位置开关,当物体接近开关的感应面到动作距离时,不需要机械接触及施加任何压力即可使开关动作,从而驱动直流电器或给计算机(plc)装置提供控制指令。
接近开关是种开关型传感器(即无触点开关),它既有行程开关、微动开关的特性,同时具有传感性能,且动作可靠,性能稳定,频率响应快,应用寿命长,抗干扰能力强等、并具有防水、防震、耐腐蚀等特点。
产品有电感式、电容式、霍尔式、交、直流型。
接近开关又称无触点接近开关,是理想的电子开关量传感器。
当金属检测体接近开关的感应区域,开关就能无接触,无压力、无火花、迅速发出电气指令,准确反应出运动机构的位置和行程,即使用于一般的行程控制,其定位精度、操作频率、使用寿命、安装调整的方便性和对恶劣环境的适用能力,是一般机械式行程开关所不能相比的。
它广泛地应用于机床、冶金、化工、轻纺和印刷等行业。
在自动控制系统中可作为限位、计数、定位控制和自动保护环节等。
欧姆龙cj1w-pa205r。
CJ1W-CRM21学习笔记
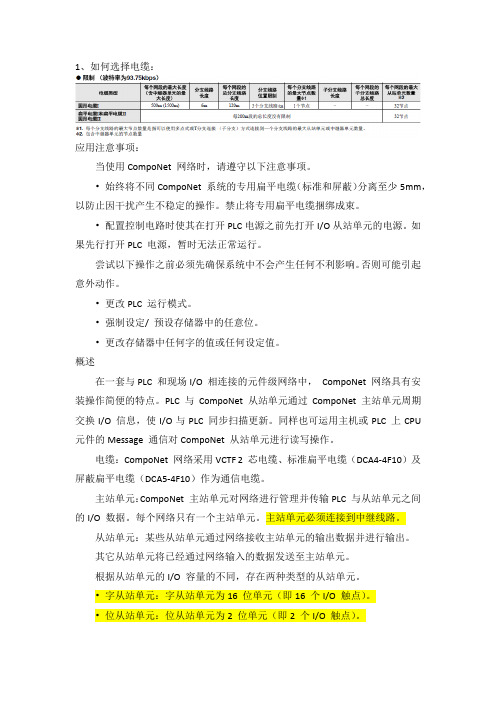
1、如何选择电缆:应用注意事项:当使用CompoNet 网络时,请遵守以下注意事项。
•始终将不同CompoNet 系统的专用扁平电缆(标准和屏蔽)分离至少5mm,以防止因干扰产生不稳定的操作。
禁止将专用扁平电缆捆绑成束。
•配置控制电路时使其在打开PLC电源之前先打开I/O从站单元的电源。
如果先行打开PLC 电源,暂时无法正常运行。
尝试以下操作之前必须先确保系统中不会产生任何不利影响。
否则可能引起意外动作。
•更改PLC 运行模式。
•强制设定/ 预设存储器中的任意位。
•更改存储器中任何字的值或任何设定值。
概述在一套与PLC 和现场I/O 相连接的元件级网络中,CompoNet 网络具有安装操作简便的特点。
PLC 与CompoNet 从站单元通过CompoNet 主站单元周期交换I/O 信息,使I/O与PLC 同步扫描更新。
同样也可运用主机或PLC 上CPU 元件的Message 通信对CompoNet 从站单元进行读写操作。
电缆:CompoNet 网络采用VCTF 2 芯电缆、标准扁平电缆(DCA4-4F10)及屏蔽扁平电缆(DCA5-4F10)作为通信电缆。
主站单元:CompoNet 主站单元对网络进行管理并传输PLC 与从站单元之间的I/O 数据。
每个网络只有一个主站单元。
主站单元必须连接到中继线路。
从站单元:某些从站单元通过网络接收主站单元的输出数据并进行输出。
其它从站单元将已经通过网络输入的数据发送至主站单元。
根据从站单元的I/O 容量的不同,存在两种类型的从站单元。
•字从站单元:字从站单元为16 位单元(即16 个I/O 触点)。
•位从站单元:位从站单元为2 位单元(即2 个I/O 触点)。
根据环境电阻的不同,存在两种类型的位从站单元:IP20 从站单元与IP54 从站单元。
根据环境电阻的不同,存在两种类型的扁平电缆:即标准扁平电缆与屏蔽扁平电缆。
中继器:通过使用中继器能够以如下方式拓展网络连接:•延长电缆长度•增加节点数量•利用中继线路与次中继线路构建远距离T 支路(参见注)。
CJ1W模拟量使用手册
13
14 19 26 30 34 41 49 57
第3章 CJ 系列模拟量输入单元 . . . . . . . . . . . . . . . . . . . . . . . . . .
3-1 3-2 3-3 3-4 3-5 3-6 3-7 3-8 规格 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 操作步骤 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 元件和开关设置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 配线 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 与 CPU 单元交换数据 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 模拟量输入功能和操作步骤 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 调整偏移和增益 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 处理错误和警报 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
OMRON SYSMAC CJ1W-NCF71位置控制单元 说明书

ԡ㕂 SYSMAC CJ1W-NCF71 㓪 ˖W426-CN5-03㓪 ˖W426-CN5-03200602S01㓪 : W426-CN5-03 SYSAC CJ1W-NCF71ԡ㕂 CJ1W-NCF71 位置控制单元操作手册2006年3月修订ivv注意:欧姆龙产品是为合格的操作人员按照正常步骤使用,并只为本手册中所叙述的目的而制造的。
下列约定是用来指出本手册中的注意事项,并对其进行分类。
始终注意它们所规定的情况。
不注意这些事项可能导致对人体的伤害或危及财产。
!表示一个紧迫的危险情况,如不避免可能导致死亡或严重伤害。
! 表示一个潜在的危险情况,如不避免可能导致死亡或严重伤害。
! 表示一个潜在的危险情况,如不避免可能导致轻度或中度伤害,或财产损失。
欧姆龙产品附注所有欧姆龙产品在本手册中都用大写字母表示,当“单元”表示欧姆龙产品时,它也以大写字母表示,不管它是否以产品的正式名称表示。
缩写“Ch ”出现在某些显示中和某些欧姆龙产品上,往往表示“字”,在这个意义上在文件中缩写为“Wd ”。
缩写“PLC ”表示可编程序控制器, 但是“PC ”在某些编程设备的显示中也表示可编程序控制器。
直观标题列在本手册左侧的下列标题是帮助读者确定各种不同类型的资料。
注表示对有效而方便地运用产品特别重要的资料。
1,2,3... 1.表示一种或另一种的列举说明,如步骤,检查表等。
© OMRON, 2004版权所有,事先未经欧姆龙公司书面许可,本手册中的任何部分不可用任何形式,或用任何方法,机械的、电子的、照相、录制或其他方式进行复制、存入检索系统或传送。
关于使用这里所包含的资料不负专利责任。
然而,因为欧姆龙公司不断努力改进其高质量的产品,所以本手册中所含有的资料可随时改变而不另行通知。
在编写本手册时,注意了一切可能的注意事项,对于仍然可能出现的错误或遗漏欧姆龙公司将不承担责任,对于使用本手册中所包含的资料导致的损害也将不承担任何责任。
欧姆龙PLC CJ1W-NC133 常见问题及解决方案集锦

欧姆龙PLC CJ1W-NC133 常见问题及解决方案集锦Q:CJ1W-NC133报错7100,如何处理?A:原因:相对移动命令的位置定义在可设置的范围外(–1,073,741,823 到1,073,741,823 脉冲)。
解决方法:在把位置定义改正到可设置范围内的值后再次执行命令。
Q:CJ1W-NC133报错7101,如何处理?A:原因:相对移动命令的速度定义是0 或者超过了轴参数的最大速度。
解决方法:在把速度定义改正到可设置范围内的值后再次执行命令。
Q:CJ1W-NC133报错7200,如何处理?A:原因:中断进给的位置定义在可设置的范围外(–1,073,741,823 到1,073,741,823 脉冲)。
解决方法:在把位置定义改正到可设置范围内的值后再次执行命令。
Q:CJ1W-NC133报错7103,如何处理?A:原因:相对移动命令的减速时间定义在可设置的范围外(0 到250 ms)。
解决方法:在把减速时间改正到可设置范围内的值后再次执行命令。
Q:CJ1W-NC133报错7203,如何处理?A:原因:中断进给的减速时间定义在可设置的范围外(0 到250 ms)。
解决方法:在把减速时间改正到可设置范围内的值后再次执行命令。
Q:CJ1W-NC133报错7201,如何处理?A:原因:中断进给的速度定义是0 或者超过了轴参数的最大速度。
解决方法:在把速度定义改正到可设置范围内的值后再次执行命令。
Q:CJ1W-NC133报错7202,如何处理?A:原因:中断进给的加速时间定义在可设置的范围外(0 到250 ms)。
解决方法:在把加速时间定义改正到可设置范围内的值后再次执行命令。
Q:CJ1W-NC133报错7300,如何处理?A:原因:原点返回的速度定义是0 或者超过了轴参数的最大速度。
解决方法:在把速度定义改正到可设置范围内的值后再次执行命令。
Q:CJ1W-NC133报错7301,如何处理?A:原因:原点返回的加速时间定义在可设置的范围外(0 到250 s)。
欧姆龙plccj1w初始脉冲定义
欧姆龙plccj1w初始脉冲定义
欧姆龙plccj1w由STOP变为run状态的首次扫描时为ON,可以用它们的常开触点来执行某些初始化工作,例如将有掉电保持功能的辅助继电器、计数器和状态继电器复位,给某些数据寄存器或辅助继电器置初值等。
LC启动第一次,y0亮,关机,PLC第二次开启,y0不亮,第三次启动,y0又亮,反复交替。
M500为停电保持型辅助继电器。
当然实际程序中一般很少这样用到,示例说明只为开扩思路,比如上述程序你可以加一个计数器,计算PLC开关机的次数统计。
欧姆龙plccj1w初始脉冲定义:
1、PLC与步进电动机或伺服电动机的驱动器相匹配,采用
CW/CCW脉冲输出、脉冲+方向输出,控制电动机的速度、位置、转矩运行。
2、通过方向自动选择功能(根据指令指定的脉冲输出量与脉冲输出当前值相比为正或负确定运行方向),控制电动机在绝对坐标系上定位。
3、可进行三角控制(无恒定速度时间的T型控制)。
加减速必要的脉冲输出量超过设定的目标脉冲输出量的情况下进行此控制方式。
4、用PLS2指令在定位中可变更定位目标位置(多重启动),可变更位置、速度、加减速度类似于变频器的多段速控制。
5、可以在速度控制模式下,通过触发条件(中断恒定距离进给)
转变为定位控制模式。
6、可在加减速中变更目标速度、加减速比率。
7、以上是恒定占空比的脉冲输出,用PWM指令还可以输出可变占空比的脉冲信号,多用于照明与电力调节。
OMRON-cj1w-nc413

OMRON-cj1w-nc413
接近开关是一种无需与运动部件进行机械直接接触而可以操作的位置开关,当物体接近开关的感应面到动作距离时,不需要机械接触及施加任何压力即可使开关动作,从而驱动直流电器或给计算机(plc)装置提供控制指令。
接近开关是种开关型传感器(即无触点开关),它既有行程开关、微动开关的特性,同时具有传感性能,且动作可靠,性能稳定,频率响应快,应用寿命长,抗干扰能力强等、并具有防水、防震、耐腐蚀等特点。
产品有电感式、电容式、霍尔式、交、直流型。
接近开关又称无触点接近开关,是理想的电子开关量传感器。
当金属检测体接近开关的感应区域,开关就能无接触,无压力、无火花、迅速发出电气指令,准确反应出运动机构的位置和行程,即使用于一般的行程控制,其定位精度、操作频率、使用寿命、安装调整的方便性和对恶劣环境的适用能力,是一般机械式行程开关所不能相比的。
它广泛地应用于机床、冶金、化工、轻纺和印刷等行业。
在自动控制系统中可作为限位、计数、定位控制和自动保护环节等。
OMRON-cj1w-nc413。
欧姆龙 CJ1W-NC213基本使用
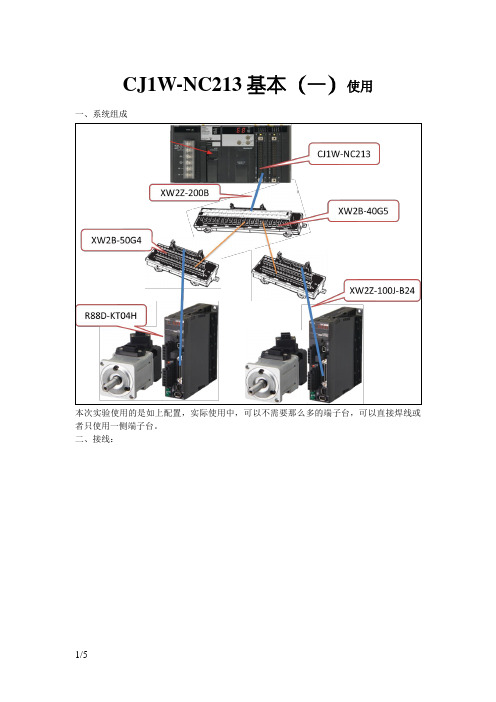
CJ1W-NC213基本(一)使用
一、系统组成
本次实验使用的是如上配置,实际使用中,可以不需要那么多的端子台,可以直接焊线或者只使用一侧端子台。
二、接线:
备注:试验中把极限输入信号类型由默认的NC设置成NO,如下图所示,这样A18/B18、A19/B19可以用常开的开关或者不接。
而A16/B16必须接NC信号,否者伺服报
伺服驱动器参数PN504默认为1,即正反转驱动禁止失效,因此NOT和POT这两根线也可以不接。
三、参数设置
1、NC213设置:公共参数设置如下,即操作数据区从D1000开始,轴参数由D区指定。
备注:具体X/Y轴参数,参考附件程序的I/0表设置。
2、伺服设置
除了自整定修改一些参数外,其他参数保持默认设置,实际使用中可以根据需要做些调整。
四、原点确定:原点确定有两种方法:1、原点搜索,2、当前位置预置。
1、原点搜索
按上图所示进行原点搜索,原点搜索参数设置为:操作模式1,反向模式1,方法0,搜索方向CW。
2、当前位置预置
五、直接操作
点动、相对运行和绝对运行请参看附件程序。
六、内存操作
X/Y轴按上图轨迹运行,可以走相对移动和绝对移动。
1、相对移动设置序列如下:
对X轴启动序列0,X/Y就按上图所示轨迹运行。
2、绝对移动设置如下:
对Y轴启动序列10,X/Y也会按上图所示轨迹运行。